

2 Environmental Conditions and Natural Resources in the U.S. Arctic
The components of the Arctic system interact with each other in a complex, evolving pattern. This chapter provides an overview of the physical and biological ocean processes and environments of the Bering Strait and the Chukchi and Beaufort Seas. This is important for understanding current conditions, but also for understanding trends, changes, and future data needs. This knowledge is essential to support safe operations in the Arctic marine environment; to guide oil spill prevention, response, and restoration; and to prioritize sampling and monitoring needs.
The chapter begins with a discussion of the physical environment: ocean, marine weather, sea ice, and coastal characteristics and processes—conditions that would be encountered in the event of an oil spill in Arctic waters. A discussion of Arctic ecosystems follows, with an emphasis on biological information that would be important for oil spill response, including monitoring approaches and data needs for incorporation into spill trajectory models or ecosystem models. A final section discusses current research and monitoring as well as additional needs to advance understanding of the Arctic system.
OCEAN PROCESSES AND CHARACTERISTICS
Three principal branches of Pacific origin water (Alaska Coastal Water, Bering Shelf Water, and Anadyr Water; Figure 2.1) enter the Bering Strait and circulate through the Chukchi and Beaufort Seas. The northward transport of water through the Bering Strait is principally driven by large-scale sea level differences between the Pacific and Arctic Oceans, and opposes the prevailing winds; variability in the currents is predominantly wind driven (Weingartner et al., 2005). The summer retreat of ice in this sector of the Arctic has been linked in part to warm Bering Strait inflows and flow pathways (Woodgate et al., 2010).
Water properties in the Chukchi Sea are set by processes of sea ice melt and growth, winds, and inflows of river water and Pacific Ocean via the Bering Strait, as well as from the East Siberian Sea. Transport of water from the Chukchi and shelf regions to the deep Canada Basin takes place mainly through the Barrow and Herald canyons (Weingartner et al., 2005). Currents that flow eastward along the Beaufort Sea continental slope generate eddies that can propagate into the basin interior,
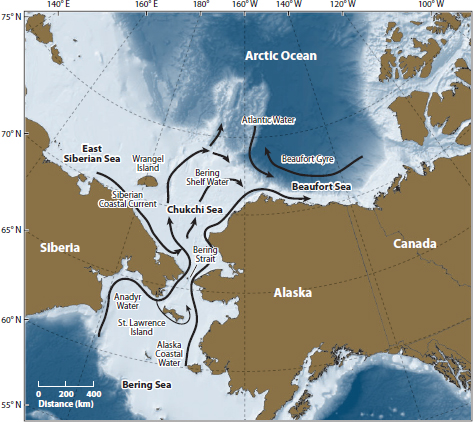
Figure 2.1 Water masses and sea ice extent in Bering Strait and Chukchi and Beaufort Seas. SOURCE: Grebmeier (2012).
and surface wind forcing can also drive water offshore (e.g., Pickart et al., 2005). Transport pathways, seasonal evolution, and mixing of the water masses are outlined in Weingartner et al. (2013b) and references therein.
Weingartner et al. (2005) found that mean flows over the Chukchi shelf are generally less than 10 km/day except in Barrow Canyon, where maximum current speeds can briefly reach 85 km/day. Elsewhere in the Chukchi Sea, maximum currents are between approximately 25 and 40 km/day. The mean flow is north-northeastward over the central Chukchi shelf, opposite to the mean winds. Weingartner et al. (2013a) examined in detail winds and water properties over the central portion of the northeastern Chukchi Sea shelf (40-45 m depth) in summer and fall 2008-2010. They showed that temperature and salinity properties can vary significantly over only a few tens of to a hundred kilometers. Along the shoreline of the Beaufort Sea in open water or loose ice conditions (July to mid-October), surface currents are predominantly wind driven (speeds typically exceed 8 km/day and maximum currents can reach almost 80 km/day, while in winter under fast ice, currents are weak—less than ~2.5 km/day—and forced predominantly by tides) (Okkonen and Weingartner, 2003). Of utmost importance to oil spill response is the rapid variability of the wind-forced surface ocean circulation. High-frequency radar systems in the Chukchi Sea, which map surface ocean cur-
rents, indicate complex flow patterns that can reverse direction in a matter of hours and can vary significantly in both magnitude (0-85 km/day) and direction over spatial scales of less than 10 km.
The Arctic Ocean is strongly stratified, with a fresh, low-density mixed layer up to 40 m deep in the Beaufort Sea. In the summer, very fresh, warm mixed layers only a few meters deep are observed in parts of the Chukchi and Beaufort Seas (e.g., Toole et al., 2010; Weingartner et al., 2013b). This stratification has important implications for the pathways and fate of spilled oil. In the Deepwater Horizon spill, oil plumes rising through the stratified ocean water column spread out at some level of neutral buoyancy and became trapped at depth (Socolofsky et al., 2011). The impact of the strong Arctic Ocean stratification on the subsurface evolution of spilled oil, particularly when surfactants are used (e.g., Adalsteinsson et al., 2013), is an important response planning consideration, as oil that is trapped at depth will not be transported by surface circulation. For this reason, there is a need for characterization and monitoring of Beaufort and Chukchi subsurface circulation, which can be as complex as the surface flow and can be in opposing directions (e.g., Weingartner et al., 1998; Proshutinsky et al., 2009; Morison et al., 2012).
Contaminants residing either in the surface or in the subsurface ocean are subject to redistribution by coastal ocean upwelling and downwelling events; such events have been well studied in the Beaufort Sea (see Williams et al., 2006; Schulze and Pickart, 2012; Pickart et al., 2013). Strong easterly winds have been observed to bring warm, salty deep water to shallow depths along the Beaufort Sea continental slope, with increased frequency of upwelling events in the absence of concentrated pack ice (Pickart et al., 2009). Similarly, downwelling events forced by westerly winds cause the descent of near-surface waters along the coast (Dunton et al., 2006).
Ocean eddies are common in both the Chukchi Sea and the Beaufort Sea (e.g., Manley and Hunkins, 1985; Pickart et al., 2005; Timmermans et al., 2008). Eddies centered at depths ranging from a few tens to hundreds of meters (with horizontal scales from a few kilometers to tens of kilometers) can trap and transport packets of water, or (in the case of a spill) entrained oil, over hundreds of kilometers (Provenzale, 1999; Haller and Beron-Vera, 2013). Satellite measurements reveal that the surface distribution of oil in the Deepwater Horizon spill was influenced by eddies in the Gulf of Mexico, which can extend to 800 m depth (Walker et al., 2011). In addition to larger-scale eddies, there is complicated smaller-scale flow structure (characterized by horizontal scales around 1 km or less) in the ocean mixed layer beneath sea ice in the Beaufort Sea (Timmermans et al., 2012) and in the mixed layer in ice-free conditions in the Chukchi Sea (Timmermans and Winsor, 2013). This small-scale flow field, which is characterized by strong convergence and divergence zones, has been shown to have an important influence on tracer distribution patterns in midlatitude, ice-free regions (Zhong and Bracco, 2013).
Ocean storm surges related to persistent high winds are an important factor for consideration in coastal spill response. Loss of Arctic sea ice has been shown to increase storm surge frequency (Lesack and Marsh, 2007; Pisaric et al., 2011). Extreme coastal flooding from water forced onshore by winds has been documented along the Canadian Beaufort Sea coast (see, e.g., Harper et al., 1988, who show maximum storm surge elevations of 2.5 m above mean sea level recorded at Tuktoyuktuk, Northwest Territories, Canada). These storm surges move ocean water into low-lying coastal environments, bringing salt and contaminants (in the event of a spill) that can have negative impacts on nearshore and terrestrial ecosystems (e.g., Thienpont et al., 2012).
MARINE WEATHER AND SEA ICE PROCESSES
MARINE WEATHER
There are a number of key weather parameters in the Beaufort and Chukchi region that can affect oil spill response, including air and water temperature, winds, low visibility, and hours of daylight. These conditions were highlighted as challenges to oil and gas operations and scientific research in the Arctic by the National Commission on the BP Deepwater Horizon Oil Spill (2011), among others. Figure 2.2 shows a temperature record collected at Barrow over a 5-year period from 1999 to 2005 (Szymoniak and Devine, 2006). Air temperatures are low through most of the year and exhibit little variability from year to year (Figure 2.2).
Stegall and Zhang (2012) analyzed three-hourly North American Regional Reanalysis winds in an in-depth review of wind statistics in the Chukchi–Beaufort Seas and Alaska North Slope region for the period 1979-2009. They found a distinct seasonal cycle, with lowest wind speeds (~2-4 m/s) in May and largest (~9 m/s) in October, with extreme winds (up to 15 m/s) that are most often found in October. An increasing trend in the frequency and intensity of extreme wind events was identified over their study period; 95th percentile winds in October increased from 7 m/s in 1979 to 10.5 m/s in 2009. Wind fields over offshore areas are not always well-captured by coastal station data, which comprise the majority of source data for reanalysis winds. For example, along the North Slope, the significant influence of the Brooks Range in winter and the sea breeze effect from thermal gradients between land, ocean, and ice in summer can lead to stark differences between the coastal and offshore wind regimes. Wind measurements from Pelly Island in the Canadian Beaufort Sea, which may better represent the stronger and more variable Beaufort Sea marine winds than coastal stations to the west (see Manson and Solomon, 2007), recorded peak wind speeds of more than 20 m/s in most months in the period 1994-2008 (Fissel et al., 2009). Wind speed distribution can be used to assess how often a spill response technique such as in situ burning could be used. For example, a general upper wind limit for successful ignition and effective burning in booms or in situ burning is on the order of 10 m/s (Buist et al., 1994).
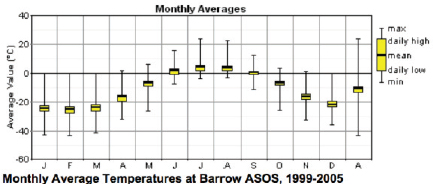
Figure 2.2 Monthly average temperatures at the Barrow Automated Surface Observing System (ASOS) from 1999-2005. SOURCE: Szymoniak and Devine (2006).
Limited daylight can be a major issue for oil spill response during freeze-up and over the winter. Off the Beaufort coast, the maximum of 21 hours of daylight during the breakup season in August reduces to an average of 11 hours in October. However, in practice, twilight can increase the available operational time beyond the hours of sunrise to sunset. From late November to January there is no daylight. Low-visibility conditions in the Beaufort Sea offshore occur most often during the breakup period in July and August. In contrast, the freeze-up period in October has less likelihood of low visibility (Dickins et al., 2000).
The Beaufort Sea wave environment can present a significant challenge to oil spill response. Waves are predominantly generated during the open water season and generally propagate from the east and northeast, although recent analyses suggest sizeable waves now also come from the west (Fissel et al., 2012). For much of the summer (July to August), the close proximity of sea ice is thought to prevent high sea states from forming. However, since 2001, upward-looking sonar measurements in the Beaufort Sea have shown a trend of large waves being present in summer and fall for longer durations, with significant interannual variability in wave heights (Fissel et al., 2012). It has been hypothesized that because of larger fetches in summer, the summer wave field now contributes significantly to a marginal ice zone of broken-up floes along the Beaufort Sea ice edge. After the initial freeze-up in October, wave heights become limited. During open water periods, maximum sea states can be estimated using the Beaufort scale relationship.
The Meteorological Service of Canada has provided a wind and wave hindcast of the Beaufort Sea, covering a 41-year period between January 1970 and December 20101 (see also an earlier study by Eid and Cardone, 1992). The maximum significant wave height over this period in the southern Beaufort Sea was ~9 m, with mean significant wave heights ~1-2 m. Francis et al. (2011) examined significant wave heights in the Chukchi Sea during 1993-2011 and found a 2-2.5 cm/yr increase in significant wave height, which is consistent with increased fetch accompanying sea ice retreat in this region over the same period. It is of note that about 80 km offshore there is good correlation between wave heights determined from moored measurements and satellite observations in the southeast Chukchi Sea, with worse agreement closer than ~10 km to the coastline.
Depending on the time of year, different sets of operating limits can cause interruptions to marine and air activities. From December to March, sea state is not an important factor. Operational downtime is dominated by darkness, snow, and low temperatures. Sea state and temperature are not critical factors from March to June or July; instead, downtime is related to wind and visibility such as fog and low clouds. From August to October, sea state is an important factor, while low air temperature and increasing darkness become critical from late October onward. Box 2.1 illustrates some examples of risk factors in the marine operating environment and demonstrates ways weather parameters can have an impact on marine operations and response.
SEA ICE
Sea ice is a critically important component of the Arctic marine environment, and understanding the ice environment is essential to anticipating the likely behavior of oil in, under, and on ice and
_____________
BOX 2.1 Examples of Risks Associated with Oil Spill Response Due to Weather Conditions
Adverse weather conditions can have impacts on the feasibility of oil spill response, especially in relation to marine and airborne operations in support of the response. This box provides examples of risks associated with particular weather conditions. Actual operating limits are determined by an operator for each installation and piece of equipment.
- Sustained wind speeds greater than 25 knots (~13 m/s) could
- Hinder crane operations and equipment use on response vessels, with a possibility of swinging or uncontrollable loads;
- Limit in situ burning, as a typical wind threshold for successful burn operations is 20 kt (~10 m/s) or less;
- Limit surface dispersant application from vessels and aircraft;
- Limit mechanical recovery operations, such as skimmer deployment and boom containment;
- Hamper small boat operations due to the potential for severe sea states, breaking waves, and superstructure icing; and
- Hinder helicopter approach and landing on offshore helidecks.
