
Applications of Biomimetics
MORLEY O. STONE
Air Force Research Laboratory
Wright-Patterson Air Force Base, Ohio
At first glance, imitating nature via biomimetics seems to be a straightforward proposition. For example, if you are a roboticist, add legs to the platform instead of wheels. Unfortunately, as is often the case, the devil is in the details. After a short synopsis of examples of biomimetic material synthesis, sensing, and robotics, I will attempt to identify some lessons learned, some surprising and unanticipated insights, and some potential pitfalls in biomimetics. (For recent perspectives on combining biology with other disciplines, see Naik and Stone, 2005.)
“JUST DON’T ADD WATER”
Often, biologists and engineers speak completely different languages. Perhaps the most graphic example of this is a comparison of the world of electrical engineers and sensor designers with the world of biologists. Manipulation of biological macromolecules (i.e., nucleic acids and/or proteins) involves the use of buffered solutions (usually pH ~ 7), controlled salinity, and regulated temperatures. Incorporating these biological salt solutions into electronics and sensor architectures seems like an oxymoron. However, the conversion of biological materials away from solution to solid-state processing has been a major objective in our laboratory.
The key to overcoming this seemingly insurmountable incompatibility is the use of “bridging” materials systems, such as polymer host materials that capture
and maintain biological functionality (Brott et al., 2004). Many polymer systems, such as poly(vinyl alcohol), qualify as hydrogels because they incorporate and maintain an enormous amount of water. While the biological side of this equation can be satisfied via the incorporation of water, polymer systems can be spin-coated, lithographically patterned, made conductive, and undergo a host of other treatments that electrical engineers routinely use. Thus, polymers represent a truly bridging material system in making biological macromolecules mesh with synthetic technology.
Another recent example highlights the potential of biological materials that have been integrated into a common electrical construct, such as a light-emitting diode (LED). To accomplish this, however, there must be a paradigm shift in materials thinking—namely, what would happen if DNA were processed in gram and kilogram quantities, instead of the traditional microgram quantities.
The fishing industry in Japan, which processes tons of seafood yearly, also throws away tons of DNA from fish gametes. Researchers at the Chitose Institute of Science and Technology in Japan, in partnership with our laboratory, have processed this discarded DNA into a surfactant complex and scaled the process up to a multigram scale (Wang et al., 2001). In this form and at this scale, DNA can be spin-coated into traditional electronics architectures. Recently, a DNA electron-blocking layer spin-deposited on the hole-injection side of the electron-hole recombination layer greatly enhanced LED efficiency and performance (Hagen et al., 2006) (Figure 1).
In another approach, we have attempted to use biology indirectly in advanced material synthesis and devices. Similar to the refrain from a commercial for a popular chemical company, biology isn’t in the final material, but it makes the final material better. Researchers around the world racing to harness the incredible electronic, thermal, and mechanical properties inherent in single-
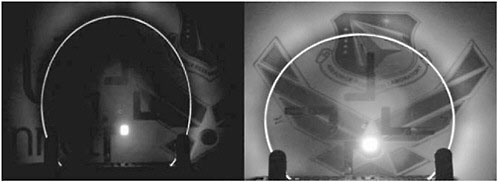
FIGURE 1 Photographs of Alq3 green emitting bio-LED and baseline OLED devices in operation.
walled carbon nanotubes (SWNTs) have run into a formidable obstacle. After a typical synthesis run, there is a large variety (both in length and diameter) of carbon nanotubes. This variety contributes to a number of chiralities, which dictate the metallic or semiconducting nature of the SWNT. Much of this size heterogeneity arises from the heterogeneity of the starting metallic nanoparticles used to catalyze the growth of SWNTs.
Ferritins and ferritin-like proteins sequester iron (in the form of iron oxide) in precisely defined cavities ranging from 8 nm to 4 nm for human and bacterial forms, respectively. We recently engineered a bacterial form called DPS to produce uniform, monodisperse iron oxide particles (Kramer et al., 2005). We reasoned that a monodisperse starting pool of nanoparticles would lead to a more monodisperse population of SWNTs. After the bacterial protein was used to produce the iron oxide particles, the biological shell was removed via sintering in a reduced atmosphere and subjected to gas-phase carbon-nanotube growth. The resulting SWNTs adopted the monodisperse character of the starting catalyst particles. Thus, biology was not in the final product but was used to make a technologically promising material better.
