
4
Autonomous Behavior Technologies
An unmanned ground vehicle (UGV) encompasses the broad technology areas depicted in Figure 4-1. The next two chapters review and evaluate the state of the art in each of these UGV technology areas. This chapter evaluates technologies needed for the autonomous behavior subsystems that are unique to unmanned systems: perception, navigation, planning, behaviors and skills, and learning/adaptation.
As part of the evaluation of each technology area the committee estimated technology readiness levels (TRL) relative to the development of specific UGV systems. Table 4-1 summarizes the basic criteria for TRL estimates.
Technology areas responsible for autonomous behavior are depicted in Figure 4-2. It is important to note that these technologies are software-based, except for sensors (needed for A-B mobility and situation awareness). The figure illustrates how the software subsystems depend upon each other and are linked together to provide “intelligence” for a UGV.
The Perception subsystem takes data from sensors and develops a representation of the world around the UGV, called a world map, sufficient for taking those actions necessary for the UGV to achieve its goals. It consists of a set of software modules that carry out lower-level image-processing functions to segment features in the scene using geometry, color, or other properties up to higher-level reasoning about the classification of objects in the scene. The Perception subsystem can control sensor parameters to optimize perception performance and can receive requests from the planner or from the behaviors and skills subsystem to focus on particular regions or aspects of the scene.
The Navigation subsystem keeps track of the UGV’s current position and pose (roll, pitch, yaw) in absolute coordinates. It also provides the means to convert vehicle-centered sensor readings into an absolute frame of reference. It will generally use a variety of independent means such as an IMU (inertial measurement unit), GPS (global positioning system), and odometry with estimates from all combined by a Kalman filter or something similar. It may make use of visual landmarks if they can be provided by the Perception subsystem.
The Planning subsystem is a hierarchy of modules: the Mission Planner decides B is the destination; the Navigator does global A to B path planning based on an a priori map and other data; the Pilot does moment-to-moment trajectory planning. Using information from the Navigation subsystem and the world model, the planner can also plan sensor and sensor data-processing activities. For example, it can cue certain sensors to point in a particular direction or activate a specific feature detection algorithm.
Software for Behaviors and Skills combines inputs from Perception, Navigation, and Planning and translates them into motor commands for the UGV to move and accomplish work. This also includes software necessary for the robot to accomplish specific mission-functions, including those based on tactics, techniques, and procedures used in military operations.
Learning/Adaptation software is used to improve performance through experience. It offers a way for a system to become robust over time (i.e., to be able to handle variability not initially anticipated by the system’s programmers). Learning is not implemented as a separate subsystem but is incorporated as part of Perception, Navigation, Planning, and Behaviors.
PERCEPTION
The perception technologies discussed in this section include the sensors, computers, and software modules essential for the fundamental UGV capabilities of A to B mobility and situation awareness. The section describes the current state of the art, estimates the levels of technology readiness, identifies capability gaps, and recommends areas of research and development needed. Additional details relating to perception for autonomous mobility are contained in Appendix C.
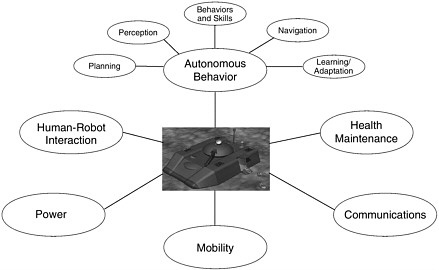
FIGURE 4-1 Areas of technology needed for UGVs.
A UGV’s ability to perceive its surroundings is critical to the achievement of autonomous mobility. The environment is too dynamic and map data too inaccurate to rely solely on a single navigation means, such as the global positioning system (GPS). The vehicle must be able to use data from onboard sensors to plan and follow a path through its environment, detecting and avoiding obstacles as required.
The goal of perception technology is to relate features in the sensor data to those features of the real world that are sufficient, both for the moment-to-moment control of the vehicle and for planning and replanning. Humans are so good at perception, the brain does it so effortlessly, that we tend to underestimate its difficulty. It is difficult, both because the perception process is not well understood and because the algorithms that have been shown to be useful in perception are computationally demanding.
Technical Objectives and Challenges
The actions required by a UGV to move from A to B take place in a perceptually complex environment. An FCS UGV is likely to operate in any weather (rain, fog, snow), during day or night, in the presence of dust or other battlefield obscurants, and in conjunction with friendly forces opposed by an enemy. Perception system tasks are summarized in Table 4-2.
The UGV must be able to avoid positive obstacles such as rocks or trees (or indoors obstacles like furniture) and a negative obstacle such as a ditch. Water obstacles present special challenges; the UGV must avoid deep mud or swampy regions, where it could be immobilized, and must traverse slopes in a stable manner so that it will not turn over. The move from A to B can take place in different terrains and vegetation backgrounds (e.g., desert with rocks and cactus, woodland with varying canopy densities, scrub grassland, on a paved road with sharply defined edges, in an urban area), with different kinds and sizes of obstacles to avoid (rocks in the open, fallen trees masked by grass, collapsed masonry in a street), and in the presence of other features that have tactical significance (e.g., clumps of grass or bushes, tree lines, or ridge crests that could provide cover).
Each of these environments imposes its own set of demands on the perception system, modified additionally by such factors as level of illumination, visibility, and surrounding activity. In addition to obstacles it must detect such features as a road edge if the path is along a road, or features indicating a more easily traversed local trajectory if it is operating off-road. The perception system must be able to detect, classify, and locate a variety of natural and manmade features to confirm or refine the UGV’s internal estimate of its location (recognize land marks); to validate assumptions made by the global path planner prior to initiation of the
TABLE 4-1 Criteria for Technology Readiness Levels
|
TRL Number |
Description |
|
1. Basic principles observed and reported |
Lowest level of technology readiness. Scientific research begins to be translated into applied research and development. Examples might include paper studies of a technology’s basic properties. |
|
2. Technology concept and/or application formulated |
Invention begins. Once basic principles are observed, practical applications can be invented. The application is speculative and there is no proof or detailed analysis to support the assumption. Examples are still limited to paper studies. |
|
3. Analytical and experimental critical function and/or characteristic proof of concept |
Active research and development is initiated. This includes analytical studies and laboratory studies to physically validate analytical predictions of separate elements of the technology. Examples include components that are not yet integrated or representative. |
|
4. Component and/or breadboard validation in laboratory environment |
Basic technology components are integrated to establish that the pieces will work together. This is relatively “low-fidelity” compared to the eventual system. Examples include integration of ad hoc hardware in a laboratory. |
|
5. Component and/or breadboard validation in relevant environment |
Fidelity of breadboard technology increases significantly. The basic technological components are integrated with reasonably realistic supporting elements so that the technology can be teased in a simulated environment. Examples include “high-fidelity” laboratory integration of components. |
|
6. System/subsystem model or prototype demonstration in a relevant environment |
Representative model or prototype system, which is well beyond the breadboard tested for TRL 5, is tested in a relevant environment. Represents a major step up in a technology’s demonstrated readiness. Examples include testing a prototype in a high-fidelity laboratory environment or in simulated operational environment. |
|
7. System prototype demonstration in an operational environment |
Prototype near or at planned operational system. Represents a major step up from TRL 6, requiring the demonstration of an actual system prototype in an operational environment, such as in an aircraft, vehicle, or space. Examples include testing the prototype in a test-bed aircraft. |
|
8. Actual system completed and “fight qualified” through test and demonstration |
Technology has been proven to work in its final form and under expected conditions. In almost all cases, this TRL represents the end of true system development. Examples include developmental test and evaluation of the system in its intended weapon system to determine if it meets design specifications. |
|
9. Actual system “fight proven” through successful mission operations |
Actual application of the technology in its final form and under mission conditions, such as those encountered in operational, test and evaluation. In almost all cases this is the end of the last “bug-fixing” aspects of true system development. Examples include using the system under operational mission conditions. |
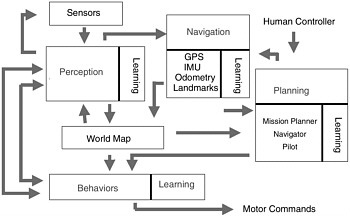
FIGURE 4-2 Autonomous behavior subsystems. Courtesy of Clint Kelley, SAIC.
TABLE 4-2 Perception System Tasks
|
On-Road |
Off-Road |
|
Find and follow the road |
Follow a planned path subject to tactical constraints. |
|
Detect and avoid obstacles |
Find mobility corridors that enable the planned path or that support replanning. |
|
Detect and track other vehicles |
Detect and avoid obstacles. |
|
Detect and identify landmarks |
Identify features that provide cover, concealment, vantage points or as required by tactical behaviors. Detect and identify landmarks. Detect, identify, and track other vehicles in formation. Detect, identify, and track dismounted infantry in force. |
traverse (e.g., whether the region of the planned path is traversable); to gather information essential for path replanning (e.g., identify potential mobility corridors) and for use by tactical behaviors1 (e.g., “when you reach B, find and move to a suitable site for an observation post” or “move to cover”). The perception horizon begins at the front bumper and extends out to about 1,000 meters. Figure 4-3 illustrates the different demands that might be placed on a UGV perception system.
Specific objectives for A-to-B mobility are derived from the required vehicle speed and the characteristics of the assumed operating environment (e.g., obstacle density, visibility, illumination [day/night], and weather [affects visibility and illumination but may also alter feature appearance]). Table C-1 in Appendix C summarizes the full scope of environments, obstacles, and other perceptual challenges to autonomous mobility.
State of the Art
In the 18 years since the beginning of the Defense Advanced Research Projects Agency (DARPA) Autonomous Land Vehicle (ALV) program, there has been significant progress in the canonical areas of perception for UGVs: road-following, obstacle detection and avoidance (both on-road and off), and terrain classification and traversability analysis for off-road mobility. There has not been comparable progress at the system level in attaining the ability to go from A to B (on-road and off) with minimal intervention by a human operator. There are significant gaps in road-following capability and performance characterization particularly for the urban environment, for unstructured roads, and under all-weather conditions. Driving performance more broadly, even on structured roads, is well below that of a human operator. There is little evidence that perception technology is capable of supporting cross-country traverses of tactical significance, at tactical speeds, in unknown terrain, and in all weather, at night, or in the presence of obscurants. Essentially no perception capability exists (excluding limited UGV RSTA [reconnaissance, surveillance, and target acquisition] demonstrations) beyond 60 meters to 80 meters. Ability to detect tactical features or to carry out situation assessment in the region 100 meters to 1,000 meters is nonexistent as a practical matter.
The state of the art is based primarily on the DOD and Army Demo III project, the DARPA PerceptOR (Perception Off-Road) project, and research supported by the U.S. Department of Transportation, Intelligent Transportation Systems program. The foundation for much of the current research was provided by the DARPA ALV project, 1984–89, and the DARPA/Army/OSD Demo II project, 1992–98. Perception capabilities demonstrated by these and other projects are described in Appendix C and Appendix D.
On-Road
Army mission profiles show that a significant percentage of movement (70 percent to 85 percent) is planned for primary or secondary roads. Future robotic systems will presumably have similar mission profiles with significant on-road components. In all on-road environments the perception system must at a minimum detect and track a lane to provide an input for lateral or lane-steering control (road-following); detect and track other vehicles either in the lane or oncoming to control speed or lateral position; and detect static obstacles in time to stop or avoid them.2 In the urban environment, in particular, a vehicle must also navigate intersections, detect pedestrians, and detect and recognize traffic signals and signage.
On-road mobility has been demonstrated in three environments: (1) open-road: highways and freeways; (2) urban “stop and go”; and (3) following dirt roads, jeep tracks, paths and trails in less structured environments from rural to undeveloped terrain. Unstructured roads pose a challenge because the appearance of the road is likely to be highly variable, generally with no markings, and edges may not be distinct.
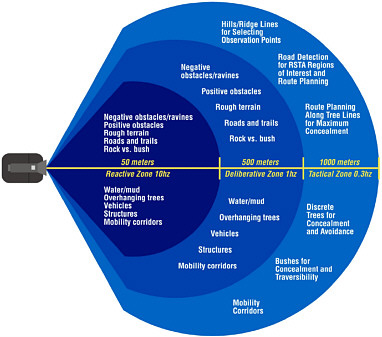
FIGURE 4-3 Perception zones for cross-country mobility. Courtesy of Benny Gothard, SAIC.
Perception for lane detection warning a driver of lane departures on structured, open roads are at the product stage. About 500,000 miles of lane detection and tracking operation has been demonstrated on highways and freeways. Lanes can be tracked at human levels of driving speed (e.g., 65 mph) or better under a range of visibility conditions (day, night, rain) and for a variety of structured roads (see Jochem, 2001). None of the systems can match the performance of an alert human driver using context and experience in addition to perception. Most systems are advisory and do not control the vehicle, although the capability exists to do so.
