
Research Report on GNSS Interoperability
LU XIAOCHUN
National Time Service Center, Chinese Academy of Sciences
LU JUN
Beijing Institute of Tracking and Telecommunications Technology
BAI YAN, HAN TAO, and WANG XUE
National Time Service Center, Chinese Academy of Science
INTRODUCTION
Interoperability has become a focus of Global Navigation Satellite Systems (GNSS) and a development aspect, and incurs much focus among the world. For the purpose of maximum benefit, a series of interoperability researches and cooperation are put forward.
Research of interoperability includes both technical factors, such as signal design, satellite payload, and user terminal, and nontechnical factors, such as market and industry. One should consider not only combining with other systems, but also vindicating one’s own benefits and maintaining some independence.
Thus, research of interoperability should be approached with consideration of both technical factors and nontechnical factors.
INTEROPERABILITY DEFINITION PARSING
Elements of interoperability include coordinate reference frame, time reference frame, open signal, and the constellation. The resources probably applied in interoperability are global navigation satellite systems and their services, regional navigation satellite systems and their services, and augmentation systems and their services. Finally, the purpose of interoperability is to provide better services at the user level, including higher accuracy, better reliability, better cost-effectiveness, and more user satisfaction (different types of users, different application areas).
DISCUSSION OF INTEROPERABILITY PHASES BETWEEN BEIDOU GLOBAL SYSTEM AND GPS
Actuality of BeiDou and GPS
Coordinate Reference Frame
BeiDou uses CGS2000 as its coordinate reference frame and keeps a centimeter level bias with ITRF. GPS uses WGS84 as its coordinate reference frame and keeps a centimeter level bias with ITRF.
Time Reference Frame
The time reference frame of BeiDou is called “BDT”; the difference between BDT and UTC (NTSC) is less than 50 ns. The time reference frame of GPS is called “GPST”; the difference between GPST and UTC (USNO) is less than 28 ns.
Open Signals
The civil signal in the GPS L1 band is C/A code-BPSK(1); future civil signals in the L1 band are MBOC (TMBOC in pilot channel and BOC(1,1) in data channel).
The civil signal in the second phase of BeiDou is BPSK(2), and it provides service in the important area (30E~180E, 70S~70N); the civil signal in the third phase is MBOC (TMBOC in pilot channel and BOC(1,1) in data channel) (Tables 1 and 2).
TABLE 1 Signal in the Second and Third Phases of BeiDou
| Phase | Signal | Center frequency (MHz) | Code rate (MHz) |
Modulation | Services |
| BeiDou 2nd. | B1(I) | 1561.098 | 2.046 | BPSK | Open |
| BeiDou 3rd. | B1x/y | 1575.42 | 1.023 | TMBOC(6,1,4/33)+BOC(1,1) | Open |
TABLE 2 Signal of Current GPS and Future GPS
| Phase | Signal | Center frequency (MHz) | Code rate (MHz) |
Modulation | Services |
| Current GPS | LIC/A | 1575.42 | 2.046 | BPSK | Open |
| Future GPS | LIC | 1575.42 | 1.023 | TMBOC(6,1,4/33)+BOC(1,1) | Open |
Currently the BeiDou system has launched eight satellites of phase-2 and elementary form of positioning ability. Domestic industries have designed CMOS chip in L1 band (1561.098 MHz and 1575.42 MHz), and they plan to produce receivers able to receive GPS L1 C/A and BeiDou B1 BPSK(2), which make base of interoperability.
Constellation
GPS now has 30 satellites in orbit. The BeiDou regional system is designed to have 5 geostationary (GEO), 3 inclined geosynchronous orbit (IGSO) satellites, and 4 medium Earth orbit (MEO) satellites (Figure 1); while the BeiDou global system is designed to have 5 GEO, 3 IGSO, and 24 MEO satellites (Figure 2).
Suggestion of Interoperability Between BeiDou and GPS
According to current resources, interoperability between BeiDou B1 and GPS L1 should be staged in three phases (Figure 3):
Phase 1: From 2012 until GPS TMBOC operates.
Phase 2: From GPS TMBOC operation to BeiDou TMBOC functions (2020).
Phase 3: After BeiDou TMBOC operates (2020).
Phase 1
Interoperability between GPS L1 BPSK(1) in 1575.42 MHz and BeiDou regional system B1 BPSK(2) in 1561.098 MHz (Figure 4).
Phase 2
Interoperability between GPS L1 TMBOC in 1575.42 MHz and BeiDou regional system B1 BPSK(2) in 1561.098 MHz (Figure 5).
Phase 3
Interoperability between GPS L1-TMBOC in 1575.42 MHz and BeiDou global system B1-TMBOC in 1575.42 MHz (Figure 6).
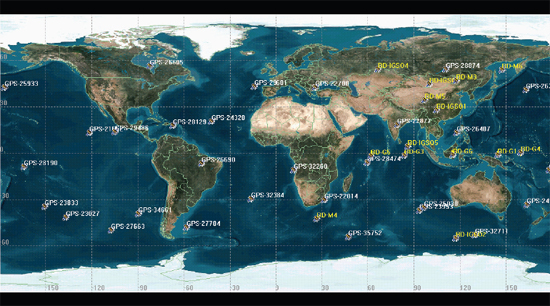
FIGURE 1 Constellation of GPS and BeiDou regional system.

FIGURE 2 Constellation of GPS and BeiDou global system.
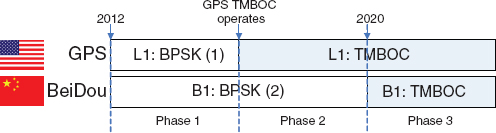
FIGURE 3 Phases of interoperability between BeiDou and GPS.
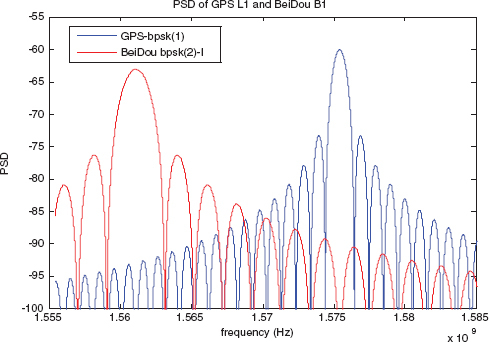
FIGURE 4 Frequency spectrum in interoperability phase 1.
