
Executive Summary
The Army has long recognized the potential of robotics on the battlefield. Capitalizing on early work by the Defense Advanced Research Projects Agency (DARPA), it has sponsored basic and advanced research in intelligent systems and led developments in ground vehicle crew automation technology as well as tactical unmanned air vehicles (UAVs). At the same time, the Army has successfully adapted commercial teleoperated ground vehicles for specialized military uses, such as mine clearing and urban reconnaissance, and it has made early progress toward developing semiautonomous mobility capabilities.
The urgent need to transform the Army—from one characterized by heavy armor and firepower into a lighter, more responsive Objective Force that is at once both lethal and survivable—has made development of practical unmanned ground vehicle (UGV) systems a necessity for the future. Concepts for the Army’s Future Combat Systems (FCS), which are now being evaluated, include unmanned systems, both ground and air, and thus will be required for fielding with other elements of the FCS as early as 2010.
The Army plans to use UGVs for such things as weapons platforms, logistics carriers, and surrogates for reconnaissance, surveillance, and target acquisition (RSTA), both to increase combat effectiveness and to reduce the number of soldiers placed in harm’s way. Congress, too, has recognized the potential of unmanned systems and has mandated that at least one of every three future Army systems be unmanned. The Army UGV technology development program includes unmanned ground vehicles; however, it is unclear whether UGV technologies can be developed rapidly enough to keep up with the accelerated acquisition pace of the Army FCS program.
Unmanned ground vehicle systems are one of the few areas across the entire Department of Defense (DOD) that legitimately qualifies as having “leap-ahead” (revolutionary as opposed to evolutionary) potential for the battlefield. Considering that it has taken more than 40 years to develop rudimentary unmanned air vehicles, which operate in a relatively simple operational environment, the Army faces a daunting challenge to develop UGV systems. The efforts required to organize and to manage the evolution of technologies and integration of systems will be immense.
This study was sponsored by the Assistant Secretary of the Army (Acquisition, Logistics, and Technology), who requested that the National Research Council undertake the following:
-
Review Army operational requirements for UGVs, including the Army Future Combat Systems (FCS) baseline program, the Army Research Laboratory (ARL) UGV science and technology objective (STO), and other UGV requirements.
-
Review the current Army UGV efforts at ARL and the Army Tank-Automotive Research, Development, and Engineering Center (TARDEC).
-
Review the state of the art in unmanned vehicle technologies applicable to UGV systems (e.g., “intelligent” perception and control, adaptive tactical behaviors, human–system interfaces).
-
Identify issues relating to technical risks and the feasibility of implementing applicable UGV technologies within the FCS baseline program time frame.
-
Document the results of the examination in a study report that will be provided to the Army. The report will contain a recommended roadmap for the development of UGV technology and systems, including topics that could be the subjects of investigations of longer-term (2015 and beyond) UGV technology applications.
Answers to specific questions in each of the last four task areas are highlighted in the study report and provided in this executive summary.
OPERATIONAL AND TECHNICAL REQUIREMENTS
At the time of the study, the Army had not established a plan for integrating UGV and other technologies into an FCS roadmap. The absence of definitive UGV requirements made it difficult to determine where the Army science and technology (S&T) community should place emphasis in technology development. To help resolve this problem, in early 2002 the Army selected a lead system integrator (LSI) for the FCS program, who requested proposals from industry on concepts for three FCS UGV systems, including the following:
-
Soldier UGV, a small soldier-portable reconnaissance and surveillance robot
-
Mule UGV, a 1-ton vehicle suitable for an RSTA or transport/supply mission
-
Armed reconnaissance vehicle (ARV) UGV, a 6-ton vehicle to perform the RSTA mission, as well as a fire mission, carrying a turret with missile and gun systems.
UGVs can be developed in all sizes and outfitted to perform an assortment of military tasks. Aside from scale and function, a major characteristic of any UGV is its level of autonomy, ranging from 100 percent teleoperated (remote operation), through various stages of semiautonomy, to fully autonomous (ideal). Numerous military and civilian applications for small, teleoperated UGVs are in advanced development and have seen wide use. Improvements in the human–robot interface would greatly increase their effectiveness.
Increasing levels of autonomy in future UGVs would greatly expand the list of military uses. Army STOs have been focusing on technologies needed for semiautonomous mobility from point A to point B (A-to-B mobility), which is uniformly recognized as crucial to the ultimate acceptability of autonomous ground vehicles.
