
3
Future Directions
The previous chapter provides a framework for the scientific advances that are now possible with precisely-positioned aircraft. This chapter describes the technical foundation that must be developed if these goals are to be achieved. With the advent of new technologies for measurement, positioning, and outfitting airborne platforms, aircraft may well become the geophysical research vessels of the next decade.
Measurement and Positioning Technology
Airborne Measurements of the Earth's Gravity Field
Airborne Gravity. With the kinematic positioning and navigation capabilities of GPS, airborne gravimetry is a viable tool for mapping the regional gravity of long-and medium-wavelength features. The resolution of this technique depends in part on the speed of the aircraft. The accuracy depends on the vibration environment and the stability of the platform. A high-speed, long-range aircraft such as the Lockheed P-3 Orion yields accuracies of 2.5 to 4.0 mGal and wavelengths of 10 to 20 km, whereas a medium-speed, fixed-wing aircraft such as a Twin Otter yields accuracies of 1.0 to 2.5 mGal and minimum recoverable wavelengths of 5 to 8 km. Short-wavelength targets can be met by using helicopters surveying at speeds of 10 to 50 knots. This approach is capable of recovering accura-
cies of 1 mGal and wavelengths of 1 to 2 km but is expensive for routine use.
With conventional aircraft it is difficult to measure airborne gravity to accuracies of better than 1 mGal at wavelengths less than 1 km. This limitation on resolution represents a fundamental barrier to the wider application of airborne gravity by the petroleum, minerals, and hazardous waste industries, as well as by the scientific community. The primary limiting factors on airborne gravity resolution and accuracy are the sensor design, the stabilized platform, and the positioning. Most gravity sensors are based on technology developed 20 to 40 years ago. The widely used Lacoste-Romberg zero-length spring was developed in 1943 and is still considered the industry standard for marine gravity surveys. The sensor has been widely extended to airborne application because of its reliability, but its asymmetric design makes it susceptible to contamination by aircraft motion. The second most widely used sensor, the Bell Aerospace accelerometer, has a linear design and has been primarily used for military applications. Despite the elegance of the design, the sensor is extremely temperature-sensitive and is not presently capable of providing the response necessary to improve airborne gravity measurements to the sub-mGal, sub-kilometer level. There is clearly a need to integrate a new generation of gravity sensors into the current systems.
The stabilized platform commonly introduces errors in airborne gravity measurements. The platform is designed to ensure that the sensor is aligned orthogonal to the geoid so that it measures the vertical component of gravity. If this orientation is not maintained, the measured signal will include a poorly constrained fraction of the aircraft's horizontal acceleration. As with the sensors that are widely used today, stabilization technology was originally designed for marine investigations; this technology was adapted for airborne applications nearly 40 years ago. Subsequent modification of platform technologies has yielded both longer periods and digital control, which have enhanced data recovery during turns and periods of turbulence. Nevertheless, the stabilization system continues to be a major source of error and needs to be improved to take full advantage of airborne techniques.
The principal difficulty in recovering high-accuracy gravity data at medium and long wavelengths is the reduction of differential GPS data. This process requires a major investment of analysts' time following a mission to ensure that precise positions are retrieved. A very accurate
knowledge of the altitude of the survey aircraft is required for two reasons. The first concerns matching the height of the measurement to a common datum, where the error of a mismatch in height is about 0.3 mGal/m. The second is more problematic, being the requirement to calculate and remove the vertical acceleration of the aircraft. Vertical positions suitably smoothed can be time-differentiated twice to obtain vertical accelerations. In addition, horizontal velocity of an aircraft must be known to about 10 cm/s or better over the smoothing interval to compute the eötvös corrections with an accuracy of less than a mGal.
Although technological advances will improve the accuracy and resolution of airborne gravity measurements, the costs must also be reduced to enable researchers to utilize this technique fully. Costs could be reduced by (1) integrating instruments and their support equipment to achieve smaller size, less weight, and lower power consumption (thus requiring smaller, less costly aircraft), (2) optimizing the productivity-to-effort ratio by fine-tuning the techniques for data processing and survey geometry analysis, and (3) streamlining the operational logistics and supporting infrastructure to increase efficiency. These measures alone would sustain airborne gravimetry as a valuable tool for earth science studies.
New Directions In Recovering The Earth's Gravity Field. Traditional ground, ship, and aircraft techniques measure the vertical component of the Earth's gravity field. New techniques, such as vector gravimetry (Schwarz et al., 1992) and gravity gradiometry (Jekeli, 1988) offer the opportunity for extracting additional information about the Earth's structure. Vector gravimetry yields the amplitude and direction of the gravity vector, whereas gravity gradiometry yields the various gradients of gravity.