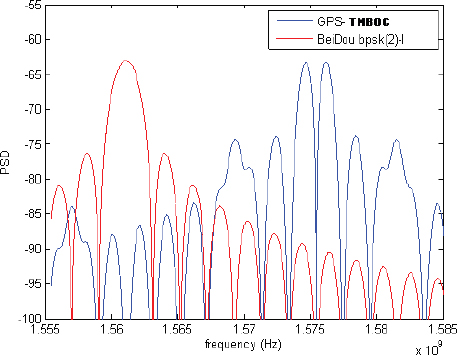
FIGURE 5 Frequency spectrum in interoperability phase 2.
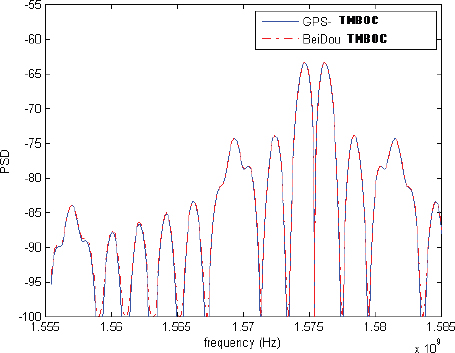
FIGURE 6 Frequency spectrum in interoperability phase 3.
FEASIBILITY ANALYSIS OF INTEROPERABILITY BETWEEN BEIDOU B1 BPSK(2) AND GPS BPSK(1)
Signal Performance Analysis
Correlation peak
Correlation peak can be calculated as:
where SBB-Pr ePr oc is the base band signal (after pretreatment); reference signal SRe f is the copy of ideally base band signal from receiver; integral time Tp corresponds to the main period of reference signal. The correlation peak is correlated to ranging accuracy, anti-multipath, and anti-jamming of a signal. The sharper the peak is, the better performance a signal has. From Figure 7, BPSK(2) has a sharper correlation peak than BPSK(1).
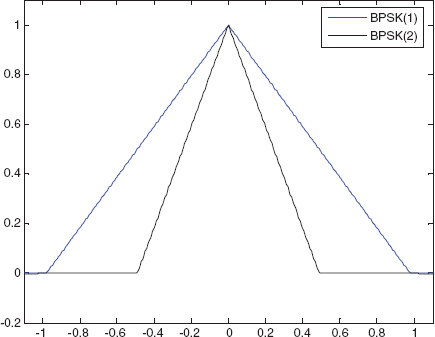
FIGURE 7 Correlation peak of BPSK(1) and BPSK(2).
Gabor Bandwidth
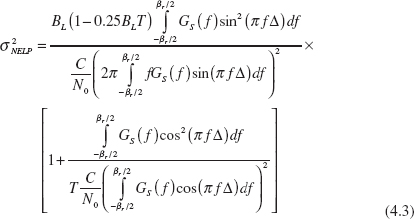
Gabor bandwidth is the best index to estimate the connection from receive-bandwidth to tracking accuracy; the greater the Gabor bandwidth is, the better the signal’s tracking accuracy. Under the same code loop bandwidth and same receive carrier to noise ratio, the root mean square (RMS) code tracking accuracy depends on RMS bandwidth.
![]()
where βrms is RMS bandwidth (namely Gabor bandwidth), βr is bilateral receive bandwidth, and GS(f) is PSD.
The RMS bandwidth of different modulations is shown in Table 3. The anti-jamming of BPSK(2) is better than BPSK(1), but weaker than MBOC.
TABLE 3 Gabor Bandwidth
| Modulation | BPSK(1) | BPSK(2) | CBOC+ | CBOC- | TMBoc | BOCsin (2.2) |
| Gabor bandwidth | 1.4415x105 | 2.0525x105 | 3.0990xl05 | 3.53485 | 3.552xl05 | 3.5558xl05 |
Tracking Error
Suppose the interference signal power spectrum is white, one-side power spectrum is N0, signal-receive power is Pc, and forward bandwidth is βr. The bilateral power spectrum of interference signal baseband equivalent w(t) is twice the unilateral power spectrum of radio interference; power (Ps) of available signal envelope s(t) is twice of radio signal, influence from the channel is equal to baseband transmit function H(f), GS(f) is signal power spectrum, T is integral time, and Δ is correlator pace (unit: second) (Table 4).
TABLE 4 Simulation Parameters
| Delt = 5 | IntTime = 0.004 s | Dllw = 0.5Hz | d = 1/(12*1.023*10^6) |
| Space of power spectrum frequency | Integral time | Loop bandwidth | Correlator space |
Figure 8 shows that BPSK(2) has better tracking error than BPSK(1).
Multipath
Receive signal with multipath can be equated to:
![]()
where a0 is the extent of firsthand signal; ϕ0 is the phase of firsthand signal; x(t) is the complex envelope of sending signal; τ0 is the time delay of firsthand signal; N is the number of path of the multipath signal; an is the extent of multipath signal; ϕn is the phase of the multipath signal; and τn is the time delay of the multipath signal.
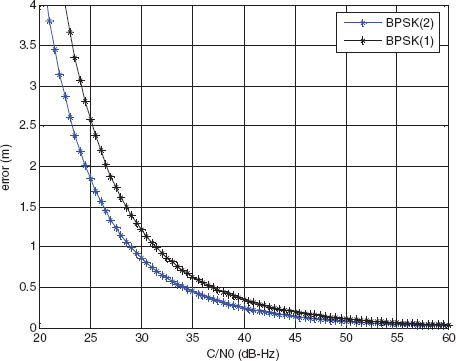
FIGURE 8 Tracking error of BPSK(1) and BPSK(2).
Multipath error can be depicted as:
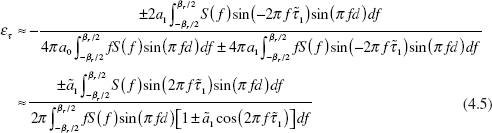
where ã1 = a1/a0 is the extent ratio from the multipath signal to the firsthand signal, βr is the front bandwidth of receiver, and d is the correlator space.
