
Active electro-optical (EO) sensing systems employ a transmitted optical field (usually from a laser) that interacts with a distant object. The scattered light is then sensed by a receiver system to derive information about the object. Thus, active EO systems are similar to microwave radar systems but operate in the visible or infrared region of the electromagnetic spectrum. As a result of the shorter wavelengths of infrared and visible light, active EO systems have much higher (>20,000 times) angular resolution and range precision than radar systems. They also benefit from controlling the illumination, which provides an advantage over passive EO systems. For example, this allows active EO sensing to be day/night-capable at short wavelengths, and provides greater control over shadowing phenomenology. Thus, active EO systems enjoy resolution advantages over microwave radar and illumination advantages over passive EO systems.
This combination of features enables new, unique, and operationally important commercial, military, and intelligence applications. An example of an ideal application is the ability to provide imagery much more similar to what the eye is used to seeing than radar imagery, but at ranges beyond the capability of passive EO sensors. Three dimensional (3-D) mapping is an important commercial and military application of active EO sensing that can provide critical information (e.g., detailed 3-D scene data) not readily available from alternative technologies. It is anticipated that a global, 3-D database derived from active EO sensing measurements will support civil, commercial, and military needs as the foundational layer for organizing geospatial information of all types. One potentially transformational scientific, commercial and military application of active EO sensing is accurate mapping of world wind directions and velocities from space, enabling more accurate weather prediction, more efficient routing of aircraft, and improved accuracy of long-range weapons. Another example is inexpensive 3-D imagery capable of providing the necessary information to guide a driverless car or to control a robot. Active EO sensing is ideal for highly sensitive vibration detection that can tell if power is flowing through a transformer or liquid is flowing through a pipe or that can remotely tell how many cylinders a vehicle has or, possibly, if the vehicle needs a tune up.
The committee’s key conclusions and recommendations below are taken from the body of the report and are numbered according to where they appear in the chapters in order to point the reader to a more detailed discussion.
Conclusion 1-1: Active EO sensing enables measurements not possible with passive EO sensors by exploiting the control of the illumination. Exploiting control of the illumination includes its coherence properties.
Conclusion 1-2: Active EO sensing offers many of the controlled illumination advantages of radar and, by operating at much shorter wavelengths, enables greater range precision and angular resolution as well as more literal interpretability.
Conclusion 2-18: Active EO sensing is poised to significantly alter the balance in commercial, military, and intelligence operations, as radar has done over the past seven decades.
The close analogy between conventional radar and active EO sensing can serve as a guide to the trajectory of development for active EO sensing. Since its invention in The World War II as a game-
changing technology, radar has developed a mature technology and exploitation base with novel ways of overcoming limitations and has proliferated to a wide variety of military and commercial applications. Many of the techniques developed for radar have analogs in active EO sensing, such as advanced waveforms and synthetic aperture imaging, and are gradually being implemented in active EO sensing. Our knowledge of the diverse applications of radar technology has enabled a more diverse set of active EO sensing modes in a relatively short time frame.
There are two main types of optical active EO sensing: (1) direct detection, which measures only the intensity of the return signal, and (2) heterodyne—or coherent—detection, which measures the electromagnetic field of the returned signal, including both phase and intensity.1 Direct detection can produce traditional two-dimensional (2-D) intensity images similar to passive EO images. 2-D intensity images generated by active EO systems can be enhanced with additional degrees of freedom in similar ways to the enhancements that occur with passive EO imagers—namely, with polarization, color, or temporal modulation. What is different in active sensing is that the sensor provides control over the illumination (timing, waveforms, spectral properties, polarization, etc.) One consequence of this controlled illumination is that distance can be measured using the speed of light and a clock to measure the round trip time to an object and back. This makes it easy to create a 3-D image of an area, such as Figure S-1 (Figure 2-12 in the report).
The same clock can be used to turn the detector on and off, so that only backscatter in the range near the object of interest is viewed; that is to say, the ability to range-resolve a target includes the ability to range-gate out intervening scatterers, so long as sufficient illumination reaches the target and returns to the sensor. Eliminating scatter and clutter, in front of and behind/below the object of interest is an important capability of active EO sensing (Figure S-2).
Although the transmitted photons that active EO uses (typically a laser) for sensing are not free and add complexity to the system, the advantage is that one can have as many photons on the object as one is willing to pay for. There are no shadows in monostatic,2 active EO imaging for any point to which the sensor has line-of-sight access.
