
Mechanics, Materials, and Functionalities of Biointegrated Electronics
NANSHU LU
University of Texas at Austin.
Robust bioelectronic interfaces present unlimited potentials in wearable health monitors, implantable devices, and human-machine interfaces. But conventional high-performance electronics, which are based on planar and rigid silicon wafers, are intrinsically incompatible with curvilinear and deformable natural organisms. This challenge is being approached with a mechanics-based strategy involving the use of neutral planes and filamentary serpentine networks. The resulting structural-electrical design has enabled flexible and stretchable electronics to conform to—and deform with—biological tissues for physiological sensing, programmable stimulation, and on-demand therapeutics. This article summarizes the mechanics, materials, and functionalities of such biointegrated electronics and concludes with a discussion of future directions.
BACKGROUND
Research on flexible electronics started nearly two decades ago (Bao et al. 1997; Garnier et al. 1994) with the demand for macroelectronics (i.e., large-area electronics), such as paperlike flexible displays (Rogers et al. 2001). Early research focused on organic semiconductors and conducting polymers because their intrinsic deformability, light weight, and low manufacturing cost are appealing for large-area flexible electronics, especially when merged with roll-to-roll processes (Forrest 2004). Methods to synthesize, pattern, and passivate organic electronic materials (Forrest and Thompson 2007; Menard et al. 2007) were then developed and applied to the manufacture of devices such as organic solar cells (Kaltenbrunner et al. 2012; Lipomi et al. 2011) and artificial electronic skins for robotics (Mannsfeld et al. 2010; Someya et al. 2004; Takei et al. 2010), and
flexible displays based on organic light-emitting diodes are nearing commercial reality.1
But the chemical instability of organic semiconductors and difficulties associated with low electronic performance have somewhat limited their application in high-speed, low-power, or long-lasting electronics. In contrast, inorganic semiconductors exhibit high carrier mobility and on-off ratio as well as excellent chemical stability in ambient environments (Service 2006). Furthermore, the material and electronic properties of inorganic semiconductors and metals have been well defined and the manufacturing processes well established after more than 100 years of research and applications. Thus flexible electronics based on rigid but high-quality monocrystalline inorganic semiconductors started to emerge in the mid-2000s (Khang et al. 2006).
To overcome the rigidity of inorganic electronic materials, thin film mechanics has been applied to enhance the deformability of polymer-bonded metallic and ceramic membranes.
MECHANICS: BENDABILITY AND STRETCHABILITY OF INORGANIC ELECTRONIC MATERIALS
Inorganic materials such as silicon and metals are stiff and readily rupture or yield when their intrinsic strain exceeds even very small values, such as 1 percent. But the mechanical limit of a structure can be offset by the geometry of the construction even for intrinsically fragile materials.
Basic beam theory predicts that the bending-induced maximum strain of a membrane is proportional to the product of film thickness and bending curvature. If the maximum strain is limited to a critical strain to rupture of the material (e.g., 1 percent), then the maximum allowable bending curvature will be inversely proportional to the thickness of the silicon plate/membrane, as shown in the log-log plot of Figure 1. As the membrane thickness decreases from millimeters to tens of nanometers, the attainable bending curvature can be enhanced by five orders of magnitude. As a result, although bulk silicon wafers are rigid plates, silicon nanomembranes (with a thickness of ~100 nm) can be readily arched to the radius of a folded paper (~0.1 mm) without rupture, as shown in Figure 1C.
Building on this unprecedented bendability, silicon nanomembranes can be made stretchable by applying two prevailing design strategies. One strategy calls for bonding flat nanoribbons to a prestretched elastomeric substrate to produce wrinkled nanoribbons (represented in Figure 2A) (Khang et al. 2006; Kim et al. 2008a; Sun et al. 2006). When the prestretch is released, the elastomeric substrate fully retracts, inducing out-of-plane sinusoidal buckling in the nanoribbons in a mechanism similar to the Euler buckling of an elastic rod under axial compres-
__________________
1 As evidenced in a promotional Samsung video, www.youtube.com/watch?v=N3E7fUynrZU, presented at the International Consumer Electronics Show (CES), January 8-11, 2013.