The mean multipath error A(τ) can be calculated by:
![]()
where E(x) is the curve function of multipath error envelope, and τ is code time delay. Then the even multipath error is:
![]()
where ε(τ) is the function of multipath error envelope, εa(τ1) is the function of even multipath error, τ1 and τ are multipath signal time delay (Table 5, Figures 9 and 10).
TABLE 5 Simulation Parameters
| a1 = -5 dB | B = 30 MHz | d = 1/20 code |
| Extent ratio from multipath signal to firsthand signal | Front receive bandwidth | Correlator space |
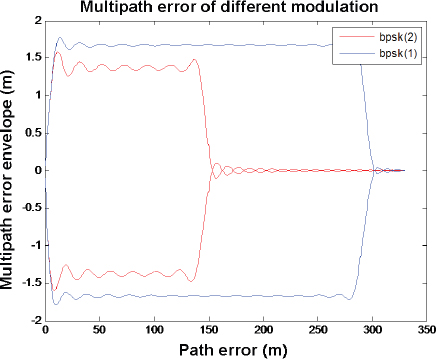
FIGURE 9 Multipath error of BPSK(1) and BPSK(2).
FIGURE 10 Mean multipath error of BPSK(1) and BPSK(2).
Code Cross-correlation
Code cross-correlation can validate the cross-correlation between BeiDou ranging code and GPS L1 C/A code. Simulate the maximum value after uniformed correlation between 32 GPS codes to 32 GPS codes, 13 BeiDou codes to 13 BeiDou codes, and 32 GPS codes to 13 BeiDou codes, as shown in Figures 11–13. The colors in these figures represent the maximum correlation values.
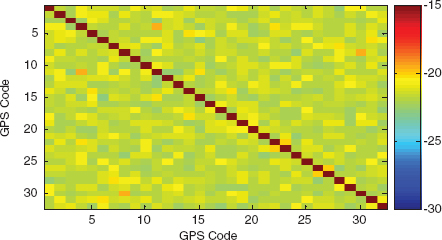
FIGURE 11 Cross-correlation of GPS ranging code.
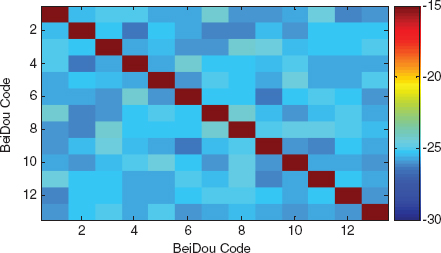
FIGURE 12 Cross-correlation of BeiDou ranging code.
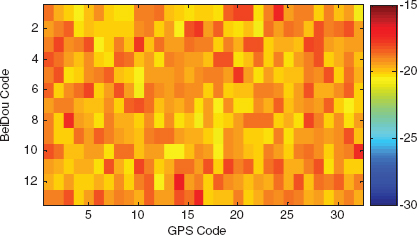
FIGURE 13 Cross-correlation of GPS ranging code and BeiDou ranging code.
Brief Summary
BeiDou B1 BPSK(2) has a better tracking performance, better anti-jamming performance, and better anti-multipath performance than GPS L1 BPSK(1). Interoperability of the two signals makes a higher receiver ranging accuracy.
Interoperability at different frequencies enhances the anti-jamming and signal reliability.
Service Performance
Accuracy
Service accuracy is employed to depict the difference between the real value and measurement value of positioning, timing, and velocity measure. Space signal accuracy includes user range error (URE), user range ratio error (URRE), user range acceleration error (URAE), and user timing error.
The positioning error depends on pseudo range measurement noise, satellite location error, and positioning dilution of precision (PDOP).
![]()
where PDOP is a nonrandom factor determined by the location of the user and satellites; σ is related to URE and is a random factor.
Service accuracy is the difference between the users’ real position, velocity, and timing value and their measurements. Accuracy = UERE × PDOP, where
UERE is made up of URE and UEE (UERE = ![]() ); UERE is related with satellite clock error, ephemeris error, atmosphere model error, multipath error, and receiver clock error. In a given system, with the same URE and same UEE, the positioning accuracy is determined by PDOP.
); UERE is related with satellite clock error, ephemeris error, atmosphere model error, multipath error, and receiver clock error. In a given system, with the same URE and same UEE, the positioning accuracy is determined by PDOP.
Availability
Service availability is the time ratio of congruous threshold value of positioning, timing, and velocity measurement in a prescriptive time period (usually a recursive period) and a given region.
Suppose the threshold of positioning accuracy and timing accuracy are σp, σt. The URE is related to positioning accuracy:
![]()
Timing accuracy is (GPS SPS 2008):
![]()
Thus, the threshold of positioning accuracy and timing accuracy in a given system is:

For the same threshold of positioning accuracy and timing accuracy, decreases of PDOP and TDOP will help to add to the threshold. Because the range of URE will be enlarged, which leads to the enhancement of GNSS availability, this extension is related with the distribution of URE.
Chinese Area
Calculate the PDOP and TDOP, shown as Tables 6 and 7.
Calculate PDOP and TDOP of interoperability constellation, GPS constellation, and BeiDou constellation in seven days (a return period) point by point both in the region of China. Then compare their average to sole system, as follows (Figures 14–17).