Usually, the light used in active EO sensing has a narrow wavelength band. Interfering narrow-band scattered light from different portions of a rough surface creates light and dark areas at the receiver called speckle. Speckle is a noise source in many active EO sensing applications, but speckle also carries information about the target that can be exploited. Both surface scattering and volume scattering objects are of interest. Active EO sensing has a wide range of volume scattering applications for sensing wind, aerosols, and chemical and biological clouds of gas. Both volume and surface scattering can also be applied underwater. The committee found that discussing all of the components that comprise active EO sensing, including the systems architectures and the phenomenologies associated with active EO sensing, has been a substantial undertaking.
Heterodyne (also called coherent) detection uses a sample of the outgoing laser pulse, the local oscillator (LO), to beat against the return signal so that phase can be measured as well as intensity. Coherent detection can even measure the minute Doppler shifts associated with scattering from vibrating objects, a technique called laser vibrometry. Aperture synthesis techniques, such as synthetic aperture ladar (SAL) and multiple input, multiple output (MIMO) techniques also use coherent methods because they need to capture samples of the full pupil plane field, including both phase and intensity across the pupil plane.
____________________
1 As illustrated in Figure 1-3, there are also a variety of lidar techniques that utilize spectroscopic interactions of the laser illuminator with the target volume, such as Raman or Rayleigh scattering, fluorescence, etc.
2 An active EO sensor can be monostatic, meaning the laser illumination is emitted from the same optical aperture that receives it, or it can be bistatic, meaning separate apertures are used for the transmitter and the receiver.
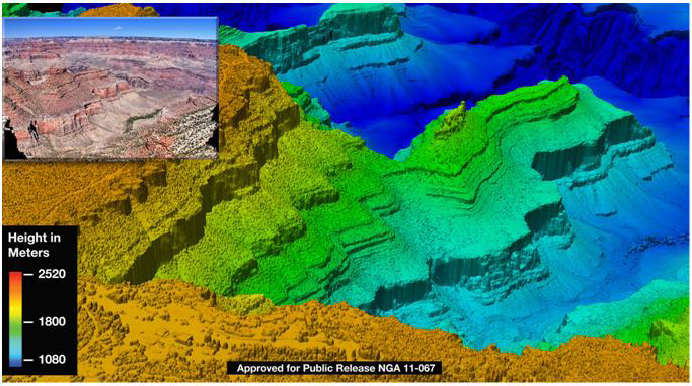
FIGURE S-1 3-D active EO imagery of the Grand Canyon with a photograph of the same region inset. Note the dramatic change in color, therefore range, from light green to dark blue along the ridge. This dramatic range change is not obvious in the passive imagery. SOURCE: Lincoln Laboratory MIT, Tech Notes: Airborne Ladar Imaging Research Testbed, http://www.ll.mit.edu/publications/technotes/TechNote_ALIRT.pdf, 2011. Reprinted with permission of MIT Lincoln Laboratory, Lexington Massachusetts.
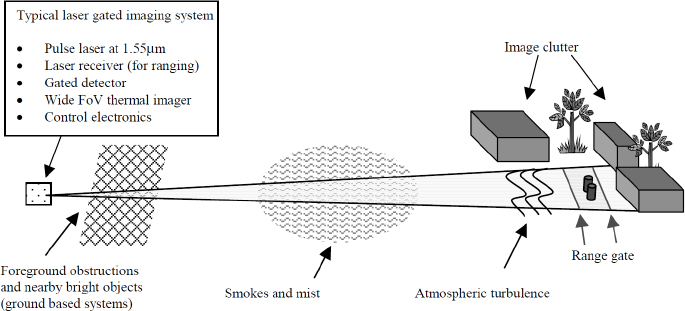
FIGURE S-2 A gated active EO imaging system can eliminate clutter and obscurants that might otherwise degrade the image. Although laser returns from image clutter, smoke, mist and foreground obstructions can be range-gated, effects of atmospheric turbulence remain. SOURCE: I. Baker, S. Duncan, and J. Copley, 2004, “A Low Noise, Laser-Gated Imaging System for Long Range Target Identification,” Proceedings of SPIE, 5406. Courtesy of Selex ES Ltd.
