
4
Sensors
Introduction
Although many factors contribute to the success of any military operation, it has long been recognized that information is one of the most important—information in many different forms and acquired on many different time scales.
Information
During conflict situations several different kinds of information come into play. At the highest top-down level is situation awareness. Warfighters must understand everything that they can about the nature of the opposing forces—their current positions, their movements, their composition, their infrastructure, their capabilities, their communications, their weapons, their threats, their plans. The more the better—in real time on a scale that ranges from minutes to hours—and not what they were doing a day ago, but what they are doing right now. Obviously, for maximum cooperative effectiveness the United States ought to have the same complete picture of its own forces, distinguishing accurately between friendly and adversarial forces to minimize or eliminate friendly-fire incidents. To complete the scenario, an accurate, real-time picture of the environment is needed—e.g., the details of the terrain, the current and anticipated weather or sea conditions, the presence or absence of mines, and so on. Generally, in real conflicts, only a few of these factors are actually known to the degree desired—knowledge of some may be stale and out of date, and other factors may only be guessed at and some completely unknown. The better the job U.S. forces do in
achieving valid situation awareness, the larger the potential competitive advantage they can enjoy.
On a shorter time scale, from the bottom-up point of view, effective utilization of weapons requires detailed and timely—fractions of seconds to minutes—information about both the targets and the weapons themselves. Targets must be recognized as such, their positions localized instantaneously, their motion measured to high precision, their most vulnerable aim points identified, and so on. Similarly detailed continuous information about the weapons is needed to aim or guide them to a successful interception of target—e.g., weapon position, inertial parameters (such as orientation, velocity, and acceleration), and environmental parameters (wind and tidal currents). On a much longer time scale, outside actual combat situations, information is needed in several forms to provide for such necessities as equipment maintenance and support and overall logistics. For example; it is necessary to know what has failed or is about to fail, or what the weather will be tomorrow.
Sensors
To acquire desired information, measurements of all kinds of physical parameters must be made. The devices that permit these measurements are known broadly as sensors. The term "sensors" encompasses an enormous range of technologies and devices. Some can be as simple and old fashioned as the direct measurement of a local temperature by means of a thermocouple, and others can be as modern as the detection of a biological agent by a miniaturized mass spectrometer, or as complex as a synthetic aperture radar (SAR) all-weather imaging system. In all cases, whatever the sensor, an interaction between the sensor and its local physical environment results in the generation of some kind of signal, generally a form of electrical response of the sensor's physics, chemistry, and biology to the physics, chemistry, and biology of the outside world. The interpretation of these sensor signals through signal processing, data fusion, and the like leads ultimately to the extraction of the desired information.
Sensor Categorization
Operational Modes
Sensors, whatever information they are attempting to collect, can be broadly classified into two categories of operation, passive and active, which are defined as follows:
- Passive sensors simply measure and report on, via their response signals, whatever they detect in their local environment. In a sense they just listen. A thermometer and video camera are good examples of passive sensors. Even
- though a passive sensor responds only to local physical phenomena, the information may well be coming from a distance—perhaps in the form of photons of light that travel from the objects or scene of interest and impinge on the sensor's detectors to produce the necessary local interactions. From a military point of view, passive sensors have the great advantage of producing valuable information without emitting any signals of their own that might give away their position and expose them to possible retaliation.
- Active sensors, on the other hand, typically stimulate the environment by generating and emitting known signals, which propagate out to the objects or targets of interest, interact with them, and reflect or scatter energy back to the sensor, which then responds as in the passive mode. Because the self-generated signals have known properties, it is often possible to use signal processing to extract very weak emitted signals returning from the objects of interest from the inevitable competing noise and clutter-generated signals in the sensor. Although operating in an active mode reveals the location of the emitting source, it is sometimes the only practical way to collect the desired information. The most familiar example is radar. If an object of interest is itself not emitting electromagnetic radiation, the only practical way to provide the desired geometric information about the object's existence, location, motion, size, shape, identification, and the like is to illuminate it deliberately. Although frequently the transmit and receive functions are combined in the same hardware, they do not have to be physically co-located. In the context of radar, this variation or active sensing is known as bistatic; in missile guidance, such a configuration is referred to as semiactive, in that the missile itself operates in a passive mode, whereas the target is actively illuminated by a separate source.
Sensors that operate on the basis of wavelike, propagating physical phenomena such as electromagnetic waves, e.g., radar and laser detection and ranging (LIDAR), or acoustic waves, e.g., seismic sensors and sonar, can be operated in either passive or active mode to collect different kinds of information. Sensors based on nonpropagating phenomena such as those that sense chemical compounds or accelerations (initial sensors) operate only passively.
Physical Phenomena
The range of sensor types of interest to naval forces is enormous. Box 4.1 lists the basic physical phenomena that underlie the types of relevant sensors. As can be appreciated from this list, the subject of sensors is very complex, involving a large number of apparently quite disparate technical disciplines.
Generic Sensor Model
Each of the physical phenomena listed in Box 4.1 is discussed below in more detail in the context of the current state of the art and projected possible future
|
BOX 4.1 Physical Phenomena Underlying Sensors
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
performance capabilities of the sensor technology associated with each. Although useful for better appreciation of the individual sensors and sensor technologies, this approach can be quite confusing when it comes to projecting the future because of the great variety in sensor types and related details of technology that mask their underlying common features. This section discusses sensing in general and the common concepts and issues that characterize all of sensor technology. Five critical technologies—semiconductor, superconductor, digital, computer, and algorithm technologies—appear to be common to all sensor types, and careful delineation of these greatly simplifies the difficulties of projecting future sensor capabilities. Insofar as it is possible, for each identified common critical technology, quantitative performance projections based on today's historical performance growth patterns are discussed below as clues to future potential. A model of a generic sensor is shown in Figure 4.1.
Sensor Interface with the External World
The first thing that must be considered is the interface between the sensor and the physical phenomena to be sensed. For some classes of sensors, e.g., chemical or biological sensors, physical samples of atoms or molecules or chunks of material must be collected and inserted into the sensor's detection mechanism. The design of this kind of interface permits a good deal of flexibility and no doubt will vary considerably over time.
Sensors such as LIDAR designed for propagating phenomena collect samples
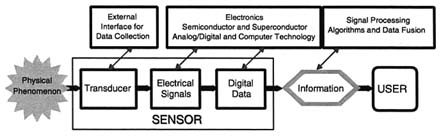
FIGURE 4.1 Generic sensor model.
that are less material in character and more wavelike; e.g., the detected objects are photons or phonons. However, the interfaces for such sensors are highly constrained by the free-space wave-propagating physics of the phenomenon being sensed: Whatever the details of the implementation technology, the sensor interface to the outside world must provide an appropriate wave equation impedance match. The details of the sensor implementations can be altered by the designer, but the outside world's physics is whatever it is and is not under the control of the designer or the sensor. When sensor performance capabilities are projected into the near and far future, the interface constraint remains invariant—e.g., although it will be possible, with time, to compress more and more digital and computing capabilities into ever-decreasing volumes, the dimensions and characteristics of the radar aperture needed for a given task will remain basically the same. Beamwidth requires so many free-space wavelengths across the aperture, and grating lobe suppression requires a certain minimal spacing of elements, again in terms of the free-space wavelength. Certain characteristics of the interface are, and will always be, independent of the technology used to implement the sensor hardware.
For sensors—e.g., inertial, gravitational, and time—as the sensors are totally and inextricably immersed in the phenomena to be sensed, the concepts of external world interface and collection are simply moot.
Detection
Once properly interfaced to the external world, the sensor must selectively detect the manifestations of the phenomena of interest and produce signals that can be used to quantify and convey the desired information. Although in the past many simple sensors used purely mechanical means of indicating the detected signal, as, for example, an automobile thermostat or a thermometer based on the motion of a bimetallic strip or membrane, most sophisticated sensors of interest to the Navy and Marine Corps indicate the results of detection as an electrical signal—a modulated voltage or current. Even though the physical phenomenon being sensed may not be directly electrical in nature, but rather chemical or
biological or acoustic, the detection is usually accomplished by using the phenomenon of interest to generate or move free electrons, thereby transducing the physical manifestations into electrical signals. For example, microwave signals are detected by causing the associated time-varying electromagnetic fields to induce currents in electrons already available in conducting elements of the sensor. Optical signals generally use the large energy inherent in each photon (E = h![]() ) to kick loose bound electrons to create free electrons that are then collected and/or moved to produce measurable charges or currents. Other sensors use mechanical components that move under the influence of the physical phenomenon to be sensed but that are also part of an electrical capacitor or other circuit element so that the resulting motion alters the circuit parameters, thereby modulating an electrical signal in an interpretable way. Chemical and biological sensors use yet other techniques to produce electrical detection outputs.
) to kick loose bound electrons to create free electrons that are then collected and/or moved to produce measurable charges or currents. Other sensors use mechanical components that move under the influence of the physical phenomenon to be sensed but that are also part of an electrical capacitor or other circuit element so that the resulting motion alters the circuit parameters, thereby modulating an electrical signal in an interpretable way. Chemical and biological sensors use yet other techniques to produce electrical detection outputs.
The technology for processing signals that are electrical in form is well understood, and the future capabilities of many diverse sensors can be projected in terms of electrical signal processing technology. Electrical signals are now uniformly dealt with via electronics. Modern electronics is uniformly based on semiconductor technology, and projected progress in semiconductors is often directly translatable into valid projections of improved sensors and sensing. In addition, superconductor technology offers many attractive ways of dealing with electrical signals that operate on the basis of quantum effects that are quite different from those encountered in semiconductors. Although still very much in development, because of the great promise and the recent progress demonstrated, progress in superconductor technology must also be carefully assessed for application to future advanced sensors.
Although electrical signals from independent sensor elements are often combined directly today in analog form, increasingly they are converted immediately to digital format. It is virtually certain that this will be the only approach considered in the future because of the many proven advantages of digital technology. Thus, projected progress in digital technology will be directly translatable into projected improvements in sensors and sensing.
Information Extraction
The stream of digital data emerging from each individual sensor element, e.g., each pixel of an IR focal plane array or each receive element of a phased array radar, must be assembled, stored, processed to extract the desired information, and communicated to a user—sometimes a human and sometimes another mechanical/electronic device—that can use this information for guidance and control or some other purpose. Progress in all aspects of computer technology, and particularly algorithm technology, will translate directly into improved, more capable sensors.
Relevance: What Do Sensors Do for the Naval Forces?
That sensor technology, in its myriad embodiments, is critical to the success of all naval force operational tasks or missions is obvious (Box 4.2). Whenever information is required, sensors are utilized to make the physical measurements from which the desired information is extracted. Radar, optics, and sonar sensors, through the active or passive exploitation of the physics of wave propagation, give information about distant objects that is useful for general surveillance and situation awareness as well as for more specific purposes, such as real-time target location and weapon guidance. Other sensors, such as position-sensing devices or inertial sensors, produce useful real-time local measurements that can be used to control all kinds of platforms, including whole ships, steerable radar or communication antennas, and gun mounts on ships, or even individual missiles in flight, depending on just where the sensors are located. Yet other sensors produce measurements for which the long-term variations in the measured parameters provide the useful information. For example, temperature or atmospheric pressure sensors can supply inputs for short- and long-term weather prediction, whereas acoustic sensors mounted on rotating machinery can provide evidence of bearing wear or imminent gear failure, thus triggering needed repair and maintenance procedures.
In short, naval forces are heavily dependent on the use of sensors today, and the future seems to promise even broader use of sensors as the technology continues to evolve toward more capable performance and the demand for more and better information escalates. Future sensors, as compared with existing implementations, promise to cost less, have higher sensitivity and precision, be available in much smaller, lower-power packages, and perhaps be capable of measurements currently unimagined (i.e., be completely new types of sensors).
Technology Status and Trends
Despite the dangers in attempting to project tomorrow's technology entirely in terms of what we see today, doing so can still impart valuable lessons. Preceding
|
BOX 4.2 Sensor-dependent Operational Tasks and Missions Situation awareness General foe/friend information Surveillance Threat detection, recognition, and localization—general or specific Weapons targeting—offensive or defensive Logistics and maintenance |
|
BOX 4.3 Technology Trends Common to all Classes of Sensors
|
the panel's discussion of the five technologies critical to all modern sensors is a brief review below of the technology trends that are evident in today's developments and that are shared, in some way, by all classes of sensors (Box 4.3). Toward the end of this chapter, the panel speculates on the impact of sensor technologies on tomorrow's naval forces, touching on other possible future directions, not so evident today but desirable from the user's point of view and not obviously incompatible with some law of nature.
Solid-state Technology
The most obvious overall trend of significance in technology today is solid-state technology's dominant role in both analog and digital electronics. Today's digital circuits are solid-state—the semiconductor transistor, in one form or another, is the workhorse of the industry and the foundation for all practical digital IC implementations. Its one evident competitor, lurking in the background but always gaining grounds, is another solid-state technology—superconductors, e.g., Josephson junctions, superconductor quantum interference devices (SQUIDs), and RSFQ logic.
Even in the analog world, solid-state technology has come to dominate the audio and video amplifiers in entertainment electronics. In the last decade or so, even the generation of microwave power for radar and communication applications has come to be realized increasingly often in solid-state form. Although many legacy microwave systems still generate RF by means of tubes, all new radars are automatically assumed to be some form of solid-state phased array, and soon the only place tube technology will be found is in microwave ovens. Today, magnetrons are still cheaper than the equivalent power transistor, but that may not last as solid-state electronics continue simultaneously to improve in performance and fall in price.
Given this widespread trend, it seems likely that all future advanced sensors will process their detected electrical signals with some form of solid-state circuitry. It can be expected, then, that advanced sensors will share in the continually improving aspects of solid-state technology, that is, increasing miniaturization, higher speeds, decreasing power per function, increasing device density and complexity via IC manufacturing techniques, integral packaging concepts, and decreasing unit costs. A spin-off application of semiconductor manufacturing to three-dimensional micromachining of silicon (Si), enabling the development of MEMS, has already produced a range of novel sensors and actuators with significant performance and cost advantages over the conventional forms.
Atomic-level Manipulation
One of the most exciting recent technology developments is the growing ability to manipulate matter at the atomic level. Largely because of the efforts applied to the fabrication of solid-state devices and integrated circuits, through mastery of thin-film deposition techniques and the physics and chemistry of surface phenomenon, it is now possible to control material and structural fabrication at the level of the individual atoms. These skills have already been used to create artificial materials with unique characteristics, e.g., alternating-layer semiconductor structures for advanced microwave devices, integrated multilayer Bragg reflectors for photonic applications, magnetic structures with as many as 50 alternating layers of iron and chromium for giant magnetoresistance sensors, biologically inspired self-assembling layered materials of polymers and ceramics with unusual properties, and even artificial high-temperature superconductors with monomolecular layers of alkaline earth atoms (calcium, strontium, or barium) alternating with copper dioxide (CuO2) layers.
These techniques allow the tailoring of materials and devices at the nanostructure level,1 i.e., accurate growth and placement of clusters of a few or a few
tens of atoms down to the positioning of single atoms. They will provide completely new sensor materials and the quantum wires, dots, and single-electron transistor devices that are likely to be exploited to continue the long-term growth trends in solid-state electronics into the future for decades to come. It seems clear that sensors and sensor systems of all kinds will benefit from these capabilities, getting continuously smaller and cheaper and more capable with time. The implementation of microscale or perhaps even nanoscale self-contained entities with integrated sensors, computers, and actuators will certainly become possible over the next several decades, and such devices will probably represent a mature, widespread technology by 2035.
Digital Implementations
Another very obvious characteristic of modern electronic technology is the inexorable march toward all-digital implementations. The significant advantages of digital versus analog implementation in terms of flexibility of processing, error containment, and robustness against drift have long been recognized, but cost, speed, and other obstacles have hindered the conversion in many areas. With the performance and costs of digital computers and signal processors improving exponentially with time, i.e., by factors of 5 to 10 every few years, the obstacles are vanishing and the digital implementation of all sensors and sensor systems in the near future appears inevitable.
Analog-to-digital conversion (ADC) technology and its converse (DAC) are currently making such rapid strides in sample rate, number of bits, size, and power, that systems that involve the direct digitization of microwave radar and communication signals at gigahertz rates, with adequate dynamic range and low enough size, power, and costs to be considered practical, are already under development in many places, with field deployments expected in less than 5 years. These kinds of ADC/DAC capabilities, combined with accelerating computational capabilities, will permit the implementation of advanced adaptive processing algorithms, e.g., digital beamforming and space-time adaptive processing (STAP), and effective ATR algorithms, as well as the exploitation of multisensor data fusion techniques. Given the ability to digitize and digitally process almost any radar waveform, it is clear that the time is ripe for the application of digital techniques to other aspects of the system, such as the generation of arbitrarily complex radar transmission waveforms with performance features that go well beyond the simple continuous wave (CW), linear frequency modulation (FM), and occasional phase-coded waveforms that have dominated radar technology to date.
Distributed Systems
As individual sensor and computing elements grow ever smaller in size, power, and cost and simultaneously more powerful, the temptation to combine a
large number of them into a super complex of distributed, intercommunicating elements becomes irresistible. The trend today is toward distributed phased-array antennas for radar and communications, multiprocessor supercomputer architectures, distributed power conditioning, the Internet, and so on. And there are enormous advantages to be gained—more information-bearing signals can be collected, more overall computer throughput can be achieved (but always by a factor less than number of elementary processors combined), and much higher overall reliability with graceful degradation characteristics can be obtained. Since it is always possible to make things complicated faster than it is possible to improve the reliability of the individual elements, fault-tolerant redundancy techniques must be explicitly addressed for graceful fail-safe degradation. Equally obvious is the need for efficient, high-bandwidth interelement communications, probably fiber optic and wireless, in which data compression techniques, both lossless and lossy, will come into play.
Moreover, as the Internet has shown, information collected from many, perhaps widely dispersed sources, with the proper communications technology and protocols in place, can be profitably correlated to allow a fuller understanding of a subject or situation. Data-fusion and data-compression algorithms will play a key role in the application of these concepts to sensing and to the achievement of the desired battlefield situational awareness, ATR, damage assessment, and related capabilities. An obvious danger lies in the potential flood of data that a capable multisensor distributed data collection system can create. It is possible to generate overwhelming amounts of data that can cause a total shutdown of the human users, whose performance is notoriously nonlinear and prone to catastrophic collapse. (Degradation is definitely not graceful for overloaded humans.) Concepts and algorithms to permit the recognition, extraction, and viewing of only the minimally required information from large distributed databases must be developed—an area of significant future need for research and development.
Eventually powerful miniature sensors will be combined in a single package with on-board, integral computational capabilities to form mini-systems-on-a-chip. An intriguing prospect for the future is the notion of interacting armies of small, capable, autonomous entities—microrobots that fly or crawl or swim—that combine miniature sensor packages with integrated computers, actuators, power sources, and wireless communication capabilities. These assemblies might be capable of functioning as ant societies do, with each participant acting locally on the basis of mostly local information, and the whole assembly functioning effectively to reach some global goal. This kind of implementation of sensors suggests the possibilities of higher overall performance in surveillance, for example, through adaptive, autonomous spatial repositioning of the individual sensors. The development of single, small, flying sensors of this sort is already under way. Successful artificial societies of this type will require the development of a deep understanding of what the appropriate rules of behavior should be and their implementation in software—another topic for future R&D efforts.