TABLE 6 PDOP Value of GPS+BeiDou Regional System
| Place | GPS | BeiDou | GPS+BeiDou | Place | GPS | BeiDou | GPS+BeiDou | |
| Mean | Lintong | 1.697 | 2.360 | 1.224 | Beijing | 1.666 | 2.422 | 1.193 |
| Max | 2.605 | 3.162 | 1.689 | 2.662 | 3.250 | 1.683 | ||
| Min | 1.297 | 1.537 | 0.973 | 1.205 | 1.551 | 0.944 | ||
| Mean | Kashi | 1.786 | 5.036 | 1.376 | Sanya | 1.633 | 2.153 | 1.142 |
| Max | 5.660 | 12.61 | 2.055 | 2.555 | 2.809 | 1.602 | ||
| Min | 1.243 | 1.943 | 1.045 | 1.108 | 1.460 | 0.833 | ||
| Mean | Mohe | 1.619 | 3.528 | 1.189 | Tokyo | 1.646 | 3.445 | 1.245 |
| Max | 2.493 | 5.522 | 1.524 | 2.455 | 5.315 | 1.746 | ||
| Min | 1.202 | 1.873 | 0.919 | 1.251 | 1.733 | 1.014 | ||
| Mean | Singapore | 1.522 | 2.107 | 1.085 | ||||
| Max | 2.018 | 2.748 | 1.295 | |||||
| Min | 1.253 | 1.447 | 0.905 |
TABLE 7 TDOP Value of GPS+BeiDou Regional System
| Place | GPS | BeiDou | GPS+BeiDou | Place | GPS | BeiDou | GPS+BeiDou | |
| Mean | Lintong | 0.884 | 1.433 | 0.661 | Beijing | 0.865 | 1.481 | 0.630 |
| Max | 1.643 | 1.965 | 1.084 | 1.635 | 2.049 | 1.057 | ||
| Min | 0.518 | 0.788 | 0.451 | 0.494 | 0.717 | 0.449 | ||
| Mean | Kashi | 0.918 | 3.465 | 0.721 | Sanya | 0.824 | 1.353 | 0.622 |
| Max | 3.714 | 8.690 | 1.361 | 1.446 | 1.855 | 0.969 | ||
| Min | 0.526 | 0.875 | 0.481 | 0.465 | 0.790 | 0.409 | ||
| Mean | Mohe | 0.806 | 2.458 | 0.589 | Tokyo | 0.847 | 2.435 | 0.676 |
| Max | 1.574 | 4.369 | 0.824 | 1.479 | 4.123 | 1.052 | ||
| Min | 0.506 | 0.834 | 0.409 | 0.577 | 0.887 | 0.493 | ||
| Mean | Singapore | 0.721 | 1.318 | 0.579 | ||||
| Max | 1.064 | 1.786 | 0.767 | |||||
| Min | 0.534 | 0.813 | 0.460 |
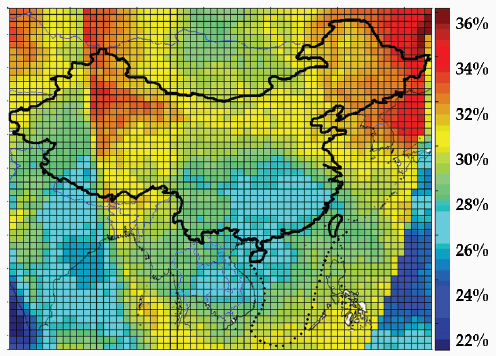
FIGURE 14 Average PDOP reducing in China (compare with GPS).
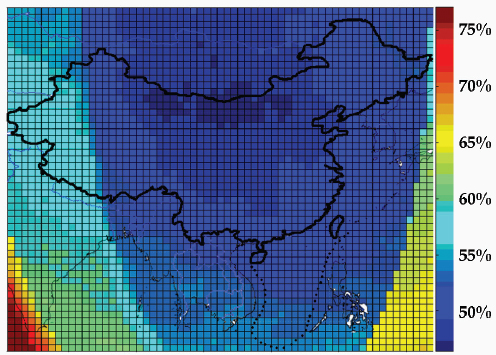
FIGURE 15 Average PDOP reducing in China (compare with BeiDou).
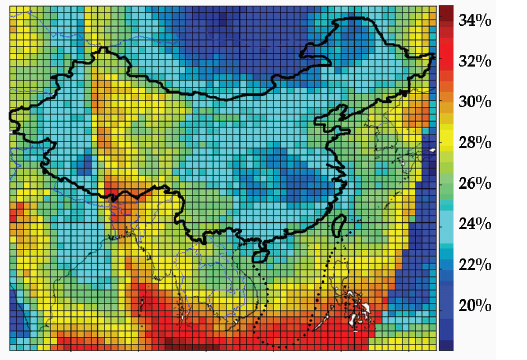
FIGURE 16 Average TDOP reducing in China (compare with GPS).
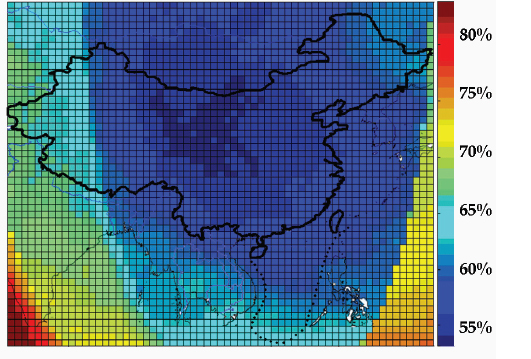
FIGURE 17 Average TDOP reducing in China (compare with BeiDou).
In China, the average PDOP reducing from interoperability constellation to GPS is 29.01 percent; the average TDOP reducing is 25.77 percent; the average PDOP reducing from interoperability constellation to BeiDou is 53.33 percent; and the average TDOP reducing is 61.23 percent. Thus, compared with BeiDou, the interoperability system obtains a 53.33 percent improvement in positioning accuracy and positioning availability, a 61.23 percent improvement in timing accuracy and timing availability; compared to GPS, the interoperability system obtains a 29.01 percent improvement in positioning accuracy and positioning availability and a 25.77 percent improvement in timing accuracy and timing availability.
U.S. Area
Calculate the PDOP and TDOP, shown as Tables 8 and 9.
Calculate PDOP, TDOP of interoperability constellation, GPS constellation, and BeiDou constellation in seven days (a return period) point by point both in the region of United States. Then compare their average to sole system, as shown in Figures 18 and 19.