On-road mobility in an urban environment is very difficult. Road-following, intersection detection, and traffic avoidance cannot be done in any realistic situation. Signs and traffic signals can be segmented and read only if they conform to rigidly defined specifications and if they occupy a sufficiently large portion of the image. Pedestrian detection remains a problem. A high probability of detection is accompanied by a high rate of false positives. Because of the complexity of the urban environment, approaches must be data-driven, rather than model-driven. A variety of specialized classifiers or feature detectors are required to provide accurate and rapid feature detection and classification. Running all of these continuously requires considerable computing power. Research is required on controller strategies to determine which should be active at any time. Active camera control (active vision) is required for the urban environment because of the simultaneous need for wide fields of view and high resolution. Little research has been done on the use of active vision in an urban environment. (See Appendix C.)
Autonomous mobility on less structured roads has not received much emphasis despite its potential military importance. There is no experience comparable to the 500,000 miles or more of lane detection and tracking operation on highways and freeways; limitations are not as well understood and systems are not as robust. The limited experiments suggest UGVs can operate day and night at about human levels of driving speed (e.g., 10 mph to 40 mph) only on unstructured roads (secondary roads, dirt roads, jeep tracks, trails) where the road is dry, relatively flat with gentle slopes, no sharp curves and no water crossings or standing water. The road must be differentiable from background, using readily computed features. Current approaches may lose the road on sharp curves or classify steep slopes as obstacles.
Difficulty will be encountered when the “road” is defined more by texture and context. Performance on unstructured roads can be significantly affected by weather to the extent it reduces the saliency of the perceptual cues, and is likely to vary from road to road. Standing water can be detected but depth cannot be estimated. Mud can be detected in some cases, but not in others. Crown height can be measured but generally is not used. Texture could be used to provide warning of upcoming rough road segments, but computational issues remain.
On-road obstacle detection (other vehicles and static objects) is much less developed than lane tracking. Capability has been demonstrated using both active (LADAR, radar) and passive (stereo-video) sensors. For example, static objects 14 cm tall were detected at distances of 100 meters using stereo-video in daylight (Williamson, 1998). Vehicles were detected at up to 180 meters using radar (Langer and Thorpe, 1997). A very narrow sensor field of view is required to detect obstacles in time to stop or avoid them at road speeds, and sensors and processing must be actively controlled. Most demonstrations of obstacle detection were staged under conditions much less demanding than realworld operations and comprehensive performance evaluation has not been done. Capabilities developed for off-road obstacle detection are applicable to the on-road problem but have been demonstrated only at low speed. On-road obstacle detection has not generally been integrated with lane-tracking behavior for vehicle control.
Road-following assumes that the vehicle is on the road. A special case is detecting a road, particularly in a cross-country traverse, where part of the planned path may include a road segment. The level of performance on this task is essentially unknown.
Road-following capability can support leader-follower operation in militarily significant settings where the time interval between the preceder (route-proofing) vehicle and the follower is sufficiently short so that changes to the path are unlikely. Autonomous, unaccompanied driving behavior, particularly in traffic or in urban terrain with minimum operator intervention, is well beyond the state of the art. Consider the performance of the human driver relative to today’s UGVs. The current road safety statistics for the United States reveal that the mean time between injury-causing crashes is tens of thousands of vehicle hours. By contrast, it would be a major challenge for a UGV to get through 0.1 hours of unassisted driving in moderate to heavy traffic, and it is doubtful that that could be accomplished consistently in a statistically valid series of experiments. Despite impressive demonstrations today’s automated systems remain many orders of magnitude below human driving performance under a realistic range of challenging driving conditions.
Insufficient attention has been given on-road driving behavior in view of Army mission profiles, which call for vehicles to operate mostly on-road. Essentially no research has been done on the additional skills beyond road-following and obstacle avoidance required to enable driving behavior more generally.
Off-Road
Autonomous off-road navigation requires that the vehicle characterize the terrain as necessary to plan a safe path through it and detect and identify features that are required by tactical behaviors. Characterization of the terrain includes describing three-dimensional terrain geometry, terrain cover, and detecting and classifying features that may be obstacles including rough or muddy terrain, steep slopes, and standing water, as well as such features as rocks, trees, and ditches.
No quantitative standards, metrics, or procedures exist for assessing off-road UGV performance. It is difficult to know if progress is being made in off-road navigation and where deficiencies may exist. Unlike road-following, speed as a metric to gauge progress in off-road mobility is incomplete and may be misleading. No meaningful comparisons can be made without knowing the environmental conditions, the details of the terrain, and in particular, how much reliance was placed on prior knowledge to achieve demonstrated performance.
Published results and informal communications provide no evidence that UGVs can drive off-road at speeds equal to those of manned vehicles. Although UGV speeds up to 35 km/h have been reported, the higher speeds have generally been achieved in known benign terrain, and under conditions that did not challenge the perception system nor the planner. During the ALV and Demo II experiments in similar benign terrain, manned HMMWVs (high-mobility multi-purpose wheeled vehicles) were driven up to 60 km/h. In more challenging terrain the top speeds for all vehicles would be lower but the differential likely greater.
The ability to do all-weather or night operations or operations in the presence of battlefield obscurants has not been adequately demonstrated. In principle LADAR-based (laser detection and ranging) perception should be relatively indifferent to illumination and should operate essentially the same in daylight or at night. FLIR (forward looking infrared radar) also provides good nighttime performance. LADAR does not function well in the presence of obscurants. Radar or FLIR has potential depending on the specifics of the obscurant. There has not been UGV system-level testing in bad weather or with obscurants, although experiments have been carried out with individual sensors. Much more research and system-level testing under realistic field conditions are required to characterize performance.
The heavy almost exclusive dependence of DEMO III on LADAR may be in conflict with tactical needs. Strategies to automatically manage the use of active sensors must be developed. Depending on the tactical situation, it may be appropriate to use them extensively, only intermittently, or not at all.
RGB (red, green, blue, including near IR) video provides a good daytime baseline capability for macro terrain classification: green vegetation, dry vegetation, soil/rocks, and sky. Material properties can now be used with geometry to more accurately classify features as obstacles. This capability is not yet fully exploited. More detailed levels of classification during the day require multiband cameras (or a standard camera with filters), use of texture and other local features, and more sophisticated classifiers. Detailed characterization of experimental sites (ground truth) is required for progress. More research is required on FLIR and other means for detailed classification at night. Simple counts of LADAR range hits give a measure of vegetation density, once vegetation has been classified, and provide an indication of whether the vehicle can push through. Reliable detection of water remains a problem. Different approaches have been tried with varying degrees of success. Fusion may provide more reliable and consistent results.
Positive obstacles that subtend 10 or more pixels, that are not masked by vegetation or obscured for other reasons, and are on relatively level ground, can be reliably detected by stereo at speeds no greater than about 20 km/h, depending on the environment. LADAR probably requires 5 pixels and can reliably detect obstacles at somewhat higher speeds (e.g., 30km/h). LADAR, stereo-color, and stereo-FLIR all work well for obstacle detection. Day and night performance should be essentially equivalent, but more testing is required. Again, less is known about performance under bad weather or obscurants.
Little work has been done to explicitly measure the size of obstacles. This bears on the selection of a strategy by the Planner. No proven approach has been demonstrated for the detection of occluded obstacles. LADAR works for short ranges in low-density grass. There have been some promising experiments with fast algorithms for vegetation removal, which could extend LADAR detection range. Some experiments have been done with FOLPEN (foliage penetration) radar but the results are inconclusive. Radar works well on some classes of thin obstacles (e.g., wire fences). LADAR can also detect wire fences. Stereo and LADAR can detect other classes of thin obstacles (e.g., thin poles or trees). Radar may not detect nonmetallic objects, depending on moisture content. Much more research is required to characterize performance.
Detection of negative obstacles continues to be limited by geometry. While performance has improved because of gains in sensor technology (i.e., 10 pixels can be placed on the far edge at greater distances), sensor height establishes an upper bound on performance, and negative obstacles (depressions less than a meter wide) cannot be seen beyond about 20 meters. With the desire to reduce vehicle height to improve survivability the problem will become more difficult.
Little work has been done on detecting tactical features at ranges of interest. Tree lines and overhangs have been reliably detected but only at ranges less than 100 meters. Essentially no capability exists for feature detection or situation assessment for ranges from about 100 meters out to 1,000 meters.
Cross-country capability is very immature and limited. Demonstrations have been carried out in known, relatively benign environments; have seemingly been designed to highlight perception and other system strengths and potential military benefits; and have consequently done much less to advance the state of the art. Such demonstrations may potentially mislead observers as to the maturity of the state of the art.
Improvements in individual sensor capability, sensor data fusion, and in active vision are required to achieve autonomous A-to-B mobility. Improvements in LADAR range, frame rate, and instantaneous field of view (IFOV) are necessary and improvements in video resolution and dynamic range are desirable. Multi- or hyperspectral sensors could substantially improve the ability to do rapid terrain classification in daylight. Multiband thermal FLIR could potentially allow terrain classification at night. However, the conditions under which the UGVs must operate are so diverse that no single sensor modality will be adequate. Different operating conditions (missions, terrains, weather, day/night, obscurants) will pose different problems for each sensor modality, and complementary sensor systems with different vulnerabilities will be needed to provide system robustness through data fusion.
Much work will be required to translate existing research on sensor fusion into a capability for UGVs. Active vision must also be emphasized to address the trade-off between IFOV and required field of regard. Again, research exists but useful applications lag. Use of active vision could provide earlier obstacle detection and reduce the likelihood of the vehicle becoming trapped in a cul-de-sac. The development of appropriate algorithms for data fusion and active vision and their integration into the UGV perception system should be a high priority.
Technology Readiness
Except for the teleoperated Searcher UGV, the example systems defined in Chapter 2 presuppose a number of firm requirements for perception. The most fundamental are those to move autonomously from A to B either on roads or cross-country. Three maximum speeds were specified: 40 km/h, 100 km/h, and 120 km/h. Movement was to take place under day, night, or limited visibility conditions. Table 4-3 refines the TRL criteria used to estimate technology readiness for perception technologies. Tables 4-4 through 4-8 then provide TRL estimates as associated with particular sensor technologies for mobility, detection, and situation awareness. “Speed” in the tables corresponds with the example UGV systems as follows: 40 km/h (Donkey), 100 km/h (Wingman), and 120 km/h (Hunter-Killer). (No perception
TABLE 4-3 Technology Readiness Criteria Used for Perception Technologies
capabilities are required by the Searcher example.) The estimates are highly aggregated judgments of performance across a variety of situations:
-
On-road: Includes performance on structured and unstructured roads from those designed to standards and are well marked to barely perceptible dirt tracks. Structured roads have known, constant geometries (e.g., lane width, radius of curvature) and clear lane and boundary markings. Unstructured roads may be of variable geometry, have abrupt changes in curvature, and may be difficult to distinguish from background (may be paved or unpaved). Environments range from open-road to urban stop-and-go to open road. Performance includes lane-following and speed adjustment to avoid vehicles in lane (moving obstacles). In an urban environment performance may also require intersection detection and navigation and traffic signal and signage recognition and understanding. Obstacle avoidance requires detection of stopped vehicles, pedestrians, and static objects. In a combat environment obstacles may include bomb craters, masonry piles, or other debris. Obstacle detection on unstructured roads, in particular, may be more difficult because curves or dips may limit opportunity to look far ahead.
TABLE 4-4 TRL Estimates for Example UGV Applications: On-Road/Structured Roads
|
Speed (km/h) |
Day |
Night and Limited Visibilitya |
|
Lane-Following and Speed Adjustment (Collision Avoidance) |
||
|
40 |
TRL 4/bTRL 4 SV or MV+R |
TRL 3/cTRL 3 SFLIR or MFLIR+R |
|
100 |
TRL 4/TRL 3 SV or MV+R |
TRL 3/TRL 2 SFLIR or MFLIR+R |
|
120d |
TRL 3/TRL 2 SV or MV+R |
TRL 3/TRL 2 SFLIR or MFLIR+R |
|
Obstacle Avoidance |
||
|
40 |
TRL 3/eTRL 3 SV or LADAR |
TRL 3/fTRL 3 SFLIR, LADAR, radar |
|
100g |
TRL 3/TRL 2 SV or LADAR |
TRL 3/TRL 2 SFLIR, LADAR, radar |
|
120h |
TRL 2/TRL 1 |
TRL 2/TRL 1 |
|
aIncludes rain, snow, fog, and manmade obscurants. bDemonstrated lane-following and speed adjustment. cDemonstrated lane-following only, but speed adjustment with radar demonstrated in daylight should work equally well. dArchitecture must be optimized for real-time performance. The assumption for urban environments is that the vehicle will maneuver similarly to rescue vehicles or police in pursuit (i.e., as fast as circumstances permit but no faster than 120 km/h). eObstacle avoidance integrated with road-following. fWill require data fusion (e.g., multiple IR bands, FLIR with radar). gAt about this speed or greater, active vision required. hNo obstacle detection capability demonstrated at 100 or 120 km/h. Note: TRL = technology readiness level; SV = stereo video; MV+R = monocular video plus radar; SFLIR = stereo forward looking infrared; MFLIR+R = monocular forward looking infrared plus radar; LADAR = laser detection and ranging. |
||
-
Off-road: Terrain types are highly variable (e.g., desert, mountains, swampy terrain, forests, tall-grass-covered plains); have positive and negative obstacles (e.g., ditches, gullies) some of which will be visible and others that will be hidden in cover. Performance requires segmenting the terrain into traversable and nontraversable regions using geometry (i.e., size of features and assessment of material properties [rock, soil, vegetation, including assessment of terrain roughness, fordable water, and trafficability of steep slopes, or muddy or swampy regions]).