- Sea states greater than 1-1.5 m could
- Limit boom effectiveness, as wave overtopping leads to loss of contained oil;
- Impede small boat operation, due to waves, wind, and icing potential;
- Contribute to seasickness and/or fatigue, impacting personal safety and effectiveness; and
- Jeopardize safety on deck from slippery and icy surfaces.
- Visibility that is less than visual flight rules or instrument flight rule minimums (due to weather or season) could
- Limit helicopter landings when cloud ceilings or visibility are below minimum standards set by the Federal Aviation Administration or company policy; and
- Curtail aerial dispersant spraying;
- Limit oil spill monitoring by preventing direct visual observations.
- Extreme cold temperatures (less than −35°C) could
- Impact safety on deck, due to effects from wind chill;
- Impact responder safety because of potential for frostbite;
- Decrease worker efficiency from fatigue, leading to a need for frequent rest breaks;
- Contribute to equipment breakdown due to changes in oil viscosity, hydraulic leaks, or mechanical failure; and
- Limit helicopter operations, which have a lowest acceptable operating temperature set by operators and manufacturers.
determining applicable response strategies. At present, marine operations in the northern Chukchi and Beaufort Seas generally take place from late July to September, but future developments could lead to extended operating seasons or even year-round offshore oil production. Even in the summer, ice can intrude on drilling locations and shipping routes. Furthermore, ice-free regions can transition to ice-covered conditions in a matter of days at the start of fall freeze-up. Sea ice therefore needs to be considered as a possible operating condition for spill response planning. In areas that are of interest to industry, sea ice monitoring is generally performed more consistently and with higher resolution than elsewhere in the Arctic.
This section describes seasonal and spatial characteristics of the Beaufort and Chukchi Sea ice environments in order to set the context for spill response procedures and obstacles in the next chapter. For additional background, the National Snow and Ice Data Center (NSIDC) provides concise descriptions of many key processes in ice formation and decay, as well as the different forms of sea ice2 (recent sea ice conditions are also summarized in Perovich et al., 2013). Worldwide standards for sea ice charting and reporting are maintained by the Joint World Meteorological Organization-Intergovernmental Oceanographic Commission Technical Commission for Oceanography and Marine Meteorology, while the Arctic and Antarctic Research Institute in Russia maintains the current web-based edition of “World Meteorological Organization WMO-IOC Sea Ice Nomenclature No. 259.” Ice concentration, the areal extent of ice relative to open water, is expressed as tenths of ice coverage (e.g., 1/10 = 10% coverage of ice by area).
Sea ice has a complicated seasonal evolution that is a function of seasonal temperature variations and mechanical forcing; its structure and evolution differ significantly from the coastal zone to offshore. Land-fast ice refers to sea ice that is frozen along the shore, partially frozen to the seabed in shallow water (less than 2 m), and largely free-floating in deeper water (typically 15-30 m), where grounded ridges can act to anchor the sheet against drifting pack ice forces. Land-fast ice is most extensive along broad, shallow shelves. Although fast ice along the Beaufort Coast is generally stable near shore after December, severe storm events can cause winter shearing and movement and breakaway events, where large sections drift away from the fast ice edge in deeper water. These events are more common off parts of the Chukchi coast. Beyond the bottom-grounded land-fast ice zone, floating fast ice extends seaward as the season progresses, until it reaches an outer limit within a shear zone (Eicken et al., 2006; Figure 2.3); this zone of often significantly deformed ice can be highly variable in extent but typically occurs between the 15- and 25-m isobaths (also referred to as the Stamukhi zone in traditional Alaskan references such as Kovacs [1976] and Reimnitz and Kempema [1984]). The stable and relatively smooth nearshore areas of land-fast ice (out to approximately 12 m water depth) are used in the Beaufort Sea along the North Slope to construct winter ice roads that routinely carry heavy equipment in midwinter (Potter et al., 1981; Masterson, 2009). Land-fast ice also serves as an important hunting and traveling platform for Arctic coastal communities, as noted by Mahoney (2012).
Drift ice floats freely on the ocean surface without any stable connection to land. Pack ice is drift ice whose concentrations exceed 6/10. The pack can open or close on the order of hours in response to winds and/or ocean currents (Potter et al., 2012). Typical midwinter pack ice drift rates in the
_____________
Beaufort Sea are on the order of 5 km/day (Melling and Riedel, 2004). Ice drift rates can exceed 50 km/day, based on 80th percentile exceedance values published by Melling et al. (2012) from moorings in the Canadian Beaufort Sea. Peak values measured in the same dataset over a 30-minute period reached 1.2 m/s. Even higher short-duration speeds (under 12 hours) are possible along the U.S. Beaufort Sea coast, where the mountain barrier effect of the Brooks Range amplifies offshore east-west winds. The net displacement of ice past a mid-shelf site north of Tuktoyaktuk between mid-October and mid-May was almost 2,000 km in 2007-2008. The actual distance along a drift path, including loops and backtracking, could be larger.
The distinction between fast ice and pack ice and the location of the ice edge at different times in the winter has important implications for oil fate and behavior. Ice features embedded in fast ice are generally static, so oil spilled into this stable ice regime is likely to remain very close to the discharge point (within hundreds of meters) for much of the year. In contrast, oil spilled into a pack ice environment north of the fast ice edge will drift with the ice over time (Wadhams, 1976, 1981; Wilkinson et al., 2007; Dickins, 2011).
In addition to location, the timing of a spill in relation to the sea ice seasonal cycle can control oil behavior and related response options. When sea ice first forms on the ocean surface in the fall, it transitions through a range of stages (depending on atmospheric and ocean conditions)—a growth process that eventually leads to first-year ice, which in a single season may become 1.5 to 2 m thick by late winter (April/May) in the Chukchi and Beaufort Seas (Dickins et al., 2000; Wadhams et al., 2011; Wadhams, 2012a). Oil spilled under growing first-year ice will become encapsulated in a layer of new ice within 12-48 hours, depending on the thickness of the ice, snow cover, and ambient
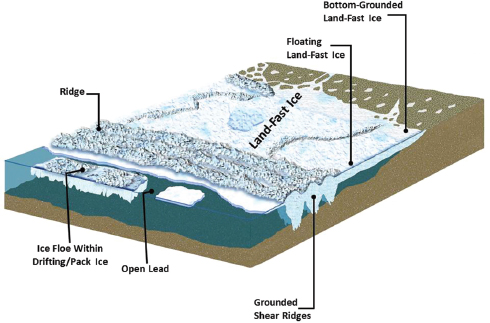
Figure 2.3 Cross-section of typical Beaufort Sea ice zones. SOURCE: Used with permission from University of Alaska Fairbanks, Geophysical Institute.
air temperature. This process has been documented in a series of large-scale field studies (Dickins and Buist, 1999; Dickins, 2011).
In most Arctic areas, the overlying snow layer usually starts to melt in late May or early June and is gone by early July. Meltwater from the snow creates a network of meltwater pools over the ice surface. In first-year ice, oil trapped under or encapsulated within the ice will migrate to the surface through channels left in the ice as the heavier brine drains out. Once on the ice surface, winds will push the oil into thicker patches on the lee side of melt pools that can be ignited and burned (NORCOR Engineering & Research Ltd., 1975; Dickins and Buist, 1981; Brandvik et al., 2006).
Much of the ice cover encountered beyond the nearshore land-fast ice zone is deformed from crushing and shearing or from young ice rafting over itself in the first few months following freeze-up, forming ridges and ice rubble. These processes can create several-meters-thick patches of ice made up of multiple thin sheets. Ridges can extend well over 30 m below the surface and 5 m or more above the surrounding ice field (Tucker et al., 1979; Wadhams and Horne, 1980; Weeks and Hibler, 2010). Monitoring ice thickness is a particularly serious technical question, as current satellite methods are deficient in this area; both CryoSat and ICESat satellite sea ice thickness data are subject to issues regarding validation. Recent progress has been made through the analysis of distributed moored sonar measurements in the Beaufort Gyre region from 2003 to 2012 (Krishfield et al., 2014). Over this period, Krishfield et al. (2014) found an increase in the fraction of ice floes less than 0.3 m thick and a reduction in older, thicker ice floes. A 0.5-m decline in mean ice draft over the 9-year period was observed; most of this decline in sea ice thickness occurred in 2007 and 2008. Even areas of smooth, level ice that have not been subject to dynamic deformations show distinct variations in thickness, with significant undulations or troughs in the underside of the sheet. This spatial variability in ice sheet thickness can increase with time as the ice grows, creating localized areas where large volumes of oil trapped under ice could be effectively contained in relatively small areas (Wilkinson et al., 2007).
Multiyear ice, which has survived one or more melt seasons, can be highly variable in thickness, with a typical maximum of 3-4 m thickness (Wadhams et al., 2011). Multiyear ice is significantly fresher than first-year ice, without a well-defined network of brine channels (e.g., Johnston, 2004). This has implications for oil migration that are not well understood, although it is generally believed that it may take several seasons for oil trapped under multiyear ice to appear on the surface. Limited field tests with actual oil spilled under multiyear floes provide inconclusive results (Comfort and Purves, 1982).
There is a vast historical body of knowledge on the ice environment in the Beaufort Sea, and to a lesser extent in the Chukchi Sea (e.g., Barry et al., 1976; 1979; Kovacs, 1976; Stringer et al., 1980; Dickins, 1984; Reimnitz and Kempema, 1984; St. Martin, 1987; Voelker and Seibold, 1990). Much of this work was completed in the late 1970s and early 1980s, at the peak of the offshore exploration boom in the region. Most reports from that time focus on the morphology and dynamics of fast ice, the shear zone, and seasonal pack ice. Wadhams (2000) and Weeks and Hibler (2010) provide overviews of sea ice knowledge.
The Chukchi Sea was the subject of intense study from 1985 to 1990, related to exploration activity and development proposals from a number of companies. In the early 1990s, interest in transporting gas from the North Slope led to a series of comprehensive studies of ice conditions in
several locations, including Wainwright. Publicly available sources of modern ice information for the Chukchi Sea are limited in comparison with the Beaufort Sea, partly because of the shorter history of commercial interest. Consequently, fewer historical ice datasets are available; older references include the original Alaska Marine Ice Atlas (LaBelle et al., 1983) and studies of sea ice motion and ice ridging (Weeks et al., 1980; Pritchard and Hanzlick, 1987). Recent industry-sponsored reports are generally proprietary to the operators, although modern ice information is available from researchers at the University of Alaska Fairbanks (e.g., Eicken et al., 2006; Mahoney et al., 2007, 2012). Mahoney (2012) notes that the Chukchi and Beaufort Seas have experienced some of the most significant changes in terms of sea ice extent, thickness, and age in recent years (Maslanik et al., 2007; Kwok and Cunningham, 2010). Further discussion of projected changes in timing and extent of sea ice in the Bering and Chukchi Seas is found in Douglas (2010).
Summer ice conditions are highly variable and largely dictated by wind patterns. In the Beaufort Sea, persistent easterly winds tend to move the pack away from shore, promoting extensive clearing along the coast, while westerly winds tend to keep the pack ice close to shore and limit the extent of summer clearing (DF Dickins Associates Ltd. and OASIS Environmental, 2006). In recent summers, ice drift in the Beaufort Sea has exhibited a stronger drift component toward the North Pole, moving ice away from the coast (Hutchings and Rigor, 2012; Mahoney, 2012). Hutchings and Rigor (2012) found this to be an important factor leading to the low sea ice extent in summer 2007. The length of the melt season has increased by over 10 days per decade in the Chukchi and Beaufort Seas over the past 30 years (Markus et al., 2009). Over a 12-year period, the duration of summer open water in the central Chukchi Sea ranged from 8 to 24 weeks (Wang et al., 2012). The average duration of open water in the Chukchi has lengthened significantly on average over the past 30 years. There is also a clear gradation in open water duration with latitude following the retreat of the pack ice edge, from a historical average of 20 weeks or more off Cape Lisburne, to less than 4 weeks north of 72°N. While sea ice extent is at a minimum in the Chukchi-Beaufort region in the latter half of September, ice incursions lasting up to several weeks can occur when the remaining offshore pack ice is driven into shore by sustained westerlies or when remaining thick grounded remnants of the shear (Stamukhi) zone can float free in summer and drift through the region (DF Dickins Associates Ltd. and OASIS Environmental, 2006).
The fall transition from the first appearance of new ice to almost complete ice cover (8/10 or more) nearshore occurs rapidly in the Beaufort Sea, often within a week or less. Initial ice growth along the coast can reach 30 cm within two weeks after the first occurrence of new ice (Dickins et al., 2000). Farther offshore, freeze-up is characterized by the presence of substantial amounts of grease ice (thin layers of clumped crystals on the ocean surface that can resemble an oil slick) or slush before the first consolidated new ice sheet appears. The slush between thicker floes has been observed to significantly restrict oil spreading in leads, maintaining oil in patches thick enough for effective ignition and burning (Buist and Dickins, 1987).
It is important to understand how the different ice regimes develop through the winter in the event that oil remaining from an accidental release remains trapped in the ice after freeze-up. In the winter, the Beaufort Sea pack ice moves in an episodic, meandering fashion with a typical net westerly drift in response to wind and currents. Mean monthly ice speeds reach a maximum in November and December (typically 9-13 km/day) and gradually decrease as the ice pack thickens and becomes more
consolidated through January and February. Mean monthly speeds reach a minimum in March and April, with typical values of 3-5 km/day, although there are long periods (weeks or more) when the offshore ice moves very little or meanders locally at low speeds with no persistent sense of direction (Melling and Riedel, 2004). Average winter ice drift speeds in the Chukchi tend to be significantly greater than in the Beaufort and can exceed 40 km/day for 24 hours or more.
