
2
Methods for Characterization
Information about the orbital debris environment is needed to determine the current and future hazard to space operations from debris. Unfortunately, the debris environment is difficult to characterize accurately. Only the largest debris objects can be repeatedly tracked by ground-based sensors; detection and tracking of the numerous smaller pieces of debris is much more difficult. A variety of measurement techniques have been developed, however, that enable statistical estimates to be made of the number and characteristics of some size ranges of smaller debris items in some orbits. These estimates rely on scientific and engineering models of population characteristics. More complex models are used to estimate the characteristics of the future debris population.
TRACKING AND CATALOGING ORBITAL DEBRIS
Current Capabilities
A small percentage of debris in orbit is tracked and cataloged. The orbital parameters (e.g., period, inclination, apogee, and perigee) of these objects are entered into a catalog, generally along with information on the object's origin—only objects with known origins are entered into the catalog—and its radar or optical cross section. These data can then be used for such purposes as predicting potential collisions and recognizing space object breakups. Cataloging space objects requires an expensive network of sensors capable of observing objects periodically to determine any changes in their orbital elements and of continually performing orbit determination computations.
Currently, only two systems in the world have the necessary network of ground-based sensors and computational capability to carry out this task. One, the Space Surveillance Network (SSN), is operated by the United States under the control of the U.S. Space Command; the other, the Space Surveillance System (SSS), is operated by the Russian military (see Box 2-1). The primary purpose of each system is to detect objects that present a military threat; thus, although each is capable of detecting certain types of debris, neither system is optimized to perform the task of maintaining a debris catalog.
|
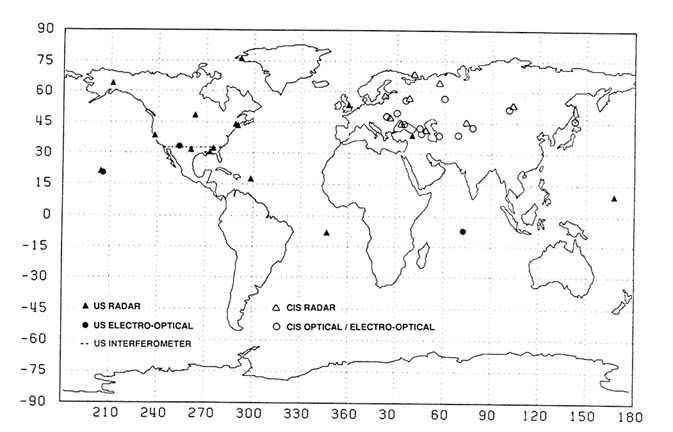
BOX 2-1 The Russian and U.S. Space Surveillance Systems Figure 2-1 displays the location of the sensors of the Russian and U.S. space surveillance systems. The Russian Space Surveillance System (SSS) has a primary data acquisition system that includes 10 radars (operating in either UHF [ultrahigh frequency], VHF [very high frequency], or C-band) and 12 optical and electro-optical facilities. The radars are used to track objects in lower orbits; the optical and electro-optical facilities are used only for tracking objects in high orbits. Additional sensors may be used occasionally for important tasks and experiments. The lack of a worldwide network of sensors results in some major breaks in observation and some zones in which space objects cannot be observed. Data from the sensors (approximately 50,000 measurements per day) are transmitted to the Russian Space Surveillance Center, where they are processed, and the space object catalog is updated and replenished. The Russian Space Surveillance Center also identifies detected objects, updates space object orbital elements and calculates orbital elements sets for new observations, plans future observations, determines orbital lifetimes, and provides information to other space programs (Batyr et al., 1993; Batyr et al., 1994). The U.S. Space Surveillance Network (SSN) consists of more than 20 radar and optical sensors, most of which are not dedicated to space surveillance and are tasked on an ''as-needed" basis. In general, radars are used to track objects in low-altitude orbits and optical sensors are used for high-altitude detection; some radars, however, are deep-space sensors capable of detecting objects in GEO. Although many of the SSN's sensors are located within the continental U.S., others are spread out longitudinally. Data from the network are fed to the U.S. Space Control Center, which processes the data and maintains a catalog of space objects. Orbital element sets are transmitted back to the sensors to allow them to continue tracking detected objects and are also made available to selected satellite operators and space system users. The Space Control Center also processes space object breakup data and performs collision warning for some space activities, such as launches and U.S. Space Shuttle operations in orbit. |
The ease with which a particular space object can be tracked depends on its optical or radar cross section (RCS) as well as its orbital parameters. In general, objects with larger optical or RCSs are more easily detectable than objects with smaller cross sections. Both the optical and the radar cross sections of particular space objects can vary greatly—which is not surprising for a collection of irregular-shaped objects. Uncertainty in the relation of RCS to actual size means that the smallest objects that these systems are able to catalog is uncertain, but since few objects in the SSS or SSN catalogs have an RCS of less than about 0.01 square meter, the commonly reported minimum trackable size has been 10 cm in diameter.
Recent radar range calibration of fragments produced in the laboratory, combined with measurements by short-wavelength radar and by ground telescopes (Henize and Stanley, 1990), have provided additional insight into the limiting size of the objects maintained in the catalog. These data indicate that for LEO orbital inclinations above about 30 degrees, the U.S. catalog contains some objects as small as 10 cm but is not complete at this size range. The catalog for LEO objects with inclinations greater than 30 degrees, however, is estimated to be 90 to 99 percent complete for objects larger than 20 cm.
As orbital altitude increases, the minimum size of debris that can be detected by ground-based sensors increases. However, this does not mean that the minimum-sized object that can be cataloged increases steadily with altitude. The opportunity for repeated observations and the predictability of an object's position in orbit also increase with altitude, making the maintenance of the orbital elements of a high-altitude detected object easier. Consequently, for altitudes below about 2,000 km, there is no simple statement of the limiting size of the catalog, other than that it is in the 10- to 30-cm range. However, radar detection sensitivity rapidly decreases with increasing altitude, and by 5,000 km the smallest
|
BOX 2-2Comparison of the SSN and SSS Catalogs The U.S. and Russian space object catalogs are in general agreement for LEO objects greater than 50 cm in diameter. For space objects with diameters between 10 and 50 cm, the U.S. catalog is more complete. Above LEO, both catalogs generally maintain the orbital elements only of spacecraft and rocket bodies greater than 1 meter in diameter. Due to the lack of a worldwide network of sensors, the Russian space object catalog does not include objects in a significant portion of GEO and can only periodically track objects in highly eccentric, low-inclination orbits. |
objects detectable by radar are about 1 meter in diameter. Above 5,000 km, optical telescopes become the primary sensors; these have the sensitivity to track meter-sized objects in GEO—though this does not mean that all meter-sized objects in GEO are cataloged.
Current space surveillance systems have difficulties in cataloging some space objects in highly elliptical orbits and low-inclination orbits. Objects in highly elliptical orbits are difficult to detect because they spend a large fraction of their time at very high altitudes, while objects in low-inclination orbits are more difficult to detect because of the relative lack of sensors (in either network) at low latitudes. Recent experiments by the U.S. Space Command confirmed the SSN's difficulty in cataloging space objects in low-inclination and high-eccentricity orbits (Pearce et al., in press; Clark and Pearce, 1993). It should be emphasized that these peculiarities do not represent deficiencies in the way the networks perform their normal mission of maintaining a catalog for military reasons, but rather reflect the fact that they were not designed to characterize the space debris population.
Improving Tracking and Cataloging Capabilities
International cooperation might present an opportunity to make some improvement in the catalogs without significant expenditure. The SSS and the SSN both routinely track objects not found in the other's catalog, so sharing catalog data will improve the completeness of both catalogs. (It is not at all clear, however, that sharing catalog data would increase the accuracy with which the orbital parameters of cataloged objects are known.) Since both the SSS and the SSN have similar limitations, it is already clear that information sharing between the two systems would not significantly increase the size of the catalog or improve detection of medium-sized debris. There is also a potential obstacle to such collaboration in that there are legitimate security reasons for not sharing all data received from national surveillance networks; this may not be a major issue because both networks are capable of editing data before sharing them.
