

4 Operations, Logistics, and Coordination in an Arctic Oil Spill
Several types of commercial activities are increasing in the Arctic, leading to the prospect of rapid growth in shipping along several routes. For example, use of the Northern Sea Route, and to a lesser extent the Northwest Passage, as a transportation route (Figure 4.1) is now more possible than ever before (IPCC, 2014). While some commercial shippers do not believe it will be economically viable for shipping in the near future (presentation by Gene Brooks, Maersk, February 2013), increased seasonal use by tankers and tug barges seems likely (Arctic Council, 2009). Taken along with other forms of vessel traffic, such as the tanker traffic from the Northern Sea Route, bulk carriers and tug-barge traffic transporting minerals and other bulk commodities, the inevitable increase in fishing fleets as fish stocks migrate northward, and even cruise ships that offer a glimpse of the Arctic for tourists, the Arctic has become a much busier place, with all of the associated risks that increased traffic involves. For the United States, the implications for traffic management, and by association, environmental protection, are very real. Keeping oil out of the water will not be purely a function of sound drilling practices, but of sound vessel traffic management, which raises a host of concerns for protection of Arctic ecosystems and for preparedness to respond in the event of a marine accident. It is also a concern for all Arctic nations, as an oil spill that occurs in one part of the Arctic may cross geographic boundaries and impact other nations’ waters, food supplies, livelihoods, and cultural resources.
Spills from these anticipated activities are likely to be relatively small and involve lighter oils (e.g., diesel, heating oil). Less likely but more consequential spills would be associated with offshore oil exploration and production, as well as from large bulk carriers operating from Kotzebue. Vessels operating from U.S. ports are subject to the contingency planning requirements of the Oil Pollution Act of 1990 (OPA 90). To cope with changing traffic patterns in the Arctic, significant investments in infrastructure and capabilities, such as navigational aids, charting, communications, real-time traffic monitoring, ice forecasting, ship repair, and salvage capabilities, are needed.
As first introduced in the risk-based framework of Chapter 3, seven oil spill response scenarios are presented throughout this chapter and the next. Each scenario is color-coded to match its location on the risk-based framework shown in Figure 3.1. There are a number of issues that are common to all the Arctic scenarios in the report. For instance, oil spill response strategies will vary with
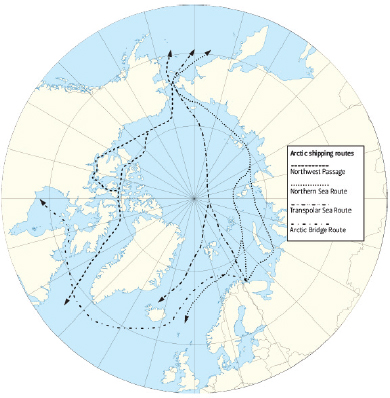
Figure 4.1 Arctic sea routes. SOURCE: Mikkola and Käplyä (2013); data from the Arctic Institute.
weather, ice cover, oil type, location, and available resources. A critical issue is the general inability to immediately respond and a lack of supporting infrastructure and capabilities (e.g., equipment, training, logistics), which has repercussions on response effectiveness. In some instances, especially in international events, the determination of who is responsible for the spill or who has authority for a response may need to be clarified. The issue of a responsible party, discussed later in this chapter, may impact how response, recovery, and salvage will be carried out and how eventual environmental restitution will be funded. Further issues of importance are the effects on the social, economic, and subsistence patterns on Arctic communities and impacts to the environment and ecosystem.
RESPONSE ORGANIZATIONS
Viable spill response options will vary depending on the nature of the spill, its location, and prevailing environmental conditions. Other variables to be considered include the proximity of the oil spill to sensitive marine ecosystems; the presence and density of marine life; and, in many coastal Arctic areas, culturally significant sites (ADEC Spill Prevention and Response, 2002b). Each spill requires an assessment of the risks and efficacy of potential response options in order to remove the pollutant as completely as possible without causing additional environmental harm. Not all response
Scenario 1 Passenger Cruise Ship Accident
A passenger cruise ship accident in the Arctic could occur from a ship grounding due to poorly charted bathymetry, operator error, or ice, among other possibilities. This could occur anywhere along the coastline of the U.S. Beaufort or Chukchi Seas.
Main Considerations
The ship may be foreign flagged and/or may not have intended to enter the U.S. Exclusive Economic Zone, but the accident and potential spill will have impacts in U.S. waters and may require U.S. resources. Search and rescue operations would take precedence over oil spill response throughout the event, and logistics such as housing, food, medical support, and sanitary resources in remote Arctic villages for rescued passengers and responders could be difficult. Personnel rescue and/or recovery could consume scarce resources that are available and planned for oil spill response.
Standard Response
Responsible party (tasked to assume rescue and oil spill response leadership) is identified, Unified Command is activated, and (as mentioned above) personnel rescue is prioritized over oil spill response.
Response Needs
High-quality nautical charts, ice data and charts, adequate training and exercises for combined or complex incidents (personnel rescue/evacuation/oil spill response), and supply chain logistics for rescued passengers and oil spill responders are needed.
tools are appropriate in every scenario, but each should be considered within the framework of a Net Environmental Benefit Analysis, which will be considered more completely in Chapter 5.
Managing these variables requires a multiskilled response organization that can rapidly assess the situation, develop response priorities, identify and deploy response resources, conduct removal operations, and monitor the results. These activities need to be informed by scientific knowledge, benefits and drawbacks of each option need to be properly weighted, and activities need to be undertaken with an understanding of the complex legal framework that imposes responsibilities on different parties in an oil spill response.
Marine oil spills can occur from a number of sources and under a wide range of conditions, including originating from land sources or from vessels. A vessel spill that threatens U.S. Arctic waters and coastlines can originate in waters beyond U.S. jurisdiction. In such a case, the response organization will take on an international dimension, involving a broader and more complicated coordination challenge.
OPA 90 places the primary responsibility for mounting an effective response on the spiller (known as the responsible party [RP]). However, federal, state, local, and tribal entities each have
legal authorities to oversee, approve, and, if needed, supplement the measures undertaken by the spiller. A wide range of federal and state laws, as well as international treaties and agreements, weaves a complex web of duties, responsibilities, and authorities for all parties involved in a spill response. Accounting for these various laws and agreements is an integral aspect of a response organization’s operations. Consequently, U.S. spill response efforts are organized along a standard construct that is followed by federal and state officials and by operators of vessels and regulated marine facilities.
THE NATIONAL RESPONSE SYSTEM
The National Response System is the federal government’s mechanism for responding to oil spills and releases of hazardous materials. It operates through a network of federal agencies, described in the regulation under which EPA and USCG conduct spill response, the National Oil and Hazardous Substance Pollution Contingency Plan (40 C.F.R. Part 300).
Key Components
Key components of the National Response System and its relevance for the Arctic include the following:
Federal On-Scene Coordinator (FOSC)—a federal official designated to coordinate the federal government’s response to a spill. The FOSC also coordinates with the affected state(s) and directs the response efforts of the responsible party. Although the law places the principal response burden on the RP, the FOSC may supplement or direct the RP’s actions if needed to ensure an effective response. In cases where the RP is not known, the FOSC will directly manage the response using funds from the Oil Spill Liability Trust Fund (OSLTF). In the coastal zone, the predesignated FOSC is typically the U.S. Coast Guard (USCG) Captain of the Port, while the Environmental Protection Agency (EPA) is predesignated for a spill in the inland zone. For the Arctic coastal zone, jurisdiction lies with the Western Alaska USCG Captain of the Port. There are also State On-Scene Coordinators (SOSCs) for a response; in Alaska, the Alaska Department of Environmental Conservation (ADEC) serves as the predesignated SOSC.
Area Contingency Plan—FOSCs are also responsible for working with the Area Committee, a group comprising federal and state representatives, to develop an Area Contingency Plan that identifies sensitive areas and resources to be protected. The plan also identifies likely pollution scenarios, available response options, and the logistical requirements to put the plan into effect. Participation by local officials and non-governmental organizations is encouraged, as is participation by commercial spill response organizations. The State of Alaska is a member of the Area Committee and is represented by ADEC. Area committees will also normally consider special response techniques that may be appropriate for their geographic region.
In Alaska, the Area Contingency Plan requirement is satisfied through the Alaska Federal and
State Preparedness Plan for Response to Oil and Hazardous Materials Discharges and Releases1 (known as the Unified Plan), which was developed jointly between the State of Alaska, USCG, and EPA. The Unified Plan contains 10 geographically specific subarea plans, which allow for focused planning and interaction with local officials and tribal leaders (ADEC Spill Prevention and Response, 2010a). In the Arctic, these are the North Slope and Northwest Arctic SubArea Plans.
Regional Response Team (RRT)—a team comprising federal, state, and local officials with broader geographic responsibility than an individual FOSC, charged with providing advice and assistance. RRTs are typically co-chaired by the EPA Regional Office and the USCG District Office. RRTs are directly involved in decisions related to the use of special response techniques, such as dispersants and in situ burning (ISB), including pre-authorization for their use under certain defined conditions.
The Alaska RRT is co-chaired by EPA Region 10 and the USCG 17th District. Federal resource trustees from the National Oceanic and Atmospheric Administration (NOAA) and the U.S. Department of the Interior are members, as are a number of agency representatives in the region. While ISB is pre-authorized under defined conditions, the Alaska RRT has not granted pre-authorization for the use of dispersants.