MATERIALS SCIENCE AND ENGINEERING OVERLAP BIOLOGY
From a materials science and engineering perspective, favorable electronic and structural properties usually emerge when the synthesis process can be controlled at finer and finer levels. Hence the frenzy and hype over nanotechnology. As illustrated in the carbon nanotube example, biology can provide tools for controlling and/or synthesizing materials at the molecular level.
An example of this control is unicellular algae, called diatoms, which make exquisite cellular structures out of silica. Thousands of species of diatoms exist in salt and fresh water. Each diatom species makes unique silica structures and patterns—from hinges to intricate arrays of holes and spines. Silica synthesis occurs at ambient temperature and pH and has a complexity greater than anything we can make synthetically using sol-gel techniques.
Kröger and colleagues (1999) provided insight into the silica-deposition process of diatoms, which has led to a complete rethinking of the molecular evolution of this process (Naik et al., 2002) and how it can be used in practical applications, such as enzymatic encapsulation (Luckarift et al., 2004). Based on work by Kröger and others, the field of biomineralization has expanded the range of materials synthesized via a biological route to encompass not only oxides, but also metals and semiconductors (Slocik et al., 2005).
Specific peptides can now be used for the nucleation and growth of inorganic nanomaterials. When one considers that peptides specific for inorganic binding and nucleation can be combined (i.e., genetically fused) with peptides that bind another moiety, endless possibilities begin to emerge. For example, biological macromolecules might be incorporated directly into electronic struc-
tures/devices. One can imagine literally growing a field-effect transistor (FET) metal-oxide-metal architecture via a biological route, rather than relying on standard top-down photolithographic processes.
There might also be new approaches in optics and catalysis where there are now significant challenges in assembling and interconnecting the building blocks of a nanoscale device. One might be able, for example, to address or measure responses electronically at the molecular level. The very real scale gap between the size of the molecule and the limits of lithography is shrinking. Bio-based approaches are being pursued to develop bottom-up self-assembly techniques that provide specificity and versatility. Peptides that recognize inorganic surfaces can be used as templates to organize and/or synthesize inorganic materials. By combining different functional peptides, we can create multifunctional polypeptides that can be used to synthesize and assemble hybrid materials. Recently, we demonstrated that by growing bimetallic systems using a bio-based approach, we can enhance catalytic activity of bimetallic materials (Slocik and Naik, 2006).
In nature, the programmed assembly of amino acids in a polypeptide sequence gives rise to protein molecules that exhibit multifunctional properties. Similarly, using protein engineering, inorganic binding peptide segments can be fused to create multifunctional polypeptides to assemble and/or synthesize hybrid materials. By exploiting the interaction between peptides and inorganic materials, a peptide that contains two separate domains (each responsible for binding to a specific metal species) can be used to assemble hybrid materials (Figure 2). Thus, we can control/program synthesis of bimetallic structures. The bimetallic nanoparticles made by using the designer peptides were found to be efficient catalysts in the hydrogenation of 3-buten-1-ol.
This method represents a generalized approach to achieving hybrid structures by programming the amino acid sequence presented by the peptide interface. The peptide interface may be used to conjugate nanoparticle surfaces to polymers, organic molecules, or other biomolecules. However, to fully appreciate the potential of peptides and other biological building blocks as molecular templates, we will need a better understanding of the interaction between
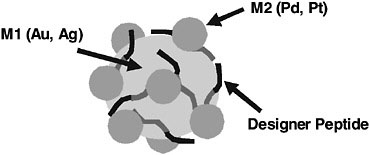
FIGURE 2 Assembly of hybrid materials using designer peptides.
biomolecules and inorganic surfaces. Using computational modeling, we should get a much clearer understanding of the mechanism of peptide-inorganic interactions. In the future, one should be able to create hybrid materials using protein engineering by dialing in the sequence domains to direct their synthesis and assembly.
BIO-INSPIRED ROBOTICS: APPLIED BIOLOGY AND ENGINEERING
The combination of biological principles, mechanical engineering, and robotics has opened entirely new areas and possibilities. Starting with the question of why legs matter, the field of biodynotics is exploding to encompass why materials properties matter, why mechanics and architecture matter, and how biological insights can lead to completely new capabilities. For example, entirely new lessons and robotic capabilities have emerged, such as dynamic compliance, molecular adhesion, conformal grasping, and dynamic stability, to name just a few of the concepts that have been implemented into robotic platforms.
The first contributions of biology to robotics were based on the insight that a sprawled posture used opposing forces to achieve self-stabilization (Dickenson et al., 2000; Full and Tu, 1991). Much of this early work was focused on understanding the mechanics involved in legged locomotion. The spring-loaded inverted-pendulum model has been accepted as an accurate model of biological locomotion independent of the number of legs or the biological platform (i.e., horse or human or cockroach).