To facilitate its work, the Committee on Army Unmanned Ground Vehicle Technology categorized UGVs as belonging to one of four capability classes. These classes are distinguished by the following characteristics:
-
Teleoperated ground vehicle (TGV)—In teleoperation, a human operator controls a robotic vehicle from a distance. The operator conducts all cognitive processes. The sensors onboard the vehicle and the communications link allow the operator to visualize the UGV’s location and movement within its environment. TGVs come in all sizes.
-
Semiautonomous preceder-follower (SAP/F-UGV)—Like the TGV, SAP/F-UGVs can come in all shapes and sizes. Follower UGVs are the focus of current Army development and demonstrations. Preceder UGVs are follower UGVs with advanced navigation capability that minimizes the need for operator interaction to achieve A-to-B mobility. The preceder must have sufficient autonomy to move in advance of its controller, which could be a dismounted soldier or a vehicle. It has sufficient cognitive processes onboard to select the best route to traverse an objective designated by the controller without the need for marking terrain.
-
Platform-centric autonomous ground vehicle (PC-AGV)—An autonomous ground vehicle can be assigned a complex task or mission and will then execute it, perhaps acquiring information from other sources as it goes, or perhaps responding to additional commands from a controller, but without requiring further guidance. Military missions demand “responsible” autonomy for PC-AGVs capable of delivering lethal weapons and require fail-safe interrupt mechanisms. PC-AGVs must have autonomous A-to-B mobility and must be able to carry out assigned missions in a hostile environment. As with negotiating difficult terrain, the benchmark here is that the UGV should have survivability and self-defense roughly equivalent to those of a similar manned vehicle sent on the same mission.
-
Network-centric autonomous ground vehicle (NC-AGV)—NC-AGVs are PC-AGVs with levels of autonomy sufficient to operate as independent nodes in a net-centric warfare model. They must be able to receive information from the communications network and incorporate it in their mission execution and respond to appropriate information requests and action commands received from the network, including resolution of conflicting commands. Again, a rough benchmark for operational performance is an equivalent manned system, similarly tasked.
On the surface, the four classes represent a progression of increasing levels of autonomy, but each class has distinctive needs for development in the various UGV technology areas. Using communications technologies as an example: TGVs have a high requirement at all times; SAP/F-UGVs have a moderate requirement for mobility (e.g., placing electronic “breadcrumbs”) or contingencies (unusual obstacles or enemy attack); PC-AGVs have little or no need for human control (unless due to specific mission function); and NC-AGVs have little or no need for human control but high needs for network connectivity.
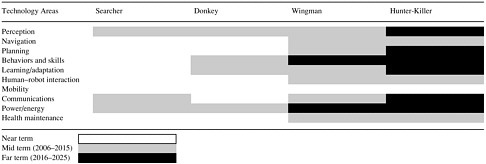
Technology readiness levels (TRLs) can provide a uniform measure for the maturity of different technologies against stated requirements. TRL 6 is especially important, because it is defined as the point when a technology component or subsystem has been demonstrated in a relevant environment. In the absence of firm Army requirements, the study postulated four compelling examples of systems with associated technical requirements that would provide “marks on the wall” against which to estimate the TRLs in each
UGV technology area. The systems postulated by the committee for the study are listed in Table ES-1, and each represents one of the capability classes. The examples include systems with capabilities subsequently implied to be needed for FCS by the LSI.
CURRENT DEVELOPMENT EFFORTS
The Army UGV development program consists of two primary STO efforts: the robotic follower Advanced Technology Demonstration (ATD) managed by TARDEC, and the semiautonomous robotics for FCS STO managed by ARL. In addition to several smaller STO efforts in robotics, the Army also participated in the DEMO III UGV program, which is part of the DOD Joint Robotics Program and has funded several Defense Advanced Research Projects Agency (DARPA) projects, including:
-
Tactical mobile robot
-
Unmanned ground combat vehicle
-
Perception off-road, and
-
Organic air vehicle.
The overall Army UGV program includes teleoperated UGV operations, soldier-in-the-loop experimentation, and demonstrations of both follower and semiautonomous mobility under controlled environments. It is focused on technology demonstrations but has included limited testing and experimentation.
The study found that technologies developed for the follower UGV ATD will achieve the ATD objectives but do not include relevant supporting technologies for likely FCS system-level requirements. Basic semiautonomous off-road mobility is scheduled for demonstration by FY06 under the ATD. The ATD is being restructured (in consonance with other STOs) to focus on the Mule and Armed Reconnaissance Vehicle capabilities, consistent with the concepts requested of industry by the FCS LSI.