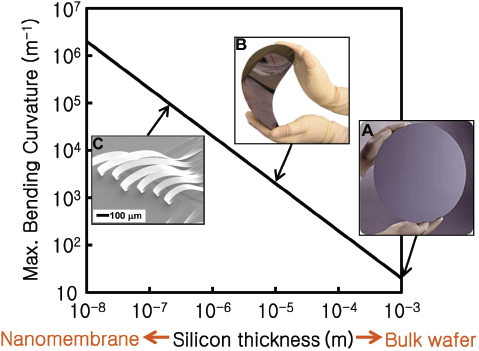
FIGURE 1 Maximum allowable bending curvature is plotted as a function of silicon plate/membrane thickness, with insets showing the bendability of (A) a bulk silicon wafer, (B) a silicon thin film, and (C) silicon nanoribbons. Reprinted from Kim et al. (2012a) with permission from Nature Publishing Group.
sion. Nanomembranes bonded to biaxially prestretched elastomeric substrates form two-dimensional wrinkled patterns as shown in Figure 2B (Choi et al. 2007). Buckling instabilities involving large displacement but small strains are the desired outcome in stretchable electronics.
With the other strategy, isolated rigid islands linked by buckled linear metallic ribbons (Figure 2C) can be stretched up to 40 percent without mechanical failure (Kim et al. 2008b; Ko et al. 2008; Lee et al. 2011). When serpentine ribbons (Figure 2D) are used instead of linear ribbons, stretchability of the system can vary from 10 percent to 300 percent depending on the serpentine tortuosity (Kim et al. 2011a,b; Xu et al. 2013).
Both wrinkling and serpentine strategies have proven effective in keeping strains in inorganic semiconducting or metallic materials below 1 percent when the polymer substrate is subjected to significant deformation (e.g., of orders of magnitude).
Furthermore, when substrate materials are too stiff to stretch but thin enough to bend (e.g., plastic sheets, paper, leather, fabric), electronics fabricated on the surface of such substrates have to survive tensile strains induced by bending
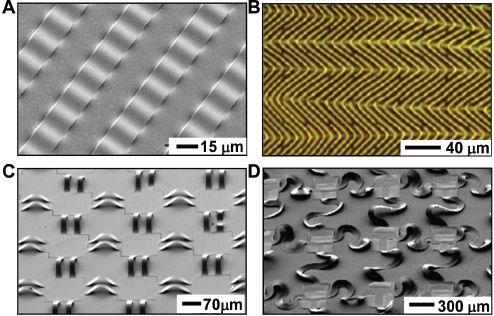
FIGURE 2 Design strategies of stretchable electronics enabled by the mechanics of film-substrate interaction. (A) Silicon nanoribbons buckled on uniaxially prestretched soft elastomer. Reprinted from Khang et al. (2006) with permission from the American Association for the Advancement of Science. (B) Silicon nanomembrane buckled on biaxially prestretched soft elastomer. Reprinted from Choi et al. (2007) with permission from the American Chemical Society. (C) Isolated device islands interconnected by popped-up linear metallic ribbons. Reprinted from Kim et al. (2012b) with permission from the Materials Research Society. (D) Isolated device islands interconnected by serpentine-shaped metallic ribbons. Reprinted from Kim et al. (2008b) with permission from the National Academy of Sciences.
curvatures. A thin compliant layer laminated between the substrate and the active device islands has been found to greatly reduce tensile strain in the islands through large shear deformation (Sun et al. 2009). Such a strain isolation mechanism has enabled bendable and even foldable electronics on a lot of unconventional substrates, such as printing papers, fabrics, and aluminum foils (Kim et al. 2009).
Exciting discoveries such as these offer ways to overcome the intrinsic brittleness and stiffness of inorganic semiconductors and open the door for their applications in flexible and stretchable electronics.
MATERIALS PROCESSING: MICROTRANSFER PRINTING
Microtransfer printing technology developed for single crystal inorganic semiconductors (Kim et al. 2010c; Meitl et al. 2006; Yoon et al. 2010) has enabled
the integration of high-performance electronics on deformable substrates such as flexible displays (Park et al. 2009), high-efficiency flexible solar cells (Yoon et al. 2008, 2010), bioinspired electronic eye cameras (Ko et al. 2008; Song et al. 2013), and biointegrated electronics (Kim et al. 2012a,c,d).