-
Detection of tactical features: Requires identifying natural and manmade features that could provide cover or concealment (e.g., tree lines or ridge crests, large rocks, buildings) or support mission packages (e.g., select a site for an observation post). Region: 100 meters to 1,000 meters.
TABLE 4-5 TRL Estimates for Example UGV Applications: On-Road/Unstructured Roads
|
Speed (km/h) |
Day |
Night and Limited Visibility |
|
Lane-Following and Speed Adjustment |
||
|
40 |
TRL 3a SV or MV+R |
TRL 3 SFLIR or MFLIR+R |
|
100b |
TRL 3 |
TRL 3 |
|
120 |
TRL 3 |
TRL 3 |
|
Obstacle Avoidance |
||
|
40 |
TRL 3c |
TRL 3 |
|
100 |
TRL 3 |
TRL 2 |
|
120 |
TRL 2 |
TRL 2 |
|
aNeed color or texture segmentation to cover all likely situations. ALVIN, RALPH, and Robin demonstrated road-following during day. Robin at night with FLIR. Not integrated with speed adjustment (e.g., radar) for unstructured roads nor with obstacle avoidance. bRequire active vision for lane-following at higher speeds due to possibility of abrupt curves. cObstacle avoidance demonstrated at 40 km/h but not integrated with road-following or speed adjustment on unstructured roads. Note: TRL = technology readiness level; SV = stereo video; MV+R = monocular video plus radar; SFLIR = stereo forward looking infrared; MFLIR+R = monocular forward looking infrared plus radar. |
||
TABLE 4-6 TRL Estimates for Example UGV Applications: Off-Road/Cross-Country Mobility
|
Speed (km/h) |
Day |
Night and Low Visibility |
|
Terrain Classification |
||
|
40 |
TRL 4 Color video, multiband |
TRL 2 Multiband FLIR |
|
100a |
TRL 2 |
TRL 2 |
|
120 |
TRL 1 |
TRL 1 |
|
Obstacle Avoidanceb |
||
|
40 |
TRL 5 LADAR, SV, FOLPEN |
TRL 3 LADAR, SFLIR, FOLPEN |
|
100c |
TRL 3 |
TRL 3 |
|
120 |
TRL 1 |
TRL 1 |
|
aRequires macro-texture analysis, terrain reasoning to predict terrain roughness. bUses geometry alone or applies geometric criteria to objects that pass through material classification sieve. cRequires active vision. Note: TRL = technology readiness level; LADAR = laser detection and ranging; SV = stereo video; FOLPEN = foliage penetration; SFLIR = stereo forward looking infrared. |
||
TABLE 4-7 TRL Estimates for Example UGV Applications: Detection of Tactical Features
|
Examplea |
Day |
Night |
|
Donkey |
TRL 4b |
TRL 3 |
|
Wingman |
TRL 3 |
TRL 3 |
|
Hunter-Killer |
TRL 2 |
TRL 2 |
|
aDonkey: cover and concealment (natural and manmade); Wingman: cover and concealment; Hunter-Killer: cover and concealment, select observation post (OP), select ambush site and kill zone. bVery limited, tree-lines and overhangs. Note: TRL = technology readiness level. |
||
TABLE 4-8 TRL Estimates for Example UGV Applications: Situation Assessment
|
Examplea |
Day |
Night |
|
Donkey |
TRL 2 |
TRL 2 |
|
Wingman |
TRL 2 |
TRL 2 |
|
Hunter-Killer |
TRL 1 |
TRL 1 |
|
aDonkey: detect, track, and avoid other vehicles or people; Wingman: track manned “leader” vehicle, detect, track, and avoid other vehicles or people, distinguish among friendly and enemy combat vehicles, and detect unanticipated movement or activities; Hunter-Killer: detect, track, and avoid other vehicles or people, discriminate among friendly and enemy vehicles, detect unanticipated movement or activities, and detect potential human attackers in close proximity. Note: The assumption is that the focus is on a region extending from 100 meters to 1,000 meters. RSTA is assumed to start at 1,000 meters. TRL = technology readiness level. |
||
-
Situation assessment: Requires identifying and locating friendly and enemy vehicles and dismounted personnel in a region extending from 100 meters to 1,000 meters.
In addition to the task-specific variables above, perception performance will be affected by weather, levels of illumination, and natural and manmade obscurants that affect visibility.
Salient Uncertainties
The success in detecting and tracking vehicles for traffic avoidance argues for the eventual success of on-road perception-based leader-follower operation.3 Limited success in
detecting pedestrians suggests that off-road leader-follower, where the vehicle follows dismounted infantry, is also a long-term potential.
To be useful for any mission UGVs must be able to go from A to B with minimal intervention by a human operator; however, there are no quantitative standards, metrics, or procedures for evaluating UGV performance. There is uncertainty as to how much progress has been made and where deficiencies exist. For example: Is DEMO III performance improved over DEMO II? If so, by how much? For what capabilities and under what conditions? Because there is little statistically valid test data, particularly in environments designed to stress and break the system (e.g., unknown terrain, urban environments, night, and bad weather), there is considerable uncertainty as to how systems might perform in these environments. Similarly, there is no systematic process for benchmarking algorithms in a systems context and corresponding uncertainty as to where improvements are required.
The foregoing provides the basis for the answer to Task Statement Question 4.a in Box 4-1.
Recommended Research
As a high priority, the Army should develop predictive performance models and other tools for UGV autonomous
|
BOX 4-1 Task Statement Question 4.a Perception Component of “Intelligent” Perception and Control Question: What are the salient uncertainties in the “intelligent” perception and control components of the UGV technology program, and are the uncertainties technical, schedule related, or bound by resource limitations as a result of the technical nature of the task, to the extent it is possible to enunciate them? Answer: The greatest uncertainties are in describing UGV performance and in determining the effect of perception (and other subsystems) on UGV system performance. No metrics have been developed and no statistically significant data have been collected in unknown environments under stressing conditions. There are no procedures for benchmarking algorithms and hence considerable uncertainty if the algorithms are best-of-breed. In the absence of metrics and data there is little basis for system optimization and a corresponding uncertainty about performance losses due to system integration issues. There is no systematic way to determine where improvements are required and in what order. The uncertainties exist because of a lack of resources in the Army’s program. |
behavior architecture system engineering and performance optimization. This work includes:
-
Statistically valid data collection in unknown environments under stressing conditions leading to the development of predictive performance models, and
-
Development of performance metrics and algorithm benchmarking.
An equally high priority should go to development and integration of real-time algorithms for data fusion and active vision. Other important areas include development and integration of real-time algorithms for terrain classification using texture analysis and multispectral data and development and integration of algorithms for sensor management, particularly active sensors.
NAVIGATION
Navigation for UGV is a large problem domain that includes such elements as current location (both absolute and relative); directions to desired location(s) such as final destination or intermediate waypoints; aiding in situational awareness (SA) including providing the location of friendly forces and targets over a large region; the mapping of immediate surroundings, how to navigate about the immediate surroundings and how to navigate to the next waypoint or final destination; and the detection of nearby hazards to mobility. Navigation overlaps and has interrelationships with several other key areas of this study, including perception, path planning, behaviors, human–machine interface, and communications. One of the major goals of the navigation module is to aid in providing enough information to allow near-autonomous mobility for the UGV.
State of the Art
Currently GPS/INS is often used for airborne and ground vehicles to determine current location and to provide directions to desired locations. GPS/INS is a proven technology that is currently used in many applications. For GPS/ INS, the inertial navigation system (INS) provides accurate relative navigation with the normal drift of the INS corrected by the absolute position obtained by GPS. With selective availability turned off GPS provides accuracy of 10 to 20 meters. This accuracy is dependent upon the geometry of the satellites used to determine the position. Horizontal position accuracy is usually better than vertical position accuracy. Horizontal errors of only 3 to 5 meters are common. Accuracy of 1 meter or less can be obtained using differential GPS (DGPS). One relative navigation technique for a communication network is to determine the relative position of each member of the network by ranging on the network communication signals. By ranging on all or most of the communications signals of a network the topology of the members
of the network can be determined. To pin down the absolute location of this topology requires that the absolute location of some of the members of the network be determined by some other method. To provide situation awareness and information about geographical surroundings, the UGV’s current position can be tied to geographical information system (GIS) databases, such as detailed terrain maps and current situation maps. These databases can be stored on board the UGV or very recent databases can be downloaded by means of communication links. Current position information integrated with GIS databases has been used in many commercial products. Other relevant SA information including non– line of sight (NLOS) and beyond line of sight (BLOS) targets can be provided to the UGV from other team members by the communication network. Onboard sensors (i.e., perception) can also be used to detect and locate potential line-of-sight (LOS) targets and nearby friendly units.
To illustrate the current state and future needs of UGV navigation, the navigation aspects of each of the four example military applications from Chapter 2 are described separately in the following paragraphs. The first application, the Searcher, is a teleoperated UGV used to search urban environments (e.g., buildings) or tunnels. Because this UGV is teleoperated, the range from the operator to the UGV is likely to be less than 1 km, and the Searcher may even be within sight of the operator. Therefore, all navigation decisions can be made by the operator, and there is little need for any sophisticated navigation sensors onboard the Searcher. Teleoperation is currently being used successfully in several military robotic programs, including Matilda and the Standardized Robotic System (SRS).
Another UGV example application is the Donkey, an unmanned small unit logistics server. The Donkey is envisioned as being in the semiautonomous preceder/follower UGV class. The Donkey will follow electronic paths (electronic “bread crumbs”) through urban or rural terrain from a start point to a release point. Navigation along this electronic path (e.g., GPS waypoints, radio frequency tags, or defined points on an electronic map) is critical for successful performance of the Donkey. If the path were defined as GPS waypoints, latitude/longitude points, or other absolute position points then the Donkey would probably use GPS/INS (or another beacon navigation system integrated with a relative navigation system) as its main navigation system.
To move along the electronic path various techniques utilizing onboard sensors combined with navigation equipment will allow the Donkey to detect immediate hazards and to navigate around these hazards while still progressing along the path (see sections titled “Perception” and “Path Planning”). Navigation techniques for the Donkey must also consider threat capabilities. Since all navigation techniques have some vulnerabilities, multiple navigation techniques should be used in conjunction to reduce these vulnerabilities. For the Donkey, environmental conditions along the path may have changed since the path was defined. The Donkey may have to operate in areas of GPS denial (or denial of other navigation beacons), either intentional (jamming) or environmental/unintentional (urban canyon, indoors, heavy foliage). Also, communication networks may be jammed. Thus navigation may have to be performed without any outside aiding (at least for some period of time).
There is much current work being done to alleviate some of the vulnerabilities of GPS to jamming (including development of both new signals and frequencies); however, it must be assumed that GPS will always have some vulnerabilities. For some current applications the combination of GPS and INS is used to resolve this problem. If GPS were denied, navigation could be performed by “riding” the INS until GPS is restored. If the Donkey could recognize its environment (perception), it may be able to determine its position based upon comparison of external sensor data with onboard maps, utilizing its last known position. The Donkey must also be able to detect when its navigation solution is in error and exhibit the appropriate behavior when this occurs. For GPS, receiver autonomous integrity monitoring (RAIM) is one technique used to verify the validity of individual satellite signals. RAIM has requirements dictating how quickly errors must be detected and what probability of missed errors or false positives are allowable.
The third UGV example application is the Wingman, a platform-centric autonomous ground vehicle. The navigation requirements of the Wingman include the ability to navigate to designated areas without any path information supplied (drive from point A to point B) and to operate at predefined standoff positions relative to the section leader. Thus, the Wingman will have to determine its absolute position and its position relative to the section leader, and to navigate with little supervision. In some instances human interaction from the section leader may aid the Wingman in determining its navigation position. Again navigation is critical for the successful performance of this UGV. The Wingman will probably use GPS/INS (or another beacon navigation system supplemented by INS) as its main navigation system. If high-accuracy positions were needed (errors of less than 10 meters), DGPS might also be required. The Wingman’s relative position compared to the section leader can be determined by communication between the section leader and the Wingman in which each tells the other its absolute position. It may be possible for the Wingman to range off of communications signals from the section leader to aid in determining its relative position compared to the section leader. Theoretically, near-autonomous mobility (point A to point B) can be obtained by various techniques utilizing onboard sensors combined with navigation equipment to allow the UGV to detect immediate hazards and to navigate around these hazards while still progressing towards the desired location (see sections on “Perception” and “Path Planning”). Tests to date have shown that all techniques have drawbacks and near-autonomous mobility has yet to be achieved. One technique includes vision detectors utilizing
pattern recognition and neural networks to identify hazards (UGV perception of external environment). Utilization of detailed terrain maps combined with GPS/INS has also been attempted, but GPS/INS position errors along with the need to update terrain maps as rapidly fluctuating conditions warrant have been stumbling points. The vulnerabilities mentioned in the above section on the Donkey also apply to the Wingman. Because the Wingman may also have automatic, lethal, direct fire capabilities, it is even more imperative for this UGV to determine its absolute position, the relative positions of all friendly/innocent assets, and detect when its navigation position is in error.
