
Intelligent Autonomy in Robotic Systems
MARK CAMPBELL
Cornell University
Automation is now apparent in many aspects of our lives, from aerospace systems (e.g., autopilots) to manufacturing processes (e.g., assembly lines) to robotic vacuum cleaners. However, although many aerospace systems exhibit some autonomy, it can be argued that such systems could be far more advanced than they are. For example, although autonomy in deep-space missions is impressive, it is still well behind autonomous ground systems. Reasons for this gap range from proximity to the hardware and environmental hardships to scientists tending not to trust autonomous software for projects on which many years and dollars have been spent.
Looking back, the adoption of the autopilot, an example of advanced autonomy for complex systems, aroused similar resistance. Although autopilot systems are required for most commercial flights today, it took many years for pilots to accept a computer flying an aircraft.
Factors that influence the adoption of autonomous systems include reliability, trust, training, and knowledge of failure modes. These factors are amplified in aerospace systems where the environment/proximity can be challenging and high costs and human lives are at stake. On deep-space missions, for example, which take many years to plan and develop and where system failure can often be traced back to small failures, there has been significant resistance to the adoption of autonomous systems.
In this article, I describe two improvements that can encourage more robust autonomy on aerospace missions: (1) a deeper level of intelligence in robotic systems; and (2) more efficient integration of autonomous systems and humans.
INTELLIGENCE IN ROBOTICS
Current robotic systems work very well for repeated tasks (e.g., in manufacturing). However, their long-term reliability for more complex tasks (e.g., driving a car) is much less assured. Interestingly, humans provide an intuitive benchmark, because they perform at a level of deep intelligence that typically enables many complex tasks to be performed well. However, this level of intelligence is difficult to emulate in software. Characteristics of this deep intelligence include learning over time, reasoning about and overcoming uncertainties/new situations as they arise, and developing long-term strategies.
Researchers in many areas are investigating the concept of deeper intelligence in robotics. For our purposes, we look into three research topics motivated in part by tasks that humans perform intelligently: (1) tightly integrated perception, anticipation, and planning; (2) learning; and (3) verified plans in the presence of uncertainties.
Tightly Integrated Perception, Anticipation, and Planning
As robotic systems have matured, an important advancement has been the development of high-throughput sensors. Consider, for example, Cornell’s autonomous driving vehicle, one of only six that completed the 2007 DARPA Urban Challenge (DUC) (Figure 1). The vehicle (robot) has a perception system with a 64-scan lidar unit (100Mbits/sec), 4-scan lidar units (10MBits/sec), radars, and cameras (1,200Mbits/sec).
Although the vehicle’s performance in the DUC was considered a success (Iagnemma et al., 2008; Miller et al., 2008), there were many close calls, several small collisions, and a number of human-assisted restarts. In fact, the fragility of practical robotic intelligence was apparent when many simple mistakes in perception cascaded into larger failures.
One critical problem was the mismatch between perception, which is typically probabilistic because sensors yield data that are inherently uncertain compared to the true system, and planning, which is deterministic because plans must be implemented in the real world. To date, perception research typically provides robotic planners with probabilistic “snapshots” of the environment, which leads to “reactive,” rather than “intelligent,” behaviors in autonomous robots.
Aerospace systems have similar problems. Figure 2 shows a cooperative unmanned air vehicle (UAV) system for searching out and tracking objects of interest (Campbell and Whitacre, 2007), such as tuna fish or survivors of hurricanes and fires. System failures include searching only part of an area, losing track of objects when they move out of sight (e.g., behind a tree or under a bridge), or vibrations or sensor uncertainty aboard the aircraft.
Overcoming these problems will require new theory that provides tighter linkage between sensors/probabilistic perception and actions/planning (Thrun et
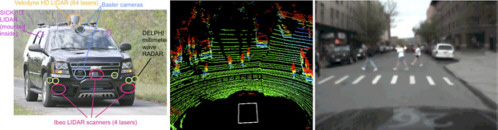
FIGURE 1 The autonomous driving vehicle developed by Cornell University, which can handle large amounts of data intelligently. Left: Robot with multi-modal sensors for perceiving the environment. Middle: Screenshot of a 64-scan lidar unit. Right: Screenshot of a color camera.

FIGURE 2 Multiple UAV system. Left: SeaScan UAV with a camera-based turret. Center: Notional illustration of cooperative tracking using UAVs. Right: Flight test data of two UAVs tracking a truck over a communication network with losses (e.g., dropped packets).
al., 2005). Given the high data throughput of the sensors on most systems, a key first step is to convert “data to information.” This will require fusing data from many sensors to provide an accurate picture of the static, but potentially dynamic, environment, including terrain type and the identity and behaviors of obstacles (Diebel and Thrun, 2006; Schoenberg et al., 2010).
