
3
Lessons Learned from Ocean Color Satellite Missions and Essential Requirements for Future Success
Building and launching a sensor are only the first steps toward successfully producing ocean color radiance and ocean color products. Even if the sensor meets all high-quality requirements, without stability monitoring, vicarious calibration, and reprocessing capabilities, the data will not meet standards for scientific and climate-impact assessments. This chapter surveys lessons from previous missions and outlines the requirements for obtaining useful ocean color data from a global remote sensing mission.
During the past three decades, several polar orbiting satellites have been launched to measure water-leaving radiance (Lw) on a global scale approximately every one to three days (depending primarily on swath width; see Appendix A for a detailed satellite description). The progression from the Coastal Zone Color Scanner (CZCS) to the Sea-viewing Wide Field-of-view Sensor (SeaWiFS), to the Moderate Resolution Imaging Spectroradiometer (MODIS), and finally to the Joint Polar Satellite System (JPSS) Visible Infrared Imager Radiometer Suite (VIIRS), represents the progression from pilot study to research to operational ocean color remote sensing for the United States. With the exception of the most recent European Medium-Resolution Imaging Spectrometer (MERIS) mission, each of these satellite missions carried a Type 1 (see Table 2.1) sensor with only moderate spatial and spectral resolution. The planned Pre-Aerosol-Clouds-Ecosystem (PACE) mission outlined in the National Aeronautics and Space Administration’s (NASA) Climate Architecture Plan (2010) represents an advanced Type 1 ocean color research mission. Therefore, this retrospective analysis is restricted to Type 1 sensors. Although some conclusions and recommendations are specific to Type 1 missions, many lessons about mission design and requirements apply to all sensor types.
THE COASTAL ZONE COLOR SCANNER: PROOF OF CONCEPT
CZCS was the first ocean color sensor to provide local-to global-scale ocean color observations during its operation from 1978 to 1986 (Hovis et al., 1980; Gordon and Morel, 1983). CZCS was launched on Nimbus 7 and was a prototype mission to demonstrate that ocean color can be retrieved from space. Therefore, CZCS did not routinely or continuously collect global data because it had to share power and tape recorder capacity with other sensors.
The quality of CZCS data products was significantly compromised by the lack of a sustained in situ monitoring program of Lw to provide sea-truth for the satellite measurements, and by the lack of near-infrared wavebands for atmospheric correction (Evans and Gordon, 1994). During the initial phase of CZCS, NASA and the Nimbus Experiment Team supported a well-formulated program of in situ observations. These data were key in providing the initial instrument vicarious calibration; however, the program was active only during the first months of CZCS on-orbit lifetime (Werdell et al., 2007). Because CZCS experienced significant degradation of the green and blue bands over its lifetime, and the red band used for atmospheric correction experienced an abrupt shift in its performance, CZCS calibration relied heavily on clear water assumptions for the green bands and other simplifying assumptions that could not be validated (Evans and Gordon, 1994). Further, sampling by CZCS was not global and except for regions where data were routinely collected such as the coastal United States, special requests were necessary to initiate data acquisition. In fact, no CZCS observations were ever made in large regions of the global ocean, such as in the South Pacific Subtropical Gyre. Limitations in sensor performance and the lack of sustained, continuous global observations restricted CZCS’s ability to quantify long-term changes in the global ocean biosphere. However, the need for continuous vicarious calibration was
recognized and led to the Marine Optical Buoy (MOBY) system.
Conclusion: During the CZCS era, scientists learned about the importance of continuous sampling to achieve global coverage, of making in situ measurements throughout a mission’s lifetime to assess changes in the sensor’s gain over time and to validate the data products, and of atmospheric corrections. In particular, the need for near-infrared (NIR) measurements to improve atmospheric correction was recognized during the CZCS experience and led to the SeaWiFS band-set.
LESSONS FROM THE SEAWIFS/MODIS ERA
SeaWiFS and MODIS-Aqua have been highly successful, global-scale U.S. ocean color missions that contributed to major advances in the ocean sciences (Siegel et al., 2004; NRC, 2008a; McClain, 2009). SeaWiFS launched in September 1997 with a design life of five years and operated for 13 years, until December 14, 2010 (Hooker et al., 1992; McClain, 2009). SeaWiFS provided almost daily global Earth coverage from a polar orbit. Six visible bands detected changes in ocean properties with high signal-to-noise ratio (SNR) to allow discrimination of low ocean reflectance against a very high atmospheric background signal. Two near-infrared (NIR) bands were used to estimate aerosol properties for atmospheric correction (although reduction in digitization of the NIR channels was an important source of noise in open ocean retrievals [Hu et al., 2004]). Key design features minimized polarization sensitivity and far-field stray light and enabled the measurement of low signal ocean radiances, and land and cloud reflectance at very high signals, without saturation. A solar diffuser assisted with the on-orbit sensor performance evaluation (Eplee et al., 2007). The sensor tilt capability minimized sun glint. Most importantly, the lunar calibration capability (Barnes et al., 2004) helped SeaWiFS achieve superb long-term stability.
The overall uncertainty level for SeaWiFS calibration gains can be estimated to be ~0.3 percent (assuming independence among the three sources of uncertainty). Reducing the system calibration uncertainty to such a low number was a major accomplishment of the SeaWiFS mission and resulted from a commitment to minimizing the sources of uncertainty from three primary independent sources: (1) uncertainty in the calibration trends in time, (2) uncertainty in the MOBY calibration and its determinations of water-leaving radiance, and (3) uncertainty in the estimation of SeaWiFS calibration gain corrections. The details of the three sources of uncertainty are presented below; however, their contribution to estimation of the overall uncertainty levels are briefly discussed here. First, uncertainty in the estimation of SeaWiFS calibration over time, i.e., sensor sensitivity degradation, has been determined for SeaWiFS using its monthly lunar viewing of the moon at the same phase (Eplee et al., 2004, 2011). Relative calibration coefficients for some bands had decreased by as much as nearly 20 percent (Figure 3.4); however, uncertainty about the fit trend lines for the lunar views were quite small (~0.1 percent for all bands). Second, uncertainties in the MOBY water-leaving radiances (Lw(λ)) involve both the MOBY spectrometer calibration and the propagation of the subsurface radiances through the water column and the air-sea interface. Brown et al. (2007) provide the contribution of each to the Lw(λ) error budget, with the total uncertainty in Lw(λ) ranging from 2.1 to 3.3 percent depending on the spectral band. The Lw(λ) contribution to the top of the atmosphere radiance is typically 10 percent for oligotrophic waters and clear atmospheres, which are typically found where MOBY has been deployed. Thus the Lw(λ) uncertainty is equivalent to 0.21 to 0.33 percent at the top of the atmosphere. Third, uncertainties in the vicarious calibration of gain factors for individual time points were often large (~1 percent; Franz et al., 2007) and are primarily due to uncertainty in the atmospheric corrections (Gordon, 1997; Ahmad et al., 2010). After evaluating many (>50) independent estimates, the uncertainty in the mean gains (standard errors about the mean) are ~0.1 percent (Table 1 in Franz et al., 2007). It is interesting to note that the largest source of uncertainty to the SeaWiFS calibration budget is from the vicarious calibration source used.
In December 1999, MODIS followed SeaWiFS on the Earth Observing System (EOS) Terra spacecraft and in May 2002, on EOS Aqua. Each had a design life of five years (Esaias et al., 1998). Both remain operational after 11 and 8 years on-orbit, respectively. MODIS addresses atmosphere, land, and ocean research requirements; the Aqua sensor continues SeaWiFS ocean color capability.
Unfortunately, the Terra MODIS sensor has major limitations in its application of ocean color products because of poor radiometric and polarization stability (Franz et al., 2008). The recent reprocessing of Terra MODIS (January 2011) was only possible because the entire dataset was vicariously calibrated using SeaWiFS observations. These difficulties with Terra MODIS highlight the need for a stable and well-characterized ocean color sensor.
Nine of 36 MODIS spectral bands are within the visible range matching SeaWiFS, with the exception of slight changes in bandpass (see below). The MODIS sensor includes for the first time spectral bands that detect the chlorophyll fluorescence line height from satellite orbit (Letelier and Abbott, 1996; Behrenfeld et al., 2009). Like SeaWiFS, MODIS is able to measure the low-signal radiance from the ocean as well as the high-signal reflectance from land and clouds throughout the visible and near-infrared. Therefore, MODIS provides full atmosphere, land, and ocean spectral and radiometric coverage for a broad range of applications, including ocean color. Moreover, MODIS improves SeaWiFS calibration with a better solar diffuser, a solar diffuser stability monitor to compensate for solar diffuser changes over time, and a spectroradiometric calibration assembly that
monitors radiometric, spectral, and geometric image quality. MODIS also offers lunar views around a 54-degree phase angle (partial moon) for stability assessment. MODIS does not provide a tilt capability to reduce sun glint over the orbit, in principle (but not in practice), the two MODIS systems in complementary orbits (am and pm) were hoped to provide ocean color imagery that would avoid sun glint. Difficulties with MODIS on Terra made these plans unrealistic.
To a large extent, success of the SeaWiFS/MODIS era missions can be attributed to the fact that they incorporated a series of important steps, including: pre-flight characterization, on-orbit assessment of sensor stability and gains, a program for vicarious calibration, improvements in the models for atmospheric correction and bio-optical algorithms, the validation of the final products across a wide range of ocean ecosystems, the decision going into the missions that datasets would be reprocessed multiple times as improvements became available, and a commitment and dedication to widely distribute data for science and education (e.g., Acker et al., 2002a; McClain, 2009; Siegel and Franz, 2010).