The final UGV example application is the Hunter-Killer unit, a group of network-centric autonomous vehicles. These UGVs will be tied together through a local wireless network. Autonomy from human inputs will be greater for the Hunter-Killer than for the Wingman. The navigational criticality and capabilities for the Hunter-Killer will be very similar to the Wingman discussed above. The Hunter-Killer will also probably use GPS/INS (or another beacon navigation system combined with a relative navigation system) as its primary navigation system. Because of the communications network inherent in the Hunter-Killer, relative navigation/geolocation of individual units can be performed by ranging on these communications signals. This will help to overcome the vulnerability of GPS/INS, on which UGV depends for navigation/geolocation, because in areas of GPS denial (e.g., urban environments), the ultra wide band (UWB) network signal may remain viable. Individual units may be able to send paths to other units to aid the other units in navigating from point to point. The vulnerabilities mentioned in the above section on the Donkey also apply to the Hunter-Killer. Like the Wingman, the Hunter-Killer will also have automatic, lethal, direct fire capabilities. Therefore it is imperative for this UGV to determine its absolute position, the relative positions of all friendly/innocent assets, and detect when its navigation position is in error.
For all example applications UGV navigation will be highly dependent upon the level of autonomy required of the UGV (see section on “Perception”). The final navigation solution (for all but the teleoperated Searcher) will probably involve an integration of onboard sensor information (sensor fusion), GPS/INS (or another beacon absolute navigation system integrated with a relative navigation system), navigation integrated with communications signals, the sharing of navigation information by all relevant assets (satellites, pseudolites, UAVs, other UGVs), and some operator oversight. Navigation requirements will thus impact (and be impacted by) perception, path planning, behavior, and communication requirements.
Technology Readiness Estimates
GPS/INS is a proven navigation technology (TRL 9). Other mature forms of navigation include dead reckoning (e.g., INS) and other beacon techniques (e.g., LORAN [long-range navigation]). Relative navigation on communications signals is also mature but requirements on bandwidth and utilization of timing sources complicate the problem. Teleoperation has been shown to be viable (TRL 6) in various programs including Matilda and the SRS. The ability of various communications signals (e.g., UWB) to be viable for relative navigation when GPS is denied needs to be investigated; some work is being done in this area, and the method is probably at a TRL 4 or 5.
Perception and path-planning technologies are closely related to navigation technologies, and the fusion of navigation, perception, path planning, and communications is the key to autonomous A-to-B mobility. This fusion is also the most technically challenging area and the least technically mature. Assigning a TRL value to this fusion of navigation, perception, path planning, and communications is difficult, but a reasonable guess is TRL 1 or 2.
Salient Uncertainties
The major technology gap for beacon absolute navigation (e.g., GPS/INS) is the threat of denial of the signal. For GPS much current work is ongoing to improve GPS anti-jamming characteristics, corrections for multipath problems in urban environments, and other GPS signal-tracking improvements. Combining GPS (or any other beacon navigation) with relative navigation using communications signals will help in areas where GPS is sometimes precluded; this combination of GPS and geolocation on communications signals needs to be developed. Further integration between navigation and communications will help to create more robust positioning solutions. Perception can also be used to aid in navigation, for example, the ability to determine the angle to various landmarks for which the position is known a priori can be used to determine the current position. The integration of navigation and perception is another technology gap that needs to be filled. UGVs must be able to detect when they are lost and then exhibit the appropriate behavior. For GPS, RAIM helps to meet this requirement, but for other navigation systems this ability to detect navigation errors will have to be developed. To reach near or full autonomy, UGV navigation will require the integration of perception, path-planning, communications, and various navigation techniques. This integration of multiple systems is the largest technology gap in autonomous navigation.
One of the greatest risks for UGV navigation is the interrelationships of navigation, perception, communications, path planning, man–machine interface, behavior, and the level of autonomy of the UGV. Decreased performance in any one of these areas implies greater emphasis on one or all other areas. For example, an inability of perception to delineate obstacles requires that navigation may have to rely more upon GPS/INS and maps or upon the man–machine interface (teleoperation or semiautonomy), either of which imply
a greater reliance upon communications. The interrelationship between these disparate areas must be recognized and planned from the start of the program.
Because no one navigation solution meets all conditions, several navigation techniques must be included in any UGV design. Probably both an absolute and a relative navigation technique will be necessary. The selection of which navigation techniques to utilize will be requirements driven. The four military applications presented in Chapter 2 are a good start toward defining the problem. Requirements that have to be pinned down include:
-
Do we expect to be in an area of GPS denial?
-
Do we expect operators to always be able to communicate to UGVs?
-
Is the operator–UGV communication real-time?
-
Is relative position to other assets as important as absolute position?
-
Is relative position “good enough” for most assets?
-
How long can the UGV be expected to operate without an updated absolute navigation position?
-
What are the mission goals?
-
What is the expected behavior of the UGV when it is lost?
-
What navigation failure rate or position error is tolerable?
Note that these requirements can be modified as the program progresses but a first cut at these requirements is necessary to bound the navigation problem. If initial requirements are not defined, program risk grows greatly. The possible military applications presented in previous sections are a good first step in defining initial requirements.
Full autonomous navigation for all conditions is probably not feasible, especially in the near future. Therefore, requirements for the man–machine interface for operator aiding need to be included in all future programs. How the UGV recognizes that it is lost and what the behavior should be when the UGV knows it is lost needs to be defined. The FCS program should define semiautonomous navigation capabilities at different levels of operator control. As navigation improves operator control can be lessened but at each stage of development a viable product is produced. Note that the progression of the possible military applications from the Searcher through to the Hunter-Killer is an evolution from no autonomous navigation through semiautonomous navigation all the way to full autonomous navigation.
The foregoing provides the basis for the answer to Task Statement Question 4.a as it pertains to the navigation component of “intelligent” perception and control. See Box 4-2.
Recommended Areas of R&D
Currently there is much ongoing research to improve GPS anti-jamming characteristics, corrections for multipath
|
BOX 4-2 Task Statement Question 4.a Navigation Component of “Intelligent” Perception and Control Question: What are the salient uncertainties in the “intelligent” perception and control components of the UGV technology program, and are the uncertainties technical, schedule related, or bound by resource limitations as a result of the technical nature of the task to the extent it is possible to enunciate them? Answer: Further integration between navigation and communication will help to create more robust positioning solutions. UGVs must be able to detect when they are lost and then react appropriately. The ability to detect navigation errors will have to be developed. To reach near or full autonomy, UGV navigation will require the integration of perception, path planning, communication, and various navigation techniques. This integration of multiple systems is the largest technology gap in autonomous navigation. These uncertainties are bound by resource limitations and result from the technical nature of the task. |
problems in urban environments, and other GPS signal-tracking improvements. UGV navigation should be able to “ride the coat-tails” of these efforts to obtain the best GPS navigation solutions. Research and development should be done in the following areas to yield the desired autonomous navigation solutions for all possible environmental conditions:
-
Relative navigation utilizing communications signals (especially ultra-wide band signals due to their ubiquitous characteristics) integrated with GPS.
-
Improved integration of GPS (or any absolute navigation position) with accurate digitized maps to aid in point-to-point mobility and perception.
-
Integration of perception with accurate maps to allow UGV to determine its position by comparison of sensor input and with map information.
-
Integration of absolute navigation system (i.e., GPS) with sensor information (perception) and map information to determine a more accurate position.
-
Utilization or development of improved active beacons that are viable in urban, heavy foliage environments, or jammed environments (e.g., pseudolites, beacon signals for indoor navigation).
-
Development of error detection techniques for any navigation system chosen for UGV navigation.
-
Development of UGV behavior when the UGV detects that it is lost in order for the UGV to recover its position.
-
Integration of absolute navigation techniques (e.g., GPS, LORAN), relative navigation techniques (INS, dead-reckoning, relative position estimates based upon ranging on communication signals), position estimates based upon perception, information received from other assets (including UAVs, pseudolites), and path-planning information. This is a large research area and probably the most important research area for UGV navigation. The absolute and relative navigation techniques chosen are interrelated with other system requirements, including perception, communications, power, stealth (i.e., is the UGV entirely passive), available computer power, and path planning. Various combinations of these navigation techniques and other position estimation methods should be integrated and evaluated. Note that the interrelationships of navigation, path planning, perception, and communication must be evaluated at a system level.
Impact on Logistics
The use of any beacon navigation system will require the installation of the navigation beacons. Even for GPS it may be necessary to set up pseudolites or utilize airborne pseudolites.
The electronic path will have to be determined and disseminated before a Donkey UGV can be utilized. Maps may have to be generated and disseminated to aid in navigation for the Donkey, Wingman, and Hunter-Killer. These maps will have to be as recent as possible and may have to contain much SA information.
Communications to support navigation inputs will have to be set up for the Hunter-Killer and possibly for the Wingman. These same resources may also be needed to support communications with other assets in the area of operations.
PLANNING
This section defines the scope of the planning technology area. It describes the mid- and far-term state of the art, and identifies the impact, if any, on Army operations or logistics. Planning for Army UGV systems encompasses software for path planning, which interacts with both perception and navigation, and mission planning.
Path Planning
Path planning is the process of generating a motion trajectory from a specified starting position to a goal position while avoiding obstacles in the environment. The input to a path-planning algorithm is a geometric map of the environment (and possibly the material composition of the environment in more advanced path planners), where positive and negative obstacles have been identified, and the starting and goal points are given. The output of the path-planning algorithm is a set of waypoints that specify the trajectory the vehicle must follow. For a completely known environment, path planning need only be performed once before the motion begins. However, the environment is often only partially known, and as obstacles are discovered they must be entered into the map and the path must be replanned.
State of the Art
Academic. Research in planning robotic motion dates back to the late 1960s, when computer-controlled robots were first being developed. Most advances were made in the 1980s and 1990s as computers became readily available and inexpensive. An excellent reference that summarizes many of these algorithms is Latombe (1991).
The notion of configuration space is commonly used to represent obstacles in the robot’s environment (Lozano-Perez, 1983). Configuration space for a mobile robotic vehicle is typically a two- or three-dimensional space representing the x and y position and possibly the orientation in the x–y plane. The vehicle and obstacles are simplified in shape to polygons, and the vehicle itself is further simplified to a point by “growing” the obstacles by the vehicle silhouette.
As described in Latombe (1991), there are three computational approaches to path (or motion) planning. The first is a roadmap approach where regions of free space are linked together by a network of one-dimensional curves. Once a roadmap is constructed, path planning is reduced to searching for roads that connect the initial starting point to an ending point.
The second approach involves decomposing the free space into nonoverlapping regions called cells. This cell decomposition may be exact or approximated by a prespecified geometric shape, typically a square. A connectivity graph represents the adjacency relation among the cells. The graph is searched to determine a sequence of cells that link the starting position to the goal position.
The third approach is a potential field method where the direction and speed of motion are specified by the gradient of a potential field function that is minimized when the vehicle reaches the goal point. Obstacles are avoided by adding in repulsive terms that move the vehicle away from the obstacles. The potential fields algorithm is computationally efficient and easy to implement in real time. As obstacles are discovered, repulsive vectors are easily added. One disadvantage of a potential field algorithm is that it is possible for the local minimum to occur and for the resultant gradient vector to be zero before the vehicle reaches the goal. Another disadvantage is that potential fields may also cause instability (i.e., oscillatory motion) at higher speeds (Koren and Borenstein, 1991). In these cases the first two approaches must be used to drive the vehicle away from the local minimum.
From the systems perspective, path-planning tools depend to a great extent on the quality of the perception and map-building tools. Recent perception advances in the area of simultaneous localization and mapping (SLAM) (Thrun et al., 1998; Choset and Nagatani, 2001; and Dissanayake et al., 2001) will greatly benefit path planning. This technology is potentially very useful for the Army’s UGV program, as it allows a vehicle to estimate where it is located as well as build a map of the environment. DARPA has funded much of the work found in Thrun et al. (1998) through its Tactical Mobile Robotics program.
Commercial. Many of the commercial robot simulation packages such as Simstation and RoboCad contain general six-degrees-of-freedom path planners for industrial robot manipulators. They are used to plan the free space motion of the manipulator in a cluttered factory environment. Some of the commercial mobile robotic vehicles by companies, such as the i-Robot Corporation, contain a simple two-dimensional path planner that is specific for their vehicles. There are no general purpose path planners for UGVs on the commercial market.
