
3
Use of Simulation in Waterway Design
Waterway design, which is reviewed in Chapter 2, is a complicated process. Some elements of the design process present opportunities for the application of computer-aided design techniques, including shiphandling simulation.
The use of shiphandling simulators to support the training of merchant mariners is generally well-known, and a number of ship simulators exist worldwide for training vessel operators and engineers. The emphasis of these simulators is more on reproducing the ''feel'' and behavior of the vessel rather than on predicting a vessel's trajectory with the accuracy needed for waterway design. Some simulators provide sufficient accuracy to accommodate both objectives. This chapter introduces the practice of using simulators to generate data that can replace or supplement "experience-based data" and rules of thumb, which have formed the basis for waterway design in the past. Simulation estimates the trajectory of design vessels that will use, or are projected to use, the waterway during its design life. Carefully designed simulator runs are used to gather the data that are then analyzed to draw conclusions about optimum or required minimum waterway dimensions and orientation, as well as ship operating procedures.
This chapter identifies the basic features of shiphandling simulators and simulation, the questions that simulation attempts to answer, and the basic assumptions that are made in simulation studies.
RELATIONSHIP OF PILOTING TO SIMULATION
A simplified block diagram of the full-scale piloting system is shown in Figure 3-1. The central component is the closed-loop feedback system consisting of the pilot, the display being used for navigation, and the response of the ship (those elements within the dotted box). The display represents the physical depiction of the present environment that affects piloting. The display can vary from a 360° visual view of the surrounding area on a clear, sunny day to just a radar image of the surroundings. The pilot interprets the situation and reacts by, for example, changing the rudder angle or increasing or decreasing thrust. Any changes in the heading and speed of the ship are discernable in the display. The behavior of this closed-loop feedback system is referred to as the behavior of a piloted ship.
Two other principal components in Figure 3-1 are the external environmental forces and the external visual environment. These blocks represent all of the external influences on the ship and on pilot behavior that are unique to the waterway, including channel topography, atmospheric visibility, tide, waves, currents, and wind, as well as the geographic features, such as aids to navigation, buildings, and bridges, that constitute the waterway
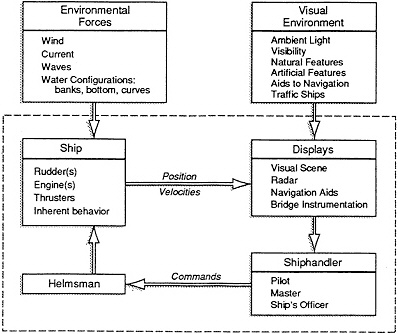
FIGURE 3-1 Block diagram of piloting.
environment. Some of these aspects are not fixed and can vary according to the moment (such as other ships in the waterway), the time of day (such as tide), from day to day (such as visibility, wind, and waves), or from season to season (such as flow in the waterway). The impact of many of these waterway features are generally known to the pilot only implicitly, that is, from the ship's reaction to them. Pilot ability to anticipate their effects is directly related to a pilot's familiarity with the vessel's operating characteristics and with the waterway.
The purpose of a simulator run for waterway design is to predict the track of a ship piloted by a mariner who is experienced in piloting in the existing waterway. Accordingly, a shiphandling simulator models the components of the full-scale piloting problem discussed above. The fundamental difference is that a simulator replaces the inherent behavior of the ship with an approximation of the behavior of a full-scale ship. This model of inherent ship behavior is a computer-based, mathematical model of the ship's dynamics. When possible, track plots of the simulated ship and the full-scale ship for the same maneuver are compared. The results are simulated trajectories of ship passages through a prospective waterway configuration in the same manner that the ship would be piloted under a variety of operational and environmental conditions if the configuration actually existed. Simulation can be accomplished using human pilots (real-time simulation) or using a computer-based pilot simulation (fast-time simulation). The mathematical pilot model used in fast-time simulation is often referred to as an autopilot, a term that can also refer to automatic equipment used to steer a ship on programmed courses or tracks.
Shiphandling simulators also include the other components shown in the simplified block diagram (Figure 3-1). Because the behavior of the ship is now represented by a computer model, the waterway must also be represented in a compatible (that is, numerical) fashion. Most shiphandling simulators include more extensive means of recording the results of pilotage than exist on an actual ship because the tracks and other information generated during the simulation are to be used in the waterway evaluation and design process.
