
APPENDIX D Hydrodynamics, Physical Models, and Mathematical Modeling1
Marine simulation for channel design and mariner training developed along two parallel and complementary lines—physical scale models and computer-based simulations. The first computer-based simulators were based on mathematical models for a ship's dynamics in deep, unrestricted waters. These early models were coupled with rudimentary bridge mockups controlled by computers. Simulation technology has evolved with improvements in computer hardware, computer-generated imagery (for ship-bridge simulations), and increasing knowledge from naval architects of the appropriate models for ship dynamics.
Beyond ship dynamics, modeling of other operating conditions—including shallow-water effects; restricted-water effects, including bank-suction; slow-speed maneuvering, including anchoring and normal backing evolutions; turning with tugs and thrusters; and ship-to-ship interactions—is more complex than mathematical modeling for ships operating in deep and unrestricted shallow water. The state of knowledge in these areas is technically less advanced. In addition, the modeling of vessels towing barges alongside on a line, or pushed ahead, and the modeling of integrated tug and barge units have only recently received the level of attention formerly given to ship dynamics modeling. Modeling of towing vessels can be more technically complicated than for ships in general.
Complementary developments to ship-bridge simulation capabilities have occurred with the use of physical scale models of ships. The principal use has
been as manned scale models of ships, referred to as manned models, used primarily for shiphandling training. Radio-controlled scale models have also been used for shiphandling training, but only to a very limited extent. Although scale models have not been developed for training in either the coastwise or inland towing industries, where on-the-job training for shiphandling is common practice, they have been used extensively in channel design and to develop maneuvering strategies in new and unusual situations.
The level of trajectory and rates of motion (i.e., vessel response) accuracy and fidelity that are needed and delivered in the replication of ship maneuvering behavior for simulation training in both computer-based and manned-model simulation are debated within the hydrodynamic modeling, marine simulation, and marine education and training communities.
This appendix describes the modeling of vessel maneuvering used in marine simulation, the levels of accuracy present in the various modeling approaches, and where the different modeling approaches and levels of sophistication and accuracy may be most appropriate for specific training purposes. Accuracy and fidelity are also discussed from a modeling viewpoint. What constitutes a vessel's inherent maneuvering capability are described, including how these capabilities affect operations. A brief description is given of the development of modeling and simulation for marine training, with some comments on utility. Future developments are discussed, along with their potential for practical implementation. The final section is a general summary of modeling approaches and levels of sophistication available to support training objectives.
GENERAL DEVELOPMENT OF MARINE SIMULATION
Computer-Based Simulation
Ship maneuvering, a branch of naval architecture, originated from the need to design ships with maneuverability characteristics that either meet specific requirements (turning circle diameter, or tactical diameter, was an early specified requirement) or are reasonable for the mission of the ship. As the mathematical theory and the hydrodynamics of ship movement advanced, more accurate, computer-driven mathematical models were developed to represent and predict ships' trajectories.
Although analog computers were used for early models, digital computer modeling replaced analog because of the complexity of the models used for ship design. Shiphandling simulators capable of involving the human in a real-time experience were developed by combining digital computer-based models with bridge equipment, bridge mockups, and visual projection systems. As computer technology and computer-generated images advanced, so to did the shiphandling simulator (Puglisi,1987). Modern computers made it practical to create ship-bridge simulators for full-mission and multi-mission training. Computers also
made it practical to combine actual radar equipment with mathematical models of vessel behavior to create radar simulators for use as an element of full-mission or multi-task training or as a limited-task or special-task stand-alone training device.
Full-mission, multi-task, and limited-task simulators are, as a rule, operated in real time2 and can appear to be highly realistic. The amount of realism is referred to as "face" or "apparent" validity (NRC, 1992).3 Ship-bridge simulators are used for all types of operational scenarios. Important issues in the use of computer-based marine simulation include:
- whether all of the appropriate vessel maneuverability cues are present in the simulation or correctly portrayed,
- whether the maneuvering response of the ship is actually correct, and
- the relative importance of accuracy in these areas (NRC, 1992).
Development of ship-bridge simulators and simulations is more complex than development of commercial air carrier simulators. Development of visual flight simulators for the commercial air carrier industry is linked directly to the development of specific airframes. The simulators are not modified to permit training on multiple airframes (NRC, 1992). This practice is possible because of the large numbers of similar airframes owned and operated by commercial airlines.
Ship-bridge simulators are developed independent of the vessels they simulate and are routinely adjusted to permit training in other hull forms and sizes. As a result, some simulator facilities use either a number of models to meet the specific application needs of training sponsors or adjust their model to simulate a different type or size vessel. If these adjustments are not correct, the resulting trajectory predictions are inaccurate, regardless of the quality of the algorithms used or the apparent validity of the simulation. For these reasons, it is appropriate to validate each trajectory prediction model or perturbation in a model to determine the capabilities and limitations of the product being delivered to the trainer, the marine licensing authority, and licensing examiners and assessors.
Radar Simulators
Radar simulators are an example of effective use of limited-task simulation for mariner training. Radar simulators, first used for mariner training in the 1960s, were developed separately from ship-bridge simulators. They used
analog computers and coastline generators to generate visual presentations on actual radar equipment. Simple linear equations of motion were used for ship trajectory predictions. Although digital coastline generators were available as early as 1973 for military applications, transition to digital radar simulators in commercial marine applications followed the introduction of digital radars into commercial maritime operations in the early 1980s. Today, virtually all radar simulators use digital data.
The development of digital computers allowed the use of sophisticated, mathematical trajectory and prediction models to drive radar simulations, either independently or as an an element of a ship-bridge simulation. The equations of motion used in stand-alone radar simulators are generally less sophisticated than those used in ship-bridge simulators, because of cost and because a high level of trajectory accuracy is not considered necessary for basic radar, limited-task training exercises.
Radar simulators are operated in real time. When operated as stand-alone simulators, the primary training objective is generally radar plotting rather than watchkeeping or piloting. Understanding the capabilities of the equation of motions used to drive the radar simulation is essential for determining whether a particular radar simulator is suitable for navigation and piloting training. This understanding is especially important where shallow-or restricted-water effects are necessary to achieving training objectives and must be simulated with greater trajectory accuracy than might otherwise be possible with some radar simulators.
Manned Ship Models
Physical modeling of ships was first applied to training in 1966, with the building of the world's first manned-model training facility in France. This facility was initially developed for training ESSO Marine's masters in the maneuvering capabilities and shiphandling procedures for very large crude carriers. At that time, very large crude carriers represented a quantum jump in vessel size, with attendant changes in maneuverability from conventional ships. An engineering organization with extensive experience in port and harbor development was selected as the contractor and has operated the facility commercially since its opening (Graff, 1988). Three additional manned-model training facilities have been developed, one in England, in the United States (at the U.S. Navy Amphibious Base in Little Creek, Virginia), and most recently in Poland. The Little Creek facility, where a number of merchant mariners received shiphandling training in conjunction with Naval Reserve training, was closed in 1993 by the U.S. Navy.