Current Army Capabilities. The Demo III experimental unmanned vehicle (XUV) contains an advanced and sophisticated path planner that combines world modeling, optimization, and computational searching algorithms. Planning is performed at several levels based on the time horizon (e.g., 500-ms, 5-s, 1-min, and 10-min plans) and the spatial resolution (0.4-meter, 4-meter, and 30-meter grid spacings). Path segments are weighted based on path length, offset from reference path, detected obstacles, terrain slope, and so on. The segments are stored in a graph and Dijkstra’s algorithm is used to search the graph for the optimal solution. In addition to shortest-path-length plans the planner can also compute road-only paths, and tree line tracking, low-visibility paths. Updating the vehicle path is currently performed at 4 Hz using a 300-MHz Motorola G3 processor.
The success of path planning generally depends on reliable sensor measurements. There are path planners that take uncertainty in sensor measurements into account, but even these planners perform poorly if the sensor measurements are outside assumed statistical limits (Thrun et al., 1998; Choset and Nagatani, 2001; Dissanayake et al., 2001). Although specific details were not given at Demo III, the National Institute of Standards and Technology (NIST) developers of the path planner appear to use a recursive estimator such as a Kalman or Information Filter to improve estimates of the vehicle’s current location and its surrounding obstacles. The new LADAR system on the Demo III XUV vehicle is certainly a big improvement over previous systems using stereo-video alone. The LADAR system is able to detect obstacles regardless of their contrast in the environment. The inertial navigation unit in the Demo III XUV greatly aids in localization of the vehicle in the environment.
Technology Readiness
Path planning for an individual UGV is relatively mature, but mission planning and multiple UGV and UAV planning are relatively immature. Path-planning technology is highly dependent upon both Perception and Navigation technologies for success. As demonstrated in Demo III, the state of the art in path planning for an individual UGV, such as the Donkey and Wingman examples, is estimated at TRL 5, because of limited testing in relevant environments.
The technology readiness level of multiple UGV and UAV path planning is currently TRL 3 for multiple UGVs and TRL 1 for multiple UGVs and UAVs. Under DARPA’s Tactical Mobile Robotics program, path planning for multiple UGVs was demonstrated in Feddema et al. (1999) for six “bread-box-sized” robotic vehicles; in the DARPA PerceptOR program path planning for a combined UAV and UGV has just recently been simulated.
When planning the path of multiple unmanned systems, such as would be the case for the Hunter-Killer example, the communications bandwidth between vehicles is a very important factor. The less communications bandwidth there is, the less coordination between vehicles. Available communications bandwidth also depends on the mission, with more covert missions having less bandwidth. Trade studies need to be performed to determine how much bandwidth is available for each mission. Once this is determined it is possible to develop the appropriate path planners for multiple coordinated vehicles. The budget requirements necessary to bring path planning for multiple UGVs and UAVs up to a TRL 6 is substantially more than for the mission planning aids, and the time horizon could be 10 to 15 years away.
Salient Uncertainties
Algorithm development for multiple vehicle path planners is a relatively low-risk but time-consuming effort. Path planning is a software technology that will most likely be upgraded as perception sensors and mobility platforms are upgraded. As with any software in critical systems, the software must go through a stringent, structured design review, and all branches of the code must be thoroughly tested and validated before being installed. Most planning efforts for robots are in the area of path planning. The major gaps with which the Army should be concerned are in the mission-planning area as discussed below.
Recommended Areas of Research
The following are recommended areas of research and development:
-
The trade-off in computational space and time complexity for multiresolution map generation needs to be further evaluated.
-
Planning for sensor acquisition based on mapping and localization requirements should be evaluated.
-
A hierarchy of path-planning algorithms should be employed. The fastest, most efficient algorithms should be used whenever possible. If these algorithms fail, more sophisticated algorithms should be used. This should provide for graceful degradation of performance (e.g., loss of speed).
-
Most UGV path planning to date has used only geometric and kinematic reasoning. An important next step is to include models of vehicle dynamics, terrain compliance, and dynamics of vehicle and terrain interaction into future planners. Dynamic programming techniques have been successfully applied to trajectory planning of rockets (Dohrmann et al., 1996), and they may also be successfully applied here.
-
The weights used to determine the optimal path are heuristically defined by the developer. Much experimentation is necessary to determine the appropriate weights for all variations in terrain and weather.
-
Simultaneous planning for multiple UGVs and UAVs is still in its infancy. Although not demonstrated for the committee, the Demo III software was capable of controlling up to four UGVs simultaneously. The planning for these vehicles was performed independently with the operator specifying phase transition points to coordinate the vehicles at key locations. In the future a more advanced planner will be needed to control the positions of tens of UGVs and UAVs without having to plan each path individually. This capability may not be needed for initial deployment of UGVs, but it will certainly be needed to meet FCS objectives.
Mission Planning
This section defines the scope of autonomous mission-planning technology. It describes the state of the art and estimates the levels of technology readiness.
Definition
From a military perspective, autonomous mission planning goes well beyond path planning. It is the ability of the autonomous UGV to determine its best course of military action, considering synergistically the mission being supported by the UGV; enemy situation and capabilities; terrain, features, obstacles, and weather conditions; the UGV’s own and friendly force situation and vulnerabilities; noncombatant information; time available; knowledge of military operations and procedures; and unique needs of the integrated mission package. All but the last few items directly support the development of a warfighter’s situational awareness.
The military knowledge base includes tactics, techniques, and procedures as defined in tactical fighting documents and standard operating procedures; and information from unit operations orders, including friendly force structure, detailed mission execution instructions, control graphics, enemy information, logistics (e.g., when and where to refuel), priority for supporting fires, and special instructions. The special instructions can include rules of engagement, communications protocols, and information needed about the enemy.
With enhanced military SA, understanding of its mission, and knowledge of military operations, the UGV can execute its specific mission tasks. To support this execution the UGV will identify individual and unit maneuver needs, covered and concealed routes and battle positions, tactically significant observation and firing positions for both itself and the enemy, and what and when to report and engage.
Assuming the appropriate information is available, the critical technologies needed to provide the above capabilities are software; highly efficient processing capability; and rapid-access, high-capacity, low-power storage devices for real-time cognitive processes.
State of the Art
Mission-planning capabilities for robots are very immature. Most research in the perception and planning areas is focused on path planning, with little to no efforts in mission planning. Little work is being done to develop the cognitive algorithms and knowledge bases needed to support autonomous mission planning (Meyrowitz and Schultz, 2002; U.S. Army, 2001). Most mission-planning technology efforts are in the area of developing mission-planning aids for humans using command and control systems. The only autonomous mission planning appears to be in modeling and simulation technology development efforts in support of developing more realistic decision-making capabilities within simulations (Toth, 2002).
Much work has begun in the area of cognitive modeling. Cognitive models based on neural networks, Bayesian networks, case reasoning, and others are being considered for supporting the decision-making capabilities of synthetic entities. These modeling and simulation efforts could be leveraged by robotic development programs. The Army and Navy have recently begun to exploit this opportunity (U.S. Army, 2002; Toth, 2002).
Needs of Example UGV Systems
The mission-planning needs of the four notional applications vary significantly. The basic Searcher and Donkey will not require mission-planning capabilities. The human lead will plan most of the mission for the Wingman; however, the Wingman will need some mission-planning capability to react to changes in mission while on the move. The Hunter-Killer team will require very complex autonomous
mission-planning capabilities. More advanced versions of the first three applications would require mission-planning capabilities of varying levels of complexity.
Execution of the missions will vary. The teleoperator will execute most of the Searcher’s mission. The Donkey mostly will follow its leader’s execution of the mission. The Wingman and Hunter-Killer team execute most of their missions on their own. Various aspects of the example missions will be executed by specific software developed for tactical behaviors and cooperative behaviors as discussed in the section on Behaviors and Skills.
Technology Readiness Estimate
While the mission planning in Demo III was very good (possibly TRL 5), it was very limited in the number and scope of RSTA mission functions attempted. Much more complete mission- and path-planning algorithms will be required for such missions as counter-sniper, indirect fire, physical security, logistics delivery, explosive ordnance disposal, and military operations in urban terrain (MOUT). Mission-planning aids for human command and control of each of these missions could be brought up to TRL 6 in a few years with moderate funding.
Autonomous mission-planning technologies that would be needed for Wingman and Hunter-Killer systems are at TRL 3. TRL 6 may not be achieved for another 10 years.
Salient Uncertainties
The largest capability gap is in mission planning that is specific to the Army doctrine. This is a chicken-and-egg problem in that the use of robot vehicles is not defined in the Army doctrine, and therefore the doctrine will also have to be developed. Computer scientists and soldiers need to work together to understand the capabilities of UGVs and the needs of the soldier. The soldiers will write the doctrine, while the computer scientists will develop the mission-planning tools.
Automated mission planning is being addressed in the modeling and simulation community, but capabilities are still very immature. Advances are being made in software; highly efficient processing capability; rapid-access, high-capacity, low-power storage devices for real-time cognitive processes; local or distributed high-fidelity knowledge bases; high bandwidth, mobile communications networks; perception technologies; mobility systems for complex terrain, and natural language and gesture recognition technologies that understand military language and gestures. However, these advances are not being integrated into a mission planning technology for robot systems.
Feasibility and Risks
Near-term success in autonomous mission planning does not seem feasible. Modeling and simulation has not had the success in modeling decision making within simulations that was anticipated. Within DOD there has been a change in thrust in human behavior representation efforts. This will greatly impact the development of mission-planning capabilities of synthetic entities. The reason for this change is that past efforts seem to have reached a plateau, with the belief that adding another million lines of code to these past efforts would not get human behavior representations any closer to the simulation needs of the warfighter (Numrich, 2002; Toth, 2002). It is not known how difficult it will be to transfer successful modeling and simulation efforts to a UGV program.
Areas of R&D
The Demo III system demonstrated several preliminary mission-planning capabilities for the scout (RSTA) mission. These will need to be enhanced and other missions added as the operational requirements for FCS demand.
The UGV community should work closely with the modeling and simulation community to leverage algorithms and benefit from lessons learned. The Army should focus on developing cognitive models and knowledge bases for support of mission-planning capabilities.
Salient Uncertainties in Planning
Autonomous path and mission-planning technologies will require highly skilled personnel to develop the knowledge base and for configuration management and maintenance of mission-planning subsystems.
The foregoing assessment of path- and mission-planning technologies provide the basis for answering Task Statement Question 4.a as it applies to the Planning component of “intelligent” perception and control. See Box 4-3.
BEHAVIORS AND SKILLS
Behaviors and skills software combines the inputs from perception, navigation, and planning and translates them into motor commands. Specific effector behaviors depend upon the particular mission equipment installed on the UGV and will vary with the operational requirements.
A behavior is coupling of sensing and acting into a prototype, observable pattern of action. It can be innate, learned, or strictly a stimulus response (e.g., ducking when something is thrown at you). A skill is a collection of behaviors needed to follow a plan or accomplish a complex task (e.g., riding a bicycle). This section is concerned with behaviors and skills that enable tactical responses, including survival and goal-oriented behaviors, as well as behaviors specific to combat tactics.
Tactical behaviors, especially those associated with military skills, are essential to enable the UGV to perform in a battlefield environment. Another area, cooperative behaviors, will enable UGVs to accomplish missions involving
|
BOX 4-3 Task Statement Question 4.a Planning Component of “Intelligent” Perception and Control Question: What are the salient uncertainties in the “intelligent” perception and control components of the UGV technology program, and are the uncertainties technical, schedule related, or bound by resource limitations as a result of the technical nature of the task to the extent it is possible to enunciate them? Answer: Algorithm developments for mission planning and for multiple UGV and UAV path planning are relatively immature. When planning the path of multiple UGVs and UAVs, the communications bandwidth between vehicles is a very important factor. Trade studies need to be performed to determine how much bandwidth is available and how the requirements will vary for specific missions. Once this is determined, it is possible to develop the appropriate path planners for multiple coordinated vehicles. The budget requirements necessary to bring path planning and automated mission planners for multiple UGVs and UAVs up to a TRL 6 is substantially more than for single mission planners, and the time horizon could be 10 to 15 years away. These uncertainties are bound by resource limitations and result from the technical nature of the task. |
other unmanned systems, including UAVs. Both of these areas are discussed in the context of the four example systems postulated in Chapter 2.
Tactical Behaviors
This section defines the scope of tactical behavior technology. It describes the state of the art, estimates technology readiness, and discusses capability gaps.
Definition
The term “tactical” has double meanings for military robots. For commercial robots tactical behaviors include software to perform and control mission functions, such as manipulating tools or sensors. For military UGVs the definitions must be expanded to include behaviors based on military protocols used in tactical combat.
Tactical behaviors may need to be modified by the mission or by the influence of cultural, political, or economic concerns. They affect how UGVs will maneuver, engage, communicate, take evasive actions, and learn. Most of these behaviors are defined by skills and tasks identified in fighting manuals, Army Readiness Training Evaluation Program (ARTEP) tasks, standard operating procedures (SOPs), and so on. Several of these skills and tasks are discussed below.