Multidimensional Sources of Information
Yet another striking trend in modern sensor system technology is the use of multiple simultaneous sources of information—e.g., spatially dispersed multiple sensors of the same type or perhaps single-sensor systems operating on multiple spectral bands such as several IR bands, several RF bands, one IR and one RF band, and so on. Dual-band IR focal plane arrays with precise pixel alignment between the band images have been produced, and several RF/IR advanced missile seekers (i.e., multispectral seekers) and optical sensors for satellite platforms that collect pixel-aligned data in hundreds of small (e.g., 10 Å) bandwidths across a large range of the optical spectrum—known as hyperspectral systems—are under development at the present time.
The higher the dimension of the information that can be collected from a pixel or an object, the better the chance of correctly detecting and recognizing it. Clearly, effective data fusion and ATR techniques are needed, and these are already areas of active research. On the other hand, significant increases in computational memory and throughput are required and offer additional challenges on the path to achieving high performance and affordability.
Multifunctional Configurations
The final technology trend of significance to the future growth of advanced sensors and sensor systems is the broad and growing interest in the implementation of multifunctional configurations—that is, sensors capable of performing several different functions via shared hardware. It has long been common to combine the search-and-track function on a single radar by using time-sharing of different waveforms and beam scan patterns, thereby gaining certain implementation advantages in size and perhaps cost over the alternative of building a separate radar for each function. For a number of reasons associated with the available real estate and the growing interest in and need for electromagnetic signature control, there is considerable interest in the Navy in providing multifunction capability in single locations.
It is always easy, in principle at least, to share computer resources between multiple functions. What is often more difficult is to share the interface with the external world and the microwave elements between functions, because many of these functions put quite conflicting requirements on these components and, as was mentioned in the introduction to this chapter, the properties of this interface are strongly constrained by the physics of the propagating phenomena, whether electromagnetic or acoustic. For example, radars can utilize time sequencing of the transmit and receive functions to achieve the isolation needed to prevent the high-power transmitted energy from leaking into the sensitive receivers and saturating or destroying them, but microwave communication systems typically require continuous simultaneous transmit and receive and cannot use the time-sequencing
approach. Electronic support measures (ESMs) systems, which might also utilize the same or adjacent portions of the microwave spectrum as do the radars and communications, have similar requirements for continuous, sensitive, passive reception and again cannot easily exploit time sequencing.
In addition, if radars of quite different frequencies (say, L- and X- or Ku band) attempt to share the same aperture (such as phased-array elements), extreme linearity and difficult-to-implement high-Q microwave filters in the amplifying electronics and wideband radiating elements are required to prevent deleterious cross-coupling of signals between bands, even if time sequencing can be used to implement transmission/reception isolation. Even more difficult is the problem of combining such widely separated frequencies as conventional RF microwave bands with millimeter waves or either of those with electro-optical systems. The physical implementations suitable for each of these spectral regions differ so much that it is next to impossible to usefully share transmit and receive resources. The amplifiers and filters suitable for one region simply do not work for the others, and often, rather than being able to share resources (particularly at the critical, constrained interface with the outside world), the different implementations conflict. There is always room for ingenuity here, but many of the obstacles are fundamental.
Critical Common Technologies
The discussion above of the generic sensor model identifies five key technologies as common to all modern sensors and sensor systems and as absolutely critical to their performance potential. Understanding the current state of the art of these individual technical areas and the growth patterns that can be extrapolated will allow reasonably confident prediction of the kinds of performance achievable in the future for the different classes of sensors and the kinds of new naval force applications that might be enabled.
Below, each of the critical technologies (Box 4.4) underlying advanced sensors in general is discussed briefly, and historical growth curves are presented where possible. Each technology is extremely important, in its own right, for
|
BOX 4.4 Critical Common Technologies Semiconductor Superconductor Digital Computer Algorithm |
many applications beyond sensors, and each is discussed also in Chapter 2 of this report.
Semiconductor Technology
Conventional Semiconductors
Semiconductors constitute an enormous topic2 that can be surveyed here only briefly, however critical it is to the future development of sensor technology. Since the invention of the transistor some 40 or more years ago, 3 single-component and at least 10 binary semiconductor materials, as well as a number of tertiary materials (e.g., mercury cadmium telluride [HgCdTe] and aluminum gallium arsenide [AlGaAs]), have been exploited for the implementation of a variety of electronic devices and applications. These single and binary semiconductors, ordered by the magnitude of their bandgap, are listed in Table 4.1. Others not listed here may someday be exploited, including mercury telluride (HgTe), manganese selenide (MnSe), gallium antimonide (GaSb), indium nitride (InN), scandium nitride (ScN), aluminum nitride (AlN), zinc selenide (ZnSe), and boron nitride (BN). Also indicated in Table 4.1 is the nature of the bandgap, that is, whether it is direct (D) or indirect (I) gap material, as this determines to a large extent just what kinds of applications the semiconductor may be suited for.
First to be exploited, germanium was soon replaced by silicon, clearly the most widely used semiconductor material so far and likely to remain so for the foreseeable future. The reasons for silicon's dominant position are numerous: It is readily available in large quantity; it is mechanically strong; it is a good thermal conductor; it can be easily grown into large-diameter, ultrapure, defect-free crystals; it forms stable insulating oxides of excellent quality; and it is nontoxic and easily fabricated, via a wide range of patterning, etching, implanting, and diffusing techniques, into devices with literally millions of circuits per chip and hundreds to thousands of chips per wafer with high yields.
These virtues, and an enormous multidecade investment in time and resources, have led to the explosive proliferation of digital and microelectronics fabrication technologies that characterize and enable the rapid growth in computer and information technology. Linewidths continue to decrease exponentially with time, with optical lithography still performing effectively at submicron dimensions that were thought to be beyond its capability only a few years ago, and with finer, although less convenient, x-ray and electron-beam techniques waiting in the wings to continue the fabrication down into the regime of quantum dots and wires and ultimately to single electron logic structures—about as far as can be imagined today. With finer dimensional capabilities in hand, and as defect
TABLE 4.1 Common Semiconductor Materials
|
Material |
Bandgap (eV) |
Bandgap Type |
|
InSb |
0.230 |
Direct (D) |
|
InAs |
0.354 |
D |
|
Ge |
0.664 |
Indirect (I) |
|
Si |
1.124 |
I |
|
InP |
1.344 |
D |
|
GaAs |
1.424 |
D |
|
CdTe |
1.475 |
D |
|
AlAs |
2.153 |
I |
|
GaP |
2.272 |
I |
|
ZnTe |
2.394 |
D |
|
SiC |
2.416 |
I |
|
GaN |
3.503 |
D |
|
C |
5.5 |
I |
densities continue to be reduced, the number of circuits that can be placed on a single chip with reasonable yield grows exponentially with time, causing the cost per operation to spiral downward while performance, in terms of clock speeds and throughput, continues its exponential upward growth—a pattern of factor-of-10 improvements every 4 or 5 years, which has been consistent for at least a decade and a half and shows no signs of slowing as yet. Figure 4.2 illustrates the exponential growth in the total number of transistors on a single chip from 1970 to the present and also extends the average observed growth pattern to the end of this study's time frame, 2035. Since there are no obvious fundamental physical laws that limit the number of transistors achievable per chip, and given the almost 30 years of observed consistent exponential growth, extrapolation of the observed pattern into the future appears to be reasonable. There is little doubt that this prediction will be quite accurate for the near future, say, the next 5 years, but it is obviously far less certain for the distant future. The obstacles to further growth are generally practical rather than fundamental; e.g., because of material absorption, ultraviolet imaging systems are difficult to implement via conventional optical concepts, until the predicted fabrication linewidth dimensions reach interatomic dimensions near 2035, as is discussed below. With sufficient motivation these obstacles may be overcome and the extrapolated pattern may continue into the future much further than may be evident today.
For all its virtues, silicon is not a perfect semiconductor material for all applications. Its bandgap is rather small, limiting its performance at elevated temperatures. Its bandgap is indirect, which inhibits its use as a laser or light-emitting diode (LED) source and makes its ability to absorb, and hence detect, optical photons weak near the band edge energy; this does not mean that silicon
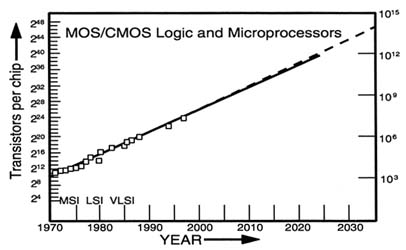
FIGURE 4.2 Historical trend in silicon technology (following Moore's Law). SOURCE: Data points from Yu, Albert, 1996, ''The Future of Microprocessors," IEEE Micro, 16(6):46–53, Figure 3, December.
cannot be used as an optical detector but rather that it requires a larger thickness than direct bandgap materials for the same detection effectiveness. Finally, the charge carrier mobility and saturation velocities are rather low for silicon compared with some of the other semiconductors, such as gallium arsenide (GaAs), indium phosphide (InP), silicon carbide (SiC), and carbon (C; diamond), seriously limiting the speeds at which silicon devices can operate.
A number of approaches have evolved to address these limitations, some of which are mature or close to maturity and others less so but which show great promise for the future. Other semiconductor systems offer different inherent physical parameter characteristics that can be exploited, as is discussed below, and alternate device configurations, difficult to implement in silicon, are possible in other technologies with a variety of specific advantages.
After silicon, GaAs is the next most mature semiconductor device technology. GaAs transistors enjoy distinct advantages with respect to speed and power over silicon transistors, because of the shape of GaAs's electron velocity versus electric-field curve—an inherent property of any semiconductor material determined by the specifics of its crystal structure and the resulting band structure. The peak electron velocity in GaAs is several times greater than that in silicon and is reached at a much lower value of electric field.
GaAs field effect transistors (FETs) are capable of operation at clock rates as
high as 5+ GHz in digital circuits and as analog amplifiers with significant power and gain in the microwave range up to 30+ GHz. High-performance analog-to-digital converters capable of 6 to 8 bits at sample rates of 2 to 3 × 109 per second have recently been implemented in GaAs heterojunction bipolar transistor technology. And for the past decade or so, solid-state microwave developments have been dominated by monolithic microwave integrated circuit (MMIC) technology—based almost exclusively on GaAs.
In addition to its electron mobility-related advantages, GaAs offers a direct bandgap, making it suitable for optical applications as a detector or as a light source, such as an LED or a laser, thereby easing the interface between its microwave and high-speed digital capabilities and the fiber-optical communication links that will be utilized for the transfer of data from some sensors to their associated computational resources. The direct bandgap also helps in that it produces short minority-carrier lifetimes such that undesired electron-hole pairs recombine so rapidly that parasitic effects may be safely ignored in the design of devices leading to simpler structures.
Of course, GaAs, for all its performance advantages, is a much more difficult material system to work with than silicon. Its hole mobility is low, and there is no natural insulating oxide, so that it is not practical to implement the CMOS structures that offer such low-power performance advantages in silicon. Its dielectric constant is almost twice as large as that of silicon, giving it a higher capacitance for the same-area device. Finally, its low thermal conductivity requires very thin substrate thickness for device thermal control, which, when combined with its extreme brittleness, leads to significant fabrication yield losses through handling. Further yield problems are inherent in the fact that as a more complex system than silicon, it is much more difficult to prepare large-diameter, defect-free GaAs substrates.
Bandgap and Heterojunction Engineering
Two of the most significant concepts to emerge from the efforts expended over the past several decades on the development and maturation of GaAs semiconductor device technology are bandgap engineering and heterojunction engineering, both reflections of our increasing abilities to manipulate materials and structures at the fundamental atomic level. The GaAs high-electron mobility transistor incorporates both of these concepts. The bandgap of complex multi-component materials, such as AlGaAs, varies continuously as the proportions of components are changed. In this way it is possible to tune or engineer the material's bandgap to optimize transistor performance or, if the device is an LED or a laser diode, to control the specific wavelength emitted. Through the use of molecular beam epitaxy, metal-organic chemical vapor-phase deposition, and combinations thereof, very thin layers of high-quality, defect-free, properly tuned AlGaAs can be fabricated with electron mobility as much as three orders of
magnitude larger than can be achieved in silicon and, when grown on ordinary GaAs, produce beneficial heterojunctions at the interface because of the different bandgaps of the two materials. The resulting heterojunction devices show significantly higher switching speeds as digital circuits and improved power and efficiency performance at high microwave and millimeter-wave frequencies than the more straightforward metal-semiconductor field-effect transistor (MESFET) implementations.
These concepts apply broadly to other material systems, and, in fact, their application to silicon through the bandgap and heterojunction engineering of silicon germanide3 (SiGe) has produced devices that perform as well as or better than GaAs devices but retain much of the simplicity and ease of manufacturing aspects of pure silicon technology. Indicative of the continuously accelerating growth of technology today, SiGe has moved from a laboratory curiosity less than a decade ago to a commercial reality today. SiGe transistors have already demonstrated cutoff frequencies in excess of 100 GHz, which is better than the best silicon transistors by more than a factor of two and in the same ball park as GaAs and InP technologies. SiGe is an exciting and promising technology and could someday displace GaAs completely.
Next of interest in the III-V family for electronics and MMIC applications is InP. Although behind GaAs in development, InP exhibits even higher electron mobility characteristics than GaAs and also has a direct bandgap that is somewhat smaller than that of GaAs, but just right to permit bandgap engineering of LEDs and laser diodes in the two wavelength bands of most interest to long-distance fiber-optic communication applications (i.e., 1.3 µm for minimum dispersion and 1.55 µm for minimum loss). High-electron-mobility transistor (HEMT) or pseudomorphic HEMT (PHEMT) devices for millimeter-wave applications have shown higher power and efficiency than similar GaAs implementations and are very promising. Unfortunately, InP has many of the same negative features as GaAs technology and currently lags it in overall maturity.
Wide-bandgap Semiconductors
Even more interesting, and still further behind in maturity, are the so-called wide-bandgap semiconductors (WBSs). Although this term is often not used precisely, it generally includes the IV and IV-IV materials and the III-V nitride compounds.4 The most promising of these are SiC, gallium nitride (GaN), and carbon (diamond), all with bandgaps above 2.4 eV. Because these materials have
such large bandgaps and much higher thermal conductivity and dielectric breakdown strengths than silicon, GaAs, or InP, they offer promising high-temperature and high-power performance. With low-dielectric constants and high-electron mobility, the prospects for millimeter-wave capabilities are excellent. And as these materials are much harder and stronger than conventional semiconductors, they offer the potential for higher processing yields and lower manufacturing costs. In addition, SiC, GaN, and diamond all offer the potential for blue, green, and ultraviolet light emission and have been proposed for application as LEDs and radiation detectors (visible and ultraviolet) as well as for power and microwave devices (bipolar, MESFET, and IMPATT), thermistor sensors, and high-speed switching devices.
Although SiC was one of the first semiconductors recognized (electroluminescence was reported in 1907), and the electronic properties of diamond were first investigated in the 1930s, most of the progress in WBS technology has come in the last decade, and formidable fabrication obstacles remain. Detailed predictions of SiC and C (diamond)5 microwave devices have been made by means of basic measured material parameters and device models that correctly predict observed GaAs device performance. Figure 4.3 illustrates predicted performance for SiC and diamond MESFETs compared with measured performances of equivalent GaAs and silicon devices. The GaAs results represent the state of the art for GaAs MESFETs. The predicted performance of SiC and diamond MESFETs is significantly better than that for GaAs, suggesting that at 100 GHz, about 300 mW and 1 W of RF power is possible from SiC and diamond devices, respectively. At lower frequencies, in the more traditional microwave bands, significant power performance is anticipated, i.e., from CW power amplifiers with tens of kilowatts at L-band and below, to 1 kW at S-band, several hundred watts at X-band, and several tens of watts at 35 GHz (Ka band).
The obstacles that remain are related to achieving high-quality, uniform films with controllable properties. The technology for producing single-crystal films of diamond with understanding and control of nucleation, growth, the methods of impurity introduction and activation, and the formation of ohmic contacts with good adhesion is still at an embryonic stage and must be mastered before diamond electronics can become a reality. SiC and GaN materials and fabrication technologies are in better shape and, although GaN is still in a basic research phase, a host of practical devices have already been implemented in SiC. There is little question that, via WBS, high-power, high-temperature, robust semiconductor electronics with interesting potential for short-wavelength optical applications will become available in the next several decades. The growth of microwave
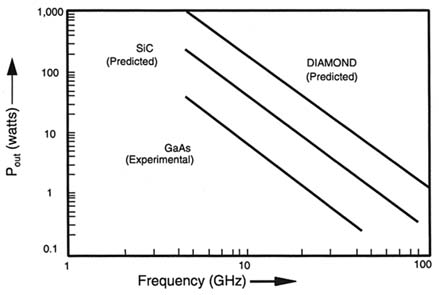
FIGURE 4.3 RF power performance vs. frequency for diamond, SiC, and GaAs MESFETs. SOURCE: Adapted from Trew, Robert J., Jing-Bang Yan, and Philip M. Mock, 1995, "The Potential of Diamond and SiC Electronic Devices for Microwave and Millimeter Wave Power Applications, " Proceedings of the IEEE, 79(5):598–620, Figure 15.
wave power generation over the past decade and a half is illustrated in Figure 4.4, showing the increase in X-band amplifier power performance.
Extrapolation of these curves into the future and adding the levels of power capability predicted for SiC and diamond suggest that SiC may represent the state of the art by about 2005 and that diamond needs to be fully mature by 2010 to 2015 to be the state of the art at that time. Further progress may simply involve multiple MESFET amplifier chains on a single substrate. With SiC and diamond, it should be possible to maintain the exponential trend out to 2020 and beyond. Of course, the real art at that time may come from technologies not envisioned today—the details are rarely predictable, but it is highly probable that the envelope will persist.
Higher Levels of Integration
Digital Circuits
Semiconductor transistors, particularly those designed for high frequencies, are by nature quite small—the active dimensions of single transistors, whatever their design, are limited by fundamental physical properties of the materials, e.g.,
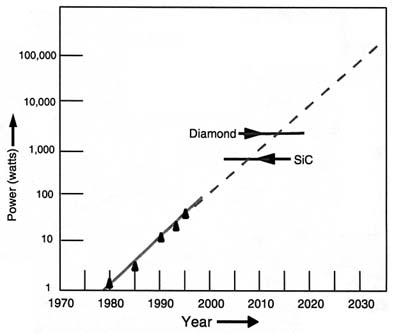
FIGURE 4.4 X-band power amplifier output. SOURCE: Adapted from the U.S. Air Force Scientific Advisory Board, 1995, New World Vistas, Air and Space Power for the 21st Century, Sensors Volume, U.S. Air Force, Washington, D.C., Figure 6-6, p. 102 and data shown in Figure 4.3 of this report.
electron and hole mobility, to dimensions typically measured in microns to tens of microns. Combining this feature with the fact that the fabrication techniques employed can frequently be applied uniformly over wafers of many inches in diameter leads to the possibility of fabricating large numbers of transistors on the same small substrate at the same time. In the digital world, this rather obvious extension from single devices to integrated circuits (ICs) took some time to evolve. The first key was to understand how to interconnect the active devices with useful passive components, equally small, that could be fabricated by the same photolithographic, deposition, diffusion, and etching techniques that produced the transistors. The second was to control the fabrication imperfections so that economical production yields of fully functional integrated circuits could be obtained. The final challenge lay in the ability to design and simulate accurately, through software and CAD tools, complex circuits with hundreds to thousands to millions of devices. This improved design and simulation capability was very much a bootstrap operation, as each generation of computer chip enabled the more powerful software tools needed to implement the next generation.