Conclusion: SeaWiFS/MODIS’ success in producing high-quality data is due to the commitment to all critical steps of the mission, including pre-flight characterization, on-orbit assessment of sensor stability and gains, solar and lunar calibration, vicarious calibration, atmospheric correction and bio-optical algorithms, product validation, reprocessing, and widely distributed data for science and education.
It is important to identify each mission’s reasons for success and contribution to a long-term dataset of ocean biosphere parameters. Some of these lessons were available to inform the European MERIS mission or were confirmed as a result of the MERIS experience.
LESSONS FROM THE EUROPEAN MERIS MISSION
The European Space Agency’s (ESA) MERIS was launched on the Environmental Satellite (ENVISAT) platform in March 2002. The mission initially had a nominal five-year lifetime, which later was extended so that operations will continue until the end of 2013. MERIS was the first medium resolution optical imager dedicated to Earth observation that ESA conceived and launched.
The mission benefited from the experience that the European science community had gained through its engagement with the former CZCS and SeaWiFS missions, including participation on the SeaWiFS science team. The “Expert Support Laboratory” (ESL; i.e., the group of laboratories in charge of designing Level 1 and Level 2 data processing algorithms) and the “MERIS science advisory group” were formed and sufficiently engaged in advance to ensure that the mission, instrument, algorithms design, and implementation were appropriately developed. Because MERIS is a combined ocean color, land, and atmosphere (clouds) mission, a certain degree of compromise on the design of the instrument and mission was required. This included the specification of sensitivity levels for ocean color applications while maintaining a high dynamic range, as is the case in general with the design of combined sensors such as MODIS or VIIRS. Nevertheless, because the ocean color mission was a priority, important ocean color-driven requirements were met. The MERIS instrument was carefully designed and characterized (a joint activity of ESA and the instrument manufacturer). Consequently, there were no unexpected post-launch instrumental problems, and the result was a very stable and within-specification instrument providing high-quality global data. The careful pre-launch characterization played a critical role in the sensor’s success. The early experience with MERIS illustrates two important lessons: (1) international collaboration is an important aspect of achieving high-quality missions; and (2) scientific and technical expert groups need to be formed and engaged from the start and maintained so their expertise can be efficiently and rapidly available for new missions.
After launch, two groups were setup: the “MERIS Quality Working Group” and the “MERIS Validation Team,” which have continuously monitored the quality of the Level 1 and Level 2 products and introduced significant improvements to the processing algorithms throughout the mission. These groups recognized the importance of supporting users with dedicated and freely available tools (e.g., BEAM) from the beginning of the mission. These tools were made available as open source software, enabling users to work with and exploit MERIS data without the need to develop their own software to read the products. The open source software enabled users to actively participate in the evolution of the software; in fact, users provided many processors at no cost to the broader MERIS community.
However, in spite of its high-quality data, some elements of the MERIS mission have prevented it from becoming as popular in the international ocean color community as the SeaWiFS and MODIS missions. One reason was an initial data policy that was relatively restrictive, combined with the lack of an appropriately designed and dimensioned data distribution system. Another reason was the absence of gridded global Level 3 products. These obstacles were not due to ESA’s reluctance to distribute data but were an outgrowth of ESA history. Indeed, it was not the objective of most previous ESA missions to provide global datasets. Users were appropriately served with limited numbers of individual instrument scenes. However, the oceanography community needs global or at least regional- to basin-scale products. This experience demonstrates that data have to be freely distributed and easily accessible in large amounts and in a format that allows at least basin-scale studies, and ideally, global-scale studies. In addition, gridded Level 3 data are essential to ensure the data can be used efficiently in all of applications. These datasets are necessary to immediately demonstrate the success of the mission and to trigger the
science community’s interest, which in turn encourages the wide use of the data.
Another specific aspect of MERIS was the absence of a vicarious calibration strategy due to ESA’s limited experience with ocean color at the start of the mission design. The mission was conceived with a six-month commissioning phase, after which the instrument was supposed to be calibrated for the rest of the mission without need for further intervention. However, validation activities after the launch demonstrated that the data accuracy was not within requirements (Zibordi et al., 2006; Antoine et al., 2008). This discovery led to acknowledgements by ESA teams that an introduction of vicarious calibration was mandatory. Vicarious calibration was therefore part of the third mission reprocessing carried out at the beginning of 2011.
Conclusion: The MERIS experience illustrates the importance of having a vicarious calibration strategy in place before launch and maintained over the mission lifetime. In particular, a calibration strategy needs to include instrumented sites providing high-accuracy field data.
ESSENTIAL REQUIREMENTS FOR SUCCESS
Ocean color remote sensing is challenging, as the experiences with CZCS, SeaWiFS, MODIS, and MERIS have shown. To arrive at sufficiently accurate products requires significant effort and a dedicated group committed to going above and beyond simply collecting satellite images. For example, because the water-leaving radiance is such a small fraction of the total radiance detected by the sensor, the radiometric calibration and stability of the sensor has to be known to unprecedented accuracies, and the calibration and the stability of the sensor has to be assessed on-orbit (i.e., they cannot be assessed with sufficient accuracy before launch). From the start, planning for a successful mission needs to integrate all aspects of the mission (Figure 3.1). Lessons from previous ocean color missions highlight the importance of the steps depicted in Figure 3.1 (pre-launch tests, stability monitoring, vicarious calibration, product and algorithm validation with in situ data, data processing/reprocessing and improved products/algorithms, and mission feedback).
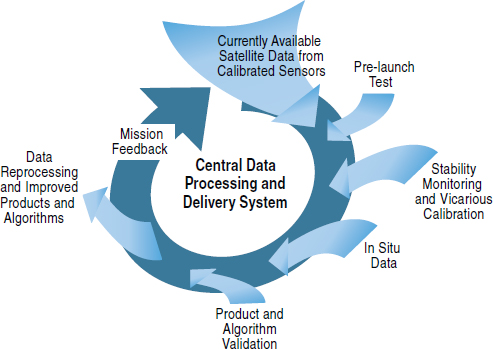
FIGURE 3.1 To improve the derivation and ensure the high quality of water-leaving radiance from multiple satellite sensors a single group needs to be responsible for the following: conduct sensor pre-launch tests, ensure that the sensor’s stability is monitored throughout the mission, perform a vicarious calibration, collect in situ data for product and algorithm validation, perform the validation, and routinely process and reprocess the data to improve the products. Once the high-quality water-leaving radiance is produced, users can develop and derive primary and secondary products that satisfy specific requirements of their research or operations. The lessons learned from these steps need to inform and guide current and future missions (adapted from McClain et al., 2002). The ocean color sensor’s design needs to include a plan for both pre-launch and on-orbit performance characterization. Furthermore, sequential reprocessing of ocean color data requires both pre-launch characterization of the system, commitments to conduct on-orbit assessments of instrument performance throughout the mission, and support for the necessary research to improve the models used to derive successful ocean color data products. Hence, the requirements for an ocean color mission are multi-faceted and interconnected. Future plans should reflect this integration of requirements.
SOURCE: McClain et al., 2002; NASA’s Goddard Space Flight Center.
These and additional requirements for a successful mission are discussed in detail in the following sections.
1. Mission Planning Needs to Include Provisions to Meet All Requirements, Not Just Sensor Requirements
A key lesson from CZCS and SeaWiFS is that a successful ocean color mission requires that the team consider from the beginning all aspects of what it takes to develop high-quality ocean color products. For example, CZCS did not have the required in situ monitoring program to ensure high-quality data throughout the entire mission. Because of the delay in the SeaWiFS launch, additional time was available to build the critical infrastructure, which accounted in large part for the success of the mission. During the SeaWiFS and MODIS era, the requirements were strict for the top of the atmosphere (TOA) radiometric specifications for the satellite mission, and for the algorithms required for quantitative retrieval of ocean chlorophyll. The TOA specifications were designed to achieve a radiometric accuracy of at least 2 percent absolute (without vicarious calibration) and 1 percent relative (band-to-band; after vicarious calibration). The water-leaving radiances (Lw) in the blue band were to have an uncertainty of 5 percent or less, with a relative between-band precision of <5 percent and polarization sensitivity of <2 percent at all angles (Hooker et al., 1992; Hooker and McClain, 2000; McClain et al., 2006; McClain, 2009).
Experiences with SeaWiFS and other ocean color sensors show that, by following prescribed steps that begin with pre-launch sensor characterization and continue throughout the mission, these specifications and other key mission requirements can be met, as is illustrated in Figure 3.1 and in the following sections.
2. Sensor Design Needs to Consider the Calibration and Data Product Requirements When Weighing Engineering Trade-Offs
Sensor designs often attempt to meet the requirements for a diverse set of applications (see Chapter 2). Therefore, sensors vary in spatial resolution, specific spectral band centers, bandwidths, SNR and rated accuracies (see Appendix A), as well as data acquisition and timing. These variations make it challenging to combine data from different sensors to measure trends in ocean biology. Although there have been efforts to define “standard” ocean color sensor characteristics for general applications, establishing common standards may be impractical because sensors for different agencies and nations often serve different applications. However, it is useful to examine lessons from past sensors and the trade-offs of different design choices with regard to how well one can monitor the sensors’ behavior and stability pre- and post-launch (Table 3.1). Based on our examination, the committee is able to provide some simple guidelines for a minimal set of high-quality standards that all satellite sensors ideally would adhere to (Figure 3.2). Beyond that, one might also request that certain specifications and “metadata” be available for each sensor, so that researchers can evaluate the applicability of each source of satellite data to a given study topic.