The original ARL STO addressed capabilities that would support autonomous requirements that were not addressed in the follower ATD, including planning, navigation, and human–robot interaction. However, the emphasis on demonstrations and the heavy reliance on laser detection and ranging (LADAR) sensors limited advances in perception state of the art. To the extent that the restructured STOs assist the Army in defining system requirements, they are clearly a step in the right direction. It remains to be seen, however, whether the redirected focus on Mule and ARV capabilities will accelerate development of UGV systems.
The study considered other government UGV efforts, including those sponsored by the National Aeronautics and Space Administration (NASA), the Department of Transportation, the Department of Energy (DOE), and the National Institute of Standards and Technology (NIST). Except for the DARPA efforts, the interrelationships between other government UGV efforts and those of the Army are informal and unstructured. But the small size of the UGV industry and the small number of robotics experts tend to encourage technical interchange and collaboration. For example, the Jet Propulsion Laboratory supports NASA, DARPA, and Army robotics programs, so collaboration among these programs can be very high. Similarly, NIST experts in intelligent systems participated with others in the Demo III program. There is concern, however, that collaboration in some technology areas may be inhibited by intense competition for a limited number of UGV-related contracts.
Foreign research is on a par with U.S. research in some fields relevant to future UGV technology. Based on information available to the committee, however, there are no foreign UGV technology applications that are significantly more advanced than those in this country.
STATE OF THE ART
A UGV consists of a mobility platform with sensors, computers, software (including modules for perception,
TABLE ES-1 Example Systems Postulated by the Committee
navigation, learning/adaptation, behaviors and skills, human–robot interaction, and health maintenance), communications, power, and a separate mission package depending upon the UGV’s combat role. The committee’s study assumed that technologies needed for the mission-function packages would be developed independently.
Autonomous Behavior Technology Areas
All of the UGV system components are illustrated in Figure ES-1. The committee assessed the state of the art in UGV-specific and supporting technology areas to uncover capability gaps and estimate technology readiness. Table ES-2 provides committee estimates for when TRL 6 will be reached in each of the technology areas for the four postulated examples. Tables ES-3 and ES-4 outline capability gaps by technology area for each example along with the committee’s assessment of difficulty and/or risk.
Perception
The greatest uncertainties in perception technologies, including sensors and software for mobility and situational awareness, are in describing UGV performance and in determining the effect of perception (and other technology subsystems) on overall UGV system performance. Metrics do not exist, and there are no procedures for benchmarking algorithms, so there is considerable uncertainty as to whether the current algorithms are the best available. In the absence of metrics and data, there is little basis for system optimization and a corresponding uncertainty about performance losses due to system integration issues. There is no systematic way to determine where improvements are required and in what order. The uncertainties exist because perception technologies other than basic sensors have not been emphasized in the Army program, and adequate resources have not been applied.
Navigation and Planning
Achieving nearly fully autonomous UGV navigation will require the integration of perception, path planning, communication, and various navigation techniques. This integration of multiple technologies is the largest technology gap in autonomous navigation. UGVs must be able to detect when they are lost and then react appropriately. The ability to detect navigation errors will have to be developed. Further integration between navigation and communication technologies will help to create more robust positioning solutions.
While path planning for a single UGV is relatively mature, algorithm developments for multiple UGV and UAV
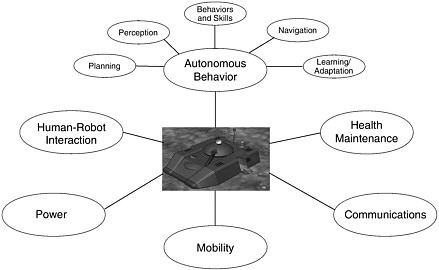
FIGURE ES-1 UGV technology areas.
TABLE ES-2 Estimates of When TRL 6 Will Be Reached for Autonomous Behavior and Supporting Technology Areas
|
 |
planning (both path planning and mission planning) are relatively immature. When planning the path of multiple UGVs and UAVs, the bandwidth of communications between vehicles is a very important factor. Trade studies need to be performed to determine how much bandwidth is available and how the requirements will vary for specific missions. Once this is determined, it will be possible to develop the appropriate path planners for multiple coordinated vehicles.
Tactical Behaviors and Learning/Adaptation
Technologies for UGV behaviors (both tactical and cooperative) are still in their infancy. Development of modules to enable complex tactical behaviors, such as difficult terrain negotiations or stealthy operations, will not happen in the near term. Although some simple cooperative control strategies have been demonstrated at universities and at the national laboratories, there is still no basic understanding of how to design cooperative behaviors for multiple robots.