Recently, the Cutkosky laboratory at Stanford, where pneumatically driven hexapod running robots were developed, has been challenged to build a wall-climbing platform capable of emulating gecko-like behavior (Clark et al., 2001). From a materials science perspective, the challenge has been to produce synthetic, self-cleaning hair arrays with a diameter of 200 nm at a density of 1–2e9 hairs/cm2.
The field of robotics would also benefit immensely from the development of tunable (dynamic) modulus materials. Today, compliance is usually tuned mechanically, which entails high costs in weight and power and produces less than satisfactory performance. There are numerous biological models of tunable modulus materials (e.g., the sea cucumber), and extrapolating these lessons to robotics could have a huge impact.
CONCLUSION
In our research, we are framing future investments in an area we call biotronics, a term that encompasses both bioelectronics and biophotonics. As the LED and FET examples described above suggest, this area is ripe for revolutionary breakthroughs. New capabilities, like tunable dielectrics, could revolutionize
sensing and electronic readout. We believe that an integrated package of sensing and readout will emerge.
Biology may also enable us to fabricate materials, structures, and devices from the bottom up. Many believe that we will have to turn to biology for commercially viable nanomanufacturing. Catalysis and self-assembly have been mastered by biological systems like enzymes and viruses, respectively. These lessons are being applied to traditional solid-state electronics, and engineers are beginning to realize the possibilities.
To continue advancements in biomimetics, we must include these principles in undergraduate and graduate training programs. Many other countries are also awakening to this realization. Thus, the future technical base of our country will depend on how well the science and engineering departments in our universities encourage this interdisciplinary training.
REFERENCES
Brott, L.L, S.M. Rozenzhak, R.R. Naik, S.R. Davidson, R.E. Perrin, and M.O. Stone. 2004. A poly(vinyl alcohol)/carbon-black composite film: a platform for biological macromolecule incorporation. Advanced Materials 16: 592–596.
Clark, J.E, J.G. Cham, S.A. Bailey, E.M. Froehlich, P.K. Nahata, R.J. Full, and M.R. Cutkosky. 2001. Biomimetic Design and Fabrication of a Hexapedal Running Robot. Pp. 3643–3649 in Proceedings of the IEEE International Conference on Robotics and Automation, Vol. 4. Piscataway, N.J.: IEEE.
Dickenson, M.H., C.T. Farley, R.J. Full, M.A.R. Koehl, R. Kram, and S. Lehman. 2000. How animals move: an integrative view. Science 288: 100–106.
Full, R.J., and M.S. Tu. 1991. Mechanics of a rapid running insect: two-, four-, and six-legged locomotion. Journal of Experimental Biology 156: 215–231.
Hagen, J.A., W. Li, A.J. Steckl, and J.G. Grote. 2006. Enhanced emission efficiency in organic light-emitting diodes using deoxyribonucleic acid complex as an electron blocking layer. Applied Physics Letters 88: 171109–171111.
Kramer, R.M., L.A. Sowards, M.J. Pender, M.O. Stone, and R.R. Naik. 2005. Constrained iron catalysts for single-walled carbon nanotube growth. Langmuir 21: 8466–8470.
Kröger, N., R. Deutzmann, and M. Sumper. 1999. Polycationic peptides from diatom biosilica that direct silica nanosphere formation. Science 286: 1129–1132.
Luckarift, H.R., J.C. Spain, R.R. Naik, and M.O. Stone. 2004. Enzyme immobilization in a biomimetic silica support. Nature Biotechnology 22: 211–213.
Naik, R.R., and M.O. Stone. 2005. Integrating biomimetics. Materials Today 8: 18–26.
Naik, R.R., L.L. Brott, S.J. Clarson, and M.O. Stone. 2002. Silica-precipitating peptides isolated from a combinatorial phage display peptide library. Journal of Nanoscience and Nanotechnology 2: 1–6.
Slocik, J.M., and R.R. Naik. 2006. Biologically programmed synthesis of bimetallic nanostructures. Advanced Materials 18: 1988–1992.
Slocik, J.M., M.O. Stone, and R.R. Naik. 2005. Synthesis of gold nanoparticles using multifunctional peptides. Small 1(11): 1048–1052.
Wang, L., J. Yoshida, and N. Ogata. 2001. Self-assembled supramolecular films derived from marine deoxyribo-nucleic acid (DNA)-cationic surfactant complexes: large-scale preparation and optical and thermal properties. Chemistry of Materials 13: 1273–1281.