Freeze-up along the Chukchi coast begins in early October off Barrow and progresses south to Cape Lisburne by late October. The offshore ice cover in the Chukchi Sea often takes much longer to consolidate, with open water stretching well into November in many years. Prevailing easterly to northeasterly winds across the northern Chukchi Sea often create an area of open water between the pack ice and the landfast ice, with young ice offshore of the grounded perimeter of the landfast ice zone along the northern Chukchi coast (Figure 2.4).
Frequent winter breakaway events can substantially alter the extent of fast ice along the Chukchi Sea coast in a matter of hours, as floes that can be several kilometers across fracture and drift out into open water stretches. In early winter, the fast ice remains unstable right into the coast until December and occupies a limited extent compared to the Beaufort Sea. In some areas—for example, north of Wainwright—the fast ice is less than 3 km in width, a function of the much steeper bottom slope and lack of broad shallow shelf area due to the presence of the upper Barrow Canyon intersecting the shelf in this region when compared to the shallower, but narrower, Beaufort Sea shelf.
Sea ice dominates the Chukchi Sea from November to early July on average, 4 to 6 weeks shorter than in the Beaufort Sea. Fast ice begins to break up in early June, a month ahead of the Beaufort Sea.
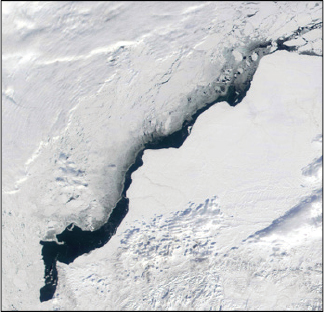
Figure 2.4 Segment of a Moderate Resolution Imaging Spectroradiometer (MODIS) image from March 18, 2002, showing the Chukchi coast from Cape Lisburne (lower left) to Point Barrow (upper right). The broad stretch of open water (dark color) and new ice along the fast ice edge is a characteristic feature of the Chukchi coast during much of the winter in response to prevailing easterly winds. SOURCE: NASA.
By late June, the Chukchi Sea is often close to ice free, while the Beaufort Sea typically remains over 90% ice covered (Eicken et al., 2006; Figure 2.5). Using satellite imagery from 1996-2004, Eicken et al. (2006) determined a mean date of June 4 as the onset of coastal ice breakup, with total clearing being attained on average by June 18, several weeks ahead of the Beaufort coast.
Based on long-term ice chart interpretations, multiyear ice floes in high concentrations (5/10 or more) are rarely found south of Wainwright and very rarely south of Point Lay. Occasionally, old floes have been observed in low concentrations south of Cape Lisburne, but the southern Chukchi Sea is essentially free of old ice throughout the year. Clusters of generally low concentrations of old ice (2/10-3/10 on average) can occur for short periods of time off the northern Chukchi coast from Wainwright to Barrow. Invasions of significant multiyear ice into this coastal area occur approximately two to three times per decade.
Ice charts for the Beaufort Sea and the northern Chukchi coast around Barrow are currently near real time during the summer period. However, there is a need for a consistent level of ice charting for U.S Arctic marine waters. Currently, National Oceanic and Atmospheric Administration (NOAA)
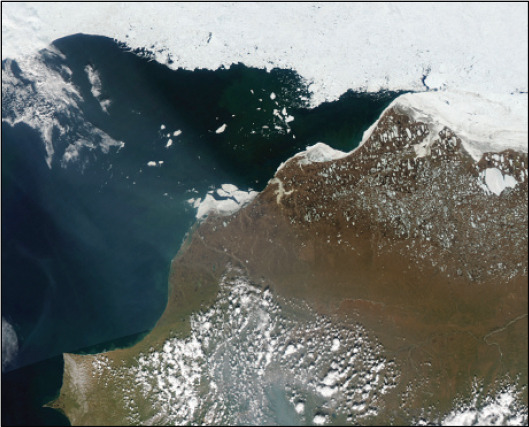
Figure 2.5 MODIS image showing almost complete ice clearing in the Chukchi Sea by June 25, 2005. In contrast, the Beaufort Sea to the east of Barrow (the most northerly point of land in the image) is still choked with very close pack ice. Source: NASA.
Anchorage Ice Desk products and National Ice Center products are not well integrated, with different symbologies and formats. Synthetic aperture radar (further discussed in Chapter 3) could be used for this effort on as frequent a timescale as possible, with higher-resolution coverage in areas of particular significance or interest. A form of accurate ice movement prediction is also needed.
COASTAL PROCESSES AND CHARACTERISTICS
Interactions between terrestrial and marine processes along the Alaskan coast will affect an oil spill’s impacts on coastal, nearshore, and offshore environments. This section focuses on a few of these key forces, which include coastline classifications, transport of freshwater into the marine environment, and the role of permafrost with respect to coastline stability and hydrology.
COASTLINE CLASSIFICATIONS
Detailed mapping of coastlines, including geometry and elevation profiles, and knowledge of sediment size, shoreline stability, exposure to wave energy, and vegetation type are critical to understand potential effects of an offshore oil spill and post-oiling recovery of the coastline and associated habitats or protected environments—tundra, barrier islands, beaches and spits, lagoons, lakes, and deltas.
The northern Alaskan coast consists of four main classifications (Hartwell, 1973). Land erosion coasts and wave erosion coasts together comprise approximately 30% of the coastline. Land erosion coasts have bedrock-based, high-relief sea cliffs, while wave erosion coasts have less relief, with cliffs that expose perennially frozen bedrock and ice-rich sediments. The remaining 70% of the coastline is classified as marine or river deposition coasts. Marine deposition coasts resemble wave erosion coasts, except sedimentation processes along the coast have built beaches, barrier islands, and spits. River deposition coasts, by contrast, are built by fluvial processes. About 45% of the coastline is classified as moderate relief (~2-5 m), comprised of cliffs and scarps of wave erosion and marine deposition coasts. Low-relief features (less than ~2 m), such as beaches, river deltas, barrier islands, and spits, make up about 25% of the coastline. High-relief cliffs (~5-8 m) are found along land erosion coasts and wave erosion coasts, while only a few sea cliffs have very high relief features (greater than ~8 m). Together, these comprise about 25% of the coast. The remainder of the coast is open water, such as river mouths and lakes.
FRESHWATER AND SEDIMENT INFLUX
The annual breakup of Arctic rivers can have great impact on nearshore bathymetry. The rivers draining into the Chukchi and Beaufort Seas are frozen up to nine months of the year, such that almost all of the yearly sediment and freshwater discharge is restricted to short periods in the spring and summer, slightly before and during the spring breakup. In the three-week annual breakup period, the Colville River (the largest river on the North Slope) delivers 43% of its annual discharge and 73% of its total suspended load to the ocean (Arnborg et al., 1967), leading to large areas of flooded
land-fast ice. Ice chunks and river runoff erode nearshore bluffs and tundra, and eventual drainage of the floodwaters through cracks in the ice can create significant seabed erosion. In contrast during the winter, no significant freshwater discharge occurs from the Colville River, and seawater encroaches at least 50 km upstream in the delta (Arnborg et al., 1966).
The great seasonality of freshwater and suspended sediment influx could affect oil movement and entrainment in nearshore and offshore environments. Significant amounts of suspended sediments can be deposited on top of nearshore sea ice during flood events. In the case of an oil spill, these sediments could become contaminated and incorporated into the ice, and later redeposited as the ice breaks up and moves. The introduction of freshwater can also affect ocean currents through changes in stratification. Cross-shore salinity fronts established by river runoff can become unstable, causing energetic cross-shelf flows capable of carrying pollutants far offshore (Weingartner et al., 2009).
PERMAFROST AND COASTAL STABILITY
Like many Arctic coastlines, the North Slope is characterized by a continuous layer of permafrost below an active layer, the top soil layer that freezes and thaws over an annual cycle. Permafrost, a perennially frozen layer of ground material that remains at or below 0°C (32°F) for at least two years, often includes ground ice (e.g, ice lenses, layers, and wedges) that forms when water freezes along edges or cracks (UNEP, 2012). Degradation of this ice-bonded permafrost contributes to the high erosion rates observed along Arctic coastlines (Jones et al., 2008, 2009a,b; Lantuit et al., 2011; Romanovsky et al., 2013).
As measured in deep boreholes, permafrost temperatures may have increased by as much as 2°C to 4°C in the early to mid-20th century (Osterkamp, 2007), and by up to an additional 3°C in the 1980s and 1990s alone (Jorgenson et al., 2010). Some studies report relatively stable permafrost temperatures at the turn of the century, but warming trends resumed after 2007 (Romanovsky et al., 2012). Record high warming was measured at most Alaskan permafrost observatories in 2011 and/ or 2012 (Romanovsky et al., 2011, 2012, 2013).
These warmer permafrost temperatures increase summer thaw and cause the melting of shallow ice wedges, which decreases the mechanical strength of the coastline sediment and causes the ground surface to subside and form depressions. The result is a lower coastal elevation and a terrain referred to as thermokarst (Jorgenson et al., 2010; Romanovsky et al., 2013). These changes, combined with increased wave energy related to increased areas of seasonally ice-free coastal water, elevated sea surface temperatures, and rising sea levels, have resulted in high rates of coastal erosion and greater inundation of low-lying coastal areas by seawater (Jones et al., 2009a,b; Lantuit et al., 2011). Coastal bluffs along Arctic shorelines are exposed to wave energy that carves out niches at the base of frozen bluffs and eventually causes large blocks of the bluff to collapse (Aré, 1988; Kobayashi et al., 1999; Jones et al., 2009a,b; Lantuit et al., 2011).
The U.S. Beaufort shoreline is underlain with continuous permafrost that is estimated to extend out to at least the 20-m isobath (Brothers et al., 2012); it has also been subject to some of the most dramatic erosion in the Arctic (Lantuit et al., 2011). The ice-rich bluffs have been severely impacted by the cycle of thermal and mechanical erosion described above (Jones et al., 2009b).
Between 1984 and 2011, measurements from Deadhorse, Alaska, at a depth of 20 m document a temperature increase of 2.5°C (Romanovsky et al., 2013). Average erosion rates vary from site to site, with higher erosion rates being more typical along western stretches of the Beaufort Sea and lower rates being reported farther east (Jones et al., 2008, 2009b). Jones et al. (2008) found that a mean erosion rate of 5.6 m/yr between 1955 and 2002, although certain sites had erosion rates as high as 25.9 m/yr. According to a study by Mars and Houseknecht (2007), there are data to suggest that the rate of coastal land loss doubled between 1955 and 2005. Jones et al. (2009b) reported similar findings and stated that in a 60-km stretch of coastline along the Beaufort Sea, the mean erosion rate increased from approximately 6.8 m/yr (1955-1979) to 13.6 m/yr (2002-2007). The impact of permafrost degradation on erosion rates in Alaska along the Chukchi shoreline is less well studied than along the Beaufort shoreline. This may be because earlier studies indicated that erosion rates along the Chukchi coastline have historically been less severe than along the Beaufort (Osterkamp and Harrison, 1982). Furthermore, much of the northeastern Chukchi coast is protected by sandy barrier islands, which largely protect the tundra bluffs from erosion.
SHORELINE MAPPING
Rapid coastline erosion, thermokarsting, and inundation make it difficult to establish coastal baseline conditions, and shoreline mapping quickly becomes obsolete. Recognizing the importance of a shoreline inventory, more than 20 partner organizations and agencies created a mapping and classification system, ShoreZone,3 which incorporates low-altitude oblique aerial imagery of Alaska’s coastline. ShoreZone has completed mapping of the Beaufort and Chukchi coastline north of the Bering Strait. However, this information needs to be captured efficiently and repeatedly. The use of Light Detection and Ranging (LIDAR, remote sensing that employs a pulsed laser), unmanned aerial vehicles and gliders, satellite stereo pairs, and other new technologies can be used to collect topographic and bathymetric data of the shoreline at high resolutions and can be periodically repeated.
ENVIRONMENTAL SENSITIVITY INDEX MAPPING
NOAA’s Environmental Sensitivity Index (ESI) mapping is the accepted standard methodology for classifying shoreline types in terms of their sensitivity to oil spills.4 ESI maps allow the identification of sensitive areas for oil spill response planning, as well as response action during a spill. The use of ESI maps in spill response can reduce environmental impacts of oil spills and cleanup activities. A number of such maps have been prepared for Alaska, including the North Slope/Chukchi (prepared in 2005) and the Northwest Arctic (2002).
_____________
3 See http://shorezone.org/.
4 See http://archive.orr.noaa.gov/book_shelf/827_ERD_ESI.pdf.
HYDROGRAPHIC AND CHARTING DATA
NOAA’s Office of Coast Survey creates nautical charts for U.S. coastal waters. Arctic shoreline and hydrographic data are mostly obsolete, with limited tide, current, and water level data and very little ability to get accurate positioning and elevation. The nautical charts are of low quality; many were last updated in the 1950s and contain few soundings, little visual navigation, and small-scale, widely spaced surveys (NRC, 2011). Some were based on data last collected in the 1860s, such as the 1:700,000 chart for Kotzebue that was recently replaced by an April 2012 1:50,000 chart of Kotzebue Harbor (presentation by Doug Baird and Jeffrey Ferguson, NOAA, February 2013). There are also issues with tidal and current data (NRC, 2011). The need for more accurate charting in the Arctic was underscored by Presidential Executive Order 13547 (July 19, 2010), which adopted the Final Recommendations of the Interagency Ocean Policy Task Force, including the need to address “environmental stewardship needs in the Arctic Ocean and adjacent coastal areas in the face of climate-induced and other environmental changes.” Improving navigation and geospatial infrastructure are also goals of NOAA’s Arctic Vision and Strategy (NOAA, 2011). In Canada, 2013-2014 priorities for Fisheries and Oceans Canada and other government departments include improving Canadian Hydrographic Services charting in the Canadian Arctic.5
As a first step, the Office of Coast Survey released an Arctic Nautical Charting Plan (NOAA, 2013). It engaged stakeholders, state and local governments, and other federal agencies to help determine the needs for future Arctic nautical charting (Figure 2.6). The plans also took into account current vessel traffic patterns, through the use of Automatic Identification System data, and anticipated northern sea routes during ice-free periods of the year. In summer 2012, NOAA began its surveys. Soundings from Dutch Harbor to the most northern portion of the U.S. Arctic coast will be used to prioritize future survey needs. One of the priority areas will be a 1:40,000 chart of the Red Dog Mine terminal on Kotzebue Sound. Survey plans for 2013 included a reconnaissance survey from Kotzebue Sound to Point Barrow (presentation by Doug Baird and Jeffrey Ferguson, NOAA, February 2013).