Take driving, for example. A human is very good at prioritizing relatively small amounts of information (i.e., from the eyes), as well as a priori learned models. If an object is far away, the human typically focuses on the “gist” of the scene, such as object type (Ross and Oliva, 2010). If an object is closer, such as when something is about to hit a car, the primary focus is on proximity, rather than type (Cutting, 2003). To ensure that large amounts of data are transformed into critical information that can be used in decision making, we need new representations and perception methods, particularly methods that are computationally tractable.
Plans must then be developed based on probabilistic information. Thus, the second essential step is to convert “information to decisions,” which will require a new paradigm to ensure that planning occurs to a particular level of probability, while also incorporating changes in the environment, such as the appearance of objects (from the perceived information and a priori models). This is especially important in dynamic environments, where the behavior and motion of objects are strongly related to object type.
For autonomous driving (Figure 1), important factors for planning include the motion of other cars, cyclists, and pedestrians in the context of a map (Blackmore et al., 2010; Hardy and Campbell, 2010; Havlak and Campbell, 2010). For cooperative UAVs (Figure 2), important factors include the motion of objects and other UAVs (Grocholsky et al., 2004; Ousingsawat and Campbell, 2007). Although humans typically handle these issues well by relying on learned models of objects, including their motions and behaviors, developing robotic systems that can handle these variables reliably can be computationally demanding (McClelland and Campbell, 2010).
For single and cooperative UAV systems, such as those used for search and rescue or defense missions, data are typically in the form of optical/infra-red video and lidar. The necessary information includes detecting humans, locating survivors in clutter, and tracking moving cars—even if there are visual obstructions, such as trees or buildings. Actions based on this information then include deciding where to fly, a decision strongly influenced by sensing and coverage, and deciding what information to share (among UAVs and/or with ground operators). Ongoing work in sensor fusion and optimization-based planning have focused on these problems, particularly as the number of UAVs increases (Campbell and Whitacre, 2007; Ousingsawat and Campbell, 2007).
Learning
Humans typically drive very well because they learn safely over time (rules, object types and motion, relative speeds, etc.). However, for robots, driving well is
very challenging, especially when uncertainties are prevalent. Consider Figure 3, which shows a map of the DUC course, with an overlay of 53 instances of emergency slamming of brakes by Cornell’s autonomous vehicle. Interestingly, many of these braking events occurred during multiple passes near the same areas; the most frequent (18 times) took place near a single concrete barrier jutting out from the others, making it appear (to the perception algorithms) that it was another car (Miller et al., 2008).
Currently, a number of researchers exploring learning methods (e.g., Abbeel et al., 2010) have developed algorithms that learn helicopter dynamics/maneuver models over time from data provided by an expert pilot (Figure 3). Although learning seems straightforward to humans, it is difficult to implement algorithmically. New algorithms must be developed to ensure safe learning over time and adjust to new environments or uncertainties that have not been seen before (e.g., if at some point a car really did appear).
Verification and Validation in the Presence of Uncertainties
Current methods of validating software for autonomy in aerospace systems involve a series of expensive evaluation steps to heuristically develop confidence in the system. For example, UAV flight software typically requires validation first on a software simulator, then on a hardware-in-the-loop simulator, and then on flight tests. Fault-management systems continue to operate during flights, as required.
Researchers in formal logic, model checkers, and control theory have recently developed a set of tools that capture specification of tasks using more intuitive language/algorithms (Kress-Gazit et al., 2009; Wongpiromsarn et al., 2009). Con-
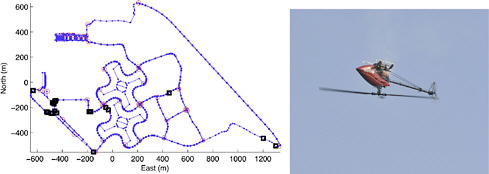
FIGURE 3 Left: Map of the DUC course (lines = map; circles = stop signs). Black squares indicate where brakes were applied quickly during the six-hour mission. Right: A model helicopter (operated by remote control or as an autonomous vehicle) in mid-maneuver. These complex maneuvers can be learned from an expert or by experimentation. Photo by E. Fratkin.
sider, for example, a car driving through an intersection with another car in the area (Figure 4). The rules of the road can be specified by logic, and controllers for autonomous driving can be automatically generated. Current research, however, typically addresses only simple models with little or no uncertainty.