There is significant uncertainty about the degree to which methods from machine learning will ultimately provide software solutions for complex, real-world problems like UGVs. Critical missing elements are measures for the complexity of the environment in which UGVs will have to operate that enable comparison with the levels of complexity that high-level control algorithms (i.e., current decision-making algorithms) can effectively handle. Funding for research is less of a factor for advances in this area given the amount and intensity of research devoted to machine-learning paradigms, particularly in academia.
UGVs capable of adaptive behaviors sufficient to deal with complex and changing battlefield environments are far from reality. Uncertainty exists on where to draw the line between adaptive control solutions and artificial intelligence solutions. This applies to all of the software-based components of the autonomous system, including perception, navigation, planning, and behaviors.
Supporting Technology Areas
Developments in several supporting technology areas, not totally unique to unmanned ground vehicles, are essential to the development of UGV systems. These include human–robot interaction, mobility, communications, power/ energy, and vehicle health-maintenance technologies.
Human–Robot Interaction
Human–robot interaction (HRI) requirements involve more than basic man–machine interfaces and will be much more demanding than those for commercial robots. Multimodal interfaces, including distinctive sounds and gestures for operations in combat, must be developed. The Army must consider requirements for secure, natural-user interfaces. Studies are needed to determine optimum means for all facets of soldier–robot and robot–robot interactions. HRI technology is resource-intensive and will require many experiments and tests under realistic conditions to achieve acceptable levels of reliability.
Mobility
The mobility platform is highly application-dependent. Platforms for different mission applications will have to be designed based on differences in the mission requirements. While a UGV has the advantage of not needing to be designed around human crew limitations, it also has the disadvantage of needing mechanisms to replace human driving judgment. Thus, salient uncertainty surrounds how design requirements for UGV mobility platforms can be integrated with perception technologies to provide the capability to avoid obstacles, both positive and negative, that the platform is not hardened to overcome. The overall risk associated with building different mobility platforms will be less than that of developing sensors and software capable of successful mobility.
TABLE ES-3 Capability Gaps in Autonomous Behavior Technologies
|
Degree of Difficulty/Risk |
|
|||
|
Low |
|
|||
|
Medium |
||||
|
High |
||||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
Perception |
||||
|
A-to-B mobility on-road |
|
Algorithms and processing fast enough to support 40 km/h (road-following, avoidance of moving and static obstacles). |
Algorithms and processing fast enough to support 100 km/h (road-following, avoidance of moving and static obstacles). Sensors with long range. |
Algorithms and processing fast enough to support 120 km/h (road following, avoidance of moving and static obstacles). Sensors with long range. |
|
A-to-B mobility off-road |
Algorithms for real-time two-dimensional mapping and localization. |
Detect and avoid static obstacles (positive and negative) at 40 km/h day or night. |
Sensors and strategies for fine positioning in bushes. |
Algorithms for multiple sensor and data fusion. |
|
Miniature hardened range sensors. |
Classify terrain (traversable at speed, in low visibility). |
Detect and avoid obstacles at 100 km/h. |
Detect and avoid static obstacles at 120 km/h. |
|
|
All-weather sensors. |
Classify vegetation as “push through” or not, detect water, mud, and slopes. |
Classify terrain and adapt speed, control regime. |
Classify terrain and adapt speed, control regime. |
|
|
|
Algorithms for GPS mapping and corrections. |
Continually assess terrain for potential cover and concealment. Multiple sensor fusion. |
Continually assess terrain for cover and concealment. |
|
|
Situation awareness |
|
Algorithms for detecting humans (even lying down, versus other obstacles). |
Track manned “leader” vehicle. |
Algorithms and sensors to recognize movement and identify source. |
|
Sensors and algorithms for detecting threats. |
Select suitable OP (provides LOS cover and concealment). |
Select suitable OP (provides LOS cover and concealment). |
||
|
|
Detect, track, and avoid other vehicles or people. |
Detect, track, and avoid other vehicles or people. |
||
|
Distinguish friendly and enemy combat vehicles. |
Distinguish friendly and enemy combat vehicles. |
|||
|
Detect unanticipated movement or activities. |
Detect unanticipated movement or activities. |
|||
|
Acoustic, tactile sensors for recognition. |
Detect potential human attackers in close proximity. |
|||
|
|
Sensors while concealed (indirect vision). |
|||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
|
Localization to coordinate multirobots. |
|||
|
|
Identify noncombatants. |
|||
|
Navigation |
|
Relative navigation utilizing communications and GPS. |
Integration of GPS, digitized maps, and local sensors. |