One factor that limits the ability of most space surveillance sensors to detect smaller debris is that they were not designed to detect small objects. Most space surveillance radars operate in the UHF and VHF ranges; debris smaller than about 10 cm in diameter are in the Rayleigh scattering region for these frequencies and are thus not easily detected, and the record of their orbital elements is not easily kept current. A National Aeronautics and Space Administration (NASA) study on the possible protection of the Space Station against debris concluded that 10 cm was an inherent limit for the current sensors of the SSN and that these sensors
could not easily be modified to improve sensitivity (NASA, 1990). The Russian SSS is currently working to increase its capability to observe small objects with existing sensors, focusing research on lowering the sensitivity thresholds of its current radars and on developing new methods to acquire weak signals using narrow-angle and narrow-beam sensors and making full use of existing data regarding the space object's motion. While this research may allow the SSS to track somewhat smaller debris, radars operating at much shorter wavelengths (e.g., 3 cm wavelength to detect 1 cm diameter objects in LEO) will ultimately be required to detect debris significantly smaller than 10 cm in diameter.
Increasing the accuracy of predictions of the future location of objects in LEO is another means of improving tracking and cataloging capabilities. Such improvement is a necessary requirement for the development of an effective collision warning capability in LEO; increased accuracy is required to keep the number of false alarms for such a system low, since moving spacecraft is a task not undertaken lightly. (Collision warning schemes are discussed in some detail in Chapter 7.) Currently, uncertainty in the future location of objects due to atmospheric drag is the major limitation on catalog accuracy in LEO. This unavoidable uncertainty is due to variability in the density of the upper atmosphere and uncertainty about objects' orbital attitude (and thus the cross-sectional area they present to the atmosphere) and normally dwarfs inaccuracies caused by observation errors and errors in propagation theory. As is shown in Figure 2-2, atmospheric drag retardation along the orbital track of medium to large space objects in 300- to 600-km-altitude orbits can range up to hundreds of kilometers per day.
The most optimistic estimate of the accuracy with which atmospheric drag can be determined is ±15 percent; consequently a prediction error (which cannot be calibrated) of several kilometers per day is typically accumulated. Keeping the number of false alarms for a LEO collision warning system at a tolerable level thus requires frequent reobservations of debris objects. (Collision warning systems for objects in regions where atmospheric drag is less critical would not have this limitation; in GEO, for example, errors in estimates of objects' initial positions would be responsible for the majority of false alarms.) Improvements in propagation accuracy could be achieved by positioning sensors to minimize the required propagation time and by improving understanding of upper-atmospheric density fluctuations.
Improving the ability to track and catalog objects in orbits above LEO is basically a matter of improving the sensors (both radar and optical) used to detect high-altitude objects and acquiring enough data from these sensors to determine the orbital parameters of the objects they detect. Detecting objects that are less bright (because they either are smaller,
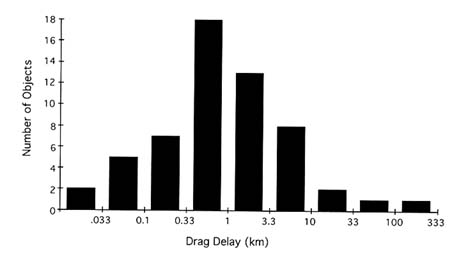
FIGURE 2-2 One day along-track drag retardation for a random sample of cataloged objects at 300–600 km. SOURCE: U.S. Naval Space Command Satellite Catalog.
are further away, or have a lower albedo) might be accomplished with either larger-aperture telescopes or telescopes equipped with charge-coupled devices (CCDs). Siting debris-detecting sensors at low latitudes could allow a broad variety of objects, including those in low-inclination orbits, to be detected. Finally, increasing the number of sensors available to detect debris would allow for better tracking of cataloged objects and for more searches for uncataloged objects.
|
BOX 2-3 Detecting Debris with CCDs Charge-coupled devices can be used in optical sensors to convert incoming light directly to electric charges; the magnitude of the output signal is proportional to the light intensity. CCDs have not yet outperformed conventional sensors for detection of objects in LEO because the rapid movement of LEO objects requires that the signal be integrated, which in turn requires an assumption of direction of motion, severely limiting the detection rate. CCDs are improving, however, and are already outperforming non-CCD sensors for observation of high-altitude debris (which does not move as rapidly across the field of view). Upgrading the SSN's GEODSS (ground-based electro-optical deep-space sensors) to use CCDs has been considered. |
SAMPLING ORBITAL DEBRIS
Since it is currently impossible to track all debris in orbit, measuring and characterizing the uncataloged debris population must be carried out by sampling the debris flux at particular locations and times and using the data as a basis for estimating the characteristics of the general population. The orbital debris flux can be sampled either directly (with spacecraft surfaces that are later returned to Earth for examination) or remotely (using ground- or space-based radars or optical telescopes that record debris as it passes through their fields of view). Although sampling—combined with predictive models—can be used to provide important clues to the nature of debris populations that are not included in the catalog, it is important that the limitations of the technique, including any sampling biases, be taken into account. For example, rather than portraying the steady-state small debris population in LEO, in situ measurements of small debris particles acquired by examining returned spacecraft surfaces portray only the average debris flux along a particular orbit during a particular time frame.
Remote Sampling from Earth
Optical Sensors
At first glance, the use of ground-based telescopes to sample the debris population seems like a promising technique. Such sampling is usually carried out by pointing the telescope in a fixed direction and counting objects as they pass through its field of view. A 1-meter diameter telescope in darkness can theoretically detect a sunlit metal sphere 1 cm in diameter at 900-km distance. If this were all there was to the problem, data from optical sensors could be used to estimate the population of objects larger than 1 cm in diameter in orbits up to 900 km.
Unfortunately, most debris fragments reflect much less light than a metal sphere; typically only about 10 percent of the light is reflected. In addition, objects in LEO have angular velocities of at least 0.5 degree per second when viewed from the ground, which further increases the difficulty of optical detection. Finally, there can be difficulty in discriminating between debris and the luminosity caused by meteors interacting with the atmosphere. Theoretically, this last problem can be solved completely by using two telescopes and determining the object's altitude with the measured parallax, or solved partially by using the object's angular velocity to approximate its altitude.
Despite these drawbacks, ground-based telescopes engaged in sampling have provided some valuable information on the LEO population of debris around 10 cm in diameter. Tests to detect uncataloged debris in
LEO with ground-based telescopes have been carried out by NASA (in cooperation with the Massachusetts Institute of Technology's Lincoln Laboratory and the U.S. Space Command) since 1983. These tests used electro-optical telescopes of approximately one 1-m diameter and, as mentioned earlier, aided in the determination of the approximate size ranges of debris contained in the SSN catalog. Although the exact size of debris detectable by these telescopes is not certain since they measure pieces of debris with a variety of unknown reflectivities, the average minimum object size detectable is slightly smaller than 10 cm (Kessler, 1993).
Ground-based telescopes also can be used to sample the space debris population above LEO. The limited efforts to sample the HEO population to date include surveys of GEO by the Russian Academy of Sciences and NASA, and surveys of GTO performed by ground-based electro-optical deep-space sensors sites. Tests to observe objects in the geostationary orbit with ground-based optical sensors have detected uncataloged objects, but there have been no comprehensive surveys of the geostationary ring and the size of its uncataloged population remains unclear.
Many of the features suggested earlier for improving the tracking and cataloging of high-altitude debris using optical sensors (e.g., larger apertures, low-inclination sites, or the use of CCDs) would also be useful for sampling the debris population. One additional feature particularly useful for sampling is a wide field of view, which gives an optical sensor the ability to sample large areas and thus gather more data. This is very useful in optical sensing, where the need for good lighting conditions can severely limit the hours a telescope can be used to look for objects in Earth orbit.
