2
Assessments of the Projects of the Exploration Technology Development Program
This chapter contains the committee’s findings and recommendations on the 22 projects constituting NASA’s Exploration Technology Development Program (ETDP). Following a summary of each project’s objectives and status is the committee’s review of the quality of each project, the effectiveness with which the project is being developed and transitioned to the Constellation Program, and the degree to which the project is aligned with the Vision for Space Exploration (VSE).
Each of the 22 ETDP projects was evaluated on the basis of the following criteria:
-
The quality of the research effort, taking into account the research team, contacts with appropriate non-NASA entities, and the plan for achieving the objectives;
-
The effectiveness with which the research is carried out and transitioned to the exploration program, including progress to date, facilities, apparent gaps in the program, and the likelihood that the required technology readiness level (TRL) will be reached1 (the committee decided that simply noting gaps, as stated in the study task, was too narrow an objective and that gauging “effectiveness” as defined here was more appropriate); and
-
The degree to which the research is aligned with the Vision for Space Exploration (since the VSE includes the wording “in preparation for human exploration of Mars,” the committee chose to highlight any project that did not appear to have considered plans that included this aspect).2
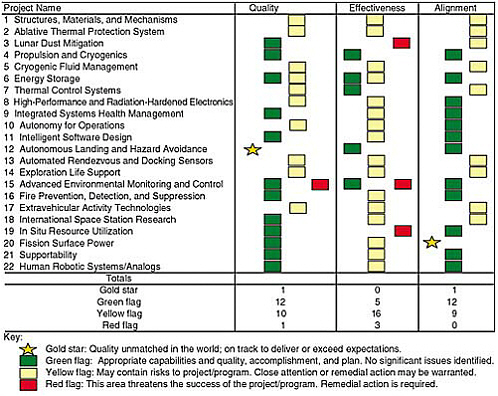
In each of these three areas, the committee rated the projects using a flag whose color represents the committee’s findings on the project. A summary of the ratings scheme is provided in Table 2.1. A few projects were given two flag colors stemming from major distinctions between elements in the project. In the sections below, detailed observations on each project are presented, and gaps within a given project are identified. As is noted at
|
1 |
See Appendix D for definitions of technology readiness levels. |
|
2 |
The committee notes that after the completion of its assessments of the 22 individual projects in late 2007, the Congress passed the fiscal year 2008 Omnibus Appropriations Bill, which contained a provision prohibiting NASA from funding any activities devoted solely to preparing for the human exploration of Mars. The committee chose not to modify its findings on alignment with the VSE based on this language for several reasons. First, the committee interpreted as dominant its statement of task, which includes reference to the entire Vision for Space Exploration, explicitly including the human exploration of Mars. Second, by and large, on this alignment criterion the committee was critical of technology projects that did not consider extensibility of their technology to Mars. An example of potentially extensible technology is the Orion thermal protection system for Earth reentry. The committee did not criticize in the assessment of the 22 projects the absence of a Mars-unique technology, an example of which is a martian aerodynamic entry descent and landing system. |
TABLE 2.1 Summary of the Committee’s Assessment Ratings Scheme
the end of the chapter, the ratings constitute the committee’s findings on the 22 projects. The committee’s general recommendation is that those projects should be improved whose ratings indicate the need for positive change.
The 22 projects assessed, with a short description of each, are as follows:
01 Structures, Materials, and Mechanisms: Technologies for lightweight vehicle and habitat structures and low-temperature mechanisms.
02 Ablative Thermal Protection System for the Crew Exploration Vehicle: Prototype, human-rated, ablative heat shield for Orion (the crew vehicle) and advanced thermal protection system materials.
03 Lunar Dust Mitigation: Technologies for protecting lunar surface systems from the adverse effects of lunar dust.
04 Propulsion and Cryogenics Advanced Development: Non-toxic propulsion systems for Orion and the Lunar Lander.
05 Cryogenic Fluid Management: Technologies for long-term storage of cryogenic propellants.
06 Energy Storage: Advanced lithium-ion batteries and regenerative fuel cells for energy storage.
07 Thermal Control Systems: Heat pumps, evaporators, and radiators for thermal control of Orion, and lunar surface systems such as habitats, power systems, and extravehicular activity (EVA) suits.
08 High-Performance and Radiation-Hardened Electronics: Radiation-hardened and reconfigurable, high-performance processors and electronics.
09 Integrated Systems Health Management: Design, development, operation, and life-cycle management of components, subsystems, vehicles, and other operational systems.
10 Autonomy for Operations: Software tools to maximize productivity and minimize workload for mission operations by automating procedures, schedules, and plans.
11 Intelligent Software Design: Software tools to produce reliable software.
12 Autonomous Landing and Hazard Avoidance Technology: Autonomous, precision-landing and hazard avoidance systems.
13 Automated Rendezvous and Docking Sensor Technology: Development of sensors and software to rendezvous and dock spacecraft.
14 Exploration Life Support: Technologies for atmospheric management, advanced air and water recovery systems, and waste disposal.
15 Advanced Environmental Monitoring and Control: Technologies for monitoring and controlling spacecraft and habitat environment.
16 Fire Prevention, Detection, and Suppression: Technologies to ensure crew health and safety on exploration missions.
17 Extravehicular Activity Technologies: Component technologies for an advanced EVA suit.
18 International Space Station Research: Fundamental microgravity research in biology, materials, fluid physics, and combustion using facilities on the International Space Station.
19 In Situ Resource Utilization: Technologies for regolith (loose rock layer on the Moon’s surface) excavation and handling, for producing oxygen from regolith, and for collecting and processing lunar ice and other volatiles.
20 Fission Surface Power: Concepts and technologies for affordable nuclear fission surface power systems for long-duration stays on the Moon and the future exploration of Mars.
21 Supportability: Technologies for spacecraft and lunar surface system repair.
22 Human-Robotic Systems/Analogs: Technologies for surface mobility and equipment handling, human-system interaction, and lunar surface system repair.
Descriptions of the ETDP and its technology infusion plans can also be found in two public documents.3,4
01
STRUCTURES, MATERIALS, AND MECHANISMS
Objective
The Structures, Materials, and Mechanisms project has two goals: (1) to develop lightweight structures for lunar landers and surface habitats, which may be used in future modes of the Crew Exploration Vehicle (CEV) and crew launch vehicle to save weight and/or cost, and (2) to develop low-temperature mechanisms for rovers, robotics, and mechanized operations that may need to operate in shadowed regions of the Moon.
Status
The structures element of the Structures, Materials, and Mechanisms project consists of inflatable (expandable) structures for buildings on the surface of the Moon and very large single-segment propellant tank bulkheads made
|
3 |
C. Moore and F. Peri, “The Exploration Technology Development Program,” AIAA Paper 2007-136 in 45th Aerospace Sciences Meeting Conference Proceedings, American Institute of Aeronautics and Astronautics, Reston, Va., 2007. |
|
4 |
D.C. Beals, “Technology Infusion Planning Within the Exploration Technology Program,” IEEEAC Paper #1108, available at http://ieeexplore.ieee.org/iel5/4161231/4144550/04161576.pdf. |
of aluminum-lithium (Al-Li). The materials element consists of parachute material, radiation shielding kit materials, and Al-Li for very large propellant tank domes. Little in the way of advanced materials for lightweight vehicles, landers, rovers, and habitats was presented to the committee. The mechanisms element consists of gear boxes, electric motor sensors, and motor controls for robotic systems that would operate in continuous darkness at the poles.
Most elements of this project use system engineering principles to provide minimum risk and to ensure on-time delivery. Designing, fabricating, and testing a piece of demonstration hardware are aspects of all three elements. This project is staffed and conducted primarily at NASA, with a few industry and academic partnerships.
The potential application of lean manufacturing and rapid prototyping technologies needs to be fully explored in the current ETDP. Experience has shown that these technologies can have a significant impact on cost and schedule.
Ratings
Quality: Yellow Flag
Some team members appear to have little or no expertise in their project area. A lack of experience combined with limited interaction with industry can have a serious adverse impact on the quality of work. The lack of interaction with industry has resulted in situations in which NASA work has not yet reached the TRL level of similar projects in industry that are currently at TRLs of 6 or 7. An example of industry capability is Al-Li structures and welding. In addition, industry has demonstrated large friction stir weld-spun domes that are very close to the Ares I requirements. The alloy Ti Al Beta 21 S is currently being used by industry and is not being considered by NASA in the VSE program. The project group itself identified some existing manufacturing techniques not being used by NASA owing to licensing issues rather than technology development issues. It also appears that a lack of specific requirements in some cases has allowed in-house projects to float goals and produce simplistic measures of success.
Effectiveness in Developing and Transitioning: Yellow Flag
This set of activities seem to lack direct tie-in to an integrated, overarching plan. The objectives for most of the tasks are not rooted directly in supporting the VSE or Constellation Program requirements, which limits their ability to be transitioned to the customer. While this limits the risk to the customer, it also limits the overall effectiveness of the work. It is not clear why some specific elements of this project were selected; nevertheless, overall, the project is proceeding in a timely manner and the results are expected to be available to meet VSE and Constellation Program schedules.
Following are comments of the committee on specific project issues:
-
Aluminum-lithium manufacturing: friction stir weld-spun domes. The metals industry has been crafting friction stir weld and spun domes for a long time. The main reason for pushing this technology is the required size—that is, the 5.5-meter diameter. However, other non-NASA organizations have achieved this technology in sizes very close (5.2 m) to what NASA is trying to achieve. The benefit to the Constellation configuration from incorporating this technology with a small delta in dimension from the state of the art is not clear.
-
Low-temperature mechanisms. This project element has selected a few components and tested them under the cold temperature extremes present on the Moon. However, when asked about its specific application, the project team was unsure. Some components may work individually under the specified environment but may not function as part of higher-level subsystems or systems.
-
Advanced material for parachutes. This project element lacks a useful figure of merit. Material is being evaluated for potential application as the CEV parachute material. Team members stated that this material has a strength-to-weight ratio approximately twice that of other currently available fibers, and consequently, that it will yield more than 40 kg in mass savings for the three CEV parachutes. Unanswered is the question of the cost per kilogram to achieve this reduction in mass and the resulting overall gain in system performance.
-
Expandable structures. This project element uses lunar regolith as part of a pressurized architecture, which is somewhat cumbersome. It is not clear that this is the best design solution because, for example, the abrasive dust in a low-gravity situation could be a menace to equipment and personnel.
-
Advanced composite structures. Exotic materials, such as lightweight composites, often promise great advantages on paper and sometimes in practice. It was not clear from the presentation of the team responsible for this element how and where these composite materials were going to be applied throughout the Constellation Program. The performance benefit or the figure of merit was not clearly identified. Composite materials may potentially provide significant advantages in weight reduction, but system trade-offs are needed in order to identify and quantify those gains.
-
Facilities. No new facilities were identified by the committee as needed to validate performance capabilities.
-
Radiation shielding kit. This technology, which proposes a type of blanket or sleeping bag approach as a portable shield, is a good fundamental research area. However, unless its specific application to various program elements is identified, it is very difficult to see its impact. The use of this kit was not traded against other competing options, and it requires figures of merit.
Alignment with the Objectives of the Vision for Space Exploration: Yellow Flag
The performance benefit to the VSE and Constellation programs from the Structures, Materials, and Mechanisms project may not be fully achieved because of an apparent lack of specific requirements coming from the Constellation Program office. There appears to be little in the way of enabling technology in this project. Therefore, a strong push for these technologies by the customer is not apparent.
02
ABLATIVE THERMAL PROTECTION SYSTEM FOR THE CREW EXPLORATION VEHICLE
Objective
Extremely large heat fluxes are experienced by the Crew Exploration Vehicle (CEV) during reentry from the Moon or Mars. An ablative heat shield is required for thermal protection. The heat shield design and thermal protection system (TPS) material qualification represent major technological challenges. The NASA team for this project stated that the present TRL is 4. The TRL needs to be advanced to 6 to support the CEV project.
Status
The project team is composed of NASA, the companies producing the materials, and the CEV contractor. The work is being carried out in a coordinated manner and, overall, is of good quality. The currently used metrics are appropriate. It appears that an upgrade to the arc-jet facility at NASA’s Ames Research Center (ARC) will take place that will improve its flow simulation capabilities.
Material test specimens and TPS materials for the primary and backup CEV heat shields are being produced by aerospace companies. The CEV contractor has built a full-scale heat shield test article and will build the flight heat shield. These developments are being directed and reviewed by NASA to ensure the coordinated consideration of reentry mechanical and thermal loads. There is no possibility of alternate technologies being developed within the ETDP. The plan is to have an acceptable TPS design by CEV Preliminary Design Review (PDR) and to have the technology matured by CEV Final Design Review (FDR).
Ratings
Quality: Yellow Flag
The heat shield is being designed using heating rate predictions from an uncoupled analysis; that is, the char surface temperatures are assumed to be radiation equilibrium temperatures rather than being calculated from a heat
balance for the ablating heat shield. The injection of the pyrolysis gases and char oxidation products (which may significantly change the prediction of the heating rate) is ignored. This approach does not represent the current state of the art and could lead to either an over- or underprediction of the bond-line temperatures late in the entry.