The committee’s guidelines for achieving high-quality sensor performance fall into six general areas: Sensor stability, waveband selection, scan geometry, sun glint, sensor saturation, and polarization sensitivity. Explanations and recommendations are as follows:
Sensor Stability
The sensor’s stability and monitoring of that stability, is critical, as demonstrated during the SeaWiFS mission. The monitoring approach depends on the sensor design but needs to be an integral part of the overall mission (as discussed below). SeaWiFS also had a solar diffuser, but that data has not been used for temporal trending of the sensor performance because the mission allowed for monthly spacecraft pitch maneuvers to image the moon at a fixed lunar phase angle near full moon. MODIS relies primarily on the solar diffuser data and the diffuser stability monitor. MODIS also views the moon monthly through the deep space port, but at a higher phase angle (partial moon). VIIRS follows the MODIS strategy, but the deep space port is located such that the moon is near the horizon and is not visible most of the year without roll maneuvers (Patt et al., 2005).
Recommendation: Monitoring of the sensor stability should be an integral part of any ocean color mission from the start.
Waveband Selection
For the CZCS pilot study the 670-nm band had to be used for atmospheric correction because the 750-nm band was not sensitive enough for the task. Based on the CZCS experience, additional bands were added to SeaWiFS (see Figure 3.3). SeaWiFS was the first ocean color mission to use NIR bands to enable an atmospheric correction using a detailed inversion procedure (see below). This approach is used with MODIS and will be used for VIIRS.
MODIS also includes additional bands in the visible that can be used to quantify chlorophyll a fluorescence. Chlorophyll a fluorescence is unique in providing information about physiological states and biological activity. MODIS also has land remote sensing bands in the Short Wave Infrared (SWIR) that can be used in atmospheric correction in turbid water conditions (Wang et al., 2009). On MODIS, the 510-nm band (found on SeaWiFS) was replaced with a band centered at 532 nm, but this was found to be too highly correlated with the 555-nm band to be useful in deriving chlorophyll.
VIIRS is missing several key wavebands. It has neither the 510- nor the 532-nm band, which will make it harder to
TABLE 3.1 Key Sensor Characteristics
| CZCSa | SeaWiFSb | MODISc | MERISd | VIIRSe | ||
| Operational Dates | Oct. 1978-1986 | Sept. 1997-Dec. 2010 | Terra Dec. 1999-TBD Aqua March 2002-TBD | March 2002 - TBD | Launch 2012 | |
| Ocean Color Wavebands | 4 visible | 6 visible 2 NIR | 7 visible, 2 NIR, & 3 SWIR | 9 visible + 6 NIR | 5 visible, 2 NIR, & 3 SWIR | |
| Scan | 45° angle 360° rotating mirror ±40° scan (1,566 km swath) | 360° rotating telescope | 360° rotating paddle mirror | Push-broom imager | 360° rotating telescope | |
| Sun Glint Avoidance | ±20° fore-aft tilt mechanism (2° increments) | ±20° fore-aft tilt mechanism (2° increments) | Terra (1,030) Aqua (1,330) comparison | Nadir view; no sun glint avoidance | 1,330 (if available) comparisons | |
| Polarization Sensitivity | <3 percent, Scrambler | Scrambler | ~5 percent | <2 percent | <2 percent | |
| SNR | 100-150 | 360-1,000 | 1,250-2,700 | >600-1,400 | >1,000 | |
| Dynamic Range (Sensor Saturation) | Ocean only | Ocean, land, clouds via bi-linear gain control | Ocean only within ocean color bands; other similar cloud/land VNIR bands for bright scenes | Ocean color + land and clouds | Ocean, land, clouds via pixel instantaneous automatic gain control | |
| On-board Calibration | No | No | 2 solar diffusers plus an erbium-doped diffuser for spectral calibration | Yes | ||
| Monitoring of Stability | No | Yes | Yes | Yes (2 solar diffusers) | Hopefully | |
a CZCS: NASA. 2011. Ocean Color Web. [Online]. Available: http://oceancolor.gsfc.nasa.gov/CZCS/czcs_instrument.html [2011, June 7]; Hovis, W.A. et al. 1981. Nimbus 7 coastal ocean color scanner. Applied Optics 20:4175.
b SeaWiFS: Barnes, R.A. and A.W. Holmes. 1993. Overview of the SeaWiFS ocean sensor. In Sensor Systems for the Early Earth Observing System Platforms, Barnes, W.L. (ed.). Proceedings SPIE 1939:224-232; Barnes, R.A., R.E. Eplee, W.D. Robinson, G.M. Schmidt, F.S. Patt, S.W. Bailey, M. Wang, and C.R. McClain 2000. The calibration of SeaWiFS. In Proceedings of 2000 Conference on Characterization and Radiometric Calibration for Remote Sensing, Logan, Utah, September 19-21, 2000; Barnes, R.A., R.E. Eplee, Jr., G.M. Schmidt, F.S. Patt, and C.R. McClain. 2001. Calibration of SeaWiFS I. direct techniques, Applied Optics 40(36):6682-6700; Eplee, R.E., Jr., W.D. Robinson, S.W. Bailey, D.K. Clark, P.J. Werdell, M. Wang, R.A. Barnes, and C.R. McClain. 2001. Calibration of SeaWiFS. II. Vicarious Techniques. Applied Optics 40(36):6701-6718; Hammann, M.G. and J.J. Puschell. SeaWiFS-2: An ocean color data continuity mission to address climate change. In Remote Sensing System Engineering II, Ardanuy, P.E., and J.J. Puschell (eds.). Proceedings of SPIE 7458:745804.
c MODIS: Guenther, B., W. Barnes, E. Knight, J. Barker, J. Harnden, R. Weber, M. Roberto, G. Godden, H. Montgomery, and P. Abel. 1995. MODIS Calibration: A brief review of the strategy for the at-launch calibration approach. Journal of Atmospheric and Oceanic Technology 13:274-285; Schueler, C.F. and W.L. Barnes. 1998. Next-generation MODIS for polar operational environmental satellites. Journal of Atmospheric and Oceanic Technology 15:430-439.
d MERIS: Curran, P.J. and C.M. Steele. 2005. MERIS: The re-branding of an ocean sensor. International Journal of Remote Sensing 26:1781-1798.
e VIIRS: Schueler, C.F., P. Ardanuy, P. Kealy, S. Miller, F. DeLuccia, M. Haas, H. Swenson, and S. Cota. 2002. Remote sensing system optimization. Aerospace Proceedings 4:1635-1647; Schueler, C.F., J.E. Clement, P. Ardanuy, M.C. Welsch, F. DeLuccia, and H. Swenson. 2002. NPOESS VIIRS sensor design overview. In Earth Observing Systems VI, Barnes, W.L. (ed.). Proceedings of SPIE 4483:11-23.
retrieve chlorophyll concentrations in optically turbid waters. It is also missing the chlorophyll fluorescence bands and sensitive SWIR bands. It is critical to have the appropriate bands for the atmospheric correction. SeaWiFS NIR SNRs were too low, whereas those of MODIS and VIIRS are acceptable. SWIR bands are useful in turbid waters; both MODIS and VIIRS SWIR bands have low SNRs (higher SNR is recommended). To retrieve chlorophyll a fluorescence line height (Letelier and Abbott, 1996; Behrenfeld et al., 2009), a narrow(10 nm) band is needed near the fluorescence peak (MODIS uses 678 nm to avoid atmospheric absorption features) and bands on either side of the fluorescence peak (MODIS uses 667 and 748 nm).
One major issue plaguing ocean color imagers is the separation of algal and non-algal absorption coefficients from ocean color signals, especially as the climate changes. Existing methods (Lee et al., 2002; Siegel et al., 2002, 2005a,b; Morel, 2009; Morel and Gentili, 2009) all leverage their
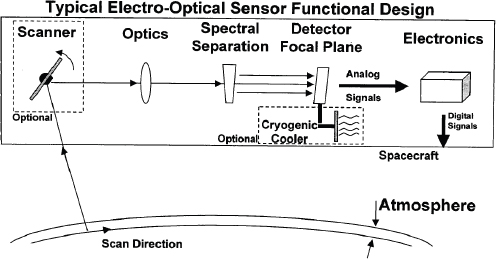
FIGURE 3.2 Ocean color sensor functional elements. This figure uses the example of a scanner to illustrate the fundamental sensor design elements comprising an EOS sensor for ocean color (or other) applications.
SOURCE: Acker et al., 2002a.
success from differentiating the colored dissolved organic matter (CDOM) absorption signal from the algal absorption based on information from a single channel, 412 nm (Lee et al., 2002; Maritorena et al., 2002; Morel and Gentili, 2009). The present operational algorithm for SeaWiFS and MODIS uses four wavelengths to derive chlorophyll concentrations. A single band for discriminating non-algal absorption, such as CDOM, limits the assessment of portioning uncertainty (there is only one degree of freedom). CDOM absorption, the major constituent that needs to be portioned from phytoplankton absorption, increases with shorter wavelengths, and CDOM dominates the absorption spectrum in the near-ultraviolet (UV; Nelson and Siegel, 2002; Nelson et al., 2010). Present plans for PACE and Aerosol-Cloud-Ecosystems (ACE) include wavebands in the near-UV (350, 360, and 385 nm) to better enable this partitioning.1 Inclusion of several bands in the near-UV would help in separation of algal and non-algal ocean color signals.