New theory and methods will be necessary to incorporate uncertainties in perception, motion, and actions into a verifiable planning framework. Logic specifications must provide probabilistic guarantees of the high-level behavior of the robot, such as provably safe autonomous driving 99.9 percent of the time. These methods are also obviously important for aerospace systems, such as commercial airplanes and deep-space missions, where high costs and many lives are at risk.
INTERACTION BETWEEN HUMANS AND ROBOTS
Although interaction between humans and robots is of immense importance, it typically has a soft theoretical background. Human-robotic interaction, as it is typically called, includes a wide range of research. For example, tasks must be coordinated to take advantage of the strengths of both humans and robots; theory must scale well with larger teams; humans must not become overloaded or bored; and external influences, such as deciding if UAVs will have the ability to make actionable decisions or planetary rovers will be able to make scientific decisions, must be taken into consideration.
Efficient integration of autonomy with humans is essential for advanced aerospace systems. For example, a robot vacuuming a floor requires minimal interaction with humans, but search and tracking using a team of UAVs equipped with sensors and weapons is much more challenging, not only because of the complexity of the tasks and system, but also because of the inherent stress of the situation.
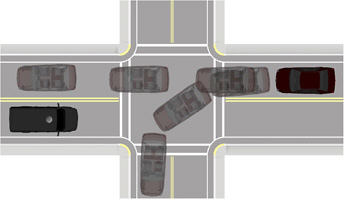
FIGURE 4 Example of using probabilistic anticipation for provably safe plans in autonomous driving.
The subject of interactions between humans and robots has many aspects and complexities. We look at three research topics, all of which may lead to more efficient and natural integration: (1) fusion of human and robotic information; (2) natural, robust, and high-performing interaction; and (3) scalable theory that enables easy adoption as well as formal analysis.
Fusion of Human and Robotic Information
Humans typically provide high-level commands to autonomous robots, but clearly they can also contribute important information, such as an opinion about which area of Mars to explore or whether a far off object in a cluttered environment is a person or a tree. Critical research is being conducted using machine-learning methods to formally model human opinions/decisions as sources of uncertain information and then fuse it with other information, such as information provided by the robot (Ahmed and Campbell, 2008, 2010).
Figure 5 shows a search experiment with five humans, each of whom has a satellite map overlaid with a density function that probabilistically captures the “location” of objects (Bourgault et al., 2008). The human sensor, in this case, is relatively simple: yes/no detection. A model of the human sensing process was developed by having the humans locate objects at various locations relative to their positions and look vectors. Intuitively, the ability to detect an object declines with increasing range and peripheral vision.
The fusion process, however, must also include uncertain measurements of the human’s location and look vector. During the experiment, each human moved to a separate area, while fusing his/her own (uncertain) sensory information to create an updated density function for the location of objects. Fusion with information from other humans occurred when communication allowed—in this case,
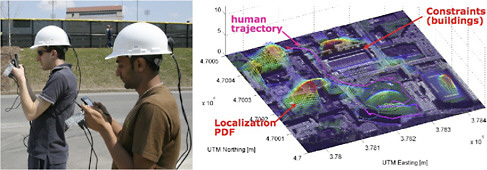
FIGURE 5 Search experiment with a network of five humans. Left: Humans with handheld PCs, local network, GPS, and compass. Right: Overlay of satellite imagery with a density of “probable” locations.
only at close range. Figure 5 shows the trajectory of one human’s path and the real-time fused density of object location.
This experiment demonstrated initial decision modeling and fusion results, but the human decision was decidedly simple. To be useful, however, research, particularly in the area of machine learning, must model more complex outputs, such as strategic decisions over time or decisions made with little a priori data. New methods will be necessary to fuse information from many different sources, such as a human classifying items based on a discrete set of objects or pointing to a continuous area, or combinations of the two.
Natural, Robust, High-Performing Interaction
For effective teamwork by humans and robots, it is important to understand the strengths and weaknesses of both. Humans can provide critical strategic analyses but are subject to stress and fatigue, as well as boredom. In addition, they may have biases that must be taken into account (Parasuraman et al., 2000; Shah et al., 2009). Robots can perform repetitious tasks without bias or feelings. The strengths and weaknesses of both are, in effect, constraints in the design of systems in which humans and robots must work together seamlessly.
The most common interaction is through a computer, such as a mouse, keyboard, and screen. Sometimes, however, a human operator may be presented with more critical information for monitoring or decision making than he/she can handle. For example, the operator may be monitoring two UAVs during a search mission, and both may require command inputs at the same time. Or a human operator who becomes bored when monitoring video screens for hours at a time may not respond as quickly or effectively as necessary when action is required.