For silicon digital ICs, these endeavors have been quite successful, as is well
illustrated by the silicon-technology growth curve (see Figure 4.2) presented earlier. For other semiconductor systems, particularly those with multiple components, although the fabrications techniques are similar to those used for silicon, the systems are generally more difficult to control, and so the maturity of these technologies is significantly behind that of digital silicon. For example, the closest contender, digital GaAs, which has many performance advantages over silicon in speed, in particular, is characterized today by only tens of thousands of gates per IC capability, whereas state-of-the-art silicon technology can produce several million transistors per chip circuit with economical yields. No doubt, some time in the future, when silicon technology's capabilities are saturated—even with quantum devices and single-electron transistors this will happen—other semiconductor systems, such as GaAs, SiGe, and SiC, will catch up and continue the overall digital technology growth envelope illustrated above.
Analog Circuits
Although the same arguments for a high level of integration implementation apply to microwave and optical analog circuits, the obstacles have proven to be different in detail and much more difficult. Although microwave transistors, optical detectors and emitters, and various passive components, including solid-state strip line and waveguide transmission line structures with low loss and good impedance control, can be made by the same microelectronics manufacturing techniques as used for digital electronics, these high-frequency applications cannot approach the level of integration that characterizes digital devices. Not only do these high-frequency applications demand more precise control over dimensions, impedance, and losses, but also the passive components required are physically much larger than those used by the digital implementations. For although integrated, both microwaves and light must propagate finite distances before useful operations can be performed on them by passive structures, e.g., RF inductors and Mach-Zender modulators. Combined with the more difficult multicomponent semiconductor systems, such as GaAs, InP, AlGaAs/GaAs, and lnGaAsP/InP, which characterize these applications, the result is that microwave and photonic chips are inevitably limited to device-per-chip densities that are a small fraction of what can be implemented in modern digital silicon technology, i.e., tens to hundreds of components per IC rather than the thousands to millions that characterize today's digital chips.
In spite of this unpleasant obstacle, the microwave and optical ICs are as capable and far smaller and lighter than their conventional equivalents that use discrete components and free-space propagation and, because of the monolithic processing used, offer many cost and reliability advantages. This combination of advantages has already opened up new application areas, the enabling of phased arrays by MMIC technology being a good example. Without doubt, the trend toward smaller size and more capability per analog chip will continue into the future.
Microwave Components
During the past several decades, great progress has been made in applying HF semiconductor technology to the generation of MMIC for a wide variety of useful radar and communication applications—active antenna phased arrays, in particular. MMICs are integrated circuits containing multiple active devices as well as integral passive components such as diodes, resistors, capacitors, inductors, and low-loss controlled-impedance transmission lines, and they perform useful microwave functions such as low-noise amplification (LNA), power amplification (PA), phase shifting, and attenuation. It would be desirable, from a manufacturing cost and perhaps a performance point of view, to be able to fabricate multiple functions on a single MMIC chip—such as a complete transmit/receive module with oscillators, filters, mixers, PA, LNA, circulators, and the like. For many reasons, this is not practical today, and so current practice combines limited-function MMIC chips in a hybrid package, very much like a digital multichip module (MCM), which implies costly, difficult to automate, and often unreliable discrete interconnections from chip to substrate to chip.
The application of MMIC technology to phased-array radar and communications is limited by the cost of individual transmitter, receiver, or transmitter/receiver (T/R) modules. Current efforts are devoted largely to reducing phased-array element costs, i.e., the costs of the T/R MMIC plus the support structure, cooling, radiating elements, and such. To make phased-array radar and communications applications affordable, these costs must be reduced by one or two orders of magnitude. Currently, the total antenna cost divided by the number of phased-array elements ranges in the thousands of dollars. The best approach to affordability would seem to lie in mastering the implementation of single-chip MMIC modules so that low-cost, automated microelectronic manufacturing practices can be applied. This should occur as the technology continues to evolve.
For microwave applications, achieving the highest level of complexity and power-generating capability in the smallest volume possible is not always desirable or necessary. Once a phased-array element can be made small enough to fit the element separation constraints and still give the required performance, it makes little sense to try to reduce its size further if there are no accompanying significant benefits in power, weight, or cost. On the other hand, it may make sense to add additional functional capabilities to enable multifunctional performance (i.e., different functions from the same physical aperture), but this suggests only modest increases in complexity, that is, by the number of separate functionalities needed.
From another point of view, as is discussed below, digital techniques will inevitably move as close to the external interface (antenna) as possible, suggesting the possibility of combined microwave-digital chips of great complexity but with the complexity largely confined to the digital portions. Such hybrids have already been implemented, i.e., MMIC chips with integral GaAs digital control
logic on board, although the fabrication of analog and digital transistors differs in details, e.g., impurity profiles, that are often incompatible. Appropriate compromises and techniques will be found, and progress will continue in this direction.
Optical Components
Detectors—Focal Plane Arrays
Semiconductors form natural optical detectors, because incident photons whose energy exceeds the bandgap (h![]() > EBG) readily kick electrons from the valence band up into the conduction band, giving rise to measurable electrical responses. The wavelength corresponding to the bandgap is known as the cutoff wavelength (
> EBG) readily kick electrons from the valence band up into the conduction band, giving rise to measurable electrical responses. The wavelength corresponding to the bandgap is known as the cutoff wavelength (![]() cutoff), as all radiation with wavelengths less than the bandgap wavelength will have enough energy to generate a response and wavelengths that are longer produce no response at all. To reduce the effects of thermal noise inevitably present in any semiconductor electronic circuit, the temperature of the detector (TD) must be kept low enough so that KTD is well below the photon energy h
cutoff), as all radiation with wavelengths less than the bandgap wavelength will have enough energy to generate a response and wavelengths that are longer produce no response at all. To reduce the effects of thermal noise inevitably present in any semiconductor electronic circuit, the temperature of the detector (TD) must be kept low enough so that KTD is well below the photon energy h![]() cutoff. In practice, this reduces the necessity to satisfy the approximate relationship, TD ·
cutoff. In practice, this reduces the necessity to satisfy the approximate relationship, TD · ![]() cutoff ˜ 550 K µm. Thus detectors for the 3- to 5-µm IR spectral region must be cooled to about 110 K, which, in practice, implies liquid nitrogen at 77 K. For longer IR wavelengths, say out to 20 µm, 30 K is required, which demands cryo-engine cooler technology. For semiconductor optical detectors, thermal control can be quite a limiting and expensive inconvenience. Fortunately, for the near-IR (< 1.8 µm), visible, and UV regions, optimal room temperature operation is feasible.
cutoff ˜ 550 K µm. Thus detectors for the 3- to 5-µm IR spectral region must be cooled to about 110 K, which, in practice, implies liquid nitrogen at 77 K. For longer IR wavelengths, say out to 20 µm, 30 K is required, which demands cryo-engine cooler technology. For semiconductor optical detectors, thermal control can be quite a limiting and expensive inconvenience. Fortunately, for the near-IR (< 1.8 µm), visible, and UV regions, optimal room temperature operation is feasible.
Unfortunately, even with appropriate cooling, there is no single, ideal, detector material that gives optimal performance for all IR, optical, and UV spectral bands of interest to sensing. And so, over the years, many different semiconductor detector systems—e.g., various forms of silicon and germanium with different doping for different spectral regions, lead sulfide (PbS), lead selenide (PbSe), indium antimonide (InSb), platinum silicide (PtSi), various compositions of HgCdTe for different spectral regions, and so on—have been employed. Each system requires its own fabrication techniques and today exhibits varying levels of maturity, depending on the specific system. It is no surprise to find that the visible and near-IR regions are currently the most mature as they are typically implemented in silicon.
Although single optical detectors find use in some nonimaging situations, the application of most interest is imaging. The earliest imaging systems employed single detectors in scanning configurations, but with the development of silicon microelectronic IC technology, visible focal plane arrays (FPAs) with multiple silicon detectors in oneand two-dimensional configurations were rapidly developed during the early 1980s. By means of traditional optics, an image is projected on the focal plane where the detector elements respond in parallel, accumulating
charges proportional to the image irradiance levels at each detector position. The signals are then read out very rapidly, serially or simultaneously, into some form of readout electronics, for display or storage. The detector elements are then reset and the cycle repeated, typically at video frame rates of 30 Hz or higher. Conveniently, the readout circuitry, often a CCD configuration, could also be implemented in silicon and integrated directly on the FPA itself to form an all-solid-state monolithic imaging detector. These, of course, form the basis for the high-quality and inexpensive video camcorders so widely available today. Sensors that operate in the visible region with millions of picture elements (pixels), e.g., 2,000 x 2,000, are in production now, and formats with several tens of millions of pixels, e.g., 5,000 x 5,000, will soon be possible.
Applying these same FPA concepts to the semiconductor materials needed for optimal performance in the longer IR bands, such as InSb, PtSi, or HgCdTe, is possible but is far less straightforward. Generally, in these technologies, implementing the readout circuitry on the same substrate with the detector elements in a monolithic form is not practical, and so the detector array must be interfaced to an external silicon very large scale integrated (VLSI) circuit chip. In addition, as is the case for digital circuits, it is much more difficult to economically produce large-area structures in these more exotic systems. And so, medium-wavelength IR (MWIR), i.e., 3 to 5 µm, and long-wavelength IR (LWIR), i.e., 8 to 14 µm, FPAs lag the visible somewhat, with MWIR FPAs of 1,024 x 1,024 elements in InSb and HgCdTe and LWIR FPAs of 256 x 256 elements in HgCdTe and extrinsic silicon representative of the current state of the art.
Optoelectronics
Semiconductor optical capabilities are by no means limited to the detection of light but also can be readily configured to generate light at the bandgap energy—that is, at ![]() cutoff, as LEDs or as laser diodes. With the advanced fabrication techniques, such as molecular beam epitaxy (MBE), metallo-organic chemical vapor deposition (MOCVD), ion beam implantation, and micromachining, miniature high-quality optical waveguides, mirrors, and lenses can be manufactured. Several decades ago these possibilities gave rise to the concept of integrated optics, that is, optical systems that could be implemented in a miniature, monolithic, solid-state form. Although significantly smaller than the conventional free-space optical alternatives, integrated optics implementations are never as small as digital ICs, as the name suggests, because of the necessity of using finite amounts of optical propagation distance to achieve useful amounts of modulation, mixing, diffraction, and so on. The dimensions of integrated optical elements are commonly measured in millimeters or centimeters, rather than in microns, as is the case for digital ICs.
cutoff, as LEDs or as laser diodes. With the advanced fabrication techniques, such as molecular beam epitaxy (MBE), metallo-organic chemical vapor deposition (MOCVD), ion beam implantation, and micromachining, miniature high-quality optical waveguides, mirrors, and lenses can be manufactured. Several decades ago these possibilities gave rise to the concept of integrated optics, that is, optical systems that could be implemented in a miniature, monolithic, solid-state form. Although significantly smaller than the conventional free-space optical alternatives, integrated optics implementations are never as small as digital ICs, as the name suggests, because of the necessity of using finite amounts of optical propagation distance to achieve useful amounts of modulation, mixing, diffraction, and so on. The dimensions of integrated optical elements are commonly measured in millimeters or centimeters, rather than in microns, as is the case for digital ICs.
As very thin layer, multiple quantum welt (MQW) two-dimensional electron gas and tunable bandgap engineering concepts evolved for the optimization of
single transistor performance, these concepts were quickly applied to the generation of efficient LED and laser diode structures for many different spectral regions. The simple discrete laser diodes of the 1960s, with optical feedback provided by polished or cleaved reflective facets at the ends of the active p-n junction region, gave way to sophisticated MQW multilayered structures with gradient index and multilayer distributed feedback (DFB) confinement built in. To meet the needs of long-distance fiber-optic digital communications—the most successful application of optics to electronics so far—CW room-temperature semiconductor lasers, i.e., InGaAsP/lnP MQW devices, capable of direct current modulation with bandwidths of tens of gigahertz and with outputs approaching 1 W or so, have been developed for both the 1.3-µm (minimum dispersion) and the 1.55-µm (minimum attenuation) spectral regions of silica fibers.6 Adding strained layer concepts promises to further improve the power, efficiency, and lasing thresholds of MQW lasers in the future. Because of the growing fiber-optics communication business, commercial sources for 1.3-µm and the 1.55-µm lasers abound.
In addition to long-distance fiber-optic digital-communications applications, there is increasing interest in the possibility of using optics to transfer analog microwave signals within phased-array radars to supply time-delay steering, as well as to distribute the high-data-rate, large volumes of digital data associated with modern digital receiver radar concepts. For these applications, the earlier-developed and simpler AlGaAs/GaAs MQW lasers, which operate in the 0.8-µm spectral region, are ideal, as the increased fiber attenuation and dispersion in this spectral band are of no consequence for the minuscule distances (a few to a few tens of meters) typical of a radar, and the commonality with the GaAs MMIC technology suggests the possibility of fully integrated, monolithic optical-microwave implementations. Interest in these applications should grow in the near future, although the technology of AlGaAs/GaAs MQW lasers has languished up to now in view of its inapplicability to long-haul communications, and there are no commercial sources for these lasers currently available.
The possibilities of combining optical and electronic functions on the same chip bring us finally to the broader subjects of optoelectronics7 and the optoelectronic integrated circuit (OEIC). The formidable manufacturing technology that has evolved to support digital and microwave microelectronics has enabled optical, electro-optic, and electronic components to be implemented together in monolithic semiconductor form, combining the advantages of each normally disparate element in a single device—the OEIC. Implementing drive electronics on the
same chip with a laser diode makes an attractive cheaper, faster, smaller fiber-optic transmitter for communication applications and was one of the first OEICs developed. Equally important are the fiber-optic receivers, and it is natural to combine detectors with transimpedance low-noise amplifiers as an OEIC. For long-distance communications, this implies InP digital/analog electronics, whereas for photonic radar applications, GaAs technology is suitable. OEIC chips in GaAs, combining high-bandwidth optical detectors with both matched digital electronics and MMIC amplifiers suitable for extracting digital and microwave information transmitted simultaneously on a single optical carrier, have already been demonstrated in the laboratory. Interest in this technology for the implementation of photonic radars with exceptional properties is running high at the present moment, but formidable practical obstacles still remain, and no photonic-based radar has yet been fielded.
Although the success of the application of optoelectronics to microwave systems is uncertain, there is an area of application that is just building momentum but that seems destined to succeed in the end—free-space photonics for broadband interconnects, e.g., chip to chip or board to board, internal to computers. Progress in computer technology will be of great interest to future sensor systems. Analysis suggests that, for distances of more than about a millimeter and data rates of more than 100 Mbps, less power is required on the chip for photonic interconnects than for electronics. Recent progress with very-low-threshold lasers suggests that the break-even distance may soon be only fractions of a millimeter.
Finally, it has been suggested that optoelectronics8 in the form of various device technologies, such as AT&T's self-electro-optic effect device (SEED), offers the potential for logic implementations that operate at the speed of light and that may someday replace the existing VLSI circuit technology on which the digital information revolution is now based. Although the ability of such optical devices to perform logic has been demonstrated, only very simple functions were implemented, i.e., a few gates. Intriguing as this seems, there are good reasons to believe that conventional digital logic cannot be matched by optical logic, the speed of light notwithstanding. The primary problem is that it takes a good deal of effort to generate, modulate, and detect light—which is always done by moving electrons first, as light does not interact strongly with anything else—and this investment must therefore return significant benefits to be worthwhile. For the communication of wideband information over macroscopic distances, whether these be millimeters or miles, the investment is advantageous and optical communications is the preferred path of the future. For implementing logic, however, particularly in view of the shrinking dimensions of digital circuit elements and with the possibility of single-electron transistors on the horizon, optical logic
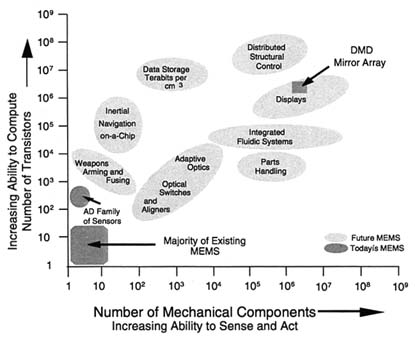
FIGURE 4.5 MEMS technology roadmap. SOURCE: Adapted from Gabriel, Kaigham J., 1996, "MEMS Technology Trend and Roadmap," in the briefing "Microelectrome-chanical Systems (MEMS)," to the Panel on Technology presented by DARPA, September 13.
seems to require the use of many more electrons for each logic operation than is, or will be, required for the digital alternative.
Microelectromechanical Systems
The final semiconductor topic of interest to the future of sensor technology is MEMS. MEMS technology is an imaginative, but logical, exploitation of microelectronics. Through the use of traditional silicon fabrication techniques, microelectronic circuits and miniature, movable mechanical components with dimensions measured in microns are combined on a single substrate to perform a wide range of sensing and actuation tasks (Figure 4.5). Drawing on the fabrication techniques and materials of microelectronics as a basis, MEMS processes are used to construct both mechanical and electrical components. Mechanical components in MEMS, such as transistors in microelectronic devices, can be fabricated with features that have micron or submicron dimensions, thus enabling the inclusion of millions of mechanical components on a single chip. From the mechanical point of view, silicon is ideal for this application because it is strong
and easily fabricated into ridges, valleys, free-standing bridges and cantilevers, cavities, nozzles, membranes, and other structures.
MEMS technology combines the advantages of miniaturization, multiple components, and large-scale integration. Because of the flexibility inherent in the integration of electrical and mechanical components, the potential applications of MEMS technology appear to be limitless. Examples of possible applications include miniature inertial sensing and guidance devices, miniature sensors of all types that can be widely dispersed or gathered into large arrays, and miniature actuators, including steerable mirrors for directed-energy weapons and smart skin structures for aerodynamic flow control. Other specific military uses include inertial guidance for munitions, integrated fluidic systems for biological and chemical analytical instruments and for hydraulic and pneumatic control, miniature DNA detection systems, integrated micro-optomechanical components for displays, IR detector arrays, fiber-optic switches, and vibration sensors for condition-based maintenance. Some commercial applications of MEMS technology are already available:
- Inertial sensors, for example, an accelerometer for an automobile air bag sensor—from Analog Devices;
- IR imaging, for example, an uncooled IR camera based on a MEMS microbolometer FPA—from Raytheon-Amber; and
- Projection displays, for example, a MEMS array where each pixel is controlled by a micromirror—from Texas Instruments.
Although MEMS technology is being actively developed for commercial applications, the defense community cannot rely on the commercial sector to address all of its development needs because MEMS devices are highly application specific.
Superconductor Technology
High-temperature Superconductors
Superconductor technology has shown tremendous potential for application to both ultralow-loss, high-Q microwave devices9 and to very-high-speed, very-low-power digital circuits—advances that could be incorporated into advanced sensors in the near future through the maturation of high-temperature superconductor (HTS) technology. HTS systems, such as YBaCuO,10 have superconductor
critical temperatures well above that of liquid nitrogen (77 K) and do not require the liquid helium (at 4 K) of the earlier classical systems. Because the superconductor phenomenon is a macroscopic manifestation of quantum mechanical behavior, its properties are often strikingly different from what classical physical intuition suggests. These significant differences in behavior permit the implementation of completely new devices—such as SQUIDs, which have found application in accurately sensing weak magnetic fields—as well as the offering of alternate implementations of familiar devices, e.g., microwave components and digital logic circuits,11,12 with completely different characteristics, often permitting very-low-power, very-high-speed performance that cannot be obtained in any other way. However, the obstacles to the realization of this potential have proven formidable and with a few exceptions, medical imaging being a noteworthy example, HTS systems have yet to find widespread, practical, commercial application. Contrary to the popular image, the low temperatures required, although sometimes stressing and awkward with the earlier systems, are much less problematic with HTS technology and the newer generations of cryocoolers than are the basic materials and large-scale fabrication issues that remain.