While industry has been involved in producing candidate TPS material, there is no significant involvement of the national laboratories. However, organizations such as Sandia National Laboratories as well as other Department of Energy (DOE) and Department of Defense (DOD) laboratories could contribute to this effort.
Effectiveness in Developing and Transitioning: Yellow Flag
Even though 40 years have elapsed since the Apollo 4 flight test and the state of the art in heat shield design has advanced significantly during that time, the ability to simulate a lunar-return Earth entry in ground-based facilities still does not exist. The planned ground-test arc-jet facility improvements are desirable, but they will not provide an adequate approximation of all flight conditions and cannot be scaled to the full heat shield dimensions. Within the present state of the art, it is not possible to build ground test facilities that will duplicate (or even adequately approximate) flight conditions. Only a reentry flight test at lunar-return velocity and at a scale sufficient to assess the effects of joints and gaps between the heat shield panels will qualify the heat shield for use on a crewed lunar-return mission. Because NASA had not made a decision at the time that the committee was carrying out its data gathering, the committee was not clear as to whether an uncrewed flight test is planned; if not, the effectiveness with which this project is being developed and transitioned would be labeled with a red flag.
Alignment with the Vision for Space Exploration: Yellow Flag
Planetary-return heating rates are much higher than lunar-return heating rates. A CEV-like vehicle entering at 13 km/s from Mars will experience peak stagnation-point heating rates (convective and radiative) three times greater than the lunar-return values. Furthermore, at 13 km/s the stagnation-point heat load is approximately 70 percent radiative, whereas for lunar-return entries it is less than 25 percent. Therefore, an entirely different heat shield design may be required for reentry from Mars; hence the present technology does not fully support the entire VSE.
03
LUNAR DUST MITIGATION
Objective
Dust was an issue for the Apollo astronauts, and it continues to be an issue for the Mars Exploration Rovers (MERs). Dust presents both a health risk (e.g., from inhalation and damage to spacesuits) and a mission risk (e.g., for its obscuring of landing sites, causing equipment to overheat, and covering solar arrays). In response to these dust issues, NASA established the Lunar Dust Mitigation project, with the goal of providing the “knowledge and technologies (to TRL 6) required to address adverse dust effects to humans and to exploration systems and equipment, which will reduce life cycle cost and risk, and will increase the probability of sustainable and successful lunar missions.”5
Status
The Lunar Dust Mitigation project has clearly defined requirements that have been delineated into well-stated project plans to bring the TRL to 5. The development objectives of each of these plans were understood by the team members as clearly stated deliverables. Interaction within the NASA organizations involved in the project seems appropriate. The expertise of dealing with regolith resides within NASA, but outside sources are being sought in appropriate areas where industrial cooperation can benefit the program. The extensibility to Mars appears to be assumed, as the Moon is the current focus. The team seems to be motivated and enthusiastic about achieving its
goals. The team has test plans within the scope of available resources—that is, test facilities—but the need for full-scale testing is not reflected in the current project plan or the Constellation plan. Individual experiences within the Apollo program are being folded in to the development of the projects, except for the overall experience of equipment being crippled by dust contamination on the surface.
Ratings
Quality: Green Flag
The Lunar Dust Mitigation project plan has well-developed requirements and an appropriate layout of program elements to achieve a TRL of 5. Requirements from many sources are driving the correct program development to satisfy the goals. Outside sources have been sought for expertise in dust mitigation within the mining industry—more interaction with hard-rock mining would enhance this effort. Small Business Innovation Research (SBIR) projects are also being used to solicit outside expertise and advance the TRL in some areas. Apollo experiences with dust effects are being folded in to the technology plans. Component-level testing of various mechanisms in a vacuum environment is a good element of this program.
Effectiveness in Developing and Transitioning: Red Flag
Low-TRL ideas that would be matured later than 2013 are not being considered currently in SBIR or other programs; this will limit the continuity of new ideas being inserted into this project’s long-term goals. The production of regolith simulant in the time necessary to allow for testing also poses a risk to this effort. Currently, the risks are very high owing to the lack of full-scale, long-term testing to prove the effectiveness of the developed products. A full-scale test facility and the testing of equipment (e.g., bearings and seals, robots, EVA suits, crawlers) under long-term exposure are necessary for the ETDP to develop and prove the criticality of these vital resources on the Moon and Mars. The lack of plans to include a full-scale test facility negatively impacts the effectiveness of the effort in a major way and if left unresolved virtually guarantees failure to reach project goals expressed as TRL 6.
Alignment with the Vision for Space Exploration: Yellow Flag
The impact of the Lunar Dust Mitigation project on the VSE is clearly enabling, and this is understood by the Constellation Program. Without control of the effects of dust, exploration on the surface would be seriously compromised. Even robotic precursors could be less effective without this control. This is recognized by the NASA team and included in its project plans. The yellow flag rating reflects the lack of any development for the Mars environment—which may have its own problems with dust as shown by the MERs—as the lunar environment appears to be the sole focus of this project.
04
PROPULSION AND CRYOGENICS ADVANCED DEVELOPMENT
Objective
The Propulsion and Cryogenics Advanced Development (PCAD) project is focused on the development of the ascent and descent propulsion systems for the Lunar Lander. The team is working on three main areas: the descent main engine, the ascent main engine, and reaction control system (RCS) thrusters for the ascent propulsion system. According to NASA, the ascent liquid oxygen/methane (LOX/CH4) main engine is currently at TRL 3, the RCS thrusters are at TRL 4, and the descent main engine is at TRL 5.
Status
The PCAD team is composed of NASA employees and several contractors for the main engines and the RCS. The contractors include major aerospace companies and smaller companies. The PCAD project is well focused
around the established risk areas for each of the three main project elements that are being worked on. The main customers of PCAD are the Lunar Lander Projects Office (LLPO) and the Orion Crew Module Project Office.
For the descent main engine, the current choice of propellants is liquid oxygen/liquid hydrogen (LOX/LH2). This choice was made to meet the lander weight budget because the performance of LOX/LH2 is better than that of storable propellants. Meeting the throttle requirement for this engine (currently about 30 percent, but for some versions it could be lower) is mission enabling for the Lunar Lander. The main risks with this engine are stable throttling, performance, and reliable ignition.
For the ascent propulsion system, nitrogen tetroxide/monomethyl hydrazine (NTO/MMH) and LOX/CH4 are under consideration. However, the current technology project is focused only on LOX/CH4, since this is a new propellant combination to be used for this application. The projected benefits of using LOX/CH4 versus hypergolic fuels are higher performance, which translates into mass savings of approximately 180 kg to 360 kg; lower costs; and a comparable development schedule and achievable reliability. The main challenges that need to be resolved for the LOX/CH4 engine to be chosen over the storable propellants are reliable ignition (especially after long-term missions on the order of 6 months), performance, and fast start. RCS thrusters using LOX/CH4 are also being developed that are intended to have higher performance and maneuverability than those using storable propellants. In this case, the major risks are reliable ignition, performance, storability, and repeatable pulse width.
Although Russia, Korea, Pratt & Whitney Rocketdyne, and others are designing or have designed liquid oxygen/methane (LOX/CH4) engines, they are not designed for a similar application and therefore are not being used as a baseline for comparison with the current ascent engine being developed.
Both main engines and the proposed RCS described above minimize the contamination of the vehicle and landing area and improve ground procedures on the launch pad.
Ratings
Quality: Green Flag
The work of the PCAD project seems to be well coordinated among the primary customers, namely, the Lunar Lander Projects Office and the Orion Crew Module Project Office, the NASA technology development teams from the NASA Glenn Research Center (GRC), the NASA Johnson Space Center (JSC), and the NASA Marshall Space Flight Center (MSFC), and the contractors. The existing test facilities seem to be sufficient for this project.
For the descent engine, the team is pursuing a LOX/LH2 engine based on the RL-10 and is working with Pratt & Whitney Rocketdyne to develop the new engine. The team is tackling critical design issues, such as the injector design. Its metrics are well defined and relevant to the development program. The team is aware of the risks that it faces. However, there are gaps in the project that the team is aware of but could not address owing to insufficient resources: controls, turbomachinery, and high-heat-transfer chambers.
For the ascent module, the team is focusing on LOX/CH4 for the reasons mentioned above. The team plans to mature this technology before the LLPO has to choose between this new technology and hypergolic fuels. The team is very aware of the key parameters that it must demonstrate: reliable ignition, performance, and fast start. Its program is well tailored to these objectives. The team is simultaneously carrying out a development project for LOX/CH4 RCS thrusters that would go hand in hand with the main engine.
Effectiveness in Developing and Transitioning: Green Flag
The LLPO is considering two choices for the main ascent engine: LOX/CH4 and storables. Because the risks associated with developing an LOX/CH4 engine are greater than those associated with developing a storable propellant engine for this application, the decision has been made to focus only on the LOX/CH4 engine in the technology project. As a result of a first set of vehicle studies carrying out both options, the LLPO found that an LOX/CH4 engine could result in a mass savings of 180 kg to 360 kg. As of this writing, the decision about which type of engine to procure was slated for 2011 or so, after the PCAD team has had a chance to investigate in detail the prospect of using LOX/CH4 and has given its results to the LLPO and others to support an informed decision.
Within PCAD, preliminary tests carried out by the two contractors working on the LOX/CH4 engine are underway. Alternative designs are also being considered. The PCAD team and the LLPO are working closely to feed each other the results from their studies.
For the descent engine, the team is carrying only one contractor, Pratt & Whitney Rocketdyne, owing to cost constraints, which means that only one design is being considered. However, in terms of transition, the team is well positioned because the contractor has been involved from the beginning and has the experience to complete the full cycle of design, development, testing, and production.
Alignment with the Vision for Space Exploration: Green Flag
An LOX/CH4 main ascent engine would be a great benefit for Mars exploration because it is amenable to in situ resource utilization. The team has also tried to foresee what requirement changes the LLPO might present to it and has tried to develop flexible designs. For example, its LOX/CH4 engine project is expected to be flexible with respect to thrust changes and the number of the starts required.
The PCAD technology development team is pursuing “green” propellants such as LOX, LH2, and CH4, as opposed to hypergolic fuels, for both the descent and the ascent engines. One can only assume that such “green” propellants will continue to be the preferred choice for other exploration-class missions.
05
CRYOGENIC FLUID MANAGEMENT
Objective
The objective of the Cryogenic Fluid Management (CFM) project is to develop the technologies for the long-duration storage and distribution of cryogenic propellants in support of all Exploration missions. The development of these enabling technologies is crucial for various NASA customers in the Constellation Program including the Lunar Lander, Earth Departure Stage, and Lunar Surface Operations projects as well as for the Mars program.
Status
The scope of the Cryogenic Fluid Management project includes a number of interrelated elements: Long-Duration Propellant Storage, Cryogenic Propellant Distribution System, and Propellant Management Under Low-Gravity Environment. A number of design and test qualification tasks under each of these elements have been defined and are being executed according to the plan in place. The tasks are being performed primarily at various NASA centers—specifically, GRC, MSFC, JSC, ARC, Goddard Space Flight Center (GSFC), and Kennedy Space Center (KSC). The project includes a relatively smaller involvement from external agencies, including universities and small companies. The current TRLs were stated by the NASA team as follows: Propellant Storage—TRL 4, Propellant Distribution—TRL 5, Liquid Acquisition—TRL 4, Mass Gauging—TRL 3. However, based on the current technical maturity, a TRL of 4 for the Propellant Distribution System would be more appropriate.
The plans to achieve the desired TRL of 6 by the PDR of various Constellation elements include a combination of analytical modeling with component and integrated system tests under specified nonspace and simulated space environments. In some cases, such as Mass Gauging systems, a number of competing systems such as the Pressure-Volume-Temperature system, Radiofrequency Gauge, and Optical Mass Gauge are in the process of being evaluated.
Ratings
Quality: Yellow Flag
The CFM project is spearheaded by a very competent group. The involvement of industries and universities appears to be minimal compared with the direct NASA involvement. The analytical modeling work or the subscale-
level testing under a nonspace environment cannot be extrapolated to determine the performance and functions of the full-scale systems under zero- or low-gravity applications.
Effectiveness in Developing and Transitioning: Yellow Flag
A number of technology gaps may have serious consequences for the overall exploration program. Testing subscale or full-scale systems under low gravity is essential in order to demonstrate the applicability of the selected technologies or systems. The achievement of a TRL of 6 or higher before the PDR of various exploration elements may not be realized owing to the lack of these essential tests, mostly caused by funding or scheduling limitations. In some cases, the lack of a fully integrated system test before the flight may lead to undesirable risks. It was mentioned that the Constellation Program Office is evaluating the risks associated with bypassing some of these tests or the eventuality of not achieving the desired TRL 6 by the PDR. This position is in direct conflict with the “Enabling Technologies” designation assigned to the CFM project by the Exploration Program Office. (An “enabling technology” is understood to mean one that must be achieved to enable the success of the mission or an important component of the mission.) However, the committee did not see the absence of achieving a TRL of 6 as a major deficiency if an analysis of the program-level risks, underway at the time of writing, concludes that a TRL of 6 is not required.
