
COMPASS/BeiDou Coordinate and Time Reference Systems
YANG YUANXI and TANG JING
China National Administration of GNSS and Applications (CNAGA)
HAN CHUNHAO
Beijing Global Information Center of Application and Exploration
ABSTRACT
Satellite navigation needs coordinate and time references. It is impossible to realize interoperability for multiple GNSS systems without a consistent reference coordinate system and time system. Compass/BeiDou satellite navigation system follows the rules of compatibility and interoperability defined by the International Committee of GNSS (ICG). The coordinate system of BeiDou is aligned to the China Geodetic Coordinate System 2000 (CGCS 2000), which is aligned to ITRS. BeiDou system time (BDT) is an internal, continuous navigation time scale, without leap second. BDT is linked to the national UTC(k), which is consistent to UTC. The status and existing problems and future developments are described.
BEIDOU COORDINATE SYSTEM (BDC)
GNSS provides position and time service, while it needs reference coordinate and time. Multi-GNSS will do nothing without the same datum of coordinate and time system. In theory, all of the GNSS coordinate reference system should be referred to the same geocentric reference coordinate system, which is beneficial to the satellite navigation providers, the companies/producers of the GNSS receivers, and the users. However, the same reference coordinate system does not mean the same reference frame, which is unnecessary and impossible for system providers at the present stage for several reasons. First, different nations or different continents may realize their own reference coordinate system by using different coordinate frames. Second, different coordinate frames have different uncertainty and different
systematic errors. Third, the offsets between different coordinate frames may be detected by some common stations with different satellite positioning coordinates. Fourth, the satellite orbit parameters may reflect the reference coordinate, which can be monitored by multi-GNSS receivers. Fifth, the reference coordinate system should include the dynamic deformation information, and the update of the reference frame should have standards, otherwise additional satellite orbit errors may be introduced in the satellite navigation systems.
Foundation of BDC
BDC is consistent with CGCS 2000, which in turn is consistent with the International Terrestrial Reference System (ITRS), and is a global, three-dimensional, right-handed, orthogonal, geocentric reference system. CGCS is realized by China Terrestrial Reference Frame 2000 (CTRF2000), which is referred to ITRF97 with the epoch of 2000.0 (Yang, 2009). The main parameters of the reference ellipsoid are nearly the same as those defined by ITRS with the semi major axis (a), second degree harmonic coefficient (J2), and the mean angular velocity of the Earth (ω) the same as those of the ellipsoid of GRS1980. The gravitational mass (GM) constant adopts the value of WGS-84 (Wei, 2003).
It should be pointed out that there exists little difference between the BDC coordinate system and the GPS geodetic system (GGS-84). The flattening of the ellipsoid of BDC is f = 1/298.257222101, which is different from that of GPS with f = 1/298.257223563. In theory, the biggest offset introduced by the two flattening ratios is within 1 millimeter in the equator. This kind of difference may be neglected, that is, the coordinate references of BeiDou system and GPS are consistent.
BDC is realized by BeiDou Terrestrial Reference Frame (BTRF), which is connected to CTRF 2000. The CTRF 2000 adopts the same standards as those of the ITRF. There are 47 International GNSS Service (IGS) stations evenly distributed over the world (Figure 1), including those IGS stations in China: BJFS, CHAN, KUNM, LHAS, SHAO, URUM, WUHN, and XIAN (Figure 2) that were used in the integrated adjustment of CTRF. Consistency in definition and diversity in realization will be beneficial for compensating the systematic errors.
Three levels of CTRF are included: the first level is the IGS and continuously operating reference stations (CORS) (28 stations) at the 3 mm level; the second level is the 2000 National GPS Network with about 2,500 stations at 3 cm level (Yang et al., 2007, 2009); and the third level is the combined adjusted network of astro-geodetic network and 2000 National GPS Network with 50,000 stations at 3 dm level (Yang et al., 2005).
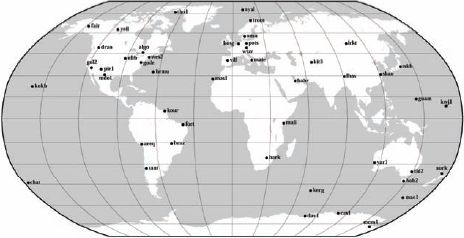
FIGURE 1 The IGS stations used in the CTRF establishment.