Physical models, in contrast to ship-bridge and radar simulators, always simulate ship motions and shiphandling in fast time because of scaling factors. Manned models are believed by many to provide realistic representation of bank effects, shallow water, and ship-to-ship interactions. The manned-model hull forms and
water medium result in "automatic" representation of the hydrodynamic forces acting on ships during typical maneuvers for the particular ships modeled. Limitations of scale models include the exaggerated effect of wind, restrictions on the number of different ship types and channel configurations, stereoscopic effects of human perception at a reduced scale, and the significantly compressed time scale of operations. In particular, the individual must adjust to vessel size and time scaling during training and interpolate and assimilate the effects to subsequently apply the knowledge, skills, and abilities in actual operations.
Modeling of Towing Vessels
The modeling of vessels that two barges—either by pushing a flotilla, pulling a barge attached alongside, or pulling a barge on a line—is different from modeling a more typical ship design. The focus of this discussion is on push-tows, which are the dominant type operating on U.S. inland waterways.
For pushtows, the basic hull form is dramatically different than a ship and complicates the flow patterns and pressure fields around the hull. The shape is very square and flat, with a relatively blunt bow and stern shape causing severe flow separation. The power unit, with the propellers and rudders, is often relatively small in beam, and there are usually two or more propellers for thrust. Because river operations require significant maneuvering and backing capabilities, towboats are equipped with multiple rudder sets (one in front of the propellers and one behind the propellers) for flanking and steering operations, respectively. Each propeller and rudder set is independently controlled and allows the tow to be operated in modes that are very complex to model (e.g., one propeller operating ahead and one in reverse, both flanking and steering rudders placed to turn the vessel in opposite directions, and the tow either moving ahead or astern). Towing-tank tests show that behavior in shallow water changes from that of finer-formed ships. The flotilla of tows is constantly changing, with barges being added and dropped off during transits.
These flotillas are lashed together with sets of ropes, "wires," or cables, creating a semirigid unit. Tug/barge units with the tow lashed alongside have a very asymmetric shape, with the thrust being applied so that there are strong moments about the unit's center of gravity. Tugs pulling a barge on a line are essentially a multibody modeling problem, with each unit having its own hydrodynamic model, and forces and moments being applied via the line connecting them. Except for the latter case, tug/barge units are typically modeled as rigid units, assuming that they are tightly lashed.
FIDELITY AND ACCURACY
For training purposes, it is important to provide the necessary level of realism and accuracy to support training objectives. Defining the necessary level of
fidelity is important because cost generally increases with the level of realism and accuracy provided.
The Fidelity-Accuracy Relationship
Fidelity refers to the realism, or degree of similarity, between the training situation and the operational situation being simulated. The two basic measures of fidelity are physical and functional characteristics of the training situation (Hays and Singer, 1989). In the case of a manned model, the model contributes to both the physical and functional characteristics of the simulation. In the case of computer-based simulation, the mathematical model contributes to the functional characteristics of the simulation. Fidelity is determined subjectively. The level of fidelity required to achieve training objectives should be based on task needs and training analysis (Hays and Singer, 1989).
Determinant measures may be used to aid in assessing the level of fidelity present in a given simulation. Accuracy is inherently a determinant measure of how close something is to being exact. The accuracy of a maneuvering model is typically determined by measuring variations of the predicted trajectory with the actual trajectory for a given set of controls and environmental operating conditions.
Correlating Realism and Accuracy
In many respects, fidelity is more difficult to address than accuracy, because fidelity involves a subjective assessment of how real the simulation is. Balancing accuracy of trajectory modeling with fidelity of motion in visual scenes, for example, is very challenging. It is possible to provide a believable simulation using a simple trajectory model that, with a few minor validating adjustments, can appear to be realistic to pilots and mariners in a specific harbor and ship situation. Performing different maneuvers than those used for validation, however, can result in quite inaccurate trajectories. All models have limitations in accuracy in various regimes that may not always be avoided by the trainer who may be unaware of these limitations. In general, this issue has not been addressed by simulation providers except to try to use the most accurate modeling approach economically available to them. Given the state of modeling practice, this approach usually results in acceptable modeling.
The accuracy of the trajectory prediction models available to drive a simulation can be compared with the level of fidelity specified by the training analysis as necessary to achieve training objectives. The accuracy of trajectory prediction, for instance, would have lesser importance in courses in which vessel maneuvering behavior was not an instructional objective than in courses in which maneuvering was required to achieve the goal of certain learning situations or was the primary instructional objective.
Deliberate Departure from Realism
It is sometimes possible to enhance training effectiveness by departing from realism. As a general rule, however, in marine simulation, departures from realism are driven by limitations in training resources rather than a conscious attempt to optimize training effectiveness. The most notable exception is the initial development of manned models, a development borne out of practical necessity to safely train the prospective masters of very large crude carriers in shiphandling, which predates the research-psychology literature on training fidelity (Hays and Singer, 1989). As discussed in this appendix, the scaling inherent in manned models is believed by many to enhance training effectiveness, although there are concerns about the effect of scaling factors on individuals who do not have a well-established frame of reference in the operation of ships of the categories being simulated.
Because computer-based simulations rely primarily on software- based mathematical algorithms, there is considerable flexibility that could be used to deliberately depart from realism. In marine simulation, however, the opposite approach has been the rule. Most simulator facilities have sought high degrees of realism to build and improve confidence in simulation capabilities among mariners, training sponsors, and marine licensing authorities.
It is possible to alter the mathematical trajectory prediction models to accentuate certain vessel maneuvering behavior, for example, as an instruction technique to assist a trainee in becoming aware of a particular behavior. As a rule, such an approach is problematic, because it appears that only a few ship- bridge simulation staffs have reached the level of sophistication in instructional design and hydrodynamic modeling to effectively stage and control deliberate departures from realism. As discussed in a later section, there are strong reasons, from a hydrodynamic perspective, to avoid field adjustments to trajectory prediction models.
ELEMENTS OF SHIP MANEUVERABILITY
To understand how simulation modeling techniques differ and to better judge the level of trajectory modeling accuracy necessary for a specific training exercise, it is necessary to understand the phenomena that are being modeled. There are several primary areas into which a ship's maneuvering capabilities can be categorized:
- turning ability,
- checking ability (recovery from a turn),
- course-keeping ability,
- stopping and backing ability, and
- operability at slow speeds.
A vessel's capabilities at different trims and loading conditions, as well as in shallow and restricted waters (channels, banks, and other constrictions), change significantly from those in deep water and in a complex fashion. This section begins by describing the operational results of maneuvering capabilities in deep water. In general, much greater sophistication is required to accurately model trajectories than at other conditions.
Turning, Checking, and Course-Keeping Abilities
Turning, turn recovery, and course-keeping abilities are closely related to the level of dynamic course stability, a characteristic of hull form and rudder. In general terms, dynamic stability is the ability of a vessel to return to steady heading (or initial turning condition) after a disturbance. Figure D-1, for example, shows the response of stable and unstable ships with the rudder fixed, after a
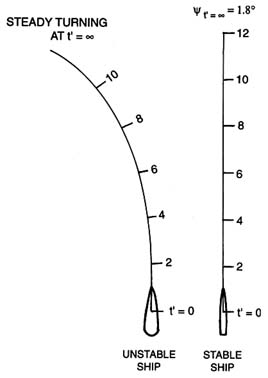
FIGURE D-1
Paths of stable and unstable ships after a yaw disturbance of 1 degree (t' = ship length of travel).
Source: Eda and Landsburg (1983).
