
TA04 Robotics, Tele-Robotics,
and Autonomous Systems
INTRODUCTION
The draft roadmap for Technology Area (TA) 04, Robotics, TeleRobotics, and Autonomous Systems, was unique in that it did not describe or provide supporting text for the level 3 technologies in its portion of the technology area breakdown structure (TABS). For this roadmap to be parallel with the other 13 roadmaps, it would need to be largely rewritten to do the following:
• Define a clear technology breakdown structure of the TA04 roadmap to level 3 that identifies technologies for development consideration without predetermination of technical solutions.
• Provide supporting roadmap text for each of the level 3 technologies, including an explanation of each technology’s potential application(s) and motivating its development.
• Ensure that each of the included level 3 technologies connects to one or more of the top challenges that are also identified within the applicable roadmap document.
Although the existing roadmap for TA04 includes a version of a technology breakdown structure to level 3 in its included Figure 2, the document did not meet the criteria above for the following reasons:
• The breakdown structure in the existing TA04 roadmap (see Figure 2 in the draft roadmap) does not correlate to any of the document’s supporting text below level 2.
• The level 3 categories included in the existing TA04 roadmap often identify candidate technical solutions rather than technology development categories.
As a result, the steering committee and the responsible panel did not have a list of well-defined level 3 technologies to execute the study statement of task. As detailed below, the panel responded by generating a substantially revised set of level 3 technologies. The content of some of the technologies in the revised TABS (the ones that cover important technology gaps in the draft roadmap) are described in the remainder of this introduction. All of the TA04 technologies that the panel assessed as high-priority are described in detail in the section titled “High-Priority Level 3 Technologies.”
The panel did not make any changes to the set of seven level 2 technology subareas in the draft roadmap for TA04:1
• 4.1 Sensing and Perception
• 4.2 Mobility
• 4.3 Manipulation
• 4.4 Human-Systems Integration
• 4.5 Autonomy
• 4.6 Autonomous Rendezvous and Docking
• 4.7 Robotics, Tele-Robotics, and Autonomous Systems (RTA) Systems Engineering
Because the TA04 roadmap did not include a viable list of level 3 technologies, public comments for the TA04 roadmap were solicited using these level 2 technology subareas rather than at level 3 as was done for all the other roadmaps.
The TA04 draft roadmap supports NASA space missions with the development of new capabilities to enable new missions and enhance the efficiency and effectiveness of existing mission concepts. Through a combination of dexterous robotics, better human/robotic interfaces, improved mobility systems, and greater sensing and perception, TA04 technologies will extend the reach of human and robotic exploration. Improvements in autonomy will allow robotic and human systems to operate with greater efficiency and effectiveness, both for near-Earth missions and in deep space. TA04 technologies will enable robotic and crewed servicing missions, which have the potential to fundamentally change the way satellites are designed, built, and operated.
This roadmap describes the robotics, tele-robotics, and autonomy technology developments that are necessary to meet the needs of future missions, provide enhanced capabilities, or enable new mission concepts. This includes identification of representative future missions and key capabilities and investments that will enable or enhance these missions. The roadmap focuses on several key issues for the future of robotics and autonomy: enhancing or exceeding human performance in sensing, piloting, driving, manipulating, and rendezvous and docking; development of cooperative and safe human interfaces to form human-robot teams; and improvements in autonomy to make human crews independent from Earth and make robotic missions more capable.
As noted above, the panel created a new set of level 3 technologies for TA04 (see Table G.1). (The complete, revised TABS for all 14 Tas is shown in Appendix B.) This new set of level 3 technologies is consistent both with the relevant panel’s understanding of applicable TA04 technology needs and with the intent of much of the existing roadmap text. Some new level 3 technologies address important technology gaps within the existing TA04 roadmap:
• 4.1.6. Multi-Sensor Data Fusion. Since effective robotics operation often requires the integrated use of data collected simultaneously from a variety of sensors, the fusion of that data into more useful information is a critical capability. The original TA04 TABS included the narrower topic of Sensor Fusion for Grasping (4.5.3), which this technology treats more broadly.
• 4.1.7. Mobile Feature Tracking and Discrimination. This area covers the unique challenges to object tracking and discrimination faced by a surface mobility vehicle while in motion.
• 4.2.1. Extreme Terrain Mobility. Extreme terrain includes cliffs, crater walls, and very rugged surfaces. Means of mobility to safely reach and loiter at designated locations on such terrain poses unique challenges.
• 4.2.2. Below-Surface Mobility. Vehicles that would transit under regolith, in caves, or immersed in bodies of liquid have mobility challenges not covered in other level 3 technology entries in this roadmap.
• 4.3.3. Modeling of Contact Dynamics. Robotic vehicles that dock or that manipulate objects require detailed models of the contact dynamics to enable proper control of their interactions.
![]()
1The draft space technology roadmaps are available at http://www.nasa.gov/offices/oct/strategic_integration/technology_roadmap.html
TABLE G.1 Technology Area Breakdown Structure for TA04, Robotics, Tele-Robotics, and Autonomous Systems
| NASA Draft Roadmap (Revision 10) | Steering Committee-Recommended Changes |
| TA04 Robotics, Tele-Robotics and Autonomous (RTA) Systems | The technologies have been largely rewritten. |
|
4.1. Sensing and Perception |
4.1. Sensing and Perception |
|
4.1.1. Stereo Vision |
4.1.1. Vision |
|
4.1.2. LIDAR |
4.1.2. Tactile Sensing |
|
4.1.3. Proximity Sensing |
4.1.3. Natural Feature Image Recognition |
|
4.1.4. Sensing Non-Geometric Terrain Properties |
4.1.4. Localization and Mapping |
|
4.1.5. Estimating Terrain Mechanical Properties |
4.1.5. Pose Estimation |
|
4.1.6. Tactile Sensing Arrays |
4.1.6. Multi-Sensor Data Fusion |
|
4.1.7. Gravity Sensors & Celestial Navigation |
4.1.7. Mobile Feature Tracking and Discrimination |
|
4.1.8. Terrain Relative Navigation |
4.1.8. Terrain Classification and Characterization |
|
4.1.9. Real-time Self-calibrating of Hand-eye Systems |
|
|
4.2. Mobility |
4.2. Mobility |
|
4.2.1. Simultaneous Localiz. and Mapping |
4.2.1. Extreme Terrain Mobility |
|
4.2.2. Hazard Detection Algorithms |
4.2.2. Below-Surface Mobility |
|
4.2.3. Active Illumination |
4.2.3. Above-Surface Mobility |
|
4.2.4. 3-D Path Planning w/Uncertainty |
4.2.4. Small Body/Microgravity Mobility |
|
4.2.5. Long-life Extr. Enviro. Mechanisms |
|
|
4.2.6. Robotic Jet Backpacks |
|
|
4.2.7. Smart Tethers |
|
|
4.2.8. Robot Swarms |
|
|
4.2.9. Walking in Micro-g |
|
|
4.3. Manipulation |
4.3. Manipulation |
|
4.3.1. Motion Planning Alg., High DOF |
4.3.1. Robot Arms |
|
4.3.2. Sensing and Control |
4.3.2. Dexterous Manipulators |
|
4.3.3. Robot Arms (light, high strength) |
4.3.3. Modeling of Contact Dynamics |
|
4.3.4. Dexterous Manipul., Robot Hands |
4.3.4. Mobile Manipulation |
|
4.3.5. Sensor Fusion for Grasping |
4.3.5. Collaborative Manipulation |
|
4.3.6. Grasp Planning Algorithms Robotic Drilling Mechanisms |
4.3.6. Robotic Drilling and Sample Processing |
|
4.3.7. Multi-arm/Finger Manipulation |
|
|
4.3.8. Planning with Uncertainty |
|
|
4.4. Human-Systems Integration |
4.4. Human-Systems Integration |
|