Satellite imagery and photogrammetry will be used to identify shoreline locations, while multibeam and sidescan sonar data will be collected for water depth and identification of seabed features. The Office of Coast Survey is also using bathymetric LIDAR for nearshore depth data, although it was found to have spotty coverage in areas north of the Bering Sea because very clear water is needed for good results (presentation by Doug Baird and Jeffrey Ferguson, NOAA, February 2013). Two projects in southeastern Alaska and Seward Bay have used a combination of multibeam and bathymetric LIDAR for high-resolution charting6 and creation of digital elevation models, respectively (Labay and Haeussler, 2008).
Data from sources outside NOAA could help to fill gaps in data collection. This could include bathymetry collected by other federal agencies (NRC, 1994), academia, or industry. While outside data sources can have problems with quality assurance and quality control, analysis of such data
_____________
5 See http://www.dfo-mpo.gc.ca/rpp/2013-14/rpp-op-po-eng.html.
6 See http://www.fugro-pelagos.com/presentations/Hydro2005_Moyles_Sitka.pdf.
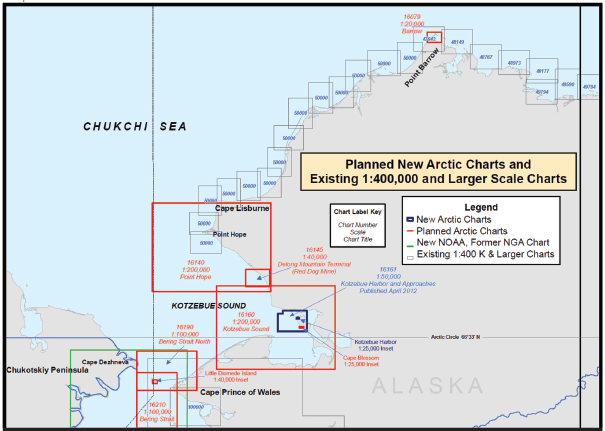
Figure 2.6 Plans for additional nautical charts in the Arctic. SOURCE: Modified from NOAA Office of Coast Survey Arctic Nautical Charting Plan (2013).
could help prioritize regions most in need of updating. NOAA is currently working on guidance to provide to other vessels that might be able to collect data in support of mapping.
Accurate bathymetric charts are part of the infrastructure required for effective oil spill response. The absence of modern charts represents a significant risk to navigation through uncharted obstructions. By extension, shortcomings in nautical charting increase the risk of a vessel-sourced oil spill. Poor charts could also complicate or impede other vessels’ abilities to respond to the accident or spill. If a spill was not entirely contained offshore, the ability of large vessels to come close to shore could be compromised. Given the necessity of marine transportation for oil spill response equipment, responders, vessels, and resources, charting infrastructure that provides for their safe and efficient transit is imperative. Poor charting could increase the cost of an oil spill response, as untrustworthy routes or transits require more comprehensive planning. Finally, poor nautical charts hinder preparedness, which could have negative impacts for oil spill response. Several recent reports have recommended that Arctic charting be prioritized (e.g., NRC, 2011).
ECOLOGY AND COMMUNITY STRUCTURE
BASELINE DATA AND BENCHMARK NEEDS
Describing environmental conditions in the Beaufort and Chukchi Seas is challenging for a variety of reasons. Research in the region has been sporadic, both temporally and spatially. Although there have been environmental studies in the past, systematic and comprehensive data collection only began with the Outer Continental Shelf Environmental Assessment Program in the late 1970s. In addition, the Arctic environmental regime has been changing rapidly over the past four decades, a trend that is expected to continue. Arctic ecosystems are also especially dynamic due to factors such as seasonal and interannual variability and climate change.
In the event of an oil spill, natural resource damage assessments require “baseline”7 environmental data that allow federal agencies to compare any injuries or damages from the spill to pre-spill conditions. Because of these rapid Arctic changes, historical data cannot be relied upon to assess the current status of ecosystems or potential impacts of an oil spill, although they can be valuable for documenting trends. In the Arctic, these “baseline” conditions are shifting; yet the term is sometimes used to describe a static state. For this report, the committee chose to describe observational data that would be needed in the event of an oil spill as “benchmarks,” or reference points over time that can be measured and used to account for data trends and evolving conditions, rather than as a static baseline. “Baseline” is still used when discussing agencies’ activities or reports that use the term.
A recent National Research Council (NRC) study on the impacts of the Deepwater Horizon oil spill discusses the difficulty of determining baselines in a dynamic environment, and suggests that ecosystem models that include both biotic and abiotic components could be developed to measure impacts from a stressor, such as an oil spill, in the context of a shifting baseline (NRC, 2013). Development and testing of these models could also assist in the identification of high-priority research and monitoring needs.
Several types of data have been used to approximate baselines for natural resource damage assessments in past oil spills: (1) historical data from either published or unpublished sources (time series are particularly useful for identifying trends and natural variability); (2) environmental data collected at the time of the spill, but prior to exposure to the spilled oil; and (3) environmental data collected from comparable, unexposed sites in the aftermath of the spill. While progress has been made by the Bureau of Ocean Energy Management (BOEM), industry, the North Slope Borough, and the State of Alaska to fill benchmark data needs, there are still gaps in the information. These are described in later sections. The recent increase in activity related to oil and gas in the Arctic
_____________
7 NOAA and the Department of the Interior (DOI) have very similar definitions of “baseline” as it applies to an oil spill or other hazardous spill for a Natural Resources Damage Assessment. For DOI, baseline “means the condition or conditions that would have existed at the assessment area had the discharge of oil or release of the hazardous substance under investigation not occurred” (43 C.F.R. §11.14(e)). NOAA’s definition of baseline is “the condition of the natural resources and services that would have existed had the incident not occurred. Baseline data may be estimated using historical data, reference data, control data, or data on incremental changes (e.g., number of dead animals), alone or in combination, as appropriate” (15 C.F.R. §990.30).
offshore has led to a push by federal, state, and local agencies, industry, and academia to characterize benchmark information for Arctic species and ecosystems.
In February 2013, the Interagency Arctic Research Policy Committee (IARPC) produced a five-year Arctic research plan for its 14 federal agency partners, which included in its priorities further study of Arctic marine ecosystems and sea ice (NSTC, 2013). BOEM is currently investing approximately half of its research funding on ecosystem studies in the Chukchi and Beaufort Seas (OSCA, 2013).8 In addition, the oil and gas industry routinely collects data for exploration, monitoring, and assessment, although much of it is proprietary. In 2008, Shell, Statoil, and ConocoPhillips initiated a multidisciplinary Chukchi Sea Environmental Studies Program.9 A 2011 agreement between NOAA and those companies created a framework to promote data sharing in the Arctic and led to a release of environmental data from industry to the public through the Alaska Ocean Observing System (AOOS).10
Local communities also collect and analyze environmental information through both traditional and Western methods. Through traditional knowledge, communities pass on information regarding changes in benchmark data such as sea ice, winds, and currents; marine mammal, fish, and seabird abundance, distribution, and health; and sensitive information such as haulout locations, good fishing areas, and culturally important sites (Pew Charitable Trust, 2013). For example, the Northwest Arctic Borough has been working on a subsistence mapping project that identifies important ecological areas for subsistence use, including camp sites and species concentration, and collects them in a secure repository (NWAB, 2011).
SYNTHESIS AND MONITORING
Although research on Arctic ecosystems has increased in recent years, greater integration and synthesis of the observations is needed to make the information more useful for responding to and assessing damages from an oil spill. Several large synthesis projects are currently under way, including the Synthesis of Arctic Research (SOAR)11 and Pacific Marine Arctic Regional Synthesis (PacMARS).12 There have also been recent publications of focused, discipline- or project-specific syntheses (e.g., Bluhm et al., 2010; Hopcroft and Day, 2013). Both SOAR and PacMARS are tasked with integrating the current state of scientific understanding of oceanographic conditions, benthic organisms, lower-trophic prey species (forage fish and zooplankton), seabirds, and marine mammals in the Pacific Arctic, and with providing guidance for scientific research needs in the region. There are a number of database management systems that could be used to integrate and serve these data to interested stakeholders (e.g., the Alaska Ocean Observing System and NOAA’s Arctic Environmental Response Management Application [ERMA]). Spies (2011) recommended
_____________
8 See http://www.boem.gov/Environmental-Stewardship/Environmental-Studies/Alaska-Region/Alaska-Studies/index.aspx.
9 See http://www.chukchiscience.com/.
10 See http://www.aoos.org.
that ongoing species-specific synthesis projects be integrated into a regional ecosystem synthesis, and that monitoring activities across different programs and agencies be coordinated for better efficiency.
Long-term monitoring data provide the best opportunity for tracking ecosystem change and determining benchmarks or baselines for natural resource damage assessments13 and other purposes. Long-term monitoring needs for the Arctic include habitat use and parameters; abundance, distribution, and health of fish, invertebrates, seabirds, and marine mammals; contaminant concentrations and toxicity evaluations; and subsistence and other human uses (presentation by Mary Baker, NOAA, June 2013). There are different strategies for monitoring, but a few basic tenets apply, especially in areas where sampling can be difficult or expensive. A program cannot monitor everything, everywhere, at all times; instead, a prioritization scheme needs to be determined. One approach for this is to select sentinel species and habitats for regular monitoring. Research on major dynamic processes would inform ecosystem models and help identify essential links in the food web, including prime candidates for sentinel species. Prioritization of future monitoring and research is an essential step for establishing benchmarks. In all instances, it will be essential to incorporate and complement existing monitoring—for example, monitoring of marine mammals for other purposes (such as the Marine Mammal Protection Act).
Monitoring higher-trophic-level species contributes to knowledge about potential changes in lower trophic levels. Changes in prey items (e.g., a shift from benthic to pelagic prey) or in lower trophic productivity (e.g., shifts in species composition or in timing of phytoplankton blooms) can be understood by studying habitat use and food consumption. For mammals, dietary shifts could be monitored through analysis of fatty acids in blubber (Budge et al., 2008; Loseto et al., 2009), stable isotopes in a variety of tissues (e.g., S.H. Lee et al., 2005), scat, or stomach contents from subsistence harvests or stranded animals (Lowry et al., 2004). For example, a 2013 paper analyzing the scat of polar bears revealed prey switching and reflected a change from foraging on sea ice for seal pups to foraging on land for snow geese, goose eggs, and various plant materials (Gormezano and Rockwell, 2013). Monitoring at lower trophic levels can be more streamlined, targeting specific habitats or seasonal trends to optimize monitoring frequency and timing.
Monitoring the diet and distribution of large marine mammals can also indicate the location of important habitats. For example, aerial surveys of gray whales have shown a linkage to areas with high concentrations of benthic amphipods in Barrow Canyon, between Barrow and Wainwright (Moore et al., 2000). Furthermore, concentrations of walruses have been observed in the area of Hanna Shoal, where the benthic community is dominated by gastropods, bivalves, and polychaetes (Schonberg et al., 2014).
BERING STRAIT AND CHUKCHI AND BEAUFORT SEA ECOSYSTEMS
The Chukchi and Beaufort Sea ecosystems have high benthic production in contrast to temperate ocean ecosystems, which are typically dominated by pelagic production. Zooplankton grazing consumes a smaller proportion of phytoplankton (e.g., Campbell et al., 2009; Sherr et al., 2009) with much of the remainder sinking to the seafloor, where it supports a robust benthic community. The
_____________
benthic macrofauna—dominated by polychaetes, bivalves, and amphipods—are a major prey source for seals, walruses, diving birds, and some whales. Fish biomass in the Chukchi Sea is relatively low compared to the Bering or Barents Seas, a reflection of lower zooplankton density, higher export of primary production to the benthos, and possibly the colder water regime (Hunt et al., 2013). Food chains are relatively short, such that disruptions to the lower trophic level quickly cascade to higher-trophic-level species (Grebmeier, 2012).
Several characteristics of these ecosystems make them sensitive to a warmer climate and to earlier melt, breakup, and retreat of sea ice. For instance, the spring phytoplankton bloom is important for zooplankton, including larvae of the resident benthic invertebrates; however, the bloom timing and location depend on sea ice melt and breakup, as well as the seasonal increase in daylight. As the sea ice dissipates, stratification from meltwater keeps nutrients in the surface waters, while sunlight penetrates deeper into the water column. For many species, sea ice is an essential part of the habitat. At the bottom of the food web, ice algae provide a major source of primary production (Gosselin et al., 1997). In the higher trophic levels, walrus and polar bears depend on sea ice as a platform to access rich feeding grounds offshore, and some birds and seals rely on sea ice for nesting areas and rookeries. For these species, a change in timing could disrupt the sequence of trophic interactions and redistribute productivity, potentially shifting some production from benthic to pelagic communities. Warming and earlier retreat of sea ice could also favor the migration of North Pacific species into the Arctic Ocean, which could potentially disrupt existing ecological relationships.