Although modeling of ship behavior usually consists of a computer-based, mathematical model of the ship's dynamics, simulation facilities using physical scale models of vessels and waterways are also in operation. They have been used to aid in waterway design and results have been considered beneficial, particularly for addressing hydrodynamic factors. Physical model systems are generally constrained by physical and operating characteristics of vessel models on hand (or specially constructed for the simulation), waterway configurations that can be modeled at the facility, and if an outdoor facility, lack of control over external forces such as wind. Furthermore, the reaction times on reduced scale physical models are much faster
than on the full-scale prototype. With regard to time scales, the pilot would in theory respond as if in real life but at an accelerated pace. However, artificial behavior could be induced through the ability to see quickly the results of maneuvering commands. The actual effects of all these differences on the faithful reproduction of ship maneuvering behavior by the pilot and resulting simulated trajectories are not known. As a result, most simulators developed in the last decade have been computer-based, which permits mathematical alternation of vessels and waterway configurations. These simulators are the subject of this report.
RELATIONSHIP BETWEEN SIMULATORS AND THE DESIGN PROCESS
The many factors involved in designing a waterway, including civil engineering aspects, navigational aspects, and sociopolitical aspects, are discussed in Chapter 2. Indeed, a considerable history exists of designing waterways by design codes rather than by a detailed analysis. However, design codes are usually quite generous in their dimensions and undergo considerable refinement (and thus cost reduction) if credible analyses of the alternatives can be performed.
Fundamental to assessing how simulation can contribute to the design process is understanding the type of information that simulation attempts to provide. Fast-time simulation (also referred to as compressed-time simulation) provides the designer with many swept paths for the design vessels under a wide variety of conditions within the waterway (tide, current, wind, speed limits, and so on) in a compressed time frame. This information corresponds to, and replaces some of, the graphical constructions used in the simplified approach to channel design. Fast-time simulation can also be helpful in determining maneuvering lane width and overall waterway geometry early in the design process. Fast-time simulations are sometimes used to screen various design configurations for those that will be assessed through the more time-intensive real-time simulations. Real-time simulation (also referred to as full-mission simulation) uses qualified pilots to maneuver the simulated vessel through the modeled waterway using a true-to-life time scale. These simulations can be used in calibrating the pilot model for fast-time simulations, answering questions concerning navigational aids, and assessing piloting under difficult situations (complex bathymetry or environmental conditions, passing bridges or other marine traffic, and so on) where human decisions are critical.
The thrust of simulation in waterway design is to assess the risk to life, property, and environment of passage either for a new waterway or for an existing waterway (perhaps with new ships) without incurring either those risks or the costs of obtaining this information from real-life experience.
For convenience of discussion, assume that it is possible to make a simulator predict exactly the path of a given vessel in a given waterway with a given pilot. A program of simulated passages designed to provide a detailed assessment of risk of passage for the given waterway could, for example, involve simulating the voyage of every conceivable ship that would ply the waterway during its lifetime, under every conceivable state of the environment and traffic, and under the pilotage of all manner of pilots. Even if one could afford the cost of mounting such a program, the time required would be comparable to the lifetime of the waterway. Although this time would be significantly reduced if the real-time runs were mostly replaced by fast-time simulation, such a program would still be impractical.
The committee believes that applying simulation in waterway design relies on the following inherent working assumption:
A limited number of simulations using a less-than-perfect simulator, a few select (design) ship types, a few select environmental conditions over extreme ranges characteristic of the local area, and a few pilots with representative local expertise and shiphandling proficiency are sufficient to obtain a useful appraisal of waterway design.
Evaluations of such simulations rely heavily on professional judgments and experience to identify or clarify design deficiencies, detect unforeseen problems, and determine areas where refinements would optimize the design to reduce costs without compromising safety. It may be possible to relax this assumption through the combination of real-time and fast-time simulations.
The validity of this assumption is critical to the efficacy of simulations as a design tool. Similar engineering assumptions are made in other fields with satisfactory results. For example, the design of an offshore platform requires the estimation of the worst loads that will be exerted on it during its lifetime (for example, loads experienced in a storm with a return period of 100 years). Statistical methods have been developed to estimate these loads from a limited environmental history and from limited model test results or analytical computations.
Conceptually, the undertaking of a limited program of simulations to appraise designs falls within accepted engineering practices. If a limited program is used, the relative accuracy or detail of each of the four elements (simulator, type of ships, waterway environment including vessel traffic, and pilots) must in some sense be balanced. The cost of a simulation program increases almost linearly with the scope of the program after the simulation model is set up. The design of a simulation program is therefore generally focused on determining the minimum scope of the simulation program necessary to make a meaningful risk assessment for a given design (or set of design alternatives). To accomplish this goal, the program is usually biased toward combinations of elements that will strain a waterway
the most. The assumption is that if the waterway is satisfactory for these combinations, it certainly will be for other combinations that do not strain the waterway as much. Interpretation of the results must reflect the biases inherent in these choices. For instance, for many waterways the designer can anticipate traffic composed of a wide variety of ship types, some of which are not yet in existence. Some of the anticipated traffic may include small, maneuverable vessels that will ply the waterway with ease no matter what the waterway design; other traffic consisting of very large ships with limited maneuverability in restricted waters may strain the waterway depth limits, the maneuvering lane widths, or both. These latter ship types and cargoes carried often have potential for significant consequences (typically channel blockage or pollution) should accidents involving them occur.