NASA is beginning to use a 3-m diameter "liquid-mirror" telescope to sample the debris population. Large liquid mirrors can be constructed relatively inexpensively because they use mercury, spun to keep it in the necessary parabolic shape, to form their reflecting surface. Such telescopes are constrained to always point vertically; although this makes some types of observation difficult, it does not hamper debris sampling. NASA finished construction of its first liquid mirror, which will operate within the United States, in 1994 and has already obtained stellar images from the telescope's temporary site in Houston. A second liquid-mirror telescope to be sited near the equator is planned. These telescopes should be able to regularly detect debris down to about 2-cm diameter at altitudes up to 500 km.
Radar Sampling
Short-wavelength ground-based radars also have been used effectively to sample the medium-sized debris population in LEO. Radars
sample debris in a "beam park" mode (similar to the sampling technique used by ground telescopes), in which the radar stares in a fixed direction (preferably vertically to maximize sensitivity) and debris is counted as it passes through the radar's field of view. Since 1987, significant amounts of sampling data have been obtained by using the Arecibo, Goldstone, and Haystack radars. In addition, the longer-wavelength FGAN and MU radars have demonstrated the ability to sample the medium and large debris population, respectively (Mehrholz, 1993; Sato et al., 1992).
In 1989, the Arecibo Observatory's high-power 10-cm-wavelength radar and the Goldstone Deep Space Communications Complex's 3-cm-wavelength radar were used (with the assistance of other radars) to obtain orbital debris data. Neither radar was designed to track debris, but both were expected to detect small debris if it existed. In 18 hours of operation, the Arecibo experiment detected nearly 100 objects larger than an estimated 0.5 cm in diameter (Thompson et al., 1992). In 48 hours of observation, the Goldstone radar detected about 150 objects larger than approximately 0.2 cm in diameter (Goldstein and Randolph, 1990). Because little effort was made either to accurately define the collection area of these radars or to properly calibrate them, these data have fairly large uncertainties. Even so, these experiments demonstrated that data could be obtained in a beam park mode and that there was a large population of smaller debris to be detected.
Since 1990, more than 2,400 hours of data have been collected and analyzed from the Haystack radar (Stansbery et al., 1994). This 3-cm-wavelength radar situated at 42°N latitude can be pointed either vertically or south, 10 or 20 degrees above the horizon. In the vertical mode, maximum sensitivity is obtained, but detection in LEO is limited to orbits with inclinations greater than 42 degrees. When the radar is pointed south, sensitivity is poorer, but LEO objects with inclinations as low as 25 degrees can be detected. The complete data set from the Haystack observations contains information on the size, altitude, range rate (the rate of change in the distance from the object to the radar), and direction of motion of debris at altitudes up to 1,500 km. The data on the direction of motion can be used to determine an object's orbital inclination with a typical uncertainty of about 5 degrees (though uncertainty can be much higher for objects that are barely detectable). The range rate data can be used to determine orbital eccentricity when pointed vertically and inclination when pointed near the horizon. In the vertically pointing mode, the smallest objects detected range from about 0.3 cm at 350 km to 0.7 cm at 1,400 km. In the south-pointing mode the smallest objects detectable are larger—typically about 1 cm. Haystack transmits right circularly polarized radio waves and receives both left and right circularly polarized
waves. The polarization of the reflection can be used to infer the general shape of the objects detected.
Calibration of the data acquired by using sampling radars can be achieved by a number of techniques. These include radar range measurements of fragments of known size, shape, and mass, and the use of orbital calibration spheres. The Haystack radar used both of these techniques. In this case, the range measurements indicated that irregular fragments reflected similarly to spheres but a broad distribution of possible signal returns must be considered in interpreting the data. Existing calibration spheres, as well as the Orbital Debris Radar Calibration Spheres (ODERACS), were also used in calibration.
Future efforts to sample the debris population with ground-based radars may be the most effective means to collect data on medium-sized debris in LEO. Improvements in this capability can be achieved by (1) performing more debris sampling with existing radars; (2) siting new radars so they can detect low-inclination debris populations; and (3) using high-powered, short-wavelength radars to detect smaller debris.
Increasing the amount of time that radars spend sampling debris is basically a problem of allocating the resources needed to carry out additional searches. Continued sampling efforts with existing radars can increase statistical confidence in existing data and, over time, could provide information on changes in the debris population. However, the Haystack, Goldstone, and Arecibo radars, which were not designed to detect debris, have other users preventing them from being used full-time for debris detection and are expensive to operate. For these reasons, the Haystack Auxiliary Radar (HAX) was recently built specifically to detect debris. HAX, which is located near the Haystack radar, will not be as sensitive as Haystack, but its slightly larger field of view and lower
|
BOX 2-4 The ODERACS Experiment The ODERACS experiment was launched from the U.S. Space Shuttle in March of 1994 and provided calibration for a number of Earth-based radar and optical sensors. In this experiment, six aluminum spheres (two 5 cm in diameter, two 10 cm in diameter, and two 15 cm in diameter) were released into LEO. One sphere of each type had a polished surface whereas the other had a rough surface. This experiment demonstrated the validity of sampling debris with a radar and helped calibrate both radar and optical sensors. A similar future experiment will release three spheres and three dipoles to further calibrate the sensors. The dipoles are intended to calibrate polarization measurements, which are important for determining debris shape. |
operating costs will allow data on low-altitude, medium-sized debris to be collected more rapidly and at a lower total expense. Data collection from this sensor began in 1994.
Locating a similar short-wavelength radar near the equator could further improve radar debris sampling over the capability of the HAX. Such a sensor could sample the entire LEO population, rather than just those objects with higher-inclination orbits. Comparisons between the populations detected by HAX and an equatorial sensor could also help illuminate the distribution of uncataloged debris by inclination.
Higher-power and shorter-wavelength radars might also improve sampling capabilities, although there are limits to such a strategy. A high-power, 1-cm-wavelength radar with a large antenna, for example, would be capable of acquiring data on debris as small as 0.1 cm in LEO, but the construction and operation of such radars could be very expensive. It is not feasible to detect even smaller debris from Earth by further decreasing the radar wavelength because the Earth's atmosphere absorbs radar signals with wavelengths smaller than about 1 cm.
Remote Sampling from Orbit
Remote sampling of debris from orbit could provide data on debris that are very difficult to detect from Earth, but there are a number of difficulties, both technical and economic, in such an approach. The major advantages of space-based sensors are that they can be much closer to orbital debris than ground-based sensors and that they do not have to peer through the Earth's atmosphere to see the debris. Their major disadvantage is the difficulty and cost of developing and deploying the powerful sensors typically required to detect these relatively small, fast-moving, and often dark objects.
Although no space-based remote sensor has yet been dedicated to debris observation, debris has been detected in the course of space-based astrophysical observations. The Infrared Astronomical Satellite, which was designed to image deep-space infrared sources, detected possible debris objects down to 1 mm in size at distances of up to 1,000 km, but difficulties in calibrating the sensors make extrapolating these results to the general population very problematic (de Jonge, 1993). The White Light Coronagraph on Skylab and the Hubble space telescope are also likely to have detected debris, but their data have not been analyzed for this purpose.