High-performance Microwave Devices
The best known characteristic of superconductivity—the direct current (dc) resistivity of the superconductor abruptly vanishing as the temperature is lowered below the critical temperature—suggests that very-high-Q, i.e., low-loss, superconductor implementations of microwave delay lines, resonators, and filters may be feasible. This is indeed true, although it not nearly as straightforward as might be thought. Microwave losses do not vanish below the critical temperature but do diminish rapidly with temperature and vary with frequency, with the losses diminishing toward the dc limit as the frequency is lowered. The combination of low surface resistance and a frequency-independent penetration depth allows the implementation of compact microwave designs with low insertion loss, large bandwidth, and low dispersion. In the past several years, practical thin-film HTS implementations of dielectric resonators with Qs exceeding 3 million and narrow, tunable high-Q microwave filters, operating at 77 K and capable of handling tens to hundreds of watts of power, have become available. Small-scale integration of receiver front ends and other microwave assemblies, with a few tens of superconductor and semiconductor components on a single wafer, also have been demonstrated but are not yet widely available. Such components, particularly the high-Q
tunable filters, are certain to play a role in systems that utilize digital receiver techniques with conversion at microwave frequencies.
High-performance Digital Circuits
The full realization of the quantum nature of superconductivity in the late 1950s and the discovery of the Josephson effect in the early 1960s led quickly to the exploitation of the quantized nature of the Josephson junction (JJ) response in the form of digital logic. What JJ technology offered for digital implementations was primarily intrinsic switching speed of only a few picoseconds and low signal voltages determined by the superconductor bandgap, i.e., about 3 mV for traditional low-temperature superconductors, which imply power dissipation per junction of less than 1 microwatt.
However, early attempts to develop superconductor computers at IBM were frustrated by material problems associated with temperature cycling failures and by the relatively low speed, i.e., a few gigahertz, latching concepts utilized. In 1985, Russian workers developed an alternative form of JJ logic, known as rapid single-flux quantum (RSFQ) logic,13 which is much faster, promising 100- to 300-GHz performance capabilities. Rather than switching between a superconducting and a nonsuperconducting state, which the earlier logic used, RSFQ switches superconducting currents between alternate paths, never passing out of the superconducting regime, thereby avoiding the finite transient times associated with the superconducting-to-nonsuperconducting transition. The general concept is familiar from the earlier days of emitter control logic (ECL) semiconductor logic, which utilized the same trick to achieve high-speed performance in exchange for the higher powers associated with never entering the current-off state.
Today, digital circuits and analog-to-digital converters of the RSFQ logic family are under investigation in several laboratories. RSFQ demonstration projects have been built with classical low-temperature materials (superconducting) and, with progress in HTS technology, certainly could be developed into practical special-purpose processors in the near future. A wide variety of ADC of both the Flash and Sigma-Delta14 architectures have been proposed and implemented to some extent. The first superconductor Sigma-Delta ADC was demonstrated last year, in a niobium-based (low-temperature) technology and obtained a respectable 78-dB spurious-free dynamic range bit over a signal bandwidth of
at least 5 MHz, through a single-loop modulator clocking at 45 GHz. Performance far better than this is projected for the future.
At present, the most difficult barriers to widespread digital application are the need to fully master the material properties of the HTS systems, which are complex, multicomponent ceramic materials, and the need to adapt the fabrication processes to larger scales of integration than have currently proven practical—a few hundred to a few thousand on a single chip—even in the better-behaved low-temperature niobium systems. Most device demonstrations to date have utilized the low-temperature systems, which remain awkward because of their requirement for more complex cryogenics and are thus less attractive than HTS.
Digital Device Technology
The growth of digital device technology is the single most important factor controlling the foreseeable future of sensor technology, whether it be to the year 2000 or to 2035. The advantages of a digital, rather than an analog, representation for signals or information are many and well known, including immunity from drift, containment of errors introduced by analog-to-digital (A/D) quantization and subsequent digital processing, simpler fabrication requirements (i.e., transistor linearity is not a serious issue), low-power physical implementations, and complete flexibility in defining and changing the processing algorithms, whether they are linear or nonlinear. The march toward a completely digital world has been inexorable over the past several decades. Although most evident today in such devices as the popular cellular telephones, high-definition television (HDTV), and personal computers, the digital revolution is by no means limited to these obvious applications, as is illustrated by the fact that our watches have long been digital, most medical thermometers are now digital, and automobiles, which all run far better and far more reliably than they did 20 years ago, contain multiple embedded digital computers. There is no doubt that all sensors will be digital in the near future—immediately converting the outside world's physics-induced electrical sensor responses to bits for further processing, storage, communication, and display.
Microelectronics
The fundamental characteristics of the growth of digital electronics are most robustly described in terms of integrated circuit fabrication and performance parameters, independent of the semiconductor material systems, the device designs, or the circuit architectures employed or expected to be employed at different time periods to achieve each level of performance. As discussed above, envelopes representing the best of expected technology performance at different times are more reliable as predictors than are attempts to describe what any individual technology option will achieve. This is particularly true for technologies
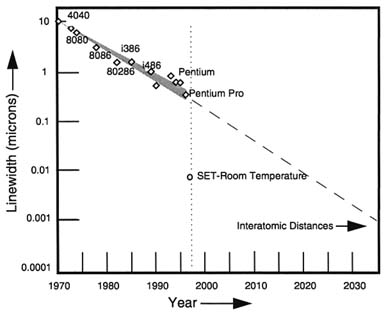
FIGURE 4.6 Microelectronic fabrication linewidth definition. SOURCE: Adapted from Yu, Albert, 1996, "The Future of Microprocessors, " IEEE Micro, 16(6):46–53, Figure 3, December.
that have been advancing exponentially for many decades, as is the case for digital technology. In the absence of contradictory evidence, the panel's best projection for the future is continued exponential advance, recognizing that the advance will likely be stepwise rather than continuous. There is no reason to project lower or higher rates of growth for the future, at least until some fundamental technological barrier can be identified.
Digital technology is best characterized by the minimum achievable fabrication linewidth, the maximum area of defect-free chip that can be economically produced, and the clock speed achievable. The historical growth of minimum manufacturable mask fabrication linewidth projected to 2035 is illustrated in Figure 4.6. In many ways, progress in achievable linewidth explains much of the growth in devices per chip and clock speed—reducing the linewidth definition permits smaller devices to be fabricated, thereby increasing the number of devices we can implement on the same size chip while also encouraging faster switching. Additional benefits accrue from lower voltages and lower power per transistor as the dimensions shrink.
To date, the reduction in minimum linewidth definition shown in Figure 4.6 has been accomplished largely through continuous improvements in optical lithography—an achievement that was totally unexpected 10 years ago and that
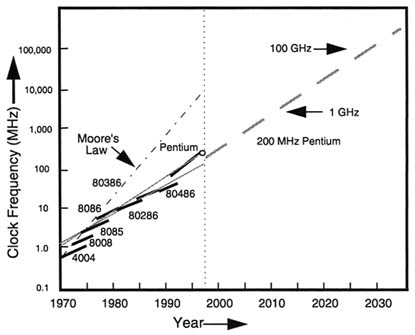
FIGURE 4.7 Clock frequencies of affordable microprocessors. SOURCE: Adapted from Hospodor, A.D., and A.S. Hoagland, 1993, "The Changing Nature of Disk Controllers," Proceedings of the IEEE, 81(4):586–594, Figure 10.
illustrates the difficulty of successfully projecting the growth of any specific technology. Although more expensive but finer-resolution x-ray and e-beam technologies have long waited in the wings, optical lithography has continued to maintain its dominance through shifts to shorter wavelengths and the introduction of subtle phase manipulation concepts.
Although data exist for the individual trends, the history of microprocessor clock speed, shown in Figure 4.7, provides an excellent summary of the overall growth of digital capabilities. A simultaneous measure of intrinsic switching speed as well as of the ability to manufacture useful complex circuits, microprocessor clock speed has been increasing at the rate of a factor of two every 2 years since the early 1980s. There is no evidence to suggest that this trend will not continue.
By 2005, the clock speeds of affordable (desktop) microprocessors are predicted to exceed 1 GHz—which is not surprising given that PCs with 100- to 200-MHz clocks are already common. No single approach can accommodate all this growth, yet the specific technology that may achieve the best performance at any particular time is not predictable with confidence. Today's silicon circuitry will not move significantly into the gigahertz range. New technology will appear in
the form of new, more capable device concepts, such as quantum dots and wires, and/or new material systems. GaAs is already capable of 10-GHz rates, and SiGe promises similar performance, in an easier-to-fabricate material system. InP devices could possibly operate at 100 GHz, which is anticipated near 2030. Well before this, superconducting RSFQ logic, with its 100- to 300-GHz potential, should become available in HTS technology. By 2035, the end of the time horizon of this study, currently envisioned RSFQ technology may approach fundamental limits and the technology of choice may have shifted to superconductor quantum dots or a family of devices yet to be invented.
Anticipating technology limits is generally a very difficult task, particularly if the deficiencies are of a practical rather than a theoretical nature. Linewidth, in contrast to other significant technology parameters, may encounter some fundamental obstacles to continued exponential improvement. The most obvious is that, although some day it might be possible to manipulate single atoms on the surface of a wafer, it seems to make no sense at all to discuss dimensions smaller than an atom or molecule. Checking the linewidth dimensions expected by 2035, one finds from Figure 4.6 an estimated fabrication capability of 1/5 to 1 nm, which corresponds to only a few interatomic distances for a silicon surface. Because it is not expected that linewidth fabrication technology will reach this absolute limit by 2035, some as yet unknown sophisticated techniques will have to be developed to permit manufacturing at these levels.
New Physics—Quantum Devices and Nanoelectronics
New types of elementary devices15 based on different physics may become available before atomic dimensional limits are encountered. The exploitation of quantum resonances in one dimension has already found its way into practice through the HEMT or modulation-doped field-effect transistors (MODFETs) and single and multiple quantum well (SQW and MQW) semiconductor lasers.
Precise control of thin-layer deposition to dimensions as small as 5 or 10 nm has been common in semiconductor manufacturing for years. The resulting one-dimensional resonances result in quantum confinement in the vertical dimension, leading to two-dimensional electron gases with a number of useful attributes, such as energy level splitting with restricted energy transfer between levels and a constant density of states.
With the ability to fabricate horizontal structures lithographically with dimensions of 50 to 100 nm, it becomes possible to provide quantum confinement in any or all three dimensions, leading to a variety of quantum plane, wire, and dot configurations. Because of the quantum effects, the number of electrons in
the well of a quantum dot is quantized to an integer number of electrons, and even if the number is as large as tens to hundreds, single-electron changes can be observed.16 Combining quantum dots with very thin insulating layers, single-electron tunneling transistors have been implemented, and the possibility of single-electron logic is on the horizon. Although ingenious designs are being proposed, the less-than-unity voltage gain that characterizes the devices tested to date remains a fundamental unsolved engineering problem.
Research in this promising discipline has been active since its formulation in the mid-1980s. Even quantum molecules—i.e., several closely spaced quantum dots interacting via quantum mechanical tunneling—have been explored. All these single-electron semiconductor concepts apply equally well to superconductor implementations with a single Cooper pair replacing the single electron. The work to date has provided a sound theoretical and experimental basis for the underlying physics. The challenge remaining is to come up with practical, working, manufacturable devices in time to keep up with the exponential growth of digital electronics projected for the time frame beyond 2020. It seems likely that the transition from microelectronics to nanoelectronics and its future high-speed devices will depend on single-charge tunneling effects and the single-electron transistor. The Department of the Navy should pay close attention to this critical technology.
Analog-to-Digital Conversion
Soon, for practically all sensor applications, the detected signals will be digitized as close to the physical world interface as possible. The benefits of a digital signal representation over analog are familiar—fewer, easily miniaturized components for lower size and cost, immunity to component drift, control of computation-induced errors, and great algorithm flexibility. The translation of these analog signals into digital form with adequate signal bandwidth and dynamic range is of critical importance.
Conventional high-performance ADCs are strictly limited by the timing jitter associated with the comparators. Figure 4.8 summarizes the performance of available and projected ADC devices. No conventional ADC performs significantly above the limit indicated for a jitter level on the order of 1 ps root-mean-square.
Analysis indicates that the so-called jitter limit can be succinctly expressed by a single constant value of the product of dynamic range times sampling frequency, that is (2(B+1) - 1) · fsample = 8 × 1011 = 1 ps jitter limit, representing formally the familiar practical tradeoff between these two parameters.
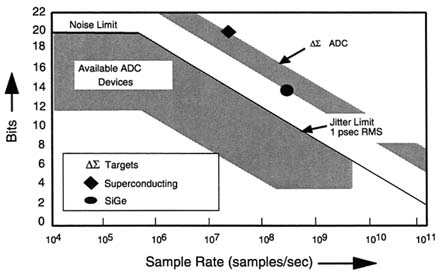
FIGURE 4.8 State-of-the-art analog-to-digital converters. Current development of Delta-Sigma (ΔΣ) devices will add up to 6 bits by the year 2000.
In recent years, although the region of available ADCs has been expanding systematically into the higher sampling rates through developments in GaAs and InP technology, progress across the jitter boundary has moved at a glacial pace—by some estimates, it has been taking about 6 years to gain a single bit. A different concept has been sought—one that avoids the jitter issue entirely, if possible.
Such an approach, the Delta-Sigma (ΔΣ), was already available but as yet unused for RF sample rates. This technology was developed first for audio applications in the 1970s and 1980s and is inherent in the digital audio that underlies CDs and the like today. As a result of this long history, the concepts are well understood today and have proven robust as predicted, permitting high-dynamic-range implementations with inexpensive, modest-to-low-quality components. Today, for the first time, these proven concepts are being extended from megahertz to gigahertz rates and promise to make digital RF systems practical.
In this approach, the signal is greatly over-sampled at a rate that permits a valid 1-bit representation of the difference between successive samples, and the resulting digital representation is passed back through a simple digital-to-analog (D/A) conversion and subtracted from the incoming analog signal to produce a form of differentiation. The resulting filter loop structure is used to move the quantization noise away from the spectral regime that contains the signal information in such a way that when the signal and related quantization noise are
passed through a band pass filter, the reduced quantization noise levels are equivalent to having digitized the signal directly in the conventional manner with multiple-bit accuracy. The output digital data stream is then reduced to the rates appropriate to the information bandwidth of the signal. Depending on the order of the loop structure, the gain in effective number of bits can be 1.5, 2.5, and 3.5 bits, and so on, per octave of oversampling for 1, 2, 3, and so on, pole filters. In strong contrast, the conventional approaches to multibit A/D, which do not try to shape the noise, achieve only a one-half bit per octave increase in effective bits with oversampling.
The loop averages out jitter effects in exchange for new problems—e.g., the higher the order of the loop, the more effective the bits per octave, but the more difficult it is to keep stable. The ΔΣ approach will take us rapidly beyond the jitter barrier of existing ADC for the larger information bandwidths and dynamic ranges, characteristic of high-performance sensors of interest in this study. Successful development of gigahertz ΔΣ technology will produce a distinct jump in ADC performance in the near future. In view of the projected increases in clock speeds, this technology can be expected to provide several bits, i.e., 3.5 per octave for a three-pole loop, every 2 years or so, as additional octaves of oversampling become available through the continuing growth of digital clock speed capabilities.
In Figure 4.8, the points labeled ΔΣ (Delta-Sigma) represent the performance targeted for several noncomparator ADC architectures currently under development for RF sampling rates. Included are one to be implementated in SiGe and one each to be implemented in high-temperature and low-temperature superconductor technology. Both superconductor efforts are addressing the same performance—20 equivalent bits at 20 MHz.
Packaging and Interconnections
Packaging and interconnections, often underestimated or even ignored, are of enormous importance. It does little good to develop powerful digital chips if they cannot be effectively and reliably packaged and interconnected. Some digital circuits already are limited in performance more by the packaging and signal interconnection characteristics than by the basic clock speeds of the individual chips. Performance and packaging are interdependent, and in recent years these interdependencies have grown so strong that it is becoming increasingly difficult to separate the devices from their packaging. Future generations of sensors will utilize very-high-speed, large-area, extremely complex logic and memory chips that must be interconnected and packaged within severe constraints on volume, weight, power-handling capability, and system operating speeds. The digital electronics will be completely integrated into a single unit, and its design and physical implementation, including packaging, will have to be approached from the point of view of a single entity.
Although monolithic or full wafer-scale integration has been a dream for many years, current practice targets the more attainable goal of hybrid wafer-scale integration. In the MCM approach, bare chips—that is, IC chips without packaging of any kind—are attached to a wafer or wafer-like substrate that contains the passive circuitry to supply the chip-to-chip interconnections, very similar to a small backplane or printed wiring board. Starting with two-dimensional configurations, MCM technology now includes consideration of three-dimensional stacked structures that, although providing the desired small sizes, bring up serious challenges in heat removal, z-axis signal interconnectivity, and test and repair. Since such complex modules are both expensive and very difficult to access internally once fabricated, the sensor architecture should be designed with fault-tolerant elements providing resource redundancies and autonomous reconfiguration capabilities.
Many MCM options have been developed, utilizing a wide variety of substrate materials, chip-to-substrate attachment approaches, electrical-signal interconnect technologies—both in-plane, from chip-to-chip, and vertically, from substrate-to-substrate—and thermal control techniques. As yet, no single MCM approach clearly dominates, that is, is optimum for all applications. It is too early to tell if future packaging will evolve as a refinement of the MCM hybrid concepts or whether fabrication practices will eventually permit monolithic, wafer-scale implementations, or whether something else entirely unexpected will appear.
As clock speeds increase, moving signals from place to place without significant loss or distortion becomes increasingly difficult. Currently, within computers or other digital processors, high-speed signals are routed electrically via controlled impedance lines with impedance-matched connections. Only between widely separated computers are high-bandwidth modern fiber-optic communication links routinely employed. Optical interconnects exhibit much less signal loss with propagation distance than does an electrical interconnect and, because of the high frequency of the optical carrier, easily support very-large-bandwidth signals. However, there are serious efficiency penalties associated with modulating the electrical signal information onto and off the optical carrier that are not present in the direct electrical approaches.
In the future, as clock speeds and information bandwidths continue to grow, free-space and fiber-guided optical interconnects will certainly become the preferred way to transfer the ever-growing number of high-speed signals from board to board or even chip to chip.
Whatever the details, it is extremely important that packaging and interconnection considerations so critical to the success of all future high-performance sensors be addressed and be factored into chip design from the beginning, as part of the overall architecture. These technical factors have to be an integral and explicit part of the Navy's future R&D plans.
Computer Technology
Little need be said here about the future of computer technology and its impact on future sensor capabilities. The exponential growth of computer capabilities can be expected to continue throughout the many decades of interest to this study, fueled by advances in device technology, architectures, and software. As the systems grow in the direction of ever larger distributed networks of interconnected multiprocessors, the implications for reliability must be carefully taken into account and both fail-safe and fault-tolerant mechanisms included so that a single failed component cannot pull down the whole network or completely invalidate the outputs.
A history of the growth in throughput capabilities for both supercomputers and affordable (desktop) computers is described in more detail in Chapter 2 of this report.
Perhaps the most interesting possibilities lie not so much with the large, multicomponent computers certain to be needed for powerful sensors systems, such as SAR radars and sonars, digital adaptive beamforming phased arrays, multisensor surveillance networks exploiting data fusion, and so on, but rather with the potential for combining, or in the extreme, integrating, monolithically on the same substrate, sensors with an ADC, a digital processor, and a communication output port to make a complete sensor system on a chip.