Bands in the near-UV likely will be important for improving atmospheric correction procedures. Absorbing aerosols have long confounded existing atmospheric correction methods, as these methods require that aerosol contributions in the visible spectrum can be modeled by knowing NIR aerosol radiance characteristics (Gordon and Wang, 1994a; Gordon, 1997). The presence of absorbing aerosols, generally from land sources (pollution, dust, etc.), makes atmospheric correction models fail under such conditions (Gordon, 1997; Gordon et al., 1997; Moulin et al., 2001). The near-UV provides a path for correcting for absorbing aerosols because the atmospheric signals in the near-UV are much stronger than ocean color signals.2 With this new information, future atmospheric correction/ocean color algorithms likely will be coupled inversions similar to those trailblazed by Professor Howard Gordon and his students (e.g., Chomko and Gordon, 2001; Chomko et al., 2003).
To ensure continuity of Type 1 ocean color observations, a minimum band-set needs to be maintained on future sensors. The ideal Type 1 sensor would have at minimum the following bands in the visible: 412, 443, 490, 510, 555, 667, 678, and 765 nm, which is a combination of the bands present on SeaWiFS and MODIS (SeaWiFS = 412, 443, 490, 510, 555, 675 nm; MODIS = 412, 443, 490, 531, 555, 667, 678, and 748 nm). As described above, two channels in the near-UV would be useful for partitioning algal and non-algal absorption optical properties and for implementing new algorithms for absorbing aerosols. The ACE science team recommends bands centered on 360 and 385 nm for these purposes; the committee supports this finding. In addition, the sensor would require some SWIR and NIR bands in the atmospheric “windows.”
Recommendation: Spectral band-sets for sustaining existing ocean color capabilities should be at least as complete as the SeaWiFS band-set, preferably with improved SNR values, SWIR bands with improved SNR values for atmospheric corrections in turbid waters, the ability to retrieve chlorophyll a fluorescence, and near-UV bands for improving the partitioning of algal and non-algal ocean color signals and for implementing new approaches in atmospheric correction.
____________________________
1 ACE 2010 White Paper. Available at: http://www.neptune.gsfc.nasa.gov/.../ACE_ocean_white_paper_appendix_5Mar10.doc.
2 ACE 2010 White Paper. Available at: http://www.neptune.gsfc.nasa.gov/.../ACE_ocean_white_paper_appendix_5Mar10.doc.
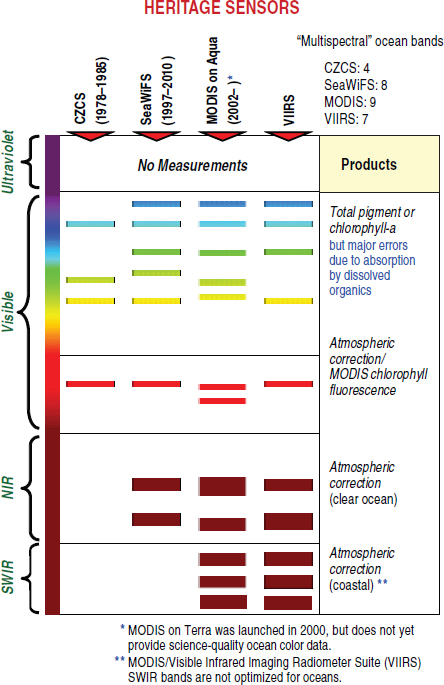
FIGURE 3.3 Comparison of spectral coverage of heritage sensors.
SOURCE: Adapted with permission from Charles McClain, NASA/Goddard Space Flight Center.
Scan Geometry
Sensor scan geometry impacts the reprocessing of ocean color data. SeaWiFS and MODIS reprocessing differ based on their different scan geometry. SeaWiFS used a rotating telescope to provide a cross-track scan, and detectors in one spectral band see different geometry because they are aligned along-scan and read out sequentially as the telescope rotates.
Different spectral bands are displaced along-track (cross-scan), however, so that all bands are read out with the same scan geometry at any Earth location. MODIS uses a cross-track scan mirror. The MODIS detectors in a spectral band are aligned cross-scan (along-track) so that they are read out simultaneously at the same scan mirror position at any Earth location. Different spectral bands on the same MODIS focal plane (e.g., ocean color bands) are read out at different times so that the scan mirror is at a different angle for each band at any Earth location. This affects reflectance and vicarious calibration differently than for SeaWiFS, and complicates the calibration procedures for MODIS compared with SeaWiFS.
Conclusion: When designing a new sensor, it is important to consider how the sensor’s design may impact the vicarious calibration and periodic data reprocessing.
Sun Glint
Sun glint comes from the reflection of sunlight from the ocean’s surface into the viewing path of the sensor. Retrievals of Lw are nearly impossible for those illumination and viewing angles contaminated by sun glint (Gordon and Wang, 1994b). Existing ocean color algorithms exclude pixels found within the sun-glint pattern (Wang and Bailey, 2001). Sensor and mission design can help mitigate these issues. The CZCS and SeaWiFS sensors were both tilted away from the sun’s specular path by 20 degrees to avoid sun glint. MODIS (and VIIRS) is nadir-looking (i.e., without a tilt looking straight down) (Table 4.1). Thus, sun glint contaminates much of MODIS’s viewing geometry under high zenith angle conditions such as found in the tropics near noon. This limits the effective spatial coverage by MODIS in the tropical oceans (Gregg et al., 2005; Maritorena et al., 2010). The plans for avoiding sun glint for the two MODIS missions were to use observations from different equatorial crossing times. This approach is problematic as it assumes that MODIS on Terra and Aqua produce similar data streams and that a vicarious calibration for both can still be achieved.
Recommendation: Future ocean color sensors should avoid sun glint by tilting the sensors’ viewing away from sun-glint contaminated regions of the oceans.
Sensor Saturation
Avoiding sensor saturation presents a challenge because the signal from clouds and the atmosphere is very high compared with the signal from the ocean. Because most (>90 percent) of the signal detected by the satellite stems from light scattered in the atmosphere, successful ocean color remote sensing depends on correcting for the radiance from the atmosphere. Therefore, measurements of atmospheric signals in both ocean color and aerosol bands are required. Avoiding saturation while also providing sufficient signal sensitivity in the ocean color bands requires either dual simultaneous measurements in each band, or dual-gain, preferably with instantaneous automatic gain control. Dual-gain band offset and gain coefficients differ for each gain. The coefficients are downlinked with the raw data and a flag indicating the gain the detector was in when the measurement was made. Then the offset and gain coefficients are applied to achieve <2 percent radiometric error. Short-term (in the order of a second) detector response instability may cause a small intra-scan, temporally varying, offset and gain coefficient error (affects single- and dual-gain bands). Vicarious calibration is, as shown in Appendix B, insensitive to offset and gain error and therefore insensitive to instability. Therefore, vicarious calibration is applied for ocean color applications to achieve overall levels of radiometric uncertainties of 0.3 percent or less.
SeaWiFS used a bi-linear gain feature that worked adequately for eliminating saturation over all targets, whereas MODIS employs two independent channels in each such band, one at high gain with lower dynamic range for ocean color, and the other with low gain and high dynamic range. VIIRS uses a single dual-gain channel for each band with automatic gain control.
Recommendation: The ocean color sensor design should ensure that saturation can be avoided under any environmental conditions, yet resolve ocean color signals for the effective retrieval of water-leaving radiance spectra.
Polarization Sensitivity
Minimal polarization sensitivity is required. Many of the problems with the processing of MODIS-Terra imagery are related to the time-dependent polarization sensitivity (Franz et al., 2008; Kwiatkowska et al., 2008). Some refinements of the MODIS-Aqua characterization using the same technique were needed in the most recent reprocessing, but the corrections were much smaller than for MODIS Terra. However, use of a polarization descrambler precludes the simultaneous viewing of thermal infrared bands, as is done now in MODIS and VIIRS. Most recently, requirements for polarization sensitivity are <1 percent.
Recommendation: Future ocean color sensors should minimize the polarization sensitivity and residual polarization should be adequately characterized in pre-launch testing.
3. The Sensor Has to Be Well Characterized Prior to Launch
The SeaWiFS and MODIS missions demonstrated the importance of pre-launch sensor characterization because many factors needed for data processing cannot be easily characterized in orbit (McClain et al., 2006). These factors include temperature effects, stray light, optical and electronic cross-talk, band-to-band spatial registration, relative spectral and out-of-band response, signal-to-noise ratios, electronic gain ratios, polarization sensitivity, response versus scan angle, and any instrument specific items, such as selective detector aggregation, that can impact sensor response (McClain et al., 2006). Because it is often impossible to deconvolve sources of error post-launch, these attributes need to be determined prior to launch.