TABLE 8 PDOP Value of GPS and BeiDou Regional System
| Place | GPS | GPS+BeiDou | Place | GPS | GPS+BeiDou | |
| Mean | Hawaii | 1.645 | 1.391 | Los Angeles | 1.650 | 1.536 |
| Max | 2.742 | 2.185 | 2.265 | 2.265 | ||
| Min | 1.16 | 1.051 | 1.252 | 1.117 | ||
| Mean | New York | 1.623 | 1.501 | |||
| Max | 2.639 | 2.069 | ||||
| Min | 1.215 | 1.177 |
TABLE 9 TDOP Value of GPS and BeiDou Regional System
| Place | GPS | GPS+BeiDou | Place | GPS | GPS+BeiDou | |
| Mean | Hawaii | 0.835 | 0.690 | Los Angeles | 0.838 | 0.773 |
| Max | 1.666 | 1.171 | 1.365 | 1.361 | ||
| Min | 0.484 | 0.457 | 0.558 | 0.526 | ||
| Mean | New York | 0.830 | 0.762 | |||
| Max | 1.631 | 1.240 | ||||
| Min | 0.542 | 0.515 |
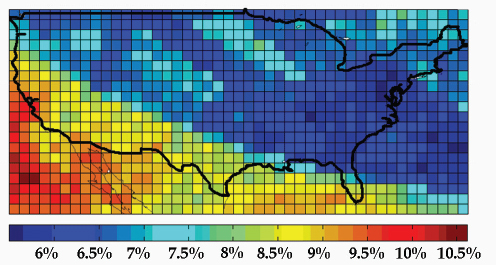
FIGURE 18 Average PDOP reducing in the United States (compare with GPS).
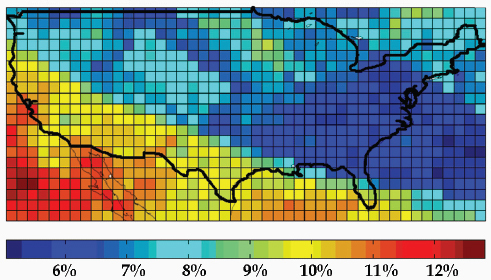
FIGURE 19 Average TDOP reducing in the United States (compare with GPS).
In the United States, the average PDOP reducing from interoperability constellation to GPS is 7.26 percent, and the average TDOP reducing is 8.04 percent. Thus, compared with GPS, the interoperability system obtains a 7.26 percent improvement in positioning accuracy and positioning availability and an 8.04 percent improvement in timing accuracy and timing availability.
Integrity
Service integrity is the probability that the system gives an alarm when there is any malfunction or any error excess threshold value. Service integrity denotes as alarming threshold, alarming period, and hazard misleading information (HMI) probability. Alarming period is the maximum time delay between malfunction beginning and alarm. HMI probability is the probability when the current measure values do exceed the thresholds.
System thresholds of positioning and timing are:
For the same positioning and timing threshold, decreasing of PDOP and TDOP increases the threshold of URE and Δt. Denote the positioning and timing threshold before interoperability as ε1, μ1; which after interoperability are ε2, μ2. Because the positioning and timing accuracy are definite, their variance σ1, σ2 will be unchangeable. Then:
![]()
![]()
where p(x,y) is probability density function, for the same p(x,y):
![]()
Thus, the HMI probability before interoperability is smaller than after.
Continuity
Continuity is the ability of avoidance of non-arranged interrupt during the regular operation of a satellite navigation system. Continuity is made up of space signal continuity and positioning service continuity. Space signal continuity is the time ratio of the period of “healthy” signal to a given time interval, which means there is no probability of non-arranged interrupt in a given time interval. Positioning service continuity is the time ratio that the service satisfies the users’ positioning accuracy requirement in a given time interval and a given service area. Space signal mean continuity will be calculated by the mean time between failures (MTBF) and mean time to restoration (MTTR) in a non-arranged situation:
![]()
where N is the satellite number.
Suppose there are n satellites, when add the kth one, the positioning service continuity will change.
For n+1 satellites, if any satellite is interrupted, the continuity of n+1 satellites is equal to the continuity of n normally working satellites. If no satellite is interrupted, it is the continuity of n+1 normally working satellites.
So, the continuity of n+1 satellites is better than that of n satellites; the continuity of n+2 satellites is better than that of n+1 satellites. Thus, an increased satellite number will enhance positioning continuity.
Brief Summary
Interoperability will promote positioning and timing accuracy; positioning and timing availability; and service integrity and service continuity. Service performance improvement in Chinese region is larger than that in the U.S. region.
Receiver Cost-effectiveness
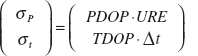
The structure of a receiver is shown as Figure 20.
Antenna
The frequency difference between B1 and L1 is 14.322 MHz; it is indistinguishable while using omnidirectional antenna both before and after interoperability.
Radio Channel
Some domestic chip factories have already produced the compatible chip of GPS L1 and BeiDou B1. The radio channel, which used to be a troublesome factor, has been greatly solved. According to the market investigation, the civil receiver chip and ADC chip are only 0.7 USD with power consumed 10~30 mW.
FIGURE 20 Receiver structure.
Capture, Tracking, Demodulation, PVT Measure, and Positioning
The channel of capture, tracking, demodulation, PVT measure, and positioning in the receiver will be added because of the increased numbers of visible satellites; while the cost of each channel is no more than 1 percent of the navigation chip.
FEASIBILITY ANALYSIS OF INTEROPERABILITY BETWEEN BEIDOU B1 BPSK(2) AND GPS TMBOC
Signal Performances Analysis
Correlation Peak
Figure 21 shows the correlation peak curve of BPSK(1), BPSK(2), and TMBOC; where TMBOC has the most sharp correlation peak.
MBOC has a better anti-jamming performance than BPSK(2) and BPSK(1).
Tracking Error
Figure 22 shows that MBOC has a bigger tracking error than BPSK(2) and smaller than BPSK(1). The simulation parameters are listed in Table 4.
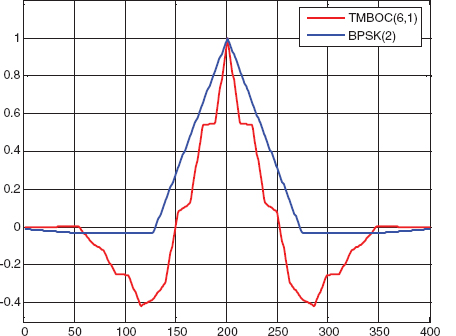
FIGURE 21 Correlation peak of BPSK(1), BPSK(2), and MBOC(6,1,1/1).
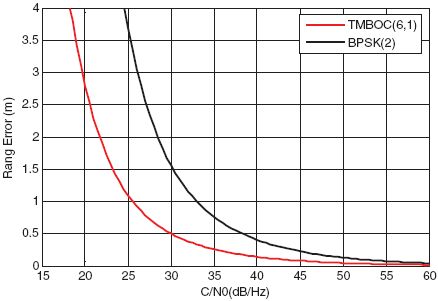
FIGURE 22 Tracking error of BPSK(1), BPSK(2), and MBOC(6,1,1/1).