Inevitably, multiple copies of these smart sensors will be configured into intercommunicating networks that will act together to perform as a single composite metasensor, sharing, combining, and fusing the individual sensor's data into a total sensor data view that is more powerful than just the sum of the parts. Adding mobility to the individual sensors, useful ant-like societies of intercommunicating microrobot sensors, functioning as large distributed, spatially adaptive, extraordinarily capable surveillance systems, no doubt will follow.
Algorithm Technology
To exploit the enormous opportunities that the exponential growth of digital computing capabilities will continue to provide in the future requires algorithms. For some sensor applications, many years of effort have already been applied and effective algorithms are known to exist. Some of these algorithms find application today, but others have not yet been introduced into practice because the computer or digital signal-processing support available for operational deployment is inadequate to permit real-time implementation. That is, the real-time configurations permitted by today's technology are too large, require too much power, or are simply too expensive for the intended application. The future will certainly change this picture dramatically.
Adaptive Processing
As available computational resources grow beyond the simple requirements of the sensor, whatever that may be—radar, sonar, and electro-optical—it is natural to apply the additional computational power to improving sensor performance by continuously optimizing its processing in response to the observed data. Several easily implemented analog adaptive techniques have long been employed in radar and sonar—constant false alarm (CFAR) detection, with an adjustable detection threshold to prevent the processing of false alarms from overwhelming the real-time capability of the system, and sidelobe cancellation utilizing an adjunct omnidirectional antenna, to distinguish between main beam and sidelobe returns.
With enough digital-computing resources, much more progress can be envisioned. Interfering signals, which are localized in space or frequency or both, can be estimated from the measurements and explicitly subtracted or canceled to improve the detection of the desired target signals. For array antenna systems, performance in the presence of jammers can be greatly enhanced by estimating the direction of the interfering sources and choosing the weights to be applied to the signals from each element such that a null is placed in the antenna pattern in the direction of the interfering signal. For computational reasons, to date these ideas have been applied only to small antennas, i.e., a few to a few tens of elements, or to very-low-frequency radars with several hundred elements—the Navy's operational, relocatable over-the-horizon radar (ROTHR) uses digital beamforming, for example. As it will soon be practical to digitize the return signals on each receive antenna element close to, or at the front end of, a radar, even at X-band and above, digital beamforming of large arrays with hundreds to thousands of elements can be expected in the next 5 to 10 years for a wide range of applications. These possibilities will be developed further under digital radars.
For clutter suppression, similar concepts apply, with the exception that although jammers are typically spectrally complex but well localized spatially, i.e., point sources, clutter is distributed in both space and spectrum. In the particular case of airborne radar, the ground-clutter returns have Doppler offsets that are determined by the aircraft velocity and by the angle between the line of sight to the patch of ground and the aircraft's velocity vector. The solution is thus to introduce spatial nulls into the received beam patterns separately for each Doppler bin. This approach, known as space-time adaptive processing (STAP), is obviously computationally demanding and has yet to be applied to any operational system but is certainly a candidate for the near-term Joint Strike Fighter (JSF) generation of airborne radars.
One of the most intriguing aspects of digital adaptive beamforming is the potential for enabling the use of less-than-perfect radar antennas or optical configurations that can be digitally corrected to provide near-optimal system performance. In this way, digital processing can be used to alleviate difficult
manufacturing issues (associated with high-precision optical components) or to permit antennas to be optimized for other purposes, such as reduced signature.
Automatic Target Recognition
As the volume of sensor-provided data increases and the operational time of advanced weapon systems decreases, automatic target recognition (ATR) becomes mandatory—no human can provide the necessary decisions fast enough. Although certainly challenging, ATR has acquired a reputation for impossibility that does not reflect the facts. It is the case that, given two- and three-dimensional image data visually displayed, and enough time, a trained human is unbeatable in many recognition tasks. Consider, for example, the task of finding a familiar face in the crowd without knowing in advance who it is going to be: A human can do this if the face is familiar to the observer; a computer cannot. But this does not mean that computer-based ATR is impossible. And it does not mean that ATR will not outperform the human in some circumstances.
Several effective ATR applications have already been demonstrated—search-and-destroy armor munition (SADARM) recognizes its specific target automatically through millimeter-wave passive imagery, brilliant antitank (BAT) munition uses a combination of acoustic and IR imagery, and the tactical LIDAR seeker uses LIDAR three-dimensional range-to-pixel imagery to automatically detect and recognize a variety of military targets, such as tanks, trucks, and bridges. In each case a simple form of ATR, tuned to the characteristics of the scenario and simplified to permit real-time implementation, was employed.
Increasing the sophistication and effectiveness of the ATR algorithms faces several obstacles. These challenges for the future include the following:
- First, there are conceptual issues in understanding just what features of the data and what kind of a reference database the human brain uses to achieve superior performance in certain tasks. In a way, this represents the ultimate challenge, and its solution, however incomplete, will no doubt extend well beyond the 40-year window of this study. On the other hand, a computer operates differently from the human brain, performing exhaustive operations far faster and with fewer errors. Just as for the game of chess, completely understanding and imitating the algorithms used by the brain is not a prerequisite for creating a computer program that, with rather brute force techniques, can beat the best human players. In all probability, this will also be true for ATR, and effective algorithms, quite different from those humans use, will be developed.
- Second, many times the ability to perform ATR with a high probability of success and a low probability of false alarm is limited by the information available, rather than by the algorithms employed. If the measurements from an actual target do not differ in any significant way from those of an uninteresting part of the background or from other objects in the scene, then it will not be possible to
- distinguish them and ATR will fail. The obvious approach to resolving this kind of difficulty is to collect more information so that significant differences can be distinguished. This represents one of the common technology trends discussed above. The approach, which promises to significantly improve ATR performance under these circumstances, is to collect multidimensional signatures and combine the information. That is, instead of relying on a single sensor operating on a single spectral band, provide multiple sensors, co-located or separated, that can collect data on many different spectral bands and provide some form of data fusion to properly register the multiple sources of information and to resolve any apparent contradictions. This is simple to describe, but difficult to implement. Not only are multispectral sensors required—and there may be serious physical conflicts at the interface to the outside world if the spectral bands are sufficiently far apart (such as RF and microwave, or RF and IR)—but also advanced signal extraction and data fusion algorithms need to be developed, and the overall computational complexity will inevitably become enormous.
Fast Algorithms
Whatever the algorithm, the fewer the operations required to implement it, the fewer are the computer resources required and the more practical the algorithm becomes. Many effective algorithms—singular value decomposition (SVD) is a good example—are languishing today because the computer resources have not yet met their requirements. The development of a fast algorithm can change everything. The best known example of a fast algorithm is the fast Fourier transform (FFT) that, by exploiting the many symmetries of the discrete Fourier transform, reduced computational requirements without affecting the accuracy of the results. Of course, the growth of computer capabilities will eventually enable brute force implementation of any algorithm, but a fast form will always offer advantages by freeing up computer resources for other tasks. The creation of fast algorithms should remain a focus of research during the period from 2000 to 2035 and beyond.
New Algorithms
From time to time completely new approaches to signal or information processing arise and should be watched and carefully assessed for potential application to sensors. Some such advances represent the development of new mathematics, such as wavelets and chaos, which have given rise to interesting concepts in multirate and nonlinear signal analysis with potential for superior sensor performance. Other advances can arise from attempting to understand the superior performance of some biological systems, such as the sonars of bats or dolphins or the navigational abilities of birds or sea turtles. Enhanced sonar performance
already has been demonstrated using biologically motivated (e.g., bat) signal processing.
Information and Data Extraction
If sensor technology progresses as envisioned, with multiple, multispectral sensor systems and increasing rates of data sampling, the amount of data collected could easily overwhelm the user. In many ways, too much data is equivalent to no data at all. In either case, no useful information is forthcoming. Although ATR goes a way toward resolving this dilemma through the processing of raw data into compressed information—e.g., target type Q, detected at position x-y, with parameters {a, b, c, …}, and so on—not all sensor-produced information is a simple list of targets. It may be a picture of what the sensor is seeing, yet what is important differs from one user to another. The challenge for the future is to develop information-identification and information-extraction algorithms that can identify and encode the interesting information in the data, whatever that might be, so that redundant or uninteresting portions of the data may be deleted or so that the full data set may be characterized such that only those subsets that contain a particular form of information need to be examined in full detail. Better means of identifying information contained in large sensor-generated databases are required, as are better search strategies to efficiently exploit this information.
Data Compression
The final algorithm challenge lies in the necessity to communicate between sensors and from sensors to the users. The reality is that communication bandwidths, particularly those in an active battle zone, will always be severely limited and certainly not capable of moving all of the raw data generated by all the sensors everywhere. The data must be compressed for efficient communication of the significant information without losing important portions or introducing artifacts or false alarms. A major portion of the solution to this communication problem lies in the development of information- and data-extraction algorithms as discussed above.
More straightforward are the more mechanical aspects of encoding the data to be transmitted once the critical information has been extracted in minimal form, although there remain some unresolved issues. If the data is to be transmitted in completely uncorrupted form, it can only be compressed by small factors of two or three by lossless encoding, and this gain may be seriously compromised by the need to apply heavy transmission redundancy encoding if the channel is unreliable, i.e., noisy or jammed. For this situation, the real gain is going to be in information- and data-extraction algorithms.
On the other hand, if imagery to be examined by the user is to be sent, lossy compression—sometimes by factors of 40 or 50 to 1—may be acceptable. Experiments
with medical imagery at these levels of lossy compression have shown little or no difference from the original images in the diagnostics resulting from these images. For two-dimensional images, efficient and effective compression schemes, which exploit the local continuity of the images, have been developed using various transform techniques, including Fourier transforms and wavelets. For higher-order images, that is, higher-dimensional data sets, such algorithms need to be formulated and proven. This is another important and promising area of research for the future.
Technology Vulnerabilities
For many of the technologies just discussed, improved performance carries with it the potential for enhanced or additional vulnerabilities—to deliberate countermeasures or perhaps simply to the environment. Table 4.2 summarizes the most obvious ones. The sources of most of these weaknesses lie with the twofold trends toward low-voltage electronic implementations and complexity.
From the device point of view, as fabrication linewidths decrease, operating voltages and signal levels also decrease in order to avoid excess electric-field conditions, making the electronics more sensitive to noise and pickup effects also known as electromagnetic interference (EMI). This suggests that future, high-performance smart sensors may be quite vulnerable to weapons that employ EMP generation, unless careful consideration is given from the start to providing inherent shielding as part of the packaging. Similar issues arise in semiconductor systems that exploit superconductor bandgap phenomena, such as SQUIDs and RSFQ logic devices, and as a result use voltages comparable to the bandgap, i.e., millivolts.
From the system side, as individual digital devices grow smaller and cheaper and simultaneously more computationally capable, the systems grow more complex. With increasing clock speeds, storing and distributing the data become
TABLE 4.2 Technology Vulnerabilities
|
Technology |
Vulnerabilities |
|
Low-voltage devices |
Electromagnetic interference susceptibilities |
|
Superconductors |
Cryo dependencies |
|
|
Very-low-voltage circuits, EMI |
|
Computers |
Intrinsic reliability, fault tolerance |
|
Software |
Intrinsic reliability |
|
|
Latent faults, correctness |
|
|
Viruses, time bombs |
|
|
Malignant applets or beans |
|
Nanotechnology |
Tasking, networking, fail-safe operation |
|
BOX 4.5 Classes of Individual Sensors
|
increasingly challenging. Multiprocessor configurations introduce new issues of coordination and reliability—the systems become increasingly opaque, i.e., harder to understand and to confirm or guarantee correctness, while simultaneously becoming easier to upset by malicious actions. The cooperating societies of sensors envisioned for the future involve even higher levels of complexity and additional communications vulnerabilities, and also raise difficult questions of sensor autonomy, fail-safe behavior, and the potential for insanity—e.g., could a sensor fail, or be induced to fail, to the point of turning a weapon against its owners?
These generic technology vulnerabilities must be addressed continuously during the development of advanced sensor systems and included explicitly in the assessments of the proposed sensor's utility.
Individual Sensors
Having discussed the state of the art and the observed growth patterns of the five technologies identified as generic to all sensors, the panel now describes the advanced sensors known or thought to be critical to future naval applications that these technologies enable. Each of the individual sensor classes summarized in Box 4.5 is discussed briefly below, with the implications of the general technology trends and projected growth factored into the context of each sensor class.
Electromagnetic Sensors
Radar
Radar, with its all-weather, long-range capabilities for detection and tracking, is the primary electromagnetic sensor in the Navy's tool box and promises to
be useful throughout the time horizon of this study. Most of the common technology trends identified earlier are exhibited by radar technology and provide excellent guidance to the potential future capabilities and applications of this key sensor class.
Phased Arrays
For many decades, radars have been evolving toward distributed phased-array configurations. Given the proven flexible, rapid beamsteering capabilities of electronic scan, with few exceptions new radar implementations—whether surface based or airborne—are envisioned to be phased arrays. Complementing this transition to phased arrays has been the steady replacement of classical microwave tubes and waveguide-based analog components by solid-state microwave equivalents—oscillators, low-noise and low-power amplifiers, phase shifters, complete T/R modules, and the like—in MMIC technology.
Monolithic Microwave Integrated Circuit Technology
For the past decade and a half, as the technology matured, MMIC-based T/R modules have increased steadily in performance while declining in cost, albeit more slowly than desired. With GaAs technology, the output power per module has grown exponentially in the common radar bands, while simultaneous exploitation of decreasing fabrication linewidths combined with new material systems, such as InP and soon SiGe, has extended the operating frequencies through the millimeter-wave bands to 94 GHz and higher. Continuing exponential increases in the performance of individual devices are expected as wide-bandgap material technologies (e.g., SiC, GaN, and diamond) mature.
Millimeter-Wave Frequency
Operating at millimeter-wave frequencies, however, brings with it more serious obstacles to phased-array implementations than simple power generation. At 94 GHz, a millimeter-wave frequency that coincides with a spectral region of minimal atmospheric absorption, the wavelength is only 3 mm, and lower-frequency discrete structural-assembly techniques for half-wavelength separation become difficult, if not impossible, to implement in any straightforward manner. New concepts for continuously distributed phased-array implementations become necessary—calling for higher levels of integration for which the distinction between the array elements and the packaging ultimately should vanish. In spite of the inherent implementation difficulties, precisely because of the small wavelengths, millimeter-wave multibeam antennas offer the potential for generating high-resolution two-dimensional imagery from conveniently small physical antenna. The use
of passive millimeter-wave imaging systems offers interesting, perhaps even breakthrough, possibilities for foliage- and camouflage-penetration.
Module Costs
The overall affordability of a phased-array radar is particularly sensitive to the cost of an individual T/R module. To suppress the large spurious sidelobes known as grating lobes, phased-array elements are usually distributed uniformly across the face of the antenna with an element-to-element separation of not more than a half wavelength. On the other hand, good transverse resolution often requires aperture dimensions that are hundreds of wavelengths across. The result of these two conditions is arrays with hundreds to thousands of array elements. Unless the cost of each element is relatively small, phased arrays may simply not be affordable for many applications. For example, today the cost per element (i.e., total antenna structure cost divided by the number of T/R modules) of an X- band T/R module similar to what is used in the Army's ground-based radar is between $1,000 and $2,000, and so the total cost of such a phased-array antenna (˜20,000 elements) will be millions of dollars. Current efforts target reduction in production costs of an order of magnitude through a combination of increased integration and the manufacturing learning curve. A $300 T/R module has long been the goal, but the current high module costs inhibit the purchase of large, phased-array radars, which in turn reduces the number of T/R modules to be manufactured, thereby limiting the manufacturing learning experience—a chicken and egg situation. There seems little doubt, however, that this situation will eventually be resolved in favor of solid-state phased-array technology and costs will gradually fall into an acceptable, affordable range. Addressing these cost issues over the next several decades as the technologies continue to evolve exponentially should be a Department of the Navy priority.
Multifunctional Systems
Another important trend in radar technology today is the drive toward multifunctional system combinations—operating from the same platform, perhaps even through the same physical aperture. On shipboard or airborne platforms, this could be a combination of different radars for surveillance, tracking, or missile illumination, with RF communication links at different RF frequencies and various wideband EW systems, as is envisioned in the new advanced multifunction RF system (AMRFS) program recently begun by the Office of Naval Research (ONR).
The benefits of such combinations are clear in terms of reduced real estate, opportunities for electromagnetic signature control, and perhaps lower costs, if components can be shared. The obstacles to achieving these advantages lie primarily in the nature of the interface of the sensor to the outside physical world.
Although the internal electronic and digital details of the sensors can be altered fairly arbitrarily, little can be done to change the interface of a radar sensor to the physical world. To project beams, the conditions at the outward surface of the antenna must match the boundary conditions for Maxwell's equations corresponding to the desired mode of propagation, hence the need for half-wavelength array element separations and for certain aperture dimensions. If different spectral ranges are involved, conflicts often arise because of the spectral dispersion of the properties of the materials used to implement the interface aperture—for example, materials that are completely reflective at one frequency might be partially tranmissive at another. Or, if several RF signals of differing spectral bands are passed simultaneously through an amplifier, large unwanted harmonics may be generated through inherent nonlinearity of the amplifier. In other configurations, if different types of RF systems are combined in close physical proximity because of the propagation characteristics of electromagnetic waves, it becomes extremely difficult to ensure that power radiated from one system's aperture or transmit elements does not couple adversely into another's receive elements, and so on.
Conflicts at the interface are fundamental and very difficult to resolve. These issues deserve continuous R&D investments to enable and bring to fruition the very desirable multifunction aperture concepts.
Synthetic Aperture Radar
Synthetic aperture radar, of growing interest and utility because of its high-resolution three-dimensional imaging capabilities, emerged about three decades ago as a creative solution to an interface aperture constraint. Simple diffraction considerations indicate that to obtain, for example, 1-ft radar resolution at several kilometers range from an L-band (1-ft wavelength) radar, the physical antenna must have about the same dimension as the range—i.e., kilometers. Since this was impractical, the solution devised was to exploit the linear nature of Maxwell's equations and create a synthetic phased-array aperture through a series of time samples taken with a small antenna, which was moved sequentially to the physical spatial locations where real phased-array elements would have been located in the physical antenna. The collected samples could then be processed together to produce the desired high-resolution, three-dimensional image. Originally, coherent optical processing was used on the ground, well after the airborne data collection flight took place. In the 1960s, digital processing could not deal with such large amounts of data in reasonable lengths of time, but coherent optics was perfectly matched to the problem and could do it. Gradually, as digital capabilities grew at the factor-of-two-every-2-years exponential rate it still exhibits today, three decades later—and coherent optical processing did not—digital processing took over until today it can easily process most SAR applications in real time, in modest amounts of computer equipment.
As a microwave sensor, SAR combines all-weather and cloud-penetrating capabilities with optical resolution imaging capabilities. It has already found use in airborne and satellite reconnaissance and even in missile guidance. As digital computational capabilities continue to grow throughout the next four decades, SAR concepts will find more and more practical applications.