TABLE D-1 Principal Particulars
|
|
Hull Form |
||
|
|
A Slender Fine |
B Wide Beam Full |
C Very wide Full |
|
Stability |
Stable |
Unstable |
Very Unstable |
|
Length |
6.95 |
5.0 |
4.0 |
|
Length/Draft |
19.56 |
16.2 |
16.2 |
|
Beam/Draft |
2.81 |
3.24 |
4.03 |
|
Block Coefficient |
0.613 |
0.820 |
0.810 |
|
Prismatic Coefficient |
0.625 |
0.823 |
0.813 |
|
LCGa fwd |
–0.015 |
0.026 |
0.019 |
|
Rudder Area/Length x Draft |
1/45 |
1/53 |
1/48 |
|
a LCG = longitudinal center of gravity. This is the location of LCG forward of midship/ship length Source: Eda and Landsburg (1983). |
|||
yaw disturbance of, say, 1 degree is given from an initial straight course (Eda and Landsburg, 1983). The stable ship eventually comes to a new straight course, which is near the original heading. The heading of an unstable vessel, on the other hand, continues to change with time, until nonlinear hydrodynamic forces override the inherent instability of the hull form. Such a ship requires constant helm corrections to maintain a desired heading.
Many ships have been built with some degree of inherent instability. Typical examples are large tankers, which generally have inherent instability of course at loaded conditions because of relatively large values of the block coefficient and beam-to-length ratios. The degree of instability is substantially increased with an increase in beam-to-draft ratio, which is the case for shallow-draft, wide-beam ships.
The practical effects of dynamic instability can be understood by reviewing trajectory results from three ships with different levels of dynamic instability (Eda and Landsburg, 1983). The type and characteristics of the hulls are given in Table D-1. The solid-line curves in Figure D-2 show steady turning rates (predicted results from Figure D-3 spiral tests) for ships A, B, and C. Arrows along the curves show the sequence of results predicted for the spiral tests. Dotted lines indicate the jump in steady turning rates during spiral tests of dynamically unstable ships B and C. Predicted zig-zag maneuver (Z maneuvers) trajectories were computed for these ships at an approach speed of 14.5 knots.
Results of the simulations for ships A, B, and C (Figure D-4) indicate dynamic behavior during the Z maneuvers. The dynamically stable ship, A, has a small overshoot angle, and can quickly finish a Z maneuver. The unstable ship, B, has a larger overshoot angle, and it takes more time to complete the test than
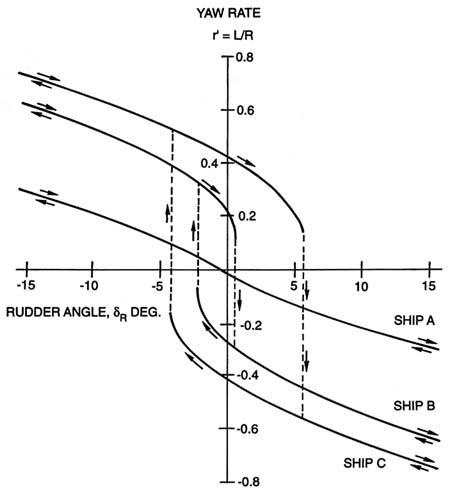
FIGURE D-2 Steady turning rate versus rudder angle.
Source: Eda and Landsburg (1983)
ship A which is stable. While ship B finished the 15-15 degrees Z test in a stable fashion, it could not finish Z maneuver tests of 7.5-7.5 and 5-5 degrees in a stable manner (i.e., heading angle is oscillatory divergent in unstable patterns).
In the case of the very unstable ship, C, where the heading angle is divergent after the first execution of the rudder angle, recovery cannot be achieved by the use of the opposing rudder angle at the second execution. The ship did finish the 15-15 degree Z maneuver test in stable fashion because of the significant contribution of the nonlinear terms.
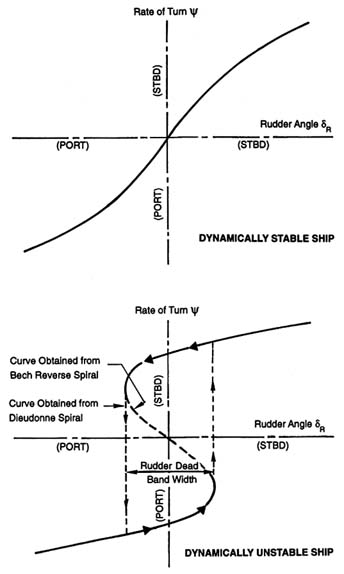
FIGURE D-3
Spiral test.
Source: Adapted from Crane et al.(1989).
Operations in shallow water, in restricted water (including banks), and interactions with other ships also produce significant changes in the dynamic course stability of the hull, which in turn results in different maneuvering behaviors. Vessel draft, and especially trim, are also critical parameters affecting dynamic course stability. Physical models automatically account for these behaviors,
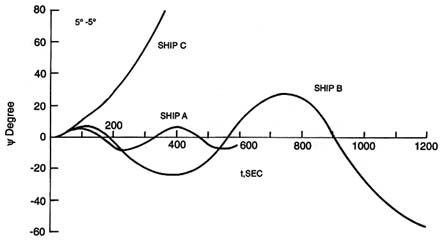
FIGURE D-4
Zig-zag maneuver response: 5-5 degree.
Source:Eda and Landsburg (1983).
although scaling and viscous effects limit trajectory predictor accuracy. Mathematical models must be carefully adjusted for variations, and usually separate model tests are required to obtain proper coefficients for use at different drafts or trims of the ship to provide accurate modeling. Properly modeling the level of dynamic course stability is very important in developing a model that will provide the proper vessel response to ship control actions.
Stopping, Backing, and Operating at Slow Speeds
The quickness and distance involved in stopping a ship is related primarily to its mass, astern power, machinery plant, and gearing. Steam turbines typically provide only 40 percent of their ahead thrust capability while astern. Diesel propulsion plants deliver about 80 percent of ahead power astern. The number of engine starts possible from the compressed air system is important for the direct-drive diesel. Once the air supply is expended, quick reversal of the engine is not possible.
Operation at acceptably slow speeds is also a function of the machinery plant. Direct-drive, low-speed diesels have minimum speeds. The trajectory during a stopping maneuver is very difficult to predict because of the complex flows associated with propeller reversal. Other aspects of slow-speed maneuvering that need to be realistically simulated include the use of tugs, thrusters, and anchors to control or impede the ship's movement.
MODELING OF SHIP DYNAMIC FOR SIMULATION
The basic capability that makes simulation possible is that of modeling (predicting and imitating) the trajectory of the ship under various conditions of the environment and controlling actions and forces. This section discusses the present state of ship trajectory modeling. It also addresses the modeling process for ship dynamics and examines issues of accuracy of trajectory prediction and the difficulty in the use of these models for training.
Accurate modeling of ship maneuvering behavior requires an understanding of and a predictive capability for the significant physical forces involved. This understanding may be based on empirical knowledge gained from full-scale and model experiments or on theoretical descriptions of the pertinent physical processes. In practice, both approaches are useful and are often employed in complementary roles.
Physical Modeling
Technical Factors
The principal mechanisms affecting the fluid pressure acting on a ship, and thus its dynamics, are wave effects and fluid viscosity (friction). To correctly represent wave effects, model tests are performed with Froude scaling (model velocity reduced in relation to the actual ship by the square root of the ratio of the model and the ship's length). It is impossible to correctly scale viscous forces, which are exaggerated at the model scale.