Multipath
Table 10 and Figures 23 and 24.
Brief Summary
GPS MBOC has better ranging accuracy, anti-jamming, and anti-multipath than BeiDou B1 BPSK(2), but the difference is not large. Interoperability at different frequency improves the anti-jamming and availability of system.
Service Performance
Availability
In China, compared with BeiDou, the interoperability system obtains a 53.33 percent improvement in positioning availability and a 61.23 percent improvement in timing availability; compared with GPS, the interoperability
TABLE 10 Simulation Parameters
| B = 30 MHz | a1 = -5 db | d = 1/20 |
| Front receive bandwidth | Ratio of multipath to direct signal | Correlator space |
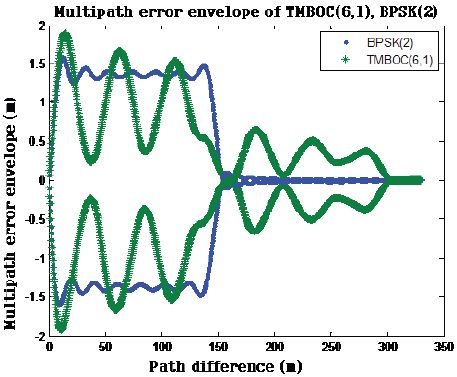
FIGURE 23 Multipath error envelope of BPSK(2) and MBOC(6,1,1/1).
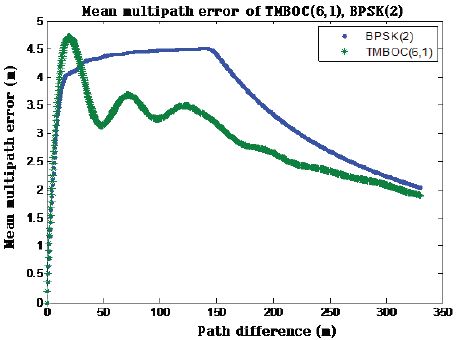
FIGURE 24 Multipath error of BPSK(2) and MBOC(6,1,1/1).
system obtains a 29.01 percent improvement in positioning availability and a 25.77 percent improvement in timing availability.
In the United States, compared with GPS, the interoperability system obtains a 7.26 percent improvement in positioning availability and an 8.04 percent improvement in timing availability.
Integrity
The ranging accuracy of signal in phase two of interoperability is better than in phase one; the integrity detect ability will keep the same level of phase one.
Continuity
Continuity in phase two of interoperability is almost the same as in phase one.
Brief Summary
Comparing the service performance in the second phase of interoperability to that in the first phase, there are improved positioning and timing accuracy, improved positioning and timing availability, enhanced service integrity, and advanced service continuity.
FEASIBILITY ANALYSIS OF INTEROPERABILITY BETWEEN BEIDOU TMBOC AND GPS TMBOC
Signal Performance Analysis
Correlation Peak
The correlation peak curve has a direct relation with ranging accuracy, anti-multipath, and anti-jamming performance. The sharper the peak, the better the performance. Figure 25 shows the correlation peak curves of BPSK(1), BOC(1,1), TMBOC, and CBOC.
Gabor Bandwidth
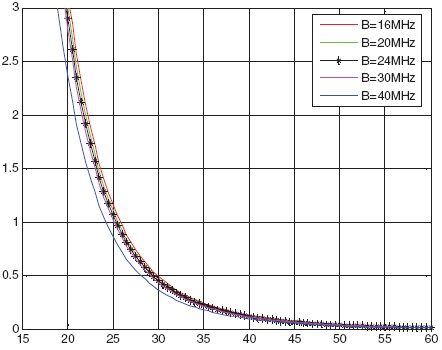
Figure 26 shows the power spectrum envelopes of TMBOC and CBOC. The RMS bandwidths of different modulations are shown in Table 11.
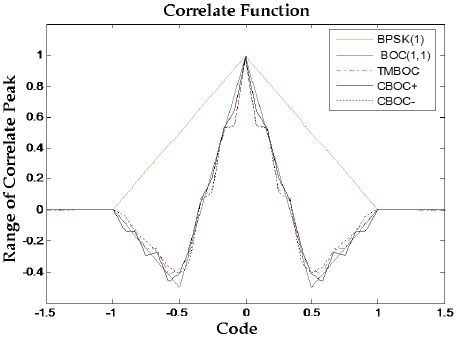
FIGURE 25 Correlation peaks of BPSK(1), BOC(1,1), TMBOC, and CBOC.
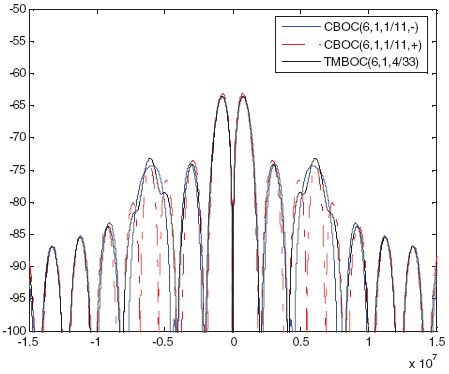
FIGURE 26 Power spectrum envelopes of TMBOC and CBOC.
TABLE 11 Gabor Bandwidth
| Modulation | Gabor bandwidth | Modulation | Gabor bandwidth |
| BPSK(1) | 1.4416 × 106 | CBOC+(6,1,1/11) | 3.0990 × 106 |
| BOCsin(1,1) | 2.5194 × 106 | CBOC-(6,1,1/11) | 3.5348 × 106 |
| BOCcos(1,1) | 3.2561 × 106 | TMBoc(6,1,1/11) | 3.5520 × 106 |
Tracking Error
Error curves of TMBOC with different correlator spaces are shown in Figure 27 (Table 12).