Digital Radar
Finally, after years of anticipation, a revolution is at hand in radar technology through the exploitation of a combination of modern digital techniques and fiber-optic communications. Not only will the next-generation radars be solid-state phased arrays, but they will also be almost entirely digital, confining the analog microwave portions to the extreme front end interface of the antenna with the outside world. Received signals will be digitized at the element after minimal analog processing—e.g., with an antialiasing filter, a low-noise MMIC amplifier, and perhaps a single stage of up or down conversion—and transmitted in digital form over wideband fiber-optic links to convenient remote locations off the aperture for processing, e.g., digital beamforming, in-phase (I) and quadrative (Q) generation, pulse compression, clutter suppression, target extraction, multihypothesis tracking, and so on. Similarly, for transmit, digitally created waveforms will be generated off aperture and distributed via fiber optics to individual antenna elements where D/A conversion and MMIC power amplification will take place. With all signals in digital form, the phase shifting required by both transmit and receive functions can be implemented digitally by simply delaying the signals to or from individual antenna elements by different amounts. Coarse delays can be obtained by slipping clock cycles and fine delays by digital interpolation. This approach eliminates the need for analog phase shifters in the T/R modules and supplies, without effort, true time-delay digital beamsteering.
There are many obvious advantages in reduced analog drift and enhanced processing flexibility, e.g., digital beamforming and nonlinear filtering, to be gained by digitizing the radar, but the two most significant come through an enormous reduction in the size of the analog receiver hardware needed—a reduction of two orders of magnitude was projected for a proposed digital version of the Navy next-generation fleet surveillance radar—and the architectural flexibility that results from the remoting possibilities offered by digital fiber-optic signal distribution, e.g., possibilities for putting the rest of the radar away from the antenna, anywhere on the ship or airplane. Of course, there are potential penalties, too. A high-speed, high-dynamic-range A/D and D/A converter at every element could be expensive. Creating data samples at gigahertz rates implies that at least some of the subsequent digital processing must be carried out at similar rates—which is admittedly difficult today and possibly power hungry, but is predicted to become easier by a factor of two every 2 years or so. Finally, the
flood of data samples converging on the central signal and data processors conjures up visions of multiple teraflop capabilities.
What enables this potential revolution is the recent progress in ADC technology—in particular the great leap forward promised by the application of the proven Delta-Sigma concepts from the audio spectral range to megahertz signals at gigahertz sampling rates—combined with the inexorable growth of digital capabilities and the coincident maturity of wideband fiber-optic communication technology. Delta-Sigma technology, with its 1-bit over sampled signal representation, suggests future implementation and architectural possibilities. Exploiting single-bit arithmetic, such functions as digital beamforming and time delay can be performed before filtering and decimation down to more conventional multibit information bandwidth data rate representations. Single-bit arithmetic is very efficient, requiring only simple shifts and 1-bit adds, and, by delaying the filtering and decimation, the associated hardware requirements are reduced from one filter-decimation unit per element to one per beam—generally a significant savings in hardware without any anticipated performance penalty.
Given its success in audio applications and the lack of obvious obstacles to its extension from megahertz to gigahertz rates, Delta-Sigma seems certain to succeed in radar as well. The possibilities suggested by the single-bit arithmetic approach outlined above deserve close attention in the near future. In the longer range, greatly enhanced performance can be expected through the application of increasingly capable ADCs, exponentially growing amounts of computer power, and the exploitation of sophisticated algorithms for real-time adaptive digital beamforming, which are not yet implementable with today's computers.
Photonics
In recent years, photonics has become a popular topic in the radar community. The word ''photonics" is fairly imprecise, often used simply to indicate the use of optical techniques—i.e., lasers, optical communication links (free space or fiber optic), mirrors and lenses, and various hybrid components that consolidate optical, electro-optic, and electronic elements into monolithic structures known as optoelectronic integrated circuits (OEICs).
In the radar context, "photonics" usually refers to wideband analog optical implementations of microwave signal distribution and true time-delay steering. Modulating the microwave signals onto a microwave carrier offers a number of advantages, primarily in the reduction of the physical size of the components and an increase in the flexibility of relocating the signal and data processing off the antenna. Placing the microwave signals on an optical carrier changes the physics of propagation completely so that the awkward, often large and expensive wave-guide structures traditionally used to distribute the microwave signals to and from the phased-array elements are replaced by small, lightweight, inexpensive fiber-optic links. And once the signals are on the fiber, increasing the
length of the link to relocate signal generation and processing components that do not have to be on the antenna introduces very little extra penalty, because the loss of typical communications-grade optical fibers is measured in decibels per kilometer. Finally, because the microwave modulation is such a minuscule fraction of the optical carrier frequency, the propagation of all the microwave frequencies takes place without noticeable dispersion and so true-time-delay concepts can be implemented in a relatively straightforward fashion, e.g., by optically switching the signals into different fiber lengths to achieve controllable time delays.
Although many photonic radar configurations have been proposed and simple prototype systems, with only a handful of phase elements, demonstrated, no full-scale implementations have yet been fielded. The primary obstacles are two-fold—from the microwave point of view, fiber-optic links, integrated optics, and electro-optical components are often quite lossy, with losses of several tens of decibels from microwave-in to microwave-out per element or per link not uncommon. This leads quickly to impractical requirements for total laser power to support real radars with thousands of phased-array elements. Approaches based on active integrated optics structures, with built-in gain to compensate for the losses in a distributed fashion, have been proposed and demonstrated to a limited extent, but these possibilities remain in the research stage at the moment. The second major obstacle lies with the analog nature of the photonics approaches—in particular, dynamic range. It is very difficult to find electro-optical components, e.g., modulators and OEICs, that have more than 30- or 40-dB dynamic range, and this just is not enough for most applications.
R&D efforts to improve and mature the technology of photonic components continues today. There is little doubt that photonics can implement such radar tasks as microwave signal distribution and true time delay. But whether this will lead to fieldable, high-performance radars is another question. The competition for the future is, of course, the digital radar. Ironically, the digital radar concept also exploits photonics, but in its most mature COTS form, i.e., fiber-optic digital communications. Just as with SAR coherent optical processing, the growth rate of digital technology so far exceeds that of photonics that it is inevitable that a digital approach will win sooner or later. Looking at the state of the art in these two technologies, it is clear that it will be sooner. Beyond the timing issue, digital radar offers a broader, more flexible capability. Although it may find some niche applications, the photonic radar, on the other hand, is unlikely to supply the general-purpose capability inherent in a digital approach.
Multidimensional Signatures
Collecting additional sensor information about a target from multiple points of view is an obvious technique to improve sensor recognition performance and is one of the important common technology trends identified earlier in this chapter.
Multiple points of view can be interpreted in several different ways. It could mean observing from the same physical sensor on different spectral bands or, equally well, it could mean several sensors in different physical locations observing the target from varying geometric aspects. In radar technology, both forms are in practice. Certain missile seekers currently under development are exploiting the first concept—looking in several widely spaced spectral bands, e.g., RF and millimeter wave, or RF and IR, to generate complementary information. The second interpretation is already in use in the Navy's cooperative engagement capability (CEC), which combines multiple radars with modern communication to produce a result that is greater than the sum of its parts. By sharing the data from all of the existing radars in the vicinity and fusing the results to eliminate duplications or resolve apparent contradictions, a single radar view of the battle space can be constructed for all to use. The radar vision of a single participant is thus usefully extended well beyond the reach of his own radars, greatly enhancing his battlefield awareness.
Passive Radio Frequency
Passive systems do not generally receive much attention in the radar community, although they offer a number of attractive features. The most obvious is that since they do not emit radiation, they are difficult to find and thus are relatively covert. Of course, not emitting actively is not sufficient to be entirely undetectable. RF and optical receiving systems, which focus or image the received radiation, generally produce strong retro-reflections when actively illuminated within the field of view of the sensor, thus redirecting some of the incident radiation back along the same direction it came from. Careful attention to signature control is required to minimize these enhanced cross-section effects that can make a passive sensor less covert than might be thought.
Passive RF sensors exploit the fact that the targets or objects of interest can be illuminated from a number of sources of RF radiation that are not co-located with the receiver. These sources could be artificial and coordinated with the receiver, as in a bistatic radar configuration; they could be artificial and uncoordinated, as when the receiver detects the scattered radiation generated by independent active radars that happen to be operating at the same time; or they could be entirely natural, as a result of the direct, scattered, and reflected thermal radiation from all the objects in the environment, including the targets of interest themselves, the sun and the sky. Recently, as a result of a Navy study of multifunction phased-array applications, bistatic configurations have come under serious scrutiny as the only feasible approach to achieving the transmit-receive isolation required to permit multiple RF systems to operate simultaneously through the same aperture. Bistatic configuration issues will be receiving increased attention in the near future.
Bistatic and Multistatic Systems
The ability to provide U.S. military forces with new types of active radar sensors continues to stress the limited availability of interference-free radiospectrum resources. However, many active emitters of radio energy in the battlefield have the capability to be used as illuminators in either cooperative or noncooperative bistatic or multistatic radar modes in addition to filling their primary function. Although a few successful bistatic cooperative and noncooperative radar systems have been developed for military purposes over the years, in general the U.S. radar community has considered bistatic radar to be less satisfactory than the more conventional, monostatic radar systems. However, radar systems in which the transmitter and receiver are co-located end up being excellent targets for enemy antiradar missile (ARM) attacks, whereas multistatic radars that make use of existing (even enemy) emitters that are present for other, nonradar purposes are not similarly vulnerable to enemy ARM attacks. The richness of radio emitters in conflict areas and the availability of highly capable processing electronics suggest that meeting the need for new radar capabilities involves exploration of the possibility that they can be provided by bistatic and/or multistatic radar configurations using noncooperative emissions from such emitters.
It is possible that the exploitation and further development of this branch of radar technology can be used to provide new radar capabilities for the naval forces—radar capabilities that do not require the expense of radar transmitters and that can function in an almost totally covert manner. Full exploitation of the rapidly evolving capability and capacity of digital data processing and the funds to carry out proof-of-principle exercises involving bistatic and multistatic radar technologies and concepts are worthy of detailed examination. Some applications of bistatic and multistatic radar could be started now; technology understanding is currently adequate to consider new radar solutions today. Certainly, the more applications considered, the more they can become part of the future radar solutions into the indefinite future.
Passive Imagery
Using the sources of natural noise in a scene to provide the illumination for generating a passive image is just what is happening when we use our eyes or a video camera to view a scene. Remarkably, this same concept applies to radar and millimeter-wave RF frequencies (and to acoustic sonar, discussed below) and may offer a breakthrough technology for viewing targets thought to be hidden by smoke, foliage, or camouflage.
Even in the RF spectral range, natural surfaces will emit different amounts of radiation depending on parameters such as temperature and emissivity. In addition, metals are strongly reflective in the RF, which reduces a metal surface's

FIGURE 4.9 Millimeter-wave images of an automobile in a garage. The automobile is recognizable in both pictures, but the second picture was taken with the garage door closed. SOURCE: Smith, R.M. 1996. "The Passive MM-Wave Scenario," Microwave Journal, Wright Laboratories and Millitech Corp., March, p. 22.
emissivity and allows it to produce reflections of other sources in the scene—the most significant being the sky, which looks quite cold compared with Earth's surface environment. Because of these nonuniformities, with enough antenna aperture to achieve narrow beam resolution, passive radar imaging is possible.
For practical reasons involving antenna size, this kind of imaging is usually confined to the millimeter-wave spectral range and has already been applied successfully to targeting of weapons using the apparent cold spot associated with the image of the sky reflected off the top of a tank as the key discriminator. It has long been appreciated that such imaging millimeter-wave systems can see through fog and smoke as these frequencies are not attenuated very strongly, that is, neither scattered nor absorbed. What has not been as well appreciated is that such systems can see through other dielectric materials as well, such as wood, plastic, or tree leaves. Figure 4.9 shows a millimeter-wave image of a car taken through a garage door.
The ability to see through dielectric materials with millimeter-wave systems suggests that passive RF deserves further exploration for the detection and imaging of hidden targets. A combination of thinned arrays and digital techniques, by providing adequate spatial resolution, could extend the practicality of these techniques to lower RF frequencies, where the penetration is even better than at millimeter-wave frequencies.
Electro-optics
The optical portion of the electromagnetic spectrum has been growing in importance for many decades. In spite of the optical spectrum's lack of all
weather capability, its ability to generate very-high-spatial-resolution, two- or three-dimensional images from conveniently small apertures makes it extremely useful in situations that are not troubled by weather obscuration. As the trend in weapons concepts moves inexorably toward smarter, more precise surgical strikes with little or no collateral damage, optical systems are being called on to supply tactical capabilities in target designation, ATR, aim point identification and selection, terminal guidance, and so on, as well as the more conventional surveillance capabilities for sensing and detection.
Passive Imaging
Conventional Focal Plane Arrays. Modern optics has benefited greatly from the development of the computer and the semiconductor microelectronic technology that supports it. When computers first appeared in the 1960s, optical systems—the mirrors and lenses—took a great leap forward as the invention process that had characterized the development of good designs up to then was replaced by a computer-aided engineering discipline that routinely produced affordable, optimized designs. Later, as various semiconductor detector materials were developed to cover different portions of the optical spectral bands, microelectronic fabrication techniques were applied to create imaging detector focal plane arrays (FPAs), i.e., semiconductor chips containing multiple optical detector elements along with the electronic circuitry needed to read them out. FPAs have enabled a wide range of new imaging applications, for not only can they be made much more sensitive than the human eye in certain useful spectral ranges, e.g., the IR where the eye cannot see at all, but also the image information is directly available in electronic form for further enhancement via amplification and filtering or computer processing for sophisticated information extraction.
In recent years, FPA technology has advanced rapidly, following the same kind of exponential growth curves that characterize the rest of semiconductor and microelectronics technology. Figure 4.10 shows a history of the development of visible FPAs.
The growth rate of pixels per chip closely mirrors the exponential growth rate of conventional digital circuits. That the visible and near-IR ranges are the most advanced is no surprise, given that excellent, almost optimal detectors for these spectral regions can be fabricated from silicon. With the read-out electronics also in silicon, completely monolithic focal plane arrays can be fabricated and form the technology basis for the high-quality imagery found in the television industry, as well as camcorders and the digital cameras that are increasing in popularity at the moment. State-of-the-art visible FPAs are now available with as many as 5,000 x 5,000 pixels and all of the support electronics on a single chip.
For other spectral regions, the detector material systems are less mature than silicon and lag in their development accordingly. In the 1- to 5-µm region, monolithic platinum silicide (PtSi) FPAs are available, as well as hybrid arrays of
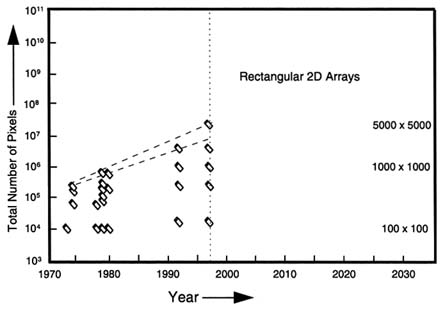
FIGURE 4.10 Visible focal plane array technology. SOURCE: Figure created with data from (1) Theuwissen, Albert J.P., 1995, Solid-State Imaging with Charge-Coupled Devices, Kluwer Academic Publishers, Dordrecht, Boston and London; (2) EG&G Reticon Product Line Catalogs for 1993/1994 and 1994/1995; and (3) Thompson CCD Products Catalog 1992/1993.
indium antimonide (InSb) and mercury cadmium telluride (HgCdTe). The current state of the art on these devices is near the 106 pixel level (1,000 x 1,000 pixels) and can be expected to follow Moore's Law for the near future. In the longer IR wavelengths (8 to 20+ µm), special forms of extrinsic silicon and HgCdTe are becoming available in sizes of 256 x 256 pixels, or a little larger, and can also be expected to grow by a factor of two about every 2 years. In addition to the level of technology maturity, IR FPAs, for reasons of semiconductor physics, must be cooled during operation—often to liquid nitrogen temperatures (77 K) or lower—an awkward, expensive, and often logistically complicated disadvantage.
From a fabrication point of view, there is nothing obvious that would prevent FPA technology from exploiting much of the growth in microelectronics in the near future—certainly with respect to the on-chip read-out electronics. Reducing the detection pixel sizes, however, reduces the number of photons collected by each pixel, thus increasing the statistical noise levels and reducing the available signal dynamic range. It is likely that a point will be reached in the not too distant future at which it no longer makes sense to attempt to further reduce FPA pixel
dimensions. The imagery being detected by an FPA will always be limited by the collection optics and the interface to the physical world, and once the pixel-to-pixel sampling distance satisfies the Nyquist criteria for the primary spatial frequencies allowed by the aperture and the residual detector noise, further over-sampling, i.e., reducing the pixel-to-pixel separation, adds little benefit. At the moment, current state-of-the-art FPA implementations are not yet well matched to their optics, and so there is room for improvement. After matching is achieved, further growth in FPA pixel count will evolve, not as a fabrication-limited process, but as an activity closely coupled with improvements in the collection optics—e.g., larger apertures, lower f-number designs, and wider fields of view.
Uncooled Focal Plane Arrays. Recently, a new class of IR FPAs has appeared, using simple thermal bolometer concepts rather than matched bandgap, exotic semiconductor materials. Microbolometers and the read-out electronics are integrated onto a silicon substrate by means of MEMS technology. Incident IR radiation heats microbolometer pixels and the resulting temperature rise is directly measured by the on-chip electrical circuitry. No cooling to low temperatures is needed and, as the effect utilized is a thermal phenomenon, these FPAs are inherently broadband, responding to a wide range of wavelengths.
Although less sensitive than conventional photodetectors, the uncooled MEMS-based FPAs have demonstrated performance capabilities measured in fractions of a degree—easily enough for a number of important imaging applications. Imaging implementations based on these MEMS focal planes are physically smaller, logistically simpler, and significantly less expensive than those based on conventional FPAs, promising breakthrough applications to many critical naval force applications such as affordable missiles and miniature UAV sensors.
Multi- and Hyperspectral Signatures. Another technology trend, evident in RF and radar technology, is also evident in optics—an interest in collecting multidimensional signatures for more robust image understanding. Dual-mode missile seekers using two different IR bands, carefully chosen to match the scenarios, have already demonstrated superior performance against IR countermeasures and a large reduction in false alarms resulting from such things as sun glints. In support of these applications, FPAs that image simultaneously in two IR spectral bands have been demonstrated in sizes up to 256 x 256 pixels. In some designs, the two arrays are stacked one on top of the other and precisely aligned, pixel to pixel, with the shorter-wavelength detectors substantially transparent to the longer-wavelength radiation that passes through and is detected in a smaller bandgap material below. Stacking in this way leads to convenient, very compact implementations of dual-spectrum FPAs, which have broad applicability to space constrained applications such as missile seekers.
Extending this direct approach to many more than two spectral bands, however, is not practical for a variety of fabrication and performance reasons. Yet
there is great interest, particularly in satellite ground-imaging applications, to collect many simultaneous images in as many different spectral bands as possible, from the UV, through the visible, and well into the IR. The extreme situation, known as hyperspectral imaging, collects hundreds to thousands of such simultaneous images in spectral bands, only a few nanometers wide. As computer technology continues to improve, it will become easier and easier to extract useful information from hyperspectral images in real time, and its use is certain to expand. The potential for subpixel detection offers great promise and should be explored further. Of particular interest to the Navy and Marine Corps is the potential for using spectral imaging to characterize the littoral regions.
Laser Sensors
Although long used successfully on the battlefield as range finders and target illuminators for precision-guided weapons and, most recently, as real-time wind sensors for gunship weapons targeting improvement, lasers have other sophisticated capabilities that have not yet been fully exploited.