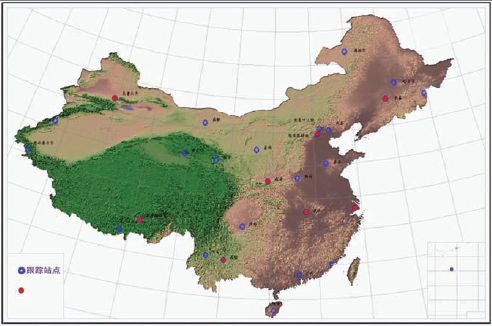
FIGURE 2 IGS stations in China.
Problems of CTRF 2000 and BTRF
Yet, there is quite some room for improvement for CTRF 2000 and BDC. The accuracy of CTRF 2000 is not so homogeneous compared to ITRF. Only 28 CORS and about 1,000 monitoring stations with high accuracy were used in the CGCS2000. The geometry of CTRF is quite weak. The positional velocities were not provided. BRTF is not integrated in the CTRF 2000; only the GNSS observation campaign was carried out.
One more problem is that the crustal deformation information is not included in CTRF or BTRF. The CRTF station movements are generally in an eastern direction. Especially the velocities of the western part of China are significant. Therefore, CTRF and BTRF, which were established 10 years ago, may be problematic in accuracy and reliability for the users with highly accurate positioning requirements.
Future of CTRF 2000 and BDC
CORS stations will be increased from 28 to 260 and will consist of 3 co-located stations with VLBI, six co-located stations with fixed SLR, and the establishment of 232 new stations. Regional stations will be increased from 1,000 to 2,000. Many more national CORS stations will be established and integrated.
BTRF will be connected to CTRF and ITRF by a new measurement project. For interoperability, setting up new overseas BTRF stations is in consideration. Multi GNSS (including BeiDou system) with their multiple frequencies should be applied in BTRF maintenance to realize interchangeability.
The new integrated adjustment of BTRF stations and updated CTRF stations will be carried out. The adjustment of the measurements of BTRF stations with the prior information of ITRF will be performed.
Unified orbit determination strategies using the same terrestrial tracking stations with the same measurements for all GNSS constellations are also beneficial for interchangeability.
BEIDOU TIME SYSTEM (BDT)
Definition of BDT
BDT is an internal, continuous navigation time scale, without leap second. The basic unit is the SI second. The largest unit used to state BDT is one week, which is defined as 604,800 seconds. BDT is counted by the week number (WN) and the second of week (SoW). The zero point is at January 1, 2006 (Sunday) UTC 00h00m00s.
Maintenance of BDT
BDT is realized by composite clocks. It is maintained by a time and frequency system (TFS) located at the master control station (MCS). TFS is mainly composed of five elements: (1) clock set (CS), (2) inter-measurement element (IME), (3) outer-comparison element (OCE), (4) data processing element (DPE), (5) and signal generation element (SGE). IME measures the original time and frequency signals from CS and gives out the clock differences both in time and frequency in a circular pattern. The offsets of BDT with respect to other time scales, especially to UTC, are obtained by OCE. DPE completes the calculation in a given algorithm to give a relative uniform time scale as the time reference for the whole navigation system, which is called BDT. In line with BDT, SGE exerts a frequency adjustment to the frequency signal from MC, and generates all the real physical time and frequency signals requested in MCS. In order to be as consistent as possible with UTC, BDT may steer to an interposed frequency adjustment after a period of time (more than 30 days) according to the situation, but the quantity of the adjustment is not allowed to be more than 5 × 10E-15.
Performance Analysis of BDT
The performance of BDT includes the evaluations of the time frequency accuracy, stability, and offset with UTC. The evaluation methods are usually divided into GPS satellite common view links (Liu et al., 2011), GEO satellite common view links, and two-way time frequency comparison links (Liu et al., 2009).
The test shows that the results obtained from the three kinds of links are consistent. Only the results obtained by GPS satellite common view link are given. The performance test was carried out from June 12 to October 8, 2010.
The bias of a hydrogen clock referred to BDT is shown in Figure 3. The bias deducted with frequency offset is shown in Figure 4. The frequency stability of the clock is shown in Figure 5. The time offset between BDT and NUTC is shown in Figure 6. The time offsets between BDT to UTC and BDT to GPST are also calculated through National UTC from NTSC (National Timing Service Center) and are shown in Figures 7 and Figure 8, respectively.
The performance of TFS is listed as follows: time accuracy is better than 2 × 10E-14; long stability is better than 1 × 10E-14/1 day, 6 × 10E-15/5 days, 5 × 10E-15/10 days and 6 × 10E-15/30 days. The time bias |BDT-UTC| is smaller than 100 ns (modulo one second).
The performance of the satellite clock is evaluated. The observed deviations of the satellite clock with respect to BDT and the bias of satellite clock taken off the mean clock rate are shown in Figures 9 and 10, respectively.