Alignment with the Vision for Space Exploration: Yellow Flag
The architectural benefit of using cryogenic propellants in the exploration program is well understood and identified. The selection of LOX/LH2 for the Earth Departure Stage and the Lander Descent Module provides a significant performance benefit compared with other competing propellant systems. However, a number of technical risks associated with the long-duration-in-space storage, propellant distribution, and acquisition remain unresolved. Similarly, the same issues exist for the LOX/CH4 propulsion system that is currently being evaluated for application in the Lander Ascent Module. The lunar surface operations for later and longer missions covering up to 210 days require well-proven technologies for long-term cryogenic storage and fluid transfer between surface assets. However, the relationship and dependencies of the CFM systems and the lunar surface concepts of operations (CONOPS) were not described or presented to the committee. The applicability of the technologies and the design solutions identified for lunar missions to long-duration missions to Mars and beyond were not addressed.
06
ENERGY STORAGE
Objective
The objective of the Energy Storage project is to reduce risks associated with the use of lithium batteries, fuel cells, and regenerative fuel cells for the Lunar Lander, lunar surface systems, EVA, and both Ares I and Ares V. Major deliverables are rechargeable batteries for lander ascent, EVA, and lunar surface mobility; primary fuel cells for lander descent; and regenerative fuel cells for lunar surface power and lunar mobility. Rechargeable batteries and regenerative fuel cells are energy storage devices and cannot by themselves provide all the power needed for long-duration missions; a power source (solar or nuclear) is also needed. The objective is to deliver TRL 5 technologies to Constellation System Requirements Reviews and TRL 6 hardware for their PDRs.
Status
The battery and fuel cell research for the Energy Storage project is being carried out at GRC, the Jet Propulsion Laboratory (JPL), JSC, KSC, and a few university and industrial collaborators and contractors. NASA has very good facilities for both battery and fuel cell research and testing. The project is well coordinated among the NASA centers.
It is not clear if the current performance targets for the Energy Storage project will meet the future mission requirements. Customer requirements are not yet well established but presumably will be much better defined in the future. The present metrics are based on a bottom-up approach and, in lieu of established customer requirements, are appropriate as a temporary measure.
The NASA research effort is quite small compared with that of other agencies and of the battery and fuel cell companies. Consequently, by focusing on issues that are specific to its needs rather than trying to make fundamental advances in the technology, the project will reach its goals more effectively and at lower cost. Some NASA-focused issues include low-temperature operation and lightweight packaging for batteries, and fuel cell technologies that achieve high performance and long-term reliability without the cost constraints of the commercial market.
Ratings
Quality: Fuel Cells: Green Flag; Batteries: Yellow Flag
NASA’s needs for fuel cell development will not be met solely by the commercial market in that NASA’s focus is on mass reduction and the commercial market is focused on cost reduction. Furthermore, NASA fuel cells will operate on H2/O2, whereas commercial products operate on H2/air or gas mixtures (H2, CO2, and so on) derived from the reforming of conventional fossil fuels (e.g., natural gas, propane). The NASA fuel cell team is conducting high-quality research with modest resources. The project is fully cognizant of ongoing work in industry and other agencies and makes good use of related research underway in the broader fuel cell community. The team has benefited from a good investment in research and testing facilities.
Although GRC has a long history in electrochemical technology, the current battery team is in a state of transition, with a new project manager and a new principal investigator. Little evidence was presented to the committee to indicate that the battery work is well coordinated with non-NASA efforts. There appears to be only limited collaboration with DOE and DOD efforts. The battery team’s characterization of the current performance of space-rated batteries as a specific energy of 130 Wh/kg at 30°C at the cell level significantly underestimates the current state of the technology: space-rated cells with specific energies of greater than 165 Wh/kg are currently available from ABSL Space Products, SAFT S.A., and Quallion, although these cells are not yet qualified for human-rated applications. The team has good facilities for research and testing but does not have a capability for fabricating 18650-size cells (18 mm diameter by 65 mm length, a size commonly used in laptops) or larger cells. This indicates a lack of a well-developed plan and/or capability for transitioning NASA’s electrode and electrolyte materials development into full-scale hardware and its subsequent technology insertion into the Constellation Program. However, GRC is conducting a testing program on large cells procured from industrial battery developers, and other NASA centers are conducting a materials development effort in which new materials are tested in very small cells.
Effectiveness in Developing and Transitioning: Fuel Cells: Green Flag; Batteries: Yellow Flag
The current battery and fuel cell technologies used on EVA and the space shuttle are old technologies, and even technologies available today would provide significant performance benefits. The NASA development plan offers the potential for significant improvements over the state of the art, and it is on track to deliver the hardware at the needed TRL at the appropriate time for advanced lithium-ion batteries. However, lithium-sulfur and lithium-metal batteries will probably not reach the required TRLs to meet the Constellation Program’s schedule for the Lander Ascent Vehicle, EVA, and lunar surface mobility. The time line requires TRL 5 hardware for the Lander system requirement review by March 2012 and TRL 6 hardware for the EVA PDR by September 2012. This is due to the combination of the present state of development of lithium-sulfur and lithium-metal batteries and the very low level of planned future resources allocated to their development, particularly in the areas of safety and cycle life. Similarly, while the work on primary fuel cells is nearly on track to meet schedule requirements, that on regenerative fuel cells needs to be accelerated to meet the Constellation Program’s schedule requirements for the lunar surface systems.
NASA’s battery development efforts will have comparatively little impact on advancing the technology except in those areas where NASA’s requirements are unique (e.g., operations at very low temperatures). The multibillion dollar commercial market for lithium batteries will drive advances by industry, and other federal agencies such as DOE and DOD have much larger programs in lithium battery research and development (R&D). A unique feature of the NASA applications is that life requirements are lower, and thus some trade-offs in packaging can be implemented to reduce weight. Extending the operating temperature range of the batteries to extremely low temperatures would also benefit NASA. NASA’s fuel cell development efforts are less dependent on non-NASA research, as the objectives of the commercial fuel cell research are quite different, with its focus on reducing cost and its operation on air rather than oxygen. The regenerative fuel cell being developed by NASA could readily find application as an energy storage medium for terrestrial markets in intermittent renewable energy systems such as wind and solar.
Alignment with the Vision for Space Exploration: Green Flag
The research on battery and fuel cell technologies is well aligned with the VSE, and these technologies are critical to the Constellation requirements. Batteries have been identified as critical for the Lunar Lander and as enabling for EVA and lunar mobility. Primary fuel cells are critical for Lunar Lander power. Regenerative fuel cells have been identified as critical storage systems for Lunar Surface Systems. These technologies are also enabling for the Mars mission. Long-term durability and reliability under extreme conditions (particularly for fuel cells) may be critical for the Mars mission, and accelerated tests to understand durability and reliability issues should be included in the planning.
07
THERMAL CONTROL SYSTEMS
Objective
Nearly all Constellation hardware will require systems to mitigate the extreme temperature conditions encountered in space and on lunar and planetary surfaces. The objective of the Thermal Control Systems (TCS) project is to advance the technology readiness level for critical lunar thermal control system technologies and to mitigate thermal-control-specific Orion risks.
Status
The TCS technologies include a number of different projects underway at several NASA centers. The effort is focused on active thermal control technologies. Passive technologies are not viewed to be part of this project’s area of responsibility. Project elements include fluids, heat acquisition, evaporative heat sinks, radiators, system design and testing, and two-phase systems. To date, the technology efforts have focused almost exclusively on Orion. Over the next 3 years, NASA’s schedule shows that the efforts move more toward the Lunar Lander. Although it was noted that the lunar exploration goal is to land anywhere at any time, the specific efforts are wholly aimed at the initial landing, planned for not more than 7 days at one of the poles. Much of the team that was working in the thermal technology area has transitioned to roles on the Orion program. The current projects include the Orion efforts, which are now moving toward the integrated system test phase and toward early work on the planned Lander tasks.
Ratings
Quality: Yellow Flag
The emphasis of the Thermal Control Systems project is to re-engineer and optimize the existing Apollo systems to reduce their resource requirements (mass and power). Another aim of the effort is to transfer the technical knowledge from the older to the younger generation of engineers through the redesign of the old systems. While these projects will probably be useful to the Constellation Program in reducing mass and complexity, the focus on
incremental technology developments may miss alternative approaches. No overall vision is pushing new directions or looking far into the future. Furthermore, the movement of people off the technology projects and onto the Constellation hardware programs fosters the idea that the ETDP effort is not a technology development program but only an additional engineering resource for the Constellation thermal effort. There is little outside university or national laboratory involvement. Industry support seems to be focused on those companies with existing ties to specific NASA centers. Some supporting examples are given below.
To date, the technology focus of this project has been on active thermal control systems for Orion. One effort is aimed at replacing the old two-fluid (inside and outside) system with a common fluid used in both places. The benefit of this effort is aimed at reducing complexity, allowing common parts and interfaces between systems. The one stated goal of this effort was to generate long-term stability data for potential fluids. This result seems to be more of a supporting engineering role than a developmental one. Also, there is no metric to define whether this approach is actually beneficial to the Constellation Program’s efforts. Suggested metrics to determine if a single-fluid operation is superior to the two-fluid system are long-term fluid stability, system mass, heat rejection rate, power requirements, and cost.
Another goal was to develop a radiator system with at least a 25 percent mass reduction over the present orbiter radiator design. The issue with fluid-loop-coupled radiators is the connection between the metal fluid loop and the low-mass composite radiator. A significant amount of work has been done on composite radiators from a variety of organizations. The effort presented did not seem to build on any of that existing work. It was reported that the Constellation Program had not decided to go ahead with this technology.
It was noted that the thermal technology project is supporting the In Situ Resource Utilization (ISRU) and Robotics efforts because they do not have thermal expertise. Again, while this effort is useful, it is at some level draining resources from one area to support another. The result may be better systems in those areas that appear to need them, but the cost is the lack of development of new thermal technologies.
Finally, the technology effort is focused only on active systems. Passive systems are not part of this area of responsibility. Any longer-term lunar landing effort will need to combine both active and passive systems. The separation of these two fields means that any synergy that could be achieved by combining active and passive systems will be harder to find.
Effectiveness in Developing and Transitioning: Green Flag
The overall technology development effort of the TCS project seems to be well tied in to the Constellation Program. The project has defined objectives that were driven by Constellation’s needs and perceived risks. Customer service agreements (a form of contract between Constellation, which is the customer, and the ETDP, which is the supplier) are in place and being used. The efforts in the technology areas are reviewed frequently by the Constellation team. The detailed schedule for the technology development activities is in line with the Constellation Program’s reviews. Budgets are tracked and funds can be moved from one area to another on a quarterly basis. However, it is difficult to quickly add new organizations into the effort from a contractual perspective, which limits the project’s ability to include new suppliers.
It is difficult to assess how the project will fit into the overall Constellation effort. Most of the technology items discussed are in the early design stage. Milestones for early in 2008 include design and requirements reviews. Design and analysis reports are due later in the year. Project success will eventually be determined on the basis of how those technology items develop. Since the technology efforts tend to be incremental, there is a low risk of the technologies not achieving their objectives—the existing approach is the backup technology. Probably the most important goal is the change from a consumable-based cooling system to a closed system.
From a technology point of view, the project needs to be careful that the technology efforts are not just performing as the feeder team for the hardware programs. Much of the original Orion technology group has moved to hardware roles on the program. This transition of people is good for transferring ownership of the technology to the Constellation Program, but at the cost of losing experience in the technology team. Part of the technology effort needs to look forward at technologies that will change how things can be done. The present effort is almost entirely focused on improving the existing approach.
Alignment with the Vision for Space Exploration: Yellow Flag
The technology development plan of the TCS project is aimed at performance rather than at architectural benefits. A main goal for the elements of the projects is to reduce resources (mass, power, complexity) used by the active thermal control elements on the Orion and Lunar Lander systems.
The technology efforts are hampered by the fact that little work is being done on exploration technologies outside the Constellation Program. The project approaches presented to the committee focus on the Apollo architecture for getting to the Moon and staying there for a short period. The technologies will be of help in updating the Apollo designs for future use, but this inward focus may keep other ideas from surfacing that would support different architectural approaches.
The technologies discussed are specific to the Apollo architecture. Technologies for the lunar outpost and rovers are left to future years. The approach for any long-term habitats, in regions other than the poles, assumes that electrical power will be there to support large-scale heat pumps and cooling systems. Operation in the martian atmosphere and mitigation of long-term dust effects are gaps.
08
HIGH-PERFORMANCE AND RADIATION-HARDENED ELECTRONICS
Objective
The intent of the High-Performance and Radiation-Hardened Electronics (RHESE) project is to advance the current state of the art for radiation-hardened electronics. This is and will always be an issue of significant importance across all elements—with or without a crew—of U.S. space assets.
Status
The RHESE project includes close partnerships between NASA and academia. The project maintains some relationships with the DOD. The RHESE project includes five subprojects: modeling of radiation effects on electronics, single-event-effects-immune reconfigurable field-programmable gate arrays, high-performance processors, reconfigurable computing, and silicon-germanium (SiGe) electronics for extreme environments. The SiGe project has successfully demonstrated technology advances. This project will wrap up in 2009; the high-performance processor and reconfigurable computing projects are expected to ramp up around the same time.