Given the environmental variability of Arctic ecosystems, assessing potential impacts of an event such as an oil spill requires understanding the ecosystem components and how they are intertwined. Food web models can provide one such approach. For example, a preliminary food web mass balance model of the eastern Chukchi Sea illustrates some of the known species relationships in this ecosystem, especially the outsize contribution of the benthic species at the base of the system (Whitehouse, 2013; Figure 2.7).
Lower Trophic Levels
Microbes perform critical biogeochemical functions in the ocean, from primary production and nitrogen fixation to remineralization of organic materials. Microbial photo- and heterotrophs are the dominant biomass of the Arctic Ocean, forming the base of the food web and nutrient cycles. Small eukaryotic phytoplankton dominate, such as picoplanktonic green flagellates and microplanktonic diatoms. Notably, phytoplankton with smaller cell sizes have been replacing those of larger sizes in the past decade (Li et al., 2009). In comparison to temperate and tropical oceans, cyanobacteria are much less abundant (Synechococcus) or undetected (Prochlorococcus) in the Arctic Ocean (Cottrell and Kirchman, 2009; Vincent and Quesada, 2012).
Heterotrophic bacterial populations found in Arctic seawater perform the essential function of recycling nutrients through decomposition of organic materials. Populations resemble those from temperate waters, with Alphaproteobacteria, Flavobacteria/Bacteroidetes, Gammaproteobacteria, and Verrucomicrobia constituting more than 90% of communities (Comeau et al., 2011; Teske et al., 2011; Ghiglione et al., 2012).
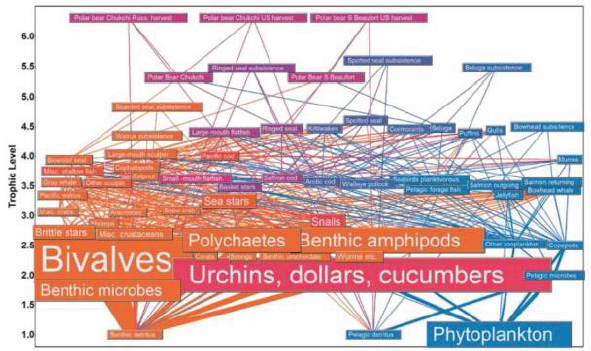
Figure 2.7 Visualization of the eastern Chukchi Sea food web. SOURCE: NOAA Alaska Marine Fisheries Science Center (2012).
Seasonal changes in microbial abundance and distribution have been observed. Prokaryote abundance in seawater decreased fourfold in the Beaufort Sea from summer to winter, but no significant seasonal shift in abundance was observed in the Chukchi Sea (Mrinalini et al., 2012). There was no observed pattern in seasonality or distribution of the major bacterial groups in either region. The community of organisms within brine channels (viruses, bacteria, algae, and small invertebrates) are exposed to fluctuating and physiologically challenging salinity conditions during ice freezing and melting (Gradinger and Zhang, 1997; Faksness et al., 2011).
In addition to the rich microbial community, regions of the Chukchi Sea have some of the highest rates of primary production observed (Arrigo et al., 2012). A continuous influx of nutrients through the Bering Strait, as well as upwelling in Barrow Canyon, sustains high levels of primary production (Sambrotto et al., 1984; Springer et al., 1996; Macdonald et al., 2004). The production and standing stock of phytoplankton changes within and between open water seasons (Kirchman et al., 2009).The first seasonal phytoplankton blooms are associated with sea ice retreat, when the availability of light increases and stratification keeps nutrients in the surface waters (Grebmeier, 2012). Peak phytoplankton growth and reproduction match the timing of sea ice degradation and persist for about two weeks (Cooper et al., 2011). Therefore, earlier sea ice retreat, as seen in recent years, will affect spring phytoplankton blooms (Grebmeier, 2012). The spring blooms provide essential food supporting the early zooplankton growth, but much of the primary production from phytoplankton occurs throughout the ice-free areas during the summer season. In addition, not all
primary productivity is dependent on open water blooms. Phytoplankton are transported to the Chukchi from the Bering Sea (Hopcroft et al., 2010), and blooms occur beneath pack ice in the Chukchi Sea because light transmission increases due to thinning of the ice cover and proliferation of melt ponds (Arrigo et al., 2012).
The dramatic blooms of phytoplankton support approximately 350 species of zooplankton in the Arctic, with distributions determined primarily by currents. Oceanic species are dominant in the basin, Arctic species are dominant in the Beaufort Sea, and Pacific species are transported northward through the Bering Strait into the Chukchi Sea. There is a lengthy history of zooplankton sampling in the U.S. Chukchi Sea (Hopcroft et al., 2010), which although sporadic is nevertheless useful for environmental impact assessments and climate research. Zooplankton assemblages are linked to water mass characteristics of temperature and salinity (Hopcroft et al., 2010), with higher abundance and biomass when there is less sea ice (Matsuno et al., 2011). High seasonal and interannual variability in abundance and community structure appears to be normal, a consequence of variability in sea ice retreat and sea surface temperature (Questel et al., 2013). Warmer seawater temperatures in the Arctic could increase grazing rates (Coyle et al., 2007). Reduced sea ice could also allow invasion of Pacific species that might be unable to survive the Arctic winter (Grebmeier, 2012). Increased zooplankton would affect not only the pelagic ecosystem in the Arctic, but also the benthos. Either the unconsumed zooplankton would be deposited on the bottom, enhancing the benthos as unconsumed ice algae currently does, or the enhanced zooplankton would support a shift to a more pelagic community structure than is currently seen in the Chukchi Sea, decreasing export to the benthos and reducing benthic productivity.
Benthic Organisms
There are currently several projects studying benthic macrofaunal invertebrate species (>0.5 mm) in the Beaufort and Chukchi Seas. Both seas were the subject of broad-scale studies in the 1970s. Sampling in the northeastern Chukchi Sea was conducted in the mid-1980s through the present (Grebmeier et al., 1989; Feder et al., 1994; Grebmeier, 2012; Blanchard et al., 2013). There have also been some recent site-specific studies in the Chukchi Sea (Blanchard et al., 2013) and the Beaufort Sea (Dunton et al., 2012). While the broad-scale studies have provided some information on diversity and trends in the region, spatial and temporal variability and limited coverage are not sufficient to create benchmarks to assess impacts from a spill.
In general, macrofaunal assemblages are dominated by deposit-feeding polychaetes and bivalves; in some regions there are dense amphipod beds, such as those in the gray whale feeding area near Barrow Canyon (Blanchard et al., 2013). In addition to larvae from resident populations, the Chukchi Sea receives North Pacific and coastal Alaskan larvae that have been advected north through the Bering Strait.
In the epibenthos, many of the fauna are mobile and can move away from oil pollution related to a spill, but those that are sessile cannot remove themselves from contaminated sediments. Data on epibenthos are collected through trawls, video imagery, and still photos; lack of gear standardization makes comparability an issue across studies. The overall data coverage is low, although there
have been several large programs in both the Beaufort Sea and Chukchi Sea since 2000 (Bluhm et al., 2009; Iken et al., 2010; Blanchard et al., 2013), as well as time series in the northern Bering Sea (Grebmeier et al., 2006). For the epibenthic species, it is generally assumed that abundance, composition, and biomass would not change drastically due to an oil spill, unless it occurred during a recruitment phase or a critical part of the reproductive cycle. However, there are still some basic questions regarding epibenthos, including seasonality. While none of the species discussed are commercially harvested, changes to populations due to warming temperatures could lead to impacts on species with subsistence or potential commercial value (e.g., crab, sea urchins, and sea cucumbers). In addition, the epibenthos provides important prey species for walrus and bearded seals.
Fishes
There is only sparse benchmark information regarding northeastern Chukchi Sea ecosystems and Arctic marine fishes (Figure 2.8; Johnson, 1997; Power, 1997; Mecklenburg et al., 2002, 2008). Because the Alaskan Arctic does not contain commercial fisheries (Zeller et al., 2011), there exist no historical commercial fisheries’ harvest data from which benchmark data might be reconstructed. Fish-trawl research surveys conducted by NOAA’s National Marine Fisheries Service do not occur as far north as the Chukchi Sea. Over the past five decades, fewer than 30 research cruises have collected information on the demersal (bottom-dwelling) fish communities in the eastern Chukchi Sea; of these, only 16 cruises have sampled north of 70°N (Norcross et al., 2013a). Arctic cod (Boreogadus saida) was the most abundant demersal (Alverson and Wilimovsky, 1966; Frost and Lowry, 1983; Barber et al., 1997) and pelagic (Eisner et al., 2012) species captured in the western Arctic. The same fish families are found to dominate the northeast Chukchi Sea—cods (Gadidae), sculpins (Cottidae), eelpouts (Zoarcidae), and righteye flounders (Pleuronectidae) (Norcross et al., 2013a). In fish surveys in limited areas of the northeastern Chukchi Sea in 2009 and 2010, Arctic cod was the most abundant species, and the dominant families were cods, sculpins, and pricklebacks (Norcross et al., 2013b), with only small-scale spatial differences shown in fish communities.
Fish in certain coastal areas of the U.S. Arctic have been relatively well studied. A 25-year study on Arctic cisco (Coregonus autumnalis), an anadromous whitefish and important subsistence resource, and other species occurred near the Endicott Causeway in the central Beaufort Sea, near Prudhoe Bay (Gallaway et al., 1983, 1997; Fechhelm et al., 1994, 2009). There has been considerable monitoring of Arctic cisco and subsistence fishing in the Colville River Delta (Moulton et al., 2010; von Biela et al., 2011). The North Slope Borough has conducted fish and subsistence surveys in and adjacent to Elson Lagoon.14 These studies provide a baseline of the presence and relative abundance of nearshore fishes, including whitefish/cisco, salmon, sculpin, capelin, Arctic cod, saffron cod, rainbow smelt, and other species. Subsistence surveys have provided additional information about fish that are important for local communities.
In the Beaufort Sea, few historical data exist for offshore marine fish populations. In 1976 and 1977, bottom-trawl surveys were performed from offshore of Icy Cape northward in the Chukchi Sea into the western Beaufort Sea (Frost and Lowry, 1983). Fish collections in federal waters outside the
_____________
14 See http://www.north-slope.org/departments/wildlife/Fish.php.
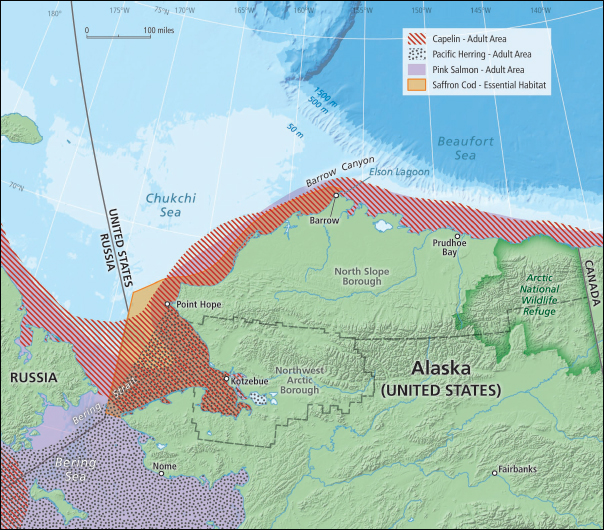
Figure 2.8 Distribution of select fish species in U.S. Arctic waters. Select locations discussed in the text are also shown on the map. Map area corresponds to the red box in Figure 1.1. Data from Arctic ERMA, attributed to Audubon Alaska.
barrier islands consist of a few trawl samples taken in a 1989-1990 Minerals Management Service survey, collected very near the barrier islands and less than 30 km off the coast (Thorsteinson, 1992). However, the Beaufort Sea Outer Continental Shelf Planning Area extends from three nmi seaward across the 100-km-wide shallow shelf. It is unknown whether the limited historical data capture present conditions, especially as the geographic occurrence and trends in subsistence harvests may be changing. Fish assemblages and populations in other marine ecosystems off Alaska have undergone observable shifts in abundance and diversity over the past 20-30 years (Anderson and Piatt, 1999). A 2011 cruise across most of the Beaufort Sea shelf revealed that Arctic cod was the most dominant species of fish. Cods (Gadidae) and sculpins (Cottidae) were among the most abundant families on both the Chukchi and Beaufort Sea shelves (Norcross et al., 2014). A recent BOEM-funded study
is assessing new data on fish species composition, distribution, relative abundance, and life history characteristics across 400 miles of the Beaufort Sea straddling the U.S.–Canada border (BOEM, 2013). Camden Bay is a focal area because of oil exploration and potential development in the area.
Marine Birds
Many species and individual birds occur in and adjacent to the Chukchi and Beaufort Seas (Figure 2.9). They include typical seabirds (e.g., loons; procellarids, such as short-tailed shearwaters [Puffinus tenuirostris], northern fulmars [Fulmarus glacialis]), alcids (e.g., murres, puffins, guillemots), larids (e.g., gulls, terns), shorebirds (including phalaropes and those using nearshore and lagoon
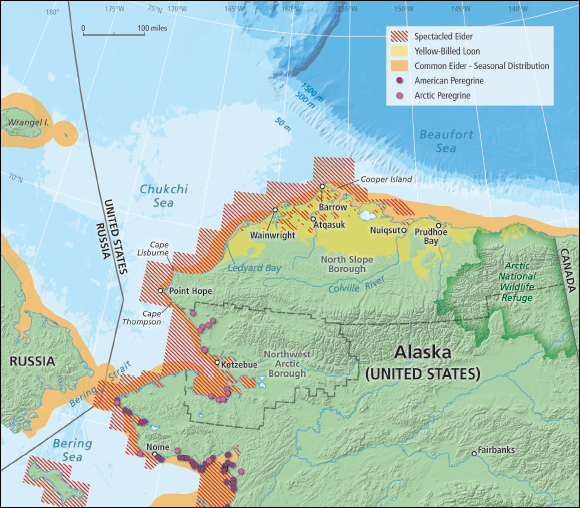
Figure 2.9 Distribution of select bird species found in the U.S. Arctic. Spectacled eider are listed as threatened under the Endangered Species Act. Select locations discussed in the text are also shown on the map. Map area corresponds to the red box in Figure 1.1. Data from Arctic ERMA, attributed to Audubon Alaska (common eider and yellow-billed loon) and NOAA (spectacled eider, American and Arctic peregrines).
habitats), and waterfowl (e.g., eiders, black brant [Branta bernicla]). Surveys of these species have occurred through nest colony work, migration counts, aerial surveys, and at-sea surveys.
