
Appendix H
Prospective Robotics Technologies
This appendix describes robotics technologies and approaches being developed to contend with the issue of load carried by dismounted Soldiers and to extend operational capabilities of the tactical small unit (TSU). The state-of-the-art technology readiness level (TRL) is provided for each of the advanced system examples.
WHEELED ROBOTIC SOLUTIONS
Wheeled robotic solutions are robotic systems that mimic the off-loading function served by mules and donkeys around the time of World War I.
Example 1
The Future Combat Systems Multifunction Utility/Logistics and Equipment vehicle is a 3.5 ton, six-wheel vehicle built by Lockheed Martin; it can be reconfigured from a logistics carrier to an automated weapons platform. It is teleoperated with limited autonomy, such as leader/follower or following electronic breadcrumbs. It is capable of operation in difficult terrain. The development was at TRL state-of-the-art 6 when the program was canceled in 2010 due to disappointing field trials and high projected cost.
Example 2
The Israel Aerospace Industries’ REX is similar in size and function to the Future Combat Systems Multifunction Utility/Logistics and Equipment. A small version of the REX is a four-wheel all-terrain vehicle weighing approximately 350 lbs. and carrying 500-lb payload. The unit can be configured for a number of missions and has leader/follower capability. It follows Soldiers using electronic breadcrumbs, can understand hand signals and avoid obstacles, and it exhibits multisensory position determination. The small REX has a sixty-mile range on a single tank of fuel and is currently being actively marketed for applications at the
Soldier level. Its development potential is TRL 7 in the mid term and TRL 9 in the far term with full autonomy.
BIPEDAL ROBOTIC SOLUTIONS
Bipedal robotic solutions include exoskeletons and anthropomorphic robotics for load-bearing, enhanced-lifting, and increased-endurance, and a stand-alone bipedal robot.
Example 1
With funding from the Defense Advanced Research Projects Agency (DARPA), both Lockheed Martin, and Raytheon developed exoskeleton systems that use imbedded computers and sensors to determine what the wearer wants to do and moves the powered elements accordingly. Units are battery powered and transfer load and weight of system to ground through lightweight, high-strength lower limb elements. Both have been shown to augment many human functions such as walking/running, squats, crawling, upper body lifting.
Both are undergoing further development to improve energy efficiency and evaluate their effect on human performance and user acceptance. Development potential at present is TRL 5, advancing to TRL 6 in the mid term and TRL 9 in the far term with other planned robotic functions including navigation, mission planning, and heavy lifting in field. First implementation is likely to be in rear/depot areas where moving of heavy objects is prevalent and energy supply less critical.
Example 2
The Hybrid Assistive Limb® (HAL) exoskeleton was developed by the Japanese company Cyberdyne. HAL is a cyborg-type robotic exoskeleton that has been developed mostly for the medical market. It is controlled by reading bioelectric signals on the human limbs that tell the muscles what to do and when to do it. This signal is fed to a computer that autonomously directs the exoskeleton to carry out the desired function. It is promoted as providing a more than two-fold enhancement of the human potential for activity. It is battery powered and specified to operate for more than 2 hours on a single charge.
Status: Currently available commercially in limited quantities. Available in lower limb and full-body cyborg-like configuration. TRL is 6-7 overall.
Development Potential: Commercial units not designed for military applications. Development potential excellent.
Example 3
Boston Dynamics and Honda are both experimenting with full anthropomorphic bipedal robots. Figure H-1 shows the Boston Dynamics robot in its current stage of development without any external shell.
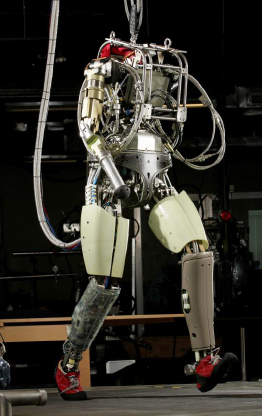
FIGURE H-1 Protection Ensemble Test Mannequin (PETMAN) robot without external shell. SOURCE: Re-printed courtesy of Boston Dynamics.
It is designed to function with most of the mobility of humans. The robot, called Protection Ensemble Test Mannequin (PETMAN), is being developed with Army support for testing clothing in a biological and chemical warfare environment. The robot is capable of walking, crawling, doing calisthenics, and most general human mobility functions. It is hydraulically actuated and has shock absorber elements in its legs. Control algorithms for the PETMAN are derived from the Boston Dynamics series of quadruped robots described below.