Scale models of ships are used in towing tanks to make engineering estimates of various hydrodynamic parameters, including the resistance (drag force) in calm water and motions in waves. Free-running models with self-propulsion and radio control are used to assess standard maneuvering characteristics, such as turns and zig-zags. Captive models are more useful in developing models because different components of the forces and moments acting on the ship can be measured separately, during prescribed maneuvers, and used in more general contexts to reproduce arbitrary trajectories, as is required in simulation.
Application of Physical Models to Training
Sufficiently large-scale models with self-propulsion and steering can be maneuvered by an onboard crew to simulate actual vessel maneuvers in suitable lakes or other sheltered waters. Manned models offer the advantages of relatively accurate hydrodynamic representation and realistic scenarios, particularly for low-speed operations, berthing, and ship interaction forces.
The hydrodynamic representation of vessel maneuvering behavior is reasonable because actual hull forms are used at the appropriate scale with appropriate
propulsion and control systems. The model, because it is in a real, albeit scaled, operating environment, allows the trainee to physically and visually sense all forces acting on the vessel. For example, the trainee can be observe water movement alongside the vessel, propeller wash, and other cues that are normal to ship operations. Manned models also provide a useful platform for special evolutions, such as anchoring, ''dredging" the anchor, and "backing and filling" maneuvers (also referred to as "standing round turn"). Because the strength of scaled anchors and ground tackle is not sufficient for the forces that are applied, the anchors are not in scale. Therefore, anchors and ground tackle heavier than scale are used. This practice, however, does facilitate the realistic "hands-on" anchoring practice, which at this time is not mathematically well modeled.
Events take place more quickly aboard a scale model than aboard a real ship because of the scaling factors. Scaling results in roughly a 5 to 1 compression of time (depending on the model scale). The compression of time forces the trainee to interpret and respond to the operational scenario more quickly than in real life and significantly shortens the time required to perform the exercise.
Some advocates of computer-based ship-bridge simulators and mathematical modelers tend to view the need for accelerated interpretation and response as detracting from the training value of the simulation because the trainee is forced to react in an unnatural way. Operators of manned-model facilities believe that the accelerated time frame actually enhances performance, because once back on board ship, mariners can think through the situation more quickly and have more time than in the training environment to observe the operational situation develop and to refine their response. Regardless, experienced mariners who have participated in manned-model training generally have found it to be a useful, limited-task, shiphandling training device, particularly for understanding basic and complex maneuvers, with benefits to reallife performance.
Disadvantages with manned models can include the exaggerated effects of wind and practical limitations in providing different ship hulls, channel configurations, bank effects, and currents. A manned-model training facility is limited to the ship models that are in its fleet (from a low of four to a high of nine). New models can be built at an initial cost of approximately $100,000 each, depending on the sophistication of the model.
Only one of the three operating manned-model facilities is able to control water levels, and thus underkeel clearances. The ability to simulate narrow channels, bank suction, and squat effects is also constrained, not by the models, but by the physical layout of the body of water used for training. One facility has a canal with controlled water depths. Currents are sometimes generated in the canal by an outboard engine mounted at one end. Another facility simulates a canal by anchoring sunken pontoons in a lake, but lacks the ability to control water depths, and thus underkeel clearances. The third facility is constructing an artificial canal.
The improper scaling of viscous forces has not been found to be a serious impairment. Scaling factors, however, do introduce inaccuracies in maneuvers and may be particularly important when involving very small underkeel clearances.
The compression of time can be detrimental for trainees who are either unable to adjust to the scaling factors and relate them back to actual vessel operations or who lack the depth of operational experience and frame of reference that would facilitate the necessary adjustment. Nevertheless, instructors at the manned-model facilities report that time compression has not been a problem during training, nor have they received reports of problems in the real-world. Trainees who typically use these facilities, however, are experienced mariners and pilots.
Interactive Effects Using Manned Models
Ship-to-ship interactions can be represented by pairs of manned models operating in proximity. The relevant hydrodynamic interactions between the ships apply if the models are maneuvered in the same manner as the full-scale vessels and if complex trajectories, such as the Texas maneuver, can be simulated. The accuracy of the modeling is affected by viscous scaling effects. The level of accuracy relative to the full-scale vessel has not been formally established. Accuracy levels, however, do not seem to adversely affect training, at least in those cases where the trainee has a full-scale frame of reference for interpreting and correlating the results of manned model to the real-world.4
Interactions in shallow or restricted water require the correct bathymetry to be reproduced in the simulator facility. This reproduction has only been done in a few cases with idealized representations of confined waterways. The principals and practical limitations occur in a facility's ability to provide or construct the essential physical operating environment and to control the water levels at their facilities, and thus the underkeel clearances.
Mathematical Modeling
If hydrodynamic and aerodynamic forces and moments exerted on the ship can be reliably estimated, the ship's dynamic response can be calculated by integrating the equations of motion, a set of coupled differential equations, at successive time steps. These equations of motion simply state that the product of
the ship's mass and acceleration must be equal to the sum of all relevant forces and moments. If the mass and forces are known, the acceleration can be computed and integrated in time to give the ship's velocity and position at a sequence of time steps that are sufficiently small to approximate continuous motion. Such calculations are easily performed on contemporary digital computers.
The principal problem is in the prediction of hydrodynamic effects (i.e., the force and moment exerted on a ship hull as it moves in a time-varying manner through the water). The accepted practice is to perform tests in a towing tank with models of representative ships performing specified motions, measure the resultant force and moment, and generalize these to other motions using empirical formulas.
General Forms of Mathematical Models
All mathematical models are developed based on Newton's second law that the force acting on a ship is equal to the product of its mass and acceleration. This law applies to all three components of motion—longitudinal, transverse, and vertical (surge, sway, and heave). Analogous formulas apply to the moments and angular motions about each of the three corresponding axes (roll, pitch, and yaw). The equations can be written for the 6 degrees of freedom; however, heave and pitch are usually not included in maneuvering simulations, and roll is only sometimes included.
Hydrodynamic forces from the ship's hull, propeller, and rudder are added to the pertinent external forces, which are due to the effects of factors such as tugs, wind, anchors, and fenders. These forces are related to the dynamics of the motion and the hydrodynamic forces induced in the water.
Various techniques have been used to represent these forces and relationships, with various levels of physical and mathematical complexity. The linear forces, which are proportional to the ship's velocity and acceleration, are relatively well understood. Nonlinear effects involving products of these quantities are more complicated, and ultimately are of practical importance in many cases. Early work in this field represented all of these hydrodynamic forces by polynomials with constant coefficients, determined from judicious combinations of theory and experiment for each ship to be considered. Newer approaches, such as those used at the Danish Maritime Institute, use a look-up table and modular data tables so that empirical data can be modified more easily. The trend toward modularization and more physically based models is discussed later.
Determination of Hydrodynamic Coefficients
Much progress has been made in developing formulas to predict the hydrodynamic coefficients for the linear inertial terms of models. The other coefficients, particularly those that are nonlinear, remain difficult to predict. Tests in
which the model is moved in particular motions are used to measure forces on the model. The particular motions eliminate various terms in the mathematical model and allow determination of the coefficients for the active terms.
Some coefficients are developed by towing the model along a straight path at different hull-drift and rudder angles. Special turning basins may be used to obtain similar data when the vessel is in a steady turn. The most comprehensive test procedure is to use a planar motion mechanism. Use of this mechanism permits the model to be driven in oscillatory motions to obtain relatively complete sets of hydrodynamic coefficients both for steady turns and for general unsteady maneuvers.