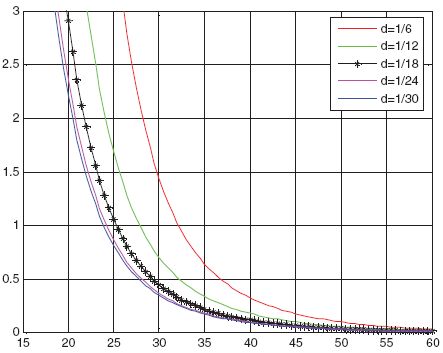
FIGURE 27 TMBOC error curves with different correlator spaces.
TABLE 12 Simulation Parameters
| Delt = 5 | B = 0.2 | IntTime = 0.004 | |||
| Frequency space of power spectrum | Loop bandwidth | Integral time | |||
Error curves of TMBOC with different receiver loop bandwidths are shown in Figure 29 (Table 14).
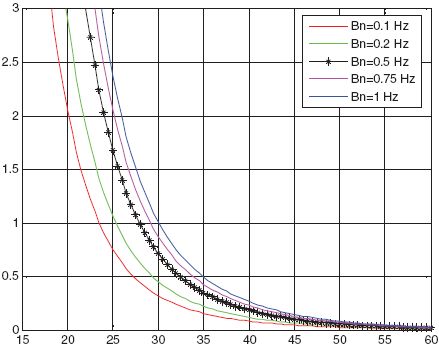
FIGURE 29 TMBOC error curves with different receiver loop bandwidths.
TABLE 14 Simulation Parameters
| Delt = 5 | IntTime = 0.004 | Dllw = [0.1 0.2 0.5 0.75 1] | d = 1/24 |
| Frequency space of power spectrum | Integral time | Loop bandwidth | Correlator space |
Error curves of TMBOC with different integral time are shown in Figure 30 (Table 15).
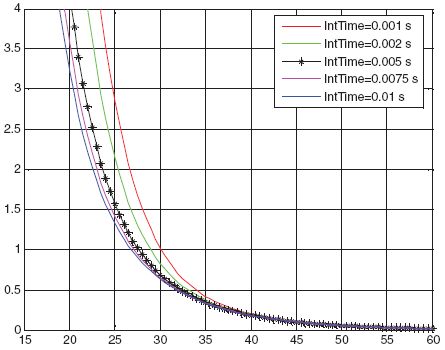
FIGURE 30 TMBOC error curves with different integral time.
TABLE 15 Simulation Parameters
| Delt = 5 | Dllw = 0.5 | Dllw = [0.1 0.2 0.5 0.75 1] | d = 1/24 |
| Frequency space of power spectrum | Loop bandwidth | Loop bandwidth | Correlator space |
Error curves of signals with different modulations are shown as Figure 31 (Table 16).
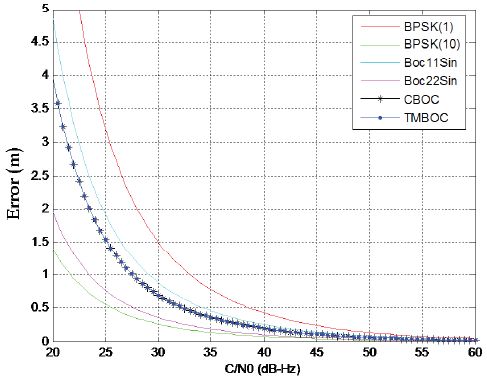
FIGURE 31 Error curves of signals with different modulations.
TABLE 16 Simulation Parameters
| Delt = 5 | Dllw = 0.5 | IntTime = 0.004 s | d = 1/24 |
| Frequency space of power spectrum | Loop bandwidth | Integral time | Correlator space |
Multipath
Generally, we can get different multipath performance for each kind of navigation signal based on its multipath error and multipath running average error.
Assume that receiver front bandwidth is 30 MHz, with correlator space of 1/20 chip and the ratio of multipath to direct path of -6dB. Figure 32 shows the envelop curves of multipath average errors for BPSK(10), BOC(1,1), BOC(2,2), TMBOC Pilot, and CBOC Pilot.
If we put the modulated signal with best performance in the first place, and that with worst performance in the end, then we can easily get the following results: BPSK(10), BOC(2,2), TMBOC(6,1,4/33), CBOC-(6,1,1/11), BOC(1,1), BPSK(1); where the difference between TMBOC(6,1,4/33) and CBOC-(6,1,1/11) is very small.
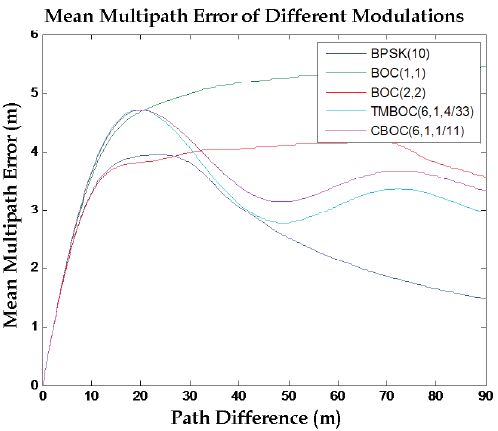
FIGURE 32 Multipath running average error.
Brief Summary
Both BeiDou B1 signal in phase 3 and GPS modernized signals adopt the design of TMBOC(6,1,4/33) + BOC(1,1). The particular technologies of time division in sub-carrier wave, second coding for ranging codes, channel separation, and message coding make the TMBOC signal have a better acquisition performance, better tracking performance, better demodulation performance, better anti-jamming performance, and better anti-multipath performance.
Service Performance
In phase 3 of interoperability between BeiDou and GPS, not only did the signals of BeiDou system change, but its satellite constellation also changed (Figures 33–38).
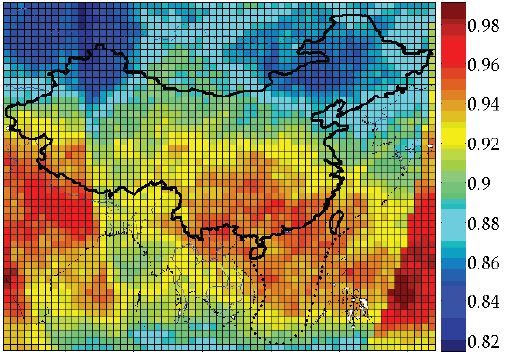
FIGURE 33 PDOP in China.