Status: TRL 5 proof of principle laboratory robots are under development and testing.
Developmental Potential: Excellent. Mid term TRL 6 with expanded applications. Fully functional anthropomorphic autonomous robots are anticipated for the far term.
Example 4
The Japanese robot Advanced Step in Innovative Mobility (ASIMO), is a bipedal anthropomorphic robot by Honda. ASIMO is in a sense a test-bed machine for developing and improving the autonomous behavior of an anthropomorphic robot. It looks somewhat like a human and performs like an intelligent entity. In the latest version, ASIMO is claimed to have advanced from a rule-based automatic machine to an autonomous “machine” able to function in a social environment and make decisions in the context of its surroundings.
According to the Honda Web site,
The following three factors were identified as necessary for a robot to perform as an autonomous machine, and the technologies required to realize these capabilities were developed: 1) high-level postural balancing capability which enables the robot to maintain its posture by putting out its leg in an instant, (2) external recognition capability which enables the robot to integrate information, such as movements of people around it, from multiple sensors and estimate the changes that are taking place, and (3) the capability to generate autonomous behavior which enables the robot to make predictions from gathered information and autonomously determine the next behavior without being controlled by an operator.
ASIMO is 1.3 meters tall, weighs 48 kg, and exhibits 57 degrees of freedom. It has demonstrated its ability to do the following:
• Establish a “world view” and perform within it through multisensory inputs and artificial intelligence programming.
• Ascribe intent to the movement and people and predict future configurations.
• Recognize multiple faces and voices simultaneously and change behavior within context.
• Predict trajectories and plan intercept path with subsequent voice engagement.
• Walk, run (9 km/hr), run backward, hop on one or two legs, and traverse uneven terrain.
• Tactile sensing for preforming delicate tasks.
Status: Highly developed and fully functional test bed for autonomous behavior in robotic systems. TRL of 6-7.
Development Potential: Excellent. In the far term, robotic systems based on ASIMO technology could produce humanoid robots for military applications.
QUADRAPED ROBOTIC SOLUTIONS
Quadraped robotic solutions are the robotic equivalent of donkeys or mules as pack animals. When fully developed quadruped robotic systems should have more mobility than wheeled or tracked vehicles. While several “legged systems” are being developed, the two described below are the most advanced. Examples include:
Example 1
BigDog is an advanced quadraped robot built by Boston Dynamics under contract to DARPA (Figure H-2). It has demonstrated the ability to traverse difficult terrain and can walk, run, and climb steep slopes while carrying respectable loads. BigDog’s power source is a gasoline- powered small engine that drives a hydraulic system to actuate all of its mobility functions. The legs of the robot are compliant and can recover some of the energy normally expended in the shock and bending associated with walking/running. BigDog is about the size of a small donkey, about 3 ft long, 2.5 ft tall, and weighing 240 lbs. BigDog has an onboard computer that contains a sophisticated control system to actuate all mobility functions, health monitoring, and advanced sensing and position location functions. In its current embodiments, it is teleoperated.

FIGURE H-2 BigDog. SOURCE: Re-printed courtesy of Boston Dynamics.
Boston Dynamics claims that BigDog has demonstrated the following:
• Running at 4 mph,
• Climbing slopes of up to 35 degrees,
• Traversing rubble-strewn terrain,
• Mobility in rain, mud and snow, and
• Ability to carry a 340-lb load.
Current Status: Currently TRL 6 in this embodiment as a technology demonstrator.
Development Status: Focus has shifted to larger sizes in the next example described.
Example 2
The Legged Squad Support System (LS3) is a scaled-up version of BigDog with bigger payloads and more capability. See Figure H-3.

FIGURE H-3 LS3, Legged Squad Support System. SOURCE: Re-printed courtesy of Boston Dynamics.
LS3 is in the early stages of development with DARPA funding and is advertised as far more capable and having greater range, reduced acoustic signature, and the ability to operate in a follower mode with troops.
Current Status: TRL 5-6. First items are being evaluated by DARPA.