Imaging Lidar
After many decades of development, LIDAR or laser-based radar seems poised to enable a variety of important military imaging applications. Combining the range measurement capabilities of microwave radar with optical-quality two-dimensional imaging, imaging LIDAR offers unique sensor characteristics. Its range-to-pixel three-dimensional imagery, with high resolution in all three spatial dimensions, contains much more useful information than either ordinary radar results or a passive optical image of the same scene or target. For target detection and ATR applications, the geometric measurements generated by the LIDAR provide direct information about object dimensions and orientation without the need to search through ranges of possibilities and are completely insensitive to the ambient illumination and temperature effects of a scene that complicate the interpretation of IR imagery. Excellent detection and ATR results have been demonstrated for such imaging LIDAR systems operating from the ground and airborne against a variety of targets in realistic cluttered natural environments, but operational systems have yet to appear. No doubt, with increasing availability of computational resources, more effective algorithms will emerge.
Complementing these performance advantages has been a long-term trend away from the earlier 10-mm carbon dioxide (CO2) gas laser technology, toward diode-pumped, solid-state lasers that operate in the 1-to 2-µm region, near IR spectral bands with good coherence properties, sometimes supported with fiberoptic optical power amplifiers. This has led to significant reductions in transmitter power and volume requirements, enhancing the feasibility and practicality of using LIDAR to detect missiles or other aerial vehicles.
Unfortunately, because the power available from these laser sources is typically measured in watts, rather than the kilowatts that are common in microwave radar, laser radars have limited range capabilities—a few to a few tens of kilometers are typical. And of course, operating at optical wavelengths brings other well-known penalties—lack of all-weather capability and limited search capabilities; that is, the power-aperture products, which are proportional to volume search rate, are typically very small.
In spite of these limitations, however, there is a broad class of applications for which the imaging LIDAR is well suited and for which it offers breakthrough capabilities. Effective target recognition, aim point selection, and precision guidance in the end game are critical for the success of surgical-strike weapons. LIDAR technology can supply these capabilities through its high-quality, three-dimensional, direct geometric imagery and the resulting robust algorithms. The weather-penetration and range limitations can be avoided by employing the LIDAR only in the end game where the ranges are small, whereas the search constraints can be addressed by using a coarse guidance technique, such as GPS or ordinary RF radar, to provide a final LIDAR search region that is guaranteed to contain the target.
Imaging LIDAR technology deserves serious consideration for these classes of precision-guidance applications.
Environmental Sensing LIDAR
The relatively strong interaction of laser beams with the atmosphere and its constituents presents serious performance limitations when the objective is to image solid objects through the atmosphere. However, this same interaction can be turned into an advantage by setting as the objective the measurement of the atmosphere itself, as described below:
-
Wind sensing. The coherent backscatter of focused and scanned CO2 laser beams, from the aerosols naturally found in the atmosphere, has permitted remote characterization of wind fields, i.e., velocity and magnitude, at distances up to several kilometers from the LIDAR. Although first demonstrated almost three decades ago, such a capability has been fielded as part of a weapons system only recently. The multiple rocket launch system (MRLS) employs such a LIDAR to determine, in real time, the winds in the intended path of the rockets, particularly those closest to the launcher where the rockets are moving slowly and are most susceptible to deflection. Algorithms convert these measurements into prelaunch aiming corrections. Altogether, this system has proven successful in enhancing missile accuracy by an order of magnitude. Other possible applications, such as the determination of helicopter local down drafts for similar weapons prelaunch corrections, are under consideration.
The CW CO2 laser technology that supports the MRLS LIDAR is already
- well developed. It is a highly coherent and fairly compact laser with good power output and efficiency. Whether the shorter-wavelength, diode-pumped, solid-state laser technology currently under development can supplant CO2 in this application, with further reductions in size, is a complex issue. The coherency and power requirements favor the longer-wavelength CO2 laser, although the wavelength dependency of the optical scattering cross section of the aerosols, which increases strongly with wavelength because of Mie scattering, favors the shorter-wavelength, solid-state lasers. Since the current development trends emphasize the solid-state developments in preference to further refinements of gas laser technology, it would not be surprising someday to find solid-state technology winning in this arena also.
- Remote sensing of chemical and biological agents. Perhaps a more promising application of LIDAR sensing lies with its potential for the remote detection and localization of environmentally released clouds of chemical or biological agents. Given the ease with which these threats can be created, their timely and accurate detection at a distance will be of increasing importance in the near future. When absorbed by an atom or molecule, a high-peak-power pulse of laser radiation can cause a detectable reradiation (via Raman scattering, for example) that is spectrally shifted by amounts and in patterns characteristic of the scatterer. Because of their nonlinearity, effects like Raman scattering require high-peak-power pulsed sources to generate useful levels of response, which, when combined with a low density of scatterers, e.g., a dispersing cloud of pollutants, severely limits the range capabilities of such a system. Remote sensing LIDARs, based on effects like Raman scattering, have been demonstrated many times in the laboratory and in the field over modest distances, but the technology is a long way from being incorporated into an effective, affordable battlefield system. Tuning the laser source to enhance specific atomic or molecular resonances could greatly improve systems performance, and so research into tunable high-power pulsed solid-state laser sources, for these applications, should be of great interest.
Electronic Scan—Optical-phased Arrays
Optical systems have traditionally relied on analog techniques such as lenses and mirrors to provide beam control. Radar initially adopted the same approach with the use of steerable reflector antennas, but in recent years has largely abandoned this approach in favor of electronically steered phased-array systems that offer the capability for rapid, random beam placement, orders of magnitude faster than can be obtained mechanically.
Direct translation of radar phased-array concepts and techniques into the optical regime is difficult because of the tiny dimensions of the optical wave lengths. With improvements in high-resolution microelectronic fabrication, however, and the discovery and refinement of new classes of optical materials, it became possible about 10 years ago to envision a phased-array, optical beam-steering
technology based on liquid crystals and other electro-optical materials. In the liquid crystal approach, voltages are applied to small volumes of liquid crystal by means of transparent electrodes, which cause internal realignment of the rod-shaped molecules and a consequent voltage-dependent change in the optical phase shift experienced by an optical beam passing through the cell. For visible and near-IR wavelengths, convenient voltages of only 10 or 20 V are sufficient to produce 2![]() phase shifts, and the transparent electrodes are easily deposited to the fine dimensions enabled by optical lithography. Spatially linear phase distributions produce beam deflections, whereas more complicated phase distributions can provide focusing and beam splitting.
phase shifts, and the transparent electrodes are easily deposited to the fine dimensions enabled by optical lithography. Spatially linear phase distributions produce beam deflections, whereas more complicated phase distributions can provide focusing and beam splitting.
Liquid crystal optical phased arrays, with thousands of pixels, already have been fabricated for two-dimensional steering of laser wavelengths from the visible out to 10 µm. Single incident beams can be steered to random positions, can be repositioned with high-precision repeatability, and can be split into complex patterns of spots that can be simultaneously focused and steered to all parts of the field of view. Currently limited to a response time of about 100 ms, new materials and new configurations will reduce this time to 10 ms in the near future.
Optical phased arrays seem to offer yet another possible breakthrough technology enabling electronically controlled modes and capabilities clearly not possible with conventional mirrors and lenses. Combined with advancing FPA technology and the predicted continuing growth of digital and computer capabilities, an all-digital LIDAR may become a reality in the future.
Computational Optics
Short of the revolutionary completely digital LIDAR envisioned above, many intermediate benefits could accrue to optical systems from a hybrid of analog and digital techniques. Fabricating optical imaging systems has always involved a challenging tradeoff between size and weight and the number of aberrations that must be minimized across the desired ranges of spectral wavelengths and physical field of view. As the experience with the Hubble telescope has so dramatically demonstrated, however, the optical system need not be perfect in order for the system to produce perfect images. It is enough to measure just what optical point response the actual optical configuration produces and use this information to correct the images by appropriate digital filtering.
Obviously, as digital and computer capabilities continue to improve at the rate of Moore's law, it will become more and more practical to consider this option. For example, optical assemblies for any application whatsoever could be designed and fabricated, at very low cost, to be nearly diffraction limited, the characteristics measured, and the corrections applied in real time to produce overall diffraction-limited performance at a fraction of the cost of diffraction limited optics.
Another interesting possibility is to consider implementing sparse optical
apertures, i.e., a number of small, coherently related optical subapertures, representing only a small fraction of a much larger aperture that might also be supporting one or more RF systems. With judicious placement of subapertures, and computer compensation of the resulting complicated point-response function, very-high-resolution optical imagery, simultaneous with RF aperture sharing, may be obtainable at affordable costs.
Acoustic Sensors
Sonar
Sonar technology has long been limited severely by the nature of the propagation medium and the complexity of the environment. The ocean medium is inhomogeneous, with a sound velocity of about 1,500 m/s plus or minus about 3 percent, depending on local conditions of temperature, salinity, and pressure that give rise to variable refractive deflections of propagating sound beams. Combined with reflections from the ocean bottom and the sea surface, these inhomogeneities give rise to anomalous propagation channels, in addition to the direct path, e.g., bottom-bounce convergence zones where the propagation paths refract down and up in a sinusoid-like pattern never hitting the bottom or the surface, and surface ducts that combine surface reflections and deep-water refraction. In addition, propagation in the ocean is highly absorptive, with attenuation increasing rapidly with frequency, more or less as frequency squared. As a result, long-range detection requires low frequencies of tens to a few kilohertz, which conflicts with the requirement for narrow-beam resolution. To get many acoustic wavelengths across the aperture, the sonar array often must be longer than the ship or submarine, often requiring towed arrays for good beam resolution. Finally, sonar signals, both active and passive, are often contaminated by multiple reflections from the sea surface and bottom and can be masked by many sources of natural noise such as waves, moving surface ships, and sea animals, thus requiring substantial clutter rejection processing for effective signal extraction.
Recent passive acoustics experiments at sea have demonstrated that signals are far more coherent than previously believed, both spatially and temporally, if accurate propagation models are used and sensor position and source/receiver motion are compensated for. As a consequence, significant gains in passive detection from large, densely populated arrays with both horizontal and vertical apertures and long-duration observations are achievable. Required technologies include miniaturized sensors; towed arrays with fiber-optic links and in situ digitization; fiber-optic connectivity; navigation; unmanned undersea vehicles; high-power wideband active sonar; and capable, intelligent displays.
A full description of this phenomenon is found in another report in this series. Volume 7: Undersea Warfare.
Because of the complexity of the medium and because A/D conversion was
never a serious obstacle, sonar processing became digital long before radar. Very early, sonar adopted transducer arrays as a practical alternative to physically awkward acoustic lens and reflector configurations. Although originally processed with analog techniques, sonar arrays were converted to digital systems several decades ago, and adaptive beamforming was implemented using dedicated, special-purpose custom digital hardware. And a decade ago the use of arrays of COTS microprocessors for digital beamforming, clutter filtering, and ATR imaging processing began. As discussed above, radar is just now on the verge of becoming all-digital for these same functions.
With this early digital start, it is no-surprise to find that the dominant trend in modern sonar is the application of more and more computer processing and the continued evolution of increasingly sophisticated algorithms. Two-dimensional image-processing concepts taken from the optical world, such as edge and textural feature extraction, wavelet processing, and neural net ATR, are being applied to sonar images for such tasks as mine location and identification. And the impressive sonar performance of bats and porpoises, long the object of academic research, has recently led to the implementation of promising, nonlinear, biologically motivated, signal-processing algorithms that have demonstrated greatly reduced rates of false alarm as compared with traditional approaches.
In terms of the transducer hardware, the extreme physical constraints of the medium and environment do not seem to leave much room for significant improvements over the already mature piezo-electric ceramic-based technology of today. On the other hand, there has been continuous slow progress in the application of polymer-based transducers that are easily patterned by photolithographic techniques to have low sidelobe characteristics. This class of transducer materials offers good broadband receive sensitivity but rather limited power-generation capabilities for transmit. Excellent fiber-optic acoustic sensors have been developed for receivers and have found limited application so far. Whether MEMS technology can be applied to provide very compact, inexpensive, sensitive acoustic sensors is yet to be determined, but it seems likely.
Another direction in transducer development involves attempts to achieve the broad-bandwidth high-power transmit waveforms assumed by the biologically motivated algorithms, through novel structures such as the slotted cylinder and multilayer stacks of polymer-based transducers. No doubt, efforts to increase the transducer bandwidths will continue in the future.
To achieve very-high-resolution sonar imagery, very large physical or synthetic apertures are required. This has led to the deployment of large fixed arrays for passive monitoring of critical regions of the world's oceans and to the development of large towed arrays for ships and submarines. Exploiting the obvious alternative of synthetic apertures, which has proven so successful for radar, has been greatly hindered by the fluctuations in the propagation medium and the limited coherence times that result. Although the feasibility of synthetic aperture
sonar (SAS) has been demonstrated, no such device has yet been fielded. Mastery of this technology would seem to be a worthwhile investment for the future.
After many years of emphasis on the deep ocean, the Navy today finds itself increasingly concerned with close-to-shore, littoral operations—a terrible sonar environment with limited direct path opportunities, characterized by numerous reflection sources and other natural sources of noise. Extracting useful information from active or passive sonar returns in this environment is extremely challenging, requiring massive computational resources and clever algorithms. Since exponential growth in computational power is the direction in which technology is progressing, the ability to operate in littoral environments will certainly improve with time.
The multitude of sources of strong noise in the littoral environment can be used as sources of natural illumination in the acoustic spectrum. This may enable passive acoustic imaging, in direct analogy with conventional optical imaging (video) or the millimeter-wave passive RF imaging discussed in Chapter 5. So far, because of the practical difficulties of achieving high-enough resolution from convenient aperture at the frequencies tested, preliminary experiments along this line have not met with great success. The obvious expedient of moving to higher frequencies will improve resolution while simultaneously decreasing the useful range because of the frequency-squared dependence of acoustic absorption. But for littoral environments, with limited line-of-sight direct paths, this may be a reasonable tradeoff. This passive imaging option should be thoroughly explored, for it may offer the possibility of breakthroughs in littoral operations.
The limited direct path characteristic of littoral environments suggests yet another approach, which mirrors trends in land battlefield surveillance—a network of distributed, autonomous, communicating short-range sensors. Assuming progress in power sources, the limited range requirements and the expected continued progress in microelectronics and computers will lead to inexpensive, autonomous minisonar in the future that could be deployed in the suggested distributed fashion. The sticky point in implementing this concept is achieving the degree of communications needed between the individual sensors and back to the ultimate user. Among the possibilities are direct fiber-optic links, which would provide unlimited communication bandwidth if deployment conditions permit; indirect high-bandwidth satellite-mediated links, again if deployment permits; or low-bandwidth acoustic links, which offer serious challenges in terms of low detectability, antijam capability, information extraction, and data compression. It may be possible to disguise acoustic links by imitating the 1/f spectral distributions that characterize many sources of natural noise, including the communications of whales and porpoises. Wavelet mathematics can readily provide such spectra and may offer interesting communication coding possibilities for low-detectability transmissions.
Seismic and Vibration Sensors
Sensing acoustic or mechanical vibrations outside the context of sonar includes applications to monitoring of equipment and machinery for condition-based maintenance. For these applications, both fiber-optic and MEMS vibration sensors—or perhaps a MEMS-optical hybrid for sensitivity—seem ideal, as both approaches lead to very compact, sensitive, inexpensive sensors that have a natural affinity for interfacing with modern digital optical communication networks.
Inertial Sensors
The clear overall trend in inertial sensors is toward miniaturized, all-solid-state implementations, enabled by MEMS and optical technologies. Inertial sensors measure accelerations of the sensor—both linear and rotational—relative to local inertial space and thus always involve mechanical phenomena. Classically, inertial sensors consist simply of a static or a uniformly rotating mass, constrained by mechanical, electric, or magnetic forces. Accelerations are sensed by measurements of the small induced mechanical displacements allowed by the constraints or by measurements of the changes in the electrical currents required to hold the sense mass in its original position relative to the sensor's support structure or local frame of reference.
MEMS permits the sensing masses to be very small and to be fabricated as an integral part of a silicon chip, which can also contain monolithic sensing electronics along with self-test, calibration, and signal-conditioning functions. Air bag sensors, utilizing MEMS technology to measure linear acceleration, are already available commercially.
MEMS offers the possibility of implementing angular accelerometers by monitoring the displacements of miniature vibrating or rotating structures. Application of MEMS to these classes of measurements is still at an early stage, and the resulting measurement capabilities are not yet as refined as can be obtained from the much larger conventional inertial instruments; but improvement is certain to be rapid because the technology is so straightforward.
Aside from MEMS, optics has already made significant inroads into angular acceleration-sensing technology through the introduction of laser and fiber-optic gyros. Still not as capable as the best mechanical gyros, laser and fiber-optic gyros are far less expensive and often more compact than the mechanical alternatives and have found wide use in advanced avionics and missile-guidance applications where the ultimate in performance is not required. Because the physical phenomena on which laser and fiber-optic gyros are based require long optical path lengths for high accuracy, it is not clear that these concepts can exploit MEMS directly. However, integrated MEMS and micro-optomechanical assemblies have already been demonstrated, suggesting that optical on-chip measurements of small
MEMS sensing element displacements may some day be implementable with greatly improved sensitivity over the capacitance or resistance noise-limited measurement techniques currently employed.
Ultimately one can expect to see the A/D conversion function integrated onto the sensor chip, along with exponentially increasing digital signal-processing and computing capabilities, to produce a self-contained, miniature inertial navigation capability—full navigation, not just sensing—and, no doubt, aided by GPS information, when available.
Chemical and Biological Sensors
Although sensing chemical or biological substances remotely at a distance is possible through the LIDAR, most chemical and biological sensors rely on direct physical contact between the sensor interface and the unknown or sought-for substance. For detecting known (sought-for) substances, physical matching between the detector and the target substance in the form of atomic or molecular templates, specific responses, or selective chemical reactions is used. This approach can produce conveniently small, cost-effective, sensitive detectors of sought-for target substances but yields no information about a nontarget that may be present. A more fruitful technique for dealing with unknowns is to carry out basic physical measurements of the molecular structure, by optical or mass spectroscopic techniques, and identify the unknowns by pattern matching against the large databases of known material parameters that have been laboriously accumulated over the years. Until recently, it has been sufficient to make these spectroscopic measurements in the laboratory. As a result these classical, physics-based, chemical and biological sensors are often large (e.g., table-top to room-sized), slow (e.g., minutes to hours), and expensive.
Tiny Time-of-flight Micromass Spectrometer
The threat posed by chemical and biological weapons together with the opportunity afforded by modern optical and digital technology will drive the rapid development of new sensors. Portable, sensitive, fast, inexpensive sensors for chemical and biological sensing are needed for field use today, and development activities in this arena are increasing. The Defense Advanced Research Projects Agency, for one, has mounted a major thrust, emphasizing the detection and identification of biological agents. One of the most sensitive and selective detectors of biological and chemical agents known is the mass spectrometer. DARPA, with Johns Hopkins University's Applied Physics Laboratory, has initiated an ambitious program to develop, in about 5 years, a tiny time-of-flight (TOF) micromass spectrometer. This rugged, fieldable instrument would be small enough (< 5 lb, < 3,000 cm3, < 50 watts) and inexpensive enough (<$25,000) to fly on an unmanned aerial vehicle, would generate data at 10 ms
per spectra, and would be sensitive down to the single-molecule level and flexible enough to work with solid particulates, chemical vapors, and aqueous materials. Combined with advanced sampling and signal processing, this could provide a major advance in chemical and biological sensing with broad applicability to biological and chemical defense, battle-space management, damage assessment, and intelligence collection.