National Response Team (NRT)—a team comprising 16 federal agencies with expertise in environmental protection and response. It is a planning and coordination body that produces national-level policy. Although not envisioned as a response body, the NRT can provide real-time assistance and advice to decision makers in the event of a Spill of National Significance (discussed below).
National Response Center—a 24-hour national call center for reporting oil spills and hazardous materials releases. Spillers are required to notify the National Response Center even if they have already notified local officials. The National Response Center ensures that all relevant federal agencies and the appropriate FOSC are promptly advised of the report so that an appropriate response can be initiated.
Special Teams
National Strike Force—three specialized teams that are maintained by the USCG but are available to any FOSC and are available to deploy on short notice. They possess equipment and training that exceed typical FOSC resources. Teams are located in California (Pacific Strike Team), New Jersey (Atlantic Strike Team), and Alabama (Gulf Strike Team), but they regularly support responses outside of their primary areas as needed. When deployed, they work directly for the FOSC and can fit into a standard response organization.
Environmental Response Team—an EPA team of specially trained scientists and engineers who have expertise in sampling, analysis, hazard assessment, and technical support.
_____________
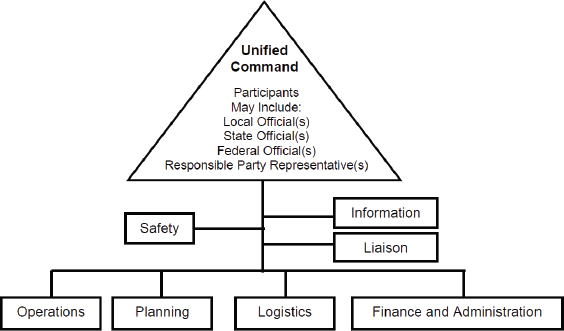
Figure 4.2 Relationship between Incident Command System and Unified Command.
SOURCE: National Response Team Technical Assistance Document: http://www.nrt.org/Production/NRT/NRTWeb.nsf/AllAttachmentsByTitle/SA-52ICSUCTA/$File/ICSUCTA.pdf?OpenElement.
Scientific Support Coordinator—an individual assigned to assist the FOSC in gathering and analyzing environmental and safety information in order to enable the FOSC to make timely operational decisions. For spills in the coastal zone, scientific support coordinators are typically provided by NOAA.
NATIONAL INCIDENT MANAGEMENT SYSTEM/INCIDENT COMMAND SYSTEM
Spill response involves multiple organizations coming together to address a common problem. Some of these organizations may never have worked together before, although responders in the same geographic area are likely to have coordinated through periodic exercises designed to test the Area Plan. The Federal Emergency Management Agency (FEMA) National Response Framework envisions a National Incident Management System/Incident Command System (NIMS/ICS)-based response (Figure 4.2), which originated in the fire service to coordinate multiple firefighting services for fighting western wildfires.2 The ICS concept is now used by the federal government to organize for all emergencies (DHS, 2008). NIMS/ICS includes standard organizational structures, planning cycles, and terminologies, and enables all participants (the RP and federal, state, local, and tribal governments) to organize in a consistent, commonly understood manner. It provides a unified command structure, with a command element typically comprising the FOSC, SOSC, and the RP’s
_____________
2 See http://training.fema.gov/EMIWeb/is/ICSResource/assets/reviewMaterials.pdf.
On-Scene Coordinator. In Alaska, there is also a provision for a Local On-Scene Coordinator to represent local communities. No one surrenders their authorities or responsibilities under this construct; instead, they are positioned to carry out their responsibilities in a coordinated way. Exercises that employ ICS principles are conducted on a regular basis so that federal and state responders are familiar with each other. There is active involvement by the communities and tribal leaders, who provide invaluable local knowledge and expertise.
The Alaska Incident Management System Guide for Oil and Hazardous Substance Response provides standardized oil spill response management guidelines to responders in Alaska (ADEC, 2002). The Alaska Incident Management System Guide meshes with the National Response Framework and NIMS/ICS but is specific to the state’s interests.
LEGAL FRAMEWORK FOR POLLUTION PREPAREDNESS AND RESPONSE
The response organization must fulfill its function in compliance with a host of federal and state laws, international treaties and agreements, and contingency plans. These are detailed below.
U.S. FEDERAL LAWS AND REGULATIONS
The Oil Pollution Act of 1990
The Oil Pollution Act of 1990 (OPA 90; P.L. 101-380), possibly the most well-known federal pollution statute, was passed in the wake of the Exxon Valdez spill in Prince William Sound, Alaska. It is the principal statute underpinning preparedness requirements, response organization, and liabilities of the responsible party and has had a profound effect on the way the United States responds to marine spills.
OPA 90 amended and strengthened provisions of the Clean Water Act (P.L. 92-500). While OPA 90 reinforced the concept that the RP has the primary duty to organize and carry out an effective response, it enhanced the authority of the FOSC to direct the response actions. The law also imposed strict planning requirements on vessel operators, including securing the equipment needed to effectively respond to spills and identifying a qualified individual that has the authority to commit company resources to respond to a spill or potential spill. OPA 90 also mandated that commercial operators have the financial ability to fund a spill response originating from their facility or vessel. How a vessel or marine facility intends to respond to spills of various magnitudes is contained in a formal Response Plan, which must receive federal approval before the vessel or facility is allowed to operate. Not all RPs are equal in terms of their liability limits or degree of preparation, as noted below:
- Tank vessels are subject to the most stringent OPA 90 requirements in terms of preplanning, vessel response plans, equipment, and exercise programs. Tankers must also demonstrate that they have liability coverage to fund their spill response costs and any associated environmental damage. Liability coverage is documented in a “Certificate of Financial
-
Responsibility” issued by the National Pollution Funds Center, an entity established by OPA 90, and administered by the USCG. The amount of required coverage varies by the gross tonnage, the type of vessel, and whether it is fitted with a double hull. Double-hulled tankers above 3,000 gross tons must provide coverage of $2,000 per gross ton or $17.088 million, whichever is greater (see 33 U.S.C. § 2704). Single-hull tankers would have an even greater liability—$3,200 per gross ton or $23.5 million, whichever is greater. Of note, single-hulled tankers are rapidly being phased out. All must have double hulls by 2014 due to OPA 90 requirements and comparable international standards in the International Convention for the Prevention of Pollution from Ships (MARPOL). There are no cases on record where response costs have exceeded liability limits for double-hulled tankers, but it is possible that if a large double-hulled tanker had a serious incident, response costs could quickly outstrip the liability limits. In the event of a spill, once the liability limit is reached, it may be difficult to compel the RP to continue funding the response (USCG, 2012).
- Nontank vessels (e.g., freight ships, cruise ships) are also subject to OPA 90 planning and response requirements and must also possess evidence of financial liability. However, specific planning details which would form the basis for the Vessel Response Plan have not yet been finalized in regulation. This is the subject of an ongoing regulatory project by the USCG, and represents additional variability in the preparedness of these vessels in the interim. Nontank vessel financial responsibility for vessels greater than 300 gross tons is $1,000 per gross ton or $854,400, whichever is greater. Given the potential for large cargo vessels to carry in excess of 400,000 gallons of fuel oil, their liability limit could conceivably be quickly reached in the aftermath of a serious casualty in the Arctic,3 an issue of serious concern as shipping potentially increases.
- Tank barges such as those used in coastal fuel delivery are subject to similar planning and preparedness requirements as tankers. Their liability limits mirror those for tankers, based upon their tonnage and whether they are single or double hulled. Double-hulled barges of 3,000 gross tons or greater will have the same limits as for double-hulled tankers. However, many tank barges in regular service to the Alaskan Arctic are less than 3,000 gross tons. Assuming a double hull, their liability limit is $2,000 per ton or $4,272,000, whichever is greater.
- Offshore facilities are not limited in liability for spills, with the exception of deepwater ports. The liability is for all removal costs plus $75 million for damages.4 Oil Spill Response Plans are reviewed and approved by the Bureau of Safety and Environmental Enforcement (BSEE) and are coordinated with subarea plans.
- Onshore facilities and deepwater ports have a liability limit of $350 million.5 OPA 90 identified the NIMS/ICS as the standard response framework that plan holders must incorporate into their response organizations in order to facilitate the assimilation of multiple
_____________
3 According to the USCG Annual Report to Congress on Oil Spill Liability in 2012, “the available data continue to suggest that the existing liability limits for certain vessel types notably tank barges and cargo vessels with substantial fuel oil, may not sufficiently account for historic costs incurred as a result of an oil discharge from these vessel types.”
4 33 U.S.C. § 2704.
5 33 U.S.C. § 2704.
Late in the season, a large tanker transiting through Russian waters from the Northern Sea Route experiences structural damage and loses power as it passes through the Bering Strait. After communicating with both Russian and American authorities, the tanker grounds on Big Diomede Island. The tanker is carrying nearly 30 million gallons of crude oil. Although much of the oil being carried is spilled immediately, some remains and continues to slowly seep out. The tanker is not owned by a U.S. individual or corporation, nor is it registered in the United States. During its transit, the tanker never entered U.S. water. However, the oil is likely to have significant impacts in U.S. waters, due to seasonal winds and currents.