These characteristics vary greatly from sensor to sensor. For example, MODIS, unlike SeaWiFS, has multiple detectors per spectral band and the radiometric and polarization sensitivity is specific to each detector. Measurements of MODIS’s polarization sensitivity were questionable and led to a seasonal latitude- and time-dependent error in the retrieved water-leaving radiances (NASA, 2009a). An important part of the characterization process is to allow for free and open discussions between the vendor, representatives of
the sponsoring agency and experts from the user community. For both MODIS and SeaWiFS, productive interchanges between vendor, agency, and user community resolved problems prior to launch, and also post-launch as part of reprocessing efforts. These discussions also effectively leveraged the vendor personnel’s knowledge of the sensor with the agency personnel’s knowledge of algorithm development and cal/val needs.
Because VIIRS was procured as a performance-based contract, it minimized such interactions between vendor and agency personnel. Many initial issues with the VIIRS sensor set to launch on National Polar-orbiting Operational Environmental Satellite System Preparatory Project (NPP) were due to pre-launch characterization results that did not meet specifications. Subsequent testing and end-to-end system testing performed after VIIRS was mated with the NPP spacecraft have shown much better performance characteristics for VIIRS. Some of these discrepancies were due to differences in the test facilities used to test and characterize VIIRS (Turpie, 2010). This demonstrates that test facilities themselves must be adequately designed and tested for the pre-launch characterization of ocean color sensors. Further, International Traffic in Arms Regulations (ITAR)3 restrictions have prohibited open access to the test program dataset for VIIRS. Such restrictions could seriously compromise the ability of the U.S. community to acquire similar information for foreign sensors. Similar concerns exist about “trade secrets” that would prohibit instrument vendors from openly sharing instrument design information with all affected parties.
Because any ocean color sensor will need repeated vicarious calibrations, the pre-launch absolute radiometric calibration is not as critical, and pre-launch absolute radiometric calibration uncertainties of ~5 percent may be acceptable. This relaxing of requirements would help constrain instrument costs.
Recommendation: An aggressive pre-launch characterization program should be in place for those factors that are not easily adjusted on-orbit with validated test facilities.
Recommendation: Open communication and frequent interactions among the sensor vendor, agency personnel, and the relevant instrument team should be pursued to efficiently leverage knowledge and quickly identify design and algorithm solutions.
4. Vicarious Calibration Is Required to Achieve On-Orbit Accuracy Goals
Although satellite sensors are calibrated prior to launch, their calibration coefficients likely change during the storage period prior to launch, during the launch, and in orbit while exposed to the hostile space environment. This potential for change requires a post-launch assessment and adjustment of the pre-launch calibration coefficients. The standard and most reliable procedure to achieve such an assessment is a vicarious calibration (Franz et al., 2007; McClain, 2009; see also Appendix B). Vicarious calibration is a process to calibrate a satellite ocean color sensor after launch that begins with high-quality in situ measurements of Lw at the same wavelength band (preferably also accounting for the out-of-band response) as for the satellite sensor. Because the Lw signal reaching a satellite ocean color sensor is small compared to the contribution of backscattered atmospheric radiances, vicarious calibration of satellite ocean color sensors also requires that the Lw signal be accurately propagated via models and calculations from the ocean surface, through the atmosphere and to the satellite sensor. Accurately propagating the Lw signal to satellite altitudes is easier and more accurate at locations where the contribution of the most variable optically active components of the atmosphere (e.g., aerosols) are small, or at worst, sufficiently well-characterized. Thus, the location of vicarious calibration sites is critical. Experience with SeaWiFS and MODIS shows that many observations (at least 50; see also Appendix B) are required before stable and accurate values can be determined for adjusting the calibration coefficients of the satellite sensor (Franz et al., 2007). Because of sun-glint contamination, nadir-viewing ocean color missions will take much longer than tilting sensors to achieve a sufficient number of calibration match-ups.
Given the strict accuracy requirements, field instruments used for vicarious calibration have to measure Lw with accuracy on the order of a few percent to implement quantitative algorithms (e.g., McClain et al., 2004). This accuracy is extremely difficult to achieve and requires high-quality in situ instrumentation, accurate models to correct for atmospheric path radiance, and a rigorous process for both acquiring the in situ measurements and for matching the in situ and satellite measurements. This requirement for field observations was achieved for SeaWiFS and MODIS using MOBY (Clark et al., 2002; see Appendix B). MOBY has been extensively characterized using National Institute of Standards and Technology (NIST) resources and is well suited to understand the in-band, out-of-band, and cross-talk responses of the MOBY instrument, permitting proper deconvolution of these signals to obtain the true water-leaving radiance spectrum (Carol Johnson, personal communication; see Appendix B). A dedicated team for developing and maintaining these standard measurements is critical, given the need to maintain strict accuracy over the duration of the
____________________________
3 The International Traffic in Arms Regulations (ITAR) pertain to export and import of ITAR-controlled defense articles, services, and technologies. It also protects export/import of technology pertaining to satellites and launch vehicles. As a result, some information exchange related to sensor pre-launch and post-launch calibrations could be restricted by ITAR (NRC 2008c: Space Science and the International Traffic in Arms Regulations: Summary of a Workshop).
satellite mission and beyond (to use these measurements for satellite data inter-calibration).
The approach with MOBY was to develop and implement a robust, rigorous facility to support continuous in situ measurements of water-leaving, spectrally continuous (i.e., hyperspectral) radiances. From hyperspectral measurements, one can synthesize the band-set of any satellite ocean color sensor. The buoy approach was based on the lessons learned from the CZCS mission, during which measurements for the vicarious calibration were performed from ships during the early phase of the mission. MOBY operates 365 days a year, taking measurements three times a day, timed with the overpasses for SeaWiFS and MODIS-Aqua and -Terra. From July 1997 to February 2007, 8,347 measurements were made. However, it is not possible to have a satellite match-up for every MOBY observation (Franz et al., 2007). Clouds obscure satellite views of the ocean. In general, clouds build up during the afternoon, which means the satellite orbital parameters influence the number of useful match-ups. Clouds are one rejection criteria for match-ups between MOBY and satellite sensors; other limiting factors include instrument problems. Of the 8,347 measurements collected during the one-year interval ending in February 2007, about 45 percent of the data were cloud contaminated. About 10 percent were flagged as questionable, and 45 percent were good. During the beginning of the SeaWiFS mission, every possible match-up was utilized (Eplee et al., 2001). As the research of the SeaWiFS calibration continued, the selection criteria were improved and a reduction in the number of match-ups was justified, but it took almost four years to get the 30 match-ups that meet the current criteria. The Ocean Biology Processing Group (OBPG) at NASA’s Goddard Space Flight Center (GSFC) excludes data if: 1) the two measures of the water-leaving radiance that are derived from the three different depths using MOBY disagree by more than 5 percent; or 2) the measured surface irradiance differs from a clear-sky irradiance model by more than 10 percent. Satellite sensor datasets are excluded if: (1) there are any flagged (suspicious) pixels in the image; (2) the mean chlorophyll-a concentration retrieved for the scene is greater than 0.2 mg/m3, which is unusually high for such oligotrophic waters found at the MOBY site; (3) the retrieved aerosol optical thickness in the near-infrared is greater than 0.15 (note this could be an indicator of sun-glint contamination, not actual aerosol contribution); (4) the satellite view angle is greater than 56 degrees; or (5) the solar zenith angle is greater than 70 degrees (Franz et al., 2007). These criteria resulted in only 15 match-ups per year over nine years of MOBY/SeaWiFS continuous operations (Franz et al., 2007).
Franz et al. (2007) conclude that it would take two to three years of continuous in situ operations in order to establish the calibration of an ocean color sensor with characteristics similar to SeaWiFS. However, it should be pointed out that the nature of the SeaWiFS degradation was straightforward to model and to predict, and there were frequent lunar observations at the same phase angle. In general, it cannot be assumed that the degradation is straightforward to model or that frequent match-ups are available due to sun-glint issues. For nadir-viewing ocean color missions such as MODIS and VIIRS, the calibration will take much longer because of sun-glint contamination. The contributions of uncertainties in the MOBY water-leaving radiance (Lw(λ)) determinations to the vicarious calibration involve both the MOBY spectrometer calibration and the propagation of the subsurface radiances through the water column and the air-sea interface. Brown et al. (2007; Table 5) showed that the total uncertainty in MOBY determinations of Lw(λ) under excellent conditions ranged from 2.1 to 3.3 percent depending on the spectral band. The Lw(λ) contribution to the top of the atmosphere radiance is typically 10 percent for oligotrophic waters and clear atmospheres, which are typically found where MOBY has been deployed. Thus, the Lw(λ) uncertainty to TOA radiance is equivalent to 0.21 to 0.33 percent at the top of the atmosphere, the major source of uncertainty to the SeaWiFS overall uncertainty budget.
Based on lessons learned from SeaWiFS, MODIS, and other sensors, vicarious calibration has to meet certain criteria. The site needs to be in oligotrophic waters but accessible without excessive ship costs. Islands are the logical choice but clouds form around islands—for example, on the windward side of Hawaii, with its high mountain ranges. The leeward side is a better option. The site requires extensive characterization, including optical, biophysical, and biogeochemical, and this requires experienced researchers and ship time to measure, for example, the bi-directional reflectance distribution function. The ideal site would provide a nearby facility for maintenance and related functions including: refurbishment, in-field servicing, improvement of the hardware of the optical buoy and the mooring buoy, radiometric characterization, and pre- and post-deployment calibration for the in situ instrument. In addition, data analysis and data archiving are critical aspects of the vicarious calibration facility operations.