Tactical maneuver includes movements both as an individual UGV and as part of a unit formation. With access to detailed terrain and feature information and friendly or enemy situations, individual movement behaviors include using folds in terrain and thick vegetation for cover and concealment, gaining and maintaining contact with an enemy entity without being detected, and occupying static positions that provide optimal line of sight for communications or for engaging the enemy. UGV tasks as a member or members of a maneuvering unit include moving in an appropriate position, at a particular distance, and with a specific mission package orientation with respect to other entities in the formation. Both the Wingman and Hunter-Killer examples depend upon such military tactical maneuver skills.
For UGVs equipped with or access to weapons or linked to weapons effects, tactical behaviors must include targeting, engaging, and assessing damage. Engagements can be accomplished with onboard weapons, perhaps including nonlethal weapons, or with munitions on other ground, air, or sea weapons, or soldier platforms. Battle damage assessments determine whether the target is still a threat to the UGV or other friendly forces. Targeting includes finding, identifying, and handing off targets. An engagement skill required by the Wingman UGV, for example, would be to draw lethal fire away from accompanying manned platforms.
The UGV must know when and how to communicate. It must know when to report crossing control measures, enemy contact, and chemical alerts. It must also know how to request orders and supporting fires. For the Wingman and Hunter-Killer, communicating includes cooperating or collaborating on teams of UGVs, or UGVs and humans, as well as interfacing with personnel outside its organization. It must be able to coordinate or facilitate operations with other friendly forces by radio and through natural language and gestures.
Physical security is another consideration. Tactical evasive actions primarily relate to actions that support self-preservation from enemy personnel, enemy weapons, and natural dangers. Survivability techniques include changing battle positions, dashing from one point to another, hiding, firing, and calling for additional support. The usefulness of a UGV to the enemy can be significantly reduced by the ability of the friendly force to command the UGV even while the system is under enemy control. If captured, a UGV might not hesitate to call in artillery on itself. To ensure that the UGV does not become a Trojan horse the enemy would need to render it practically useless. If cornered and faced with imminent destruction, it is possible that an appropriate tactical behavior for a robot might be to self-destruct.
The UGV must also know how to protect itself from natural dangers like precipitation, heat, water obstacles, and steep drops (negative obstacles). It has to know when it can navigate over, through, and around and estimate compliancy of an obstacle. Finally, it must know what actions to take when it is low on ammunition, fuel, oil, energy, or platform states (upside down, track thrown) warrant assistance.
The UGV must also know how to react to noncombatants and potential militant forces. It must abide by rules of engagement. It should be able to communicate with or at least make announcements to civilians in the local language.
A critical tactical behavior capability is for the UGV to know how its actions impact the plan or the commander’s intent; when to call for assistance; when to override or update behavior; and when is the appropriate time to engage or disengage its behaviors. Finally, the UGV must be able to learn by adjusting its knowledge base of tactical behaviors as it experiences repeatable enemy actions or other learning events.
The military knowledge base needed to support these behaviors is similar to those needed for mission planning, including tactics, techniques and procedures as defined in tactical fighting documents and SOPs; and information from unit operations orders, including friendly force structure, detailed mission execution instructions, control graphics, enemy information, logistics (e.g., when and where to refuel), priority for supporting fires, and special instructions. The special instructions can include rules of engagement, communications protocols, and lists of needed information about the enemy.
The mobility platform and mission equipment are critical supporting technologies for the performance of tactical behaviors. Other technologies for supporting tactical behaviors include stealth technologies and human–robot interface technologies, especially natural language and gesture recognition and transmission of English and foreign languages. This means that the development of tactical behaviors must be coordinated and synchronized with development of these supporting technologies.
State of the Art
Tactical behavior capabilities for robots are very immature. There appears to be little being done in the area of tactical behaviors. Little work is being done to develop the cognitive algorithms and knowledge bases needed to support autonomous tactical behavior (U.S. Army, 2001; Meyrowitz and Schultz, 2002). Most UGV efforts in developing tactical behaviors appear to be in self-preservation actions. The larger set of tactical behaviors is being addressed in modeling and simulation technology development efforts in support of developing more realistic behaviors of entities within simulations (Toth, 2002). Much work has begun in the area of cognitive modeling. Cognitive models based on neural networks, Bayesian networks, case-based reasoning, and others are being considered for supporting the decision-making capabilities of synthetic entities. These modeling and simulation efforts could be leveraged by robotic development programs. The Army and Navy have recently begun to exploit this opportunity (U.S. Army, 2002; Toth, 2002). Army UGV tactical behavior programs should also leverage work on past mobile minefield efforts and DARPA’s Tactical Mobile Robotics program.
Technology Readiness
The need for tactical behavior software varies significantly for the applications of the four example systems. The basic Searcher has no requirement, but Donkey will need to move in a way that minimizes the chance for detection by the enemy. Wingman and Hunter-Killer will require active behaviors as nonlethal self-protection, avoiding enemy observation, and fleeing and hiding. The human lead will control or execute most of the tactical behaviors of the Searcher and Donkey. The Wingman and Hunter-Killer team will both require the essential military tactical behavior capabilities described in this section, with those needed by the Hunter-Killer being much more complex. Advanced versions of all applications would require tactical behaviors of increased complexity.
Simple evasive actions will reach TRL 6 in the near term. Self-preservation actions, like avoiding enemy detection, should reach TRL 6 in 3 to 5 years. Complex tactical behaviors are at TRL 3, and TRL 6 may not be achieved for another 10 years.
Salient Uncertainties
Most tactical behaviors development efforts are focused on self-preservation. As stated earlier, tactical behaviors are being addressed in the modeling and simulation community, but capabilities are still very immature. Advances are being made in software; highly efficient processing capability; and rapid-access, high-capacity, and low-power storage devices for real-time cognitive processes. However, these advances are not being integrated into tactical behavior technologies for UGV systems.
Near-term success in autonomous, complex tactical behaviors does not seem feasible. The feasibility and risks described in the mission-planning section hold true for tactical behavior technology. Additionally, mobility for UGVs that requires near-human capabilities to negotiate complex terrain is at very high risk. Stealth technologies are also at high risk.
The foregoing provides the basis for the answer to Task Statement Question 4.b as it pertains to tactical behaviors. See Box 4-4.
Recommended Areas of R&D
As with mission-planning technology, the committee recommends that the UGV community work closely with the modeling and simulation community to leverage algorithms and benefit from lessons learned. UGV efforts should focus on developing the cognitive models and knowledge bases for supporting tactical behaviors as they are defined.
|
BOX 4-4 Task Statement Question 4.b Tactical Behaviors Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: Near-term success in developing autonomous, complex tactical behaviors does not seem feasible. The feasibility and risks described for mission planning also hold true for tactical behavior technology. Additionally, the aspects of A-to-B mobility that require near-human capabilities to negotiate complex terrain are at very high risk. Stealth technologies for UGVs are also at high risk. |
Cooperative Robot Behaviors
This section defines the scope of the cooperative behaviors technology area. It describes the state of the art, estimates technology readiness, and identifies the impact on Army operations or logistics.
Definition of Cooperative Behaviors
In the field of psychology the word “behavior” is defined as “the aggregate of observable responses of an organism to internal and external stimuli.” In robotics, behavior is often used to describe the observable response of a single robot vehicle to internal and external stimuli. When multiple vehicles are involved, the terminology “cooperative behavior” is often used to describe the response of the group of vehicles to internal and external stimuli.
State of the Art
Academic. In recent years there has been considerable interest in the control of multiple cooperative robotic vehicles, the vision being that multiple robotic vehicles can perform tasks faster and more efficiently than a single vehicle. This is best illustrated in a search-and-rescue mission when multiple robotic vehicles would spread out and search for a missing aircraft. During the search the vehicles share information about their current location and the areas that they have already visited. If one vehicle’s sensor detects a strong signal indicting the presence of the missing aircraft, it may tell the other vehicles to concentrate their efforts in a particular area.
Other types of cooperative tasks range from moving large objects (Kosuge et al., 1998) to troop hunting behaviors (Yamaguchi and Burdick, 1998). Conceptually, large groups of mobile vehicles outfitted with sensors should be able to automatically perform military tasks like formation-following, localization of chemical sources, de-mining, target assignments, autonomous driving, perimeter control, surveillance, and search-and-rescue missions (Noreils, 1992; Hougen et al., 2000; Brumitt and Hebert, 1998; Kaga et al., 2000). Simulation and experiments have shown that by sharing concurrent sensory information, the group can better estimate the shape of a chemical plume and therefore localize its source (Hurtado et al., 1998). Similarly, for a search-and-rescue operation a moving target is more easily found using an organized team (Jennings et al., 1997; Goldsmith et al., 1998).
In the field of distributed mobile robot systems much research has been performed, and summaries are given in Cao et al. (1995) and Parker (2000). The strategies of cooperation encompass theories from such diverse disciplines as artificial intelligence, game theory and economics, theoretical biology, distributed computing and control, animal etiology, and artificial life.
Much of the early work focused on animal-like cooperative behavior. Arkin (1992) studied an approach to “cooperation without communication” for multiple mobile robots that are to forage and retrieve objects in a hostile environment. This behavioral approach was extended in Balch and Arkin (1998) to perform formation control of multiple robot teams. Motor schemas such as avoid static obstacle, avoid robot, move to goal, and maintain formation were combined by an arbiter to maintain the formation while driving the vehicles to their destination. Each motor schema contained parameters such as an attractive or repulsive gain value, a sphere of influence, and a minimum range that were selected by the designer. “When inter-robot communication is required, the robots transmit their current position in world coordinates with updates as rapidly as required for the given formation speed and environmental conditions” (Balch and Arkin, 1998).
Kube and Zhang (1994) also considered decentralized robots performing tasks “without explicit communication.” Much of their study examined comparisons of behaviors of social insects, such as ants and bees. They considered a box-pushing task and utilized a subsumption approach (Brooks and Flynn, 1989; Brooks, 1986), as well as ALN (adaptive logic networks). Similar studies using analogs to animal behavior can be found in Fukuda et al. (1999). Noreils (1993) dealt with robots that were not necessarily homogeneous. His architecture consisted of three levels: functional level, control level, and planner level. The planner level was the high-level decision maker. Most of these works do not include a formal development of the system controls from a stability point of view. Many of the schemes, such as the subsumption approach, rely on stable controls at a lower level while providing coordination at a higher level.
More recently researchers have begun to take a system controls perspective and analyze the stability of multiple vehicles when driving in formations. Chen and Luh (1994)
examined decentralized control laws that drove a set of holonomic mobile robots into a circular formation. A conservative stability requirement for the sample period is given in terms of the damping ratio and the undamped natural frequency of the system. Similarly, Yamaguchi studied line formations (Yamaguchi and Arai, 1994) and general formations (Yamaguchi and Burdick, 1998) of nonholonomic vehicles, as did Yoshida et al. (1994). Decentralized control laws using a potential field approach to guide vehicles away from obstacles can be found in Molnar and Starke (2000); and Schneider et al. (2000). In these studies, only continuous time analyses have been performed, assuming that the relative position between vehicles and obstacles can be measured at all times.
Another way of analyzing stability is to investigate the convergence of a distributed algorithm. Beni and Liang (1996) prove the convergence of a linear swarm of asynchronous distributed autonomous agents into a synchronously achievable configuration. The linear swarm is modeled as a set of linear equations that are solved iteratively. Their formulation is best applied to resource allocation problems that can be described by linear equations. Liu et al. (2001) provide conditions for convergence of an asynchronous swarm in which swarm cohesiveness is the stability property under study. Their paper assumes position information is passed between nearest neighbors only and proximity sensors prevent collisions.
Also of importance is the recent research combining graph theory with decentralized controls. Most cooperative mobile robot vehicles have wireless communications, and simulations have shown that a wireless network of mobile robots can be modeled as an undirected graph (Winfield, 2000). These same graphs can be used to control a formation. Desai et al. (1998, 2001) used directed graph theory to control a team of robots navigating terrain with obstacles while maintaining a desired formation and changing formations when needed. When changing formations, the transition matrix between the current adjacency matrix and all possible control graphs are evaluated. In the next section the reader will notice that graph theory is also used in this paper to evaluate the controllability and observability of the system.
Other methods for controlling a group of vehicles range from distributed autonomy (Fukuda et al., 1998) to intelligent squad control and general purpose cooperative mission planning (Brumitt and Stentz, 1998). In addition, satisfaction propagation is proposed in Simonin et al. (2000) to contribute to adaptive cooperation of mobile distributed vehicles. The decentralized localization problem is examined by Roumeliotis and Bekey (2000) and Bozorg et al. (1998) through the use of distributed Kalman filters. Uchibe et al. (1998) use canonical variate analysis (CVA) for this same problem.
Feddema and Schoenwald (2001) discussed models of cooperation and how they relate to the input and output reachability and structural observability and controllability of the entire system. Whereas decentralized control research in the past has concentrated on using decentralized controllers to partition complex physically interconnected systems, this work uses decentralized methods to connect otherwise independent nontouching robotic vehicles so that they behave in a stable, coordinated fashion. These methods allow the system designer to determine the required sampling periods for communication and control and the theoretical limits on the interaction gains between each vehicle. Both continuous time and discrete time examples are given with stability regions defined for up to 10,000 vehicles. The results of this stability analysis have been applied to several missions: formation control, robotic perimeter surveillance, facility reconnaissance, and a self-healing minefield. Figures 4-4, 4-5, and 4-6 show the types of user interfaces used to control a formation, guard a perimeter, and surround a facility (Feddema et al., 1999).