Microelectromechanical Systems
Although the tiny TOF micromass spectrometer represents a quantum leap, so to speak, in the engineering of mass spectrometers and does exploit some modern technology in the form of digital and computer processing and a unique laser vaporization scheme for biological sample preparation, it is only one step toward what may be possible in the future. The ultimate device may be a MEMS mass spectrometer-on-a-chip. With limited prototyping and testing under way at the University of Minnesota, this project targets a 200-g, 0.5-W mass spectrometer, about the size of a penny and costing only $20. As digital technology continues to evolve, doubling in capabilities every 2 years, the signal and data processing eventually will migrate onto the chip to form a smart mass spectrometer-on-a-chip. This seems to be a natural and very promising direction for mass spectrometer sensor development.
MEMS technology enables a host of other creative possibilities for detecting and recognizing biological materials. Among the miniature mechanical components that can be fabricated in MEMS are microfluidic components, such as tiny valves and pumps, which can be configured to create an integrated DNA amplifier based on the PCR process. With microvolumes (1 or 2µl) of sample material and integral on-chip heaters, the temperature cycles required by PCR for doubling the amounts of DNA each cycle can be carried out extremely rapidly—generating detectable amounts of DNA in seconds to minutes, rather than the hours that characterize conventional PCR equipment. Manipulated by microfluidics, the DNA-amplified samples can be inserted into an on-chip microfabricated capillary electrophoresis system with integrated sources and CCD detectors, for optical identification of the DNA. The result is a fast, accurate, and inexpensive DNA identification sensor. Active development of the required microfluidic MEMS technology and the DNA sensor itself is currently under way.
Another MEMS-based biological sensor, currently in development in a number of laboratories, uses an array of microcantilever beams on a MEMS chip to which biological materials can be selectively attracted. Whether something attaches to a specific microcantilever can readily be detected through measurable changes in its mechanical behavior, specifically, its vibration resonance frequency. Larger matrix arrays of cantilevers can readily be fabricated and individual beams selectively coated with specific materials such as oligonucleotides by applying electrical voltages only to the selected beam or beams while flooding
the chip with the oligonucleotide. Washing and flooding with another oligonucleotide, and a different pattern of applied voltages, can be repeated until the whole array is loaded, so to speak. When exposed to an unknown (but anticipated) nuclear material, hybridization will take place only at the beam locations prepared specifically for that material, which can be determined by surveying the mechanical properties of the individual beams in the array. Of course this is a pattern-matching sensor, not a physical-properties sensor, and as such is ineffective when confronted with an unanticipated unknown substance.
In addition to MEMS, a second large class of fiber-optic-based biological and chemical sensors17 seems quite promising in its sensitivity and breath of applicability. The potential of fiber optics for all kinds of sensing,18 particularly remote sensing, was recognized in the 1960s, and the technology was applied to the measurement of the oxygen content of the blood as early as 1962.19 Typically, the material to be identified is brought into contact with the end or a portion of an optical fiber, light from a laser source is sent down the fiber, and through selective absorption or scattering of the incident light by the unknown material or through the generation of fluorescence, the unknown is identified by pattern-matching techniques based on the returned optical signals.
Because of the poor detection sensitivity of absorption and scattering measurements, fluorescence is the most commonly used technique. Fluorescence can be generated directly by the sampled material in some cases or can be assisted by another fluorescent compound that selectively attaches (to tag or label) specific biological or chemical materials. One example of the latter approach is to coat the surface of the exposed core of an optical fiber with a particular antibody that remains attached to the surface of the fiber. When the fiber is exposed to various antigens, only those specific to the bound antibodies will attach. Introducing a free antibody that is fluorescently labeled and that is also specific for the targeted antigen then results in attached (antibody-antigen-labeled antibody) complexes that are detected by their characteristic fluorescence spectrum. The fiber can be prepared with multiple antibodies, which, when combined with differently tagged antibodies, gives the potential for simultaneous detection of multiple antigens.
Under DARPA sponsorship, such fiber-optic biological sensors have been tested against a number of battlefield threats, such as botulism, ricin, plague, and anthrax, and they promise near-real-time (˜5 minutes) detection down to the level of 0.5 to 5.0 ng/ml. Efforts are now under way to miniaturize these sensors. In the long term, this class of sensor may also be compatible with a MEMS implementation.
Using on-chip lasers and detectors, with integrated optical waveguides in place of fibers, very small throwaway ($20) biological sensors could result.
A persistent problem with all types of biological sensors is the difficulty in cleaning or resetting the sensor so that it can be used multiple times, instead of being discarded after a single use. The antibody-antigen-labeled antibody fiber-optic biosensor just described is somewhat reusable in that it can be used a second time if the first trial gives a negative result, that is, when no antigens or labeled antibodies are detected. On the other hand the dog's nose is infinitely resettable (with saturation effects and time constants, to be sure), but ultimately recyclable an unlimited number of times. There is much to learn in this discipline in the future.
Other Sensors
General Local Sensors
Beyond the major sensor classes explicitly discussed above, there are numerous other sensors for measuring just about anything one can imagine, including temperature, humidity, position, stress, strain, speed of flow, shape, roughness, stiffness, compliance, viscosity, electrical resistivity, inductance, interatomic distances, and so on. In terms of future growth, all can be expected to benefit from the digital revolution and the significant microelectronic and digital technology trends that have been described. With few exceptions, the signal conditioning is already, or will soon become, solid state with the signal processing handled digitally. These sensors, except where constrained by the physical interface, will exploit the progress in microelectronics—digital VLSI as well as MEMS—to grow increasingly monolithic, smaller, cheaper, smarter, and distributed, with built-in microprocessor capabilities (i.e., a sensor on a chip) supporting test, calibration, communications, and sophisticated signal-processing algorithms for greatly enhanced performance.
Fiber-optic Sensors
Perhaps the most interesting and versatile of the general sensors are those based on fiber-optic sensor technology.20 Using the same technologies that enable the optoelectronics (e.g., CDs and laser printers) and the telecommunication industries, fiber-optic sensors are rapidly displacing a number of traditional sensors, achieving both higher performance and lower cost. Fiber-optic sensors are discussed above in the context of chemical and biological applications and their role in inertial sensing in the form of the fiber-optic gyro. But fiber-optic sensors
are also capable of measuring electric and magnetic fields, temperature, humidity, viscosity, stress, strain, position, acoustics, and other parameters. Any physical phenomenon that can be used to affect a light beam can provide the basis for a fiber-optic sensor.
The fiber-optic sensor operates by sending a light beam through a fiber to a sensing element that, by an interaction with the physical phenomenon to be sensed, modulates some aspect of the light beam—e.g., amplitude, polarization, and frequency. The modulated return beam then propagates back through the fiber to an optical receiver and a signal/data processor where the information generated at the sensing element is extracted.
Fiber-optic sensors offer a range of inherent advantages including high sensitivity, small size and weight, low power requirements, reliability, and inexpensive components. Of particular value is its ability to remotely locate the passive sensing element in hostile environments or at a significant distance from the power and processing elements because of its use of simple inert materials, its immunity to EMI, and the broadband and low-loss communication capabilities of the fiber. This ability of fiber-optic sensors to sense remotely, along with the safety aspects associated with inert materials and a lack of electrical danger, has been a key element in encouraging their current widespread use in medicine.
One of the most promising new applications, where no equivalent sensors exist, is the concept of smart structures. Building on the capacity for remote operation, the concept envisions networks of fiber-optic sensors, embedded into or attached to structures as they are manufactured, to permit continuous monitoring of the status of the structure for nondestructive evaluation or real-time damage assessment or perhaps to permit control of the shape or strength of the structure via actuators. Applications to all sizes and kinds of structures are possible—structures as small as a single aircraft panel or as large as a bridge, a dam, or a whole ship.
Beyond its versatility, fiber-optic sensor technology possesses an inherent compatibility with the distributed communication networks that will likely dominate future sensor systems. In the near future, fiber-optic sensors of all kinds should continue to become less expensive, displacing more and more traditional sensors and finding new applications. In the long run, they will become increasingly capable along with every other sensor and will find broad use in distributed sensor networks where mobility and wireless communications are not mandatory.
Future Impact on Naval Operations
Expected Evolution of Sensor Technology
Based on the technology trends and historical growth patterns described, the panel anticipates that future sensor technology will be characterized by the following:
- Ever-decreasing size and cost as microelectronics evolves into nanoelectronics within the limits and constraints implied by the physics of the interfaces.
- Migration of the analog-to-digital conversion to the front end of the sensor, leaving only those analog elements absolutely necessary for interfacing with the physical phenomenon to be sensed—e.g., microwave LNA, filters and power amplifiers, fiber-optic transducers, MEMS transducers, and the like.
- Ever-increasing application of computer processing as gigaflops grow to teraflops and then to petaflops.
- Development of monolithic smart sensors, combining sensing transduction, ADC, digital signal processing, communication input and output, and perhaps power conditioning on a single chip. This offers interesting possibilities for very small, very smart weapons such as affordable smart bullets.
Note that not all sensors can be small, even though the electronics can be. Size depends very much on the physics of the physical interface constraints. For example, propagation-based sensors such as RF radar and sonars typically require many wavelengths across the T/R aperture for good spatial resolution. Optical and millimeter-wave sensors, however, with their small wavelengths, and all MEMS-mediated sensors can and will become small and integrated.
- As increasingly capable sensors evolve, it will be natural to deploy collections of autonomous, mobile, communicating sensors that can cooperate to function as a single, higher-level metasensor.
In a sense, the Navy's CEC already functions as a metasensor but is not yet viewed as such. In CEC, the radars are thought of as individual, independent sensors that are cooperating. The meta-interpretation views the cooperating radars as a single sensor, which happens to have distributed and mobile components.
In the future, as individual sensors grow smaller and more capable, and perhaps become autonomously mobile, they will be deployed in environments where each can see only a small part of the scene and can communicate only in a limited sense with other close-by minisensors. Under these conditions it becomes natural to think of the individual sensors as members of a distributed ant-like society that, through only local communications and simple local protocols, manages to behave as a single purposeful entity—that is, a metasensor. Investigations of the dynamics and potentially chaotic behavior of such distributed systems (e.g., flocks of birds or schools of fish) have recently begun to appear in the physics literature. This direction of research should be carefully nurtured. Figure 4.11 illustrates this evolution.
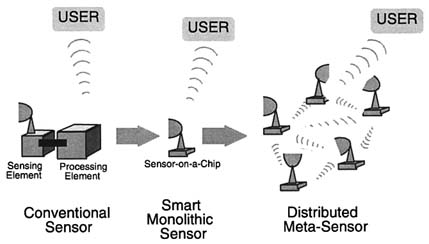
FIGURE 4.11 Sensor evolution
What Will the Evolution of Sensor Technology Enable?
Broadly speaking, eventually sensor technology will allow us to know everything and to hit anything.
Know Everything—Situational Awareness
With unlimited computational power and affordable, micro- and nanoelectronic monolithic sensor implementations in hand, the battlefield environment can be thoroughly examined by distributions of smart sensors and metasensors from multiple points of view, in multiple spectral bands, with high spatial and temporal resolution, through natural and manmade obscurations to provide a continuous awareness of the current situation. Who and what are present? Precisely where are they? Which are friends and which enemies? Are there threats present? What kind? Precisely where? What are they doing? These are the kinds of questions for which sensor information will be supplied.
Hit Anything—Surgical Smart Weapons
With high-resolution imaging sensors of many kinds, effective ATR and aim point selection algorithms, and large amounts of affordable and compact computational power, ever smaller and smarter weapons can be envisioned. Such inexpensive weapons, able to identify and precisely strike intended targets with high probability, can have great cost and logistic advantage. As the sensors get
smaller and smarter, one can even imagine shrinking smart bombs to the level of smart bullets—a small bit of explosive, guided by a miniature monolithic smart sensor and controlled by means of MEMS boundary layer actuators. The panel believes that an adequate aerospace industry manufacturing infrastructure remains to produce smart weapons at a reasonable cost if the production runs are large enough.
Caveats
The panel sets forth the following caveats:
- The transition from microelectronics to nanoelectronics or to superconductor RSFQ logic implies significant reductions in operating voltages along with the threat of increasing EMI vulnerability.
- As the number of observing, communicating sensors on the battlefield increases, the threat of data overload also increases. At the very least, efficient and effective information-extraction procedures must be developed.
- Ever-increasing trends toward small, smart sensor and weapon combinations with various degrees of autonomy conjure up the possibility that the weapon will somehow turn on its masters. As autonomy is a matter of degree rather than a binary issue, confidence in the systems will evolve gradually.
- As mobile autonomous smart sensors and cooperating metasensors evolve, communications integrity will become an increasingly important issue.
- In addition, the information-networking aspects inherent in these distributed concepts suggest increasing vulnerabilities to the threat of conscious attack by means of the techniques of information warfare.
Developments Needed—Military Versus Commercial
The panel sees the five steps listed below as promising an overall sensor development strategy:
- Application of existing currently available state-of-the-art technologies. COTS products will cover much of this need, perhaps with some special packaging to make them suitable for the military environment.
- Basic research and development to keep the technology growth curves growing. DOD is the primary support for these critical activities. This includes such topics as wide-bandgap semiconductors, quantum wires and dots such as single-electron transistors, superconductors such as HTS, RFSQ logic, quantum computing, molecular computing, passive imaging RF/acoustics, meta-sensor community dynamics, and so forth.
- Realization that this technology growth does not imply that only 6.1 expenditures
- are necessary. For many technologies, superconductor RSFQ logic, RSFQ logic, for example, considerable 6.2 and 6.3 engineering developments as well as investments in manufacturing technologies are required to attain the desired economical performance levels.
- Attention to DOD-specific needs that must be addressed (applicable to the Department of the Navy also). This category includes such topics as digital radar, condition-based maintenance, and common-aperture electromagnetic sensor combinations, and so forth.
- Attention to Navy Department specific needs that must be addressed (ocean issues that will not be addressed by anyone else). This category includes such topics as littoral environments, synthetic aperture sonar, communications in the ocean, and so forth.
Foreign Technology Status and Trends
The technologies underlying sensors, including semiconductor and superconductor technology, digital microelectronics, computers and software, microwave, optics, and acoustic technology, and biotechnology are available worldwide. In many of these areas, the United States is not necessarily the leader, although we are not seriously deficient in any of them. Generally, the U.S. advantage lies more with the large amount of resources it is willing to invest in vigorously applying the technology to military problems, rather than with an inherent dominance of the individual technologies.
Some of this is suggested by a critical technologies plan21 crafted by the DOD in 1990, when the Soviet Union was still thought to be the prime threat. Table 4.3 is a summary assessment of foreign technical capabilities vis-à-vis those of the United States adapted from the DOD report. Interestingly enough, this study concluded that in the all-important area of microelectronics, Japan led the United States in all areas except radiation-hardened electronics, for which there is only a limited commercial market, principally satellite and nuclear power plants. Japan also excelled in photonics, superconductivity, and biotechnology, with considerable strength in machine intelligence and robotics, which are particularly relevant to the development of metasensors. The manufacturing of microelectronics has now spread throughout Southeast Asia. And China, with its vast human resources and unquestionably competent scientists and engineers, is rapidly coming up to speed. The 1990 DOD report also suggested that although North Atlantic Treaty Organization (NATO) allies were lagging at that time in most microelectronic technologies, this situation could change drastically in the near term if the capabilities of individual European countries were integrated.
TABLE 4.3 Summary of Foreign Technical Capabilities
|
Critical Technologies |
USSR |
NATO Alliens |
Japan |
|
Semiconductor materials and microelectronic circuits |
◆ |
◇◇ |
◇◇◇◇ |
|
Software producibility |
◆ |
◇◇ |
◇◇ |
|
Parallel computer architectures |
◆ |
◇◇ |
◇◇ |
|
Machine intelligence and robotics |
◆ |
◇◇◇ |
◇◇◇◇ |
|
Simulation and modeling |
◆ |
◇◇◇ |
◇◇◇ |
|
Photonics |
◆◆ |
◇◇ |
◇◇◇◇ |
|
Sensitive radar |
◆ |
◇◇ |
◇◇ |
|
Passive sensors |
◆◆ |
◇◇ |
◇◇ |
|
Signal processing |
◆◆ |
◇◇ |
◇◇ |
|
Signature control |
◆◆ |
◇◇ |
◇◇ |
|
Weapon system environment |
◆◆◆ |
◇◇◇ |
◇◇ |
|
Data fusion |
◆◆ |
◇◇ |
◇◇ |
|
Computational fluid dynamics |
◆ |
◇◇ |
◇◇ |
|
Air-breathing propulsion |
◆◆ |
◇◇◇ |
◇◇ |
|
Pulsed power |
◆◆◆◆ |
◇◇ |
◇◇ |
|
Hypervelocity projectiles |
◆◆◆ |
◇◇ |
◇◇ |
|
High-energy-density material |
◆◆◆ |
◇◇◇ |
◇◇◇ |
|
Composite materials |
◆◆ |
◇◇◇ |
◇◇◇ |
|
Superconductivity |
◆◆ |
◇◇ |
◇◇◇◇ |
|
Biotechnology materials and processes |
◆◆ |
◇◇◇ |
◇◇◇◇ |
|
Position of USSR relative to the United States |
Capabilities of others to contribute to the technology |
||
|
◆◆◆◆ |
Significant leads in some niches of technology |
◇◇◇◇ |
Significantly ahead in some niches of technology |
|
◆◆◆ |
Generally on a par with the United States |
◇◇◇ |
Capable of making major contributions |
|
◆◆ |
Generally lagging except in some areas |
◇◇ |
Capable of making some contributions |
|
◆ |
Lagging in all important aspects |
◇ |
Unlikely to make any immediate contribution |
|
SOURCE: Adapted from Department of Defense, 1990, Critical Technologies, Department of Defense, Washington, D.C., March 15. |
|||
That other nations excel in various sensor areas is well known. In fact, the Navy is currently deploying a shipboard infrared video ◡ system made by the French rather than a U.S. version. In another sensor application, it is known that the former Soviet Union has already deployed dual-band optical missile seekers with antijam performance superior to that of U.S. systems.
In other words, just about everybody has the requisite technology to compete in sensor technology. The race will go to the diligent.
Time Scale for Development and Deployment
In a general way, the time scale has been addressed through the identification of the exponential growth characteristics of various technology components and their projected performance capabilities as a function of time out to 2035. Over the next four decades, sensors will continue to evolve, and advances can be expected to be deployed within about 5 years of the time of the projected state-of-the-art capability.
Note that all of the technology growth curves presented are conservative, in that they represent affordable, obtainable capabilities, representative of the near state of the art—not the best, one-of-a-kind achievements. For example, the clock speed of microprocessors in desktop personal computers is indicated as 200 MHz today, which is available as a COTS Pentium or Cyrix 6 × 86 from multiple suppliers. Processors with speeds exceeding this have been demonstrated already, with the best performance currently reaching the 400- to 600-MHz range. With this in mind, desktop computers with clock speeds of 1 GHz are expected to be commercially available by about 2005, and military applications of 1-GHz computers might reach the field over the next 5 years from 2005 to 2010.
Recomendation
Naval operations are increasingly dependent on enhanced sensor data to provide situational awareness, target designation, weapon guidance, condition-based maintenance, platform automation, personnel health and safety monitoring, and logistic management. The Department of the Navy should provide continuing support of sensor technology for areas critical to future naval operations. Special attention should be given to applications of microelectromechanical systems technology because it offers the advantage of low-cost, high-capability systems-on-a-chip that will enable future cooperative sensor networks.













































