Most experiments are conducted in wide, deep towing tanks to simulate maneuvering at sea. Insufficient full-scale test data are available for shallow-and restricted-water situations to validate modeling accuracy throughout these regimes. This lack of knowledge is matched by limitations in knowledge about the waterway geometry and current data that are available. Therefore, high confidence is not possible in the trajectory accuracy replicated by the mathematical model in narrow channels and shallow waters with small underkeel clearances.
The accuracy of simulations based on this approach depends on validity at a range of operating conditions, which may differ significantly from the experiments. Obvious examples are when a ship is maneuvering in a channel of restricted depth and width. In such cases the usual practice is to multiply by correction factors or compute forces and moments based on empirically derived functions. This approach accounts successively for the separate effects of the bottom and individual channel sides, notwithstanding their complex interrelationship, and the topology of realistic channels having nonuniform banks. It is here that the hydrodynamic forces pertinent to simulations are most uncertain.
Propeller, Rudder, and Other Control Forces
The correct dynamic modeling of propeller, rudder, and other control forces—such as bow thrusters, and their interrelationships with each other and with the hull—is another difficult task. Generally, modelers have used forces of propellers developed in four quadrants (ship moving forward, propeller thrust aft; ship moving forward, propeller thrust forward; and ship moving aft, propeller thrust aft). It is assumed that these steady-state forces can be added to other forces acting on the hull. In dynamic situations in which the propeller and rudder are being pressed to elicit particular ship movements, however, unsteady dynamic effects may be important. Uncertainties exist regarding the level of accuracy provided in these areas.
Thus, while there is a wealth of data on the performance characteristics of various propellers and rudders in free-stream conditions, the ability to use the data to build up a maneuvering trajectory prediction with the proper propeller, rudder, and hull interactions has not been developed. More effort must be placed
in developing a series of hull-form tests and in determining the interactions among the hull, rudder, and propeller so that the effect of these elements can be determined without retesting. Alternately, use of advanced computational methods can be applied in the near future to develop interaction theories and hull-series relationships.
Bow thrusters are important for slow-speed maneuvers, but their effectiveness diminishes with an increased ship velocity. It is difficult to precisely account for this loss of effectiveness. The use of tugs to assist in ship maneuvers involves complex hydrodynamic and line-force interactions, with substantial changes in the effectiveness of the tugs, depending on their orientation and thrust direction relative to the ship. Anchors can also be used to assist in stopping ships at low velocities, with the effectiveness depending on the characteristics of the bottom, the weight and type of anchor, length and weight of the chain, and the ship's speed over the bottom.
Shallow Water, Restricted Water, and Ship-to-Ship Interactions
The modeling process becomes even more complicated when the effects of shallow water, restricted water (including channel side and bank effects), and ship-to-ship interactions are included. A number of model tests have been performed in shallow water and empirical and theoretical relationships developed. Extensive, full-scale trials of the ESSO Osaka provide data for correlation and verification of maneuvering-track accuracy with respect to unrestricted shallow water (Crane, 1979; Crane et al., 1989). The trials were run at deep water and at two relatively shallow drafts. From these trials, it was found that the effects at very shallow underkeel drafts are substantial.
One important restriction is that the underkeel clearances in these trials, and in most towing-tank tests, are limited by concerns about grounding. Ships operate routinely with smaller underkeel clearances than have been reproduced in these trials and experiments. The effect of small bottom clearances requires further full-scale efforts and experiments to understand properly (NCR, 1992).
Restricted-water situations are even more difficult to analyze. The simple case is a canal where the water depth is constant and the sides vertical. When sloping and nonuniform sides are involved, or simply randomly oriented banks, the situation is more complex. Tests performed with various bank configurations have resulted in a procedure for analyzing bank effects (Norrbin, 1974). Extensive model tests have also been performed specifically for the Panama Canal Commission and the U.S. Army Corps of Engineers.
Ship-to-ship interactions also are complex. There are suction forces and repelling forces that take effect and vary as the ships pass each other in narrow channels. The so-called Texas maneuver is an extreme maneuver regularly practiced in the Houston Ship Channel, which is quite narrow. In this maneuver, two
ships intending to pass each other steer directly toward each other. As they close on each other, they each initiate a relatively small turn, relying on hydrodynamic repelling forces to push their bows apart. As they pass, suction forces (bow to stern) "steer" the vessels back toward the centerline. Similar suction and repelling forces act on the ships from the proximity of the banks to assist with the maneuver. Analytical methods to treat such phenomena exist, but refinements are needed to account for the many nuances related to the particular distances between objects and the detailed flow characteristics, which can change considerably depending on the channel characteristics.
Model tests to study ship interactions, which are generally performed with two ships on parallel trajectories at a fixed separation distance, do not adequately represent the more-complex trajectories involved in the Texas maneuver. Thus, when simulators have been used to instruct shiphandlers in this maneuver, empirical modifications have been made in the model to achieve more-realistic results.
Modeling of Environmental Influences
Because environmental influences, such as wind, current, and waves, affect the maneuvering of ships, it is necessary to represent the effects of these influences realistically in simulations. When the magnitude and direction of the resulting forces are known, incorporating these physical forces into the simulation is straightforward. Uncertainties exist when the environmental effects are variable, for example, when a ship is passing through an area where there are rapid changes in the strength of the wind or current due to land features or bathymetry. The nonuniformity of the current must be properly represented in confined waterways to obtain realistic operational situations.
Physical models have more difficulty in replicating environmental influences than do mathematical approaches. Generally, there is no systematic effort to represent these effects in manned-model training, although currents and waves can be generated, to a limited extent, by one facility. As a practical matter, manned-model facilities must adjust to existing natural conditions. Facility operators assert that varying conditions are characteristic of and consistent with actual operations to which mariners must routinely adjust. Therefore, varying conditions do not adversely affect training, as long as conditions are not so extreme as to create unrealistic scaling effects.
Mathematical models of water currents can be developed using either appropriately developed two- or three-dimensional numerical models of rivers, bays, estuaries, and coastal areas. These flow fields can then be interpolated to determine current variations across and along a navigation channel and incorporated into a simulation model of the navigation environment. The better simulator ship models use these velocity patterns to compute a relative ship velocity to water, which is the basis of the hull, propeller, and rudder-force computations, and to
compute additional drag or drift forces and moments on the ship to account for the moving current.
Because wind effects are exaggerated on small physical models, it is common to assume that this exaggeration of conditions provides a conservative approach for training. Physical models are occasionally used when designing waterways.
VALIDITY AND VALIDATION OF MODELS
Accuracy Requirements
Consideration of model accuracy requirements and validation for ship-bridge simulator training is a subject that generates widely differing opinions. The level of model accuracy required, and the extent to which accuracy needs to be validated, depends on what training or testing is performed using the simulator. Generally, mariner instructors believe that cadet, rules of the road, and bridge resource management training do not require high levels of accuracy, only behavior that is qualitatively correct. For teaching basic shiphandling in deep-water operating conditions, moderately accurate ship hydrodynamic models may be adequate.