Figure 3 illustrates the generalized two-step microtransfer printing method. The fabrication begins with the high-temperature process of doping silicon nanomembranes on silicon-on-insulator (SOI) wafers. Preprocessed monocrystalline silicon nanomembranes are then released from the SOI wafer and printed onto the polyimide (PI)-coated rigid handle wafer using elastomeric stamps; the precoated PI layer serves as a support and encapsulation layer for the functional metal and semiconducting nanomembranes. Conventional microfabrication processes (e.g., low-temperature sputter or electron beam deposition, photolithography, and wet or dry etching) can then be readily performed on the PI-coated wafer. The circuit is eventually patterned into stretchable open mesh networks and transfer printed from the wafer onto a wide variety of deformable substrates, again using elastomeric stamps to render a fully functional flexible/stretchable system.
Because high-quality monocrystalline silicon is used as the semiconductor and low-resistance gold wires are used as the conductor in these devices, their electronic performance and long-term chemical reliability are on par with wafer-based electronics while high flexibility and/or stretchability is incorporated through the structural design. Similar fabrication strategies are applicable to the fabrication of stretchable AlInGaP2 optoelectronics (Kim et al. 2010b) and gallium arsenide (GaAs) photovoltaics (Lee et al. 2011).
FUNCTIONALITIES
Epidermal and in Vivo Sensing
With the maturity of the enabling technology for microtransfer printing, flexible and stretchable electronics found their exemplary applications in the late 2000s with the emergence of biointegrated electronics, a field that has greatly facilitated epidermal and in vivo sensing (Rogers et al. 2010).
For epidermal sensing, physiological electrodes are mounted on the skin (via adhesive tape, mechanical straps, or needles) with terminal connections to separate boxes that house collections of rigid circuit boards, power supplies, and communication components (Gerdle et al. 1999; Webster 2009). These systems have many important capabilities, but they are poorly suited for practical application outside of research labs or clinical settings.
The development of novel electronic systems with matching form factors and the mechanical properties of biotissues is essential for long-term, intimate bioelectronic interfaces. To that end, the application of serpentine structural
__________________
2 Aluminum gallium indium phosphide.
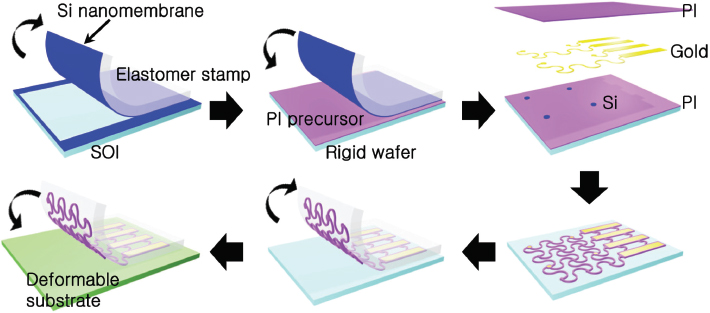
FIGURE 3 Schematics of the fabrication procedures of stretchable electronics: transfer doped silicon (Si) nanomembranes from silicon-on-insulator (SOI) wafers onto polyimide (Pl)-coated rigid handle wafer with an elastomer stamp. Silicon patterning and metallization are followed by PI encapsulation. Dry etching of PI defines the serpentine open mesh structure. Finally the well-fabricated stretchable circuit is transferred from rigid wafer to a deformable substrate.
designs and transfer-printing methods has enabled the development of ultrathin, ultrasoft electronics composed of high-performance inorganic materials. Such bio-integrated electronics have in turn led to exciting applications such as epidermal electronics for vital sign monitoring (Huang et al. 2012; Kim et al. 2011b; Yeo et al. 2013), brain-computer interfaces (Kim et al. 2010a; Viventi et al. 2011), electrocardiogram (ECG) mapping devices (Kim et al. 2012b; Viventi et al. 2010), and smart or minimally invasive surgical tools (Kim et al. 2011a, 2012e).