Vector gravimetry is based on a triad of mutually orthogonal accelerometers that provide sensed accelerations in all three directions. That is, the gravimeter and stabilized platform are replaced by an inertial navigation system. This idea is not new. It was demonstrated for land systems in the 1970s and 1980s. It was also considered as a useful by-product, though never fully demonstrated, of the Aerial Profiling Terrain System (APTS) developed by Charles Stark Draper Laboratory in the mid-1980s. At the same time, Northrop Corporation conducted some flight tests with a stellar-inertial platform to measure deflections of the vertical (horizontal gravity components) at altitude. The principal difficulty with vector
gravimetry (where the horizontal components are of primary interest) is the orientation requirement of the platform. Since the vertical component of gravity couples with the sine of the error in leveling into the horizontal component, every arcsecond of leveling error corresponds to 5 mGal of horizontal gravity error. Therefore, the natural drift of the gyros that orient the platform requires special attention; for example, Northrop used a star tracker to limit the gyro error growth. Studies indicate, however, that approximate high-pass filters may alleviate this problem without the expense of additional attitude sensors.
In an effort to circumvent the problems of separating the gravitational signal from the total acceleration environment of a moving platform, the Defense Mapping Agency (DMA) in the 1970s and 1980s undertook a unique program for airborne gravity gradiometry for regional applications. Unlike a gravimeter, an ideal gradiometer is not affected by the linear kinematic accelerations of the moving platform on which it is mounted. Instead, the gradiometer senses the curvature of the gravitational potential field. Thus, it is also more sensitive than the gravimeter is to the local density structure. An example of this technique is demonstrated in a model of a buried meandering stream (Figure 3.1). The positioning requirements for gradiometers are only about 100 m in any direction (horizontal and vertical) for the relative accuracy goal of about 1 mGal over 10 km. Initial field tests conducted in the Texas-Oklahoma area in 1987 demonstrated that DMA's Gravity Gradiometer Survey System (flown on a C-130 transport) could conduct gravity surveys in an airborne mode with a recovery accuracy of a few milligals at a resolution under 10 km in each of the three components of the gravity vector. Unfortunately, many of the data from this first test were compromised by problems with the GPS navigation and excessive platform vibrations as well as by intermittent degradation of the gradiometer instruments and/or environmental controls. The program was terminated because of its high cost but the concepts were demonstrated successfully (Jekeli, 1993).
Currently, several gravity gradiometry sensors are being developed for airborne applications. Some efforts have evolved from planned satellite gradiometer missions, including the proposed Aristoteles mission of the National Aeronautics and Space Administration (NASA) and the European Space Agency (ESA), and NASA's proposed Satellite Gravity Gradiometer Mission (University of Maryland gradiometer). Other development efforts
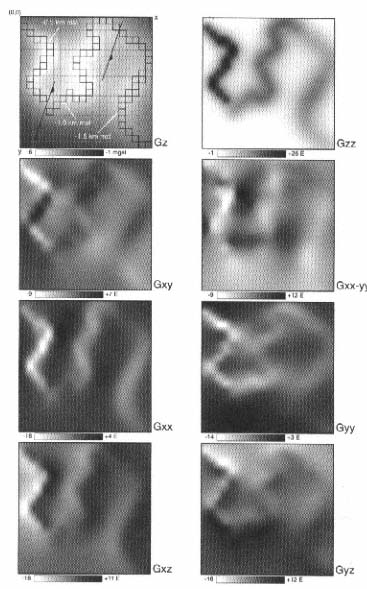
Figure 3.1
Model gravity data for a buried meandering stream at 0.5-km, 1.0-km, and 1.5-km burial depths. Images are 16 km across with a sampling density of 126 m. Gradient scales are in eötvös. The computed gradients (e.g., Gzz is the vertical gradient of the vertical component of the gravity vector) show greater detail than the normal gravity. (Figure from Bodard et al., 1993).
have principally been the result of the mineral industry's interest in recovering a very high resolution gravity gradient. None of these developmental systems have been subjected to the operational environment of an aircraft.
Long-term goals in airborne gravity gradiometry are to reduce the instrument size, provide adequate platform stabilization, and provide support equipment for airborne experimentation and eventual operation. Despite the technological difficulties, gravity gradiometry provides a powerful way to resolve the fine structure of the gravity field, and it should therefore be encouraged and developed as a future tool for problems in geophysical interpretation. Concurrently, airborne scalar gravimetry must be enhanced and vector gravimetry tested as the only near-term (10 to 20 years) technologies for resolving the gravity field between 10 km and several hundred kilometers.