Error detection and correction. |
|
Planning |
|
|
||
|
Path |
Use DTED maps; 1-km replanning for obstacle avoidance. |
Plan relative to leader; reason about overlapping views. |
Tactical formation planning. |
|
|
Electronic “breadcrumbs.” |
Plan to rejoin or avoid team; use features other than terrain. |
Adjust route based on external sensor inputs. |
||
|
Decision template for alternative routing. |
Reasoning algorithms to identify and use concealment. |
Plan to optimize observation points, target kill arrays, and communication links. |
||
|
|
Multiobject and pursuit-evasion path planning for multiple UGVs. |
|||
|
Mission |
|
Mimic leader actions. |
Plan for complex missions including combat survival. |
|
|
Independent actions. |
Plan for team and marsupial operations. Independent actions. |
|||
|
Behaviors and skills |
||||
|
Tactical skills |
Basic nonlethal self-protection if touched or compromised. |
Avoid enemy observation. |
Hooks for specialized mission functions (e.g., RSTA, indirect fire). |
Independent operations; fail-safe controls for lethal missions. |
|
“Flee and hide.” |
Self-protection. |
Self-preservation and defensive maneuvers. |
||
|
|
Complex military operational behaviors. |
Complex military operational behaviors. |
||
|
Cooperative robots |
|
|
Formation controls of multiple UGVs. |
Formation controls of multiple UGVs and UAVs. |
|
Cooperation for such tasks as hiding in bushes. |
|
|||
|
Learning/adaptation |
Basic learning for survivability. |
Advanced terrain classification. |
Advanced fusion of multiple sensor and data inputs. |
|
|
Basic machine learning augmentation of behaviors. |
Advanced machine learning augmentation of behaviors. |
|||
TABLE ES-4 Capability Gaps in Supporting Technology Areas
|
Degree of Difficulty/Risk |
|
|||
|
Low |
||||
|
Medium |
||||
|
High |
||||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
Human–robot interaction (HRI) |
Telesystem HRI algorithms that support 1 operator per robot. |
Semiautonomous HRI algorithms that support 1 operator per 5 homogeneous robots. |
Natural user interfaces. |
Natural user interfaces. |
|
Multimodal interfaces (nlp, gesture). |
Natural user interfaces. |
Diagrammatic and multimodality interfaces. |
Methods for interacting and intervention under stress. |
|
|
Semiautonomous HRI algorithms that support multiple operators. |
Near-autonomous HRI algorithms that support multiple operators and robots. |
|||
|
Mobility |
Ability to right itself in restrictive passages/areas. |
Platform capable of handling 40 km/h on smooth terrain with sensitive payload. |
Platform capable of handling 100 km/h on smooth terrain with sensitive payload. |
Heterogeneous marsupialism to transport specialized robots and sensors. |
|
Platform capable of handling 40 km/h on rough terrain with sensitive payload. |
Platform capable of handling 100 km/h on rough terrain with sensitive payload. |
Platform capable of handling 120 km/h. |
||
|
Communications |
High bandwidth for secure video; local to group. |
Low bandwidth for “breadcrumbs,” local to group. |
Medium bandwidth for mobile network, local to group. |
High bandwidth for secure and reliable network-centric communications. |
|
Wireless backup for line-of-sight communications. |
Large amounts of distributed information. |
|||
|
Power/energy |
High energy density rechargeable battery. |
High energy density rechargeable battery. |
Highly efficient stealth energy system. |
Long standby (30 days). |
|
Small, hybrid energy system. |
Highly efficient stealth energy system. |
|||
|
High-speed mobility enablers. |
||||
|
Health maintenance |
High physical reliability, low maintenance. |
High physical reliability, low maintenance. |
Design for combat survivability. |
Self-repair by reconfiguring components. |
|
Cooperative diagnostics for remote operator. |
Algorithms for self-diagnosis. |
Self-repair by self-reprogramming. |
||
|
Ability to know when to call for help. |
||||
Communications
Shortcomings in communications technologies that apply to manned systems also apply to UGVs. But communications are much more crucial to UGV system performance. Near-term wireless solutions, for example, are problematic. Network connectivity could easily be lost due to non–line-of-sight interference caused by terrain or other obstacles. Security attacks on dispersed unmanned systems could include denial of service, compromising of classified, high-value tactical information, corruption of information, and, in the extreme, usurpation of the system.
Communications for mobility management, of increasing importance to network-centric operations, must ensure that there will always be network participants on station to provide relay when needed. Disparate efforts in communications for both manned and unmanned systems must be based on a common vision and technical architecture and conform to common interface standards.
Power/Energy
Until one specifies a mission time requirement in kilowatt-hours (kWh), power/energy technologies may not be of concern. Short-duration, low-energy mission requirements can be met now. However, there are problems with providing extended-duration communications, such as streaming video, for small UGVs. For high-energy missions, the following issues must be addressed: catalysts for reforming fuel, thermal rejection processes, stealth, and energy storage and replenishment.