Main Considerations
The primary issue is how to address a spill by a foreign flagged vessel on a voyage that never enters U.S. waters, yet could have major impacts on the United States due to the spilled oil. Bad weather, low visibility, ice impacts on the response and rescue efforts, shoreline contamination in remote areas, and oil in ice are likely to extend cleanup over the winter months.
Standard Response
In the absence of a clear or immediately identifiable responsible party, the U.S. Coast Guard will assume a leadership and oversight role. The Unified Command and U.S. Coast Guard may also exercise existing bilateral and multilateral international agreements.
Response Needs
Enhanced vessel traffic monitoring, protocols to identify the responsible party, adequate predeployed spill response equipment, resources for shoreline contamination cleanup, and adequate training and exercises for local response personnel (working with Unified Command personnel) in adverse weather during the winter are needed.
federal, state, local, and private entities into the response effort. Federal officials are also required to plan for their role in coordinating the federal response to a spill, in conjunction with state and local officials.
Executive Order 12777, issued October 1991, clarified some responsibilities assigned in OPA 90. This included that the National Contingency Plan (NCP) provide for an NRT and RRTs composed of representatives of appropriate federal departments and agencies for national or regional coordination and planning. Five agencies (Departments of Commerce, Interior, Defense, Agriculture, and Energy) were identified for inclusion in the NCP as trustees to look after federal environmental interests, while EPA and USCG were assigned to designate Areas and Area Committee Members. Responsibility for oversight of spill planning and equipment inspections was also assigned to the Coast Guard for ships and marine facilities, to EPA for shore-based facilities, to the Department of the Interior for offshore installations, and to the Department of Transportation for pipelines.
Scenario 3 Bulk Ore Carrier Driven Onshore in Bad Weather
In a scenario similar to the Selendang Ayu, a bulk ore carrier is in the Arctic during the summer, when shipments are being made from the Red Dog Mine. Storm conditions cause the ship to lose propulsion and ground it onshore. The bulk ore carrier is carrying heavy fuel oil in excess of 100,000 gallons.
Main Considerations
A major issue in this scenario is that while it is relatively easy to identify the bulk ore shipper as the responsible party, there is less regulatory oversight than there is with oil/fuel shippers. Other considerations include the potential for an oil spill due to loss of fuel, and that spilled or damaged cargo or its cleanup may have environmental or human health risks.
Standard Response
Responsible party assumes leadership role for cleanup, an oil spill removal organization (OSRO) is identified, and salvage capabilities and response are identified and activated.
Response Needs
Adequate Arctic oil spill response infrastructure, parity in regulatory oversight for bulk and petroleum shipping, identification of OSROs for oil spills from nonpetroleum shippers, resources for nearshore spill response, training and exercises for combined or complex events (salvage/cargo cleanup/oil spill response), and training and exercises for local responders working with the Unified Command are needed.
National Contingency Plan
While the Clean Water Act as amended by OPA 90 sets expectations and legal responsibilities, the overall details for how the government responds are contained in the NCP (40 C.F.R. Part 300), a regulation administered by the EPA. It was first developed in 1968 after the Torrey Canyon oil spill in the United Kingdom, in order to ensure that the United States was prepared to respond to spills in national waters. The NCP was updated and expanded after passage of the Clean Water Act in 1972 and OPA 90.
The NCP provides the regulatory framework for the NRT, RRT, and the role of the FOSC. It also establishes the unified command structure for handling responses and maps out the general pattern of response to be followed by the FOSC, including determining the threat, classifying the size and type of the release, notifying the RRT and National Response Center, and supervising removal actions.
The NCP defines Spills of National Significance (SONS) as having magnitudes that outstrip regional capabilities. These spills can have far-reaching public health effects, widespread environmental impacts, and economic damage. A SONS will involve senior levels of government and require response on a national scale and may also require the use of national capabilities not commonly envi-
sioned in more routine responses—for example, national security assets such as satellite capability or military capabilities including naval, aviation, and command and control assets. The 2010 Deepwater Horizon oil spill was the first SONS to occur after OPA 90 was passed. SONS exercises are held every three years in different regions of the country and include an industry volunteer to serve as the RP.
Other National Legislation
In addition to OPA 90, there are several key laws that influence the nature of any response, the considerations for restoration, and the liability of the spiller. One of these is the National Environmental Policy Act (1970), which imposes requirements on federal agencies to conduct an environmental assessment and, if necessary, an environmental impact statement, for major federal actions affecting environmental quality. Typically, pollution response operations have been categorically excluded if there were no extraordinary circumstances. Another is the Act to Prevent Pollution from Ships (1980), which incorporates the MARPOL Convention into U.S. law (33 U.S.C. §§ 1901-1912). Other laws include the Endangered Species Act (1973), the Marine Mammal Protection Act (1972), the Migratory Bird Treaty Act (1918), and the National Historic Preservation Act (1966, as amended).
STATE LAWS
ADEC is authorized to establish regulations that control, prevent, and mitigate all forms of pollution. Legislation enacted in 1980 defined Alaska’s policies regarding oil spills (1980 Session Laws of Alaska, Ch. 116: “An Act relating to the prevention and control of oil pollution; and providing for an effective date”). The law’s purpose is to ensure the safety and protection of human health and welfare of Alaskans from damage resulting from oil spills and to allow for cleanup and restoration of damaged areas following a spill. In 1989, after the Exxon Valdez oil spill, the Alaska Legislature enacted additional legislation to further strengthen the state’s capability to deal with oil spills. The law was again revised in 1990 with specific elements, including oil discharge contingency plans, an incident command system that details specific responsibilities, and other actions to lessen oil spills and their consequences.
INTERNATIONAL TREATIES AND AGREEMENTS
MARPOL
MARPOL was originally adopted by the International Maritime Organization in 1973 and, following the MARPOL Protocol in 1978, came into force in 1983. The International Maritime Organization is a specialized body of the United Nations that has jurisdiction over maritime safety and marine environmental protection matters. MARPOL specifies design, equipment, and operational measures to prevent pollution, as well as the steps required in the event of an incident. Annex I (Oil) is specifically focused on oil pollution. In the 1980s, MARPOL was modified to require double
hulls on tankers, closely matching the requirements contained in OPA 90 and in 2006, it was again modified to require enhanced protection for fuel tanks on nontankers because of their potential to cause major oil spills. The United States, Canada, and the Russian Federation are party to Annex I of this Convention, along with approximately 150 other nations, representing 99% of global shipping (IMO, in press). In 1980, the Act to Prevent Pollution from Ships was passed by Congress, giving MARPOL the force of law in waters under U.S. jurisdiction. All ships subject to the convention and bound for a U.S. port are required to comply.
International Convention on Oil Pollution, Preparedness, Response and Cooperation
The 1990 International Maritime Organization Convention on Oil Pollution Preparedness, Response, and Cooperation (OPRC) provides a global framework for international cooperation in the event of major spills, including planning and mutual assistance, regional preparedness, and research and development. OPRC provides an international construct for more specific agreements between nations, as exists between the United States and Canada, and between the United States and Russia. OPRC also requires that international ships have a Shipboard Oil Pollution Emergency Plan, detailed under the MARPOL convention, which contains the steps ships must take to notify the appropriate authorities and sources of assistance in the event of an emergency. However, OPA 90 requires even more detailed response plans than what is required by OPRC/MARPOL.
Other Treaties and Legislation
The International Convention Relating to Intervention on the High Seas in Cases of Oil Pollution Casualties (1969) affirms the right of coastal nations to take appropriate measures to prevent, mitigate, or eliminate damage to its coastline as a result of a marine casualty occurring beyond its territorial sea. This convention is reflected in U.S. law through the Intervention on the High Seas Act of 1974 (33 U.S.C. § 1471). The International Convention on Salvage (1989) imposes obligations on vessel owners and salvors to exercise due care to protect the marine environment. It addresses economic incentives for the salvor to prevent environmental damage and provides for increased cooperation between salvors, public authorities, and other interested parties.
The Canadian Arctic Shipping Pollution Prevention Regulations specify when and where certain categories of vessel can enter specific Shipping Safety Control Zones,6 which cover Canadian Arctic waters from the U.S. border to Greenland. Zones were originally selected on the basis of ice severity, including dates of freeze-up or clearing and the potential to encounter multiyear ice. An amendment to these regulations now allows ship masters to enter and exit zones outside of the traditional zone/date system, but clearance to continue transiting is based on the characteristics of the ice regime and that vessel and ice conditions are transmitted to the Canadian Coast Guard. This system of controls applies to ships carrying more than 453 m3 of oil, which encompasses most commercial vessels. The system’s purpose is to prevent substandard vessels from entering Arctic
_____________
6 See http://www.tc.gc.ca/eng/marinesafety/tp-tp12259-appendicies-2872.htm.
waters and posing a risk of spills through hull damage or ice penetration of fuel tanks. There is no equivalent mechanism at the U.S. state or federal level designed to achieve this level of risk reduction.