Airborne Surface Topography Measurements
Existing Mapping Capabilities. The oceanographic community has long measured the topography of the ocean floor through remote techniques that evolved from casting weighted lines over the sides of ships, to acoustically mapping a single trace beneath a research vessel, to using the highly refined swath mapping systems. Swath systems, which recover a detailed image of the ocean floor topography in strips up to 10 km wide, are now standard equipment on state-of-the-art research vessels. The technology to map the surface of continents is undergoing similar evolution, although the development lags behind that achieved by the ocean science community. For example, current airborne topographic mapping techniques consist of rigidly mounted laser and radar ranging systems integrated with precise attitude and positioning recovery. These systems recover accuracies of about 20 cm (e.g., Garvin, 1993), which are similar to accuracies provided by early ship profiling technologies.
Swath mapping capabilities are beginning to be integrated into interferometric and stereographic techniques and into developing systems that sweep a path orthogonal to the aircraft flight path. Examples of swath systems include a laser ranging system that samples a 250-to 400-m-wide swath, and an interferometric synthetic aperture radar (SAR) system that produces swath images of topography 6 to 15 km wide with accuracies of
2 to 5 m. Photographs taken from a precisely-positioned aircraft produce an image whose accuracy and size is proportional to the aircraft altitude and the camera's focal length and film size. Examples of these four techniques are shown in Figures 3.2(a) through 3.2(d) and are described below. Table 3.1 summarizes the present range of airborne mapping techniques.
Airborne mapping techniques have several well-documented sources of error, including the following: (1) aircraft positioning; (2) vegetation, which affects most remote techniques; (3) weather conditions, which prevent the laser-ranging-based systems and the photogrammetric approach from imaging the ground surface; (4) steep surface slopes or rough terrain, which affect ranging systems; and (5) moisture content in the near surface, which affects interferometric SAR systems.
The single-ranging systems that recover topography have long been used to recover vertical positions for airborne gravity surveys over regions covered by water or sea ice. The ranges to the surface can be collected with either a radar system or a laser system. The laser systems are able to sample at a very high rate with a small footprint (▯ 1 m), but they are generally unable to penetrate cloud cover or the vegetation canopy. Recently, however, a laser altimeter with a large diameter footprint (6 to 30 m) developed at NASA's Goddard Space Flight Center has successfully imaged both the tops of the trees and the underlying ground terrain, even in densely vegetated areas (e.g., Harding et al., 1994). Radar systems have larger footprints and sample at a slower rate than laser systems, but they are generally less hindered by local weather conditions such as cloud cover. Radar ranging systems are used by commercial military and university research groups to integrate topography, gravity, and other geophysical measurements.
Simple laser ranging systems have recently been modified to sweep a path orthogonal to the aircraft motion. Such systems have been constructed and tested by NASA and commercial vendors and are capable of imaging 250-to 400-m-wide swaths with a conical scan process. The results are comparable with those of the ERS-1 satellite mission over Greenland (Thomas et al., 1992). Laser ranging systems, however, are limited by steep slopes, rough terrain, and adverse weather conditions.
Figure 3.2(a)
Comparison of NASA scanning laser altimeter data from the Airborne Oceanographic Lidar (AOL) sensor with independent laser altimeter profile data from the ATLAS sensor for the surging terminus of the Skeidararjokull outlet glacier in southern Iceland. Both data sets were acquired on September 23, 1991, as part of a NASA/U.S. Geological Survey cooperative study of landforms in Iceland. (Figure courtesy of J. Garvin, NASA/Goddard Space Flight Center and R. Williams, U.S. Geological Survey).
Figure 3.2(b)
Precise surface altimetry. Top: Raw laser ranges with altitude and attitude corrections for a portion of a CASERTZ profile with an aircraft speed of about 75 m/s. The aircraft elevation is based on the differential carrier phase GPS solution and the aircraft attitude corrections are derived from the inertial navigation system. (Figure from Childers et al., 1992). Bottom: Example of repeat surface altimetry along a 16-km line. These two lines, separated horizontally by approximately 70 m, have a mean difference of 0.24 m and a standard deviation of 0.32 m. (Figure from Blankenship et al., 1992).
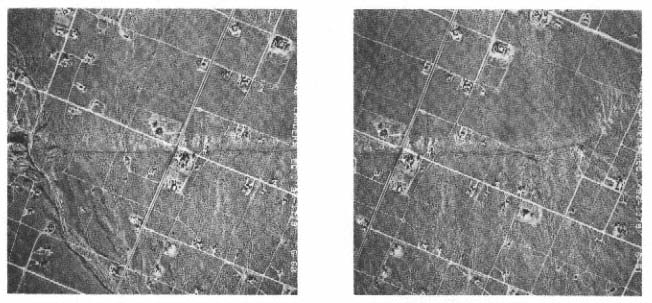
FIigure 3.2(c)
Photogrammetric images of Landers, California, taken immediately after the June 28, 1992, earthquake. The photos are stereo images of the surface rupture (horizontal line). Through the photogrammetric process, horizontal accuracies of 1:20,000 and vertical accuracies of 1:10,000 of the flight altitude are routinely obtained. (Figure from I.K. Curtis Services of Burbank. Courtesy of B. Young, Riverside County Flood Control District).