Ratings
Quality: Yellow Flag
Although this work has elements that are quite interesting, and JPL is credibly among the best civilian agencies in the world in this arena, there are significant gaps in the RHESE project team’s knowledge of the state of the art across the panorama of U.S. agencies that conduct work in this area. A number of DOD activities are making significant progress in this field, and NASA will find it useful to make contact with them. The fact that NASA is currently collaborating with the Defense Advanced Research Projects Agency (DARPA) and the Defense Threat Reduction Agency on high-performance processor development was not elaborated on in the presentation to the committee but is hinted at in the project’s documentation. The extent of NASA’s collaboration is unclear with respect to tasking, funding split, and status, and it is uncertain that the project has the best approach to move forward. There is a pressing need for RHESE in NASA’s future missions, both human and robotic; however the roadmap, roles, and responsibilities between DOD and NASA need to be clarified and properly funded.
NASA has world-class researchers in this area, but management does not appear to have a sufficiently strong technical background to appreciate the opportunities for significant advancements in this field. This is an area in which the management of the project should be drawn from field expertise. Failure to resolve this issue is likely to limit NASA’s ability to truly understand the advances being made across all researchers in the United States and abroad in this key area. When these management issues are resolved, NASA will be in a position to determine
how to integrate its knowledge with input from external agencies. In this way, a complete understanding of the combined effects of radiation, thermal, volatile, and particulate environments that will be likely on the Moon can be brought to bear on the design of reliable electronic components.
Effectiveness in Developing and Transitioning: Yellow Flag
Those with experience in the long-term life of critical electronic components and systems in uncrewed systems (NASA has plenty of expertise, especially at JPL as well as at GSFC) know how much likelihood of failure should be allocated to these systems. It does not appear that the highest management levels for the Constellation/Orion missions understand these risks, nor is it even clear that appropriate industrial firms have been involved in risk allocations associated with the long-term functioning of space electronics for these missions. This concern is derived from the lack of concrete requirements, the apparent lack of any reasonable priority (by virtue of extremely low funding levels of some of the subtasks), and the apparent lack of upper management’s incorporation of electronics issues into mission architectures and planning.
An example of the lack of concern is that currently funded R&D teams in this area, as presented to the committee, are not deeply informed about the radiation or volatile environment on the lunar surface—an absolutely necessary prerequisite to the proper modeling of radiation effects on electronics. Radiation-hardened electronics can be an extremely expensive endeavor in terms of both cost and risk—improper design (ill-informed by physical realities) could deeply jeopardize deliverables such as electronics-based systems fabricated with these components, launch schedules, and even missions.
Finally, the work that was presented to the committee would apparently not be closed-loop system tested in a relevant environment, owing in large part to limited buy-in from mission elements. This fact limits the likelihood that these technologies can be validated for flight in time for insertion into mission architectures. Thus the incorporation of novel electronics concepts, such as redundancy and maintainability strategies, into mission architectures is effectively precluded, virtually eliminating any efficiencies that could be built in through more robust electronics.
Alignment with the Vision for Space Exploration: Green Flag
Clearly the work of the RHESE project has enormous applicability to lunar outpost and Mars missions. All of the work being done in its project elements is highly extensible to longer-term missions and to long-duration spaceflight and missions to the surface of Mars.
09
INTEGRATED SYSTEMS HEALTH MANAGEMENT
Objective
Integrated Systems Health Management (ISHM) is a system engineering discipline that addresses the design, development, operation, and life-cycle management of components, subsystems, vehicles, and other operational systems. The primary objectives of ISHM are to maintain nominal system behavior and function and to ensure mission safety and effectiveness under off-nominal conditions. ISHM is an enabling capability for risk mitigation, mission safety, and mission assurance for space exploration. Specifically, ISHM is to provide a systematic methodology to increase ground system availability for Constellation. The project elements presented were as follows:
-
Solid-rocket motor health management, with an add-on proof-of-concept test for NASA that will be accommodated in a flight demonstration on a DOD microsatellite called Tactical Satellite-3;
-
Integrated ground system diagnostics, with infusion into ground support and analyses infrastructure; and
-
In-space, closed-loop, long-duration validation of a complete ISHM system.
Status
The ISHM project plan contains a good analysis of the state of the art outside NASA and has a well-characterized and specific set of objectives. Integration of the objectives into operational missions a still a somewhat ambiguous matter to the committee.
Ratings
Quality: Green Flag
In the ISHM project, mid-TRL historical developments are used, with limited flight demonstrations, to develop flight heritage technologies that can be inserted into the Constellation Program. The technical approaches are solid, if somewhat limited. A good assessment has been made of what is required for the maturation of ISHM technologies such that actual mission program insertion can occur.
Effectiveness in Developing and Transitioning: Yellow Flag
There was no clear visibility for the roadmap and risks associated with the ISHM effort to expand and enhance the limited scope of developments underway to include the addition of new systems and subsystems. This seems, in part, a result of what appears to the committee to be limited buy-in from the customer, despite significant performance parameters assigned to this project for risk reduction in Constellation. For example, a full assessment of failure modes for a complete validation of models was described as needing 20 or so more hot-fire tests of an Ares I that were not included in either the project budgets or time lines.
A roadmap for building the end-to-end ISHM and its integration into the end-to-end flight controls would be a critical element in moving this rating from a yellow to green flag. Also important to effective transitioning would be a more detailed roadmap for flight qualification for the eventual end-to-end model.
Alignment with the Vision for Space Exploration: Green Flag
If effectively developed, integrated, and validated through lunar experience, ISHM technologies will provide critical risk management tools for future missions. Automated system health monitoring and management technologies are well aligned with the VSE, and they are critical to the Constellation requirements. These technologies are also clearly enabling for the Mars mission.
However, if the critical risk management tools are to evolve between now and a Mars mission, NASA is encouraged to look at ways to increase safety (reliability) margins in vehicle design, not simply to improve the control and monitoring software. While this project is clearly aligned with the VSE, the approach may not be complete enough to allow a transition to future elements of the VSE without a great deal more work.
10
AUTONOMY FOR OPERATIONS
Objective
The primary objective of the Autonomy for Operations (A4O) project is to provide software tools to maximize productivity and minimize workload for mission operations by automating procedures, schedules of activities, and plans. The primary customer for the technology is Constellation. The technology will provide mission operations software capabilities for Constellation mission operations, onboard control, crew assistance, and robotics. The key technologies are reusable building blocks, the automation of mission operations functions, and support for human interaction. Current testing opportunities have primarily focused on using data from the International Space Station (ISS).
Status
Non-NASA technology development efforts for procedure automation, software validation, and verification (V&V) currently exist. A4O technology has primarily focused on ISS-based applications, in which the state of the practice is primarily manual (for the construction of command sequences). The current team is composed of ARC, JSC, Langley Research Center (LaRC), and JPL personnel. There are some university and industry partnerships. Deliverables include (1) procedure development environment and procedure automation, with success criteria equating to reduction by a factor of 2 to 10 in the time to create procedures, time to validate procedures, and number of errors; and (2) mission control center, training management, and flight product production automation, with success criteria equating to reduction by a factor of 2 in the time to validate the plan. Software validation is primarily through customer feedback, testing on relevant examples, and shadow-operations—that is, running the software in the background and testing to determine if the outputs match with what the humans did.
Ratings
Quality: Yellow Flag
The A4O technology development is focused on specific NASA objectives (in particular, ISS), yet the project does not provide a coherent picture of how individual software technologies under the A4O project address Constellation Program needs. Although advanced technologies in automation and software V&V currently exist, the project does not seem to build on a requirements or human factors perspective, which has been shown to be a standard practice in this area. It was also not fully shown how key performance metrics used to assess quality of effort will be analytically evaluated or compared to the state of the art in industry.
Effectiveness in Developing and Transitioning: Yellow Flag
The Constellation Program requirements that A4O technology seeks to address include five elements that focus on (1) control of automated functions, (2) fault detection and recovery, (3) integrated mission planning and analysis, (4) concurrent monitoring and control of three active space vehicles, and (5) the capability to return crew to Earth without ground communication. Although the goals of the project are properly outlined, a roadmap to project success is not obvious. In particular, it is unclear how these requirements directly map to the technology products (or stated achievements) that are being developed in the A4O project, or in deriving the key performance metrics for this project.
Infusion points into Orion and Lunar Lander operations are highlighted as milestones, but there is not a clear roadmap for transitioning development from ISS-specific examples to Constellation-specific examples. There seems to be a strong disconnect, or at least a lack of good communications, between the ETDP team and the customer, Constellation.
Alignment with the Vision for Space Exploration: Green Flag
The primary objective of providing software tools to maximize productivity and minimize the workload for mission operations, if achieved, could provide significant benefit toward achieving the VSE. The technology concepts would extend to other exploration missions as well as providing significant performance benefits. To achieve these benefits though, the A4O project needs to focus on getting direct buy-in from the mission operators/astronauts/technology user base.
11
INTELLIGENT SOFTWARE DESIGN
Objective
The Intelligent Software Design (ISD) project is intended to provide the Constellation Program with capabilities to analyze the behavior and support the certification of software-intensive, mission-critical systems over a wide range of nominal and off-nominal scenarios, in a highly automated fashion.
Status
Despite problem areas discussed below, the committee found that, overall, this is a well-conceived and well-planned project to develop model-based software validation and automatic code generation capabilities to decrease the costs of software development and the risks it faces in the Constellation Program. The criticality of autonomous and reconfigurable software design appears to be well understood by the ISD project implementers. It is unclear that flight project managers share this assessment, and this fact is reflected in unclear approaches for validation and testing. All elements—validation testing, autocode verification, model-based analysis, and reliable systems—have top-notch personnel and clearly articulated goals. This project is primarily conducted at NASA, however, with very little involvement of communities outside NASA.
In terms of technology infusion, a lack of clarity is inherent in many of the elements regarding the degree of autonomy needed by the customer versus the cost involved for mitigating risks identified in the Constellation Program and documented in the ISD project plan. This appears to be a function of unclear priorities provided by the Constellation Program for the infusion of these technical advances into the flight program.
Ratings
Quality: Green Flag
The ISD project team has made well-thought-out critical choices for addressing the project objectives and risks within the limitations of the unclear customer requirements. In this case, the team is pursuing a set of tools for reducing cost and risks in the complex mission-critical software systems required for Constellation. The team is aware of the risks that is faces. There are gaps in the program that the team is aware of but cannot address owing to cost issues. This is a well-balanced and appropriately focused program. The members of the team were very seasoned and experienced.
To a reasonable extent, the project takes advantage of commercial (non-NASA) work that is open source or what can credibly be called commercial off-the-shelf technology. The project could benefit from the additional involvement of universities and others in investigating the application of commercial concepts that would be considered low TRL because they have not been fully applied to a crewed space endeavor.
Effectiveness in Developing and Transitioning: Yellow Flag
The ISD project is subject to an aggressive schedule, and although the schedule is feasible, funding limits the probability of this project achieving its full goals in the time frame presented to the committee. Exacerbating the scheduling problem is the fact that no credible plans to fully test and verify the advances were presented to the committee. Currently, no subproject technologies are yet human-qualified. In general, although this would not be impossible to achieve, it is unclear how transition to TRL 6 will be successfully accomplished. Nevertheless, the present status does not threaten the success of the overall program.
Alignment with the Vision for Space Exploration: Green Flag
The benefit of this project to both lunar and Mars exploration is well aligned with the goals of the VSE. These technological advances, given the virtual guarantee that mission software will increase in complexity and requirements for reliability, will all be enabling for a Mars mission as well as the lunar mission.
12
AUTONOMOUS LANDING AND HAZARD AVOIDANCE TECHNOLOGY
Objective
The primary objective of the Autonomous Landing and Hazard Avoidance Technology (ALHAT) project is to develop and mature various hardware and software components that will aid lunar descent vehicles. Overall, the goal is for the system to enable safe, accurate, and precise landing near selected landing sites anywhere on the lunar surface unaided by humans. The primary customer for the technology is the Lunar Lander Projects Office.
Status
The technology that the ALHAT project develops includes hardware and software components. Some of the hardware components are locally developed sensors such as flash lidar (Light Detection and Ranging), scanning lidar, optical Doppler lidar, and cameras, whereas other components are commercially available sensors (inertial motion units, star trackers, and altimeters). The software components include algorithms to convert sensor data to vehicle-state information, algorithms that aid vehicle flight, and guidance and navigation algorithms. The TRL for the overall system varies. Some sensors can be considered to be at TRL 3 or 4 (flash lidar), whereas others have flown in space but have not been employed for lunar landing scenarios (scanning lidar). The algorithms range from TRL 3 to TRL 5. The current team is composed of personnel from JSC, LaRC, JPL, the Charles Stark Draper Laboratory, and Johns Hopkins University Applied Physics Laboratory. Moreover, there is some university and industry involvement (by the University of Texas at Austin, Utah State University, Jacobs Engineering Group, Inc., and Fastmetrix, Inc.).
Ratings
Quality: Gold Star
The quality of the NASA development effort on the ALHAT project is high. The team has the experience and expertise to carry out the technology development. Moreover, the team is working in a tightly coordinated manner. It has reported several major accomplishments and significant findings, ranging in scope from technical achievements, to vendor site visits, to written operation concept reports, to independent reviews of the ALHAT project.