The observed Allen variance and Hadamard variance of the satellite clock are calculated and shown in Figures 11 and 12, respectively.
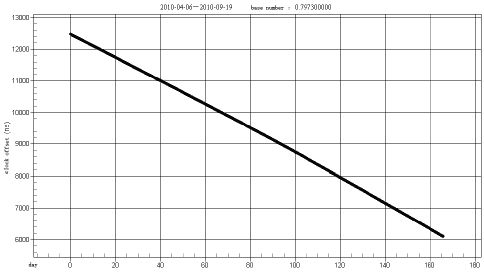
FIGURE 3 Bias of a hydrogen clock referred to BDT.
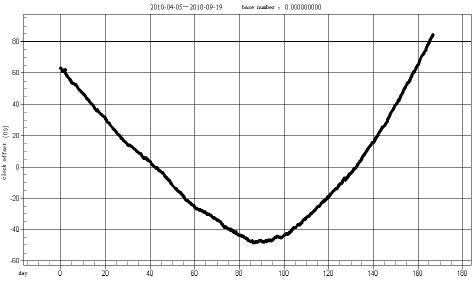
FIGURE 4 Bias deducted with frequency offset.
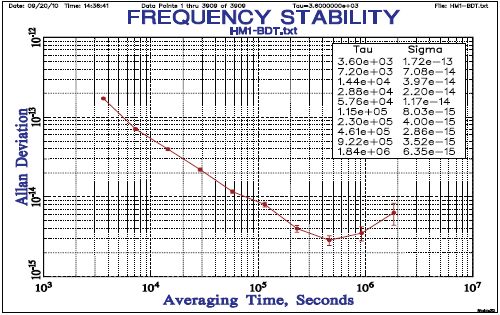
FIGURE 5 Frequency stability of the clock.
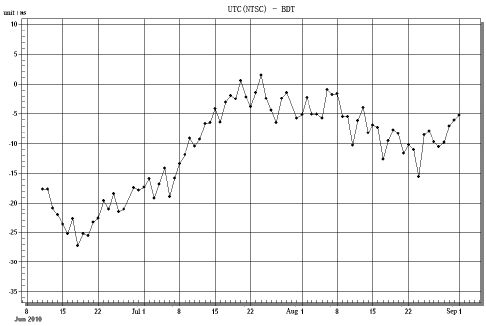
FIGURE 6 Time offset between BDT and NUTC.
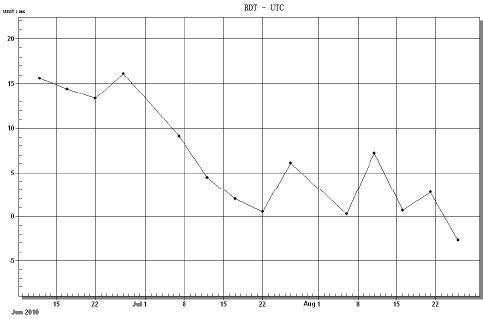
FIGURE 7 Time offset of BDT and UTC.
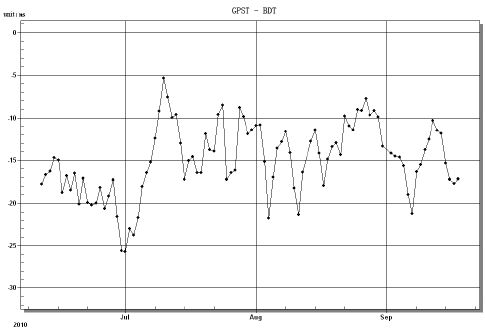
FIGURE 8 Time offset between BDT and GPST.
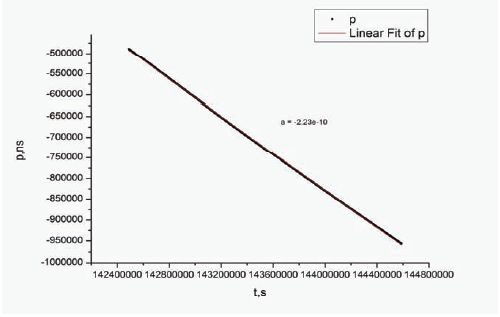
FIGURE 9 Bias of satellite clock with respect to BDT.
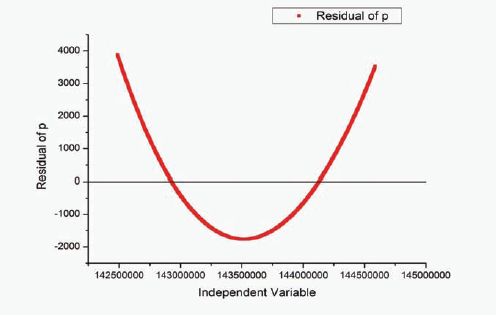
FIGURE 10 Bias taken off mean clock rate.