Along with the rapid development of sensing modalities, the components for active EO sensing, such as lasers, detectors, optics, and processing, are maturing. The committee expects new and unexpected application areas to develop on a regular basis over the next decade. It anticipates global interest in this technology, driven by many diverse needs. Active EO sensing is a very dynamic area of R&D and has applications in Europe and Asia as well as in the United States (publication data for the past decade are presented in Chapter 1, Figure 1-13). China, for example, has severe air pollution,3 so it would be natural for it to invest in active EO technologies to measure air pollution parameters.
The United States leads in the development of high-performance active EO systems in the military arena. However, significant EO technologies are now being developed globally. For example, most commercial mapping and surveying systems are produced outside the United States, and all the DARPA Grand Challenge (2004-2005) autonomous vehicles used systems manufactured by the German company SICK because of their low cost and availability. In the literature, Europe has demonstrated a strong capability in a variety of military active EO sensors. Many foreign-based component laser and detector technologies are more advanced than their U.S. counterparts for application in both commercial and high-end active EO sensors.
Complex systems, whether commercial or military, require significant time and resources to develop. Systems developed just for the military require significant resources. The commercial sector may bear the development costs for those active EO sensing technologies with significant commercial applications. Volume manufacturing can dramatically reduce production costs. The potential for inexpensive, high-volume systems makes the robotic application of active EO sensing a potential game changer.
Conclusion 2-16: Commercial applications for active EO sensing will become widespread, dramatically increasing the use of active EO sensing and significantly lowering the cost.
Conclusion 2-17: Robotics—for example, autonomously navigated vehicles—is likely to be a dominant commercial and military application for active EO sensing.
Conclusion 2-19: Most active EO sensors used for military and security applications will fall into one of two categories: (1) adaptation of inexpensive commercial devices to military applications, or (2) development of unique active EO sensing systems for the military. The first category is accessible to nonstate actors and resource-poor countries. The second category is only accessible to countries with significant resources.
High-performance, specialized active EO sensing devices and systems require significant investment to develop, pose difficult engineering challenges to deploy, and require persistence and a long lead time to field practical systems. This capability requires developing and maintaining a large infrastructure of related technologies and is expensive and time consuming.
Conclusion 2-20: Development programs for high-end active EO sensors will involve observable activities or indicators of the direction these programs are taking.
Conclusion 2-21: Widespread, commercially available active EO technology offers a low barrier to entry for asymmetric adversaries with limited resources as well as for those seeking to adapt the technology for large-volume applications.
Recommendation 2-1: Analysts assessing states of technological development and projected timelines for developments of military significance should pay close attention to activity in the commercial sector.
____________________
3 See http://www.ft.com/cms/s/0/eed7c0be-e7ca-11e2-9aad-00144feabdc0.html.
As a final note, the United States imposes certain very specific standards on the use of its sensors. For example, the United States will not deploy a sensor system that has a significant chance of blinding a person. Under the usual offensive rules of engagement, the United States also does not permit a kill decision to be made without the involvement of a responsible human decision maker, as would be possible with robotic attackers. It is not obvious, however, that a potential adversary would employ the same operational constraints that the United States employs. The uses of active EO sensing could be a technological surprise if a state or nonstate actor were to impose fewer ethical or policy constraints on an EO-sensor-equipped weapon system.
Recommendation 1-1: To avoid the possibility of technological surprise, the U.S. intelligence community should consider all potential uses of active electro-optical sensing, including those not allowed by the ethics and policies of the United States.
CONCLUDING THOUGHTS AND OVERARCHING CONCLUSION AND RECOMMENDATION
Recent advances in laser illuminators, sensitive broadband detectors, and rapid data processing are combining to enable active electro-optical (EO) sensing to bring revolutionary advances in areas such as mapping, targeting, autonomous robotics, environmental monitoring, weather prediction, and intelligence gathering. In the context of this committee’s task to focus on those areas of active EO sensing that could produce technological surprise adverse to U.S. national security, the committee arrived at the following overarching conclusion and recommendation:
Overarching Conclusion: Active electro-optical sensing is a rapidly emerging technology with many applications across intelligence, military, scientific, and commercial domains. It has the potential to alter the balance in many of these areas. Interest in developing and applying active electro-optical sensing has consequently risen in other nations, putting U.S. leadership at risk, to the degree that in some instances the United States no longer leads.
Overarching Recommendation: Uses and development worldwide of active electro-optical (EO) sensing should be tracked aggressively by the U.S. intelligence community, and active EO sensing should be aggressively developed by the United States.