4.4.1. Crew Decision Support Systems |
4.4.1. Multi-Modal Human-Systems Interaction |
|
4.4.2. Immersive Visualization |
4.4.2. Supervisory Control |
|
4.4.3. Distributed Collaboration |
4.4.3. Robot-to-Suit Interfaces |
|
4.4.4. Multi Agent Coordination |
4.4.4. Intent Recognition and Reaction |
|
4.4.5. Haptic Displays |
4.4.5. Distributed Collaboration |
|
4.4.6. Displaying Range Data to Humans |
4.4.6. Common Human-Systems Interfaces |
|
4.4.7. Safety, Trust, and Interfacing of Robotic/Human Proximity Operations |
|
|
4.5. Autonomy |
4.5. Autonomy |
|
4.5.1. Spacecraft Control Systems |
4.5.1. Vehicle System Management and FDIR |
|
4.5.2. Vehicle Health, Prog/Diag Systems |
4.5.2. Dynamic Planning and Sequencing Tools |
|
4.5.3. Human Life Support Systems |
4.5.3. Autonomous Guidance and Control |
|
4.5.4. Planning/Scheduling Resources |
4.5.4. Multi-Agent Coordination |
|
4.5.5. Operations |
4.5.5. Adjustable Autonomy |
|
4.5.6. Integrated Systems Health Management |
4.5.6. Terrain Relative Navigation |
|
4.5.7. FDIR and Diagnosis |
4.5.7. Path & Motion Planning with Uncertainty |
|
4.5.8. System Monitoring and Prognosis |
|
|
4.5.9. V&V of Complex Adaptive Systems |
|
|
4.5.10. Automated Software Generation |
|
|
4.5.11. Software Reliability |
|
|
4.5.12. Semi Automatic Systems |
|
| NASA Draft Roadmap (Revision 10) | Steering Committee-Recommended Changes |
|
4.6. Autonomous Rendezvous and Docking |
4.6. Autonomous Rendezvous and Docking |
|
4.6.1. Rendezvous and Capture |
4.6.1. Relative Navigation Sensors (long, mid, and near range) |
|
4.6.2. Low impact and Androgenous Docking Systems and Interfaces |
4.6.2. Relative Guidance Algorithms |
|
4.6.3. Relative Navigation Sensors |
4.6.3. Docking & Capture Mechanisms/Interfaces |
|
4.6.4. Robust AR&D GN&C Algorithms and FSW |
|
|
4.6.5. Onboard Mission Manager |
|
|
4.6.6. AR&D Integration and Standardization |
|
|
4.7. RTA Systems Engineering |
4.7. RTA Systems Engineering |
|
4.7.1. Human safety |
4.7.1. Modularity/Commonality |
|
4.7.2. Refueling Interfaces and Assoc. Tools |
4.7.2. Verification and Validation of Complex Adaptive Systems |
|
4.7.3. Modular/Serviceable Interfaces |
|
|
4.7.4. High Perf., Low Power Onboard Computers |
4.7.3. Onboard Computing |
|
4.7.5. Environment Tolerance |
|
|
4.7.6. Thermal Control |
|
|
4.7.7. Robot-to-Suit Interfaces |
|
|
4.7.8. Common Human-Robot Interfaces |
|
|
4.7.9. Crew Self Sufficiency |
|
• 4.3.4. Mobile Manipulation. Performing any kind of manipulation with a surface vehicle while it is mobile adds complexity to the operation that will require dedicated technology to overcome.
• 4.4.4. Intent Recognition and Reaction. More effective robotic aiding of humans will require means for the robots to reliably recognize human intent through speech, gesture, or facial expression to enable appropriate responses.
• 4.4.7. Safety, Trust, and Interfacing of Robotic/Human Proximity Operations. Human reliance on proximate robots for critical support capabilities will necessitate a high level of confidence that the robot will respond usefully, safely, and predictably. This capability necessitates means for integrated interaction assessment and associated verification and validation. The original TA04 TABS included the topic of Human Safety (4.7.1), which has been broadened.
• 4.5.3. Autonomous Guidance and Control. This capability requires the means to adjoin effective decision making algorithms regarding appropriate and efficient vehicle trajectory, path, and orientation management with suitably robust guidance and control implementations.
• 4.5.5. Adjustable Autonomy. There are many levels of autonomy that can be designed into systems. An important capability would provide means to adapt the level of applied autonomy to the mission circumstances, either automatically or by providing a means for timely human command. The original TA04 TABS included the topic of Semi Automatic Systems (4.5.12), which has been broadened.
The other new level 3 technologies reorder, restate, or regroup the entries from the original TABS. If NASA accepts the recommended restructuring of this roadmap, it may be prudent for the NASA roadmap team to reconvene to revise the roadmap to include these new technologies and to provide descriptions of all of the TA04 level 3 technologies.
TOP TECHNICAL CHALLENGES
The panel identified six top technical challenges for TA04. These are listed below in priority order.
1. Rendezvous: Develop the capability for highly reliable, autonomous rendezvous, proximity operations, and capture/attachment to (cooperative and non-cooperative) free-flying space objects.
The ability to perform autonomous rendezvous and safe proximity operations and docking/grappling is central to the future of mission concepts for satellite servicing, Mars sample returns, active debris removal scenarios, and other cooperative space activities. Major challenges include improving the robustness of the rendezvous and capture process to ensure successful capture despite wide variations in lighting, target characteristics, and relative motion.
2. Maneuvering: Enable robotic systems to maneuver in a wide range of NASA-relevant environmental, gravitational, and surface and subsurface conditions.
Current crewed and robotic rovers cannot access extreme lunar or martian terrain, eliminating the possibility of robotic access and requiring humans to park and travel on foot in suits. Extreme terrain mobility would allow robotic rovers access to more scientifically interesting samples. In microgravity, locomotion techniques on or near asteroids and comets are undeveloped and untested. Challenges include developing robotics to travel into these otherwise denied areas, developing techniques to grapple and anchor with asteroids and non-cooperative objects, or building crew mobility systems to move humans into these challenging locations.
3. In Situ Analysis and Sample Return: Develop subsurface sampling and analysis exploration technologies to support in situ and sample return science missions.
A top astrobiological goal and a fundamental NASA exploration driver is the search for life or signs of previous life in our solar system, and NASA scientists and engineers have been told to “follow the water.” A significant planetary science driver exists to obtain unaltered samples (with volatiles intact) for either in situ analysis, or return to Earth from planetary bodies both large and small. These pristine samples are found subsurface and are (mostly) acquired with robotic drilling devices. Due to the autonomy demands of robotic drilling/sampling along with very low mass and power constraints, terrestrial drilling technologies (including the National Science Foundation and U.S. Army ice drilling efforts) have limited applicability. Robotic planetary drilling and sample handling is a new and different capability.
4. Hazard Avoidance: Develop the capabilities to enable mobile robotic systems to autonomously and verifiably navigate and avoid hazards.
Human drivers have a remarkable ability to perceive terrain hazards at long range, but robotic systems lag behind due to the large computational throughput requirements needed to quickly assess subtle terrain geometric and non-geometric properties fast enough to maintain speeds near the vehicle limits.
5. Time-Delayed Human-Robotic Interactions: Achieve more effective and safe human interaction with robotic systems (whether in proximity or remotely) that accommodate any time-delay effects.
More effective and safe human interaction with robotic systems has a number of different focuses that range from the potential dangers of proxemic interactions to remote supervision with or without time delays. Proxemic interactions require that the robotic systems can safely operate and communicate their actions and intent to the humans working in close proximity, either in the case of peer-based interaction or independent actions. Similarly, humans interacting with robotic systems in close proximity must be able to provide direction and instruction to the robotic systems.