Many additional space-based remote sensors to detect debris have been studied and proposed since the late 1970s (Kessler and Cour-Palais, 1978; Neste et al., 1982). Among these are proposals by Russian experts, who proposed using space-based optoelectronic sensors to detect debris
|
BOX 2-5 Space-Based Remote Sensing of Debris: An Example In late 1987, NASA began work on a proposal to detect 1-mm to 1-cm debris in LEO with a space-based electro-optical sensor. The project was called ''Quicksat" because, to obtain a free rocket launch, the instrument had to be constructed rapidly. To obtain an expected detection rate (in a 500-km, sun-synchronous orbit) of about 200 objects per year, the initial design incorporated two 40-cm-diameter, F/1.0 telescopes using 500 by 500 CCD pixel arrays and separated by 1 meter to obtain usable parallax data. However, without on-board data processing, data transmission for this design was much too high. Consequently, fewer and larger pixels were required; however, this significantly increased the separation distance required for the two sensors to make parallax measurements. By optimizing the size, position and readout rate of the pixels, Quicksat was redesigned into two 25-cm-diameter, F/1.0 optics with 9 by 16 pixel arrays, decreasing the spacecraft mass by 200 kg and increasing the expected detection rate by a factor of 10. However, the cost of building and integrating the Quicksat satellite was estimated at more than $100 million; by 1988, the free rocket was unavailable and the project was canceled. |
(Utkin et al., 1993); German experts, who proposed flying optical sensors on a space station or the U.S. Space Shuttle (Bendisch et al., 1993); and U.S. experts. In the United States, NASA (working with Ball Corporation) has done extensive work on an infrared system for debris detection and collision warning for the Space Station and has proposed a spacecraft (see Box 2-5) with two small telescopes capable of monitoring the 1-mm and larger environment (Portree and Loftus, 1993). In addition, Kaman Sciences Corporation has proposed an optical (visible and infrared) debris detection and characterization system for use on the U.S. Space Shuttle, and the U.S. Department of Energy's National Laboratories (specifically Sandia, Los Alamos, and Livermore), along with several companies, have each proposed various sensors (including radar, infrared, optical, and LIDAR) as potential space-based debris detection sensors. In early 1995, the U.S. Department of Defense plans to launch its MSX (Midcourse Space Experiment) spacecraft, which will use ultraviolet, infrared, and visible light sensors developed for other purposes to search for uncataloged debris.
Both passive or active remote sensors in orbit could theoretically be used to detect debris. Passive sensors (such as telescopes) detect objects by using existing illumination (such as reflected sunlight or the infrared radiation emitted by heated objects). Active sensors (such as LIDAR or radar) illuminate an object and detect the reflected illumination. One advantage of active sensors is that a single active sensor can accurately
determine an object's range and the rate at which the range changes. In contrast, two passive sensors are needed to determine the range of an object, and even in pairs, current passive sensors would have difficulty in accurately determining the rate at which the range changes. This does not rule out the use of passive sensors for debris detection, however, because range and range rate determinations, while helpful in understanding the data collected, are not essential to obtaining useful data. Passive sensors also require less power than active sensors and have a smaller loss of sensitivity with range, so they are typically less expensive and will detect more objects than active sensors.
Since larger objects are easier to detect, the collection area of orbital remote sensors increases with increasing debris size. Although theoretically this should allow these sensors to detect a statistically meaningful sample over a large range of debris sizes, there are practical limitations, particularly in LEO. For example, small debris can be detected only so close to the detector that (in LEO) the expected high velocity at which the objects will pass across the field of view requires rapid readout rates, which increases noise for certain optical systems and increases the required data transmission rates for any system (unless on-board processing is used). For these reasons, it is currently difficult to observe small debris in LEO with space-based remote sensors. In contrast, debris larger than 1 cm can be detected at considerable distances, so the problems caused by movement across the sensor's field of view are much less severe. However, in the lower regions of LEO, it is more practical to detect debris in this size range from the surface of the Earth (because of the larger sensors available on the ground). Ground-based sensors may even be superior for the task of detecting LEO debris significantly smaller than 1 cm in diameter; the largest available ground-based radar used to detect debris (the goldstone radar) can detect debris as small as 2 mm in diameter. Consequently, space-based remote sensors are likely to add significantly to our knowledge of the LEO debris environment only at higher LEO altitudes and in latitude bands that are not adequately characterized by ground-based sensors.
Space-based remote sensors offer more promise in HEOs, particularly GEO. At high altitudes, space-based sensors would be much closer to the debris being detected than Earth-based sensors and would have to detect only objects smaller than about a meter in diameter to improve on current measurements. In addition, objects in GEO would move relatively slowly across a sensor's field of view, greatly simplifying detection. However, either multiple sensors or sensors able to move along the geostationary ring would be needed to observe objects throughout GEO.
Impact Sampling
Currently (and for the foreseeable future), space debris particles smaller than a few millimeters in diameter cannot be detected by using Earth-based measurement techniques; effective remote sensing of such particles from orbit may also be infeasible. In situ impact techniques, however, can be used to sample this population effectively, characterizing particle sizes and materials as well as orbital distributions and dynamics (although such characterizations can be extremely difficult). Such measurements can be performed either passively, by exposing surfaces in orbit and then returning them to Earth for examination, or actively, by using any of a number of techniques ranging from impact detection with simple semiconductor-based sensors to chemical composition analysis of impacting particles with complex sensors.
There are a number of limitations on all current approaches to in situ debris sampling. First, impact detectors can sample only debris that intersects the orbit in which they are traveling. Second, the extent of the environment measured (in terms of the particle sizes that can be expected to impact the detector) and the statistical validity of the data are both dependent on the detector's total exposed area and the exposure time. Third, some measure of the impacting particle's velocity vector or its composition is needed to identify specific sources of impacting particles (i.e., whether they are meteoroids or orbital debris), and knowledge of the particle's velocity vector is also necessary to determine its pre-impact orbital parameters. Such knowledge is, however, difficult to acquire.
Passive Measurements
Passive in situ measurements of the debris environment are made by exposing samples of materials to the space environment and then returning them to Earth. Once on the ground, craters and perforations in the materials are measured and the diameters and impact velocities of the particles that caused this damage are estimated. Such data have been collected from the Apollo capsule windows, from Skylab exposure experiments, from U.S. Space Shuttle windows, from materials returned from the Solar Maximum Mission spacecraft, from the Salyut and Mir space stations, from the Palapa and Westar spacecraft, from LDEF, and from the European Retrievable Carrier (EURECA). Most recently, materials returned from the repair of the Hubble space telescope were made available for assessment.
Although these represent a significant number of surfaces over an extended period of time, the value of the data gathered in these experiments is limited. First, all of these data were acquired at altitudes be-
tween about 300 and 600 km; consequently, little is known about how the small debris population varies with altitude. Second, few of the surfaces returned to Earth for analysis have been adequately calibrated against one another; this makes analysis of variations in the impacting population over time difficult. In addition, passive sensors provide only integrated time-exposure data rather than time-dependent data, so little can be determined about the effects of solar activity on the small debris population or the existence and location of debris "swarms." Finally, because the majority of returned surfaces were not designed for debris testing, it is often difficult to distinguish between the impacts of orbital debris and micrometeoroids.
The applicability and validity of the damage scaling laws used to interpret the data from passively exposed detector materials are also an issue. Historically, the damage scaling laws used to estimate impactor characteristics from a surface crater or perforation have been derived empirically or are semiempirical. Different sets of scaling laws for interpretation have been applied to every set of impact data returned to date, and multiple different scaling laws (e.g., McDonnell and Sullivan, 1992; NASA, 1970) were used for LDEF and EURECA. Interpretations of impactor size by these different scaling laws vary by up to about a factor of three for typical "theoretical debris parameters" (e.g., spherical aluminum projectiles impacting an aluminum surface at 10-11 km/s); for impacts outside this regime (such as impacts of steel or tantalum objects) the variations can range up to a factor of about 15 or more. Since the main basis of models for the sizes of small debris particles comes from these data, improving scaling laws may be an effective means of improving models of the debris environment. Recently there has been some effort toward this end. LDEF debris experiments emphasized the need to acquire chemical data on impact features; such data helped to improve damage models as well as estimates of the debris population. LDEF experiments also resulted in the development of a consistent set of physics-based scaling laws for all velocities and ductile materials (Watts et al., 1993). Reevaluation of historical data using these scaling laws could result in a more reliable data set on which to base environment models for small debris. These physics-based scaling laws, however, require a thorough understanding of both the materials (impactor and target) and the impactor shape involved in the impact, so they may not be applicable to many experiments.