Figure 4 illustrates the use of biointegrated electronics for epidermal and in vivo physiological sensing. Electroencephalograph (EEG) measurements are
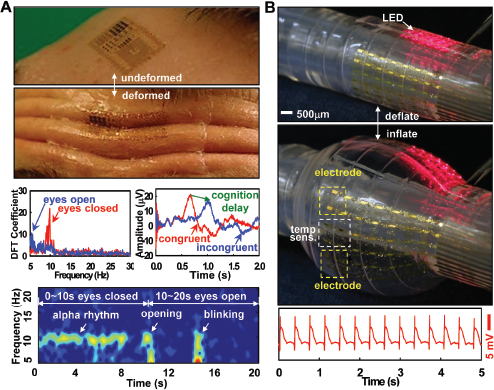
FIGURE 4 Biointegrated sensors based on stretchable electronics. (A) Ultrathin, ultrasoft epidermal electronic system laminated on a human forehead to read human electroencephalograph (EEG) (upper frames). Discrete Fourier transform coefficients of EEG alpha rhythms (middle left), demonstration of Stroop effects in EEG (middle right), and spectrogram of alpha rhythm (bottom). Reprinted from Kim et al. (2011b) with permission from the American Association for the Advancement of Science. (B) Multifunctional “instrumented” balloon catheter incorporating stretchable electrophysiological and radio frequency ablation electrodes, temperature sensors, pressure sensors, flow sensors, and arrays of microscale inorganic light-emitting diodes (μ-ILEDs) performing electrocardiogram recording of a rabbit heart. Reprinted from Kim et al. (2011a) with permission from Nature Publishing Group.
shown in Figure 4A, based on epidermal electronic systems laminated on a human forehead in a manner much like a temporary transfer tattoo, mechanically invisible to the wearer (Kim et al. 2011b). Because the attachment is enabled solely by van der Waals force without any conductive gels, these systems can function for more than two weeks at the exact same position without decomposition of the adhesives. Depending on where the electronic tattoo is placed, EEG, ECG, and EMG (electromyogram) measurements are possible with very high signal-to-noise ratio, thanks to the low impedance enabled by the intimate interface.
In addition to electrophysiological sensing, studies have successfully demonstrated the monitoring of skin temperature, mechanical deformation (strain), and hydration (Huang et al. 2012; Kim et al. 2011b; Yeo et al. 2013). Wireless power and data transmission coils as well as a stretchable battery (Xu et al. 2013) and stretchable memory patches (Son et al. 2013) further contribute to the standalone operation of wearable physiological sensors.
Soft electronics can integrate with not only human skin but also internal organs for in vivo monitoring. As an example, Figure 4B shows a multifunctional, “instrumented” balloon catheter that maintains a small initial diameter to travel through human veins and then inflates by 200 percent in cardiovascular cavities to perform minimally invasive surgeries such as the deployment of coronary stents. Electrodes and temperature, contact, and flow sensors integrated on the balloon skin provide in vivo endovascular and endocardial information, which used to be very difficult to obtain (Kim et al. 2011a).
Studies have also shown the effectiveness of other in vivo functionalities, such as epicardial ECG and beating amplitude sensing (Kim et al. 2012b; Viventi et al. 2010) as well as the mapping of brain activities (Kim et al. 2010a; Viventi et al. 2010, 2011).
Stimulation and Treatment
The most sophisticated version of biointegrated electronics will be a fully automated, closed-loop sensing-diagnosis-feedback device; the “feedback” that the device transmits will be information (e.g., a reminder to take medicine) or therapeutics (e.g., a pacemaker adjustment). Although the development of closed-loop biointegrated electronics is not yet fully realized, several types of stimulation and treatment are available.
One type involves the administration of a modulated electrical current to human skin to excite cutaneous mechanoreceptors, which provide instantaneous electrotactile feedbacks to the wearer in an acute and time-controlled manner (Warren et al. 2008). Figure 5A features a wearable finger tube that integrates high-performance inorganic electronics to sense finger-tip motion and provide electrotactile stimulation. The voltage-frequency combination to enable electrotactile sensation is shown in the right frame of Figure 5A (Ying et al. 2012).