Remote interaction with robotic systems do not pose the same immediate potential level of danger to humans as close proximity interactions; however, it is often significantly more difficult for a remote human to fully understand the context of the environment in which the robotic system functions and the status of the system. This lack of understanding can be further complicated by the effects of communication time delays, which can range from fractions of a second to significant periods of time. An improper level of understanding often results in incorrect
or improper instructions being provided by the human to the robotic system. Robotic systems for missions with long-duration communication time delays must be developed to support autonomous actions without immediate human interaction. Such systems must also ensure that the remote human is provided with tools to quickly understand the situation once communications are received from the robotic system.
6. Object Recognition and Manipulation: Develop means for object recognition and dexterous manipulation that supports engineering and science objectives.
Object recognition requires sensing, often fusing multiple sensing modalities, with a perception function that can associate the sensed object with an object that is understood a priori. Sensing approaches to date have combined machine vision, stereo vision, lidar, structured light, and radar, while perception approaches often start with CAD models or models created by a scan with the same sensors that will be used to identify the object later. Major challenges include the ability to work with a large library of known objects, identifying objects that are partially occluded, sensing in poor (high, low, and sharply contrasting) lighting, estimating the pose of quickly tumbling objects, and working with objects at near and far range. These challenges are important for object manipulation and in mobility for object following and avoidance.
While human hands are generally capable, a robotic hand with equivalent or superior grasping ability would avoid the added complexity of robot interfaces on objects, and provide a sensate tool change-out capability for specialized tasks. Dexterity can be measured by range of grasp types, scale, strength, and reliability. Challenges include fundamental actuation and sensing physics, discrimination, contact localization, extrinsic and intrinsic actuation, and hand/glove coverings that do not attenuate sensor or object motion but are rugged when handling rough and sharp objects.
QFD MATRIX AND NUMERICAL RESULTS FOR TA04
The process used to evaluate the level 3 technologies is described in detail in Chapter 2. The results of the evaluation are shown in Figures G.1 and G.2, which show the relative ranking of each technology. The panel assessed eight of the technologies as high priority. Seven of these were selected based on their QFD scores, which significantly exceeded the scores of lower ranked technologies. After careful consideration, the panel also designated 4.2.4 Small Body/Microgravity Mobility as a high-priority technology.2
CHALLENGES VERSUS TECHNOLOGIES
Figure G.3 shows the relationship between the individual level 3 TA04 technologies and the top technical challenges. Note that the lowest-priority technologies as determined by QFD rankings tend not to be strongly connected to the top technical challenges. All but one of the high-priority technologies have a strong connection to two or more of the top technical challenges. Just two of the medium-priority technologies have a strong connection to one of the top technical challenges. This shows a good level of consistency between the evaluations and the QFD rankings.
HIGH-PRIORITY LEVEL 3 TECHNOLOGIES
Panel 2 identified 8 high-priority technologies in TA04. The justification for ranking each of these technologies as a high priority is discussed below.
![]()
2In recognition that the QFD process could not accurately quantify all of the attributes of a given technology, after the QFD scores were compiled, the panels in some cases designated some technologies as high priority even if their scores were not comparable to the scores of other high-priority technologies. The justification for the high-priority designation of all the high-priority technologies for TA04 appears in the section “High-Priority Level 3 Technologies,” below
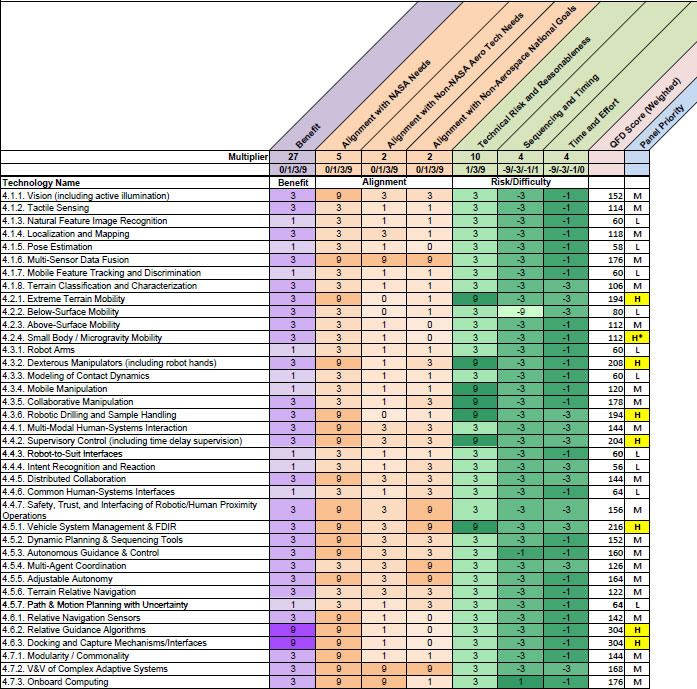
FIGURE G.1 Quality function deployment (QFD) summary matrix for TA04 Robotics, Tele-Robotics, and Autonomous Systems. The justification for the high-priority designation of all high-priority technologies appears in the section “High-Priority Level 3 Technologies.” H = High Priority; H* = High Priority, QFD score override; M = Medium Priority; L = Low Priority.
Technology 4.6.2, Relative Guidance Algorithms
Relative guidance technologies encompass algorithms that determine the desired trajectories to be followed between vehicles performing rendezvous (at long range), proximity operations (at short range), and/or docking and capture. These algorithms must anticipate the applicable environmental field effects that drive the relative motion of the spacecraft with respect to the objects of interest, the nature of the trajectory change/attitude control effectors in use, as well as the quality of the inertial and relative navigation state data available to the guidance algorithms. To
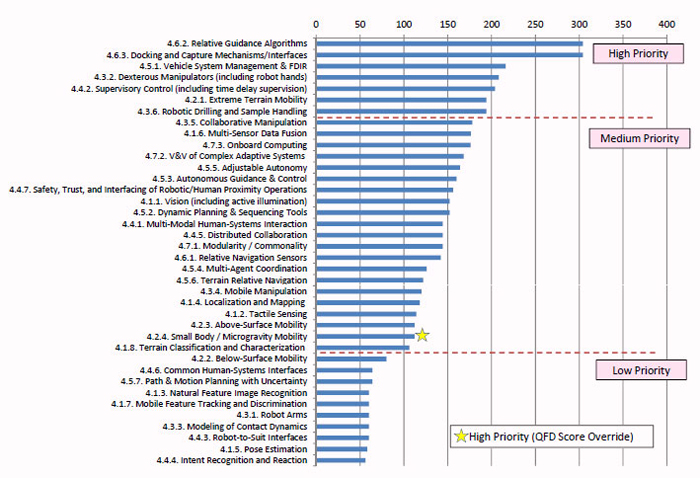
FIGURE G.2 Quality function deployment rankings for TA04 Robotics, Tele-Robotics, and Autonomous Systems.
date, most spacecraft relative guidance functionality has been accomplished on the ground with reliance on communication links to uplink mission maneuver target data. This technology provides real-time, onboard algorithmic functionality that can calculate and manage spacecraft maneuvers to achieve specific trajectory change objectives.
Ground-managed relative guidance for spacecraft with large impulsive thrusters is operational (TRL 9), but the TRL drops to 3-5 for systems applying alternative (e.g., electric, low-thrust, and/or variable-thrust) propulsion systems, when performing AR&D with tumbling bodies, or when trying to guarantee algorithmic convergence to enable onboard use in space without ground or crew intervention. The alignment to NASA’s needs is high because relative guidance impacts crewed deep space exploration, sample return, servicing, and orbital debris mitigation. Some aspects of relative guidance verification and validation are dependent on evaluation in an actual space environment. This can be supported by experiments run parallel to baseline relative guidance operations on ISS visiting vehicles.