Active Measurements
Active detectors have been used to detect meteoroid impacts since the early days of space activity. For many years, Salyut space stations
had active impact detectors (Kuzin, 1993), as did Explorers 16, 23, and 46, and the Pegasus series of spacecraft in the 1960s (Mulholland, 1993). There are a wide range of active detectors, from simple impact detectors to complex chemical composition sensors. The simplest and cheapest detectors (and the ones most able to be made into large area detection systems) are acoustic, piezoelectric, pressurized cell, and capacitive discharge impact detectors. These and other simple impact detectors emit a signal when impacted or perforated. There are also many complex detectors (such as plasma detectors, plasma charge separation systems, optical photometers, and chemical and spectrum analyzers) that return a wide range of data regarding the impactor (Atkinson et al., 1993).
Active detectors are able to acquire characterization data that cannot be obtained by passive means. For example, time-dependent measurements of the environment can be made only with active detectors. Such measurements provide the necessary data for monitoring short-term changes in the environment as well as for determining and modeling the dynamics of environmental processes such as formation, distribution, target interactions, and orbital decay. The capabilities of active detectors were made clear by LDEF's Interplanetary Dust Experiment, which used very simple active impact detectors (semiconductor capacitors that discharge on impact) to make time-specific measurements of the debris environment that led to the first detection and monitoring of concentrated clouds of small debris particles (Mulholland et al., 1991). Active sensors would also be required for potential future missions such as the detection of collisions through measurements of the flux of small debris (Potter, 1993).
A wide range of different types of active detectors can be deployed together to maximize the data gathered about each debris impact. Such data include information about the number of impacts per unit time and area; the time of each impact; and the velocity, size, and material composition of the impacting particle. Since on-board collection and transmission of data is possible with active detectors, the return of active detectors to the ground is not necessary; this enables the deployment of active detectors at any altitude. If a return to Earth is planned, however, active detectors can be combined with passive detector techniques.
Active detectors typically cost much more than passive detectors. Complex detection systems incorporating multiple active detector techniques to determine impact velocity and impactor composition, such as those flown on the recent Japanese Hiten and German Brem-Sat spacecraft (Hüdepohl et al., 1992) and those planned for the Cassini spacecraft (Ratcliff et al., 1992), can cost hundreds of thousands to millions of dollars to develop and build. However, for specific missions such as detection and monitoring of orbital debris swarms, simple and relatively inex-
pensive active detector systems can be built and deployed. For example, the Clementine 1 interstage adaptor incorporated capacitive discharge impact detectors similar to those flown on LDEF. Approximately 0.14 square meter of exposed detector area was placed around the circumference of the adapter, which was discarded in a highly elliptical orbit around the Earth. This Orbital Meteoroid and Debris Counter (Kinard, 1993) experiment, which had a total weight of approximately 0.5 kg, operated until the interstage adapter reentered the atmosphere in May 1994. The total design, development, and integration cost of this experiment was $200,000.
Active detectors can have a variety of other limitations, depending on the type of detector. First, complex active detectors are often inherently limited to a few tens of square centimeters of exposed area, can have high masses (in the tens of kilograms), and require large volumes to contain the instruments and associated electronics. In addition, active detectors can suffer from problems with data interpretation and can require many calibration tests. The majority of recent developmental work on active detectors have focused on reducing cost and weight for a given level of performance (e.g., Mulholland, 1993), the development of combined detector systems, and better calibration of currently available detectors (e.g., Kassel and Wortman, 1994).
Extending the Range of In Situ Detectors
In situ detectors have the potential to be used to better characterize the population of medium-sized debris particles. As discussed previously, debris particles a few millimeters in diameter (the lower end of the medium-sized debris range) are very difficult to characterize with even improved ground-based sensors, and remote sensing of such particles in LEO would be a difficult and probably costly effort. The basic problem with detecting these objects via in situ techniques is that (as is discussed in Chapter 3) the flux of medium-sized objects is much lower than the flux of small objects. Medium-sized debris will thus impact a given sensor much less often than will small debris, producing much less data to analyze.
Either very large or very long duration in situ sensors, however, have the potential to provide an effective means of sampling the medium-sized debris population by exposing a large enough surface area over a long enough time for it to be impacted by the relatively sparse flux of these particles. There are difficulties with very long duration missions, however: they would obviously not provide data for some time, and their data would be less valuable because they would represent the average flux over a long period of time. Very large detectors may thus be the
best means to conduct in situ impact sampling of the population of medium-sized debris up to a few millimeters in diameter (while also providing a great deal of data on the small debris population).
Historically, the available exposure area has been limited such that the largest particle diameters detected by in situ detectors to date have been approximately 1 mm (on LDEF; See et al., 1990). However, proposals have been put forward for achieving much larger exposure areas (Kuzin, 1993; Strong and Tuzzolino, 1989). Both of these proposals depend on the use of thin-film active detectors that generate a signal when perforated. The proposal by Strong and Tuzzolino recommended development of a spacecraft with tens to hundreds of square meters of detector area in multiple large deployable arrays (similar to deployable solar power panels). Based on current predictions of the medium-sized and small debris flux, these large detectors should collide with a few particles as large as 1 mm in diameter (as well as numerous particles smaller than 1 mm) annually in LEO (Kuzin, 1993).
The Kuzin proposal recommended the in-orbit modification of the Progress-M cargo spacecraft used by Russia to support its Mir space station operations. The Progress-M would be modified by space station cosmonauts, drawing on Russian experience in extravehicular activities and the construction of large deployable structures. The modifications would provide power modules and a large deployable detector array (similar in design to deployable communication and radar antennas) that could extend several thousands or tens of thousands of square meters of detector area at space station altitudes. A few debris particles 5 to 10 mm in diameter, as well as numerous smaller particles, are expected to collide with (and thus be detected by) such detector areas annually (Kuzin, 1993).
These large-detector concepts are intriguing and technically achievable today, but may be less cost-effective or feasible than other types of space-based sensors previously discussed and yet not provide more meaningful data. The primary disadvantage of these large active array proposals is the cost of the detectors. The feasibility of ensuring a reasonable orbital lifetime for the detectors at low altitudes (given their potentially high area-to-mass ratios) also needs to be studied. Finally, the potential hazard to other spacecraft from these large arrays may be a problem.
STRATEGIES TO MEASURE THE DEBRIS ENVIRONMENT
Figure 2-3 depicts measurements of the LEO debris environment made since 1980. The major gaps that exist in the altitude and size range data are apparent, as is the intermittent nature of most of the data gather
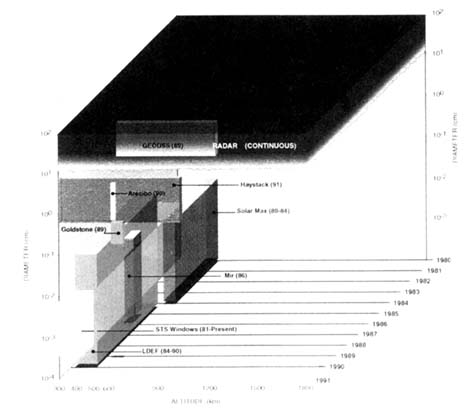
FIGURE 2-3 Orbital debris characterization data—diameter versus altitude versus year. SOURCE: Kaman Sciences Corporation.
ing (There are actually additional gaps in the data that do not appear in the figure, such as the paucity of data on debris—particularly small and medium-sized debris—in low-inclination orbits.) The haphazard nature of the data is a result of the fact that most measurements of the debris environment to date were not part of an overall strategy to understand the environment but rather were gathered whenever measurement opportunities arose.
Further ad hoc experiments to measure the debris environment will add to our knowledge of debris, but cost-effective characterization of the debris environment (including understanding the time- and altitude-variant nature of the debris population, the sources of small debris, and the collision hazard in widely used orbital regions) will require experiments designed specifically to address these questions. However, there is currently no national or international strategy for implementing experiments
to maximize our knowledge of the debris environment. Such a strategy would prioritize the altitude, size, and inclination regimes of highest interest for data collection and would identify the data (such as composition and size, or orbital eccentricity) that are of interest within each regime. This strategy could provide guidance about which detection systems would be most worthwhile to deploy on a given spacecraft and which ground-based sensors could be developed or tasked to observe particular debris size and altitude ranges.