High accuracy it generally required for marine pilots and experienced deck officers, who perform at a much higher level of detail and precision in confined waterways than do deck officers generally. Thus, in the context of training for pilotage and specific ship and port operations, the ship, channel, and environmental models need to be as accurate as possible. Pilots will reject simulations if they are not thought to be accurate or true to life. Anecdotal information from operators at simulator facilities suggests that pilots' judgments in this respect may be imprecise or vary among individuals because of different maneuvering strategies for the vessel or waterway being modeled or levels of experience. Furthermore, a particular vessel's maneuvering capabilities may not be fully appreciated; mariners do not routinely operate at the extreme limits of vessel maneuvering capabilities, although the nature of piloting typically brings marine pilots much closer to these limits. For these reasons, a simulation that is modified to meet the expectations of a single expert may not be representative of adjustments needed in the numerical model.
If marine simulation is to be used for the licensing and qualification of shiphandlers, the performance of the ship in the environment in which the operations are to be modeled would benefit from being highly accurate with respect to trajectory prediction and to overall realism needs. Trajectory prediction accuracy in the simulation of vessel maneuverability could avoid creating unrealistic operating conditions that could influence an individual's performance. On the other hand, an individual's familiarity with vessel maneuverability in a particular waterway could potentially mask weaknesses in shiphandling knowledge, skills, and abilities.
Model Validation
Model Adjustments by Simulator Facilities
A properly developed mathematical model will produce, with acceptable accuracy, the motion of a vessel in response to physical forces and maneuvering commands. The validity of the model in various modes of ship operations needs to be established before the model is applied in training. Once a model's validity has been established, it would not be appropriate to modify the model unless some discrepancy in performance were subsequently disclosed. In the latter case, adjustments need to be made by qualified individuals. In every case, model tuning needs to be revalidated for reasonableness and physical and hydrodynamic correctness. Revalidation in those cases in which simulation was officially used in marine licensing would need to meet criteria established for this purpose.
Some guidelines exist for adjusting ship models for different drafts or trim or for adjusting size for geosims (i.e., a ship hull that is geometrically identical but different in size). Some of these guidelines are documented; others are not. Models based on physical tests (such as hydrodynamic experiments in towing tanks) are considered more robust, particularly with respect to modifications. Models based primarily on mathematical curve fitting of test data from different models require careful attention to the development and modification of their coefficients. In each case, validating the models with respect to their ability to produce realistic maneuvering behavior is subjective, because a scientifically based validation methodology has yet to be developed (NRC, 1992).
Ship-bridge simulation facilities that conduct both channel design and training simulations generally, if informally, follow the interdisciplinary validation approach (NRC, 1992). There is, however, a tendency among some simulation facilities to shortcut the validation process. Instead of using an interdisciplinary team, modifications by the instructional staff are permitted, especially for models that have been generated by the staff using modeling routines available in some of the ship-bridge software packages. Facility-generated models of this type are usually developed because a needed model is not available in the facility's software library or because the available model did not perform to the satisfaction of the trainees or instructional staff. The result is that individuals who are self-taught modelers sometimes create and then validate the models that they have developed without the benefit of interdisciplinary perspective to ensure the overall reasonableness and accuracy of the simulated vessel's maneuvering behavior. The involvement of a large number of mariners in validating the accuracy of trajectory prediction may be useful, but such a practice should not be a substitute for including hydrodynamic expertise in the validation process.
There are strong hydrodynamic reasons to discourage field adjustments of mathematical models and ad hoc creation of mathematical models using resident software. Occasionally, however, ship-bridge simulation facility operators are
motivated to take such actions and through trial and error sometimes achieve favorable results with respect to the realism of vessel maneuvering behavior.
Motivations for field modeling might include anecdotal indications of lower fidelity in maneuvering behavior than needed to achieve training objectives, lack of support or untimely support from simulator manufactures for model corrections, and lack of resources needed to develop a model to meet client application needs. Field adjustments are not good practice from a hydrodynamics perspective unless undertaken by an interdisciplinary team of individuals qualified in both the operational and hydrodynamic elements of the simulation or the field adjustments are subsequently reviewed by a suitably qualified hydrodynamicist to validate hydrodynamic fidelity. This approach would also be appropriate for deliberate departures from realism that include adjustments to the mathematical model.
Adoption of interdisciplinary validation of adjustments to the trajectory prediction model would help ensure that marine simulation operators have as complete an understanding of the capabilities and limitations of their simulators and simulations. This understanding needs to be appropriately conveyed to trainees to minimize the potential for training-induced error. The capabilities and limitations of a simulator, and the resulting simulation, are also important considerations when using marine simulation to meet marine simulation to meet marine licensing requirements or applying it directly within the licensing process—for example, for competency assessments.
It should be noted that it is not only the ship model that should undergo validation, but also its environmental segment. The model of currents, channel definition, wind, and wave conditions can be independently verified; but the entire simulation scenario model should also be validated.
Correcting Inaccuracies in the Mathematical Model
When ship performance is found or suspected to be incorrect, the base cause needs to be identified. A series of tests can be performed to isolate deficiencies that need to be corrected. Whether the shortcoming is a ship characteristic, something in the channel or operating environment description, or a combination needs to be determined.
Obviously incorrect simulator behavior can normally be detected by an experienced mariner; however, the cause of the problem may not be readily understood by the mariner. More-subtle problems normally require detection by an individual with expertise with the hydrodynamics and simulated vessel, and, in the case of specific waterways, the route. Normally, this detection can be accomplished using marine pilots from the area being simulated. Occasionally, marine pilots may not be familiar with the vessel being simulated. In these cases, master mariners can be involved for the necessary expertise. The mariner needs to supply an accurate description of the correct and incorrect behavior. Because individual perceptions, expectations, and maneuvering strategies vary, it would be
good practice for another mariner or mariners to also describe the problem to verify its existence.
If the problem pertains to the characteristics of the ship, adjustment to the model are most appropriately performed by individuals familiar with it, because the adjustment in any coefficient need to be correlated with their effects on other coefficients. The knowledge required to adjust the coefficients necessitates the involved of a hydrodynamicist, as well as a mariner expert in vessel behavior. If the problem is with the channel or environment, the adjustments would require expertise in the modeling of channel design effects on vessel maneuverability.
The judgment of an experienced pilot or mariner may not be correct if he or she is not familiar with the specific ship type, size, and hull form. Vessel size and minor changes to the hull afterbody can result in quite different vessel maneuverability characteristics. Comparative model tests may be required to verify expected vessel maneuverability.
FUTURE DEVELOPMENTS
Vessel maneuvering prediction modeling is a developed science that provides highly useful tools for building marine training simulators. From a technology perspective, the future is promising for improving the accuracy, flexibility, and extent of simulator-based training applications. Theoretical and numerical methods are powerful and nearing practical application. Computational power, graphics, and multimedia capabilities and the proliferation of powerful microcomputers enable the use of sophisticated mathematical trajectory models and new approaches for training applications.
Computational Ship Hydrodynamics
Theoretical and Numerical Methods
It is possible to use theoretical and numerical methods to predict hydrodynamic effects pertinent to maneuvers. This procedure depends on contemporary developments in the field of numerical ship hydrodynamics aimed at replacing estimation and synthesis based on towing tank tests. Advantages of the numerical procedure include the ability to model both the ship and waterway bathymetry in their actual configurations. Ship-to-ship interactions can also be treated in their precise time varying relationship, overcoming the limitations of straight parallel courses.