The committee assessed the relative guidance technologies as “game-changing” because they enable an array of NASA missions including deep space human exploration missions, Mars sample return, large orbital debris capture, and station keeping for closely coordinated spacecraft constellations. The safety margins of deep space missions (including human exploration missions) could be substantially improved by reducing dependence on ground management of relative guidance that would experience long (and risky) communication lags.
Many of the historical relative guidance capability developments are the direct result of NASA investments, and were achieved by NASA personnel, supporting contractors, and universities. That will likely continue to be the case for the foreseeable future. Non-NASA investment in this area is likely restricted to specialized military organizations and by organizations located in other space-faring nations. Continued relative guidance advances for the U.S. civil space sector will likely depend on NASA technology development investment.
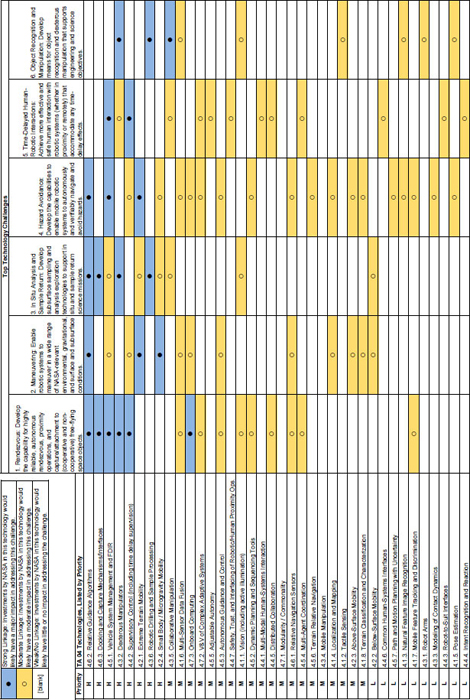
FIGURE G.3 Level of support that the technologies provide to the top technical challenges for TA04 Robotics, Tele-Robotics, and Autonomous Systems.
Technology 4.6.3, Docking and Capture Mechanisms/Interfaces
Docking and capture mechanisms enable the physical capture and attachment, as well as subsequent safe release of two bodies in space that achieve part of their mission objectives when operating while joined. Docking and capture mechanisms/interfaces facilitate final relative alignment prior to docking/capture, enable initial soft capture/docking and then function to complete hard docking/mate. For some missions they also do the reverse when a flight scenario calls for separation of docked bodies. Docking interfaces to date have been designed for man-in-the-loop rendezvous/docking systems and operations; this is true even for the semi-automated Russian ISS cargo docking interface. Robotic or automated rendezvous and docking operations will not involve real-time human control. Development of a physical docking and capture interface for AR&D operations would greatly simplify the control demands for a working AR&D system.
Generic/modular AR&D docking and capture systems have not been tested in space and are presently only at TRL 2 or 3. While the DARPA Orbital Express Mission did perform robotic dockings, including some that were done autonomously, the design of the docking and capture mechanisms/interfaces were intended only to enable performing this demonstration. The alignment to NASA’s needs is high because this technology will impact crewed deep space exploration, sample return, servicing, and orbital debris mitigation. The ISS could be an effective platform for evaluating the performance of new docking and capture mechanisms by enabling the repeated execution of experiments either inside or outside the ISS to test the reliability of these AR&D interfaces in a microgravity environment.
This technology was deemed a game changer due to the improvements in reliability of AR&D operations that will come from new interfaces that facilitate AR&D success and reduce the demands for AR&D control. Variations of docking and capture mechanisms enable transfer of crew between delivery and destination vehicles, provide means for attachment of added equipment modules, facilitate execution of robotic servicing missions, and could enable grapple/capture of inactive, possibly tumbling spacecraft for missions such as orbital debris mitigation. The development of a new spacecraft docking or capture interface (or multiple ones) designed to facilitate reliable AR&D operations will have a major beneficial impact on the overall development of a cost effective and practical AR&D architecture.
NASA has been a primary developer of the docking and capture capabilities to date. While Russia, Japan, and Europe have also developed applicable technology, it is important that the United States develop its own capability to ensure a means of accomplishing scientific and exploration missions of national priority and importance. National security agencies are leveraging applicable developments by NASA, and potential commercial users of the technology will rely heavily on technologies developed by NASA.
Technology 4.5.1, Vehicle Systems Management and FDIR
The panel combined the related and overlapping topics of integrated systems health management (ISHM), fault detection, isolation, and recovery (FDIR), and vehicle systems management (VSM). Together these algorithms provide the crucial capability for an autonomous spacecraft to operate safely and reliably, even in the face of changing mission objectives and/or vehicle failures. ISHM/FDIR/VSM will improve the reliability of future missions by providing a diagnostic capability that helps ground or crew failure assessment and an automated capability to fix/overcome faults; increasing robotic mission flexibility in response to failures; and increasing crew safety in the event of a detected need for crew escape and abort.
ISHM and FDIR are commonplace in many terrestrial applications, and basic FDIR capabilities have been flown on the space shuttle and the ISS, giving a TRL of 8-9 for the basic capabilities, but only a TRL of 3-5 for the advanced capabilities required for future, more autonomous spacecraft missions. Also, the integration of different algorithms to provide a consistent management function has not yet been accomplished. The required research is well aligned with the NASA experience and capabilities and consistent with NASA’s past roles. Access to the ISS is not required for this technology development.
NASA might be able to draw from the significant other work being done in this area (e.g., commercial robotics, aircraft/UAVs, and commercial spacecraft), but given the length, variety, and complexity of the missions,
the challenges faced by NASA are unique and it is very unlikely that they will be fully addressed by an external research organization. As such, NASA investment in this technology area is critical.
The steering committee assessed the ISHM/FDIR/VSM systems as providing a major benefit due to the potential to significantly improve the robustness and reliability of future missions. The alignment to NASA’s needs is high because it will impact many missions, such as deep space exploration, robotic science missions, planetary landers and rovers. The alignment with other aerospace needs is considered to be medium, as this research has the potential to have a large impact on a subset of other aerospace sectors, such as commercial spacecraft. The alignment with national needs is considered to be higher, as improving reliability and confidence in the autonomy algorithms is one of the major hurdles to deployment/acceptance in many other safety critical sectors (e.g., ground and air transportation) and for autonomous operations in vicinity of humans. Thus autonomous platform operations in these other sectors could also benefit from NASA advances in these technology areas. The risk is assessed to be moderate to high, within the bounds of NASA’s acceptable risk levels for technology development. In particular, a continued capability evolution of the ISHM/FDIR/VSM techniques that have been developed for many years can be applied to develop a flight proven foundation. Due to the potential for major mission improvements, strong alignment with NASA needs, and reasonable risk and development effort, ISHM/FDIR/VSM are rated as high-priority technologies.
Technology 4.3.2, Dexterous Manipulation
Dexterous Manipulation is a system-level technology that encompasses multiple stand-alone technology areas including: electro-mechanical devices for manipulators, end effectors, and sensor positioning; sensors for both tele-operated and autonomous control of joint, end point, and grasping functions; and control software for various levels of autonomy ranging from tele-operation to autonomous control. Dexterous Manipulation has great relevance for several current and future NASA applications:
• Use of dexterous manipulation for servicing and maintenance on the ISS can reduce the risk and cost of EVA operations. Moreover, control of operations from the ground would further unburden flight crews and leverage more extensive facilities not available on the ISS. In particular, the ISS is highly constrained by space, power, and thermal considerations. Ground facilities could incorporate larger displays, immersive user interface environments, and larger processing capacity to enable autonomous operations.
• Dexterous manipulation can enable remote satellite servicing and on-orbit assembly of larger structures.
• Applied to remote exploration, dexterous manipulation can provide the ability for scientists to experience and interact with an extra-terrestrial environment more naturally, ultimately improving the science return.