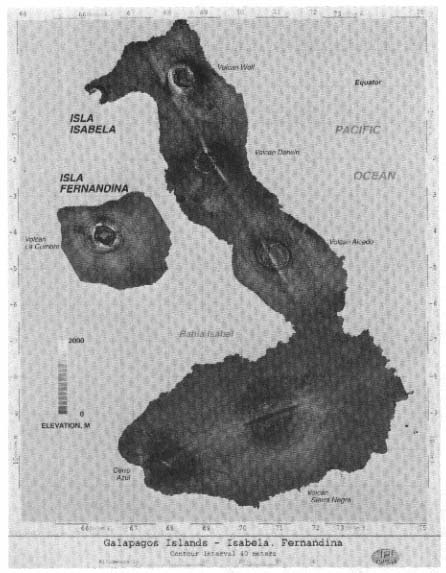
Figure 3.2(d)
Image made from data collected for Isla Fernandina and Isla Isabela in the Galapagos archipelago using the JPL/NASA TOPSAR instruments. Over 50 40 × 12 km images were mosaicked together to obtain this DEM. Relative height accuracy is 2 to 5 m and absolute height accuracy is estimated to be 10 m. (Figure courtesy of S. Hensley, Jet Propulsion Laboratory).
TABLE 3.1 Topography Measuring Systems (Compiled from input at 1993 Workshop on Airborne Geophysics).
|
Systems |
Swath Width |
Horizontal Resolution |
Vertical Resolution |
Limitations |
Requirements Positioning & Attitude |
|
Profiling Laser |
n/a |
1–5 m |
20 cm |
cloud cover canopy top |
0.1 m/0.2 mrad |
|
Scanning Laser |
400 m |
4 m |
0.1–1 m |
cloud cover |
0.1–1 m/<2 mrad |
|
SAR Interferometry |
5–15 km |
10 m |
1–3 m |
all weather canopy top (single pass) |
1 m/0.2 mrad |
|
partial penetration (multiple pass) |
2 cm/1 mrad |
||||
|
Photogrammetry |
scale dependent 1.5 × altitude |
variable |
0.25 mm × mapping scale |
cloud cover canopy top |
0.1–1 m/0. 1 mrad |
Synthetic aperture radar is a relatively new technique that allows topographic mapping to be performed in sparsely vegetated regions with a swath width of 6.4 km and an accuracy of 2 to 5 m. The prototype system is currently mounted aboard a NASA DC-8, and was developed as part of a planned low-Earth orbiting topographic mapping mission. The antennas on the DC-8 are capable of imaging with C-band (with a wavelength of 5.6 cm), P-band (68 cm), or L-band (24 cm). SAR images are used to construct an interferogram from the returns recorded at the two antennas using the C-band. This process measures the phase change due to differences in surface height, surface speckle interference, and viewing geometry between two SAR images collected at different angles. The interferogram is also used to recover topography from separate passes over the same region with either P-band or L-band. The comparison of existing digital elevation models with airborne SAR results indicate the accuracy of the airborne data is ~2 m in flat regions and ~5 m in rough topography (Evans et al., 1992; Madsen et al., 1993). The design goal of the system is 1 to 2 m.
The ERS-1 (satellite-based SAR) imaging of the Landers earthquake region is a striking example of the power of SAR to map changes in topography (Figure 3.3). The SAR interferogram demonstrates the powerful capabilities of this technique for constraining the full strain field (Massonnet et al., 1993). Single SAR images can also be used for mapping and for identifying morphologic indicators of faulting. The SAR approach is unique in that it can penetrate clouds and is sensitive to subtle changes in surface slope and roughness.
Applications of interferometric SAR either from satellites or aircraft are best suited for arid, sparsely vegetated regions because rainfall and vegetation create a temporal decorrelation between the images. The decorrelation problem may be addressed with the installation of corner reflectors and the use of ground control. These measures allow changes on the order of 5 mm to be detected (Guignard, 1992). The positioning and orientation requirements are critical, ranging from 1 m and 0.2 millirad (mrad) for single-pass C-band applications, and 2 cm and 0.1 mrad for multiple pass P-and L-band applications. High-quality navigation also becomes necessary when separate passes over a region are required.