The team has recognized several technology areas that had not previously been identified. These include a need for sensors that can provide real-time elevation maps of terrain during descent; a need to increase and improve the operational range, accuracy, and resolution of flash lidar; and a need for a velocimeter that can provide accurate and precise horizontal velocity measurements. It is noteworthy that the team has identified these gaps and plans to address each one by the Lunar Lander PDR in the year 2011.
The broader community is involved in this project; however, there is room for additional involvement. Facilities at LaRC, JPL, and JSC are being used and are adequate to advance to TRL 5. Achieving TRL 6 will require free-flier tests.
Effectiveness in Developing and Transitioning: Green Flag
The technology roadmap for the ALHAT project shows a systems engineering approach to problem solving. Continued development of hardware and software technology is planned, with significant milestones set for June
and September 2008. Technology testing and integration are ongoing, and will become the primary activity of the project in 2009 and beyond. The schedule shows ALHAT validation (TRL 5) in 2010. The technology transition plan shows that the ALHAT project will be infused into the Lunar Lander Projects Office by 2011. Moreover, tests on a free-flying test vehicle could provide TRL 6 prior to Lunar Lander FDR. The committee voiced some concern as to whether adequate consideration has been given to testing requirements that will take this technology to an integration stage such that TRL 6 is actually achievable within the time frame specified.
The schedule risks appear to be acceptable, and there appear to be no high-risk technology obstacles to the project.
Alignment with the Vision for Space Exploration: Green Flag
Overall, the ALHAT project is well aligned with the needs of the Lunar Lander Projects Office. The technology benefits the Constellation architecture and several elements of the VSE beyond the Constellation Program. The technologies and techniques appear to have an architectural benefit in that the methods will be applicable to any spacecraft landing on planetary surfaces. The approaches are aimed at having a high likelihood of success while minimizing risks and costs.
13
AUTOMATED RENDEZVOUS AND DOCKING SENSOR TECHNOLOGY
Objective
The primary objective of the Automated Rendezvous and Docking Sensor Technology (AR&DST) project is to reduce risk associated with relative navigation sensors for proximity operations and docking through development, testing, and simulation. The primary customer for the technology is the Orion project, but it is important to the Altair Lunar Lander as well as to future Exploration activities.
Status
The technology developed in this project will provide a vision navigation sensor (or suite of sensors) to aid rendezvous, proximity operations, and docking. The sensor(s) shall have an operational range that spans from 5 km to dock. The current effort is focused on the Natural Feature Image Recognition (NFIR) technique, the Next Generation Advanced Video Guidance Sensor (NGAVGS), and simulation and testing. The Orion program is in the process of a contractor-led AR&D sensor procurement, Vision Navigation Sensor (VNS), of its own that did not include NFIR or NGAVGS by definition, so the transition of this technology to the primary customer is unclear. It appears that the development status of both the NFIR and the NGAVGS is near TRL 5. It is important to mention that the predecessor to the NGAVGS, the Advanced Video Guidance Sensor (AVGS), was operational in some space flight testing on Orbital Express and the Demonstration of Autonomous Rendezvous Technology mission (TRL 7 to 8 was achieved), and therefore some elements of the NGAVGS may claim a higher TRL.
It is known that non-NASA technology development efforts for AR&D sensors are underway, but it appears that these techniques are not being strongly considered within the AR&DST project. Some of this is due to International Traffic in Arms Regulations concerns since this is a significant area of work outside the United States. The current team is composed of JSC, MSFC, and JPL personnel. There are no university or industry partnerships except for two recently selected SBIR projects.
Ratings
Quality: Yellow Flag
Critically, other non-NASA efforts may be extremely relevant to the Automated Rendezvous and Docking Sensor Technology project. The absence of university or industry partnerships suggests that these non-NASA potential solutions may be being overlooked.
It is unclear how the team plans to objectively and directly benchmark the NGAVGS and NFIR techniques and how the VNS, the Orion-procured sensor, will fit into the mix. Alternatives being developed outside NASA also may have a role in this objective comparison.
A mix of testing facilities exists within NASA (JSC and MSFC), at contractors, and within the DOD (Naval Research Laboratory). The plan by which all of these capabilities will be fully utilized is unclear since the focus by the NASA presenters addressing the committee was on JSC. The team did mention that it plans to revisit the testing plan to look at this wider set of facilities. Also, in the simulation area it does not appear that previous work both within and outside NASA was being fully utilized, since it was stated that the team is largely developing its own simulations at JSC.
Effectiveness in Developing and Transitioning: Yellow Flag
The project’s technology roadmap shows the continued development of NFIR and NGAVGS on parallel paths to 2010, with technology enhancements to support Orion from 2009 to 2012. Simulation and testing end after 2008, which appears to be a disconnect with continued NFIR and NGAVGS development unless it is assumed that Orion picks up this work. In 2011 Lunar Optical Navigation and technology enhancements begin funding to support the Altair Lunar Lander.
Since this project is only focused on the AR&D sensors rather than on the whole AR&D problem, it lacks a systems engineering approach to solving the problem and largely appears to be responding only to Orion requirements, many of which focus solely on the ISS mission. The sensor technology transition is scheduled for the summer of 2008 and will occur before the Orion PDR, which was moved from May 2008 to September 2008.
Many of the technology risks are associated with meeting the minimum range, maximum range, and frequency requirements. It is noteworthy that four of the five top project risks are ranked as high-likelihood, high-consequence risks. Risk management approaches are mentioned, but the technology development will need to be closely monitored and scrutinized.
Alignment with the Vision for Space Exploration: Yellow Flag
AR&D is often cited as a critical technology needed to support the VSE in the near term for Orion’s mission to the ISS, in the mid-term for the Altair Lunar Lander, and in the long term for future Mars architectures. That is why it is especially important that a holistic, systematic approach be taken to this technology. This project appears to the committee to suffer from a somewhat myopic focus on solely near-term needs for the Orion-to-ISS mission and on the sensors alone. This approach is likely to result in technologies that do not support the VSE as a whole and that penalize future elements.
14
EXPLORATION LIFE SUPPORT
Objective
The objective of the Exploration Life Support (ELS) project is to develop and mature life support system technologies that meet mission requirements approximately 6 years before flight or occupancy of the various elements of the Constellation Program such as the Crew Exploration Vehicle (Orion), Lunar Lander, Lunar Habitat, and the pressurized rovers. The technologies selected cover Air Revitalization Systems, Waste Management Systems, Water Recovery Systems, and Habitation Engineering.
Status
In the ELS project, critical technologies have been defined, responsibilities have been assigned to a large number of NASA centers, and grants and cooperative agreements have been established with non-NASA and non-U.S. organizations. In general, a great deal of this work is being developed and executed in-house, with little
explicit reference to knowledge outside NASA. The committee was advised that at one time there had been considerable collaboration with universities and other cooperative agreements but that these collaborations had all been terminated recently, primarily because of budget reductions. The research scope has also been impacted with the elimination of biological research related to plant and microbe growth, which had been part of the “closed loop life support” strategy followed for several decades previously (e.g., Controlled Ecological Life Support System, or CELSS). Without the fractional gravity research into plant growth and without the quantification of other variables, it is not clear how the life support loop will be closed. It was also unclear whether or not the research plan had been coordinated with the design reference missions for resupply to either lunar or Mars bases. The design reference missions assumed a reduction in costs due to resupply requirements by utilizing CELSS technologies.
In terms of requirements and risk mitigations, this project plan is less definitive than many others in the ETDP portfolio, and there is no clear roadmap for transition from technology development to infusion into final flight hardware.
Ratings
Quality: Yellow Flag
The ELS team is very capable. In general, the selected technologies (Air Revitalization Systems, Waste Management Systems, Water Recovery Systems, and Habitation Engineering) appear to provide good approaches to significant performance and architectural benefits, but very few data based on comprehensive system engineering were presented to the committee to quantify these benefits. This is a very NASA-centric set of efforts that may benefit from broader involvement with communities outside NASA, interactions that had existed at one time but which were terminated because of budget reductions in recent years. Although the project elements are reasonable across the board, there appears to be no substantial innovation here. No early-stage research will be done to bring in innovation. The lack of understanding of the lunar dust environment is a major concern. This area, along with particulate mitigation, causes concern because it is unclear that the technology being developed will be flexible enough to accommodate the needs for the lunar environment once those needs are better understood. The impact of failure to achieve the required technology readiness level by the Constellation Program target dates was not assessed or quantified. The dependencies of the ELS on other subsystems have been identified, but the impact of these dependencies on the overall system-level architecture has not been quantified.
Effectiveness in Developing and Transitioning: Yellow Flag
The risks associated with the potential inability of the ELS project to achieve TRL 6 by the dates needed for the Constellation Program were not articulated. In some areas, funding limitations are highly likely to lead to a level of maturity lower than that required for successful infusion into the vehicles. The required maturity level needs to be established on the basis of Constellation requirements rather than of “available funding” or “customer negotiations,” as stated in the project’s technology transition plan.
The overriding issue is the timely maturation and qualification of the technologies for infusion into the various vehicles with an acceptable level of adverse impact on the vehicle configuration in terms of mass, power, consumables, or CONOPS in terms of heat rejection requirements, reduced resupply, hygiene and housekeeping, and crew time.
Alignment with the Vision for Space Exploration: Yellow Flag
ELS technologies will clearly have major impacts on risk mitigation for long-duration missions such as the lunar outpost missions and Mars missions. The extensibility of the ELS project to Mars missions, CONOPS on the surface of the Moon or Mars, and specific planetary protocols regarding matters such as atmospheric pollution were not explained or presented to the committee even though “Moon as a Test Bed for Mars” and “Planetary Protection” were listed as benefits of the ELS project. Consequently, the alignment of the ELS project with the
VSE is tenuous at best, and little information was provided relative to the additional risks associated with longer-term missions.
15
ADVANCED ENVIRONMENTAL MONITORING AND CONTROL
Objective
The goal of the Advanced Environmental Monitoring and Control project is to develop and provide environmental monitoring and control systems for future crewed NASA vehicles and lunar habitats. As part of that development, the project will take advantage of testbed opportunities such as the ISS to gain knowledge and experience with respect to the operation of monitoring and control in space and to use that knowledge and experience to reduce risk. Four specific project elements were reviewed: the Vehicle Cabin Atmosphere Monitor (VCAM), Electronic Nose (ENose), Colorimetric Solid Phase Extraction (CSPE), and Lab-on-a-Chip Application Development (LOCAD).
Status
JPL is developing and will qualify and deliver in late 2008 the VCAM, an air-quality monitoring analytical instrument capable of measuring both targeted and unknown trace gases at parts-per-million to parts-per-billion levels. The Laboratory Standard version of the VCAM is being tested on the ground, detecting simulated mixtures of what would be seen in flight, and it is currently at TRL 5. The VCAM will be operated autonomously once a day, and its measurements of species identities and concentrations will be telemetered to the ground. The project team has been implementing a modular, staged approach, starting with the mass spectrometer for the CEV, then adding the gas chromatograph for the CEV/Lunar Lander Vehicle, then, finally, a full system for lunar outpost and Mars missions.
The ENose uses an array of semiselective chemical sensors. The response of the array can be considered a “fingerprint,” which is deconvolved for both identification and quantification. The device, which NASA stated is at TRL 6 regarding its application to the ISS, runs continuously and autonomously.
The CSPE instrument is currently designed to monitor trace analytes in drinking water; its goals address the needs of the space program for analytical instruments and methodologies that (1) meet the monitoring requirements of ISS and space shuttle missions, (2) acquire the analytical data necessary for further defining the critical monitoring requirements for crew health and safety in future missions, and (3) serve as a platform for the development of the analytical methods and ancillary hardware for the projected monitoring requirements for the lunar, Mars, and other VSE missions. The status of the CSPE instrument, according to NASA, is TRL 4+, and it has already been used in microgravity testing.
The LOCAD integrates microfluidics and microarray technology to assess microorganisms, initially on ISS surfaces and later on future crewed missions. The LOCAD team and its partners are developing chips and a hand-held unit to perform the analyses. The LOCAD Portable Test System will be used by the crew to perform rapid (within minutes) assessments, and the results will be compared with those of the commonly employed method of plate culturing (~3 days for analysis). Cartridges for gram-negative bacteria are already onboard ISS, and work is currently being done to send up cartridges for the detection of yeast and mold and for gram-positive bacteria. This will allow for a complete characterization of the ISS microbial environment. Work is also underway to develop more advanced readers and swabbing tools to better meet future Constellation needs. At the same time, the LOCAD team is having discussions with the exploration medical research community and other Constellation projects to further define requirements for technology development.
Ratings
Quality: Green Flag for All Project Elements Except LOCAD; Red Flag for LOCAD
No new science is being proposed or discovered on the VCAM; it is an instrumentation effort. The work at the JPL is based on previous flight-qualified instrumentation. The VCAM team is well qualified and understands
how to tailor the instrument to meet NASA’s deliverables. The ENose team is experienced and qualified, but external experts and field trials would very likely strengthen the team and provide confidence in its performance. The CSPE project element has a sufficiently broad, non-NASA-based team, with all the capabilities that are needed. It uses a conceptually straightforward approach to monitoring trace chemicals in drinking water. It is largely an instrumentation engineering problem, and the team has implemented an approach that has produced prototypes that are physically robust, including testing in short-duration microgravity use aboard a C-9 aircraft.