Diplomatic Agreements
In May 2013, the member states of the Arctic Council (Canada, Denmark [also representing Greenland and the Faroe Islands], Finland, Iceland, Norway, the Russian Federation, Sweden, and the United States) signed an Agreement on Cooperation on Marine Oil Pollution Preparedness and Response in the Arctic. Its objective is to strengthen cooperation, coordination, and mutual assistance regarding preparedness and response capacity for oil spills in the Arctic. The parties agree to share information on response techniques and to assist each other with technical capability and expertise to the extent of their ability should a spill occur. Additionally, the agreement dictates that each party will maintain a national system for responding to oil spills, which at a minimum would include a national contingency plan. The agreement also specifies how or to what extent each party will designate authorities and contact points, provide notification to other states, undertake monitoring activities, and provide assistance or request assistance from other parties.
Bilateral Agreements
The United States has long engaged its regional neighbors in Arctic spill preparedness. Bilateral agreements with Canada and Russia predate the more recent and much broader Arctic Council agreement on spill response among all arctic nations. The 1974 Canada-United States Joint Maritime Pollution Contingency Plan contains a framework for cooperation between the United States and Canada in the event of a spill affecting or potentially affecting both countries. The relationship with Canada has been particularly well developed through a formal Canada–United States Joint Marine Pollution Contingency Plan (CANUS) and associated exercises. It began as an initiative for the Great Lakes but soon expanded to cover boundary areas in the Atlantic, in the Pacific Northwest, and in Alaska. Each geographic region has a specific annex that is exercised on a regular schedule to ensure familiarity with the plans. The plans envision a joint response effort, where technical expertise and capability are joined in a coordinated effort. Broad governmental cooperation on each side of the border has enabled both countries to refine their procedures and legal requirements for cross-border movement of technical experts and equipment in the event of an emergency. CANUS exercises have generally been focused on the Dixon Entrance, rather than in the Arctic, but the agreement was recently tested in an Arctic setting through the binational CANUSNORTH environmental response exercise held in August 2012 in Tuktoyaktuk, Northwest Territories.7 However, if oil exploration proceeds in the Canadian Beaufort Sea, a well blowout would likely transport oil westward into U.S. waters. In July 2013, the Canadian Coast Guard and USCG conducted their first-ever offshore oil spill drill near the Bering Strait, during which they deployed containment boom.8 There have been
_____________
7 See http://www.dfompo.gc.ca/media/npress-communique/2012/ca08-eng.htm.
8 See http://www.alaskajournal.com/Alaska-Journal-of-Commerce/July-Issue-4-2013/US-Canada-conduct-Bering-Straitspill-drill/.
other CANUSNORTH exercises, but most have been tabletop exercises to test policies and working relationships rather than equipment deployment.
The 1989 Agreement Concerning Cooperation in Combating Pollution in the Bering and Chukchi Seas in Emergency Situations focuses on the potential for both the U.S. and the Russian Federation to be affected by a marine spill in the Bering Sea, Bering Strait, and/or Chukchi Sea. It provides for the establishment of a joint response team and a joint response center in the event of an emergency. The agreement is administered by the USCG and the Russian Marine Pollution Control and Salvage Administration. Although there is communication between the respective responder agencies of the United States and Russia and oil spill communication exercises have been held, exercises to test the details of how such a large-scale response might occur have not occurred (RADM Thomas Ostebo and 17th Coast Guard District personnel, personal communication, February 4, 2013; March 20, 2013; and March 18, 2014). Given the increase in vessel traffic through the Bering Strait from ships using the Northern Sea Route (Marine Exchange of Alaska, 2009-2012), it is more likely that a joint response will be needed. The bilateral agreement provides a solid foundation for a joint response effort, although the myriad details of response cooperation during any given spill response could lead to significant delays unless worked out in advance.
If an oil spill occurred in Russian waters and was positioned to affect U.S. waters, it is essential for the United States to know where Russia would establish its command post, which of its agencies would be involved, what capabilities they would have available, and vice versa. There would also be a need for a structured information exchange to coordinate planning between the countries, including a mechanism to have liaison officers from each country at each other’s command post if desired (which would require a spill response expert in both countries who are fluent in both Russian and English). Because there have not been joint exercises, it is unclear whether U.S. spill response resources would be allowed to enter Russian waters to assist and, if so, what clearances or agreements would be needed, and what controls would be imposed on traffic transiting in the area. However, there is a history of cooperation between the Kamchatka Border Guard and USCG District 17, including fisheries enforcement and port calls. In addition the USCG and the Russian State Maritime Pollution Control, Salvage, and Rescue Administration have agreements in place to facilitate search and rescue and pollution response. On a practical level, D17 staff communicate directly with their Russian counterparts about search and rescue alerts and other emergencies (McConnell, 2013).
There are also concerns regarding how the RP construct would work in this case. It is unknown whether the RP identified by Russia could be held responsible for environmental or socioeconomic damages in the United States, and, if the RP is not willing to fund response operations on the U.S. side of the strait, whether the OSLTF would be sufficient to cover open ocean response and/or potential sociological costs for loss of livelihood for subsistence hunters.
DISCUSSION OF ISSUES
For spills occurring within U.S. jurisdiction, OPA 90 provides the necessary legal framework for funding response operations and providing compensation for damages. OPA 90 places the burden of responding and for financing response activities on the RP. The RP’s financial liability also extends to
funding economic claims for those affected by the spill, and for natural resource damages. Potential RPs who regularly operate vessels within the Arctic region are likely to be well prepared, due to their OPA 90 responsibilities. However, situations could arise where OPA 90 may not in itself provide sufficient cover for those affected by a spill. Spills occurring outside of U.S. jurisdiction, but which affect resources in the U.S. Exclusive Economic Zone or territorial seas, are problematic. In such cases, and absent any significant assets held within the United States, the RP may be outside the reach of U.S. law. Those who are simply transiting through the region without conducting a U.S. port call (and thereby triggering OPA 90 preparedness requirements) are also likely to place a significant burden on government capabilities. There would be a need to mobilize open ocean response capabilities, utilizing commercial contracts and quite likely government resources. The U.S. Department of Defense (DOD) resources may be particularly useful, including communications capability, cargo aircraft, surface vessels, and specialized equipment maintained by the Navy Supervisor of Salvage. The Coast Guard, as the predesignated FOSC for the coastal zone, has been in contact with the Alaska Command regarding contingency operations and has worked out mechanisms by which appropriate DOD or Alaska National Guard assets could be requested if deemed essential to a response effort.
Without an RP, the costs incurred by the responders are borne by the OSLTF, a revolving fund maintained by the federal government and administered by the USCG. The OSLTF is maintained through recouping costs and penalties from responsible parties and by imposing a tax on oil (currently 8 cents per barrel) as authorized by Congress. The OSLTF is divided into two funds—the principal fund is used to pay claims and to fund appropriations authorized by Congress for federal agencies to administer OPA 90, while the emergency fund provides $50 million annually for use in removal actions and to initiate natural resource damage assessments. Legislative authority exists to increase this amount to $100 million if needed. Further increases require congressional approval, with a statutory limit of $1 billion per incident, provided there are sufficient funds remaining in the OSLTF. Given the distances and austere environment of the Arctic, a sustained response would be very expensive and could quickly draw down available OSLTF funding. In addition to direct response costs, there are often serious economic effects as well as potential health effects on local communities, which may also be chargeable to the OSLTF.
Unlike oil spill response, many domestic emergencies (such as hurricanes) make use of DOD assets after a Stafford Act declaration by the President. These assets are funded through FEMA after the issuance of Mission Assignments. A “whole of government” response, similar to a Stafford Act response, could be needed to manage community needs beyond direct economic loss (e.g., medical monitoring, seafood safety). This would not only incur additional costs, but also require expertise in multiple disciplines. During the Deepwater Horizon oil spill, a Stafford Act–like response organization needed to be overlaid onto the OPA 90 response effort to deal with the sociological aspects of the spill. Because there was no Stafford Act declaration, the effort was carried out under OPA 90 and was funded by BP, the RP in this incident.9 It is conceivable that a similar hybrid response
_____________
9 A responsible party whose expenditures exceed their limits of liability could seek reimbursement from the Principal Fund: in that sense, it remains to be seen what the full effects of the Deepwater Horizon will be on the OSLTF. BP established a $20 billion fund to pay claims—far in excess of the statutory $75 million.
organization would be needed in a future spill, particularly a SONS; however, there does not appear to be any mechanism to fund a hybrid response in cases where the RP is less financially capable.
The Deepwater Horizon response highlighted disconnects between the federal perspective of a Unified Command response under the NCP and state perspectives about state-led emergency response under the Stafford Act. These disconnects were operationally resolved during the Deepwater Horizon event by adoption of the NCP framework, but the potential for future confusion remains because of overlapping jurisdictions and ambiguity in responsibility (USCG, 2011). For Stafford Act–like responses, the OSLTF is probably not a sustainable source of funds. Moreover, the organizational structure under the National Contingency Plan is geared toward spill response. The broader social impacts resulting from a large spill may require a different structure for long-term management. Even though the population numbers in the Arctic are small, the native communities are to a far greater degree dependent upon the quality of their environment. A significant spill can have long-lasting effects on the social fabric of their communities.
ORGANIZATIONS AND INFRASTRUCTURE FOR OIL SPILL RESPONSE
OIL SPILL REMOVAL ORGANIZATION CLASSIFICATIONS
Section 4202 of OPA 90 amended the Clean Water Act to require owners or operators to prepare and submit response plans. These plans have to identify and ensure the availability of personnel and equipment required to remove (to the maximum extent practicable) a worst case spill and to mitigate or prevent a substantial threat of such a spill. The OSRO classification process was established in order to facilitate the preparation and review of these response plans.