TRLs for dexterous manipulation range from 1 to 9. Since 1997, NASA has focused on the development of Robonaut, which has now been deployed to the ISS for evaluation. The result of this investment is a state-of-the-art system with dexterity approaching that of a suited astronaut. In addition, this system has passed the critical milestones associated with flight qualification and safety certification for use around astronauts. Development activities to date have focused primarily on human-in-the-loop tele-operation. Further, the high-bandwidth, low-latency communications requirement limits the utility of this system for remote operations where latency has adverse control stability effects.
To overcome these limitations, next-generation dexterous manipulation technologies must be able to operate with embedded control loops that can bypass the effects of large latencies and very low bandwidth associated with external operators. Two approaches have promise toward this objective. First, a combination of supervised autonomy coupled with autonomous sensing and control has the potential to endure very large latencies and can be implemented with limited bandwidth communication links. This approach relies on the development of autonomous skills that the remote manipulator can execute and then report the status thereof. Dexterous manipulation also relies heavily on developing human-system integration technologies (Subarea 4.4). Remote dexterous manipulation will benefit from the ability to autonomously recognize and control fundamental activities such as contact, grasping, and manipulation. If desired, NASA could explore options for extending Robonaut technologies and capabilities for operations in large latency and low-bandwidth environments.
While Robonaut is well suited for ISS operations, its size and weight preclude its use for exploration activities. Exploration missions could benefit significantly from a dexterous manipulation capability. However, significant advances in actuation technologies will reduce weight and power consumption while retaining end point forces, speed of response, and control bandwidth. NASA could benefit from the development of novel actuation technologies that dramatically increase the strength to weight ratio.
NASA has been at the forefront of developing dexterous manipulator systems that rely on tele-operation control. NASA has also worked well with DARPA under the MARS 2020 program to leverage common interests in manipulator technology. While NASA has focused on the electro-mechanical and human aspects of dexterous manipulation, DOD has placed a much greater emphasis on higher levels of autonomy and supervisory control necessary to achieve remote operations. NASA could either partner with these groups or leverage technologies currently under development to take advantage of complementary existing programs.
There is tremendous potential for dexterous manipulation beyond the confines of NASA applications including military operations (investigation and handling of improvised explosive devices), civilian hazardous materials operations and first responder operations, and manufacturing operations (increasing the level of automation of low-volume manufacturing).
The risk of dexterous manipulation capability development is varied. The deployment of Robonaut for use on the ISS in a strict tele-operation role has low risk. The development of means to tolerate higher remote operator latencies through the use of embedded automation increases the risk and necessary investment level. However, this is the area of dexterous manipulation that could have the largest payback for NASA, military, and civilian applications. Development of dexterous manipulation for remote exploration would require fundamental advancements in the areas of lightweight, highly efficient actuators and would entail greater risk and a longer technology development time horizon.
Technology 4.4.2, Supervisory Control
Supervisory Control was defined as incorporating the techniques necessary for controlling robotic behaviors using higher-level goals instead of low-level commands, thus requiring robots to have semi-autonomous or autonomous behaviors. This increases the number of robots a single human can simultaneously supervise, reducing the costs and impacts of time delays on remotely supported robotic teams, improving the synergy of combined human/robot teams, and facilitating distributed robot teams. Supervisory control for NASA also incorporates time-delayed supervision. Supervisory control provides major benefits because it will minimize the manpower impacts required to deploy robotic missions over long periods anywhere and anytime. This technology will support the design of game-changing science and exploration missions, such as new robotic missions at remote locations, and simultaneous robotic missions with reduced human oversight.
Limited supervisory control has been deployed for the Mars Rovers, thus basic capabilities have a high TRL (9), but the advanced capabilities have a relatively low TRL (2-3). Key components to be addressed include the development of robust high-level autonomous behaviors and control, multi-sensor fusion, clearly understood and usable presentations of information from multiple robots for human understanding, time-delayed interpretation and presentation of robot provided information, haptic feedback, and means for a supervisory control system to handle communication outages. This technology will not substantially benefit from access to the ISS.
The alignment to NASA’s needs is high due to the impact of reducing the number of personnel required to supervise robotic missions and the number of science and exploration missions to which the technology can be applied. Supervisory control generally has applications across the government agencies, including the Departments of Defense, Energy, and Homeland Security. Additionally, submersible unmanned vehicles can encounter similar time delay effects while under water; however, the communications time-delayed component is primarily unique to space exploration. Thus, NASA is uniquely positioned to take the lead to mature the technology to TRL 6, but there may be opportunities to collaborate with international partners, such as Japan, France, and Germany.
The alignment with other aerospace and national needs is considered to be moderate, since the results can impact supervisory control for any robotic system. The risk is assessed as moderate to high, based on the fact that providing supervisory control is a systems engineering problem, thus development of the technology is highly
dependent upon the development of underlying robotic and human-machine interaction capabilities. The program will need to leverage existing NASA and DOD capabilities in order to meet reasonable goals ensuring timely development of various related technologies, such as robust, autonomous behaviors. The concepts related to this technology are roughly sketched out and users should be clearly defined. This effort is easily justified when considering the potential benefits for both human and robotic exploration of the outer solar system and beyond. Thus, supervisory control is judged to be a high-priority technology.
Technology 4.3.6, Robotic Drilling and Sample Processing
Robotic Drilling and Sample Processing (RDSP) technologies refer to robotic drilling and drill-like technologies, as well as automated rock coring devices and new automated technologies that transfer, store, and process acquired samples such as sample caches, sample crushers, sample slicers, and sample-to-instrument carousels. In a game-changing manner, RDSP will improve the science return of robotic science missions to small bodies, moons, and planets. This is due to the almost uncontaminated, unaltered, and volatile rich nature of the samples acquired by the next-generation RDSP technology. RDSP technology developments will also benefit in situ resource utilization (ISRU) for human spaceflight to the Moon and small bodies through a better understanding of the raw materials available to human explorers in situ. For missions such as Mars Sample Return, the acquisition of uncontaminated samples is essential. Development of sample cache systems and sample transfer elements designed to facilitate reliable planetary protection implementations will be a significant benefit, as will the protection of samples from loss of volatiles during the return trip and the preservation of the samples physically from the re-entry environment upon reaching Earth.
The panel deemed it important to develop new RDSP technologies for various reasons. First, the search for past or present evidence of life off of Earth is a fundamental goal of NASA exploration. Analyses of surface samples from any planetary body are of great scientific interest, and future RDSP research and development will continue to produce more capable surface and near-surface samplers. But with respect to the search for life, targeting surface samples would likely only lead to a limit on the science yield. Analyses of subsurface rock and regolith samples from planetary bodies will provide planetary science with a high-quality gateway to the climate history of the target body and locations on the body that may be or might have been conducive to life. Direct life detection is likely to require instrument analysis of subsurface regions where water is found in the liquid phase. To support these searches, new RDSP technologies and systems would need to access, acquire, and process pristine and unaltered subsurface samples, as well as samples associated with liquid water from below the surface. These RDSP technology developments (including technology elements developed to achieve reliable forward and back planetary protection for sample return missions) scored very high in the panel valuations because, in part, no other agency is believed to be working on these technologies. Due to extreme mass and power constraints associated with planetary missions, there is also little or no technology transfer to be had from the power- and mass-rich terrestrial commercial drilling technology base. In addition, planetary drilling and sample processing systems possess a very high degree of autonomy that is not necessary for terrestrial drilling. RDSP is a singular technology set required to realize a critical NASA goal. Support for a very robust RDSP technology development program scored high because such a technology development push corresponds directly to one of the NASA strategic goals (exploring the origins and fate of life in the universe).