Regarding the LOCAD, application of microfluidics to microbial assays is not a new concept. NASA would have done much better investing in existing industry-developed microbial detection and identification technologies rather than spending so many of its resources internally. As a general remark, the committee believes that the entire LOCAD element would benefit from external peer review, both for the process of rewarding R&D funds and for reviews of ongoing projects. While the definition of a red flag does not apply, strictly speaking, to this case in that the success of the mission has not been threatened, the committee believes that the project as presented was far behind the state of the art.
Effectiveness in Developing and Transitioning: Green Flag for All Projects Except LOCAD; Red Flag for LOCAD
The VCAM project element is staged, as described above, and can fall back to a lower-performance version with fewer modules if full integration of all three modules proves to be intractable for a flight-qualified system. JPL has delivered flight-qualified instruments to NASA in the past, but this system is more complicated. Previous generations of the ENose have been flown, and performance continues to improve. No particular risks were noted by the committee, but non-NASA research in this field should be evaluated for possible improvements to the NASA instrument. The CSPE project element is expected to be at TRL 6 by August 2009. Prototypes that have been designed and operated have performed well.
Because the LOCAD team did not involve external members who were working at the state of the art, insufficient time remains for incorporating state-of-the-art assays and technologies. The implementation path, thus far, is deficient. While strictly speaking the definition of a red flag does not apply to this case in that the success of the mission has not been threatened, the committee believed that the project element could have been significantly better accomplished and at lower cost if industry expertise had been incorporated at an early stage.
Alignment with the Vision for Space Exploration: Green Flag
If integration of the VCAM modules is successful and able to distinguish methanol from atmospheric oxygen, it could possibly replace the volatile organic monitor and the Analyzing Interferometer for Ambient Air. Certain lifetime issues will have to be addressed if use on a Mars mission is considered. The ENose, if it were coupled well to the VCAM, could replace larger, heavier units. Any crewed mission would in principle benefit from such a continuously operating, sensitive event detector. The CSPE project element has value and usefulness for maintaining astronaut health, independent of flight architecture for crewed missions. The LOCAD is a valid concept, and its development will be beneficial to the VSE.
16
FIRE PREVENTION, DETECTION, AND SUPPRESSION
Objective
In support of the VSE, NASA has launched a Fire Prevention, Detection, and Suppression (FPDS) project with the objective of developing “technologies that will ensure crew health and safety on exploration missions by (1) reducing the likelihood of a fire, or (2) if one does occur, minimizing the risk to the crew, mission, or system.”6
The FPDS project is aimed at determining the flammability of proposed materials in exploration-type environments, developing advanced fire detection systems capable of making measurements of low-gravity fire signatures (e.g., Smoke Aerosol Measurement Experiment, SAME), developing models of smoke dispersion in an exploration-type environment, and developing fire extinguishers (e.g., the portable, fine-water mist fire extinguisher).
Status
NASA has long had requirements and conducted research relating to the prevention, detection, and suppression of fires. The Apollo 1 fire was a dramatic reminder of the dangers of fire around spacecraft. More recently, the Russians had a potentially catastrophic fire aboard their Mir Space Station.
NASA’s plan is focused on the three major elements: prevention, detection, and suppression. A multi-organizational team (including universities) is involved in this project. SBIR grants are being leveraged in the development of technologies such as the portable, fine-water mist fire extinguisher.
Regarding fire prevention, NASA has a flammability test that materials must pass. If a material does not pass “Test 1” (upward flame spread test), the material must undergo additional testing or be reviewed by materials and processes personnel. Moreover, NASA strives to minimize ignition sources.
The current fire detection system on the ISS employs smoke detectors based on photoelectric technology, positioned near air return vents. To extinguish fires, the ISS has carbon dioxide fire extinguishers. For the Constellation Program, the requirement is that exploration vehicles (e.g., Crew Exploration Vehicle, Lunar Lander, and Outpost) have fire detection and suppression capability. NASA has identified gaps in knowledge about fire propagation, detection, and suppression in low-gravity environments.
This project performs applied research on reducing the risk of fire in a zero-gravity or less than 1-gravity environment. Most of the work is to determine the flammability of materials in these environments and to detect fire.
Some activity was dedicated to suppression. Most of the activity was directed at the space transportation element of the exploration program, microgravity, with a minor amount focused on the Moon or Mars environments.
This project includes substantial cooperation with non-NASA organizations, including the Naval Research Laboratory, the National Institute of Standards and Technology, the Colorado School of Mines, Ohio State University, Case Western Reserve, and several contractors. Contacts with the U.S. Nuclear Regulatory Commission and the U.S. Air Force might prove useful. There is not a competitive industry for this research outside NASA. However, the certification of materials to characterize their ability to fly in space is conducted at MSFC and at the White Sands Missile Range. It was stated that neither MSFC nor the White Sands Missile Range performs the technology development tasks that the FPDS project at GRC does.
Ratings
Quality: Green Flag
The FPDS project is a reasonably well balanced and appropriately funded program at present, but the proposed future funding profile does not bode well for its continuance. The members of the team are very seasoned and experienced.
While, like every effort, the project is fiscally restrained from doing all that the project team would like to do, the team is making significant contributions and the facilities available seem adequate for the task.
Effectiveness in Developing and Transitioning: Yellow Flag
The GRC team identified potential problems in having sufficient personnel to properly infuse the technology developed if skilled machinists continue to be focused on other activities (e.g., Ares I project). While progress on the research is being made, declining budgets will eventually diminish overall results and lead to a loss of experienced personnel. In particular, there will be a loss of funding in 2013, just when some Exploration systems will be coming online. Moreover, it was reported that no fire suppression research is currently being funded.
Alignment with the Vision for Space Exploration: Green Flag
The FPDS project is well connected to its customers because fire prevention, detection, and suppression will remain important subjects in all missions envisioned in the VSE. However, the technology is not highly rated on the needs scale because it has already been pursued for several years on the space shuttle and the ISS, and the knowledge is advanced. This work seems to entail an ongoing process that incrementally adds to the knowledge base with no critical point at which it must be completed.
Due to the emphasis on the zero- and low-gravity nature of the application, this is a “NASA-only” technology with no outside effort, except for NASA contracts, to sustain it. It is a pay-as-you-go activity that primarily serves only one mission: human spaceflight.
17
EXTRAVEHICULAR ACTIVITY TECHNOLOGIES
Objective
The capability for humans to work on the lunar surface is a required component of the lunar mission architecture. EVA technologies, including life support systems, suit materials, anthropometric optimization, power systems, and data systems, are critical technologies that will enable humans to walk and work on the surface of the Moon and Mars. The Constellation Program EVA Systems project, in conjunction with the ETDP, will develop these required technologies, which will be grouped by the following suit systems: Pressure Garment; Life Support; and Power, Communications, Avionics, and Informatics (PCAI) systems.
Status
Presentations to the committee on the EVA suit technology deferred critical systems, such as the Pressure Garment, to the Constellation Program with no clear identification of the developers, the state of research, the responsible party for final oversight of the system, the TRL of the integrated system, risk assessment, and so on. There did not appear to be an adequate transfer of decades of knowledge and operational-technical experience into the new suit development with respect to the relationship between anthropometric design and scaling of systems. For example, without the periodic exchange of this information, it is possible that the independent design of the subsystems could drive the anthropometric design of the suit, rather than the human operational requirements, or that there could be other incompatibilities, thereby significantly degrading both lunar and Mars surface operations. Additionally, the involvement of low-TRL research from universities seemed largely absent.
Ratings
Quality: Yellow Flag
All the elements of the EVA Technologies project have appropriate utility, and the objectives are well understood. The project team has a good mix of experience and energy, and the enthusiasm for the effort points to good execution. Very few breakthrough technologies or innovations were considered or presented to the committee. The following comments are made with regard to various subprojects:
-
The packaging effort for the Portable Life Support System (PLSS) should seek expertise in penetration and shock protection that exists outside NASA—a physical test-based program by itself will not achieve the packaging and weight-reduction goals. Collaboration with ergonomic and human factors experts would sharpen the weight reduction goals.
-
Suit Water Membrane Evaporator technology is developed from previous NASA research and is sound, but it offers no breakthroughs.
-
Rapid Cycle Amine: there is a need for better understanding of toxicity issues.
-
Metabolic Temperature Swing Absorption was identified through a competitive procurement process. Company independent research and development funds have taken this technology to a TRL of 3. It is questionable whether this project element can be developed mainly through SBIR funding.
-
The utility of the variable-pressure regulator is very novel and useful for the VSE, a great innovation. The current plan seems achievable, but this was one of the lowest TRL elements shown.
-
The communications radiation-hardening effort would benefit from increased contacts with industry and the DOD laboratories to achieve its goals.
-
The PCAI team has developed useful contacts with the DOD in the areas of audio communications, batteries, displays, and speech recognition that should prove beneficial.
Effectiveness in Developing and Transitioning: Yellow Flag
Resource limitations and disparate development organizations (not identified on a single project element chart) negatively impact the EVA Technologies project. An integrated EVA team (PLSS and suit) would focus goals and result in better alignment than that achieved by the current, arbitrarily separated pressure suit effort. The lack of long-term funding and an unclear alignment between the ETDP, the Constellation Program, and the Space and Life Sciences Directorate at JSC that defines the human risks and suit design requirements present a substantial risk to this critical element of future planetary surface exploration effort. No new technologies or design concepts to mitigate the locomotion and mobility issues that will arise during lunar and Mars surface exploration missions were apparent during the committee’s visit to the EVA Suit Laboratory. There was no new materials or systems research presented to address the significant abrasion and dust mitigation problems that will be encountered in the lunar regolith or on the surface of Mars. An environmental facility simulating as closely as possible lunar and/or Mars conditions, including the abrasive lunar regolith or martian soils, could lead to a significant reduction in the risks associated with long-term exploration on the surface of the Moon.
Gaps in the efforts include (1) a fully nested analysis effort to optimize the protection, weight, and sizing of the PLSS; (2) incorporation of radiation protection within the suit elements; (3) identification of new heat-rejection technologies, including both passive and active systems such as new materials for the suit, new phase-change materials, and alternative designs for the present cooling garment; (4) lack of obvious integration of the anthropometric requirements for crew selection with the anthropometric optimization of suit design (relevant HRP risks and lessons learned from past programs using either custom suits, one size fits all, or a small selection of standard sizes should be shared with designers starting at TRL 1); and (5) consideration for integrating advanced technologies into the overall system, rather than relying solely on incremental improvements. In addition, a study of the recent request for proposals (RFP) for the new Constellation suit indicates that the effort will be directed to a single suit for Earth launch to orbit, EVA on orbit, and lunar planetary operations. The RFP further stated that the contractor selected would not be required to initiate new technology research but would be expected to increase the TRL level of NASA-initiated research. This new suit may require research and technologies that are not currently identified within the existing program.
Alignment with the Vision for Space Exploration: Yellow Flag
The benefit of EVA systems is obvious within the VSE; not providing the enabling EVA systems on time and within requirements will jeopardize mission success. The current effort is directed toward general EVA and Lunar Surface Operations. However, the current program and the EVA suit RFP mentioned above explicitly excluded development of a suit for use on the surface of Mars.
18
INTERNATIONAL SPACE STATION RESEARCH
Objective
The International Space Station research project is broadly divided into two elements: direct exploration support and more general microgravity/radiation research. Both elements span the physical and life sciences.
The goal of the exploration element is to employ the ISS as a low-TRL testbed to bring technologies to higher TRLs in the areas of life support, fire safety, power, propulsion, thermal management, material technology, habitat design, and so on.
The goal of the non-exploration element is to sustain U.S. scientific expertise and research capabilities in fundamental microgravity research, primarily in the life and physical sciences. The U.S. Congress mandated the allocation of at least 15 percent of ISS research to ground-based, free-flier, and ISS life and microgravity science research that is not directly related to supporting the human exploration program.
Status
Nearly all exploration-related tasks are research projects onboard the ISS, with a few being ground-based research. All currently funded tasks are carryovers from the original ISS program with a budget that was many times larger in 2005. Some are onboard ISS and some are scheduled to be delivered by the space shuttle or Soyuz up to early 2009. NASA’s briefing charts indicate a funding profile of one U.S. research experiment per rack every 2 years.
Ratings
Quality: Green Flag
The ISS research projects will support the following test facilities: Microgravity Science Glovebox (On-Orbit), a Fluids and Combustion Facility, and a Materials Science Research Rack in the ISS National Laboratory. The latter two will be launched in the next 2 years. Because they are in use or qualified to be used in the ISS, the test facilities have met the stringent operational and safety requirements imposed by the ISS.
The ISS Research projects have met some of the National Research Council (NRC) recommendations related to the following:
-
Effects of radiation on biological systems,
-
Loss of bone and muscle mass during spaceflight,
-
Psychosocial and behavioral risks of long-term space missions,
-
Individual variability in mitigating a medical/biological risk,
-
Fire safety aboard spacecraft, and
-
Multiphase flow and heat transfer issues in space technology operations.