Health Maintenance
Tool sets consisting of sensors, diagnostics, and recovery methods must be based on operational requirements. Coming up with a calculus of diagnosis and recovery, similar to the triple-redundancy development systems and design logic used for NASA systems, will be a major challenge. Like human–robot interaction technologies, health maintenance developments will require extensive experimentation and testing.
TECHNOLOGY INTEGRATION AND ROADMAPS TO THE FUTURE
The Army’s UGV technology development program is not organized so as to enable the acceleration of system-level UGV developments. Development and insertion of individual “entry-level” UGV technologies is possible, but necessary technology components for HRI, mobility, power/ energy, communications, and health maintenance all depend heavily on system-level requirements that are currently unknown. Efforts on multiple technology development fronts now cover several different operational applications. Performance levels for the Army and DARPA FCS efforts should be synchronized to facilitate the definition of valid technical parameters. The Demo III project demonstrated many UGV system components, but it did not test a UGV system. Standards must be developed for measuring important system characteristics, such as perception for autonomous mobility. While relevant technologies will be enabled, the lack of user pull is a major impediment to achieving timely integration of capable UGV systems.
To accelerate the pace of technology development, the current UGV program should be upgraded to emphasize the collection of data under a variety of stressing conditions. The data will enable predictive models of system performance and support the systems engineering process essential for integration of relevant technologies. The models will also support the development of realistic simulations to use in developing concepts of operation and in exploring the utility of different classes of UGVs.
The committee was able to estimate milestones from a purely engineering perspective for a UGV system development program leading to the production of the four systems postulated by the study. Figure ES-2 estimates milestone dates for development of the four systems based on the TRLs in relevant technology areas. The milestones assume that the system developments are interdependent, each building on R&D accomplished to achieve capabilities needed for a preceding system. It was also assumed that the advanced capabilities needed by the Hunter-Killer would be identified as goals from the outset and that all capability gaps identified by the committee would be filled in a timely fashion. It should be emphasized that the milestones represent optimistic estimates for UGV systems of unquestioned utility on the battlefield and not for “entry-level” systems or prototypes.
RECOMMENDATIONS
The following recommendations address technical content, time lines and milestones of the UGV efforts for FCS. First, the Army should focus S&T efforts on the perception technology area, with other priority areas dependent on capability class. Second, the Army should adopt a “skunk-works” approach to develop the essential perception technologies to enable autonomous A-to-B mobility capabilities that can be fielded with multiple UGV systems as experimental prototypes for possible insertion in the FCS program. Third, the Army should begin immediately to fill a void in systems engineering by defining system requirements, planning for life-cycle support, establishing milestones for development of assessment methods and metrics for UGV systems, and taking advantage of modeling and simulation tools. Finally, the Army should designate a high-level advocate to accelerate S&T time lines and take the lead in integrating UGV technologies into prototypical systems.
The committee reasoned that only a “skunk-works” approach would bring together the necessary resources, focus,
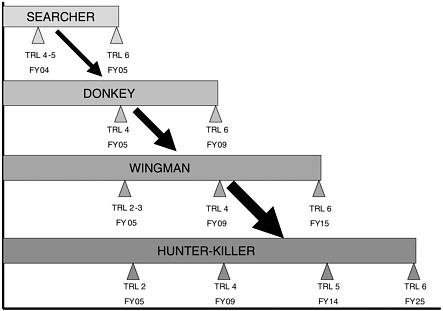
FIGURE ES-2 Time lines for development of example UGV systems, assuming progressive capability developments.
and leadership to ensure successful development of UGV systems on an accelerated basis. Such an approach would enable metrics to evolve as system prototypes are developed on a sound system-engineering basis and are made available for rigorous testing by the user. Above all, the approach relies on a strong advocate to guide the process and make sure that parallel efforts are mutually supportive.
Development Priorities
Clearly, the highest priority for the Army should continue to be to develop perception technologies for autonomous mobility. On-road and off-road mobility is fundamental to the acceptability of three of the four systems postulated by the study. The maturity of on-road capabilities, on both structured and unstructured roads, must be emphasized. The current level of perception capability cannot support an autonomous cross-country traverse of tactical significance, at tactical speeds, under combat conditions.