The largest seabird colonies occur at Cape Lisburne and Cape Thompson. The U.S. Fish and Wildlife Service (USFWS) and U.S. Geological Survey (USGS) have studied murres, kittiwakes, and other birds at those colonies for many years (e.g., Springer and Roseneau, 1978; Springer et al., 1980), although data are limited for monitoring trends of the populations. The primary seabird colony in the Beaufort Sea is at Cooper Island, where black guillemot (Cepphus grylle) have been monitored since 1975 (Divoky, 1998) and continue to be observed every summer (Divoky and Harter, 2010). A great deal is known about colony size and trends, demography, nesting success, chick provisioning, behavior, and response to climate change (Divoky, 1998; Harter, 2007; Moline et al., 2008). Other birds nest along the barrier islands, including Arctic (Sterna paradisaea) and Aleutian (S. aleutica) terns, glaucous gulls (Larus hyperboreus), Sabine’s gulls (Xema sabini), common eiders (Spectabilis mollissima), long-tailed ducks (Clangula hyemalis), and a variety of shorebirds and songbirds. Some foot surveys for nesting birds have been conducted along the barrier islands (Divoky, 1984; Moitoret and Suydam, 1997), as have aerial surveys in nearshore and lagoon habitats (Johnson, 1993; Johnson et al., 1993; Lysne et al., 2004). Shorebirds have recently been surveyed during premigratory staging in late summer and early autumn along the coasts and deltas of the Beaufort Sea and northeastern Chukchi Sea (Powell et al., 2010).
Adjacent tundra habitats support a diverse bird community. Those birds have been monitored primarily through annual aerial breeding-pair surveys (e.g., Larned et al., 2012; Ritchie et al., 2013), but many site-specific studies have been conducted by federal, state, and local agencies; the oil and gas industry; universities; and non-governmental organizations. The site-specific surveys document population densities and habitat use (e.g., Liebezeit and Zack, 2010; Johnson et al., 2013), breeding biology (e.g., Bentzen et al., 2009; Safine, 2013), and other aspects of the biology of Arctic birds.
Movement and habitat use of larger birds (e.g., loons, eiders, and gulls) have been documented through the use of satellite tagging (Phillips et al., 2006, 2007; Oppel et al., 2009; Phillips and Powell, 2009; Troy, 2010; Schmutz, 2012). Offshore, at-sea surveys for seabirds have included sampling programs between 1975 and 1991 (Divoky, 1987) and 2007 and 2012 (Gall and Day, 2011; Gall et al., 2012). The 2007-2012 program was focused primarily on areas of interest for Chukchi Sea oil and gas exploration. Substantial variation in numbers of individuals and species was seen between the two time periods. These limited data suggest a shift in the seabird community from fish-eating to plankton-eating birds (Gall and Day, 2011; Gall et al., 2012). New approaches to collect observations include the use of high-resolution video surveys from overflights, which are more accurate and repeatable. However, they are less likely to identify or distinguish certain types of birds (presentation by Adrian Gall, ABR, Inc., March 2013).
Audubon and Oceana have identified globally important areas in and around the Chukchi and Beaufort Seas, using colony information, nearshore surveys, at-sea data, and expert opinion (Smith et al., 2012; Christopher Krenz, personal communication, 2013). These areas are important for nesting and foraging for a substantial portion of the global population of a variety of species. Furthermore, Ledyard Bay (northeast of Cape Lisburne) has been designated as critical habitat for threatened spectacled eiders (Somateria fishceri) because the area is important for staging, molting, and possibly foraging. Ledyard Bay is also important for king eiders (Oppel et al., 2009), where these two eiders
may be foraging on bivalves or other shellfish (Petersen et al., 1998; Suydam, 2000). The North American breeding population of Steller’s eiders (Polysticta stelleri) is also listed as threatened. They primarily nest between Barrow, Atqasuk, and Wainwright and migrate there from wintering areas in the southeastern Bering Sea. Very little is known about how Steller’s eiders use the Beaufort and Chukchi region, although they likely migrate through and stage in nearshore areas.
Population status of most waterfowl and other larger birds is documented through aerial surveys (Larned et al., 2012; Ritchie et al., 2013) and migration counts (Quakenbush et al., 2009). Most species are stable (e.g., Pacific loons, spectacled eiders, long-tailed ducks) or increasing (e.g., greater white-fronted geese [Anser albifrons], tundra swans [Cygnus columbianus], lesser snow geese [Chen caerulescens], black brant [Branta bernicla], yellow-billed loons [Gavia adamsii]), while a few appear to be declining (e.g., red-throated loons [Gavia stellata], mallards [Anas platyrhynchos], green-winged teals [Anas crecca]). For other birds, such as most shorebirds or songbirds, little is known about population trends, and colony data for most seabirds are not standardized or precise enough to determine trends.
Marine birds in this region are likely to be impacted by climate change, which may lead to a mismatch between the timing of food availability and needs (Moline et al., 2008). These shifts may result in changes to the species that make up bird communities in the Chukchi and Beaufort Seas (Stralberg et al., 2009). Although there is some information on marine birds, numerous data gaps and information needs abound. Key among these is a better understanding of how climate change may impact individual species or populations, as well as the entire bird community. To understand these impacts, or those from an oil spill, key data needs are population trends, distribution, and health and body condition.
Marine Mammals
Considerable research has occurred on marine mammals in the Chukchi and Beaufort Seas, due largely to their importance to the subsistence economies and communities of northern Alaska, but also because many species are listed under the Endangered Species Act. Additionally, they engender a great deal of interest and concern among the general public. The following is an overview of what is known about marine mammals in northern Alaska. Additional details can be found in numerous publications (see BOEM [2013] for ongoing and newly funded studies) and in stock assessment reports regularly updated by the U.S. National Marine Fisheries Service and the USFWS.15
There are a variety of marine mammals in northern Alaska. Of the cetaceans, bowhead, gray, and beluga whales and harbor porpoises are commonly found (Figure 2.10). Fin, minke, humpback, and killer whales and narwhals are only occasionally found in the Chukchi and Beaufort Seas; however, sightings of these species seem to be increasing due to changing Arctic conditions. Four species of ice seals (i.e., bearded, ringed, spotted, and ribbon), walruses, and polar bears are found regularly off northern Alaska, while Steller sea lions, northern fur seals, and other pinnipeds are rarely seen (Figure 2.11). Bowhead and beluga whales are well adapted for living in the ice and can be found in the Beaufort and Chukchi Seas from approximately April to October/November. Other cetaceans and most pinnipeds are primarily seen during the open water season, although ringed seals, bearded
_____________
15 See http://www.afsc.noaa.gov/techmemos/nmfs-afsc-245.htm.
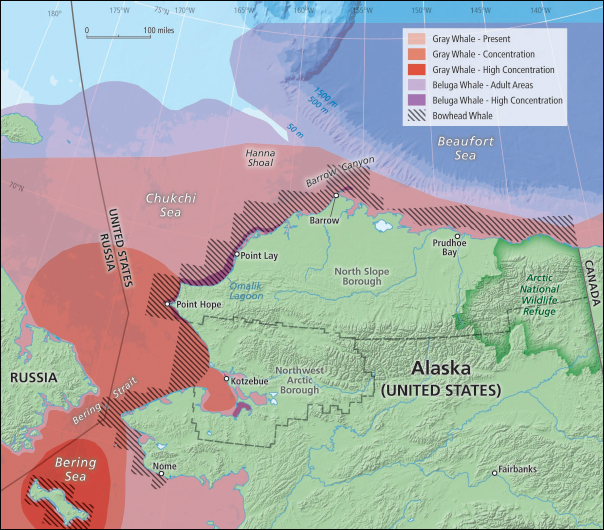
Figure 2.10 Distribution of whales in U.S. Arctic waters. Select locations discussed in the text are also shown on the map. Bowhead whales are listed as endangered under the Endangered Species Act. Map area corresponds to the red box in Figure 1.1. Data from Arctic ERMA, attributed to Audubon Alaska (gray and beluga whales) and NOAA (bowhead whales).
seals, and polar bears can be found when ice is present. Many of these stocks migrate across Arctic waters of the United States, Russia, and Canada.
Population sizes and trends for most U.S. Arctic marine mammals are poorly known, with a few exceptions. The most recent bowhead population estimate (2011) was 16,892, increasing by 3.7% per year (Givens et al., 2012). Based on recent winter migration counts conducted from shore sites in California, the gray whale population ranged from 17,820 in 2007-2008 to 21,210 in 2009-2010 (Durban et al., 2013). Both bowhead and gray whale populations have recovered from or are recovering from overexploitation in the 1800s and early 1900s due to commercial whaling.
The most recent population estimate for the Beaufort Sea stock of belugas was from 1992,
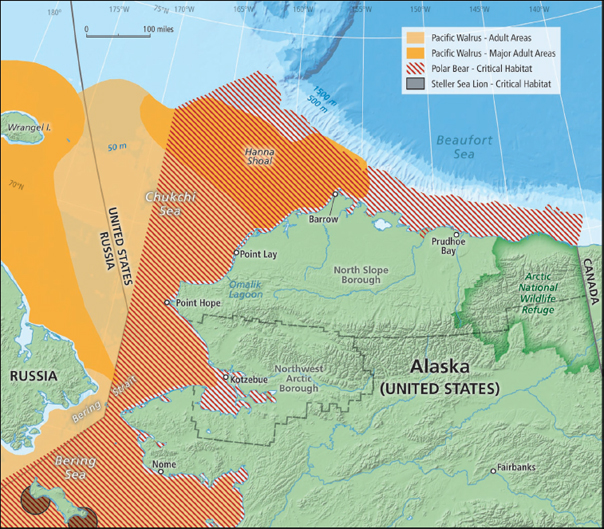
Figure 2.11 Distribution of walrus, sea lions, and polar bears in U.S. Arctic waters. Select locations discussed in the text are also shown on the map. Map area corresponds to the red box in Figure 1.1. Data from Arctic ERMA, attributed to Audubon Alaska (Pacific walrus), NOAA (Steller sea lion), and U.S. Fish and Wildlife Service (polar bear).
when observations from an aerial survey resulted in an estimate of 19,629 (Harwood et al., 1996). When adjusted for availability bias, the estimate increased to 39,258 animals, which may still be underestimated (Allen and Angliss, 2012). More recent surveys suggest that the Beaufort Sea beluga population may be increasing (Harwood and Kingsley, 2013). The population estimate for eastern Chukchi Sea belugas is also outdated and underestimated. Based on surveys from 1989 to 1991, Frost et al. (1993) estimated a minimal population size of 1,200 animals. When corrected for animals not seen, the estimate increased to 3,710 (Allen and Angliss, 2012). Satellite tracking data (Suydam et al., 2001) showed that the aerial surveys for the Chukchi Sea population of belugas only covered a small portion of their range, so it is likely that the population is considerably larger. Data collected
in 2012 by the Alaska Beluga Whale Committee and the National Marine Fisheries Service are currently being analyzed and will provide an updated estimate of population size.
The Pacific walrus population was estimated to number about 200,000 animals between 1975 and 1990; however, the estimates were underestimated because they did not adjust for walruses in Russia or under water (Gilbert et al., 1992; Hills and Gilbert, 1994). The results did not provide reliable or consistent data needed for evaluating trends. Using a new approach in 2006, which involved aerial surveys with corrections from thermal imagery and satellite telemetry, the walrus population was estimated at 129,000 (note that the 95% confidence interval = 55,000-507,000) (Speckman et al., 2011). That estimate was also biased low, as the entire walrus habitat was not surveyed. A repeatable survey technique is needed for more precise understanding of the population size and trends of Pacific walruses.
There is no reliable estimate of the Chukchi Sea subpopulation of polar bears, although there have been efforts to develop an aerial survey to obtain a precise and reliable estimate that could be used for monitoring trends (Nielson et al., 2013). The most recent estimate for southern Beaufort Sea polar bears was 1,526 (Regehr et al., 2006). Amstrup (1995) estimated that the Beaufort Sea stock of polar bears increased by 2.4% per year from 1981 to 1992, with a stable population in the 1990s. Based on recent estimates of survival, recruitment, and body size (Regehr et al., 2007), and low growth rates during two years with low ice cover, the Beaufort Sea polar bear population may be declining (Hunter et al., 2007).
There is little understanding of population sizes or trends for other species of marine mammals in the Chukchi and Beaufort Seas (Allen and Angliss, 2012, and references within). While rough population estimates may exist for some species, they are not reliable or precise enough to examine trends, evaluate influences from climate change, or estimate population-level damage in the event of an oil spill.