Figure 3.3
Detail of coseismic displacements near the June 1993 Landers earthquake determined using interferometric synthetic aperture radar techniques. Each cycle of gray corresponds to a 28-mm displacement toward the spacecraft. (Figure from Massonnet et al., 1993. Courtesy of K. Feigl, Observatoire Midi-Pyrénées, Toulouse).
Airborne photogrammetry is a well-proven technique that uses overlapping aerial photographs to compile topographic maps, for example. The concept is to geometrically relate the camera center, photograph, and ground reference system using bundles of light rays. Traditional photogrammetry relies on the use of ground control points that can then be used to relate a photograph to a three-dimensional reference system, the so-called external orientation process. With the development of precise aircraft positioning techniques, this expensive ground control can be minimized or even removed. The goal is to position the camera accurately at times of exposure so that control is acquired at flight level. Required accuracies vary according to the scale of the photography and generally range from a few centimeters for large-scale mapping to a few meters for small-scale projects. Precise aircraft orientation is also required for single-strip photography without ground control, since there is no definition of the roll component.
Recent developments in airborne mapping include the application of precise positioning and orientation to digital imaging systems (e.g., see Schwarz et al., 1993). As with photogrammetry, accuracy requirements are a function of the digital camera (i.e., spatial and spectral resolution) and flying altitude. In general, required aircraft accuracies do not exceed 0.5 m.
Future Advances in Mapping Technology. Advances in the ability to position airborne platforms precisely has led to rapid evolution of high-resolution topographic techniques. Problems still exist, however, in the following areas: (1) limited usage, which could be alleviated by integrating swath mapping and other topographic technologies with other geophysical techniques; and (2) ground imaging through vegetation, which could be improved by refining both the instruments and the algorithms.
Topographic mapping surveys are rarely flown in conjunction with other geophysical objectives. For example, scanning laser systems are frequently flown in isolation, and photogrammetric missions are flown with little in the survey aircraft except the camera and a GPS receiver. To become more effective geophysical tools, these systems must be integrated with other measurements. This would require a significant effort at reducing the size and power requirements of some systems (e.g., SAR) and ensuring that the technology is available to incorporate these mapping approaches into broad geophysical surveys.
Vegetation, particularly thick and high vegetation, provides a special challenge in airborne topographic mapping. The principal effort under way to circumvent this difficulty is the development of the small footprint laser, which is capable of imaging through holes in the forest canopy. The small footprint and full waveform recovery may lead to the capability of imaging the Earth's surface through vegetation. These and other efforts should be expanded.
Kinematic GPS Technology
GPS technology plays an important role in meeting the positioning, navigation, and orientation requirements of airborne geophysical surveys. These are all kinematic GPS applications because they involve recovering information on the location of a moving object. This section reviews the role of GPS and the present limitations on accuracy for each of these applications.
Positioning Technology
The standard approaches to positioning with GPS technology, in order of increasing accuracy, are as follows:
- pseudorange;
- differential carrier smoothed pseudorange; and
- differential carrier phase.
A number of variations on these approaches exist, depending on which frequencies (i.e., L1 and L2) and codes (P-code, C/A-code, and soon, Y-code, which is generated by multiplying the known P-code by the Antispoofing W-code) are used. An alternative approach involves integrating the Doppler velocity observable into the position solution. Table 3-2 summarizes the accuracies currently recovered from these approaches. Differential GPS positioning technology can provide three-dimensional positioning accuracies on the order of 2 to 20 cm under optimum conditions. Factors that affect positioning accuracies include the distance
between the fixed receiver and the survey aircraft, the hardware, the propagation conditions, and the algorithms used to reduce the data.
The present limitations on the recovery of accurate positioning information for airborne applications are as follows:
- presence of Antispoofing (AS), which makes the P-code unavailable and renders the precise carrier phase solution more difficult and, subsequently, more expensive to recover;
- propagation errors due to ionospheric, tropospheric, and multipath effects;
- loss of a continuous satellite signal due to aircraft motion (cycle slips); and
- inappropriate software. (Most available software was designed for static applications and therefore is not optimized for kinematic data sets.)
The limitations of each are described below.
AS is the planned encryption of the P-code for reasons of national security (the implementation of the Y-code). P-code pseudorange measurements provide crucial information for the precise carrier phase solutions, but as Table 3-2 demonstrates, the accuracy of any solution degrades when the AS system is implemented. For example, when AS is not on, the performance level for the L2 measurements is similar to that of the L1. When AS is on, however, the signal-to-noise ratio (SNR) of the code-limited receivers typically degrades by 1,000 times and thus requires more averaging time to achieve comparable results. The implementation of AS will prevent significant advances in kinematic positioning. (A detailed discussion of the full range of effects of both AS and Selective Availability (SA) is provided in Appendix A.)