Beginning in the 1960s and continuing up to the present, surface oriented robotic sampling, shallow drilling, and sample preservation systems have achieved TRL 9. Many of these are well known, such as the Soviet Luna drills or the Mars Exploration Rover Rock Abrasion Tools. Recent systems include a shallow-drilling solid rotary drill integrated into the Mars Science Laboratory (Curiosity), which can deliver drill cuttings to instrumentation. RDSP systems supporting future explorations capable of penetrating deeper into a wide range of targets and capable also of acquiring unaltered cores for processing (or systems that transport instrumentation down the hole) are only at the TRL 2-5 range. With earlier basic sampling systems already developed to a high TRL and recent RDSP R&D producing limited but steady progress, the risk of developing the RDSP systems for future, more ambitious missions is perceived as moderate. Going deeper with subsurface robotic systems and aiming for ever higher quality samples and processing and protecting those samples will mean a corresponding increase in RDSP R&D to cover this increasing scope of RDSP technologies necessary for future missions.
Future RDSP systems will benefit from field testing on Earth in remote terrains such as Antarctica to approximate target planetary conditions. To support unmanned and manned sampling missions and surface and subsurface operations at comets and asteroids, the use of experiments conducted at the ISS might prove valuable. The microgravity ISS environment could be employed to address many engineering unknowns associated with robotic drilling such as cutting chip behavior in a microgravity environment and unknowns associated with processing and manipulation of powdered or sliced samples in microgravity. Elements of the planetary protection transfer break scheme could be tested at the ISS as well.
RDSP technology is applicable to the continued exploration of Mars for in situ missions and for Mars Sample Return. RDSP technology developments will also benefit manned and unmanned missions to small bodies and the Moon, and RDSP will benefit missions to the surfaces of the rocky planets and the moons of the outer planets.
Technology 4.2.1, Extreme Terrain Mobility
Extreme mobility encompasses all ground or surface level mobility. This involves moving across horizontal surfaces while navigating over, around, or through obstacles, vertical surfaces, and all terrain soil types. Additionally, it includes roving (wheeled, tracked, and walking), crawling, horizontal hopping, slithering, swimming through sand, rolling, climbing, and tethering. This category applies to the ability of a ground vehicle to negotiate extremely challenging, unstructured terrain. This category assumes a nominal gravitational field; mobility in a microgravity field is handled in the section addressing technology 4.2.4 Small Body/Microgravity Mobility.
Extremely mobile platforms will be a critical component to both the success and diversity of extraterrestrial body exploration. In addition, higher degrees of mobility serve to complement autonomy. While it is not universally true to say that more mobility will negate any deficiencies in autonomy, it is fair to say that the more capable a platform is in terms of mobility, the better it will perform across the spectrum of autonomy. The need for extremely mobile platforms is also evident in the terrain that will be traversed. Even structured obstacles such as stairs, walls, sewers, etc., can be challenging for vehicles designed specifically for those applications. However, in chaotic unstructured environments with random geometries and large variations on terrain composition, robotic platforms will be challenged more than ever to avoid getting stuck while still performing relevant and meaningful exploration.
The TRL for extreme mobility technologies covers a broad spectrum. Some of the vertical and liquid traversing technologies are at TRL 1 or 2, especially when considered for NASA applications. However, other ground and vertical surface traversing technologies vary from TRL 3 to 7 in terms of NASA mission applications. The DOD (the Army in particular) is investing heavily in this area. The Department of Energy and Department of Homeland Security are considering investments in this area given access mobility challenges resulting from recent worldwide disasters such as at the Fukushima power plant, and due to tornados and flooding in the United States. Therefore, NASA could benefit from partnering with other federal agencies in the development of extreme mobility technologies. While some of the environments for NASA’s extreme mobility applications are unique, the work currently being done outside of NASA does have direct relevance to NASA’s missions.
Development of this technology would not significantly benefit from access to the ISS. However, access to Moon/Mars surface base/exploration missions and access to Antarctic research sites and reduced-gravity flight test opportunities would significantly benefit the development of this technology.
This technology is game changing because it provides NASA with the capability to maneuver its surface vehicles in extreme terrain in order to “follow the water”— a high-priority science focus for Mars and lunar surface missions. The non-NASA aerospace needs received a low rating for this technology because industry does not do operations on the surface. Technical risk and reasonableness scored high because this technology category encompasses a wide range of specific-capability investment opportunities, some of which have applications scope and readiness levels very well suited to OCT investment. This technology area is applicable to any exploration mission, human or robotic, to a planetary (or moon) surface with appreciable gravity.
Technology 4.2.4, Small Body/Microgravity Mobility
Operating robots in microgravity poses many challenges. In particular, performing meaningful work in microgravity environments is difficult without fixturing or tethering to grounded structures. The small body/microgravity mobility area involves maneuvering on or above surface environments with very low gravitational forces. This includes walking or roving in microgravity and propulsive thrusting technologies. Examples include working near or on the surface of near-Earth asteroids or comets and all on-orbit EVA and IVA operations. Simple tasks such as turning a screw, drilling a hole, or pushing a button can be extreme challenges to mobile platforms that are not attached to other structures. For structured environments, work can often be performed by grasping parts of the structure to be worked on, such as grabbing a door handle and pushing off of the door frame. However, in unstructured environments (such as on the surface of an asteroid), it is often impractical or impossible to use this methodology to perform work. Therefore, adaptive mobility systems with complementary perception and autonomy are key to performing exploration and sample return missions in tight spaces and microgravity environments.
The TRL for microgravity mobility technologies ranges from 1 to 9. TRL 9 on-orbit operations include examples such as AERCam Sprint (EVA) and SPHERES (intra-vehicular activity). An example of a mission with high TRL was Japan Aerospace Exploration Agency (JAXA) Hayabusa spacecraft, which operated in the proximity of the asteroid Itokawa and successfully performed a sample acquisition operation. The JAXA Minerva asteroid rover was flown on the same Itokawa mission, but an error in deployment kept it from successfully landing on the surface. As a result there has only been a single attempt and no successful surface mobility operations on a small body. Surface mobility (as opposed to proximity operations) has had some technological prototypes such as the variable center of gravity (CG) technology implemented in Minerva and a hybrid momentum wheel. Variable or dynamic CG capabilities can greatly enhance the ability of platforms to move around and perform meaningful work by dynamically shifting the CG in conjunction with the motion of the vehicles. Techniques for operating on a surface with volatiles (e.g., comets) are only at preliminary conceptual stages. DOD and commercial satellite companies are the only other U.S. organizations that might have some interest in EVA operations (for the purposes of inspection and servicing/repair of orbital assets).
Development of this technology would significantly benefit from access to the ISS, especially with respect to EVA and IVA operations and testing. This technology is also well aligned with NASA’s goals related to the exploration of small bodies both robotic and with crew as demonstrated by recent selections (e.g., selection of OSIRIS-Rex), making this a critical technology for future missions.
The panel overrode the QFD score for this technology to designate it as a high-priority technology because the QFD scores did not capture the value of this technology in terms of its relevance with NASA priorities. In particular it is recommended as a high priority because the NASA 2010 Authorization Act (P.L. 111-267) has indicated that small body missions (to near-Earth asteroids) should be an objective for NASA human spaceflight beyond Earth orbit. If this goal is pursued as a high NASA priority, it would likely also require precursor robotic missions to small body surfaces with applicable mobility capability. This item’s overall score was low because the nature of development and testing of microgravity systems is expensive and it has little relevance to the non-aerospace community.
MEDIUM- AND LOW-PRIORITY TECHNOLOGIES
TA04 includes 30 level 3 technologies that ranked low or medium priority. This includes a substantial number of technologies that were added to the TABS in an attempt to align the TA04 TABS with that of the other 13 roadmaps.
In this roadmap, two technologies (4.3.5 Collaborative Manipulation and 4.3.4 Mobile Manipulation) were assessed to be medium priority because of limited alignment with NASA mission areas. While several potential missions (e.g., planetary missions with multiple robotic surface vehicles, on-orbit servicing and/or assembly) were identified, the technologies were not broadly applicable to multiple missions in multiple NASA mission areas.