Conclusion: The importance of a vicarious calibration cannot be overstated. Based on empirical studies conducted over the past 15 years with ocean color as well as atmospheric and land data, NIST has determined that vicarious calibration, using surface-truth measurements to compare with satellite measurements, is necessary to calibrate the sensor after the launch, including setting/re-setting the instrument gain factors.
Conclusion: MOBY or a MOBY-like effort is necessary for the continuation of ocean color climate data records. Although other approaches might produce acceptable vicarious calibration data, they have not been widely implemented or deployed operationally. MOBY is currently the accepted standard for a vicarious calibration source and is already deployed. Further, non-U.S. sensors (such
as MERIS) use MOBY as a vicarious calibration source, which will make it easier to link U.S. and international datasets.
Conclusion: To maintain SeaWiFS accuracies in retrieving water-leaving radiance, a sensor’s overall uncertainty level for calibration gains needs to be constrained below 0.3 percent (see Appendix B). This can only be accomplished by a vicarious calibration, which needs to begin at the start of the mission to achieve this accuracy.
5. Stability Monitoring: Lunar Calibration or Another Proven Mechanism for Stability Monitoring Is Required to Achieve Radiometric Stability Goals
In addition to vicarious calibration, temporal changes in sensor radiometric calibration need to be determined throughout the mission, and corrections need to be made for observed rate of degradation, to ensure high-quality ocean color data (e.g., Eplee et al., 2004; McClain, 2009). The experience with SeaWiFS shows that different spectral channels degrade at different rates (Figure 3.4) and independent corrections must be applied to each spectral band.
Because of the success of the SeaWiFS lunar imaging-based stability monitoring, this methodology has been incorporated into the MODIS on-orbit performance analyses and adopted by other missions prior to launch, e.g., Ocean Colour Monitor on-board Oceansat-2 (OCM-2). It should be noted that this is a relative measurement, not an absolute calibration. MERIS employs an alternative approach using two solar diffusers: one with frequent solar observations to monitor the sensor stability, and a second diffuser with infrequent solar observations to monitor the degradation of the first. Multiple concurrent solar diffusers are important for assessing impacts of stability if the moon is not used as the standard. In addition to lunar views, solar diffusers may be required for stability monitoring of sensors such as MERIS that have multi-detector imagers, because lunar views image only a small portion of the observed area and include only a few detectors. The advantage of using the moon directly as a stability source is that the relatively weak and diffuse sunlight radiance reflected from the moon can be viewed directly through the same optics as the ocean, i.e., without using a diffuser or separate optical path to the satellite sensor. This minimizes concerns that diffuser characteristics can change during the satellite mission. In addition, observing the moon has the advantage of providing sensor observations acquired at radiance levels more nearly equivalent to top of the atmospheric Earth-viewed radiance.
For both SeaWiFS and MODIS-Aqua, individual spectral channels degraded at different rates with time (Figure 3.4). Over the first nine years of SeaWiFS observations, the 865-nm band degraded the most (18 percent). In contrast, for MODIS-Aqua, a sensitivity loss of 15 percent at 412 nm during a four-year period was the most for any of Aqua’s ocean color bands (McClain et al., 2006). The relatively rapid and significant degradation of the SeaWiFS 865-nm band relative to the other spectral bands would have made accurate atmospheric correction difficult if not impossible to implement without applying the degradation corrections. It is equally important that the degradation be determined throughout the mission. An example is that while the SeaWiFS 865-nm band followed a well-characterized pattern during the first nine years of on-orbit operations, it subsequently changed its decay trend. Without ongoing measurements of sensor degradation, this important change in behavior would not have been detected, leading to deterioration of product accuracy.
Importantly, the deviations in the SeaWiFS lunar calibration observations from the fit equations used to correct for sensor drift are very small, here less than 0.1 percent. Note that the level of uncertainty in the stability characterization is less than the uncertainty in the vicarious calibration (see Appendix B) and points to the excellent qualities of the moon as a stability source for ocean color sensor characterization.
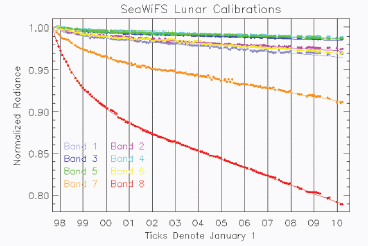
FIGURE 3.4 SeaWiFS lunar calibrations (Patt, personal communication, 2010). Deviations from the fitting functions are less than 0.1 percent for all bands.
SOURCE: Ocean Color Biology Group, NASA’s Goddard Space Flight Center.
Conclusion: Stability monitoring is of highest priority. Monitoring instrument stability can constrain the sensor changes within 0.1 percent by viewing an appropriate source (such as the moon).
Recommendation: Future ocean color sensors should view the moon at least monthly through the Earth-view port to monitor the sensor’s stability throughout its mission.
6. Mission Overlap Is Essential to Transfer Calibrations between Sensors (e.g., SeaWiFS was used to help transfer calibrations to MODIS)
Mission overlap was essential for enabling high-quality ocean color data from both the MODIS-Aqua and MODIS-Terra sensors. The calibration for MODIS, an instrument that shares a number of challenging design features with VIIRS, is complicated. It was fortunate that observations from SeaWiFS were available, with its well-studied calibration and product validation history and a sensor based on a simple design (e.g., constant angle of incidence scan system vs. MODIS variable angle incidence scan). Water-leaving radiances derived from SeaWiFS observations were employed as reference radiances to study the seasonal, latitudinal, cross-scan, and polarization behavior of the water-leaving radiances for MODIS on Aqua and Terra (Kwiatkowska et al., 2008; NASA, 2009b). These comparisons served to validate the various corrections used to determine the actual MODIS-Aqua polarization response. Eventually, MODIS-Aqua and SeaWiFS Lw converged. However, without access to well-characterized SeaWiFS products that had been validated against extensive in situ observations, accurate MODIS-Aqua Lw would not have been achieved. This underscores the justification for extensive pre-launch characterization.
Mission overlap also was required to assess the high quality of the MODIS-Terra dataset, which was complicated by time-dependent changes in the gains and polarization sensitivity as a function of scan angle (Kwiatkowska et al., 2008). Given these sources of uncertainty, the retrieval of climate-quality water-leaving radiance observations from the MODIS-Terra mission was possible only after comparison with near simultaneous data from SeaWiFS and MODIS-Aqua. To best account for these sources of uncertainty, a vicarious calibration procedure was employed for MODIS-Terra, using SeaWiFS as truth, to simultaneously correct for the time-dependent changes in gains and polarization sensitivity (Kwiatkowska et al., 2008; Franz et al., 2008). This demonstrates the utility of simultaneous satellite observations to best characterize on-orbit changes in instrument responses. This methodology of comparing multiple satellites also has been used in the on-orbit assessments of MODIS-Aqua responses (NASA, 2009b). We must also note the unfortunate fact that the VIIRS mission will not overlap with SeaWiFS.
Recommendation: New satellite missions need to demonstrate that their Lw measurements are consistent with those obtained by prior missions, particularly prior missions for which considerable validation and vicarious calibration data were obtained. This is an essential requirement for developing sustained ocean color time-series for scientific analyses.
7. End-to-End Validation of Ocean Color Products Is Critical and a Key Step in the Reprocessing of Ocean Color Data Products
Validation programs4 are required to ensure that the algorithms that generate data products from satellite radiances are credible with data users and that the models and procedures used to process the datasets are working appropriately. Validation is also a key step in the reprocessing of ocean color data products (Figure 3.1). Algorithm development is an active area of research conducted by many independent research labs. To take advantage of community findings, an effort is required to compare and validate various algorithms and products. Validation programs for SeaWiFS and MODIS included comparisons of satellite with in situ Lw, i.e., comparisons of derived ocean color data products such as chlorophyll, particulate organic carbon (POC), particulate inorganic carbon (PIC), and CDOM with in situ data, and comparisons of aerosol characteristics used to correct for the atmospheric path radiance with field observations. Validation requires match-up datasets that can be used to compare satellite data performance with field observations (Bailey and Werdell, 2006). Given the high costs of ship time and other fixed costs, ideal validation programs produce comprehensive ocean-atmosphere datasets to meet multiple purposes. Appendix C describes the measurements needed for comprehensive datasets. Validation of aerosol data products is as essential as validation of in-water properties. For SeaWiFS and MODIS, aerosol validation was provided by measurements from a network of sun photometers (Knobelspiesse et al., 2004). The results of these comparisons are then used to assess how to improve the data products through iterative changes to sensor calibration and/or retrieval models (Figure 3.1).
To facilitate the algorithm development and data product validations for SeaWiFS, the Goddard Ocean Color Data Reprocessing Group maintains a repository of in situ marine bio-optical data, the SeaWiFS Bio-optical Archive and Storage System (SeaBASS; seabass.gsfc.nasa.gov). The acquisition and analysis of the in situ measurements has been an international collaboration (e.g., the Atlantic Meridional Transect program), which greatly enhances the global distribution of data in SeaBASS. Acquisition of these observations
____________________________
4 “Validation is the process of determining the spatial and temporal error fields of a given biological or geophysical data product and includes the development of comparison or match-up data set.” From http://www.ioccg.org/reports/simbios/simbios.html.
is time consuming and resource intensive; sharing of data and resources across the community is vital to obtain adequate coverage in space and time. These data were used to compile a large set of pigment concentrations, biogeochemical variables, and inherent optical properties. This new dataset, the NASA bio-Optical Marine Algorithm Dataset (NOMAD), includes more than 3,400 stations of Lw, surface irradiances, and diffuse downwelling attenuation coefficients. Metadata, such as the date, time, and location of data collection, and ancillary data, including sea surface temperatures and water depths, accompany each record (Werdell and Bailey, 2005). Global data coverage is needed to create global bio-optical algorithms, to test their performance in particular regions, and to develop regionally specific algorithms.