Habitat use has primarily been documented by aerial and acoustic surveys and satellite tracking. Aerial surveys provide information on the distribution and habitat selection for bowhead, beluga, and gray whales and other marine mammals (Moore, 2000; Moore et al., 2000; Clarke et al., 2013). Acoustic surveys can monitor marine mammals in ways that aerial surveys cannot, because recording instruments can listen for vocalizations in inclement weather, under the ice, and for long periods of time. A great deal can be learned about distribution (Delarue et al., 2011; Clarke et al., 2013), influences of oceanography (Stafford et al., 2013), disturbances (McDonald et al., 2012), and other aspects of the biology of marine mammals. Extensive acoustic monitoring has occurred in recent years in the Chukchi and Beaufort Seas, especially through the efforts of industry (e.g., LGL Alaska Research Associates et al., 2013).
Satellite tracking has provided additional details about the movements of bowhead whales (Quakenbush et al., 2010; Citta et al., 2012), belugas (Richard et al., 2001; Suydam et al., 2001, 2005), spotted seals (Lowry et al., 1998, 2000), walruses (Jay et al., 2012), and polar bears (Garner et al., 1990; Amstrup et al., 2000, 2001). Some progress has been made to tag and track ringed16 and bearded17 seals, although additional data are still needed.
_____________
16 See http://www.north-slope.org/departments/wildlife/Ice_Seals.php#RingedSealMovementStudy.
17 See http://www.north-slope.org/departments/wildlife/Ice_Seals.php#BeardedSeal; see also http://kotzebueira.org/current_projects3.html.
Because marine mammals are harvested for subsistence, much is known about diet, reproduction, age and growth, body condition, and health status. Hunters have allowed scientists to collect biological samples from harvested animals, and information has been collected on the diets of bowheads (Lowry et al., 2004), belugas (Loseto et al., 2009), seals (Lowry et al., 1980; Quakenbush et al., 2011), and walruses (Sheffield and Grebmeier, 2009). Life history traits are known for bowheads (George, 2009) and belugas (Suydam, 2009) and other marine mammals. Data for a variety of contaminants are available for many species (e.g., O’Hara et al., 1999; Woshner et al., 2001a,b, 2002).
There are many concerns about potential impacts from a changing climate—in particular, that rapidly retreating and thinning summer sea ice may have substantial impacts. Some species, such as those that are ice dependent or ice associated, may have adverse population-level reactions to climate changes, while others adapted to subarctic conditions may benefit. Polar bears, ringed seals, and bearded seals, for example, were listed under the Endangered Species Act because of concerns about negative impacts from predicted future impacts to sea ice and snow (including loss of habitat and access to food sources), although other populations may be resilient to changes (Moore and Huntington, 2008). For example, the bowhead population continues to increase despite the dramatic changes in sea ice observed in the past 10-20 years. Other species, such as fin, humpback, and minke whales seem to be increasing in numbers in the Chukchi Sea, probably because of the changing environment. Climate change impacts to marine mammals may occur through habitat changes (Laidre et al., 2008), including less ice and changing prey, changes in timing or distribution of prey populations (Bluhm and Gradinger, 2008), exposure to novel diseases (Burek et al., 2008), and possibly increased predation from killer whales and competition from more southerly populations that are expanding northward (Moore and Huntington, 2008).
Another possible change with decreasing and thinning sea ice could be an increase in commercial shipping through the Arctic (Smith and Stephenson, 2013). Projections of increased vessel traffic could lead to acute or chronic impacts from oil or chemical spills, anthropogenic sound, increased entanglement in marine debris, and ship strikes. Shipping is also associated with the introduction of invasive species, predominantly through the exchange of ballast water.
Even though there is considerable information about marine mammals in U.S. Arctic waters, there are still significant data needs, many of which are directly related to predicting and assessing possible damages from spilled oil. They include population size and trends, especially for seals, walruses, and polar bears; movements, timing, and habitat use, especially for seals; climate change impacts; health status, including exposure to spilled oil and other contaminants; biomarker data related to exposure to spilled oil and other types of stress; and ability to separate possible impacts of climate change versus spilled oil or other contaminants.
AREAS OF BIOLOGICAL SIGNIFICANCE
In the Arctic and elsewhere, areas of biological significance have disproportionally high productivity, biodiversity, and rates of change of pelagic and benthic marine life relative to other surrounding areas (Grebmeier et al., 2010). These areas may include places with high primary or secondary
productivity, spawning, nesting or calving areas, rearing areas for young animals, migration routes, or feeding areas. In the winter, sea ice habitats are used by polar bears and ice seals. In some cases, female polar bears may den on the sea ice. Other animals forage for ice seals, which are polar bears’ primary prey. Some ice seals migrate south to the Bering Sea during winter, but many ringed and bearded seals remain in the Chukchi and Beaufort Seas to feed, give birth, and molt. Areas near leads or polynyas are likely important for seals and bears throughout the winter.
In spring, lead systems provide habitat for bears and seals as well as migration corridors for marine mammals (especially bowhead whales and belugas) and marine birds. As spring progresses, leads are the first areas for phytoplankton blooms. Recent research has documented incredibly large ice algae blooms under pack ice in the Chukchi Sea (Arrigo et al., 2012). Primary productivity in those areas is among the highest measured in marine systems.
In open water season, nearshore areas are used by a variety of animals. Birds use the habitats for nesting, brood rearing, molting, feeding, and migration stopovers. Marine mammals use specific areas as haulouts for spotted seals and walruses. Belugas can use cobble beaches near Omalik Lagoon, located south of the village of Point Lay, for molting, calving, and feeding. Breaks or passes in the barrier islands, especially in the Chukchi Sea, are also used. Gray whales migrate to the Chukchi Sea in the summer to feed; they can often be found in the shore zone where they appear to rub against the seafloor, possibly in an effort to rid themselves of parasites and barnacles.
There are specific geographic areas associated with some animals. Hanna Shoal is an important foraging area for walruses because of the abundant benthos (Figure 2.11; Clarke et al., 2013; LGL Alaska Research Associates et al., 2013). Oceanographic conditions in and adjacent to Barrow Canyon aggregate fish and invertebrate prey (Rand and Loggerwell, 2010) for belugas and bowheads (Figure 2.10). Ledyard Bay is critical habitat for spectacled eiders (Figure 2.9), as molting birds aggregate and probably forage there in the later summer and early autumn (Petersen et al., 1999). Some king eiders and long-tailed ducks also use Ledyard Bay for molting, and probably also for foraging (Oppel et al., 2009). The inside barrier islands along the Beaufort Sea coast are molting habitat for long-tailed ducks (Lysne et al., 2004) and migration staging areas for red and red-necked phalaropes. Deltas along the Beaufort Sea coast are nesting habitats for geese, particularly lesser snow geese and brant, and yellow-billed loons in some deltas (Ritchie et al., 2000). The Mackenzie and Colville River Deltas, and the nearshore areas between the two, are also important for Arctic cisco, a major focus of the Nuiqsut fish harvest (Figure 2.8; Moulton et al., 2010). The shelf break in the Beaufort Sea is important because belugas aggregate there for feeding (Suydam et al., 2005; Citta et al., 2013). Bowheads may also migrate along the shelf break in the autumn but are more frequently found in shelf areas, influenced by ice concentration (Moore, 2000; Quakenbush et al., 2013). Coastal areas of the Arctic National Wildlife Refuge, which is managed by the USFWS, are important for denning polar bears (Durner et al., 2003).
In the Canadian Beaufort Sea area, the Mackenzie River and its delta are especially important for some marine and anadromous fishes, marine birds, and beluga whales (Harwood et al., 2005). Birds and marine mammals reside here in the open water season, but to a lesser degree in the winter with the exception of ringed seals (Stirling et al., 1982; Smith, 1987). In northeastern Russia, Wrangel Island is a vital denning area for Chukchi Sea polar bears, haulout for walruses, and nesting area for lesser snow geese. The northern coast of Chukotka is also an important haulout area for walruses,
and the nearshore waters of northern Chukotka are important for feeding bowheads (Moore et al., 1995), especially in later summer and autumn, and lagoons and bays are used by staging or molting Steller’s eiders and other species.
To assess changes in areas of biological significance in the western Arctic between the northern Bering Sea and the eastern Chukchi Sea, an international Distributed Biological Observatory (DBO) was formed. The basis of the DBO is repetitive sampling to gain better understanding of biodiversity, areas with high productivity, and rates of change.18 Five locations were selected for annual pilot studies between 2010 and 2013, successfully sampling oceanographic conditions, chlorophyll and nutrients, phytoplankton and zooplankton, benthos, and higher trophic levels along a series of transects.
EFFECTS OF OIL ON ARCTIC ECOSYSTEMS
There are no simple ways to anticipate the effects of an oil spill on an ecosystem. The effects may be acute, as observed in mortality events directly following a spill, and/or chronic, as observed in the population trajectory of species over time or through changes in community composition. Dose-response studies and assessments of sublethal effects on individual species can provide insights into the relative sensitivity of various Arctic species to oil, but they are not always designed to replicate environmental conditions encountered by the organisms after a spill. Much of what has been learned about the acute and chronic effects of oil on ecosystems has come from studies of previous spills or from studies of oil exposure in experimental mesocosms. A summary of the acute and long-term effects on fish, marine mammals, and birds from research on some of the major spills, with particular relevance for high-latitude regions, is available (SL Ross Environmental Research Ltd. et al., 2010). The report illustrates the difficulty in attributing long-term ecosystem or species changes to a spill event, especially in the context of other environmental changes. This could be particularly difficult in the Arctic because of rapid rates of climate change and limited information on the effects of oil on Arctic species and ecosystems. However, effects on organisms could continue in environments where oil persists for years, as was observed for some bird species in oiled areas of Prince William Sound after the Exxon Valdez spill.
Lower Trophic Levels
Many bacterial taxa known to degrade petroleum hydrocarbons are found in the Arctic, and recent experiments confirm that fresh Arctic Ocean water contains bacteria that grow on and degrade Arctic Shelf oil at −1°C (McFarlin et al., 2014). In a study of phytoplankton and zooplankton in a freshwater Arctic lake, Miller et al. (1978) found an initial decrease in primary productivity and a suppressed phytoplankton bloom after a controlled experimental spill, but an increase to pre-spill levels afterward. Zooplankton were greatly reduced after the introduction of oil, which may have led to observed changes in the phytoplankton species composition. Other studies have also shown that marine zooplankton are negatively affected by crude oil (Barnett and Kontogiannis, 1975; Berdugo et al., 1977; Miller et al., 1978). Larval stages appear most sensitive to polycyclic aromatic hydro-
_____________
carbons that occur in crude oil, with less impact on later stages, although oil can collect in feeding appendages and bioaccumulation of hydrocarbons can affect egg production and reproductive success (Jensen and Carroll, 2010).
Anthropogenic activities such as oil spills could lead to multiple stressors with direct or indirect impacts on the benthos (e.g., Blanchard and Feder, 2003; Blanchard et al., 2003, 2010). In a highly focused research project that examined the relative impacts of letting an oil slick make landfall on an Arctic beach versus using dispersants in very shallow water (a few meters), filter-feeding benthic organisms rapidly extracted oil from the water column (Humphrey et al., 1987). Deposit feeders were slower to take up oil, but they continued to accumulate oil for as much as two years. Short-term exposure to dispersed oil resulted in temporary accumulation of hydrocarbons in Arctic invertebrates (Mageau et al., 1987). However, this study was deliberately designed to expose benthic organisms to dispersant concentrations far higher than they might experience in a spill in deeper water, where the dispersed hydrocarbon concentrations may be rapidly diluted. Two other studies have documented impacts on benthic organisms in the Arctic due to hydrocarbons (Dauvin, 1982; Blanchard et al., 2011). These studies used small-scale, repeated transects, which are necessary to capture acute effects that may be introduced at the larval stage.
Effects on Marine Birds
Many birds would be vulnerable to spilled oil in the spring lead system, in nearshore areas, or in river deltas during the open water season through direct exposure and contact or through ingestion of oil through preening or consumption of contaminated prey. Because of their importance for resting, molting, feeding, migration, nesting, and/or brood rearing, an oil spill in these areas could have population-level impacts.
Effects on Marine Mammals
Marine mammals that rely on fur for insulation (e.g., polar bears, sea otters) have shown high sensitivity to hydrocarbons, while those that rely on blubber for insulation will be less sensitive to impacts related to thermoregulation. Other health impacts, such as irritation to skin or eyes, ingestion or exposure to oil, or impacts to prey may be similar among species (Geraci and St. Aubin, 1990; NRC, 2003). There are some data available on how oil might affect bowhead whales (NRC, 2003), which could be valuable for assessing environmental changes and possibly for evaluating impacts during or after an oil spill.
It is important to understand other health factors currently impacting some marine mammals—for example, numerous ringed seals and walruses were found sick or dead in northern and western Alaska in 2011. The unknown disease was characterized by skin lesions around the face, flippers, and tail; lethargy; and respiratory distress. An Unusual Mortality Event was declared for ringed seals and walruses but not other species, although some individuals also showed signs of the disease. Fewer sick animals were seen in 2012 or 2013. The cause (or causes) of this disease is still unknown, although
investigations continue.19 Another Unusual Mortality Event was declared for cetaceans in the Gulf of Mexico in February 2010, five weeks prior to the Deepwater Horizon oil spill, and lasted through December 2012. The impact of the spill on bottlenose dolphins is still being investigated as part of the Natural Resource Damage Assessment (NRC, 2013) and could provide valuable information for assessing cetacean exposure and health in the future.
NEW AND ONGOING U.S. ARCTIC RESEARCH
In this section, the committee chose to highlight a few new and ongoing research and monitoring efforts that focus on environmental characteristics of the Arctic. Additional research efforts that focus on oil and oil spill response techniques in Arctic conditions are discussed further in Chapter 3.