Since the fundamental measurement in precise GPS applications is the carrier phase broadcast by the receiver, any phenomenon that delays or modifies its travel time introduces errors into the final position solution. The three major sources of propagation errors are the ionosphere, the troposphere, and multipath. The use of two frequencies in the GPS system largely corrects for the dispersive delay of the ionosphere except in the polar regions where the effect of the ionosphere is greater. The atmospheric delay from space to the surface of the Earth can be as large as 2.5 m for zenith observations and 10.0 m for observations made at 15° eleva-
TABLE 3.2 Present-Day State-of-the-Art of GPS-Determined Position Accuracy* of the Airborne Platform (Moving Along a Straight Flight Path at Speeds Up To 300 Knots).
|
Mode |
Data |
SA Off AS Off |
SA On AS Off |
SA On or Off AS On |
|
Positioning |
|
|
|
|
|
Point Positioning |
L1 C/A P-code |
16 m 1–2 m |
100 m Same as C/A |
NA Loss of P-codea |
|
Differential Range |
L1 C/A L1/L2 P-code |
3–8 m + 5 ppmb 1–2 m + 1 ppmc |
Unaffected Unaffected |
|
|
Differential Carrier Smoothed Range |
L1 C/A L1/L2 P-code |
1–2 m + 5 ppmb 0.5–1.0 m + 3 ppm |
Unaffected Unaffected |
Loss of P-codea |
|
Carrier Phase (bias fixed) |
L1 C/A Dual frequency |
10–30 mm + 1–10 ppm 10–50 mm + 0.1 ppm |
Unaffected Unaffected |
Unaffected Loss of P-codea |
|
Attitude |
|
|
|
|
|
Carrier Phase (10-m baseline) |
L1 |
20´´ (1 s)d |
Unaffected |
Unaffected |
|
Acceleration |
|
|
|
|
|
Carrier Phase |
L1 |
200 mGal (2 s)e |
Unaffected |
Unaffected |
|
* The range in accuracies is horizontal to vertical. A single number indicates that the horizontal and vertical accuracies are similar. Accuracies were compiled from input at 1993 Workshop on Airborne Geophysics. a Loss of P-code can be overcome with a code-limited tracking scheme at the expense of loss of signal-to-noise. In dynamic applications, this loss may greatly reduce the utility of code-limited techniques. In this case, the results would revert to L1 C/A quality. b For L1 only observations, the 5 ppm is taken as representative of ionospheric propagation effects. In some cases, the ionospheric contribution can be <1 ppm and in others (particularly polar and equatorial regions) >10 ppm. c Limited by real-time orbit uncertainty. d Assumes 1-mm differential position determination on a 10-m baseline. In severe multipath environments, results may be significantly worse. e Assumes 1-mm position determinations over intervals of 2 s. Results will be affected by multipath environment. |
||||
tions. With sufficient numbers of satellites and ranges of elevation angles being observed, these delays can be estimated to an accuracy of about 10 mm. The effects of atmospheric delays are larger for higher-flying aircraft and for greater distances from the fixed ground receivers. Multipath is the phenomenon whereby the signal recorded by the receiver did not travel directly to the antennas but reflected off some nearby object such as the aircraft tail or fuselage. This is a significant, but largely undocumented source of error in the airborne kinematic positioning solution.
The loss of signal from a satellite for even a fraction of a second introduces significant errors into a precise carrier phase solution. These data outages are termed cycle slips. Recent receiver technology has greatly improved the ability of receivers to continuously track broadcast signals at the high rates required by the measurement systems. During aircraft turning maneuvers, however, the tail and the wings frequently mask the antenna's view of the satellite, resulting in numerous cycle slips.
The integration of carrier phase positioning techniques with traditional navigation systems may minimize the effect of cycle slips. The integration of GPS with INS creates the optimum navigation and positioning system, with GPS providing the primary long-term positioning system and INS providing the short-term navigation system in an entirely complementary fashion. GPS offers long-term stability and accuracy, while INS possesses short-term sensitivity and precision. Industry is actively pursuing this integration, which is hindered by the relatively high cost of INS needed for cm-level precision.
A last difficulty in the kinematic positioning of aircraft is the state of the reduction software. Typical reduction software was designed to locate isolated points on the Earth's surface, not a rapidly moving aircraft. For short-distance differential positioning (such as aircraft landings), real-time data processing can be used. The most accurate geophysical data processing, which must incorporate the large separation of aircraft and base stations, requires post-processing using precise satellite ephemeris. The data volumes for a 4-hour flight with data collected at 1 Hz at a base station and aboard an aircraft greatly exceed the capacity of these programs. The existing software is also not designed to accommodate multiple base stations, which may be necessary for long-range flights. Finally, these systems cannot easily integrate the other information collected aboard research aircraft into the position solution.