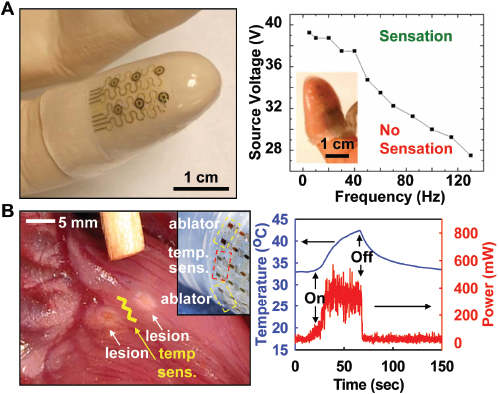
FIGURE 5 Biointegrated electrotactile stimulation and treatment tools based on stretchable electronics. (A) Wearable, conformable finger tube generates electrotactile sensation on human fingertip with suitably modulated current. Reprinted from Ying et al. (2012) with permission from IOP Publishing. (B) Lesions on a rabbit heart created by radio frequency (RF) ablators integrated on a balloon catheter (left frame). The supplied RF power and in situ tissue temperature measured by adjacent temperature sensors are shown in the right frame. Reprinted from Kim et al. (2011a) with permission from Nature Publishing Group.
As an in vivo example, Figure 5B shows lesions on a live rabbit heart, treated by radio frequency (RF) ablation as a therapeutic procedure to stop heart arrhythmia. The ablation was performed using stretchable electrodes on an inflatable balloon catheter (Kim et al. 2011a). Lesion size and depth can be determined with the use of in situ temperature monitoring during RF ablation (right frame). In vivo pretreatment sensing can provide critical information to guide treatment, and in situ posttreatment sensing can provide immediate data to evaluate treatment results and help guide the next treatment if any.
OUTLOOK
In the past decade, studies on mechanics, materials, and microfabrication techniques have advanced the design and manufacture of flexible and stretchable electronics, and it is likely that biointegrated electronics will soon revolutionize personal health care and human-machine interaction.
Further progress will likely depend on advances in the following areas. Maximization of the application potentials of wearable and implantable electronic systems will require the development of mechanically compatible and electronically sufficient microcontrollers, memory, power supply, and wireless data transmission modules. Multifunctional compliant systems that incorporate optical and biochemical tools would also be desirable. Another frontier of biointegrated electronics concerns transient electronics (Hwang et al. 2012). Roll-to-roll transfer printers for the deterministic assembly of inorganic semiconductors on polymer substrates hold the key for large-volume, low-cost manufacture of biointegrated electronics (Yang et al. 2012). More detailed discussion on the mechanics, materials, and functionalities of biointegrated electronics is available in several recent review articles (Kim et al. 2012a,c,d; Lu and Kim 2013).
REFERENCES
Bao ZN, Feng Y, Dodabalapur A, Raju VR, Lovinger AJ. 1997. High-performance plastic transistors fabricated by printing techniques. Chemistry of Materials 9:1299–1301.
Choi W, Song J, Khang D, Jiang H, Huang Y, Rogers J. 2007. Biaxially stretchable “wavy” silicon nanomembranes. Nano Letters 7:1655–1663.
Forrest SR. 2004. The path to ubiquitous and low-cost organic electronic appliances on plastic. Nature 428:911–918.
Forrest SR, Thompson ME. 2007. Introduction: Organic electronics and optoelectronics. Chemical Reviews 107:923–925.
Garnier F, Hajlaoui R, Yassar A, Srivastava P. 1994. All-polymer field-effect transistor realized by printing techniques. Science 265:1684–1686.
Gerdle B, Karlsson S, Day S, Djupsjöbacka M. 1999. Acquisition, processing and analysis of the surface electromyogram. In: Windhorst U, Johansson H, eds. Modern Techniques in Neuroscience Research. Berlin: Springer Verlag. pp. 705–755.
Huang X, Yeo WH, Liu YH, Rogers JA. 2012. Epidermal differential impedance sensor for conformal skin hydration monitoring. Biointerphases 7:1–9.
Hwang SW, Tao H, Kim DH, Cheng HY, Song JK, Rill E, Brenckle MA, Panilaitis B, Won SM, Kim YS, Song YM, Yu KJ, Ameen A, Li R, Su YW, Yang MM, Kaplan DL, Zakin MR, Slepian MJ, Huang YG, Omenetto FG, Rogers JA. 2012. A physically transient form of silicon electronics. Science 337:1640–1644.