Automated Highway Systems. The University of California Partners for Advanced Transit and Highways (PATH) program has been developing concepts and technologies for cooperative control of automated highway vehicles since 1990. Cooperation between vehicle and roadway systems and between individual vehicles has been emphasized in this research in order to enable higher performance of the vehicle control systems and to reduce their vulnerability to sensor imperfections. Protocols have been designed for vehicle– vehicle cooperative maneuvering (Hsu et al., 1991), and experimental implementations on passenger cars have demonstrated the improvements that can be achieved in vehicle-following accuracy and ride quality when vehicles share their state information over a wireless communications link rather than relying only on autonomous sensing (Rajamani and Shladover, 2001).
Military. The Demo II and III projects demonstrated a simple follow-the-leader cooperative behavior where the lead vehicle records GPS waypoints as it moves to a goal, and then transmits the GPS waypoints to the following vehicle, which then traverses the same path. The follower vehicle uses its own local perception sensor data to keep the vehicle on the road while following the GPS waypoints. The follower ATD STO project is extending this capability to meet more difficult requirements in terms of separation distance, delayed travel time, speed, and difficulty in terrain. The follower vehicle is to follow the path of the lead vehicle up to 200 kilometers and 24 hours later. Maximum speeds are to increase to 65 km/h on a primary road and 30 km/h over rough terrain.
Ideally the follower vehicle should be able to tolerate GPS drop-outs or jamming. The proposed schemes for navigation in the case of GPS drop-outs include using hand- or vehicle-emplaced transponder beacons or stored images at waypoints to guide the vehicle. The transponder beacon ap-
FIGURE 4-4 User interface for controlling a formation of robot vehicles. On the left the current vehicle locations are displayed on an aerial photograph. On the right the user may drag and drop vehicle icons to arrange in any desired formation. SOURCE: Feddema et al. (2002). © 2002 IEEE.
pears to be a technically feasible approach assuming that the enemy does not find and remove the beacons. The stored-images approach is attractive because the enemy does not know what the “bread crumb” image looks like and thus it is more difficult to foil. Unfortunately the approach may be technically impossible given the current limitation of machine vision. The perspective view of a camera changes considerably with orientation. A rock or tree when viewed from one angle looks completely different from a rock or tree when viewed from another angle. The camera images will not be sufficient in an environment lacking distinctive features, such as the desert, where all plants look the same, or the forest, where all trees look the same.
The success of the follower will depend on several factors including: the presence of GPS (or beacons) and obstacles, the level of object recognition, and the weather conditions. Little is known about how such factors might affect the success of a follower mission. A chart similar to Figure 4-7 would help the Army to understand how such conditions might affect the leader-follower concept.
Technology Readiness
The technology readiness level of basic leader-follower cooperative behavior, such as might be exhibited by the Donkey and Wingman examples, is already TRL 6, but cooperative robot behavior, such as needed by the Hunter-Killer is still in a state of infancy. This is currently an area of much research and is no more than TRL 2 or 3. Although some simple cooperative control strategies have been demonstrated at universities and at the national laboratories, a basic understanding of how to design cooperative behaviors

FIGURE 4-5 User interface for perimeter surveillance. The perimeter is marked in blue and miniature intrusion detection sensors are marked by circular numbered icons. An alarm is identified when the icon turns red. The vehicles closest to the intrusion attend to the alarm, while the others adjust their position around the perimeter to prepare for other possible alarms. SOURCE: Feddema et al. (2002). © 2002 IEEE.
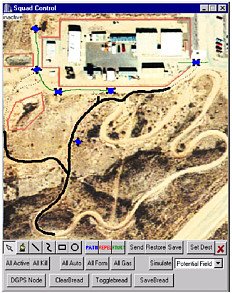
FIGURE 4-6 User interface for a facility reconnaissance mission. The initial positions of the vehicles were at the lower left corner of the screen. The vehicles first follow their assigned paths (drawn in black). Once they reach the end of their paths, the vehicles use a potential field path planner to avoid obstacles (drawn in red) and navigate towards goal attractors (drawn in green). To avoid collision between the vehicles and to uniformly cover the goal attractors, repulsive forces push the vehicles away from each other. The path plan is first previewed by the operator, after which the goal and obstacle polygons are downloaded to the vehicle and the same potential field path planner drives the vehicles toward the goal polygons while avoiding obstacle polygons, unplanned obstacles, and neighboring vehicles. The final path is not necessarily the same as the previewed paths since the potential field path planner will avoid sensed obstacles that were not in the original map and the real position of neighboring vehicles may be different at the time of execution. SOURCE: Feddema et al. (2002). © 2002 IEEE.
is still not understood. The budget requirements necessary to bring cooperative behaviors for multiple UGVs and UAVs up to a TRL 6 could be several million dollars, and the time horizon could be 10 to 15 years away.
Salient Uncertainties
There are many possible Army missions for which cooperative behavior will be important, including:
-
Perimeter surveillance
-
Facility reconnaissance
-
Plume localization
-
Distributed communication relays
-
Distributed target acquisition
-
Explosive ordnance detection and
-
Building a camera collage.
In each of these missions the relative position between adjacent vehicles is a primary control variable. For example, when guarding a perimeter or surrounding an enemy facility, it is desirable for robotic vehicles to be spread evenly around the perimeter. Unfortunately, current research on cooperative robotic vehicle systems assumes that the relative position between vehicles can be measured either with GPS or with acoustic or visual sensors. For military applications GPS may not always be available and acoustic and visual sensors are not covert and are limited to line-of-sight situations. A new means of measuring the relative position between vehicles is needed. For instance, a radio frequency-ranging system such as that proposed by Time Domain, Inc., may be one way of solving this problem. Without a robust means of determining the relative position of another vehicle over a significant range, cooperative robotics may not be possible for military missions.
For cooperation to occur either the robot vehicle must sense the state of another robot vehicle or the state must be communicated by another means, such as RF radios. In most cases considerable perception capabilities are required to perceive the state of another vehicle. It is often much simpler to communicate the state of the vehicle with RF radios. In these cases the feasibility of performing a cooperative task depends on the communication range and bandwidth of the radios onboard the vehicles.
Cooperative behavior is a software technology area that will most likely be upgraded as communication and perception sensors are upgraded. As with any software in critical systems the software must go through a stringent structured design review and all branches of the code must be thoroughly tested and validated before being installed. As the number of vehicles involved in the cooperative system increases there will be a possible combinatorial explosion of cases to test, since each vehicle could be executing a different branch. Simulation may be the only possible way to test all cases efficiently.
The foregoing provides the basis for the answer to Task Statement Question 4.b as it pertains to cooperative robot behaviors. See Box 4-5.
Areas of Research and Development
Research is needed in the following areas:
-
Simulation tools for testing cooperative behaviors should be developed. Similar to the robosoccer simu-
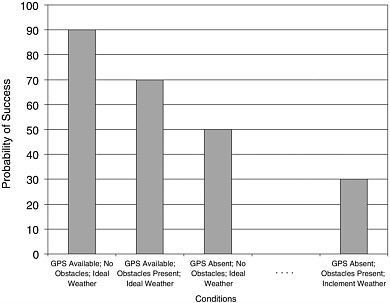
FIGURE 4-7 Probability of success depends on the presence of GPS and obstacles, the level of object recognition, and the weather conditions.
-
lator, these simulations can be used to compare and contrast competing cooperative behaviors. Two opposing teams executing competing cooperative behaviors can battle each other in cyberspace.
-
A playbook of cooperative behaviors needs to be tested and evaluated for their usefulness on real hardware. This playbook might include perimeter surveillance, communications relay, search and rescue, building infiltration, and de-mining.
-
Many of the cooperative tasks will require high-bandwidth communications. A trade study is needed to evaluate the trade-off between communication bandwidth and responsiveness of the system to perform the task. Will the bandwidth requirements of secure communications substantially limit which cooperative behaviors are feasible?
-
Detailed mathematical modeling of cooperative behavior is needed to fully understand how to design a local individual behavior that, combined with others executing the same local behavior, results in a useful global behavior. Currently these design tools do not exist.
LEARNING/ADAPTATION
This section outlines the state of the art in machine learning, including adaptive control. The committee considered “machine learning” to be synonymous with what is commonly called “soft computing.” Several briefings used the term “learning” in the sense of “perception” or “sensing,” both of which are covered in the opening section of this chapter. The Learning/Adaptation technology area includes neural networks, fuzzy logic, genetic algorithms, and adaptive controls. The first three are typically associated with artificial intelligence while the fourth is associated with control theory.
State of the Art
The primary characteristic of soft computing and other algorithmic approaches is that they are based on heuristics instead of provably correct mathematical properties. Thus, while results cannot be proven, the approaches have two primary advantages. First, they are not model-based and, second, they yield “good” solutions that would take a prohibi-
|
BOX 4-5 Task Statement Question 4.b Cooperative Robot Behaviors Question: What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)? Answer: For cooperation to occur either the robot vehicle must sense the state of another robot vehicle or the state must be communicated by another means, such as RF radios. In most cases considerable perception capabilities are required to perceive the state of another vehicle. It is often much simpler to communicate the state of the vehicle with RF radios. In these cases the feasibility of performing a cooperative task depends on the communication range and bandwidth of the radios onboard the vehicles. Cooperative behavior is a software component that will mostly likely be upgraded as communication and perception sensors are upgraded. As with any software in critical systems the software must go through a stringent structured design review and all branches of the code must be thoroughly tested and validated before being installed. As the number of vehicles involved in the cooperative system increases there will be a possible combinatorial explosion of cases to test, since each vehicle could be executing a different branch. Simulation may be the only possible way to test all cases efficiently. Cooperative behavior is still in a state of infancy. Although some simple cooperative control strategies have been demonstrated at universities and at the national laboratories, the design of cooperative behaviors is still not understood. The budget requirements necessary bring cooperative behaviors for multiple UGVs and UAVs up to a TRL 6 could be several million dollars, and the time horizon could be 10 to 15 years away. These uncertainties are bound by resource limitations and result from the technical nature of the task. |
tively long time using rigorous mathematical approaches (see Gad-el-Hak, 2001).
Neural Networks
Neural networks are collections of simple, interconnected, parallel-processing units roughly equivalent to the structure and operation of biological brains. Individual processing units or neurons are interconnected with synapses. If the accumulation of inputs in a particular neuron exceeds a particular threshold, the neuron fires by sending an electrical signal along its axon (output connection), which is connected to other neurons. These neurons in turn will fire if the accumulation of their input signals exceeds a certain threshold. This process, which generally occurs through several layers of cooperative behavior, leaves the system in a state that can be related to the input that created it. Learning, or the generation of a particular final state for a given input state or range of input states, occurs by appropriate adjustments to the synaptic connections between neurons (Schalkoff, 1997; Haykin, 1999; Chen, 1996).
The neural network technology application most relevant to autonomous UGVs would enable a vehicle to drive along a road. Another relevant application is image-segment identification needed for navigation or target recognition. On-road driving has been successfully implemented by academic researchers at Carnegie Mellon University (Baluja, 1996; Jochem et al., 1995a,b; Hancock and Thorpe, 1995; Pomerleau, 1992). Successful road-following was accomplished by training an artificial neural network using reduced resolution vision inputs and steering outputs to follow a road. To our knowledge artificial neural networks have not been used successfully for off-road navigation, probably because the highly unstructured nature of the off-road environment would make it very difficult to train the network to handle all possible likely scenarios.
Fuzzy Control
Fuzzy control is a design technique that is based upon mathematics concepts from fuzzy logic, which is an extension of classical logic, which in turn is based upon an extension of classical set theory. In classical set theory an element is either a member of a set or not. In fuzzy sets an element can have a fractional “degree of membership” (Zadeh, 1965; 1968a,b; 1971). The main advantages of fuzzy logic in controls applications are that (1) it provides a nonmodel-based means to synthesize controllers (i.e., the equations of motion do not need to be derived) and (2) it provides a structure for translating human knowledge or intuition about a complex system to a computer controller. Possible UGV applications include an alternative mechanism by which to effectively control a vehicle in situations where traditional control methodologies fail or are impossible to implement due to unknown modeling aspects of a complex system (Dubois et al., 1997; Tunstel et al., 2001; Kim and Yuh, 2001; Kadmiry et al., 2001; Wang and Lee, 2001; Howard et al., 2001).
Genetic Algorithms
Genetic algorithms represent an optimization technique based upon concepts from biological evolution. They work well when a global optimization cost function is discontinuous and for finding “good” solutions where more mathematically rigorous algorithms will fail to find a solution in a reasonable amount of time. Here candidate solutions are generated randomly, with variable values represented as genes in a chromosome (a string of ones and zeros). Successive generations are obtained by “mating” pairs of members where the “parents” are selected with a bias toward those with better values of the merit function. The combination ensures that the “offspring” inherit information from both parents. Overviews include those by Goldberg (1989), Michalewicz (1992), Mitchell (1997), and Man et al. (1999). Regarding autonomous vehicles, one possible use would be
to find an optimal (preplanned or re-preplanned) path between two points. Given that there may be an infinite number of paths with random obstacles the genetic algorithm approach is one method of finding the “best” path.