Seven other medium-priority technologies were judged to provide major improvements in mission performance, but were assessed to have a lower risk level than is usually appropriate for NASA OCT technology investments. These technologies included 4.7.3 Onboard Computing, 4.5.3 Autonomous Guidance and Control, 4.1.1 Vision, 4.7.1 Modularity/Commonality, 4.6.1 Relative Navigation Sensors, 4.1.4 Localization and Mapping, and 4.1.2 Tactile
Sensing. For most of these technologies, the development risk is low because the underlying technology is well understood, and a gradual development program focused on advances in these areas could be formulated, tested, and applied incrementally. 4.7.3 Onboard Computing received a somewhat lower score because so many other agencies and commercial entities are working on it that NASA’s contribution would be relatively small.
The remaining 11 medium-priority technologies and one low-priority technology were also judged to provide major improvements in mission performance with broad applicability to multiple NASA missions, but development cost and cost risk were a concern. These technologies included 4.1.6 Multi-Sensor Data Fusion, 4.7.2 V&V of Complex Adaptive Systems; 4.5.5 Adjustable Autonomy; 4.4.7 Safety, Trust, and Interfacing of Robotic/Human Proximity Operations; 4.5.2 Dynamic Planning and Sequencing Tools; 4.4.1 Multi-Modal Human Systems Interaction; 4.4.5 Distributed Collaboration; 4.5.4 Multi-Agent Coordination; 4.5.6 Terrain Relative Navigation; 4.2.3 Above-Surface Mobility; 4.1.8 Terrain Classification and Characterization; and 4.2.2 Below-Surface Mobility. Despite the potential for significant benefits, these technologies were assessed to have a high probability of encountering pitfalls which could complicate the effort and cause additional development problems, possibly leading to significant cost growth and schedule delays.
The final nine low-priority technologies were judged to have minor benefits to NASA missions within the next 20 to 30 years. These technologies included 4.4.6 Common Human-Systems Interfaces, 4.3.1 Robot Arms, 4.3.3 Modeling of Contact Dynamics, 4.1.5 Pose Estimation, 4.5.7 Path and Motion Planning w/Uncertainty, 4.1.3 Natural Feature Image Recognition, 4.1.7 Mobile Feature Tracking and Discrimination, 4.4.3 Robot-to-Suit Interfaces, and 4.4.4 Intent Recognition and Reaction. Each of these technologies fall into at least one of three categories: (1) technologies that are fairly mature with limited room for additional improvements (e.g., 4.1.5 Pose Estimation); (2) technologies where even substantial improvements in component or subsystem technology will not easily translate into order-of-magnitude improvements in mission performance or mission risk (e.g., 4.5.7 Path and Motion Planning with Uncertainty); or (3) technologies still lack proven applicability of their underlying principles (e.g., 4.4.6 Common Human-Systems Interfaces).
The panel noted technologies where investment from organizations outside NASA would overshadow any potential NASA investments. When this is the case, NASA’s limited funds could be better spent on areas where DOD, international space agencies, or commercial industry are not making substantial financial contributions. This impacts technologies such as 4.7.3 Onboard Computing, 4.4.4 Intent Recognition and Reaction, and 4.1.1 Vision. NASA’s key work in these areas could focus on adapting advances made by other organizations to the specific requirements of NASA missions.
PUBLIC WORKSHOP SUMMARY
The workshop for the Robotics, Tele-Robotics, and Autonomous Systems technology area was conducted by the Robotics, Communications, and Navigation Panel on March 30, 2011, at the Keck Center of the National Academies, Washington, D.C. The discussion was led by panel chair Stephen Gorevan. He started the day by giving a general overview of the roadmaps and the NRC’s task to evaluate them. He also provided some direction for what topics the invited speakers should cover in their presentations. After this introduction, the day started with an overview of the NASA roadmap by the NASA authors, followed by several sessions addressing the key areas of the roadmap. For each of these sessions, experts from industry, academia, and/or government were invited to provide a 30 to 45 minute presentation/discussion of their comments on the NASA roadmap. At the end of the day, there was approximately 1 hour for open discussion by the workshop attendees, followed by a concluding discussion by the panel chair summarizing the key points observed during the day’s discussion.
Roadmap Overview by NASA
The presentation by the NASA roadmap development team described the seven level 2 subareas within TA04, including examples of past and current missions, previous technology development programs, and future applications for each technology subarea. These were described at a very high level, with little supporting information that described the level 3 technologies within each subarea. Key benefits of TA04 technologies were presented, but
were only described as benefits of the entire robotics, tele-robotics, and autonomy fields rather than benefits tied to specific level 3 technologies. The briefing included an unprioritized list of 12 top technical challenges, though the briefing did not describe a direct one-to-one mapping between the challenges and the level 3 technologies, and did not focus the challenges on NASA-specific problems. The briefing also described a specific future mission manifest, and tried to identify technology push versus mission pull assessments against the mission manifest.
The panel described its struggle to evaluate technologies in TA04 whose endpoints were not defined in the roadmap. Without defining endpoints of a specific technology development, it is challenging to evaluate whether improvements in that technology will be sufficient to enable game-changing capabilities or fundamentally new types of missions. For example, mobility requirements are very different for long-distance traverses on a planetary body with substantial gravity than they are on small asteroids. Without a prioritized mission set, it will be hard to rank these challenges against each other. This was especially challenging because NASA had not provided a set of reference missions (consistent with NASA’s current priorities and also consistent across all Tas) that could be used to filter these technologies, and the endpoints associated with different missions are very different. NASA stated that it recognized this was an issue during roadmap development, but each roadmap team was ultimately responsible for developing its own mission list.
Briefing 1: Satellite Servicing
David Kang (ATK Aerospace Systems) provided a presentation that evaluated the roadmap in terms of its applicability to in-space satellite servicing missions. Kang stated that on-orbit servicing is a game-changing capability that is very near a tipping point, but development of this capability requires a combination of technical advances (and good systems engineering/integration of less advanced technology) that cannot be tied to a specific level 3 technology. He also stated that satellite servicing offers a method to evaluate the utility of technology against a specific mission, by examining money spent on technology versus money earned from new capabilities (e.g., costs of communication and ground staff versus cost to develop and test onboard autonomy). Commercial servicing must have a business case that closes, so these types of trades are critically important; NASA may not have to make the same type of business case trades for high-priority assets.
Overall, Kang felt that the roadmap had a very good list of key technologies at a high level. He felt there was a need for additional specification for each technology, but this would require mission-oriented applications that define the specific performance level that is required. This is more challenging for TA04 than for any of the other 13 roadmaps, because TA04 deals with autonomy and robotic systems (e.g., the entire spacecraft system).
Discussion comments indicated that a primary impediment to on-orbit servicing may be the high cost of access to space, rather than the specific servicing technologies. When coupled with large fuel requirements for plane change maneuvers, servicing has only looked cost-effective for clusters of satellites in the same orbital plane. Kang recognized this as an issue, but felt that his organization has enough interest from commercial satellite operators in GEO to make a business case close.
Briefing 2: Orbital Debris Removal and Proximity Operations
Wade Pulliam (Logos Technology) presented observations that he generated along with other colleagues who have expertise in orbital debris or related technologies. He provided an overview of the current debris environment in LEO and GEO, projections of future debris environments, and operations concepts for large-scale debris removal. This presentation was relevant because techniques for capturing orbital debris have a similar technology set and requirements list as satellite servicing, with additional complications because the debris is non-cooperative with few things to hold on to. It is more analogous to landing on a small asteroid, including the need for characterization of the state of the target and potential grappling locations when the servicer arrives.