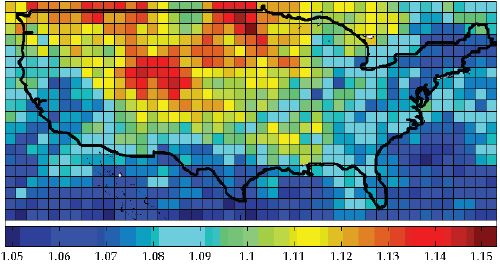
FIGURE 34 PDOP in the United States.
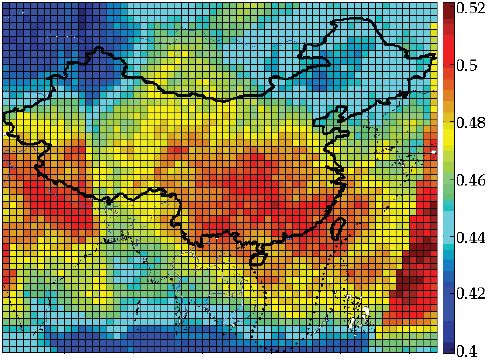
FIGURE 35 TDOP in China.
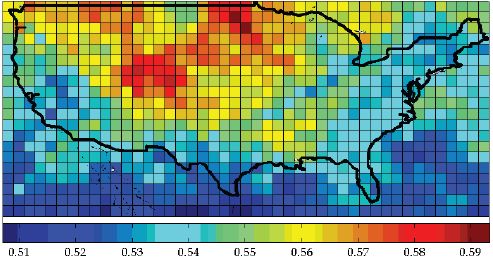
FIGURE 36 TDOP in the United States.
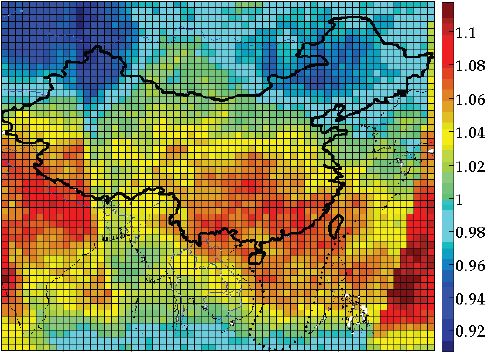
FIGURE 37 GDOP in China.
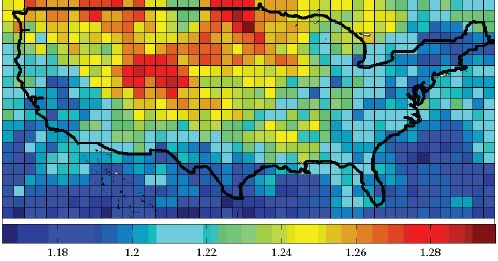
FIGURE 38 GDOP in the United States.
Accuracy
In China, for an interoperability constellation of BeiDou + GPS, the average PDOP reduction is 30.14 percent compared with that of GPS, while the average TDOP reduction is 28.76 percent. When it is compared with BeiDou, the average PDOP reduction is 17.75 percent, and the average TDOP reduction is 20.14 percent. Thus, compared with GPS, the interoperability system obtains a 30.14 percent improvement in positioning accuracy and a 28.76 percent improvement in timing accuracy. When it is compared with BeiDou, the interoperability system obtains a 17.75 percent improvement in positioning accuracy and a 20.14 percent improvement in timing accuracy.
In the United States, for an interoperability constellation of BeiDou + GPS, the average PDOP reduction is 35.10 percent compared with that of GPS and the average TDOP reduction is 36.66 percent. When it is compared with BeiDou, the average PDOP reduction is 35.86 percent and the average TDOP reduction is 37.97 percent. Thus, compared with GPS, the interoperability system obtains a 35.10 percent improvement in positioning accuracy and a 36.66 percent improvement in timing accuracy. When it is compared with BeiDou, the interoperability system obtains a 35.86 percent improvement in positioning accuracy and a 37.97 percent improvement in timing accuracy.
Availability
In China, for an interoperability constellation of BeiDou + GPS, the average PDOP reduction is 30.14 percent compared with that of GPS and the average TDOP reduction is 28.76 percent. When it is compared with BeiDou,
the average PDOP reduction is 17.75 percent and the average TDOP reduction is 20.14 percent. Thus, compared with GPS, the interoperability system obtains a 30.14 percent improvement in positioning availability and a 28.76 percent improvement in timing availability. When it is compared with BeiDou, the interoperability system obtains a 17.75 percent improvement in positioning availability and a 20.14 percent improvement in timing availability.
In the United States, for an interoperability constellation of BeiDou and GPS, the average PDOP reduction is 35.10 percent and the average TDOP reduction is 36.66 percent. When it is compared with BeiDou, the average PDOP reduction is 35.86 percent and the average TDOP reduction is 37.97 percent. Thus, compared with GPS, the interoperability system obtains a 35.10 percent improvement in positioning availability and 36.66 percent improvement in timing availability. When it is compared with BeiDou, the interoperability system obtains a 35.86 percent improvement in positioning availability and a 37.97 percent improvement in timing availability.
Integrity
The ranging accuracy of interoperable signal in phase 3 is better than that of phase 2; while the GDOP in phase 3 is better than that of phase 2. Thus, the integrity detection ability will be improved.
Continuity
Increase of the number of BeiDou satellites also adds the number of interoperability constellation satellites in phase 3, which will lead to a better continuity than that of phase 2.
Brief Summary
In phase 3, there will be a smaller ranging error, advanced URE, more visible satellites, and lower positioning and timing threshold. As a result, service availability, integrity, and continuity will be improved. So we can draw the conclusion that, if BeiDou and GPS could achieve interoperability, then there will be a great improvement in the service performance of both systems.
SUMMARY
From the analysis above, we can see that:
- BeiDou and GPS could achieve interoperability.
- Interoperability between BeiDou and GPS will be of great benefit to the improvement in service performance.
- With the development of each system, interoperability between the two systems will deepen.
- Interoperability could be achieved between BeiDou B2 signal and GPS L5 signal as well, so dual-frequency interoperability can also be realized.








