In July 2012, NOAA’s Office of Response and Restoration and several partners initiated an ERMA for the Arctic. ERMA is an online mapping tool that synthesizes a wide variety of data into an interactive map; the aim is to provide assessments and updates of an ongoing situation and improve coordination among responders. Arctic ERMA20 is a partnership between NOAA (Office of Response and Restoration and Office of Ocean and Coastal Resource Management), the Department of the Interior’s Bureau of Safety and Environmental Enforcement (BSEE), the Oil Spill Recovery Institute, and the University of New Hampshire’s Coastal Response Research Center. Its aim is to improve access to a wide variety of data from Arctic lease areas. ERMA integrates real-time and static datasets into a single map, where data layers can be turned on and off. The map provides visualization of features including real-time physical conditions, geography and topography, critical wildlife habitats, subsistence use areas, oil and gas wells, other infrastructure, and remote sensing and webcam imagery. With an available Internet connection, ERMA can be used during an emergency to visualize the situation and analyze hazards from the field or from a remote location. Ongoing Arctic ERMA efforts include collaborations to obtain high-priority Canadian datasets, continuing to work with Arctic communities, and integrating additional oceanographic and meteorological data (presentation by Amy Merten, NOAA, February 2013).
A large range of data types and formats exist for the physical and biological Arctic environment, which presents a challenge for effective and timely integration and assimilation. The Advanced Cooperative Arctic Data and Information Service21 (ACADIS) is a National Science Foundation (NSF)-funded collaboration between NSIDC, the University Corporation for Atmospheric Research, and the National Center for Atmospheric Research that provides data management support for the Arctic community, in particular support for NSF-funded Arctic data collection. ACADIS provides data archival services and is working now to link to other national data centers (including NSIDC remote sensing data) and develop integrated datasets, manage a wide range of data and metadata types, provide better search functionality for data retrieval, and develop protocols for standardized datasets and data visualization tools. All of these elements will improve data assimilation in
_____________
19 See http://www.alaskafisheries.noaa.gov/newsreleases/2011/umedeclaration2011.htm.
20 See http://response.restoration.noaa.gov/maps-and-spatial-data/environmental-response-management-applicationerma/arctic-erma.html.
numerical forecast/trajectory models, and support efforts toward real-time integrated visualization of data necessary for responders.
Another NSF-supported initiative, the Arctic Observing Network22 (AON), is an ocean, atmosphere, ice, and land-based observing system of the Arctic environment. AON includes physical, biological, social, cultural, economic, and system studies of the Arctic. The implementation of AON was in part motivated by recommendations in the 2006 NRC report Toward an Integrated Arctic Observing Network to initiate an Arctic Observing Network for the International Polar Year (2007-2008). Data collected under AON are made publicly available as soon as possible and are not subject to any embargo period, allowing improved access to data for a broad range of users. This coordinated effort will be developed further through U.S. involvement in the Sustaining Arctic Observing Networks23 (SAON) program, an international program of sustained and coordinated pan-Arctic observing and data sharing. Program goals include promoting community-based monitoring efforts and expanding an observing network that can be most effective for a broad range of stakeholders, including communities, policy makers, business, industry, and scientists.
BOEM has launched a large number of ecosystem studies over the past several years in both the Chukchi Sea and the Beaufort Sea, with several more proposed for 2015 (BOEM, 2013). These range from nearshore studies of distribution and habitat use of fish and birds to abundance and distribution of polar bears, bowhead whales, and seals. Much of the research consists of comprehensive marine biological studies with supporting oceanographic components, and many include more than one trophic level. There is an emphasis not only on studies of species identification, abundance, and distribution but also feeding and growth, interaction, and environmental influences. These findings are designed to supply benchmark measurements prior to oil and gas development, and they will also provide critical information to track impacts related to climate change. BOEM has also funded shoreline mapping of the North Slope, as part of the ShoreZone program, to characterize estuarine, intertidal, and nearshore geomorphology (BOEM, 2013).
The Chukchi Sea Offshore Monitoring in Drilling Area24 (COMIDA) program is one of the comprehensive research programs funded by BOEM. The study is investigating benthic organisms and sediment characteristics, with a new phase that is focusing on Hanna Shoal. As mentioned earlier, there is also a study identifying fish and invertebrates in the U.S. and Canadian Beaufort Seas, which is being done in conjunction with the Department of Fisheries and Oceans Canada. BOEM and NOAA are also co-sponsoring a study of how endangered whales utilize the Chukchi Sea.
Another BOEM-sponsored initiative is investigating the physical properties and currents in the northeastern Chukchi shelf region and exchanges between the Chukchi and Beaufort Seas.25 The results of this study will be important for evaluating oil spill trajectories and could guide development and validation of oil spill trajectory models. The objectives are to quantify circulation pathways from the shallow Chukchi Sea to the deeper Beaufort Sea; quantify transports through Barrow Canyon; examine the relative importance of prevailing wind forcing, the oceanographic pressure head between the Pacific and Arctic oceans, and the influence of the Earth’s rotation in driving the major ocean
_____________
22 See http://www.arcus.org/search/aon.
23 See http://www.arcticobserving.org.
24 See http://www.comidacab.org.
25 See http://dm.sfos.uaf.edu/chukchi-beaufort/background.php.
circulation patterns in the region; understand seasonally changing ocean stratification and how this impacts current systems; and understand processes that transport water between the Chukchi and Beaufort Seas (primarily winds and unstable flow patterns that generate ocean eddies).
The Beaufort/Chukchi Seas Mesoscale Meteorology Modeling Study26 is also funded by BOEM. Wind forcing, the main driver of surface ocean currents and sea ice motion, and weather patterns in the Beaufort and Chukchi Seas are being monitored, analyzed, and modeled numerically to evaluate and predict oil spill trajectories and assess potential environmental impacts. Local weather systems and winds are complicated in the Beaufort Sea region because of temperature differences between the land and ocean and the steep terrain changes associated with the Brooks Range to the south. Meteorological buoys are being deployed in the Chukchi Sea, atmospheric data are being assimilated into meteorological models, and the mechanisms leading to the formation and dynamics of local weather systems are being investigated.
BOEM’s oil spill risk analysis model generates an ensemble of many simulated oil spill trajectories over many years of wind and ocean current data to develop statistics about the risks of an oil spill.27 Numerical trajectory models estimate trajectories based on velocity data from observations or circulation models; they do not directly assimilate oceanographic or meteorological data, but rely on the degree to which the data represent real-world conditions. For example, as discussed earlier in this chapter, the surface ocean flow over the Chukchi shelf is often not in the direction of the wind because the flow from the Pacific to the Arctic basins is largely driven by the ocean pressure gradient between the two basins. Because surface trajectory models are often forced only by winds or by ocean climatology that is not valid during the time of interest, this key feature of ocean dynamics is not represented. Further significant efforts on model improvement and validation are needed. A BOEM-funded dedicated tracer-release study to examine dispersion in the Chukchi Sea is being planned by researchers at BOEM and the University of Alaska, Fairbanks; this will be interfaced with modeling efforts of NOAA and BSEE.
The Office of Naval Research recently initiated two projects (Emerging Dynamics of the Marginal Ice Zone28 and Sea State and Boundary Layer Physics of the Emerging Arctic Ocean29) to study the retreat of sea ice in the Beaufort Sea and the physical mechanisms in the marginal ice zone. An important part of these studies is wave-ice interaction; wave buoys and ice-mounted instruments are being used to measure ice thickness and atmospheric and oceanic parameters.
In addition to these programs, the European Commission funds basinwide Arctic projects. Current examples are Arctic Climate Change, Economy and Society,30 which runs from 2011 to 2014, and Ice, Climate, Economics—Arctic Research on Change,31 which runs from 2014 to 2017. Both have observational and modeling components but also include impacts from oil spills in ice.
_____________
26 See http://mms-meso.gi.alaska.edu/.
27 See http://www.boem.gov/Environmental-Stewardship/Environmental-Assessment/Oil-Spill-Modeling/Oil-SpillOccurence-Rate-for-Oil-Spill-Risk-Analysis-%28OSRA%29.aspx.
28 See http://www.onr.navy.mil/en/Science-Technology/Departments/Code-32/All-Programs/Atmosphere-Research-322/Arctic-Global-Prediction/Marginal-Ice-Zone-DRI.aspx.
29 See http://www.onr.navy.mil/en/Science-Technology/Departments/Code-32/All-Programs/Atmosphere-Research-322/Arctic-Global-Prediction/Sea-State-DRI.aspx.
30 See http://www.access-eu.org/.
31 See http://www.ice-arc.eu/.
OBSERVING NETWORK NEEDS
In an oil spill, early warning is the key to rapid intervention. While efforts to monitor physical processes and ecosystem components are under way (as described in previous sections), there is still a need to bring together disparate data in an integrated fashion. AOOS, AON, and Arctic ERMA have made admirable starts in this effort, but each has a different focus, datasets, stakeholders, and potential or current users. There are also many community-based monitoring programs in Alaska, but they are not well integrated. Existing programs monitor physical conditions (e.g., ocean, ice), species observations (e.g., seabirds, walrus), coastal observations, and water quality and shellfish. Each of these networks has unique data needs and interests in different spatial and timescales. Observing networks in the Arctic are further challenged by very large distances and areas to cover, a lack of in situ instrumentation, and a lack of sensor integration.
An integrated observing network could build on existing networks and efforts, such as AON or AOOS, but could be enhanced with supplemental data from community-based monitoring, in situ instruments, and remote sensing data (discussed further in Chapter 3). To be of value for oil spill response, the network will need to seamlessly interface with marine traffic information systems and monitoring data from oil fields and will need to include comprehensive data on sentinel species such as migratory birds and marine mammals. For local communities, there is need for integrated data networks that can disseminate information needed for subsistence activities, search and rescue, and emergency response. An integrated observing network would also help advance many of the key priorities identified by the Interagency Arctic Research Policy Committee in their 2013-2017 Five-Year Plan (NSTC, 2013).
CHAPTER CONCLUSIONS AND RECOMMENDATIONS
Conclusion: Anticipated Arctic development and its increased potential for oil spills in the region drive the need to improve understanding of current environmental conditions, as well as possible changes to ecosystem parameters in response to a spill. Critical types of benchmark data for oil spill response in the Arctic include:
- Operational near-real-time forecasts and updates of parameters such as winds, waves, ocean currents, ice cover, ice floe size distribution and drift, thickness, as well as derivative products to deliver high-resolution datasets in support of response actions in all weather and seasons;
- Real-time meteorologica-oceangraphic data from observational platforms (e.g., drilling and production rigs, high-frequency radar, gliders, drifting buoys) to support real-time forecasting and environmental knowledge;
- Identification and monitoring of areas of high biological diversity;
- Identification of rates of change for key species;
- Spatial and temporal distributions and abundances for fish, birds, and marine mammals;
- Subsistence and cultural use of living marine resources;
- Sensitivity of key Arctic species to petroleum hydrocarbons; and
- High-resolution coastal topography and shelf bathymetry.
Additional research and development needs include:
- Meteorological-oceanographic-ice forecast model systems with spatial resolution at 1 km or better and 2- to 3-hour temporal resolution in areas around exploration and production platforms, and
- Integration of traditional knowledge of sea state and ice behavior into the operational forecast environment.
Conclusion: There is a need for a community-based, multiuse observing network in the Arctic that provides long-term, accessible benchmark information (e.g., environmental conditions, local and traditional knowledge, maritime activity) to support oil spill response and other activities. Current Arctic observing networks are fragmented and do not provide a comprehensive regional view. Effort also needs to be devoted to integrating available data from different groups. Such a system could be a collaboration of federal, state, and tribal governments; non-governmental organizations; and maritime and oil/gas industries, and could be organized by IARPC.
Conclusion: The release of proprietary monitoring data associated with exploration activities would further increase knowledge of Arctic environmental conditions and baselines. Making industry and government data more freely available and increasing transparency would bolster the public perception of industry-sponsored research, as would publishing such data in peer-reviewed publications. Where appropriate, communities could also release data that they hold regarding important sites for fishing, hunting, and cultural activities.
Conclusion: High-quality nautical charting is essential for marine traffic purposes and oil spill response in the Arctic. However, shoreline topographic and hydrographic data are mostly obsolete, with limited tide, current, and water level data and very little ability to get accurate positioning and elevation. A lack of high-quality nautical charts from federal agencies can be attributed to inadequate funding and historical prioritization. Data from sources outside NOAA’s Office of Coast Survey (e.g., other federal agencies, state agencies, academic research vessels, commercial vessels) could help to fill gaps in data collection. While outside data sources may have quality assurance and quality control issues, analysis of such data could provide information on which areas are most in need of updates.
Recommendation: High-resolution satellite and airborne imagery needs to be coupled with up-to-date high-resolution digital elevation models and updated regularly to capture the dynamic, rapidly changing U.S. Arctic coastline. Nearshore bathymetry and topography should be collected at a scale appropriate for accurate modeling of coastline vulnerability and storm surge sensitivity. Short- and long-term Arctic nautical charting and shoreline mapping that have been identified in NOAA and USGS plans should be adequately resourced, so that mapping efforts can be initiated, continued, and completed in timescales relevant to anticipated changes. To be effective, Arctic mapping priorities should continue
to be developed in consultation with stakeholders and industry and should be implemented systematically rather than through surveys of opportunity.
Conclusion: Ice data and charts are critical needs for marine traffic purposes and for oil spill response efforts. Ice thickness, concentration, and extent need to be integrated into operational use.
Recommendation: A real-time Arctic oceanographic-ice-meteorological forecasting system is needed to account for variations in sea ice coverage and thickness and should include patterns of ice movement, ice type, sea state, ocean stratification and circulation, storm surge, and improved resolution in areas of potential risk. Such a system requires robust, sustainable, and effective acquisition of relevant observational data.
This page intentionally left blank.










