Kaltenbrunner M, White MS, Glowacki ED, Sekitani T, Someya T, Sariciftci NS, Bauer S. 2012. Ultrathin and lightweight organic solar cells with high flexibility. Nature Communications 3:770.
Khang DY, Jiang HQ, Huang Y, Rogers JA. 2006. A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates. Science 311:208–212.
Kim DH, Ahn JH, Choi WM, Kim HS, Kim TH, Song JZ, Huang YGY, Liu ZJ, Lu C, Rogers JA. 2008a. Stretchable and foldable silicon integrated circuits. Science 320:507–511.
Kim DH, Song JZ, Choi WM, Kim HS, Kim RH, Liu ZJ, Huang YY, Hwang KC, Zhang YW, Rogers JA. 2008b. Materials and noncoplanar mesh designs for integrated circuits with linear elastic responses to extreme mechanical deformations. Proceedings of the National Academy of Sciences U S A 105:18675–18680.
Kim DH, Kim YS, Wu J, Liu ZJ, Song JZ, Kim HS, Huang YGY, Hwang KC, Rogers JA. 2009. Ultrathin silicon circuits with strain-isolation layers and mesh layouts for high-performance electronics on fabric, vinyl, leather, and paper. Advanced Materials 21:3703–3709.
Kim DH, Viventi J, Amsden JJ, Xiao JL, Vigeland L, Kim YS, Blanco JA, Panilaitis B, Frechette ES, Contreras D, Kaplan DL, Omenetto FG, Huang YG, Hwang KC, Zakin MR, Litt B, Rogers JA. 2010a. Dissolvable films of silk fibroin for ultrathin conformal bio-integrated electronics. Nature Materials 9:511–517.
Kim DH, Lu NS, Ghaffari R, Kim YS, Lee SP, Xu LZ, Wu JA, Kim RH, Song JZ, Liu ZJ, Viventi J, de Graff B, Elolampi B, Mansour M, Slepian MJ, Hwang S, Moss JD, Won SM, Huang YG, Litt B, Rogers JA. 2011a. Materials for multifunctional balloon catheters with capabilities in cardiac electrophysiological mapping and ablation therapy. Nature Materials 10:316–323.
Kim DH, Lu NS, Ma R, Kim YS, Kim RH, Wang SD, Wu J, Won SM, Tao H, Islam A, Yu KJ, Kim TI, Chowdhury R, Ying M, Xu LZ, Li M, Chung HJ, Keum H, McCormick M, Liu P, Zhang YW, Omenetto FG, Huang YG, Coleman T, Rogers JA. 2011b. Epidermal electronics. Science 333:838–843.
Kim DH, Ghaffari R, Lu NS, Rogers JA. 2012a. Flexible and stretchable electronics for bio-integrated devices. Annual Review of Biomedical Engineering 14:113–128.
Kim DH, Ghaffari R, Lu NS, Wang SD, Lee SP, Keum H, D’Angelo R, Klinker L, Su YW, Lu CF, Kim YS, Ameen A, Li YH, Zhang YH, de Graff B, Hsu YY, Liu ZJ, Ruskin J, Xu LZ, Lu C, Omenetto FG, Huang YG, Mansour M, Slepian MJ, Rogers JA. 2012b. Electronic sensor and actuator webs for large-area complex geometry cardiac mapping and therapy. Proceedings of the National Academy of Sciences U S A 109:19910–19915.
Kim DH, Lu NS, Ghaffari R, Rogers JA. 2012c. Inorganic semiconductor nanomaterials for flexible and stretchable bio-integrated electronics. NPG Asia Materials 4:e15.
Kim DH, Lu NS, Huang YG, Rogers JA. 2012d. Materials for stretchable electronics in bioinspired and biointegrated devices. MRS Bulletin 37:226–235.
Kim DH, Wang SD, Keum H, Ghaffari R, Kim YS, Tao H, Panilaitis B, Li M, Kang Z, Omenetto F, Huang YG, Rogers JA. 2012e. Thin, flexible sensors and actuators as “instrumented” surgical sutures for targeted wound monitoring and therapy. Small 8(21):3263–3268.