Perception technologies, including sensors, algorithms (particularly for data fusion and for “active vision” in multiple modalities), and processing capabilities, are essential. The Army can improve individual sensor capabilities and algorithms, but a big problem that has been largely unacknowledged is optimizing the perception system hardware and software architecture: sensors, embedded processors, coded algorithms, and communication buses. The perception subsystem thus presents a very complicated system-engineering problem that is exacerbated by having work carried out by separate organizations in separate programs. There is currently no way to know how perception performance is reduced by suboptimized architecture or where improvements might be made.
Other priorities for earliest attention vary with capability class. For teleoperated ground vehicles (TGVs), human–robot interaction, health maintenance, communications, and power/ energy technologies assume major prominence. Current robots rely on teleoperation using PC user interfaces, such as keyboards and touch screens that are demanding to operate and have not been validated by human factors experts. Techniques to augment external navigation controls with algorithms for real-time mapping and localization for outdoor missions would reduce the stress on operators and enable a single operator per robot. Current TGV systems also require many more technicians for repair and preventive maintenance than do manned systems. Future TGVs (and UGVs in all classes) must be able to self-monitor and to provide information to remote locations for diagnosis and possible recovery.
Such vehicles should be designed with behaviors and characteristics that facilitate their own survivability.
For the semiautonomous preceder/follower (SAP/F-UGV) class of vehicles, mobility, navigation, tactical behaviors, and health maintenance technologies are all high priorities. Successful integration of navigation technologies with an all-terrain mobility platform could enable preceder/follower UGVs to serve not only as logistics carriers but also as lead elements for small-unit patrols or for soldier-portable vehicles for use on security outposts. These UGVs must be operationally reliable to a degree many times greater than manned vehicles. Depending on application, basic tactical behaviors will be required to ensure that SAP/F-UGVs can perform missions without becoming a burden on the battlefield.
Priority technologies for platform-centric autonomous ground vehicles (PC-AGVs) include those for the SAP/F-UGV class (mobility, navigation, tactical behaviors, and health maintenance) plus learning/adaptation technologies. To be useful for extended-duration missions, PC-AGVs must be capable of adapting embedded tactical behaviors to changing situations without requiring reprogramming in the field. Ideally, lessons learned would be cumulative and could be transferred to other PC-AGV systems.
Communications, including mobile self-configuring networks and distributed knowledge bases, become all-important for the network-centric AGV class. To respond to multiple demands, NC-AGVs must be tightly networked with other FCS elements and information systems on the battlefield. Other priority technologies include mobility (to provide versatile, multifunction platforms), human–robot interaction (to ensure proper task allocation between soldier– robot and robot–robot), and learning/adaptation (to expand the range of autonomous behaviors).
Recommendation 1. The Army should give top priority to the development of perception technologies to achieve autonomous mobility. In addition, it should focus on specific technologies depending on unmanned ground vehicle capability class.
Focus on Compelling Army Applications
The capabilities of UGVs should complement what humans can do better, with the aim of maximizing the additional benefits that can be gained by introducing UGVs. Each UGV class should be specified and designed to do what robots can do better (or at lower risk) than humans, rather than trying to imitate what humans already do very well.
Until requirements are validated in the Army user community, there can be no commitment to UGV systems and applications. The existing statements of requirements are insufficient to guide and stimulate technological evolution. This has forced UGV development into a technology-push mode, rather than a balance between technology-push and requirements-pull modes. For UGV systems to be a major factor in the Objective Force, a process of spiral development involving the user will be necessary, including successive iterations of application and capability refinements. Technologies that merit special development attention can then be identified and developed using a “skunk-works” approach that achieves the focus and centralized leadership necessary to reach goals set by the user community.
Such a “skunk-works” approach would consolidate and focus the development of technologies essential to FCS UGVs under a single manager, eliminate duplication of effort, and provide the basis for standardized research platforms to be used in the spiral development of UGV systems. Prototypes resulting from targeted technology development and integration can be used for higher-level developments or for experiments involving particular mission-package applications by the user. Such technology-integrating experiments will help users determine which concepts have the most value and facilitate the development and acceptance of UGV systems.
For the above reasons, the committee believes that the Army UGV program is best served by developing a small number of experimental vehicle types capable of applications with compelling value for FCS and the Objective Force. The aim would be to develop and integrate the technologies required for several classes of vehicle capability. The development process will be best served by systematic and extensive testing and refinement under severe operating conditions. Army mission needs and operational requirements for UGV systems can evolve in a spiral development process as a technology integration program advances, provided the program is focused on maturing the underlying technologies and achieving system integration of those technologies at several useful levels of vehicle capability.