Viscous Effects
In the absence of significant viscous effects, potential theory can be used. Substantial progress in this area has been made using panel methods where the
ship's surface (and surrounding channel topography in some cases) is represented by a large number of small panels. Such methods give useful predictions of ship interactions in channels (Kaplan and Sankaranararyanan, 1991).
When viscous effects are important, as in cases of very small underkeel clearance or low-speed maneuvering, it is possible to use three-dimensional solution of the complete equations of motion for the fluid, including viscosity (the Navier-Stokes equations). Developments in this field are currently expanding (see NRC, 1994). The computational burden is substantial, and implementation to real-time simulations will require future improvements in computer hardware. Navier-Stokes solvers may be useful in special applications—for example, to study the effects of very small underkeel clearances where viscous effects are important and where the computational domain is relatively compact. These application could then lead to improved functional relations that could be used in modular real-time simulator models.
Some ''zonal" computations have been performed, which combine a viscous solution close to the ship with a simplified solution far away. This approach has been used for research programs dealing with steady motions of ships to predict the drag force (Larson et al., 1990). Extensions to unsteady yawed motions are anticipated and may offer an effective compromise between the relative simplicity of potential theory and the computational demands of Navier-Stokes codes. While these methods are as yet unproven in the context of ship maneuvering, they have been extensively developed for research on steady-ship resistance, ship motions in waves, and propeller hydrodynamics. It is possible to include all these effects in a comprehensive model for maneuvering simulation.
The effect of waves on ship maneuvering is considered by Ottosson and Bystrom (1991). Special examples in which wave effects are important include training of shiphandlers for extreme storm conditions (encountered rarely but where experience in safe heading and maneuvers may be vital to the safety of the vessel) and the navigation of ships in entrance channels of restricted depth when waves are present.
Microcomputer-Based Shipboard Simulation
Although physical models, shiphandling simulators, and radar simulators will continue to be the major types of simulation available for full-mission, will continue to be the major types of simulation available for full-mission, multi-task, and limited-task training, new approaches will expand the traditional media that are available for training. The desktop microcomputer with standard PC compatibility has achieved sufficient computing power to offer a platform for real-time (and fast-time) simulation. PC-based training software suitable for use on board or ashore have already been developed Onboard PC simulator training capabilities from such simulations for real-time navigation of the ship. Such simulation applications will lead to the need for high-fidelity trajectory prediction
models that are ship-specific and which can adjust to restricted waters with bank, shallow-water, and ship-to-ship interactions.
Microcomputers are becoming more common on board ship, so that it is technologically possible to perform simulations for training, practicing, and previewing specific transits.
The modeling of ship dynamics, including channel bathymetry and other ship, can be accommodated within the computational resources of contemporary desktop microcomputers. Principal limitations are with user interfaces, including the bridge mockup, controls, and visual images. The user is placed in a simplified training environment, in contrast to a situation in which the participant is placed inside a more complete training environment associated with a full-mission ship-bridge simulator. The same mathematical model can be use to drive virtually any form of computer-based marine simulation.
Future trends are expected to enhance microcomputer simulation capability. It is already possible to interface shipboard computers with modern ship systems and instrumentation. The actual bridge controls and instrumentation could be used (during periods when it would not conflict with normal navigation) to provide a realistic operating environment, except for the visual image. The use of this equipment by on-watch personnel could, however, be viewed as distracting them from their primary watch responsibilities. It is also possible to derive ship specific inputs (normally derived from towing-tank tests) directly from operational measurements. For example, correlations of the ship's velocity, propeller revolutions, and rudder angle with accurate measurements of position and heading offer the possibility to derive hydrodynamic maneuvering coefficients that could be more accurate and specific to the ship and its environment. Onboard acquisition of such information can provide improved modeling of specific ship and waterway conditions. Previewing ship movements would then be even more useful for training. Such extensions of existing methods could also be used to enhance the fidelity of land-based simulators.
Physical Versus Mathematical Models
Physical models provide a simple approach to imparting knowledge on the hydrodynamics of ship motions in deep water and close-in operations, including docking, coming alongside, shallow water, banks, and ship-to-ship operations. Action is quick, several times faster than real time; for example, it is 5 to 1 for a model at 1 to 25 scale. The compressed time frame and layout of the training facilities result in virtually continuous training of the mariner while operating the manned models. The scaling of the dynamics results in propulsion and rudder action modeling inaccuracies, and human stereoscopic vision is more acute than on the ship because of the spread of human eyes when related to the scale of the model. Currents, wind, and waves are difficult to model, and usually done to only a limited extent, and then not at all facilities.
Computer-based simulations have considerable flexibility in that a situation can be replayed or played with changes in situation or reality. Mathematical models are more accurate and reliable in deep-water situations. Their abilities in shallow water and bank situations are more uncertain, and there is insufficient full-scale data and proper bases for accurate prediction in these conditions. Significant progress has been made in this area.
The ability to model rivers, estuaries, and coastal areas is continuing to improve with the continued development of three- dimensional models that can more accurately reproduce complex bathymetry and current patterns. Validation is a problem in that the opinion of pilots or experts on how the ship reacts in the real-world are used to make adjustments to the model. These adjustments may or may not be correct. How the adjustment are made may vary from facility to facility. Standards need to be developed and guidance provided to simulator users so that inappropriate adjustments are not made. Further full-scale measurements of ship maneuvering characteristics are needed to validate the theoretical and mathematical models and to provide a model that is defendable from expert criticism.
The rapidly expanding availability of differential global positioning system reference stations and systems provides great promise for obtaining accurate measures of ship behavior in restricted waterways that have heretofore been difficult and not economical to obtain.
Validity Requirements
From the modeler's perspective, the simulator user must specify what accuracy is needed for particular training objectives. The simulation modeler, physical or mathematical, can then assess whether that accuracy can be provided. Pilots, for instance, need very accurate models to properly portray bank and other sophisticated situations, whereas a less robust model may suffice to introduce very basic operational concepts and procedures to beginners. Regardless model validation requirements need to be based on the training objectives that the simulation is intended to support.
The use of an expert to validate a model is also problematic when the ship differs from the one the expert is familiar with. A similar appearing vessel can have significantly different maneuvering characteristics because of different levels of dynamic stability due to design of the hull or appendages. A change in vessels size also can provide quite different responses.
The ship-bridge simulator appears to be able do everything. It has all of the controls and appears to the trainee to be real. The trajectories provided by the model may be highly accurate for many situations, but could be totally wrong in others. Experts in vessel operations could provide the modelers with knowledge of where their models fall short and warn trainers of conditions where the model's behavior is sufficiently different from actual behavior of a real ship.
Operational Environment
There has been a substantial development of simulated scenario areas for U.S. ports and waterways accomplished by the U.S. Army Corps of Engineers for navigation project improvements. Navigation environments that may have been modeled for other purposes could also be used or modified to develop navigation training scenarios. Consideration should be given to how these models could be used in developing verified environments for training requirements.
Flexibility Needs
Numerous mathematical models are currently use to drive various simulators. Hydrodynamic coefficients use in the models cannot be easily exchanged. If one simulation facility has a need for a ship's model it does not have, acquiring it is difficult. A standard method for exchange of models or modeling coefficients would facilitate the sharing of important technical information. Modularity of the models is also needed so that a module can be replaced with more sophisticated versions when available without requiring overall modifications.