Pulliam described the utility of dexterous robotics for grappling a free-flying object, but also stated that harpoons with tethers rated highly for capturing inert debris objects. Orbital debris removal would also benefit from sensor fusion technologies (especially techniques for combining electro-optical /infrared imaging with LIDAR sensor data) and autonomous anomaly handling.
Overall, Pulliam felt that the roadmap was in pretty good shape, except that it did not sufficiently address grappling of non-man-made or non-intact objects. Pulliam noted that a significant difficulty is stopping and grappling non-cooperative rotating objects, and that technology development to achieve this capability. The NASA authors identified the section where these are briefly mentioned. In addition, Pulliam stated that advances should be tied to a mission and its needs, not included in a technology program for the technology’s sake (i.e., let the mission requirements define which parts of the roadmap should take precedence).
During the discussion section, the panel raised the issue of potential roadblocks related to international policy and legal issues. Pulliam stated that 80 percent of the value in LEO is from the United States, and 80 percent of the debris is from Russian upper stages, leading to speculation that much of the risk could be reduced with a bipolar agreement between the United States and Russia.
Briefing 3: Mobility
William “Red” Whittaker (Carnegie Mellon University) followed with a presentation about future science missions that may look to explore “lava tubes” on planetary surfaces— enclosed subsurface areas that scientists have identified as a high priority for exploration. Mobility within these features drives requirements for autonomy (due to denial of line-of-sight communication links), mobility and access, power generation and storage, perception, modeling, and mobility modalities for extreme terrain.
Whittaker believes that future interplanetary missions with mobility should emphasize technologies for long-range traverses over technologies for precision landing. For investigations looking for volatiles, the descent and landing process will substantially impact the environment and prevent an authentic exploration of a pristine area. With traverse technologies, the lander/rover can move to the desired area and perform science without concerns about contamination.
The speaker stated that processing is no longer a constraint to robotic mobility, and sensing is getting very fast. The panel commented that this was truer for terrestrial robotics than for space missions due to the lag between terrestrial and radiation-hardened processors. Advancements in space-qualified processors will be required to close this gap.
Briefing 4: Planetary Surface Robotics
Edward Tunstel (Johns Hopkins University Applied Physics Laboratory) provided an assessment of the TA04 roadmap from a planetary surface robotics perspective. He stated that the roadmap has the same type of technologies as previous roadmaps because the technology had not progressed rapidly; the only change appeared to be the “landmark” missions that the roadmap focuses on. Tunstel stated that there were no glaring omissions in the technology list, but suggested that the roadmap should include more items that offer functional longevity for longer-duration (planetary surface robotic) missions.
Tunstel felt that there was not enough emphasis on software in the technology list, but the panel responded that there may not be enough emphasis on hardware. During discussions, it became apparent that the speaker was addressing his comments to NASA’s original work breakdown structure, but between the kickoff and the workshop the panel had already made substantial alterations that addressed his original concern.
Tunstel identified two potential technology gaps: proprioception (both for robustly stable performance on challenging terrain and for manipulation) and low-risk learning/adaptation (i.e., learning by demonstration, maximizing functional capability in the face of degraded subsystems). Tunstel also prioritized the technologies from a planetary surface perspective, listing (1) mobility and manipulation for Mars Sample Return sample caching robotics; (2) multi-arm dexterous telerobotics (including immersive telepresence, haptics, and operation over delay-tolerant networks); (3) access to small body surfaces; (4) access to planetary subsurfaces; and (5) low-risk learning and adaptation.
Tunstel stated that the “open source” software community may have a lot to offer in this technology area, provided that the issues with ITAR sensitivity of flight code can be solved. The panel described a positive recent
experience with SourceForge for a ground-based project, providing optimism that there are technical workarounds to these types of issues.
Briefing 5: Autonomous Rendezvous and Docking
Pierro Miotto (Draper Laboratory) focused his briefing on the Autonomous Rendezvous and Docking (AR&D) subarea, describing past missions that demonstrated manual and autonomous rendezvous and docking in space. Previous efforts in this area have been specialized for each application, with very little reuse or lessons learned. To prevent these mistakes in the future, Miotto argued that next-generation systems must emphasize common standards, open architectures, and non-proprietary solutions.
Miotto split the AR&D subarea into five categories: AR&D analysis, design, and test; autonomous GN&C; autonomous mission management; sensors; and mechanisms. Within the context of a spiral development process, he defined technology requirements and goals for early and future spirals for each of the five categories. He also described the importance of adequate trade space analysis for future AR&D missions, including ensuring that reliability, lighting constraints, and operational concepts do not overly constrain the technology space to require only the state of the art. As a result, he recommended that NASA explore development and demonstration of a range of AR&D technologies at different performance levels. He also recommended that NASA provide access for in-flight testing of systems developed independently of NASA, which would help promote an open architecture for commercial and noncommercial entities. Ideally, this would include creation of a dedicated AR&D facility to perform these kinds of tests in a closed-loop environment.
Briefing 6: Robotics
David Akin (University of Maryland) presented a top-level taxonomy of space robotics and described the current state of the art for mobility versus manipulation and microgravity versus planetary surfaces. He described a lower-level taxonomy of function-based manipulative robotics, and outlined key technology issues for mobility and for manipulation technologies. Each of these applications and technologies drives the required complexity, which can run the gamut from dexterous manipulation to simple actuation.
Akin also described future applications that include niches for a wide variety of space robots, each of which performs varied tasks at high efficiency. He does not see a need for a single generalist robot that can perform any task, but that robotics can be developed to support a variety of these niche roles.
Public Comment and Discussion Session
The following are views expressed during the public comment and discussion session by either presenters, members of the panel, or others in attendance.
• Roadmap level of detail. Several participants stated that the roadmap covers a lot of ground with a very wide set of topics, which corresponds to a very high-level treatment of individual technologies. As a result, the technical challenges are also at a high level and not very focused. They recommended looking at different solutions that attempt to solve a specific problem (e.g., image/pattern recognition technologies for docking versus planetary exploration), rather than trying to solve this in general.
• Linkage between missions and technology developments. It was suggested that NASA was more capability-driven than goal-driven when developing TA04. As a result, it can be challenging to see how the priorities for technology development were derived, given the vast list of technologies and the poor linkage between specific technology levels and the missions that require them.
• Autonomy versus automation. Some attendees recommended that autonomy (cognition) be considered separately from automation (i.e., following if/then/else trees). Many of the roadmap technologies that discuss autonomy are really describing more complex automation. The NASA roadmap developers countered that it is hard to imagine a credible mission in the next 20 to 30 years that would require high
levels of autonomy, as mission controllers would prefer to wait a few hours to troubleshoot a potential issue rather than spend the money to develop on-board autonomy and avoid that delay. Entry, descent, and landing (EDL) applications may drive this technology pull because of the short timeframe available to make decisions.
• Risk of autonomy. During the autonomy discussion, some participants viewed autonomy as a risk to the program, because the spacecraft may take an action that puts the hardware at risk. They mentioned that NASA may be hesitant to use high levels of autonomy because of the high cost of mission and the high visibility of failure. Other participants viewed autonomy as a way to protect those assets and to speed up the sense-understand-decide-act loop by removing information transport delays and ground operators from the loop. This was a fundamental disconnect about the role of technology in future missions. Additional autonomy can be tested on existing vehicles during extended missions, where the program risk tolerance is higher.
• Technology pull from future missions. There was some discussion about how realistic the missions in the roadmap were. Many of the target missions may not be funded, and may not have high enough priority to become real. As a result, NASA should consider updating the roadmaps with a more realistic assessment of potential missions, so that a better rationale for market pull (versus technology push) can be identified.
• Synergy with DOD investments. A participant from the DOD encouraged NASA to participate in interagency technology development efforts. This could be a mechanism for NASA to communicate with their DOD counterparts and to identify high-TRL development items that NASA could productize to claim early successes for OCT.




