The classification process represents standard guidelines that federal agencies and plan developers can use to evaluate an OSRO’s ability to respond to and recover oil spills of various sizes. The OSRO classification process is strictly voluntary, and individual organizations are classified by geographic area and operating environment and by maximum most probable and worst case discharge. Classifications are based on response times, amounts and type of boom, recovery (skimmer) capabilities, temporary recovered liquid capabilities, and vessels. OSROs also have to demonstrate appropriate training programs and equipment preventive maintenance programs, and they may also provide information on dispersants, marine firefighting, and salvage.
The USCG Response Resource Inventory system maintains the OSRO listing. Alaska Chadux and ASRC Energy Services operate in both the Nome and Prudhoe Bay areas of the Western Alaska Captain of the Port, and another two organizations—Clean Harbors Environmental Services and Alaska Clean Seas—operate only within Prudhoe Bay. However, the operating environments within which they are capable of spill response vary widely. ASRC Energy Services operates in the nearshore, with a vessel capable of handling a maximum most probable discharge. Alaska Clean Seas operates in all areas, with facility and vessel responses up to Level 2 for offshore, nearshore, and ocean areas. State-approved oil discharge prevention and contingency plans in Alaska also require Primary Response Action Contractor (PRAC). A company applying for PRAC has to identify the region where their services will be made available, response personnel available, inventory of oil
spill response equipment including dispersants and in situ burn capabilities, significant ancillary resources and equipment, and previous oil spill activities and history of compliance with state and federal environmental laws. There are currently eight PRACs registered for the Northwest Arctic and North Slope regions.
OIL SPILL RESPONSE EQUIPMENT AND RESOURCES
U.S. Coast Guard
Command post locations for the Arctic are problematic due to the scarcity of infrastructure. Moreover, movement of response equipment to the scene of the spill will likely be difficult and time-consuming if not prestaged. The subregional contingency plans note that there is no government spill response equipment prestaged in the Arctic regions of Alaska, although there is industry equipment prestaged in the region. In any event, government equipment is meant as a supplement to the RP’s efforts. The USCG maintains agreements with several spill response companies in Alaska to respond to an oil spill if the responsible party cannot be identified or cannot respond appropriately. Local, state, and industry spill response equipment is staged along the coast for responding to local spills related to exploratory drilling, oil fields, tank farms, and the Trans-Alaska Pipeline. Due to logistical restraints, this equipment does not provide capabilities for all possible spills—for instance, a transiting vessel. With the forecasted increase in shipping through the U.S. Arctic, prepositioning of additional equipment for long-range response capabilities to remote areas may need to be considered by the U.S. Coast Guard and/or the State of Alaska.
The USCG does not have permanently deployed assets in the North Slope area. The nearest cache of significant Coast Guard–owned equipment is in Anchorage. Other prepositioned sites exist in the southern areas of the state but are intended primarily for minor spill response or as a supplement to commercially provided equipment. Logistical support from Coast Guard aviation assets would be provided from Kodiak, which is approximately 1,600 km south of Barrow. In 2012, the USCG conducted the Arctic Shield exercise, which shifted resources from southern Alaska to the Arctic. Two helicopters were deployed to Barrow, national security vessels were brought into the Arctic during the summer months, and an oil spill exercise was conducted.10 Arctic Shield is made possible by accepting tradeoffs in other Coast Guard missions, within the limits of the Coast Guard’s budget (Marcario, 2013). A 2013 Arctic Shield exercise focused on the Bering Strait and western Alaska and included the use of a forward operation location in Kotzebue, in association with the National Guard.11
_____________
10 See http://www.dhs.gov/news/2012/10/11/written-testimony-us-coast-guard-senate-commerce-science-andtransportation.
11 See http://www.d17.uscgnews.com/go/doc/4007/1776075/; http://www.d17.uscgnews.com/go/doc/4007/1843778/;http://www.military.com/daily-news/2013/11/04/coast-guard-completes-arctic-shield-2013.html.

Figure 4.3 Arctic shipping routes, ADEC spill response equipment depots, and villages and towns with the capacity to land passenger jets in Alaska. Map area corresponds to the red box in Figure 1.1. All towns and villages have some spill equipment provided by their respective boroughs. Along the coast, Kotzebue, Nome, and Barrow also have spill response agreements with ADEC. While this map only shows passenger jet landing capabilities, almost all towns and villages have airstrips that can land C-130s.
State of Alaska
ADEC has several prepositioned response equipment depots in Alaska (Figure 4.3). The depots normally provide basic first aid capability in order to allow for timely response to a spill in a particular area without having to wait for outside resources to arrive. None of these packages are located on the North Slope.
ADEC has partnered with local communities to expand and improve oil spill response capabilities and readiness. ADEC has established more than 35 spill response agreements with boroughs and communities, which allow ADEC to request local assistance depending on the needs of a given
incident. ADEC and communities that have signed agreements with them work together to improve preparedness and identify ways to enhance local capabilities through training and additional response equipment. If the local government assists in responding to local incidents, ADEC uses the agreement to allow for reimbursement of expenses and local training.
North Slope and Northwest Arctic Boroughs
The North Slope Borough (NSB) and Northwest Arctic Borough (NWAB) provide spill response equipment to villages in their areas of responsibility to support tank farm operations. While each of the villages has slightly different equipment available, it normally includes bales of sorbents, boom, skimmers, pumps, generators, personal protective gear, wildlife deterrence equipment, liner material, and support material. Shell recently provided additional spill response equipment for NSB.
Alaska Clean Seas
Alaska Clean Seas is a not-for-profit oil spill response cooperative. Its membership includes energy industry companies (oil and gas, pipelines) that plan to or currently work in North Slope oil and gas exploration, development, production, or pipeline transport activities. Its area of operation is Alaska’s North Slope, the Outer Continental Shelf off the coast of the State of Alaska, and the Trans-Alaska Pipeline from Pump Station 1 to milepost 167. Equipment is owned by Alaska Clean Seas and member companies and is located in Prudhoe Bay. Boats in the inventory were designed to respond to incidents in the immediate area and do not have berthing or mess facilities; instead, they are designed to be supported from shore-based facilities. Their equipment includes boom, several different types of vessels, pumps, hoses, skimmers, storage tanks, ISB equipment, and support materials (ACS, 2012).
Alaska Chadux Corporation
Alaska Chadux Corporation is a member-funded, 501(c)(4) not-for-profit oil spill response organization. It is headquartered in Anchorage, Alaska, and provides resources for containing, controlling, and cleaning up petroleum spills for its member companies. Its headquarters and warehouse in Anchorage have resources packaged for rapid transport by land, water, or air. Alaska Chadux Corporation also has equipment at 12 strategically located hubs, including Barrow and Nome. The equipment staged in Barrow is minimal, consisting of boom, absorbent pads and sweep, and wildlife kits.
ASRC Energy Services Response Operations
ASRC Energy Services Response Operations, LLC (AES) was formed in 2006 to build a response capability to support Shell’s offshore exploratory drilling activities in the Chukchi and Beaufort Seas. With the exception of some equipment in Wainwright, their equipment is located
on site during the open water season only. Some of the equipment is available through Shell charter and not directly owned by AES. Their equipment includes boom, response vessels, skimmers, pumps, storage, dispersant, and generators.
There is a significant amount of spill response equipment located in the North Slope, especially when Shell and AES equipment are deployed to support exploratory drilling operations. The majority of the equipment is located in Prudhoe Bay and in the immediate vicinity of oil and gas exploration activities. However, other shoreside facilities to support spill response operations are limited.
U.S. FACILITIES FOR ARCTIC SPILL RESPONSE RESEARCH AND TRAINING
Ohmsett
Ohmsett is the National Oil Spill Response Research and Renewable Energy Test Facility. It is located in Leonardo, New Jersey, and is maintained and operated by BSEE. At over 200 m long, the Ohmsett facility provides one of the largest outdoor saltwater wave/tow tank facilities and has been used for performance testing of a variety of oil spill response options, including mechanical equipment and dispersants under a wide range of environmental conditions and water temperatures. The facility also provides for oil spill research and development of new technologies, such as those that were evaluated during the Wendy Schmidt Oil Spill X Challenge. In addition to this, Ohmsett offers spill response training to personnel from government agencies, industry, and the private sector. They hosted an “Ice Month” in spring 2013 to test mechanical response equipment in broken ice and Arctic temperature conditions and conducted cold-water dispersant effectiveness tests in early 2014 (Ohmsett, 2013, 2014). There are also plans to test Arctic-specific mechanical recovery techniques in 2015 and 2016.
U.S. Army Cold Regions Research and Engineering Laboratory
The U.S. Army Cold Regions Research and Engineering Laboratory (CRREL) is a research facility within the U.S. Army Corps of Engineers’ Engineer Research and Development Center that maintains a particular focus on cold regions. Its mission is to develop solutions to current and emerging problems by advancing science and engineering in a number of technical areas, including biogeochemical processes, infrastructure, environmental fate and transport geochemistry, and hydrology. A key feature of CRREL’s cold weather-related facilities is the Ice Engineering Test Basin, which has been used to support a variety of research and personnel training activities, including those of the U.S. Navy, USCG, and industry. The tank is 37 m in length and may be cooled as low as −24°C. CRREL facilities have also been used by groups, including Alaska Clean Seas, to train personnel on oil detection and response in icy conditions.