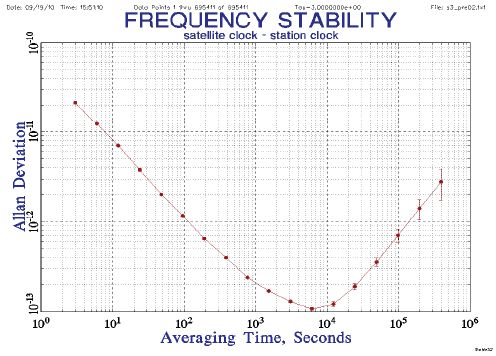
FIGURE 11 Observed Allan variance of satellite clock.
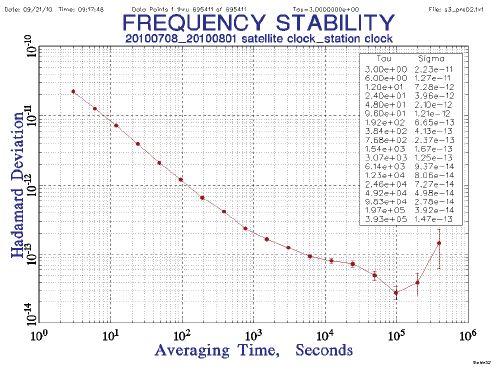
FIGURE 12 Hadamard variance of satellite clock.
The services of BDT are divided into one-way RDSS services, two-way RDSS services, and one way RNSS services. The uncertainty of RDSS one-way service is from 100 ns to 50 ns; the uncertainty of two-way RDSS service is from 20 ns to 10 ns; and the uncertainty of RNSS one-way service is about 50 ns.
Future Developments of BDT
First of all, the establishment of accurate relation/time offset between BDT to UTC needs to be strengthened. Two-way satellite time and frequency transfer is still working. There will build fiber chains of time and frequency transfer between MCS and the NTSC of the Chinese Academy of Science, National Institute of Metrology, etc. The time offset of BDT with respect to UTC can be obtained indirectly.
In order to improve the long stability of BDT and also improve the interoperability of BDT with other satellite navigation time systems, the number of clocks needs to be increased. Measurement hardware and software should be modified. The GNSS time monitor system is to be set up for observing the time differences and calculating the time offset. The offset or interoperability parameters of the time system will be broadcasted in BD NAV data. Thus, the time system of BeiDou navigation system will be well aligned to UTC for interoperability. For further interchangeability, new clocks with high accuracy and reliability are necessary.
CONCLUSIONS
The BDC system is aligned to ITRS and other GNSS coordinate systems. CTRF will be updated by new observation projects. The consistency of the BDC system and ITRS will be strengthened. A GNSS observation campaign will be regularly carried out between BTRF and CTRF. BeiDou time is accurate, stable. and reliable. BDC and BDT systems meet the requirements of compatibility and interoperability. The ultimate goal in improving BDT and BTC is to realize the interchangeability, which is a very long way to go.
REFERENCES
Liu, L., L. Zhu, and C. Han. 2009. The model and experimental analysis of two-way satellite and ground time transfer. Astronomy Paper 50(2): 189–196.
Liu, L., et al. 2011. The Method and Experiment Analysis for Two-Way Satellite Common-View Time Transfer. China Satellite Navigation Conference 2011 (CSNC 2011), Shanghai, China (in Chinese).
Wei. Z. 2003. National geodetic coordinate system: to next generation. Geomatics and Information Science of Wuhan University 28(2): 138–143 (in Chinese).
Yang, Y. 2009. Chinese geodetic coordinate system 2000. Chinese Science Bulletin 54: 2714–2721.
Yang, Y., M. Zha, L. Song, Z. Wei, Z. Wang, G. Ouyang, B. Xu, X. Wu, and J. Wang. 2005. Combined adjustment project of national astronomical geodetic networks and 2000’ GPS control network. Progress in Natural Science 15(5): 435–441.
Yang. Y., Y. Tang, C. Chen, M. Wang, P. Zhang, X. Wang, L. Song, and Z. Zhang. 2007. National 2000’ GPS control network of China. Progress in Natural Science 17(8): 983–987.
Yang. Y., Y. Tang, C. Chen, M. Wang, P. Zhang, X. Wang, L. Song, and Z. Zhang. 2009. Integrated adjustment of Chinese 2000’ GPS control network. Survey Review 41(313): 226–237.