MODELING ORBITAL DEBRIS
Models of the orbital debris population are needed to fill in gaps in the existing measurement data, to interpret new data, and to project the characteristics of the future debris environment. There are two major classes of debris models in use today. Population characterization models take information about the orbital elements and other characteristics of space objects and convert them into measurable parameters such as flux, detection rate for an instrument, or collision velocity. More complex models are used to understand the future growth in the debris population. These model types are not entirely distinct; the output of a model of one type is often used as the input for a model of the other type.
Population Characterization Models
Population characterization models convert data on the orbital elements and other characteristics of space objects into measurable parameters, such as flux, detection rate for an instrument, or collision probability. This conversion is necessary both to help researchers interpret data collected in experiments that sample the uncataloged orbital debris environment and to aid designers in determining the debris hazard to their spacecraft.
Different types of population characterization models have different degrees of uncertainty. Determining the probability that an object in a certain orbit will pass through a particular area of space, for example, requires few assumptions (Kessler, 1981a). Consequently, the average rate at which a given set of objects in known or assumed orbits will pass through a sensor's field of view or impact another object can be calculated with an accuracy of a few percent. However, attempts to determine other characteristics, such as size or albedo, of objects detected by a sensor will usually have a greater uncertainty, due to the variables that contribute to the sensor's signal return.
The application of additional population characterization models, however, can reduce these uncertainties. For example, the diameter of an
impact crater on a spacecraft surface is related not only to the impacting object's mass but also to its velocity (speed and direction), which is related to the object's orbital characteristics. Population characterization models can thus be employed to predict a probability distribution of velocities from an assumed orbit distribution, which can then be used to create a probability distribution of particle masses. The impacting object's mass can then be estimated from this probability distribution. A similar method can be used to estimate the size of space objects detected by a telescope. For a telescope, the brightness of an observed object is a function of the object's size, optical properties, and orientation as it passes through the telescope's field of view. In this case, population characterization models can use expected distributions of optical properties and orientations to convert the measured distributions of brightnesses into a distribution of probable sizes.
NASA's "Engineering Orbital Debris Model" (Kessler et al., 1991), and the ESA engineering model (Sdunnus and Klinkrad, 1993) are examples of a particular type of population characterization model used by spacecraft design engineers. These models predict the flux of orbital debris that might strike a spacecraft during its lifetime as a function of debris size and velocity for various spacecraft orbital altitudes and inclinations. Although such models are based primarily on measurements of the orbital debris environment, they use the results of more complex models to extrapolate these measurements.
This type of model also serves as a "reference model" and is used to compare measurements and evaluate relative hazards. There are currently no recognized standard population characterization reference models; researchers and designers must rely on models that have not undergone peer review or that may not contain the latest data. This can potentially lead experimenters to interpret their data improperly or spacecraft designers to improperly assess the hazard to their spacecraft.
Models of the Future Debris Population
The earliest models used to predict the future orbital debris environment (Kessler and Cour-Palais, 1978; Kessler, 1981b; Su and Kessler, 1985) built on the population characterization models and combined breakup models with atmospheric drag models to predict the environment in the 1980s and beyond. These relatively simple models predicted an environment in the 1990s that is not greatly different from that being measured today. Currently, more complex models are used to predict the growth in the orbital debris population. Such models combine a traffic model, a breakup model, and an orbit propagation model to predict possible future orbital debris population states. Two such models in common use
today are NASA's EVOLVE (Reynolds, 1993) and the University of Braunschweig's CHAIn (Rex and Eichler, 1993). These models take estimates of the current space object population, and new debris from various sources (e.g., collisions, explosions, mission-related debris), and propagate the orbits of these objects over time to create a static description of the debris population at a selected time in the future. (The predictions these models make about the future debris environment are discussed at length in Chapter 8.)
Each of the component models that goes into such models as EVOLVE and CHAIN has its own characteristics and uncertainties. A traffic model keeps track of spacecraft, rocket bodies, and any associated debris launched into orbit by recording when these objects are placed in orbit, their sizes and masses, and their initial orbital elements. Some of these objects will break up into smaller fragments or degrade and release smaller debris. A breakup model describes the number of fragments generated in a breakup, as well as the changes in velocity that place them into slightly different orbits. An orbit propagation model then determines how the orbits of both intact space objects and space object fragments change as a function of time.
Traffic Modeling
The growth and evolution of the Earth-orbiting space object population will be influenced in large measure by the frequency and character of future space operations. Space traffic models, coupled with propagation and breakup models, predict the magnitude and nature of these operations and their effect on the LEO and HEO space object populations. Traffic models must account for (1) all objects (e.g., spacecraft, rocket bodies, mission-related debris) to be placed into Earth orbit; (2) the apogee, perigee, and inclination of each object's orbit; (3) the size and mass of each object, (4) any planned reorbiting or deorbiting maneuvers at the end of an object's functional lifetime; and (5) any stored energy left in the rocket body or spacecraft that may cause it to explode.
Ideally, space traffic models should look far enough into the future to assess the impact of actions to curb the growth of the total space object population. Predicting even the overall level of space activities over such a time frame, however, is often futile, since very few national or commercial space programs have credible long-range plans extending for more than 8 to 10 years, and even these plans are affected by programmatic, technical, and economic trends; changing national and market requirements; and advances in technology. As a further complication of the problem, it is important to know the population in each orbital region, so that low traffic estimates in one altitude region of the model do not offset
unanticipated missions in another altitude region. For all of these reasons, space traffic models have historically been poor predictors of future activities. Nevertheless, scenarios of potential levels of future activity can be developed and used to evaluate the influence of future launch activity on population.
Breakup Models
Breakup models are used to characterize the fragments generated in space object breakups. The results of these models are typically used to estimate existing debris populations and to predict the future population. Most breakup models use the type and amount of energy causing the breakup of a space object of a given mass to estimate the resulting fragment distribution. The most useful breakup models are semiempirical and incorporate the laws of physics as well as existing data on breakups in their calculations. However, there are two major difficulties involved in developing an accurate breakup model. First, no ''typical" amount of debris is generated in an explosion or collision, since there are many different causes of explosions and many different types of collisions (e.g., two spacecraft colliding head-on will produce more debris than a collision between a 10-cm fragment and a spacecraft's solar array). Second, and perhaps more problematically, there are very few data on which to base breakup models.
Few experiments have been conducted to improve breakup models; most available data have been obtained as a byproduct of experiments with other objectives. Explosion data have been gathered from such sources as an accidental Atlas missile explosion, munition explosion tests (Bess, 1975), and explosions in orbit, although recently, some groundbased explosion tests have been conducted specifically to determine the velocity and mass distributions of explosion fragments (Fucke, 1993). Data on collisions are also limited; for many years, the primary sources of such data were the pioneering work of Bess at the NASA Langley Research Center in 1975 and several series of tests performed for the U.S. military during the late 1970s and early 1980s. Debris from the military tests were examined for NASA in the 1980s explicitly to refine the foundation of satellite impact breakup models. The deliberate on-orbit collisions of P-78 and D-180 in the mid 1980s added to this database, though no significant data are available on the smaller (untrackable) fragments produced in these tests.
Recently, however, more complete data on the fragments created in a collision-induced breakup were acquired from tests specifically designed to improve breakup models. In these tests, the U.S. Defense Nuclear Agency shot a 150-gram projectile at 6 km/s into parts of an actual space
|
BOX 2-6 Modeling Debris Clouds One specialized type of breakup model focuses on the dynamics of the debris clouds formed following a collision or explosion in orbit (Chobotov, 1990). Although these models do not contribute significantly either to estimates of the current population or to the understanding of the long-term debris population, they can be useful in predicting the short-term hazard to spacecraft in orbits near where a breakup occurred. Such information is particularly useful for designers of spacecraft constellations, who are interested in ensuring that the breakup of one spacecraft will not overly endanger other spacecraft in the constellation. |
craft and into a full-scale spacecraft model (Hogg et al., 1993). Unfortunately, analysis of the data from these tests was not completed due to a lack of funding. Consequently they have not resulted in any significant improvements in most breakup models, although the tests did demonstrate that breakup models that predicted few small fragments were incorrect. NASA has recently contracted with Kaman Sciences Corporation to complete the analysis of these tests.