OTHER INFRASTRUCTURE
Commercial infrastructure is either limited or absent in the U.S. Arctic. Oilfields around Prudhoe Bay host support service contractors and their equipment. In the event of a SONS and the necessity for rapid deployment of large numbers of responders, passenger jet service (737-scale) is available at Nome, Kotzebue, Barrow, and Deadhorse (Figure 4.3). Smaller aircraft service (19-passenger turboprop) can access nearly all of the approximately 30 coastal communities and other developments (e.g., Red Dog Mine, De Long Mountains Terminal) from Nome to the Canadian border. Almost all of the airstrips can be accessed by C-130 and smaller cargo aircraft if needed for rapid deployment of spill response equipment. Multiple heavy lift aircraft would be needed to bring in capping stack equipment.
Spill responders and other personnel would find a severe shortage of housing, fresh water, food and catering, sewage handling and garbage removal facilities, communications infrastructure, ability to handle heavy equipment, supplies, and hospitals and medical support. Large numbers of response workers also represent an increased risk of accidents and injuries. There are also limited bandwidth and communications capabilities. A single fiber optic cable connects the existing oil fields and there are currently no cables to northwestern Alaska, although a hybrid of fiber optic and microwave repeater towers are planned for the Northwest Arctic Borough. Increased bandwidth capacity is needed to share data and information in the event of an oil spill.
Moreover, recovered oil and oily debris must be collected and disposed of in predesignated locations, or the means to transport the material to some approved location outside of the local area is needed. Given the limited highway infrastructure, planners will inevitably look to aviation and seaborne support for all of these needs. There are no deepwater ports in the two boroughs. Nome has a shallow water port with docks, while other villages have shallow embayments (0-20 ft) without support facilities. The distance from Dutch Harbor, the closest full-service port, to the Shell drilling site in the Chukchi Sea, for example, is approximately 1,600 km. Sea-based support will be limited in its ability to work very close to the shore, due to shallow waters in much of the region, so a contingent of shallow water craft is needed for nearshore operations. Most of this can be contracted commercially, provided through government or military sources (if available), or provided on station by the operator and ready for immediate use. This latter approach was followed by Shell during its 2012 season. Absent this approach, the time delay in bringing adequate capabilities to the scene could be significant.
Infrastructure Assets for Environmental Monitoring
Real-time sea ice and water-column measurements of temperature, salinity, and velocity are needed to understand ocean stratification and surface and subsurface circulation for the fate of spilled oil and for better numerical models of oil spill pathways. Some current observing capabilities are described in this section.
University of Alaska Fairbanks (UAF) infrastructure and instrument assets include shore-based, high-frequency radar (HFR) systems that map surface ocean currents (Weingartner et al., 2013a). Installation sites in Barrow, Wainwright, Point Lay, and Cape Simpson allow for data collection
within 200 km of the coastline over an area of approximately 30,000 km2. Data are fed to the National HF Radar Network12 and are also available from UAF.13 Current vectors are calculated at 6-km spatial resolution and represent velocity in the upper 1 to 2 m of the water column. The systems can only operate during the open water season (approximately July to October), and waves must be present to measure currents. There can be spatial data gaps close to shore, due to the geometry of the coastline. Fully automated solar–wind energy hybrid power modules have been developed to provide power to the HFRs, meteorological sensors, and satellite-based communications. In the case of an oil spill, additional HFR systems could be installed in about three days at remote sites, with plans to create a more portable system that could be deployed in one day. An expansion of the HFR array is being considered, where additional systems could be maintained by local communities (Thomas Weingartner, UAF, personal communication).
Three UAF autonomous underwater vehicles (AUVs) are operating over most of the northeast Chukchi Sea14 and can sample an area for up to four months (see Weingartner et al., 2013b). These gliders presently cannot operate under sea ice cover, as developments are needed for under-ice navigation and through-ice communications. Pilot missions under sea ice will be made in 2014, as well as research missions as part of the Office of Naval Research Emerging Dynamics of the Marginal Ice Zone initiative and the European Union Arctic Climate Change, Economy and Society project. In addition to standard temperature and salinity measurements, AUVs can be equipped with sensors to measure colored dissolved organic matter and chlorophyll, to map ice topography by multibeam sonar, and to compute water velocity.
Instrument systems towed from ships are also used to measure temperature, salinity, and bio-optical properties at high horizontal resolution in the water column and can be used when conditions do not permit the use of AUVs—during strong ocean currents, for example. Additional applications of AUVs and towed vehicles include autonomous mapping of plumes (e.g., sediment, oil) and ice features (e.g., draft, keel depths, bottom scouring), mapping and imagery of hydrographic and bottom features, and incorporating water sampling with biochemical optical measurements for chemical laboratory analysis (e.g., Wadhams et al., 2006; Wilkinson et al., 2007). To supplement these data, moorings anchored to the seafloor can collect water-column measurements, as well as information on overlying sea ice drift and thickness, in one location over seasonal or longer timescales.15
Ice-tethered profilers are automated, drifting ocean profiling instruments that are deployed in drifting sea ice or in open water conditions to sample physical and some biological parameters in the upper water column (to 750 m depth) during all seasons, providing essential data on vertical ocean stratification for assimilation into numerical forecast models (Krishfield et al., 2008; Toole et al., 2010). They transmit ocean data in near real-time from surface buoys, with horizontal resolution on the order of 1 km and vertical resolution on the order of 25 cm. At present, they are deployed in central Arctic Ocean basins, but future ice-tethered profilers designed for shallower profiling depths could provide these data for the shallower Chukchi Sea and boundaries of the Beaufort Sea.
_____________
12 See http://cordc.ucsd.edu/projects/mapping/.
13 See http://dm.sfos.uaf.edu/chukchi-beaufort/index.php.
14 See http://www.ims.uaf.edu/artlab/instruments/gliders.php.
15 See, for example, https://www.whoi.edu/beaufortgyre/.
Real-Time Traffic Monitoring
There is no comprehensive system for real-time traffic monitoring. The capability that comes closest to achieving maritime awareness is that established by the Alaska Marine Exchange, which uses Automatic Identification System (AIS) receivers to track vessels in the strait and along a large percentage of Alaska coastal areas. However, its coverage is not 100%, with significant gaps in northwestern Alaska and along the North Slope (Pt. Barrow and Prudhoe Bay being notable exceptions). Satellite-based AIS reception typically involves a time delay to coincide with overhead satellite passes, versus a continuous real-time display available with terrestrial-based receivers. Antenna placement on vessels may also influence signal receptivity by satellites, since AIS was designed as a line-of-sight terrestrial system. Moreover, the Coast Guard does not have its own AIS receiver system in place for this region and therefore maintains a close relationship with the Marine Exchange. The data from the Marine Exchange supplements its own on-scene presence through seasonal deployments of aircraft and cutters. The Coast Guard is currently evaluating traffic through the Bering Strait in order to determine if an internationally recognized traffic separation scheme is warranted (RADM Thomas Ostebo and 17th Coast Guard District personnel, personal communication, February 4, 2013, and March 18, 2014).
Incident Command Centers and Local Inclusion
The subregional contingency plans recognize the significant challenges for the RP and government to identify suitable Arctic command posts. Based on discussions with federal and state responders, it is very likely that a primary Incident Command Post would be located in Anchorage, which has sufficient infrastructure to accommodate the response effort. This has significant drawbacks in that it would be far removed from the spill scene in an Arctic event. For this reason, responders indicate that it would most likely be necessary to have a forward operating base to exercise tactical control over the effort. This is a reasonable expectation, and would greatly enhance the ability to absorb local expertise into the response effort. Absent a forward command post, local input would be more difficult to access, to the detriment of the overall response effort. An alternative would be to bring local experts to the primary Incident Command Post to enable consultation on a real-time basis, although this would be less desirable in that direct observation of on-scene conditions would be lacking. Fundamentally, the absence of sufficient inclusion of local on-site expertise can easily lead to ill-considered response decisions. Informal discussions with tribal leaders have indicated concerns that they will not be consulted in real time, and that critical decisions will be made in remote locations, using computer modeling, not validated by local knowledge and observations.
Workshops held in March 2013 in Alaska brought together indigenous experts and scientists to discuss ice and ocean conditions in the Beaufort and Chukchi region with respect to oil spill and other incident response (Johnson et al., 2013). The significant value of the collective knowledge of the ice-ocean system was demonstrated, in particular the understanding that local knowledge is essential for response planning. Recommendations of the collaborative study included identification of emergency shoreline staging locations and the ability to provide real-time tracking of very large floes.