Navigation
In the absence of GPS, precise navigation applications are conducted with surface-based radio navigation networks. These systems, for example, are used widely for landing aircraft (e.g., U.S. Department of Transportation/U.S. Department of Defense, 1992). This approach can provide very accurate navigation information to an airborne platform, but it has the very great disadvantage of requiring time-consuming efforts to install a local network. Real-time GPS navigation provides a viable alternative.
Real-time positioning (navigation) to an accuracy of a few meters is needed to allow repeated surveys of the same flight lines, which are required for global change and neotectonic applications. This navigation requirement is less stringent than the positioning requirements due to the physical limitations on steering an aircraft. For example, a pilot can hold an aircraft to about 6 m of the flight line with GPS information, whereas autopilots do no better than about 10 m.
The presence of induced errors in timing that result from SA, and the inability of the civilian community to utilize P-code reliably because of AS, requires that a real-time differential solution, based on pseudorange or carrier phase technology, be employed for very precise navigation. Efforts to address these issues are being driven principally by the aviation industry's interest in implementing airport approach systems based on GPS technology (e.g., Hundley et al., 1993; Rowson et al., 1994). The navigation requirements for accurate geophysical surveys and the commercial aviation industry are very similar and pose similar problems. For both applications, communication strategies must be developed for transmitting range and phase corrections in differential GPS positioning. Data transmission rates generally must be 50 to 2,000 bits/s to ensure that the required accuracy is maintained. Instead of using base stations and communications dedicated to each survey, it would be useful to integrate commercial or government-provided differential services (e.g., through U.S. Coast Guard, FAA) with airborne geophysical surveys.
Broadcasting GPS corrections has the added potential benefit of validating real-time data. Real-time data validation techniques are important even if high-quality real-time position and velocity solutions are not needed. It is essential to determine whether the data being collected
are valid so that problems can be corrected before significant flight time is wasted.
Orientation
As with positioning, various levels of attitude accuracy and temporal resolution are needed to support geophysical sensors. Typical attitude accuracies are about 1 mrad, although more stringent performance is required for interferometric SAR, photogrammetry, and particularly for vector gravimetry (<0.005 mrad). It is possible to use GPS to recover attitude by interferometry of signals received at multiple antennas over very short baselines (1 to 5 m), with up to 1 mrad in accuracy. This approach was recommended in the report Solid Earth Sciences and Society (NRC, 1993). In general, however, the inertial sensor is more reliable, has higher performance, and is more easily adapted to vehicle installation. It is, therefore, the recommended attitude sensor for airborne geophysics platforms.
Future Directions for Airborne GPS Technology
In light of the present limitations of GPS positioning for navigation and orientation applications, the technology should be improved in several areas. Advances should focus on overcoming the following problems:
- the implementation of AS and SA, which seriously limit the positioning and navigation applications of GPS technology;
- the source and magnitude of the propagation errors attributed to ionospheric, tropospheric, and multipath effects;
- the limitations inherent in current receiver, antenna, and communications systems;
- the kinematic GPS software, which should be improved to enhance efficiency and accuracy of positioning; and
- the integration of INS and GPS technologies to meet the stringent requirements of airborne geophysics.
Issues associated with SA and AS (see Appendix A) need to be resolved, particularly where they have a detrimental effect on airborne applications. Continuing uncertainties have led manufacturers of GPS equipment to spend considerable resources to develop technologies to counter these security systems. Such effort might have been better spent on improving tracking loops and the SNR of the received signals.
The errors introduced by multipath, thermal noise, and the temporal correlation of phase and range measurements must be adequately assessed so that reliable estimates of the noise characteristics of given scenarios can be determined. For example, statistics on how ionospheric effects in the polar and equatorial regions degrade GPS accuracy should be developed so that survey planners will recognize the occurrence and severity of these effects in a particular geographic region. Tropospheric effects can also be a problem under some conditions when the highest possible accuracy is needed, and compensating techniques should be developed.
The GPS receivers that are used to position and navigate airborne platforms should be modified to address the following deficiencies:
- Specialized antennas or processing techniques must be developed to minimize the problem of multipath on aircraft.
- The SNR on L2 codeless receiver modes must be improved to allow better performance in dynamic applications.
- Alternative tracking strategies should be developed to counter AS (Antispoofing), or AS should be turned off.
In addition, postprocessing software should be improved to become more user-friendly, to facilitate quality control, and to allow near-real-time processing and quality control.