These data, particularly the data from the in-orbit breakups, shed light mostly on the characteristics of the larger debris produced. Only the largest fragments of a breakup in orbit can be tracked, although fairly accurate velocity and area-to-mass ratios can be determined for these fragments. Even in ground tests, often only the larger fragments are recovered, since a great amount of work is required to recover the smaller pieces. As a result, the amount and the velocities of smaller debris produced in breakups are not well known.
Propagation Models
Orbit propagation models predict how the orbits of space objects change as a function of time. This information is used for two major purposes: determining the location of particular space objects in the relatively near term (typically over a period of a few days or less for purposes of collision avoidance or reentry predictions) and making long-term (typically over a period of years) predictions about the debris environment. The short- and long-term propagation tasks have some common characteristics, but each also faces unique challenges.
Both short- and long-term propagation models must take into account the various forces acting on space objects in Earth orbit. As described in Chapter 1, these include atmospheric drag, solar radiation pressure, gravitational perturbations by the Sun and Moon, and irregularities
in the gravitational field of the Earth. Fortunately, few objects in Earth orbit are affected significantly by many of these forces; the particular forces relevant to each object depend on the object's orbit and area-to-mass ratio. Since accurate orbit propagation models that include all forces acting on an orbiting object can be very computation intensive, most models take into account only the forces that most strongly affect the space objects in a particular orbital region. (For example, in LEO, where orbital inclination does not change significantly with time, the long-term propagation task is reduced to determining the changes in orbital perigee and apogee due to atmospheric drag.)
Accurate short-term deterministic propagation models require that the forces on an object be known and predictable. The inherent unpredictability in atmospheric drag (discussed in Chapter 1) thus introduces error into the predictions of short-term deterministic propagation models for objects in low LEO orbits (less than about 500 km). Accurate deterministic predictions in this region for tasks such as collision warning, which require a high degree of accuracy and propagation of at least a significant fraction of a day, can be achieved only by making repeated observations with increasing calculation fidelity as the time to impact decreases. The Russian SSS uses such an approach to solve actual tasks in debris-related contingencies (e.g., space objects about to reenter). Its approach employs short-term density prediction models utilizing (in addition to knowledge of solar and geomagnetic activity) data on the current drag experienced by other space objects to specify atmospheric density.
Uncertainty in the day-to-day atmospheric drag is not such a problem for long-term propagation modeling in LEO, both because much of the uncertainty can be averaged over time and because long-term models are not as concerned with objects in the orbits most affected by atmospheric drag (which tend to reenter the atmosphere fairly rapidly). The long-term uncertainty in atmospheric drag, however, still limits the fidelity of long-term propagation models in LEO. If solar and geomagnetic activity are known, long-term atmospheric density models are accurate to within about 20%. However, atmospheric density can vary by more than a factor of 10 over the 11-year solar cycle, and the level of future solar cycles is unpredictable. Consequently, only very simple LEO propagation models are normally justified for long-term space object population studies.
Although atmospheric drag ceases to be a factor above LEO, space objects at higher altitudes are influenced by solar radiation pressure, lunar and solar perturbations, and irregularities in the Earth's gravity. These can affect an orbit's inclination and eccentricity as well as its apogee and perigee altitude, so more complex propagation models are re-
quired to obtain predictive accuracy. Although such models exist and are capable of providing sufficient accuracy for long-term modeling, they require a very large amount of computation. New hardware, however, is making the calculation-intensive computations much more feasible. It is not yet clear what approximations could be made to enable the creation of accurate long-term HEO propagation models that do not require a large computational capability.
Short-term propagation modeling (for purposes of collision avoidance, etc.) at high altitudes is difficult because of the problems inherent in tracking objects at such distances. One problem is that only very large objects at those distances from the Earth can be detected by current space surveillance sensors. Another is the fairly large uncertainty in the exact position of detected objects. Although short-term predictions have been made for GEO since the 1970s, and avoidance maneuvers have even been carried out based on this information, the uncertainty in the exact position of GEO objects means that the number of false alarms was probably high.
FINDINGS
Finding 1: The U.S. and Russian space surveillance networks are able to detect objects down to a size of about 10 cm in LEO. Increasing fractions of larger objects are tracked so that the LEO debris environment in the size range greater than 20 cm is adequately characterized by the catalogs. However, both catalogs underrepresent objects in highly elliptical orbits, low-inclination orbits, and high-altitude circular orbits. As the orbital altitude increases, the minimum size of objects cataloged grows, until at GEO not even all objects with a diameter greater than 1 meter are tracked.
Finding 2: A number of approaches could be used to improve on current space object catalogs. Sharing catalog data between nations would improve our understanding of the magnitude and distribution of the population of large space objects. A network of new short-wavelength radars would be required to catalog LEO debris significantly smaller than that currently being tracked. Catalogs of large objects in regions above LEO, where data are particularly sparse, could be improved with increased use of large-aperture or CCD-equipped optical sensors. Further analysis is needed to determine whether sharing data from national space object catalogs would result in an improved combined catalog.
Finding 3: In situ direct sampling techniques can detect particle sizes up to about 1 mm in LEO, but the population of medium-sized debris is sufficiently sparse that very large collection areas would be required to
obtain a statistically meaningful sample. Ground-based remote sampling has been, and will remain for some time, the most effective means of measuring debris in the medium size ranges.
Finding 4: There has been no systematic approach to sampling space for orbital debris; most sampling to date has been performed when the opportunity arose, resulting in a series of investigations that studied a limited region of space over a limited amount of time. There is a need for national or international strategies to help prioritize detector development, deployment, data collection, and analysis of historical and new data. Such strategies are necessary to gain a better understanding of the sources of small and medium debris and the variations in these populations with respect to altitude, inclination, and time.
Finding 5: Population characterization models can be used by spacecraft designers to estimate the debris hazard to their spacecraft. Debris researchers can use them to integrate available data and to provide a framework for predicting the results of future measurements. As new data become available, existing models should be revised to produce a comprehensive, standard, peer-reviewed reference model.
Finding 6: Models predicting the future space object population in Earth orbit draw on traffic, breakup, and orbit propagation models. These component models have large inherent uncertainties; as a result, many characteristics of the future debris population cannot be predicted with precision. Experience to date with such models has, however, been fairly positive; relatively simple models from the late 1970s and early 1980s predicted an environment in the 1990s that is not greatly different from that being measured today.
REFRENCES
Atkinson, D.R., J.D. Mulholland, A.J. Watts, S.L. Lapin, and J.D. Wagner. 1993. Meteoroid and Debris Monitoring: An Industry Summary. Contract Final Report. Contract Number 959626. Pasadena, California: NASA Jet Propulsion Laboratory.
Batyr, G., S. Veniaminov, V. Dicky, V. Yurasov, A. Menshicov, and Z. Khutorovsky. 1993. The current state of the Russian Space Surveillance System and its capability in surveying space debris. Pp. 43-47 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Batyr, G., S. Veniaminov, V. Dicky, S. Kravchenco, and V. Yurasov. 1994. Some Preliminary Results of ODERACS Experiment. Paper presented at U.S./Russia Orbit Determination and Prediction Workshop, Washington, D.C.
Bendisch, J., J.P. Hoffmann, R. Liebscher, and F. Rollenhagen. 1993. Detection of space debris by the use of space-based optical sensors. Pp. 91–97 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Bess, T. D. 1975. Mass Distribution of Orbiting Man-Made Space Debris. NASA TN D-8108. Washington, D.C.: National Aeronautics and Space Administration.
Chobotov, V. 1990. Dynamics of orbital debris clouds and the resulting collision hazard to spacecraft. Journal of the British Interplanetary Society 43:187–195 .