Kim RH, Kim DH, Xiao JL, Kim BH, Park SI, Panilaitis B, Ghaffari R, Yao JM, Li M, Liu ZJ, Malyarchuk V, Kim DG, Le AP, Nuzzo RG, Kaplan DL, Omenetto FG, Huang YG, Kang Z, Rogers JA. 2010b. Waterproof AlInGaP optoelectronics on stretchable substrates with applications in biomedicine and robotics. Nature Materials 9:929–937.
Kim S, Wu JA, Carlson A, Jin SH, Kovalsky A, Glass P, Liu ZJ, Ahmed N, Elgan SL, Chen WQ, Ferreira PM, Sitti M, Huang YG, Rogers JA. 2010c. Microstructured elastomeric surfaces with reversible adhesion and examples of their use in deterministic assembly by transfer printing. Proceedings of the National Academy of Sciences U S A 107:17095–17100.
Ko HC, Stoykovich MP, Song JZ, Malyarchuk V, Choi WM, Yu CJ, Geddes JB, Xiao JL, Wang SD, Huang YG, Rogers JA. 2008. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 454:748–753.
Lee J, Wu JA, Shi MX, Yoon J, Park SI, Li M, Liu ZJ, Huang YG, Rogers JA. 2011. Stretchable GaAs photovoltaics with designs that enable high areal coverage. Advanced Materials 23:986–991.
Lipomi DJ, Tee BCK, Vosgueritchian M, Bao ZN. 2011. Stretchable organic solar cells. Advanced Materials 23:1771–1775.
Lu N, Kim DH. 2013. Flexible and stretchable electronics paving the way for soft robotics. Soft Robotics 1:53–62.
Mannsfeld SCB, Tee BCK, Stoltenberg RM, Chen CVHH, Barman S, Muir BVO, Sokolov AN, Reese C, Bao ZN. 2010. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nature Materials 9:859–864.
Meitl MA, Zhu ZT, Kumar V, Lee KJ, Feng X, Huang YY, Adesida I, Nuzzo RG, Rogers JA. 2006. Transfer printing by kinetic control of adhesion to an elastomeric stamp. Nature Materials 5:33–38.
Menard E, Meitl MA, Sun YG, Park JU, Shir DJL, Nam YS, Jeon S, Rogers JA. 2007. Micro- and nanopatterning techniques for organic electronic and optoelectronic systems. Chemical Reviews 107:1117–1160.
Park SI, Xiong YJ, Kim RH, Elvikis P, Meitl M, Kim DH, Wu J, Yoon J, Yu CJ, Liu ZJ, Huang YG, Hwang K, Ferreira P, Li XL, Choquette K, Rogers JA. 2009. Printed assemblies of inorganic light-emitting diodes for deformable and semitransparent displays. Science 325:977–981.
Rogers JA, Bao Z, Baldwin K, Dodabalapur A, Crone B, Raju VR, Kuck V, Katz H, Amundson K, Ewing J, Drzaic P. 2001. Paper-like electronic displays: Large-area rubber-stamped plastic sheets of electronics and microencapsulated electrophoretic inks. Proceedings of the National Academy of Sciences U S A 98:4835–4840.
Rogers JA, Someya T, Huang YG. 2010. Materials and mechanics for stretchable electronics. Science 327:1603–1607.
Service RF. 2006. Materials science: Inorganic electronics begin to flex their muscle. Science 312:1593–1594.
Someya T, Sekitani T, Iba S, Kato Y, Kawaguchi H, Sakurai T. 2004. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proceedings of the National Academy of Sciences U S A 101:9966–9970.
Son D, Lee J, Qiao S, Ghaffari R, Kim J, Lee JE, Song C, Kim SJ, Lee DJ, Jun SW, Yang S, Park M, Shin J, Do K, Lee M, Kang K, Hwang CS, Lu N, Hyeon T, Kim D-H. 2013. Nanoparticle-embedded wearable memory, sensors and actuators for diagnosis and therapy of movement disorders. Submitted to Nature Nanotechnology.