Improvements in inertial sensor technology generally center on increasing the reliability and maintenance of the instrument, and on reducing cost, size, weight, and power requirements. Increased accuracy is not the driving factor, especially since the advent of GPS. Because of the navigation and positioning improvements afforded by integrating GPS and INS, however, it is desirable to design tightly-coupled systems containing GPS receiver electronics, micromachined silicon chip accelerometers, and fiber optic gyroscopes. In less than a decade, it is anticipated that such combined units will be no larger than 100 cubic inches, have a
''mean time between failures'' of 20,000 hours, and cost less than $30,000 (today's cost of a high-accuracy GPS receiver).
These improvements will meet the needs of most conventional commercial and military applications, but airborne geophysics applications may require greater accuracy and/or specialized interfaces and data accessibility (e.g., higher data rates). It is likely that the more stringent requirements for airborne geophysics will impose a higher cost, but there are no technological barriers. Even in the most demanding case, that of airborne vector gravimetry, current high-precision INS provides an adequate platform orientation to demonstrate the concept.
Airborne Platforms
The four airborne platforms widely used in geophysical research and development can be categorized as follows:
- discovery mission aircraft;
- process-driven mission aircraft;
- developmental aircraft; and
- experimental aircraft.
Discovery aircraft have been used for more than 20 years in the study of unknown regions. Typically, fast, long-range aircraft such as Hercules C-130s or Lockheed P-3 Orions equipped with one or two measuring systems are used. The line spacing is wide to ensure that the maximum region is covered. An example of a discovery mission is the joint U.S.-British Antarctic Survey radar flights that surveyed much of West Antarctica in the 1970s. Aircraft mapped the ice surface and bedrock topography at a 50-km line spacing and provided the first images of the wide rivers of ice that drain the West Antarctic ice sheet. More recently, discovery aircraft equipped with gravity and magnetic instruments have completed surveys over the subcontinent of Greenland.
Process-oriented aircraft are designed to study specific scientific problems on a somewhat smaller scale and with a broader range of instrumentation. Typically, process-oriented aircraft, such as the de Havilland Twin Otter, fly slower and collect data in more tightly sampled
grids. For example, the CASERTZ (Corridor Aerogeophysics of the South Eastern Ross Transact Zone) program, sponsored by the National Science Foundation, was designed to investigate the interaction of ice sheets with the underlying geology. The program requires accurate measurement of the ice surface, bedrock topography, and the gravity and magnetic character of the bedrock. The track spacing is narrow (5 km) and the targeted features are on the order of 10 km.
Developmental aircraft are those used to prove a technique, demonstrate a technology, or refine a measurement; they are not targeted at furthering our understanding of the Earth's systems. Examples of this approach include using a NASA DC-8 to test SAR technology over known terrain, using small aircraft over Lake Ontario to merge GPS and INS technologies, or flying a Navy P-3 Orion over a well-characterized area to demonstrate the robustness of gravity measurements.
Experimental aircraft are platforms that are still undergoing development, such as airships (blimps) and drones. Airships may be well suited to high-resolution studies due to their slow speed and low altitude flight capabilities, but they have limited weather operating ranges and require a large ground-based crew. Unmanned aerial vehicles, or drones, are used for surveillance, reconnaissance, detection and monitoring of nuclear radiation, hazard avoidance, and data collection in flights lasting 1 to 6 hours, depending on the speed of the aircraft (Ferer and St. Pierre, 1994). Like airships, drones are susceptible to adverse weather conditions, such as turbulence, lightning, and icing, and they require somewhat elaborate ground facilities to catapult the vehicle into the air, monitor its progress, activate the parachute and shock absorber for landing, and recover the aircraft. Because drones were designed for surveillance, they have a relatively small payload capacity. Before their use in geophysical applications can become widespread, light-weight sensor packages and simplified ground control systems will need to be developed.
Each of these platforms is important in fostering a strong technological base and a large scientific user community. To apply airborne techniques to scientific problems, the research community must have access to airborne platforms. There are three primary methods for accessing any of these airborne research platforms:
- A commercial or government contractor provides the full suite of services to the scientist, agency, or corporation.
- A government-sponsored aircraft with government-developed equipment is provided for collaborative research.
- A commercial or government contractor provides the aircraft, and individual research groups install the sensing and positioning equipment.
Access to discovery-oriented and process-oriented platforms is more restricted. In some cases, a contractor may be able to provide the necessary services for a discovery-oriented mission. For example, airborne magnetic services are provided commercially to geophysical researchers. However, contractor services typically focus on collecting one or two principal data types, whereas process-oriented missions have multi-instrument, interdisciplinary requirements.
Access to airborne platforms for technology development is also somewhat restricted. This use typically requires access to an aircraft for significant periods of time and is most easily accomplished within government laboratories or in joint programs between researchers and commercial or government contractors. New approaches must be considered to broaden the access of the wider user community to all of these platforms.


