Clark, J., and E. Pearce. 1993. Briefing presented for the National Aeronautics and Space Administration/Department of Defense Orbital Debris Workshop, Colorado Springs, Colorado, September 1–3.
de Jonge, A.R.W., 1993. IR detection of space debris. Briefing presented to the National Research Council Committee on Space Debris Workshop, Irvine, California, November 18.
Fucke, W. 1993. Fragmentation experiments for the evaluation of the small size debris population. Pp. 275–280 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Goldstein, R., and L. Randolph. 1990. Rings of Earth Detected by Orbital Debris Radar. JPL Progress Report 42–101, May 15. Pasadena, California: NASA Jet Propulsion Laboratory.
Henize, H., and J. Stanley. 1990. Optical observations of orbital debris. AIAA-90-1340. AIAA/NASA/DoD Orbital Debris Conference, Baltimore, Maryland, April 16–19. Washington D.C.: American Institute of Aeronautics and Astronautics.
Hogg, D.M., T.M. Cunningham, and W.M. Isbell. 1993. Final Report on the SOCIT Series of Hypervelocity Impact Tests. Wright Laboratory-TR-93-7025. Dayton, Ohio: Wright Laboratory.
Hüdepohl, A., H. Iglseder, and E. Grün. 1992. Analysis of the Results of Two-Year Operations of the Munich Dust Counter—A Cosmic Dust Experiment on Board the Satellite HITEN. International Astronautical Federation paper 92-0561. Paris: International Astronautical Federation.
Kassel, P.C., and J.J. Wortman. 1994. Metal-oxide-silicon capacitor detectors for measuring micrometeoroid and space debris flux. Paper submitted to the AIAA Journal of Spacecraft and Rockets.
Kessler, D.J. 1981a. Derivation of the collision probability between orbiting objects: The lifetime of Jupiter's outer moons. Icarus 48:39–48 .
Kessler, D.J. 1981b. Sources of orbital debris and the projected environment for future spacecraft. Journal of Spacecraft and Rockets 18(4):357–360 .
Kessler, D.J. 1993. Orbital debris environment. Pp. 251–262 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Kessler, D.J., and B.G. Cour-Palais. 1978. Collision frequency of artificial satellite: The creation of a debris belt. Journal of Geophysical Research 83(A6):2637–2646 .
Kessler, D.J., R.C. Reynolds, and P.D. Anz-Meador. 1991. Space Station Program Natural Environment Definition for Design. NASA SSP 30425, Revision A. Houston, Texas: NASA Johnson Space Center.
Kinard, W.H. 1993. Description of the orbital meteoroid and debris counting experiment to fly on the CLEMENTINE inter-stage adapter spacecraft. P. 148 in NASA Conference Publication 10120, Third LDEF Post-Retrieval Symposium Abstracts. Hampton, Virginia: NASA Langley Research Center.
Kuzin, G.A. 1993. Meteorite and Man-Made Microparticle Impact Detection Methodology and Equipment on the Space Stations "SALYUT" and "MIR." Briefing presented to the National Research Council Committee on Space Debris Workshop, Irvine, California, November 18.
McDonnell, J.A.M., and K. Sullivan. 1992. Hypervelocity impacts on space detectors: Decoding the projectile parameters. Hypervelocity Impacts in Space, 39. Canterbury, United Kingdom: University of Kent at Canterbury Unit for Space Sciences.
Mehrholz, D. 1993. Potentials and limits of space object observations and data analysis
using radar techniques. Pp. 59–64 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Mulholland, J.D.1993. Synoptic monitoring of orbital debris (SYNMOD): A progress report on current and future applications. P. 149 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Mulholland, J.D., S.F. Singer, J.P. Oliver, J.L. Weinberg, W.J. Cooke, N.L. Montague, J.J. Wortman, P.C. Kassel, and W.H. Kinard. 1991. IDE Spatio-Temporal Impact Fluxes and High Time-Resolution Studies of Multi-Impact Events and Long-Lived Debris Clouds. NASA CR-3134. NASA Conference Publication 3134, LDEF-69 Months in Space: Proceedings of the First Post-Retrieval Symposium, Kissimmee, Florida, June 2–8. A.S. Levine, ed. Hampton, Virginia: NASA Langley Research Center.
NASA (National Aeronautics and Space Administration). 1970. Meteoroid Damage Assessment. NASA Space Vehicle Design Criteria. NASA SP-8042. Washington, D.C.: NASA.
NASA (National Aeronautics and Space Administration). 1990. Report of the Subcommittee on Micrometeor and Debris Protection, Space Station Advisory Council. Washington, D.C.: NASA.
Neste, S., K. Tomiyasu, H. Halsey, R. Grenda, and R. Soberman. 1982. Feasibility Study for Space Debris Detection Concepts Final Report, Contract No. NAS9-16459. Philadelphia, Pennsylvania: General Electric Company Space Systems Division.
Pearce, E.C., M.S. Blythe, D.M. Gibson, and P.J. Trujillo. In press. Space debris measurements: Phase one final report. Proceedings of the 1994 Space Surveillance Workshop.
Portree, D.S., and J.P. Loftus, Jr.1993. Orbital Debris and New-Earth Environment Management: A Chronology. NASA Reference Publication 1320, December. Linthicum Heights, Maryland: NASA Center for Aerospace Information.
Potter, A.E. 1993. Early detection of collisional cascading. Pp. 281–285 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Ratcliff, P.R., J.A.M. McDonnell, J.G. Firth, and E. Grün. 1992. The cosmic dust analyzer. Journal of the British Interplanetary Society 45(9):375 .
Rex, D., and P. Eichler. 1993. The possible long term overcrowding of LEO and the necessity and effectiveness of debris mitigation measures. Pp. 604–615 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Reynolds, R.C. 1993. Orbital debris environment projections for space station. Pp. 337–339 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Sato, T., K. Tanaka, K.I. Ikeda, T. Wakayama, and I. Kimura. 1992. Interpretation of space debris RCS variations observed by the MU radar. Paper presented at the 18th International Symposium on Space Technology and Space Science (18th ISTS), Kagoshima, Japan, May 17–23. Tokyo: ISTS.
Sdunnus, H., and H. Klinkrad. 1993. An Introduction to the ESA Reference Model for Space Debris and Meteoroids. Pp. 343–348 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
See, T., M. Allbrooks, D. Atkinson, C. Simon, and M. Zolensky. 1990. Meteoroid and Debris Impact Features Documented on the Long Duration Exposure Facility: A Preliminary Report. NASA JSC #24608. Houston, Texas: NASA Johnson Space Center.
Stansbery, E.G., D.J. Kessler, T.E. Tracy, M.J. Matney, and J.F. Stanley. 1994. Haystack Radar Measurements of the Orbital Debris Environment. JSC-26655 May 20. Houston, Texas: NASA Johnson Space Center.
Strong, I., and A.J. Tuzzolino. 1989. The Space Dust Experimental Spacecraft. Air Force Laboratory Contract Task Report. Contract F29601-87-C-0207, Subtask 03-11. Paper presented to the First Annual Workshop on the Effects of Orbital Debris, Kirtland Air Force Base, New Mexico, March 15–16.
Su, S.Y., and D.J. Kessler. 1985. Contribution of explosion and future collision fragments to the orbital debris environment. Advances in Space Research 5(2):25–34 .
Thompson, T.W., R.M. Goldstein, D.B. Campbell, E.G. Stansbery, and A.E. Potter. 1992. Radar detection of centimeter-sized orbital debris: Preliminary Arecibo observations at 12.5-cm wavelength. Geophysical Research Letters 19(3):257 .
Utkin, V.F., V.I. Lukyashenko, V.N. Dolgih, V.A. Emelyanov, M.V. Yakovlev, and A.B. Krasnov. 1993. The state of the art in research of technogenic space debris in Russia: Proposals for international cooperation. Pp. 15–18 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Watts, A., D. Atkinson, and S. Rieco. 1993. Dimensional Scaling for Impact Cratering and Perforation. NASA NCR-188259 March 16. Houston, Texas: NASA Johnson Space Center.
