Adaptive Control
Adaptive control is a form of machine learning in that sensory information is used to modify either an internally stored system model or parameters in a controller. The class of systems to which an adaptive controller can be applied is limited relative to systems that can be controlled by soft computing. Overviews include those by Kaufman et al. (1994), Landau et al. (1998), Steinvorth (1991), and Astrom and Wittenmark (1989). While adaptive control is mature within control theory, the vast majority of results are limited to linear systems. Therefore, the more difficult aspects of autonomous navigation, which may be highly nonlinear, cannot be addressed by adaptive control. On the other hand, it may be entirely appropriate for lower-level, interior control loops within the operating mechanism itself.
Learning Applications
Learning may be applied to any of the software technologies of the UGV; however, its use has been limited in part by lack of computational resources. In perception, for example, learning is used extensively in feature classifiers (i.e., to classify regions as road or non-road or for terrain classification) (see Appendix C). Classifiers typically are based on neural-network or other statistical techniques. An issue is the extent to which models appropriate to off-road scenes could be developed. More generally the issue is how to provide performance evaluation functions so the system can self-assess its performance.
Technology Readiness
Machine learning is in a state of infancy, TRL 1 or 2 at best. Adaptive-learning algorithms, such as might be used by the Donkey example, are much more mature, TRL 3 or 4. While the latter may suffice for many Army requirements, the degree of machine learning that will be required for UGVs such as Wingman and Hunter-Killer to perform military missions and tasks is presently unknown.
Salient Uncertainties
It is widely accepted that learning is an essential element of unmanned systems; yet learning is not necessary and in many cases may be undesirable for military applications. Emergent, unpredictable behaviors are not desirable in soldiers, so why should they be desirable in unmanned systems? Would anyone board an airplane whose pilot was just learning the flight controls? Would you trust a robot with a weapon that is learning to use it? Even worse, would you trust a group of robots with weapons that they learned from each other how to handle?
There are at least three problems associated with learning: (1) Many of the current learning algorithms come up with “black-box” solutions that cannot be analyzed. Genetic programs now generate code that is incomprehensible. How can the Army verify and validate the algorithm that a learning system has generated? Presently there is no way to know if the system has learned a harmful side effect that will show up at the wrong time. (2) Current learning algorithms also require considerable training (millions of trials) and typically fail during the training run. Would such training and failure be acceptable for military applications? (3) Learning is not nearly as advanced, as some people believe. This technology is still in its infancy, and while it should be pursued at the academic level, it will take much longer than 20 years to reach the level where it should be incorporated into a military system with a weapon.
Critical elements missing from the Army’s approach are recognition of and a measure of the complexity of the environment in which UGVs will have to operate and a comparison with the level of complexity with which high-level control algorithms (i.e., current decision-making algorithms) can effectively handle. Methods from soft computing have been demonstrated in laboratory environments (i.e., very highly structured environments), but rarely if ever have they displayed even a fraction of the degree of robustness necessary to handle the complex environments envisioned by the Army for UGVs. It is still an open question whether these techniques ultimately will provide the solution to allow a UGV to operate effectively in a highly unstructured and uncertain environment or whether more standard but “brute force,” (i.e., computationally intensive) approaches will provide the solution.
Uncertainty exists concerning the degree to which methods from machine learning will ultimately provide solutions to complex real-world problems. While all the technology areas described have great potential and seem to display continued evolution, a true “learning machine” that could display sufficiently adaptive behavior (to include, for example, adaptive reasoning and reasoning under uncertainty to deal with UGV combat environments) is far from reality. Resource limitations are not relevant given the intensity and amount of attention given to machine-learning paradigms, particularly in academia.
The foregoing provides the basis for the answer to Task Statement Question 4.a as it pertains to learning/adaptation. See Box 4-6.
Areas of Research
The most promising areas of machine-learning algorithms is in perception and signal processing. Neural networks are already used in optical character recognition and handwriting recognition. The analogous application for UGVs is to infer high-level information from sensor data. Genetic algorithms are well established as optimization techniques.
|
BOX 4-6 Task Statement Question 4.a Learning/Adaptation Component of “Intelligent” Perception and Control Question: What are the salient uncertainties in the “intelligent” perception and control components of the UGV technology program, and are the uncertainties technical, schedule related, or bound by resource limitations as a result of the technical nature of the task, to the extent it is possible to enunciate them? Answer: Significant uncertainty exists concerning whether methods from machine learning will be essential to the successful development of UGVs. While the technology areas described have potential to provide solutions, a true “learning machine” that could display sufficiently adaptive behavior to deal with the complexities of the UGV combat environment is far from reality. Methods from soft computing have been demonstrated in highly structured laboratory environments, but rarely if ever have they displayed even a fraction of the robustness necessary to handle the complex environments envisioned by the Army for UGVs. This uncertainty extends to include the break point between adaptive control solutions and artificial intelligence solutions for each of the “intelligent” components of the autonomous system. Missing elements include a recognition of and a measure of the complexity of the environment in which UGVs will have to operate to compare with the level of complexity that high-level control algorithms (i.e., current decision-making algorithms) can handle effectively. Resource limitations are not relevant given the intensity and amount of attention given to machine-learning paradigms, particularly in academia. |
Identifying components of the overall control and decision-making strategy of a UGV that require optimization warrants near-term attention. Using methods from soft computing and adaptive control for higher-level decision making should be incrementally pursued.
Given current shortcomings, all four of the technology areas merit far-term investigation. In particular, each should be applied to progressively more complex problems in an effort to determine (1) algorithmic modifications and/or evolution necessary to handle increasingly complicated and uncertain problems and (2) how the amount of computing power necessary to effectively implement such algorithms in real-world situations scales with the complexity of the problem.
For FCS the Army should focus on use of learning technologies to resolve A-to-B mobility issues and on adaptive learning algorithms to develop tactical behaviors.
SUMMARY OF TECHNOLOGY READINESS
Table 4-9 summarizes the technology readiness level assessments made in each of the preceding sections vis-à-vis the four example UGV systems defined in Chapter 2. The table shows the time frame that the committee believes is appropriate for achieving TRL 6.
Capability Gaps
Each of the chapter sections identified salient uncertainties and technology and capability gaps that must be filled by the Army to support development of the four example systems. These are summarized in Table 4-10. For each gap listed, the committee estimated a degree of difficulty/risk (indicated by shading) according to the following criteria:
TABLE 4-9 Estimates for When TRL 6 Will Be Reached for Autonomous Behavior Technology Areas
|
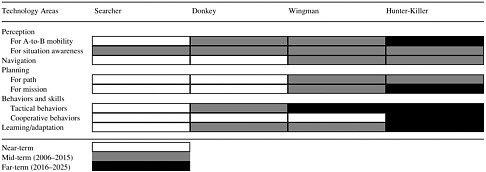 |
TABLE 4-10 Capability Gaps in Autonomous Behavior Technologies
|
Degree of Difficulty/Risk |
|
|||
|
Low |
||||
|
Medium |
||||
|
High |
||||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
Perception |
||||
|
A-to-B mobility on-road |
|
Algorithms and processing fast enough to support 40 km/h (road-following, avoidance of moving and static obstacles). |
Algorithms and processing fast enough to support 100 km/h (road-following, avoidance of moving and static obstacles). |
Algorithms and processing fast enough to support 120 km/h (road following, avoidance of moving and static obstacles). |
|
Sensors with long range. |
Sensors with long range. |
|||
|
A-to-B mobility off-road |
Algorithms for real-time two-dimensional mapping and localization. |
Detect and avoid static obstacles (positive and negative) at 40 km/h day or night. |
Sensors and strategies for fine positioning in bushes. |
Algorithms for multiple sensor and data fusion. |
|
Miniature hardened range sensors. |
Classify terrain (traversable at speed, in low visibility). |
Detect and avoid obstacles at 100 km/h. |
Detect and avoid static obstacles at 120 km/h. |
|
|
All-weather sensors. |
Classify vegetation as “push through” or not, detect water, mud, and slopes. |
Classify terrain and adapt speed, control regime. |
Classify terrain and adapt speed, control regime. |
|
|
Algorithms for GPS mapping and corrections. |
Continually assess terrain for potential cover and concealment. |
Continually assess terrain for cover and concealment. |
||
|
Multiple sensor fusion. |
|
|||
|
Situation awareness |
|
Algorithms for detecting humans (even lying down, versus other obstacles). |
Track manned “leader” vehicle. |
Algorithms and sensors to recognize movement and identify source. |
|
Sensors and algorithms for detecting threats. |
Select suitable OP (provides LOS cover and concealment). |
Select suitable OP (provides LOS cover and concealment). |
||
|
Detect, track, and avoid other vehicles or people. |
Detect, track, and avoid other vehicles or people. |
|||
|
Distinguish friendly and enemy combat vehicles. |
Distinguish friendly and enemy combat vehicles. |
|||
|
Detect unanticipated movement or activities. |
Detect unanticipated movement or activities. |
|||
|
Acoustic, tactile sensors for recognition. |
Detect potential human attackers in close proximity. |
|||
|
Sensors while concealed (indirect vision). |
||||
|
|
Capability Gaps |
|||
|
Technology Areas |
Searcher |
Donkey |
Wingman |
Hunter-Killer |
|
|
Localization to coordinate multirobots. |
|||
|
Identify noncombatants. |
||||
|
Navigation |
|
Relative navigation utilizing communications and GPS. |
Integration of GPS, digitized maps, and local sensors. |
Error detection and correction. |
|
Planning |
|
|||
|
Path |
Use DTED maps; 1-km replanning for obstacle avoidance. |
Plan relative to leader; reason about overlapping views. |
Tactical formation planning. |
|
|
|
Electronic “breadcrumbs.” |
Plan to rejoin or avoid team; use features other than terrain. |
Adjust route based on external sensor inputs. |
|
|
Decision template for alternative routing. |
Reasoning algorithms to identify and use concealment. |
Plan to optimize observation points, target kill arrays, and communication links. |
||
|
|
Multiobject and pursuit-evasion path planning for multiple UGVs. |
|||
|
Mission |
|
Mimic leader actions. |
Plan for complex missions including combat survival. |
|
|
|
Independent actions. |
Plan for team and marsupial operations. Independent actions. |
||
|
Behaviors and skills |
||||
|
Tactical skills |
Basic nonlethal self-protection if touched or compromised. |
Avoid enemy observation. |
Hooks for specialized mission functions (e.g., RSTA, indirect fire). |
Independent operations; fail-safe controls for lethal missions. |
|
|
|
“Flee and hide.” |
Self-protection. |
Self-preservation and defensive maneuvers. |
|
|
Complex military operational behaviors. |
Complex military operational behaviors. |
||
|
Cooperative robots |
Formation controls of multiple UGVs. |
Formation controls of multiple UGVs and UAVs. |
||
|
|
Cooperation for such tasks as hiding in bushes. |
|
||
|
Learning/adaptation |
Basic learning for survivability. |
Advanced terrain classification. |
Advanced fusion of multiple sensor and data inputs. |
|
|
|
|
Basic machine learning augmentation of behaviors. |
Advanced machine learning augmentation of behaviors. |
|
-
Low Difficulty/Low Risk—Single short-duration technological approach needed to be assured of a high probability of success
-
Medium Difficulty/Medium Risk—Optimum technical approach not clearly defined; one or more technical approaches possible that must be explored to be assured of a high probability of success
-
High Difficulty/High Risk—Multiple approaches possible with difficult engineering challenges; some basic research may be necessary to define an approach that will lead to a high probability of success.
|
BOX 4-7 Task Statement Question 3.d Autonomous Behavior Technologies Question: What technology areas merit further investigation by the Army in the application of UGV technologies in 2015 or beyond? Answer: The committee postulated operational requirements for four example UGV systems and determined critical capability gaps in multiple UGV technology areas merit further investigation by the Army. The technology areas and respective capability gaps are listed in Table 4-10. |
Tables 4-9 and 4-10 provide the basis for answers to Task Statement Questions 3.d and 4.c. See Boxes 4-7 and 4-8.
|
BOX 4-8 Task Statement Question 4.c Autonomous Behavior Technologies Question: Do the present efforts provide a sound technical foundation for a UGV program that could meet Army operational requirements as presently defined? Answer: Operational requirements are not clearly defined, and the technological base has consisted of diffuse developments across multiple potential missions. While relevant technologies will be enabled in the present program, the lack of user pull is a major detriment to achieving timely integration of a UGV system into the FCS. Furthermore, unless funding of the UGV technology base is significantly enhanced, the simplest of semiautonomous battlefield systems is not likely to be achieved before the 2010 time frame. |






