Validated and practical theoretical solutions for coefficients are needed, particularly to represent nonlinear hydrodynamic effects. Such formulations would provide a more objective basis for models and help with validation by supplementing the subjective validation of model (and simulator) performance. The more physically based models can be, the more flexible and readily adaptable the models will become.
Software Issues
As with any large computer program, the software developed for ship simulation is subject to various potential limitations. These include:
- errors or restrictions in the assumed hydrodynamic model,
- numerical errors due to the reduction of the model to computational form (such as time steps that are too large),and
- programming errors (bugs).
As programs become older, age and insufficient maintenance may inhibit their relative quality and relevance, unless special efforts are invested to provide updated versions. Computer programs developed for ship simulation require substantial in vestments of expertise and effort, and this investment is normally protected by licensing agreements. Further protection is often achieved by distributing the code in an executable form that cannot be modified or transferred among different computational environments. Public-domain software is a preferable alternative from some user' standpoints and offers the significant advantage that it can be shared within the simulation and hydrodynamics communities to
enhance exchange of ideas, correction of errors, and improvement of hydrodynamic models. This concept of "open" software is particularly suitable if simulation is associated with mandated requirements and, more generally, to facilitate simulation validation.
Research Needs for Model Improvement
Computation fluid dynamics holds great promise as the solution to current modeling problems. Practical developments and use in bridge simulators cannot be implemented until existing research codes are applied to the specific computational tasks of maneuvering simulation. Two different level of implementation can be envisaged.
At the first level, computational methods can be used to complement towing-tank testing in the determination of hydrodynamic coefficient. Examples where computational methods can play a useful role include ship-to-ship interactions in restricted channels and the use of Navier-Stokes solvers to considers ship operations with small underkeel clearance in shallow water.
At the second level, where computations of pertinent hydrodynamic effects can be performed with sufficient accuracy and speed, this approach can replace the traditional approach based on curve fitting. This may be particularly useful for ship interactions and restricted water effects, where existing simulator models are severely limited. The possibility now exists, based on three-dimensional panel methods, to compute the relevant interaction forces and moments during the simulation, based on the actual ship trajectories and channel topographies, and avoiding the uncertainties and limitations emphasized above.
Current mathematical models would benefit from being modularized and validated in parts so that the science of modeling can progress and accuracies can be better established. Full-scale experiments also are needed to advance the state of practice in modeling, particularly for shallow water and restricted waters with banks. The process of certification of models and validating changes needs improvement. Modeling of operations at slow speed and with reversing propeller situations also needs improvement.
With respect to mariner licensing, the lack of standardized mathematical models would make it difficult to ensure the equivalency of the vessel maneuverability basis for evaluating mariner performance. To the degree that vessel maneuverability could affect individual performance during evaluation, it would be beneficial to provide standardized ship models. A standards set of harbor operating conditions could be developed for specific ships that can be accurately validated against performance measurements and used as a consistent basis for assessing mariner competency. Since accurate ship model and channel environment models are required for some purposes, it would seem reasonable to use such models for all purposes.
MODELING REQUIREMENTS FOR SIMULATOR-BASED TRAINING
The appropriate modeling approaches, their levels of accuracy and sophistication, and their utility for a accomplishing effective simulation training conceptually depend on the specific training objectives that need to be satisfied. As a practical matter, simulation capabilities are developed independently or training objectives. As a result, it becomes necessary to compare training objectives to available simulation resources to determine the suitability of simulation as a training medium or of specific simulation resources to meet specific training objectives.
Manned models offer an alternative to on-the-job training, subject to the trainees ability to adjust to the scaling factors and then to correctly translate the lessons learned back to the real-world. As suggested earlier in this appendix, the manned models are highly suitable and effective in instructing the experienced mariner and pilot about the principles of ship maneuvering and hydrodynamic interactions. Simulation-based shiphandling training for specific ports and waterways must necessarily rely on ship-bridge simulation capabilities with mathematical models. In this case, it is important that the accuracy of the trajectory prediction model is understood by all involved in a simulation so that false expectations are not created relative to real-world operating conditions.
The modeling of towing vessels alongside of pushing ahead and of integrated tug-and-barge combinations has not received the attention that has been given to the modeling of ship dynamics. Towing-vessel control modules with flanking rudder capabilities are available at only a few marine simulation facilities, limiting the availability of simulation training for towboats that routinely use this equipment. The type of operational situations that these vessels function in are almost always restricted waterways with strong currents, thus requiring highly developed environmental models for accurate training situations.
REFERENCES
Crane, C.L. 1979 Maneuvering trials of a 278,000 dwt tanker in shallow and deep water. Transactions of the Society of Naval Architects and Marine Engineers 87:251–283.
Crane, C.L., H. Eda, and A.C. Landsburg. 1989. Controllability in Principles of Naval Architecture. Jersey City, N.J.: Society of Naval Architects and Marine Engineers.
Eda, H., and A.C. Landsburg. 1983. Maneuvering performance analysis during preliminary ship design. Pp. 179–186 in Proceedings of Second International Symposium on Practical Design in Shipbuilding. Tokyo: Society of Naval Architects of Japan and Korea.
Graff, J. 1988. Training of maritime pilots—the Port Revel viewpoint. Pp. 62–76 in Proceedings of Pilot Training, Southampton, England, July 12–13.
Hays, R.T., and M.J. Singer. 1989. Simulation Fidelity in Training System Design: Bridging the Gap Between Reality and Training. New York: Springer Verlag.
Kaplan, P., and K. Sankaranararyanan. 1991. Theoretical analysis of generalized hydrodynamic interaction forces on ships in shallow channels. Transactions of the Society of Naval Architects and Marine Engineers 99:177–203
Larsson, L., L. Broberg, K.J. Kim, and D.H. Zhang. 1990. A method for resistance and flow prediction in ship design. Transactions of the Society of Naval Architects and Marine Engineers 98:495–535.
Norrbin, N.H. 1974. Bank effects on a ship moving through a short dredged channel. Pp. 71–88 in Proceedings of the Tenth Symposium on Naval Hydrodynamics. Cambridge, Massachusetts, R.D. Cooper and S.W. Dorof, eds. Washington, D.C.: U.S. Government Printing Office.
NRC (National Research Council). 1992. Shiphandling Simulation: Application to Waterway Design. W. Webster, ed. Committee on Shiphandling Simulation, Marine Board. Washington, D.C.: National Academy Press.
NRC (National Research Council). 1994. Proceedings of the Sixth International Conference on Numerical Ship Hydrodynamics, Iowa City, August 2–5. V.C. Patel and F. Stem, eds. Washington, D.C.: National Academy Press.
Ottosson, P., and L. Bystrom. 1991. Simulation of the dynamics of a ship maneuvering in waves. Transactions of the Society of Naval Architects and Marine Engineers 99:281–298.
Puglisi, J.J. 1987. History and future developments in the application of marine simulators, tomorrow's challenge. Pp. 5–29 in Proceedings MARSIM '87, Trondheim, Norway, June 22–24. Trondheim, Norway: International Marine Simulator Forum.
SNAME (Society of Naval Architects and Marine Engineers) 1993. Proceedings of the Workshop on the Role of Hydrodynamics and the Hydrodynamicist in Ship-Bridge Simulator Training, Jersey City, October 22. Jersey City, N.J.: SNAME.





