Conclusion: To derive and validate the desired ocean color data products from water-leaving radiance, in situ data representing the range of global ocean conditions is needed for algorithm development and product validation. These in situ data need to be collected, properly archived and documented, and widely available through a database such as SeaBASS. The global requirements of this database suggest that these data are to be shared among all international participants.
Conclusion: All ocean color missions require product validation programs as a key step in the reprocessing of ocean color observations and to establish uncertainty levels for ocean color mission data products.
8. Satellite Ocean Color Products Need Continual Reprocessing to Assess Climate-Scale Changes in the Ocean Biosphere, and Reprocessing Is an Important Element in Developing Multi-Decadal Ocean Color Datasets
The importance of reprocessing mission data at regular intervals throughout the mission became apparent during both SeaWiFS and MODIS missions (McClain, 2009; Siegel and Franz, 2010). Much is learned during the mission about the sensor’s behavior and the atmospheric correction, bio-optical, and data high-quality mask/flag algorithms for converting Lw into ocean color products. Data reprocessing is needed to adjust for the following changes: (1) to the calibration coefficients due to sensor degradation, (2) to in-water and atmospheric correction algorithms based on validation results, and (3) in availability of new algorithms for new and improved data products. In addition, as discussed above, it takes many match-ups before the vicarious calibration can achieve the desired accuracy and stability for the sensor’s gain factor. Therefore, data processing and product generation cannot be expected to produce high-quality products at the beginning of a new mission.
For all these reasons, data product quality will improve as more is learned about the sensor’s behavior and as a result of reprocessing. For example, the initial processing of SeaWiFS imagery yielded negative values for water-leaving radiance for continental shelf waters in the band centered at 412 nm and depressed values at 443 nm. This difficult problem was not fully resolved until the data were reprocessed many times (e.g., Patt et al., 2003; McClain, 2009). In 2009, the reprocessing of the MODIS-Aqua dataset corrected another, much more subtle drift in the 412-nm water-leaving radiance, which had resulted in an apparent dramatic increase in CDOM concentration in the open ocean (Maritorena et al., 2010).
Reprocessing requires appropriate computational tools so that the entire dataset can be processed rapidly, enabling changes between algorithm or calibration selections to be quickly evaluated. This ability to rapidly reprocess the entire data stream was planned for the SeaWiFS mission. Fortunately, the price to performance ratio for commodity computer hardware has decreased dramatically since the launch of SeaWiFS, which makes it much easier to configure and run reprocessing experiments with multiple datasets.
Reprocessing of ocean color datasets also is critical for developing decadal-scale records across multiple missions. Antoine et al. (2005) developed a decadal-scale ocean color data record by linking the CZCS data record to the SeaWiFS era. Key to their approach was the reprocessing of both datasets using similar algorithms and sources. The resulting decadal ocean color time-series shows many interesting climate patterns supporting their approach (Martinez et al., 2009). Thus it is likely that the best approach to creating multi-decadal ocean color data products is the simultaneous reprocessing of multiple ocean color missions with similar algorithms and the same vicarious calibration sources, if possible (Siegel and Franz, 2010).
Conclusion: Reprocessing is important and needs to be incorporated into the mission plan and budget process from the beginning, with provisions for the computational ability to rapidly reprocess the entire dataset as it increases in size.
Conclusion: Reprocessing of multiple missions referenced to the same vicarious calibration sources is likely the only way to construct long-term ocean color data products.
9. The External U.S. and International Science Community Needs to Be Routinely Included in Evaluating Sensor Performance, Product Validation, and Other Updates to Ocean Color Data Products
One of the unique strengths of the SeaWiFS mission was how well it engaged the U.S. and international science community of ocean color data users, as well as those with technical knowledge and insight on satellite data processing and bio-optical measurements. Although all NASA science missions have science teams, the Ocean Biology and Biogeochemistry program is unique in hosting annual Ocean
Color Research Team meetings that are open to anyone. In this way, the SeaWiFS Project received input from a broad international group of scientists on algorithms, data quality, data products, validation, and other topics, from pre-launch throughout the mission. As a result, the project received important and unanticipated contributions that led to significant improvements. For example, the at-launch chlorophyll algorithm for SeaWiFS (OC-4) emerged from a community-led meeting that compared a wide suite of model formulations (O’Reilly et al., 1998). Another important advantage of open engagement is that the international user community develops a sense of ownership of the mission, which leads to considerable international cooperation. For example, members of the SeaWiFS project involved with algorithms and validation were invited as participants in the United Kingdom-supported Atlantic Meridional Transect cruises (Aiken et al., 2000), which provided a key source of in situ data across many bio-optical regimes.
Conclusion: Annual ocean color technical meetings among U.S. and international researchers and space agency personnel will create many opportunities for cooperative calibration and validation programs, improvements to algorithms, and coordination of ocean color mission data reprocessing.
10. Open and Efficient Access to Ocean Color Raw Data, Derived Data Products, and Documentation of All Aspects of the Mission is Required
The strong engagement of the research community would not have been possible without SeaWiFS’s exemplary open data policy and the ease with which data could be accessed. The implementation of an open access data policy with an efficient data distribution system built support for the mission. Such open data policies are the cornerstone for ensuring the robustness of the scientific method. In contrast, an open data policy with an inefficient data system can be problematic. An ocean color data system has to include a browse capability, as well as a way to distribute large amounts of data over the Internet (see Acker et al., 2002b). The ease of use of the SeaWiFS data system has made it the standard among ocean color missions. This was driven largely by researchers and engineers at the NASA SeaWiFS project. During the SeaWiFS and MODIS missions, many users wanted Level 3 imagery (i.e., maps of a particular product such as chlorophyll), whereas sophisticated users wanted Level 1 or Level 2 data to implement special algorithms and processing and to generate full-resolution, mapped imagery for a specific ocean region. Users generating long time-series of science or climate-quality imagery across multiple satellite data streams want access to Level 0 data, or if not Level 0 data, then a data level and ancillary information that allows “tweaking” of the calibration coefficients.
However, U.S. ITAR restrictions may hinder international exchange of raw satellite data and detailed calibration information. Such restrictions could seriously impede international cooperation, making it even more challenging to produce long time-series of ocean color products that are essential for determining if the ocean biology is changing in response to a changing climate.
ITAR restrictions may present the biggest problems when users attempt to exchange information about the sensor characteristics. Algorithms and reprocessing details are generally well documented for NASA ocean color satellite missions, including SeaWiFS and MODIS. The SeaWiFS project also documented many important technical and other aspects of the mission, producing 43 pre-launch and 29 post-launch technical reports on topics such as optics protocols, description of the bio-optical archive, results of inter-calibration exercises for in situ measurements, and orbit analysis. These documents are extremely valuable to users and to those planning future missions, including international partners. For the recent satellite ocean color reprocessing effort, these printed documents appear first as Web-based reports5 that show the effects of virtually every change on the final data products.
Conclusion: Efficient data systems, which are responsive to users’ needs and provide well-documented information on data algorithms and reprocessing, make important contributions to successful ocean color missions.
Based on lessons from CZCS, SeaWiFS, and MODIS, the committee concludes that requirements to successfully sustain ocean color radiance measurements from space go far beyond the specifications of a single sensor or mission. Delivering high-quality ocean color products demands long-range planning and long-term programs with stable funding that exceed the lifetime of any particular satellite mission.
Most of the important lessons from CZCS, SeaWiFS, MODIS, and MERIS relate to aspects of those missions that are not directly linked to the sensors’ design or specifications. However, much of the effort and budget to prepare the JPSS/NPP mission has been dedicated to sensor design, with relatively scant attention to long-range planning and other elements described in this chapter. Therefore, it is worth reiterating that launching a robust sensor into space meets only one of many requirements to successfully obtain ocean color radiance from space.
The SeaWiFS mission incorporated important lessons learned from the CZCS, such as the need for sensor stability monitoring, vicarious calibration, an in situ calibration/validation program, and a dedicated team for data processing, reprocessing, and distribution. As a result, SeaWiFS became
____________________________
a successful mission and is considered the “gold standard” for a Type 1 mission.
Although some coastal applications are not well served by SeaWiFS, the SeaWiFS sensor and the manner in which the mission was operated set an excellent standard by which to judge minimum sensor and mission operations requirements to generate data products for researchers, to assess climate impacts, and to deliver products for many operational users.
Minimum requirements for sensor design have to be assessed in the context of the specific application. A single set of requirements will not be able to deliver the broad spectrum of ocean color products necessary to meet the needs of the user community.
Because the sensor designs vary considerably, it is impractical for the committee to prescribe a particular design feature for future missions. Nevertheless, the design choices need to meet some key requirements, as listed in Table 3.2. It is important to weigh the trade-offs of each design element, because some choices will make other aspects of the mission more difficult.
Recommendation: To contribute to the success of a Type 1 mission, the sensor should meet some key design requirements. In particular, the sensor should:
• Minimize the impacts of scan geometry on the processing of ocean color imagery.
• Minimize sun glint by tilting the scan away from the sun-glint patterns.