Four foundational research efforts have relevance to Exploration:
-
Smoke and Aerosol Measurement Experiment to help design a useful spacecraft smoke detector,
-
Microbe by way of virulence in a rodent infection model might be applicable to human spaceflight,
-
Zero Boil Off Tank (ZBOT) Experiment for spacecraft tanks, and
-
Vegetable Production Unit (VPU) to study space growth of plant species and their supporting equipments, along with assessment of crew member reactions.
These projects would satisfy NRC recommendations related to items 3, 5, and 6 listed above.
There are 8 other exploration research efforts related to physical sciences including fluid physics and combustion science that are led by university professors and researchers from Glenn Research Center. There are 17 other non-exploratory efforts related to physical sciences including fluid physics, combustion sciences, material sciences, and acceleration environment characterization. The principal investigators are mostly university professors. The quality of the research is considered to be very good and is presumed to have been subjected to the NASA peer review process.
Effectiveness in Developing and Transitioning: Yellow Flag
Since most experiments are performed on the ISS in a microgravity environment, they cannot address the fractional gravity application on lunar or Mars surfaces. They can, however, address technology needs for the vehicle transit, assuming a constant microgravity environment. It should be noted that since the Cryogenic Fluid Management project in ETDP cannot validate its technology in microgravity or fractional gravity owing to project costs and schedule requirements, it may not be able to use results from the ISS experiments to support the Constellation Program’s development. This is an example of a disconnect or gap that exists between the ISS research and ETDP’s customers.
Before each project is launched to the ISS, it has to be assigned a manifest position in the shuttle or the Soyuz cargo manifest. Months of integration are also required before each flight. Therefore, the committee assigned a yellow flag to most of these ISS research projects because it appears that they cannot meet the schedule requirements of the ETDP. The ISS collection of experiments is generally at the lower TRL levels, performed primarily by the university community. The transition of results is an indirect one, through conference papers and reports. There appears to be no regular communication between the ISS research project and other ETDP projects.
Alignment with the Vision for Space Exploration: Yellow Flag
The Exploratory Research Program on the ISS consists of projects that are at or below TRL 3. Therefore, they do not yet meet Constellation’s needs. The relevancy of such projects is based on endorsement letters from other ETDP projects. The logic is that these research projects may be successfully picked up for further TRL development in future ETDP projects.
However, most projects are carryovers from previous ISS projects and use facilities onboard the ISS. The pool of investigators is from the original ISS research community, and the selection is based on the ISS project’s own interpretation of exploration needs rather than the other way around. Thus, there appears to be a gap between research projects and other ETDP customers such as Constellation. Nonetheless, the projects listed above represent valid scientific research and can be considered to align with future Mars Exploration missions, but the possible application of results toward Constellation is not clear. NASA, in general, should continue a robust utilization of the ISS for both scientific and engineering research to support exploration and mitigate risk, and then it should ensure that those experiments ready for transition into either lunar or martian exploration are put on a clear project path for systems integration.
19
IN SITU RESOURCE UTILIZATION
Objective
The basic concept of In Situ Resource Utilization (ISRU) is to extract elements and minerals from the land and/or atmospheric resources that are present on the Moon and Mars. The idea of “living off the land” has been investigated for the past two decades. The proposed benefits argue that each kilogram of material that is produced on the Moon or Mars saves funds, launch mass, acquisition time, and payload volume. At roughly $100,000 per kilogram to put material on the Moon, these savings have been shown to be considerable. In addition, by producing needed materials at the base, the crew has an increased chance of dealing with unforeseen emergencies.
The near-term goal is to produce oxygen from lunar regolith for life support at about 1 metric ton per year. The midrange goal is to produce about 10 metric tons per year to refuel the propellant tanks on the ascent vehicle. The long-range goal is to use the extracted metals for fabrication of parts.
Status
The ISRU project will demonstrate regolith excavation and transport by both large and small rovers in analog environments. Oxygen production from regolith is to be demonstrated on the scale of an outpost-scaled plant. A precursor demonstration is being developed. It is hoped that this demonstration can be flown through a partner-
ship with Europe, Japan, or India. There is also some support work, in the form of modeling, regolith simulant development, and facility identification. There are some collaborative programs with the Canadian and Japanese space agencies, and limited procurements from industry and academia.
Ratings
Quality: Green Flag
The various elements of the ISRU project appear to have high quality in both development path layout and the knowledge and abilities of the participants. The project has made good use of the expertise at all relevant NASA research centers and works in a well-coordinated manner. This project has also involved several universities and a few industries. The ISRU technology roadmap is closely linked to the NASA Science Mission Directorate and has a good link to NASA’s life support development activities. However, the planning between the NASA Exploration Systems Mission Directorate’s Lunar Lander Project Office and the ISRU activities is not currently well coordinated enough.
According to the NASA presenters, the TRLs of most of the elements of the ISRU project are about 3, with some concepts around 2. The effort could benefit from the involvement of more universities and others in investigating new concepts at TRLs of 1 or 2.
An important issue to be resolved is whether the implementation of the equipment needed to produce materials from the lunar regolith would cost more than the savings offered by producing the material on-site.
To the extent possible, the project has taken full advantage of related non-NASA work in an ancillary manner—that is, not as part of the critical path to achieving the project’s goals. An example is the project’s drawing on advances in mining technology developed by the Canadians.
Effectiveness in Developing and Transitioning: Red Flag
The risks in achieving the ISRU project’s goals are very high due to insufficient resources: SBIR support will not solve this problem within the necessary time frame for implementation, and relying on foreign partners to maintain this project is problematic. In addition, this project is different from most of the ETDP projects as it has no Apollo experience to build on, and without another application in a commercial market there is no non-NASA entity to develop the technology.
The committee has identified three technology gaps that inhibit the effectiveness of the ISRU project:
-
High-fidelity lunar environment testbed. The lunar environment is a hard vacuum, has large temperature swings, is very dry, and possesses a layer of fine, abrasive dust. All of these conditions may strongly impact the performance or lifetime of robotic systems, mobile transports, heat radiators, and human respiration. Except for gravity, these conditions can be duplicated on Earth to validate the performance of candidate systems and operations. In addition to environmental testing, there are currently technology gaps due to funding limitations in lunar soil stabilization studies and operations/control software for startup/operation/shutdown in the low gravity, vacuum, dust, and lunar thermal cycles. NASA’s program lacks a facility that duplicates the dusty environment, vacuum, and thermal cycles of the Moon. Without such testing, no quantification of lifetime margins is possible.
-
Repairs versus spares. Historically, missions have been of short duration so that systems and components were not expected to break down during the missions; consequently, technology was not pushed to extend reliability. For long-duration missions, however, breakages are inevitable. One solution is to take along an inventory of spare parts. However, this is mass-intensive, and no inventory can be exhaustive. The alternative is to “take the tools, not the parts.” Advances in rapid prototyping have produced commercially available machines that can produce parts of a complicated, three-dimensional nature, given power and an electronic file describing the object. The downside of this approach is a higher power requirement and the need to carry the necessary feed materials, furnaces, and so on. However, if a “power rich” approach is part of the architecture, this is readily accommodated. An assessment of the potential benefits of rapid prototyping of spare parts needs to be included.
-
Studies of trade offs, which must take into account the additional mass associated with the tools, may suggest an optimal solution.
-
Robotic precursor missions to the Moon prior to human landing. Every kilogram of equipment taken to the lunar surface needs to perform for as long as practical while remaining cost-effective. Although the surface conditions can be closely approximated, no simulation can totally mimic the lunar environment. NASA has no current plans to fund an ISRU precursor demonstration; a precursor mission is dependent on an opportunity with one of NASA’s international partners.
Alignment with the Vision for Space Exploration: Green Flag
The benefits of the ISRU project to both lunar and Mars exploration are well aligned with the goals of the VSE because this technology can dramatically improve the probability of successfully achieving lunar and Mars mission goals. The performance benefit of consumables production on the surface allows an extended science mission for the VSE, not simply a quick visit. This research project is unique in the world; no other country at present is known to be seriously developing technologies for ISRU.
20
FISSION SURFACE POWER
Objective
The objective of ETDP’s Fission Surface Power (FSP) systems project is to develop an FSP system concept that meets surface power requirements, including the periodic recharging of long-duration portable power sources, at reasonable cost with added benefits over competitive alternatives. To achieve this objective, NASA has organized a joint NASA and DOE team with representatives from NASA’s GRC and MSFC and DOE’s Idaho National Laboratory, Los Alamos National Laboratory (LANL), Oak Ridge National Laboratory, and Sandia National Laboratories. In addition, NASA and DOE have involved industrial teams (e.g., Lockheed Martin and Pratt & Whitney Rocketdyne) and universities in their studies. The initial focus is on providing a 40-kWe nuclear reactor that could power the proposed Shackleton lunar base and provide the added assurance that such a concept could also be used to power a Mars base. The FSP concept is at a fairly high TRL, which should reduce both the risk and the cost of developing it.
Status
If NASA chooses FSP as its source of electrical power, the 40 kWe reactor would be designed to operate for at least 8 years at full power within the mass envelope of the Lunar Surface Access Module and could be used at any location on the Moon. Shielding would be provided by the lunar regolith, that is, inserting the reactor in a pre-excavated hole and adding upper plug shielding.
The reactor would use uranium dioxide fuel and Type 316 stainless steel (SS-316) cladding. Both of these materials have been used in terrestrial reactors. The coolant would be a eutectic of sodium and potassium referred to as “NaK.” This coolant has also been used in terrestrial reactors. For the power conversion system, NASA is proposing to use Stirling power conversion, a technology that NASA has been studying in various technological forms for about 20 years. A backup power conversion option is Brayton technology, building on what was developed for the proposed Jupiter Icy Moons Orbiter (JIMO) nuclear power system.
Ratings
Quality: Green
Historically NASA and the DOE have been the leaders in space nuclear power, and that continues to be the case now. There is no evidence that international entities will enter this field within the schedule envisioned for the VSE, although it is pointed out that the Russians have or did have space nuclear reactor experience. Given that
this project is driven by the VSE and therefore concentrates on relatively small-scale reactors in which there is no obvious commercial interest, it is very doubtful that any non-NASA, non-DOE sources will develop a competing or alternative technology that NASA could use for this purpose.
The project team in place is composed of NASA and DOE personnel who are working well together, and some of the members have worked on previous space nuclear reactor programs (e.g., SP-100 space nuclear reactor power system and JIMO) so they have experience in the field. The members do not have flight experience because the United States has not flown a fission reactor since 1965, nor do they have experience in burying fission reactors on the Moon; both skills will have to be learned.
The FSP Systems project plan, as presented to the committee, lacked detailed specificity on the organizational interactions—for example, the structure of the DOE interrelationships. No lead DOE laboratory was identified. The details of NASA’s interaction with the DOE laboratories were not specified.
Effectiveness in Developing and Transitioning: Yellow Flag
The FSP Systems project’s technology roadmap envisions an interactive combination of concept definition and risk reduction work through FY 2012 to support an FY 2013 awarding of a prime contract to produce the development test models, engineering models, and flight models. Under this plan, NASA estimates that TRL 6 would be achieved by 2012.
The proposed budget profile for this project incurs a large programmatic risk. Jumping from $14 million in 2013 to over $200 million per year in the subsequent years will strain U.S. industrial capabilities. Industry participation in the 2008-2013 period would serve to get industry vested in the project. However, the industrial base for nuclear engineering technologies has shrunk in the past 20 years owing to the standstill in commercial reactor construction, and there is a concern that that situation, coupled with an aging workforce, may mean that the industry may not be able to react to a sudden call in a few years to a NASA program just as the licensing of new commercial reactors appears to be significantly increasing.
In addition, the committee is concerned about the potential consequences resulting from setting 2013 as the proposed date of decision. Other ETDP project teams, such as those for In Situ Resource Utilization, Lunar Dust Mitigation, and Cryogenic Fluid Management, stated that they would change their tasks if they knew that they would have access to 40 kWe rather than the use of the two or three modules of 6 to 10 kWe per module currently envisioned with a photovoltaic system. To wait until 2013 to make this decision may limit much of the work of these projects over the next few years.
A potential gap in the FSP Systems technology development effort is the absence of a full-up ground test unit that incorporates both the nuclear reactor and the power conversion subsystem in a single, integrated unit that could be tested prior to use in an actual mission in the representative environment. The NASA and DOE team considered this option and concluded that it can demonstrate readiness through a combination of component, subsystem, non-nuclear, and zero-power nuclear testing; nonetheless, there is a concern borne out by other space projects that having a full-up ground test unit can allow the identification and correction of unforeseen problems (the “unknown unknowns”) and provide confidence that the flight unit will perform as designed. Before committing to the proposed program of no full-up ground test unit, an independent, detailed technical and programmatic review of the project’s proposal by NASA and the DOE would be beneficial.
Alignment with the Vision for Space Exploration: Gold Star
The availability of 40 kWe of continuous electrical power during the day and night would have major architectural benefits. Technologists working to develop In Situ Resource Utilization, Lunar Dust Mitigation, and Cryogenic Fluid Management would greatly benefit from the availability of increased electrical power. Obviously, the life support system and science instruments would benefit from more power. This is a critical enabling technology for human exploration of the Moon and Mars. The committee believes that the implementation of fission power of the magnitude considered by NASA would have a profound effect on major aspects of the entire VSE.