Focusing on a few specific applications for the experimental prototypes, some of which may be simulated, is essential to maturing the needed technologies and resolving the significant issues of system integration. The focus on applications organizes the capabilities development effort into manageable components, each with a clear operational outcome to be achieved. While capabilities may mature at different rates, the program as a whole would address technical challenges of all applications concurrently. The application prototypes should be selected to develop capabilities needed for FCS and the Objective Force. The roadmaps developed as part of the study were built around four such applications, but they illustrate only one of many possible combinations for evolutionary development.
Recommendation 2. The Army should adopt a “skunk-works” approach to develop technologies necessary for autonomous A-to-B mobility, so that such capabilities can be fielded with a small number of unmanned ground vehicle (UGV) classes, each of which is an experimental prototype for a compelling military application. TRADOC and the research and development community should commit to a spiral development process for refining and evolving concept-based requirements for
UGVs, depending on what is learned from these technology-integrating prototypes.
Systems Engineering Challenge
Even when all underlying technologies for a UGV application have reached TRL 6, a great deal of work will be required for integrating specific technologies into one or more UGV systems capable of accomplishing FCS missions. In fact, the committee concluded that the greatest technical challenge for fielding UGVs of significant value to FCS and the Objective Force is likely to be technology integration and systemization. Adequate time must be allowed for the technologies that are developed to be combined and tested in the field in ways that give feedback to the developer and the user communities on how to improve a given concept.
The user and developer communities must work together to provide direction for the technology integration to implement vehicle experiments. These directions should feed into the spiral development process from experimental prototypes to requirements-based systems following the established development process. For example, application parameters must be formulated to address the integration of the mission-package technologies, mobility technologies, and communications technologies that are necessary for each experimental prototype.
Lack of system engineering will hinder development of acceptable UGV systems. Performance metrics and other assessment methodologies must be established that provide objective feedback to developers and users on how well an application-oriented experimental prototype is performing as an integrated system. Supporting technologies for HRI, mobility, power, communications, and vehicle health maintenance, while not part of the autonomous behavior architecture, will nonetheless be critical to UGV system developments. Software quality must also be regarded as an important issue, requiring extensive software engineering, re-implementation, and performance assessments to field a given system. Technology development in all areas will be heavily dependent on system prototypes.
Recommendation 3. The Army should begin planning for unmanned ground vehicle (UGV) system development now. Systems-engineering processes should be used to inform and guide the development of UGV operational concepts and technology.
Advocate for UGV Development
The Army’s UGV program must cut across existing program “stovepipes” and increase dedicated resources. If the objective is to field a network-centric autonomous ground vehicle for the Objective Force, then the Army must dedicate resources now to basic and advanced research and development with a common focus on achieving this end. A strong central advocate is needed.
Experience has shown that the Army responds well to challenges that are represented by high-level positions or organizations dedicated to a single purpose. The Army Digitization Office, established in the 1990s by the Army Chief of Staff, provides a good example of how such focus can be used to move a project forward that might otherwise become lost in the bureaucracy. Similarly, special Army selection boards exist to select highly qualified personnel for designation as program managers (PMs) for technology and system developments of high-level importance.
Although UGV system concepts and requirements are not sufficiently advanced to merit the same approach at this time, extraordinary measures analogous to the Digitization Office initiative should be considered as the UGV program matures beyond the S&T stage. In the interim, a board-selected PM for UGV technology and system developments would be able both to serve as an advocate for autonomous systems and to focus development effort on achieving A-to-B mobility capabilities and developing experimental prototypes, thereby advancing the experimentation for and acceptance of UGV systems. This new position would contrast with the present program manager positions (for FCS and the Objective Force), which are focused on objectives that can be achieved with or without a dollar of investment in underlying UGV technology. The new position would not duplicate the functions of the DOD UGV PM position, which is focused on integrating UGV systems using existing technologies in response to specific, DOD-endorsed requirements.
Recommendation 4a. The Army should designate a Program Manager for Unmanned Ground Vehicles (PM-UGV) to coordinate research, development, and acquisition of Army UGV systems. The PM-UGV would act for the Assistant Secretary of the Army (Acquisition, Logistics, and Technology) to manage Army UGV technology developments, approve technology base planning, provide acquisition guidance, and oversee resource allocation. The PM would be the Army’s principal advocate for unmanned ground systems and single point of contact for UGV developments with the Joint Program Office, the Defense Advanced Research Projects Agency, and other agencies.
Recommendation 4b. As the unmanned ground vehicle (UGV) program matures beyond the S&T stage, the Army should consider additional extraordinary measures, analogous to the successful Army digitization initiatives, to ensure sufficient focus on developing and fielding UGV systems for the Future Combat Systems and the Objective Force.