INTERFACING WITH LOCAL GOVERNMENTS
The NSB is the nation’s largest municipality in terms of land area. It is a relatively strong home-rule government with a significant physical presence in each of its eight remote communities. In the smaller communities especially, the NSB performs nearly all of the physical infrastructure support, from road and runway maintenance to power plant and water/sewer operations. During storms, floods, or other natural emergencies in or near one of its villages, the NSB has used its heavy equipment fleet to respond. A fleet is kept in operational condition in each of the villages. When compared to the NSB, the NWAB has less of a dominant presence in each of its respective communities. In NWAB villages, physical assets such as heavy equipment, bulk fuel tank farms, and power plants are more likely to be owned and operated by organizations such as the local tribes, school district, or private enterprise. The Alaska Native Corporations also have varying amounts of physical assets that could be of use during an oil spill response. In addition, some of the Alaska Native Corporations are employed by the oil and gas industry for science and data gathering, logistical support, oil spill response, and other support services.
The NSB has a relatively well-developed and staffed Local Emergency Response Planning and Coordination (LERPC) team. Because of its lack of a large operational base, the NWAB does not have as strong a presence in disaster response scenarios, but they are interested in strengthening this capability. The NSB LERPC team has developed a set of scenarios (e.g., catastrophic tank farm failure, aircraft crash, and storm and flood events) that are outlined, updated, and practiced in some form using the ICS structure. For recent emergencies, the NSB, following its LERPC plan, has fielded ICS teams to the nearest affected village. The team typically consists of high-level staff from the NSB Mayor’s Office, Planning Department, Public Safety, Fire, Search and Rescue, and Municipal Services, with public information officers and others taking part. In the 2012 gas blowout of an onshore exploration well near Nuiqsut, the NSB dispatched its team, which was incorporated into state and industry ICS teams to form an integrated multiagency response and command structure. However, there is little connection between the NSB ICS team and industry-supported drills and exercises, which tend to be self-contained. The LERPC team operates more or less independently of the Unified Command structure. Some of this may be attributed to the physical distance between Incident Command Posts and the community-based capabilities. There may also be a technological bias, which places greater emphasis on such tools as computer models and aerial imagery than on subjective experiential information.
In all Alaskan native regions, individual communities look toward elders and other community members with the most relevant experience and environmental and/or traditional knowledge. While they may have no formal role, elders and other experts often direct or assist in efforts at the highest local level. Each Arctic community also has a strong network of volunteers that are typically active in emergency response, search and rescue, and related efforts. Volunteer teams in the North Slope are coordinated with the NSB-supported Emergency Response Planning and Coordination teams.
A regional citizens advisory council, similar to those established in Prince William Sound and Cook Inlet, Alaska (CIRCAC, 2012; Prince William Sound Regional Citizens Advisory Council, 2013), has been proposed by several organizations (National Commission on the BP Deepwater Horizon Oil Spill and Offshore Drilling, 2011). This entity could engage in the planning process
for Arctic exploration, and protect the food supply, health, and culture of Alaska natives. Neither Congress nor the Administration has implemented this recommendation, although it is included in proposed legislation (OSCA, 2013).
HIGH-RELIABILITY ORGANIZATIONS
High-reliability organizations are systems of organizations that deliver high levels of organizational and mission performance in challenging operational settings (Roberts, 1990). These organizations, by nature or design, cannot or must not fail, because the consequences of failure are usually catastrophic. Examples include nuclear power plants, naval command and control organizations, commercial airline operations, chemical process plants, distributed transportation systems, and various facets of health care and medical systems (Grabowski and Roberts, 1999, 2011). Arctic oil spill response operations also have significant mission, safety, and reliability mandates that must be met in the face of events of varying scales and sources, substantial geographic distances, and extreme environmental conditions of visibility, daylight, wind, weather, ice, and snow.
Large-scale, distributed oil spill response organizations in the Arctic are also in many cases virtual organizations—electronically linked, distributed systems of organizations tied together by a common mission and common objectives, whose members may or may not know each other or work together face-to-face (Davidow and Malone, 1992; Grabowski et al., 1997, 2007; Grabowski and Roberts, 1999). Virtual organizations with high-reliability mandates are known as high-reliability virtual organizations—distributed, large-scale systems of organizations, whose members are electronically linked and who share a common value chain and a mandate for mission and safety reliability (Grabowski and Roberts, 1997, 1999; Grabowski et al., 2007; Grabowski and Roberts, 2011).
PREPARING FOR LARGE-SCALE, DISTRIBUTED ARCTIC OIL SPILL RESPONSE
The ability to provide flexible and scalable organizational structures in response to environmental demands is essential for the success of highly reliable virtual organizations, as they must vary their organizational structures from low- to high-tempo operations as environmental conditions change (Roberts, 1990; Harrald et al., 1992). This was demonstrated during the Kulluk operational response (Box 4.1).
INCLUSIVE DECISION MAKING
Highly reliable organizations are known for empowering local decision makers with authority and responsibility for their areas of operation (Roberts, 1990; Grabowski and Roberts, 1996). Inclusion activities permit the development of organizational and cultural trust among all participants (Franken and Thomsett, 2013). The challenge for Arctic oil spill response is to work inclusive decision making into the structure so that the appropriate stakeholder input is included from the outset (Pew Charitable Trust, 2013). Efforts at outreach and inclusivity in Arctic oil spill response preparation and planning have been made by Shell, ConocoPhillips, and Statoil and by state and
Box 4.1 Organizational Lessons Learned from the Grounding of the Kulluk
As mentioned in Box 1.1, Shell’s conical drilling unit Kulluk grounded off Sitkalidak Island on December 27, 2012, after becoming separated from its tow connection. The Incident Command System (ICS) formed the basis for the Kulluk response organizational structures. The Kulluk ICS incident response was expanded to a Unified Command with broadened participation in the Command Center, including local experts, stakeholders, and the media. The initial Kulluk response organization was small, but it grew to well over 500 participants over the course of the response in January 2013. As the event resolved, the size of the response organization shrank. Flexible and scalable organizational structures during the Kulluk response were intentional results of several years of cross-training, simulations and training exercises that predated the actual event, as well as the result of pairing operational personnel with their counterparts from different functional areas during oil spill events. The ease of organizational growth and adaptation seen during the Kulluk response was attributed by a senior observer to system members’ familiarity with the Unified Command System (UCS) and ICS developed over frequent (thrice-yearly) oil spill response drills and in other types of emergency response activities for which the participants were trained: for hurricanes, tsunamis, and even for Y2K events. Both public and private information systems were utilized during the Kulluk event, with public information available to all participants, but private, company-sensitive information only available to a smaller group of decision makers. To provide updates, situational reports, and information to the interested public and the media, many organizations, including federal and state participants, utilized social networking during the Kulluk event. However, social media communication about the event was not integrated in a common platform or display. Traditional media outlets and information sources during the Kulluk event suffered the same lack of integration.
federal agencies (UNOLS, 2013; Young, 2013). In one recent drill, for instance, the Lummi tribe played a substantial role in the Incident Management Team command of a drill in Washington State (Tom Coolbaugh, personal communication, 2013). In addition, an important focus in USCG Arctic Shield 2012 activities was the development of partnerships with native and local stakeholders in order to build the social capital that is critical during emergency and disaster response activities (Young, 2013). During the Kulluk event, local participants joined the Incident Management Team command structure after several days had passed, when it became clearer who would be affected. However, the managing of stakeholder participants has led to recommendations for changes in organizational structures and information availability after the event (ARRT, 2013).
COMMON OPERATING PICTURE
The lack of a common and standard information technology architecture, processes, and software baselines proved highly problematic in the early stages of the Deepwater Horizon oil spill response (Konrad and Shroder, 2011; USCG, 2011). Public confidence in a response effort can be undermined
Scenario 4 Tug and Barge Accident
A barge that operates for part of the year in the Beaufort Sea is being towed out of the Arctic in late October, a time of year when ice formation in the Arctic is under way. It carries nearly 150,000 gallons of diesel fuel and about 10,000 gallons of jet fuel. A severe storm separates the tug from the barge and, despite attempts by the USCG and other dispatched vessels, weather and ice conditions preclude rescuers from being able to reattach towlines. Attempts continue for several days, but ultimately the barge grounds.
Main Considerations
The main issue will be reaching the scene of the incident, which can be hampered by poor weather, low visibility, and possible ice. Secondary considerations include the potential for an oil spill and contamination of the shoreline in remote areas, which will also encounter challenging logistics. Cleanup could extend over the winter months. Also, liability limits will be reached relatively quickly because limits for barges under OPA 90 are less than for ships.
Standard Response
Responsible party assumes leadership role for cleanup, an oil spill removal organization (OSRO) is identified (depending on the tow), and salvage capabilities and response are identified and activated.
Response Needs
Adequate training and exercises for combined or complex events (salvage/personnel rescue/oil spill response) scenarios, resources for potential shoreline contamination cleanup, training and exercises for local response personnel working with Unified Command personnel in winter, and logistics in remote areas are needed.
if consistent, authoritative, and accurate information cannot be provided (Pew Charitable Trust, 2013). A flexible and open common operational platform for gathering, displaying, and sharing data can ease the time spent in responding to queries and resolving data conflicts. Shared and standard information technology architectures and technology are particularly important in highly reliable virtual organizations, as participants are geographically scattered, with varying degrees of access to and understanding of the on-the-ground operational situation. Distributed decision makers linked by large-scale electronic tethers need to develop a shared, common operational understanding and shared mental models of the response requirements and effort as it unfolds. A common operational picture of an unfolding event thus offers a number of advantages to large-scale, distributed Arctic oil spill response. Integrated systems that meld public and private information can provide important, synthesized input to decision makers and can support the development of shared mental models of unfolding operational scenarios, although protecting and disaggregating different participants’ proprietary or sensitive information is a recurrent challenge in distributed, virtual organizations. There is a need for both traditional and nontraditional technology elements (e.g., social media, location-
based services, cloud infrastructure support, mobile applications) and for adherence to international standards for software development, support, and security.