Typically, research is directed toward the application of a specific ship to an existing waterway or a waterway to be constructed. In other cases, when many different ship types are involved, the selection of the ship or ships to be used in simulation is subjective, relying heavily on experience. Ideally, the selection is based on the input of pilots who are familiar with the area of the proposed waterway and who are qualified to pilot the types of ships to be simulated. If local pilots do not have experience with the simulated vessel, pilots from other areas with the necessary ship maneuvering expertise could be included in the study. Ship selection must also involve some description of the loading conditions of the ships, because the behavior of a fully loaded ship with small under-keel clearance will likely be very different from that of the same ship, lightly loaded, with a large under-keel clearance and more subject to wind loadings.
Designers may also anticipate and design for increased risk of an accident during severe environmental conditions (for example, storms, high currents), which could severely strain the skills of even the most experienced pilot. Like the selection of ships for simulation, selection of these additional factors ultimately is made subjectively. In the past, many questions and some controversy have arisen about what can be reasonably assumed for pilot control and skill in the selection of weather conditions, aids to navigation, and dimensions of waterways. This uncertainty is especially true when estimated ship trajectories are developed by simplified analytical schemes that do not put qualified pilots in the simulation process. The same controversy also applies to trajectories estimated from fast-time simulations. By using experienced ship handlers in a real-time simulation and presenting them with an adequately realistic situation, the question of applied skill level of the pilot is addressed, if not fully answered.
Real-time simulation with human control is gaining acceptance throughout the world as a useful aid in harbor and waterway design. Some of the many applications to date are discussed in Appendix C. Although its acceptance has been slowly and steadily increasing, there is no consensus amongst
designers concerning its usefulness, even though it has been used as a tool in early development stages of some waterway designs (Norrbin et al., 1978; Ottosson and van Berlekom, 1985; Puglisi, 1988; Simoen et al., 1980). Reasons for the apparent reluctance to use simulation for concept development include:
-
cost and time requirements;
-
the validity of the modeling; and
-
interpretation of results.
In addition, some waterway designers may not be comfortable with changes from traditional techniques with which they are very familiar to a process that not only may not be familiar to them but also would expand participation beyond the traditional design community.
Because real-time simulation is human resource intensive, the capability for quickly modifying inputs to the mathematical model which describe the waterway and its environment is desirable to facilitate assessment of design alternatives. There sometimes is difficulty in achieving this objective depending on the waterway under examination. From an examination of several case histories where simulation was used (see Chapter 7; Appendix C), it appears that these objections are not exaggerated, although the difficulties did not prevent project sponsors from acquiring valuable technical and design data. In time, as users become more familiar with the tool and its use is refined, simulation may play a more important role in design, particularly much earlier in the process.
Special design problems for which real-time, human-controlled simulation appears particularly suitable are the following:
-
determining a pilot's ability to assess the vessel's position in relation to horizontal dimension requirements, including the value and placement of navigation aids;
-
evaluating traffic density limitations;
-
optimizing side clearance dimensions for a vessel of a given size;
-
maneuvering actions, including docking and undocking; and
-
optimizing bend and turn dimensions for a vessel of a given size.
All of the above considerations are important in waterway design, and all are almost totally dependent on applied pilot skill. Heretofore these problems have been addressed mostly on the basis of opinion without a means of quantification other than full-scale testing.
Sometimes the resolution of design problems has been as much political as technical, necessitating extensive efforts to achieve a consensus between parties with conflicting views. The committee found that where used (see Chapter 7; Appendix C), simulation has been a unique way to test opinions on specific designs in a focused and clearly visual way. Further-
more, real-time simulation has in some cases helped to build consensus in the design process by providing a realistic presentation of problems that is understandable to all interested parties.
SUMMARY
Simulation is a technology used for predicting the track of a ship in a waterway either by using qualified pilots (real-time simulation) or a pilot model (fast-time simulation). Typically, simulation runs primarily reflect situations that will most stress the waterway and the number of these runs that can be made is limited. Nonetheless, useful technical information concerning the vessel track can be obtained, and consensus building among the conflicting parties in the waterway design can be achieved.