AUTONOMOUS SYSTEMS
Teleoperated robotic systems are in widespread use by Soldiers, but these require constant human control to operate, which can degrade the performance of small units in combat. Beyond teleoperation, numerous experimental robotic systems have been built to demonstrate specific aspects of advanced robotic functions such as autonomous navigation over extended distances, a rudimentary world view and operation within that view, anthropomorphic bipedal mobility, quadruped mobility, merging of human and robot through a powered exoskeleton, and human-robot interaction. All are promising but none have been developed to the point of practicality the context of military applications.
The cutting edge for robotics is a fully autonomous system and all it implies: Perception, world view, human-robotic interaction, and the rest are equally important for robotics to mature to its full potential. There have been many instances where robotics seem to exhibit autonomy in scripted and highly supervised scenarios. To date, however, there has not been an instance of a learning robotic entity, perhaps confined to a military base initially, that is allowed to roam freely, mingling with humans and human-driven machines, while performing assigned duties, as would be required to demonstrate full autonomy. The most impressive demonstrations of reasonable autonomy from the perspective of the military have been the DARPA challenges where robotic systems traversed long distances over varied terrain given only a starting point and an end point.1
Building on the DARPA grand challenges success, Google has started a major initiative in advanced robotics and to date has logged over 140,000 miles in a robotic vehicle with impressive results. Google usually allows autonomous operations on roads that have been traversed by a research team to develop data from which to generate a “world view” of the intended route. In addition, Google uses cloud computing to give the vehicle the advantage of a much larger computational capability than could be housed in the vehicle itself. Even so, the results are impressive and represent a step toward autonomy on a par with the far more modest technology displayed by ASIMO described above.
Large Unmanned Air Vehicles
Large unmanned aerial vehicles (UAVs) are used to support Soldiers and squads by providing for reconnaissance and intelligence and, in the future, for delivery of lethal agents. For maximum utility, the overhead asset could be tasked by a Soldier or squad leader to observe a forward area and deliver data and/or photo images directly and in real time. If a critical threat exists, the UAV could deliver a weapon to take out the threat. All of this capability exists today with the exception of the communications link and doctrine that would enable the Soldier to access and task the UAV.
A wide range of large UAVs in various stages of development and having loiter times in excess of 7 days are applicable to this capability (DoD, 2009). The most notorious of those in current service is the Predator, which was introduced in 1997 by the Air Force. Since that time, it has flown thousands of missions, including surveillance and weapons delivery missions, and is capable of flying at over 25,000 ft for over 20 hr. At such altitudes, these systems are less susceptible to the weather and environmental factors that prevail closer to the battlefields. In the far term, high resolution Synthetic Aperture Radar could give the high-altitude UAV all-weather capability but with reduced resolution and fidelity of data. The systems are teleoperated from remote locations by trained pilots. Since communications and data transfer exist for these systems, the only remaining obstacles to tasking at the squad level are to put in place the necessary communications links and to make the UAV available for a specific mission set.
Current State of the Art: TRL 9 currently deployed in theater and by the U.S. Customs and Border Patrol
Small UAV and UGV Robots
Robots practical for use at the squad and individual Soldier levels are of two kinds: those that have to be carried by the Soldier and those that can keep up using their own motive power. At the Soldier level, robotic weight and size restrictions are tied to mission. For surveillance and reconnaissance several lightweight UAVs and UGVs (unmanned ground vehicles) that could be applied at the squad level are currently in the inventory or being evaluated in the field:
• UAV. Gas Micro Air Vehicle (GMAV) ducted fan, 16 lb, 3-lb payload, liquid fuel.
• UAV. Wasp III winged, 1 lb EO/IR sensor suite, battery.
• UAV. RQ-11 Raven winged, 4.2 lb, 11.2-oz payload, battery.
• UGV. Packbot, tracked, ~30 lb, 4-lb multifunctional payload, battery
• UGV. MARCbot, wheeled, ~25-lb multifunctional payload, battery
• UGV. Throwbot, wheeled, 12 oz, battery.
• UGV.Toughbot, wheeled, 2.1 lb, battery.
The GMAV ducted fan system is able not only to hover over a target but also to perch on top of buildings or other structures to provide persistent surveillance. The Throwbot and Toughbot UGVs are designed to be tossed into an area such as a building or enclosure to provide video surveillance of the area.
Small UAV and UGV systems can provide the Soldier with the ability to look beyond the next hill or into the next block of an urban environment, identify enemy positions, explore buildings and caves, and locate and examine potential improvised explosive devices. All of these tasks are dangerous and account for numerous casualties if done by Soldiers.