21
SUPPORTABILITY
Objective
The basic concept of supportability is to minimize the logistics footprint required to support exploration missions. Strategies to achieve this objective include broad implementation of commonality and standardization at all hardware levels and across all systems: interoperability, repair of failed hardware at the lowest possible hardware level, manufacture of structural and mechanical replacement components as needed, and logistics.
The Supportability project consists of three elements: Component Level Electronic Assembly and Repair, which is further divided into manual repair, semiautomated diagnostics, and functional test and automated repair; Minimally Intrusive Repair, Detection, and Self-Healing Systems; and Smart Coatings. The goals of these elements are to decrease reliance on terrestrial support, reduce the mass volume of logistics spares, increase the operational availability of spacecraft systems, and provide robust, damage-tolerant systems. The benefits of supportability are such that all three tasks presented to the committee were ranked highly by the Constellation Program based on their impact on life-cycle costs. The selected tasks are already defined as either high ranking or as lunar-critical path items.
Status
The Supportability project team appears to have the expertise and innovation to complete the tasks as defined; however, this project seems to be a small subset of the tasks required for a general implementation of supportability. It needs to be expanded, as it appears to be implemented on the basis of specific technology requests as opposed to a systematic look at all the supportability requirements and options. This approach presents a risk that supportability will be available in some areas but not in others.
The Apollo missions to the Moon were of short duration, and systems and components were not expected to break down during the missions—that is, technology was pushed to extend reliability. For long-duration missions, however, component failure is more probable. The issue of the logistics for the accommodation or replacement of damaged or failed parts must be addressed as part of the architecture.
Historically, this problem of reliable operation was addressed by multiply redundant systems, which usually prevented a component failure from leading to system failure. This solution of multiple redundancies may not be practical for large-scale and prolonged operations such as a lunar or Mars base.
Alternatives to long-term reliability include having spare parts available, commonality, and in situ fabrication. A simple approach to long-term reliability is to take along an inventory of spare parts. This may prove impractical for large-scale operations with thousands of parts. In addition, taking spares is mass-intensive and may not work, as the failure of a part may not have been anticipated. Carrying spares for everything is impractical and expensive. An operational alternative is to design commonality between similar parts used in different systems. If there is actual design commonality (e.g., in displays and controls or processor boards), less critical or no longer operating modules can be scavenged to provide components for more critical operating modules. This may reduce the number of spares needed, but it cannot accommodate all possibilities. A possible technological alternative applicable to some types of components is to “take the tools not the parts.” Advances in rapid prototyping have produced commercially available machines that can produce final net-shape parts of a complicated, three-dimensional nature. Fabrication of components made of plastic, ceramics, or metals has been demonstrated. While the committee is aware that NASA has a logistics study effort underway in the Constellation Program, the committee believes that NASA should examine the possibility of funding a technology project to examine if new technologies involving physical commonality and rapid prototyping could reduce the future need for having spare parts and the accompanying logistical burden.
The ETDP Supportability project has recognized the issue of component repair and replacement as key to long-term reliability but is focusing primarily on electronic components. Replacement of Earth-fabricated mechanical or structural components is not being examined for long-term sustainability of lunar and Mars missions.
The ETDP could evaluate the applicability of the current state of the art in rapid prototyping equipment to the exploration mission, and then evaluate the balance between system redundancy, design commonality, logistical
supply of spare parts fabricated on Earth, and fabricating components on-site using local resources to achieve the best cost and benefits for maintaining a sustainable exploration program. For those components that might feasibly be fabricated on-site and that would provide cost-benefit advantage over other approaches, a low-TRL ETDP technology development program could be initiated.
There is a significant risk that advancing technology will eclipse many aspects of existing avionics systems. A task needs to be added to assess the impact of technology development on projected supportability options. Technologies developing on parallel tracks to electronics for sensing and control include bacteriorhodopsin-based state machines, artificial opal-based state machines, wavelength-routed fault-tolerant all-optical networks, optical sensors (all implemented in circuit or free space radio-frequency or infrared-based wireless networks), and living biological sensing systems based on “smart yeast.” These technologies reduce the need for a substantial amount of electronics and code, eliminate the need for copper wire carrying telemetry in many cases, and are so low in mass that they allow for massive redundancy, thus reducing the need for repair. Other examples are holographic-crystal-based memories and optical correlators for information processing (which would include Integrated Vehicle Health Management including diagnostics and prognostics) standardized microcontrollers, as well as polymer-based electronics and displays that can be manufactured with bubble jet printers.
In addition to developing chemically responsive insulation polymers that heal themselves under a variety of conditions, approaches for detecting and repairing age-related damage to wiring should address techniques that can be carried out autonomously by microrobotics capable of locating faults by chemical detection of self-healed or degraded materials and by the presence and direction of electric fields or the direction of magnetic fields (stored in particles contained in the insulation) generated by a fault. These types of systems could spin polymers to repair insulation and install antichafing at the damage site and similar sites to prevent recurrence.
Ratings
Quality: Green Flag
The various tasks under the Supportability project appear to have high quality in both the development path layout and the knowledge and ability of participants to complete the projects. The TRLs of the projects are in the TRL 2 range, with some concepts advancing to TRL 4 in 2008. This project has many affiliated universities and industries. The effort would likely benefit from the involvement of more universities examining competing concepts.
Effectiveness in Developing and Transitioning: Yellow Flag
The current level of effort limits the effectiveness of the Supportability project in achieving its goals. The risks are very high owing to this problem—the technology is at a low TRL, is specific to particular technologies, and lacks generality.
The technology gaps identified are as follows:
-
Component-Level Electronic Assembly and Repair
-
Conformal coating on electronic circuit cards is conducive to neither repair nor diagnostics. Technology development is required to produce systems capable of removing and restoring coatings of arbitrary thickness or sensing parameters without disturbing the coatings.
-
Diagnostics requires multiple types of complex instruments. Methods are required to sense and evaluate signals in such a way that the required information can be generated with a single analysis instrument. An alternative approach is to reduce the mass, power, and volume of the required diagnostic tools to an acceptable value.
-
-
Minimally Intrusive Repair, Detection, and Self-Healing Systems
-
Prototype conductive polymeric outer insulation layers are too dissipative to be used for detecting faults due to insulation failure. This is a materials issue that currently prevents fault detection via wire insulation from becoming a reality.
-
-
-
The self-repair process mediated with chemically reactive microsphere fill-in wire insulation generates by-products that can accelerate the degradation of wire insulation. This is another materials problem that will require finding a reactive system which produces insulating polymers with the correct properties but no problematic by-products.
-
-
Smart Coatings
-
Remote detection of corrosion. A system is required to nondestructively detect corrosion in hidden places without the removal of paint and thermal control/protection systems that may cover the structure. This will require the use of chemical indicators, the release of detectable volatiles, or the exploitation of physical effects such as surface acoustic waves to detect the corrosion. Failure to achieve this capability might result in increased program costs; baselining will need to be carried out to verify this point.
-
Stabilization of flame deflector refractory coatings. The current method of anchoring the refractory material to the flame deflectors has a poor performance record. Failure to develop more effective methods and materials will result in increased risks to personnel and equipment and costs to the program.
-
Alignment with the Vision for Space Exploration: Green Flag
The performance benefits from self-sufficiency with respect to maintainability and streamlined logistics will enable cost reductions in implementing both lunar and Mars exploration and thus the Supportability project work is well aligned with the VSE.
22
HUMAN-ROBOTIC SYSTEMS/ANALOGS
Objective
The main effort of the Human-Robotic Systems/Analogs project concentrates on reconfigurable, long-range robot vehicles and supporting technologies. This enables In Situ Resource Utilization (the unloading of the lander, the assembly/maintenance/transfer of the lunar base, longer range and longer duration of basic science investigations) and complements and/or augments astronaut safety and productivity. The plan is novel (it is unlike that used for Apollo) and aggressive (it is based around technologies not yet flown), but it appears feasible, and if it is successful it will not only enable the current Constellation Program architecture but will also significantly enhance it.
Status
The basic plan to coordinate the Human-Robotic Systems/Analogs project appears solid and seems to include all relevant expertise within NASA. The team has some outstanding individual members and groups, particularly at JSC in systems design and integration, at JPL in rover and vehicle development, and at ARC in software. It is not clear, however, that the members at the other NASA field centers in the plan add significantly to the effort. The NASA team stated that the technology is generally at TRL 4; it needs to be advanced to TRL 6. NASA appears to be planning to conduct almost all of the effort in-house. By ignoring external expertise, this approach may not produce the highest-quality or even the best-value product possible. The claim is that the team could not be strengthened without additional funding. However, it seems likely that the replacement of several existing components of the current team by external experts might well produce significantly superior results.
Ratings
Quality: Green Flag
In contrast to its position in some other ETDP task areas, NASA is not the international benchmark in this technical area (robotics and human-machine systems). While the NASA team has some outstanding individuals
and the project leads are aware of the wider national and international research community, apart from a few small existing grants it appears that the strategy is to “go it alone.” While NASA is the clear world leader in planetary rovers and extraterrestrial vehicles and in some aspects of time-delayed teleoperation, the leading expertise in many of the other key technologies for this task lie outside NASA. It appears that the effort could benefit from a wider involvement of experts in academia and industry. However, the committee believes that the team could achieve the objectives and that it is a matter of how well or how cost-effectively the objectives would be achieved.
Effectiveness in Developing and Transitioning: Yellow Flag
Facilities to mature some ground-based aspects of the Human/Robotic Systems/Analogs technology are in place. However, NASA will need to provide significant additional resources if the developed technologies are to be tested in relevant environments, including in-orbit and realistic lunar environment testing. NASA seeks to transition the technology through analog testing, which integrates the testing of multiple subsystems among nine potential test sites. Analog field testing is designed to help identify technology gaps for future systems and to develop requirements for operational concepts. Detailed planning is needed to ensure that the 5-year notional plan on research and technology (RAT) studies can enable the Human/Robotic supporting technologies to achieve the desired TRLs and to ensure that these studies are relevant for all lunar considerations. (RAT studies are performed by a combined group formed of inter-NASA center personnel, collaborating with representatives of industry and academia, to conduct remote field exercises.)
The main risks for meeting the current plan and schedule appear to be budgetary. This effort appears underfunded in the next 5 years or so. While the basic technology concept appears solid, significant costs are likely to arise in development and (particularly) in testing. If NASA does not make the commitment to meet these costs, the deadlines will almost certainly slip, and the effort could fail.
Alignment with the Vision for Space Exploration: Green Flag
The Human/Robotic technology has significant architectural benefits. It enables lower costs by employing a significantly higher percentage of lander mass in in situ operations (more of the landed mass is part of the lunar vehicles). It enables higher payload capability and lower operational risks (the lunar vehicles will robotically handle/transport/assemble high-mass and high-risk components). The technology has significant performance benefits. It enables longer and more distant (from the lunar base) missions (autonomously and with astronauts). It offers the possibility of transporting the entire lunar operation across the lunar surface, to access significantly more sites of scientific interest. The technology is generally robust to changes to the architecture (for example, exploration missions to Mars). The main issue preventing direct transfer to Mars missions is the longer time delay, which would prevent the proposed ground-based control mode for some of the robotic operations.
FINDING AND RECOMMENDATION ON ETDP PROJECTS
Consistent with its statement of task, the committee evaluated each of the 22 ETDP projects on the basis of the following:
-
The quality of the research effort, taking into account the research team, contacts with appropriate non-NASA entities, and the plan for achieving the objectives;
-
The effectiveness with which the research is carried out and transitioned to the exploration program, including progress to date, facilities, apparent gaps in the program, and the likelihood that the required TRL will be reached (the committee decided that simply noting gaps, as requested in the study task, was too narrow an objective and that gauging “effectiveness,” as defined here, was more appropriate and inclusive); and
-
The degree to which the research is aligned with the VSE, specifically, the degree to which the program included exploration beyond the Moon.
Finding on Projects: The committee evaluated the 22 individual ETDP projects and rated the quality of the research, the effectiveness with which the research is carried out and transitioned to the exploration program, and the degree to which the research is aligned with the Vision for Space Exploration. The committee found that, with two exceptions, each project had areas that could be improved.
In each of these three areas, the committee rated the projects using a flag whose color represents the committee’s consensus view. These ratings are indicated in the descriptions of the individual projects above and are summarized in Table 2.2. A few projects were given two flag colors owing to major distinctions between elements within a given topic.
Recommendation on Projects: Managers in the Exploration Systems Mission Directorate and Exploration Technology Development Program should review and carefully consider the committee’s ratings of the individual ETDP projects and should develop and implement a plan to improve each project to a level that would be rated by a subsequent review as demonstrating “appropriate capabilities and quality, accomplishment, and plan” (green flag).
TABLE 2.2 Summary of the Committee’s Ratings for Each ETDP Project with Regard to Quality, Effectiveness in Developing and Transitioning Technology, and Alignment with the Vision for Space Exploration
|
|
|
NOTE: A few projects were given two ratings because of major distinctions between elements within a given project. |