In its Arctic Strategy, the Coast Guard has proposed an Arctic Fusion Center to promote cooperation and coordination; to leverage joint, interagency, and international capabilities; and to enable sustainable development and environmental protection (USCG, 2013b). Protocols such as the European Union’s Common Emergency Communication and Information System and tools such as the Virtual On-Site Operations Coordination Center may provide mechanisms that ease integration and data sharing among nations, agencies, organizations, indigenous people, stakeholders and the public (Arctic Council, 2012). However, additional international protocols and tribal cooperation and agreements will be needed, beyond the resources and capabilities of a single government, entity, or agency, in order to bring together the needed data, information, integration, and dissemination capabilities needed.
CHAPTER CONCLUSIONS AND RECOMMENDATIONS
Conclusion: Marine activities in U.S. Arctic waters are increasing without a commensurate increase in the operations, logistics, and infrastructure needed to conduct these activities safely. U.S. support for Arctic missions, including oil spill response, requires significant investment in infrastructure and capabilities, such as transportation, communication, energy and fuel, electricity, housing/berthing, navigational aids, charting, port access, ice forecasting, ship repair, and salvage.
Conclusion: The United States has bilateral agreements with Canada and Russia regarding oil spill response. Formal contingency planning and exercises with Canada have enabled both the United States and Canada to refine procedures and legal requirements for cross-border movement of technical experts and equipment in the event of an emergency. Exercising the bilateral agreement with Russia will more fully enable both countries to address practical issues that could arise in an actual spill. An active exercise program with Russia, similar to that with Canada, could identify problems and resolve them in advance.
Conclusion: The Russian Federation’s commitment to the economic development of the Northern Sea Route has expanded the volume of large-vessel traffic through the Bering Strait, with greater possibility of a major vessel accident and implications for environmental impacts in U.S. waters. The resolution of anticipated response problems, such as communications between command centers, coordinated planning, transboundary movement of people and equipment, and identification of translators, needs to be accomplished in advance of an actual event.
Recommendation: The USCG should expand its bilateral agreement with Russia to include Arctic spill scenarios and conduct regularly scheduled exercises to establish joint responses under Arctic conditions and should build on existing bilateral agreements with Russia and Canada to develop and exercise a joint contingency plan.
Conclusion: Vessel traffic is not actively managed in the Bering Strait or in the U.S. Arctic, nor is there a comprehensive system for real-time traffic monitoring. The lack of a U.S. vessel traffic monitoring system for the Arctic creates significant vulnerability for U.S. Arctic missions, including oil spill response, and creates undue reliance on private industry and foreign national systems. Private AIS receivers are used to track vessels in the Bering Strait and along a large part of Alaska coastal areas, but there are significant gaps in coverage. Consequently, there are numerous regional “blind spots” where an early indication of elevated risks may not be apparent to officials on shore.
Recommendation: The USCG should expedite its evaluation of traffic through the Bering Strait to determine if vessel traffic monitoring systems, including an internationally recognized traffic separation scheme, are warranted. If so, this should be coordinated with Russia. The USCG should also consider obtaining broader satellite monitoring of AIS signals in the Arctic through government means or from private providers.
Conclusion: The Oil Spill Liability Trust Fund may prove insufficient to cover the sociological as well as economic damages of an affected community. A structure other than the National Contingency Plan may be needed to deal with broader social impacts resulting from a significant oil spill. One approach could be to amend the Stafford Act and the Oil Pollution Act of 1990 in order to enable funding for a “whole government” method if it is determined that the Oil Spill Liability Trust Fund would be insufficient for the purpose. In this case, the National Response Team would need to consider how a response conducted under the National Contingency Plan could blend with a Stafford Act response structure, should the need arise.
Conclusion: The USCG has a low level of presence in the Arctic, especially during the winter. Coast Guard personnel, equipment, transportation, communication, navigation, and safety resources needed for oil spill response are not adequate for overseeing oil spill response in the Arctic. The Coast Guard’s efforts to support Arctic oil spill planning and response in the absence of a dedicated and adequate budget are admirable but not sustainable.
Conclusion: Prepositioning a suite of response equipment throughout the Arctic, including in situ burn and dispersant capability, would provide immediate access to all oil spill countermeasures. In remote areas, prepositioning and maintenance of fuel caches could be critical to extend aircraft and helicopter range. Storage and maintenance needs for prepositioned caches will need to be considered, as will the resources to support them in the long term.
Recommendation: As oil and gas, shipping, and tourism activities increase, the USCG will need an enhanced presence and performance capacity in the Arctic, including area-specific training, icebreaking capability, improved availability of vessels for responding to oil spills or other emergency situations, and aircraft and helicopter support facilities for the open water season and eventually year round. Furthermore, Arctic assignments for trained and experienced personnel and tribal liaisons should be of longer duration, to take full advantage
of their skills. Sustained funding will be needed to increase the USCG presence in the Arctic and to strengthen and expand its ongoing Arctic oil spill research programs.
Conclusion: The absence of infrastructure in the U.S. Arctic would be a significant liability in the event of a large oil spill. It limits the ability to conduct routine operations and maintenance, engage local communities, and develop meaningful area familiarity. There is presently no funding mechanism to provide for development, deployment, and maintenance of temporary and permanent infrastructure. One approach to provide a funding mechanism for infrastructure development and oil spill response operations would be to enable a public-private-municipal partnership to receive a percentage of lease sale revenues, rents, bonuses, or royalty payments that are currently deposited in the federal treasury.
Conclusion: Effective oil spill response requires improved communication bandwidth and networks; transportation systems; environmental and traffic monitoring systems; energy and fuel systems; personnel, berthing, housing, waste and medical support facilities; as well as civil infrastructure development to provide improved port and air access to remote locations using extended supply chains and an increased capacity to handle equipment, supplies, support, and personnel. Strategic development of multiuse facilities (e,g., schools, community buildings, and gymnasiums) would enable them to be used as response control centers. Human and organizational infrastructure improvements are also required to improve international and tribal partnerships so as to leverage scientific and traditional knowledge and best practices.
Recommendation: Infrastructure to support oil spill response should be enhanced in the North Slope Borough, Northwest Arctic Borough, and communities along the Bering Strait,16 with marine facilities for addressing response operations. The scope, scale, and location of infrastructure needs should be determined through structured decision processes, studies, and risk assessments.
Conclusion: Local communities possess in-depth knowledge of ice conditions, ocean currents and potentially affected marine life in areas that could be affected by oil spills. Failure to include local knowledge during planning and response may risk missing significant environmental information, yet there appear to have been only modest efforts to integrate local knowledge into formal incident command-based responses. Developing and maintaining trained village response teams would integrate local knowledge and utilize existing human resources for effective oil spill response.
Recommendation: The USCG and Alaska Department of Environmental Conservation should undertake the development of an oil spill training program for local entities so as to develop trained response teams in local villages. Industry should continue to participate in
_____________
16 The wording of this recommendation was edited after release of the prepublication to explicitly include communities along the Bering Strait.
local training initiatives. Local officials and trained village response teams should be included in the coordinated decision making and command process during a response event. Input from community experts should be actively solicited for inclusion in response planning and considered in conjunction with data derived from other sources. The Coast Guard should set this as an exercise objective in all government-led oil spill response exercises in the Arctic and should set the expectation that industry-led exercises will do the same.
Conclusion: An end-to-end system that integrates Arctic data in support of preparedness, response, and restoration and rehabilitation for oil spills is needed. To achieve this, development of international standards for Arctic data collection, sharing, and integration is required. Interoperability between systems would reduce duplication and increase availability of a common operational picture shared among all participants and stakeholders. A standard architecture that synthesizes multiscale, heterogeneous data from multiple sources, including traditional and local knowledge, is an important next step to address Arctic data challenges. Because a number of U.S. agencies have responsibility for these data and system needs, the Interagency Arctic Research Policy Committee could act as a coordinating body.
Conclusion: Flexible and scalable organization is important to develop an effective Arctic oil spill response. This can be achieved through drills, case studies, simulation, and organizational learning. To build the systemwide capacity to respond to large-scale, distributed Arctic oil spill response, sustained long-term training and continued resource investments are required. Inclusive and trustful communications, relationship building, and decision making, clear accountability, and ongoing assessment and efforts for improvement are also necessary.
Recommendation: Relevant federal, state, and municipal organizations (such as USCG, NOAA, BSEE, the Bureau of Ocean Energy Management, Alaska Department of Environmental Conservation, Alaska Department of Natural Resources, U.S. Fish and Wildlife Service, Alaska Fish and Game, North Slope Borough, and Northwest Arctic Borough), local experts, industry, and academia should undertake regularly scheduled oil spill exercises designed to test and evaluate the flexible and scalable organizational structures needed for highly reliable Arctic oil spill response.
This page intentionally left blank.
