Song YM, Xie Y, Malyarchuk V, Xiao J, Jung I, Choi KJ, Liu Z, Park H, Lu C, Kim RH, Li R, Crozier KB, Huang Y, Rogers JA. 2013. Digital cameras with designs inspired by the arthropod eye. Nature 497:95–99.
Sun JY, Lu NS, Yoon J, Oh KH, Suo ZG, Vlassak JJ. 2009. Inorganic islands on a highly stretchable polyimide substrate. Journal of Materials Research 24:3338–3342.
Sun YG, Choi WM, Jiang HQ, Huang YGY, Rogers JA. 2006. Controlled buckling of semiconductor nanoribbons for stretchable electronics. Nature Nanotechnology 1:201–207.
Takei K, Takahashi T, Ho JC, Ko H, Gillies AG, Leu PW, Fearing RS, Javey A. 2010. Nanowire active-matrix circuitry for low-voltage macroscale artificial skin. Nature Materials 9:821–826.
Viventi J, Kim DH, Moss JD, Kim YS, Blanco JA, Annetta N, Hicks A, Xiao JL, Huang YG, Callans DJ, Rogers JA, Litt B. 2010. A conformal, bio-interfaced class of silicon electronics for mapping cardiac electrophysiology. Science Translational Medicine 2:24ra22.
Viventi J, Kim DH, Vigeland L, Frechette ES, Blanco JA, Kim YS, Avrin AE, Tiruvadi VR, Hwang SW, Vanleer AC, Wulsin DF, Davis K, Gelber CE, Palmer L, Van der Spiegel J, Wu J, Xiao JL, Huang YG, Contreras D, Rogers JA, Litt B. 2011. Flexible, foldable, actively multiplexed, high-density electrode array for mapping brain activity in vivo. Nature Neuroscience 14:1599–1605.
Warren JP, Bobich LR, Santello M, Sweeney JD, Tillery SIH. 2008. Receptive field characteristics under electrotactile stimulation of the fingertip. IEEE Transactions on Neural Systems and Rehabilitation Engineering 16:410–415.
Webster JG. 2009. Medical Instrumentation: Application and Design. New York: Wiley.
Xu S, Zhang YH, Cho J, Lee J, Huang X, Jia L, Fan JA, Su YW, Su J, Zhang HG, Cheng HY, Lu BW, Yu CJ, Chuang C, Kim TI, Song T, Shigeta K, Kang S, Dagdeviren C, Petrov I, Braun PV, Huang YG, Paik U, Rogers JA. 2013. Stretchable batteries with self-similar serpentine interconnects and integrated wireless recharging systems. Nature Communications 4:1543.
Yang SY, Carlson A, Cheng HY, Yu QM, Ahmed N, Wu J, Kim S, Sitti M, Ferreira PM, Huang YG, Rogers JA. 2012. Elastomer surfaces with directionally dependent adhesion strength and their use in transfer printing with continuous roll-to-roll applications. Advanced Materials 24:2117–2122.
Yeo W-H, Kim Y-S, Lee J, Ameen A, Shi L, Li M, Wang S, Ma R, Jin SH, Kang Z, Huang Y, Rogers JA. 2013. Multifunctional epidermal electronics printed directly onto the skin. Advanced Materials 25(2):2773–2778.
Ying M, Bonifas AP, Lu NS, Su YW, Li R, Cheng HY, Ameen A, Huang YG, Rogers JA. 2012. Silicon nanomembranes for fingertip electronics. Nanotechnology 23:344004.
Yoon J, Baca AJ, Park SI, Elvikis P, Geddes JB, Li LF, Kim RH, Xiao JL, Wang SD, Kim TH, Motala MJ, Ahn BY, Duoss EB, Lewis JA, Nuzzo RG, Ferreira PM, Huang YG, Rockett A, Rogers JA. 2008. Ultrathin silicon solar microcells for semitransparent, mechanically flexible and micro-concentrator module designs. Nature Materials 7:907–915.
Yoon J, Jo S, Chun IS, Jung I, Kim HS, Meitl M, Menard E, Li XL, Coleman JJ, Paik U, Rogers JA. 2010. GaAs photovoltaics and optoelectronics using releasable multilayer epitaxial assemblies. Nature 465:329–333.
This page intentionally left blank.