• Measure atmospheric signal in both ocean color and aerosol bands without saturation yet provide sufficient precision in the ocean color bands.
• Have minimal but well-characterized polarization sensitivity.
• Have at least the SeaWiFS band-sets plus MODIS chlorophyll a fluorescence bands.
• Be well characterized and tested pre-launch.
In addition to the sensor requirements above, the committee suggests that minimum standards of design (Table 3.3) and characterization and calibration (Table 3.4) be followed for new satellite ocean color sensing systems, so that the best possible data are produced within the constraints of individual programs.
All new sensors are required to have high radiometric accuracy and stability. The committee recognizes that the costs associated with these standards, as represented by such instruments as MODIS and VIIRS, are very high. Although SeaWiFS standards could be relaxed for some operational users who only require pattern recognition, that would serve a comparatively small group among the total current research and operational users of satellite ocean color data (see Chapter 2). It also seems illogical to build and launch a satellite system that would achieve only these goals when a wider range of objectives could be fulfilled with some
TABLE 3.2 Sensor Requirements for Global 1 Km Ocean Color Remote Sensing to Sustain Both SeaWiFS and MODIS Measurements
| Geophysical Measure | Data Character | Sensor Parameter | Minimum Requirements | |
| Ocean Color Radiance | Spectral Coverage | Band-set | 360, 385, 412, 443, 490, 510, 555, 667, 678a nm | |
| Sensitivity | Signal-to-Noise Ratio (SNR) | SeaWiFS SNR in high gain mode | ||
| Spectral Purity | Out-of-band rejection Cross-talk | Better than for SeaWiFS | ||
| Radiometric Purity | Polarization sensitivity Stray light rejection |
< 1 percent | ||
| Response vs. scan angle (RVS) | Better than for SeaWiFS | |||
| Geometric Stability | ||||
| Aerosols | NIR Coverage | NIR band-set | 765 and 865 nm with appropriate SWIR bands | |
| Sensitivity | SNR | Similar to MODIS for the NIR bands but >MODIS for the SWIR | ||
| Clouds and Land | Dynamic Range | No saturation | Auto gain control | |
| Global Daily Ocean Coverage | Sun Glint Avoidance | Off-nadir pointing | Tilting from sun-glint pattern | |
| Stability | Calibrated | On-orbit reference | Solar diffuser and monthly lunar view Lab calibration | |
| Pre-launch characterization | ~0.1 percent stability compared with trend line | |||
NOTE: (‘>’ signifies “better than”).
a The 678-nm band is needed for chlorophyll fluorescence line height determination as done in MODIS and should be at an enhanced sensitivity compared with the other visible bands.
TABLE 3.3 Ocean Color Performance Design Guidelines That Affect Sensor Performance for Ocean Color and Other Applications
| Sensor Element | Performance Design Guideline | Sensor Example |
| Pointing/Scanning | Stray light rejection, high transmittance, low response vs. scan (RVS) angle variation | SeaWiFS forebaffle limits far-field stray light, half-angle mirror reduces RVS |
| Optics | High transmittance, flat field response, achromaticity | MODIS afocal telescope flat field high transmittance |
| Spectral Separation | Flat bands, sharp cutoffs, low out-of-band response, high transmittance | MODIS, SeaWiFS, VIIRS discrete interference filters |
| Detectors | Low noise, flat response over band, low inter-detector cross-talk, low detector-to-detector variation | SeaWiFS “single-detector” per band avoids non-uniformity |
| Electronics | Low noise, high frequency response, minimum channel-to-channel variation | SeaWiFS “single-channel” per band avoids channel-to-channel variation |
Examples of sensors from Tables 3.2 and 3.3 are indicated in the far right columns to illustrate applications of the principles.
TABLE 3.4 Ocean Color Pre-launch Characterization and Calibration (C&C) Design Guidelines That Affect Characterization, Calibration, and Sensor Stabilit Costs and Inherent Accuracies
| Sensor Element | C&C Design Guideline | Sensor Example |
| Pointing/Scanning | Response vs. scan (RVS) angle variation and polarization sensitivity | MODIS RVS cost driver with two-sided paddle-mirror |
| Optics | Spectral polarization sensitivity, transmittance, & modulation transfer function (MTF) vs. field angle | |
| Spectral Separation | Spectral acuity, flatness, out-of-band response, spatial uniformity | |
| Detectors | Cross-talk, linearity, MTF, SNR, detector-to-detector uniformity | SeaWiFS single-detector design limits non-uniformity |
| Electronics | Channel-to-channel variation, frequency response, linearity, noise |
Examples of sensors from Tables 3.2 and 3.3 are indicated in the far right columns to illustrate applications of the principles.
additional investment and effort. Sustaining SeaWiFS sensor and mission operation standards are the minimum criteria for satisfying the current research and operational applications for ocean waters beyond the shallow (< 20 m depth) waters near the coast. However, it needs to be stressed that many current research questions require that the sensor and mission meet more than just the minimum requirements. As discussed in Chapter 5, meeting only the minimum requirements will not be sufficient to explore the full potential of ocean color to generate novel products. Of course, without access to the novel products, one would not be in a position to undertake any research and development activity that required access to such products. The minimum requirements as stated are what are required to maintain the status quo in ocean color research and applications, and to sustain and further develop applications that require long, consistent time-series data. Meeting the minimum requirements would ensure that we do not lose ground so painstakingly gained, but would not ensure that we maintain preeminence in the field.
One area in which the committee concluded that requirements could be relaxed is pre-launch calibration accuracy requirements. Because a Type 1 ocean color sensor will undergo a vicarious calibration, meeting pre-launch standards becomes less crucial to the success of the mission as long as the other aspects of pre-launch characterization (spectral tests, polarization tests, etc.) and a successful on-orbit sensor stability-monitoring program are conducted. A pre-launch absolute calibration of only 3 to 5 percent (rather than approaching the 0.3 percent on orbit vicarious calibration requirement) would reduce costs for the launch characterization.
Recommendation: Based on the lessons described in this chapter, the committee has identified 13 essential requirements to successfully obtain ocean color data from a Type 1 remote sensing mission. Mission planning and funding should include and support the following requirements:
1. The sensor needs to be well characterized and calibrated prior to launch and needs to be equivalent to the combined best attributes from SeaWiFS and MODIS;
2. Post-launch vicarious calibration using a MOBY-
like approach is required to set the gain, to assess the through-system calibration, and to constrain the accuracy of the ocean color data products;
3. Stability monitoring is needed to assess and correct for ocean color sensor degradation (e.g., approximately monthly lunar look);
4. At least six months of sensor overlap is needed to transfer calibrations between sensors and to produce continuous climate data records;
5. Atmospheric correction and bio-optical models need to be updated as advances in science and observations become available;
6. Ocean color data products need to be validated over the range of global ocean conditions and feedback of data product validation to model improvement and on-orbit sensor characterization needs to occur. This validation plan needs to support in situ sampling of appropriate data for ocean color data product validation including the atmospheric correction bands and products;
7. Support research on algorithm and product development;
8. Ocean color data products need to be reprocessed periodically to incorporate changes to calibration owing to sensor degradation and algorithm improvements. Level 0 data need to be permanently archived to allow reprocessing;
9. The construction of long-term ocean color data records requires that satellite data from multiple missions be reprocessed using the same vicarious calibration sources and similar algorithms;
10. The U.S. and international science community should be routinely included in evaluating sensor performance, product validation, and supporting research on ocean color applications;
11. A system is needed that makes freely available all raw, meta-, and processed ocean color data products, algorithms, and processing codes that can distribute the data rapidly and efficiently;
12. Detailed and comprehensive documentation of all aspects of the mission needs to be accessible (instrument, algorithms, in situ protocols, etc.); and
13. Institutional memory needs to be maintained to ensure transfer of knowledge and expertise from previous mission science and engineering teams to subsequent U.S. groups and international partners.
It is important to reemphasize that these requirements represent the minimum necessary to continue ocean color remote sensing and to maintain current research and operational uses. To advance the science, missions need to go beyond the current capabilities. These next steps are discussed in Chapter 5. In addition, as we learned from past experience, every mission presents the community with new and unanticipated challenges that require hardware or software fixes or other approaches to circumvent the mission’s shortcomings.
Every satellite ocean color sensor launched so far has been unique, different from its predecessors and successors. Each mission’s objectives, of necessity, focused on optimizing the performance of the algorithms tailored specifically for that sensor. What all satellite sensors have in common, however, is a finite lifetime (SeaWiFS, with the longest service so far, provided valuable data for 13 years). And yet, when the goal of a study is to examine long-term trends and to isolate natural variability from climate change, the need is for climate-quality data records that extend over several decades: The longer the data record, the higher the value of the data stream, in the climate-change context. It is impossible to meet such goals with data from a single satellite; merged data from multiple satellites are critical to create the longest possible times-series of high-quality data. The goal then becomes continuity of data and products, rather than the success of any single mission. We know now that we cannot reach the goal of studying the marine ecosystems in the context of a changing climate except through international collaboration and merging of data from multiple satellites. As discussed in greater detail in Chapter 5, meeting the diverse needs of the expanding ocean color user community will require multiple sensors in both polar and geostationary orbit (Appendix D). An internationally shared effort to meet that requirement would yield benefits for all. Thus, an ideal planning approach moves beyond the mission-centric toward a data-centric approach


