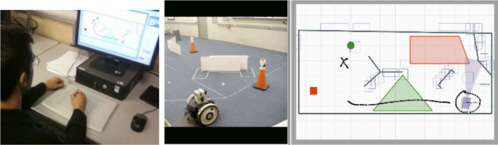
Taking advantage of recent commercial developments in computers that allow humans to interact with systems in many ways, current research is focused on multi-modal interaction. For example, Finomore et al. (2007) explored voice and chat inputs. Shah and Campbell (2010) are focusing on drawing commands on a tablet PC (Figure 6), where pixels are used to infer the “most probable” commands. The human operator can override a command if it is not correct, and the next most probable command will be suggested. Results of this study have shown a high statistical accuracy in recognizing the correct command by the human (Shah and Campbell, 2010).
More advanced systems are also being developed. Kress-Gazit and colleagues (2008) have developed a natural language parser that selects the appropriate command from spoken language and develops a provably correct controller for a robot. Boussemart and Cummings (2008) and Hoffman and Breazeal (2010) are working on modeling the human as a simplified, event-based decision maker; the robot then “anticipates” what the human wants to do and makes decisions appropriately. Although the latter approach is currently being applied only to simplified systems, it has the potential to improve team performance.
Even non-traditional interfaces, such as commanding a UAV by brain waves, are being investigated (Akce et al., 2010).
Scalable Theory
A key constraint on the development of theory and implementations of teams of humans and robots is being able to scale up the theory to apply to large numbers (McLoughlin and Campbell, 2007; Sukkarieh et al., 2003). This is particularly important in defense applications, where hundreds, sometimes thousands of humans/vehicles must share information and plan together.
Most of the focus has been on hierarchical structures, but fully decentralized structures might also be effective (Ponda et al., 2010). Recent research has focused almost exclusively on large teams of cooperative vehicles, but given some level of human modeling, these methods could work for human/robot teams as well. The testing and adoption of these approaches, which will necessarily depend partly on cost and reliability, will continue to be challenging.
REFERENCES
Abbeel, P., A. Coates, and A.Y. Ng. 2010. Autonomous helicopter aerobatics through apprenticeship learning. International Journal of Robotics Research 29(7). doi: 10.1177/0278364910371999.
Ahmed, N., and M. Campbell. 2008. Multimodal Operator Decision Models. Pp. 4504–4509 in American Control Conference 2008. New York: IEEE.
Ahmed, N., and M. Campbell. 2010. Variational Bayesian Data Fusion of Multi-class Discrete Observations with Applications to Cooperative Human-Robot Estimation. Pp. 186–191 in 2010 IEEE International Conference on Robotics and Automation. New York: IEEE.
Akce, A., M. Johnson, and T. Bretl. 2010. Remote Tele-operation of an Unmanned Aircraft with a Brain-Machine Interace: Theory and Preliminary Results. Presentation at 2010 International Robotics and Automation Conference. Available online at http://www.akce.name/presentations/ICRA2010.pdf.
Blackmore, L., M. Ono, A. Bektassov, and B.C. Williams. 2010. A probabilistic particle-control approximation of chance-constrained stochastic predictive control. IEEE Transactions on Robotics, 26(3): 502–517.
Bourgault, F., A. Chokshi, J. Wang, D. Shah, J. Schoenberg, R. Iyer, F. Cedano, and M. Campbell. 2008. Scalable Bayesian Human-Robot Cooperation in Mobile Sensor Networks. Pp. 2342–2349 in IEEE/RS International Conference on Intelligent Robots and Systems. New York: IEEE.
Boussemart, Y., and M.L. Cummings. 2008. Behavioral Recognition and Prediction of an Operator Supervising Multiple Heterogeneous Unmanned Vehicles. Presented at Humans Operating Unmanned Systems, Brest, France, September 3–4, 2008. Available online at http://web.mit.edu/aeroastro/labs/halab/papers/boussemart%20-%20humous08-v1.3-final.pdf.
Campbell, M.E., and W.W. Whitacre. 2007. Cooperative tracking using vision measurements on SeaScan UAVs. IEEE Transactions on Control Systems Technology 15(4): 613–626.
Cutting, J.E. 2003. Reconceiving Perceptual Space. Pp. 215–238 in Perceiving Pictures: An Interdisciplinary Approach to Pictorial Space, edited by H. Hecht, R. Schwartz, and M. Atherton. Cambridge, Mass.: MIT Press.
Diebel, J., and S. Thrun. 2006. An application of Markov random fields to range sensing. Advances in Neural Information Processing Systems 18: 291.
Finomore, V.S., B.A. Knott, W.T. Nelson, S.M. Galster, and R.S. Bolia. 2007. The Effects of Multi-modal Collaboration Technology on Subjective Workload Profiles of Tactical Air Battle Management Teams. Technical report #AFRL-HE-WP-TP-2007-0012. Wright Patterson Air Force Base, Defense Technical Information Center.
Grocholsky, B., A. Makarenko, and H. Durrant-Whyte. 2004. Information-Theoretic Coordinated Control of Multiple Sensor Platforms. Pp. 1521–1526 in Proceedings of the IEEE International Conference on Robotics and Automation, Vol. 1. New York: IEEE.
Hardy, J., and M. Campbell. 2010. Contingency Planning over Hybrid Obstacle Predictions for Autonomous Road Vehicles. Presented at IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, October 18–22, 2010.
Havlak, F., and M. Campbell. 2010. Discrete and Continuous, Probabilistic Anticipation for Autonomous Robots in Urban Environments. Presented at SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, Toulouse, France, September 20–23, 2010.
Hoffman, G., and C, Breazeal. 2010. Effects of anticipatory perceptual simulation on practiced human-robot tasks. Autonomous Robots 28: 403–423.
Iagnemma, K., M. Buehler, and S. Singh, eds. 2008. Special Issue on the 2007 DARPA Urban Challenge, Part 1. Journal of Field Robotics 25(8): 423–860.
Kress-Gazit, H., G.E. Fainekos, and G.J. Pappas. 2008. Translating structured English to robot controllers. Advanced Robotics: Special Issue on Selected Papers from IROS 2007 22(12): 1343–1359.
Kress-Gazit, H., G.E. Fainekos, and G.J. Pappas. 2009. Temporal logic-based reactive mission and motion planning. IEEE Transactions on Robotics 25(6): 1370–1381.
McClelland, M., and M. Campbell. 2010. Anticipation as a Method for Overcoming Time Delay in Control of Remote Systems. Presented at the AIAA Guidance, Navigation and Control Conference, Toronto, Ontario, Canada, August 2–5, 2010. Reston, Va.: AIAA.
McLoughlin, T., and M. Campbell. 2007. Scalable GNC architecture and sensor scheduling for large spacecraft networks. AIAA Journal of Guidance, Control, and Dynamics 30(2): 289–300.
Miller, I., M. Campbell, D. Huttenlocher, A. Nathan, F.-R. Kline, P. Moran, N. Zych, B. Schimpf, S. Lupashin, E. Garcia, J. Catlin, M. Kurdziel, and H. Fujishima. 2008. Team Cornell’s Skynet: robust perception and planning in an urban environment. Journal of Field Robotics 25(8): 493–527.
Ousingsawat, J., and M.E. Campbell. 2007. Optimal cooperative reconnaissance using multiple vehicles. AIAA Journal of Guidance Control and Dynamics 30(1): 122–132.
Parasuraman, R., T.B. Sheridan, and C.D. Wickens. 2000. A model for types and levels of human interaction with automation. IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans 30: 286–297.
Ponda, S., H.L. Choi, and J.P. How. 2010. Predictive Planning for Heterogeneous Human-Robot Teams. Presented at AIAA Infotech@Aerospace Conference 2010, Atlanta, Georgia, April 20–22, 2010.
Ross, M., and A. Oliva. 2010. Estimating perception of scene layout. Journal of Vision 10: 1–25.
Schoenberg, J., A. Nathan, and M. Campbell. 2010. Segmentation of Dense Range Information in Complex Urban Scenes. Presented at IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, October 18–22, 2010.
Shah, D., and M. Campbell. 2010. A Robust Sketch Interface for Natural Robot Control. Presented at IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, October 18–22, 2010.
Shah, D., M. Campbell, F. Bourgault, and N. Ahmed. 2009. An Empirical Study of Human-Robotic Teams with Three Levels of Autonomy. Presented at AIAA Infotech@Aerospace Conference 2009, Seattle, Washington, April 7, 2009.
Sukkarieh, S., E. Nettleton, J.H. Kim, M. Ridley, A. Goktogan, and H. Durrant-Whyte. 2003. The ANSER Project: data fusion across multiple uninhabited air vehicles. The International Journal of Robotics Research 22(7–8): 505.
Thrun, S., W. Burgard, and D. Fox. 2005. Probabilistic Robotics. Cambridge, Mass.: MIT Press.
Wongpiromsarn, T., U. Topcu, and R.M. Murray. 2009. Receding Horizon Temporal Logic Planning for Dynamical Systems. Available online at http://www.cds.caltech.edu/~utopcu/images/1/10/WTM-cdc09.pdf.












