
Hydrodynamic Optimization of Fast-Displacement Catamarans
A.Papanikolaou, P.Kaklis, C.Koskinas, D.Spanos (National Technical University of Athens, Greece)
ABSTRACT
The paper addresses a systematic, computer-aided optimization procedure for the efficient hull form development of Fast Displacement Catamarans. The procedure is based on a methodology for the minimization of the calm water resistance, particularly the wave resistance, of slender, twin hull vessels of arbitrary shape, considering their seakeeping performance and various geometric parameters set by design or by other operational constraints. The presented hydrodynamic procedure is thought to be embedded within an overall optimization procedure with respect to specific economic criteria. Alternative mathematical models and computer algorithms for the wave resistance of arbitrarily shaped hull forms have been developed and applied herein, namely simplified approaches based on Michell's original source distribution concept, but accounting for the interaction of the demihulls and for any asymmetries of the slender/thin demihull forms through a doublet centerplane distribution, and alternatively a Neumann-Kelvin 3D panel source approach that is generally applicable to arbitrary hull forms. The developed theoretical-numerical methods have been applied systematically to the hull form development of a variety of Fast Displacement Catamarans and they are in general validated through model tests. Comparative results for the wave resistance and horsepower requirement of two SWATH ships and two Displacement Catamarans are presented and discussed, considering their overall hydrodynamic and efficiency performance.
1.
INTRODUCTION
The past decade has witnessed a rapid growth of interest in the development of Fast (and Advanced) Marine Vehicles for various applications. Whereas, in the past, the design of fast marine vehicles appeared to be of interest only to navy authorities, the most recent developments seem to be driven mainly by commercial applications. A state of the art in the field is outside the scope of the present paper, however the Proceedings of the FAST Marine Transportation Conferences (FAST '91, '93, '95) include several papers covering completely the subject.
The optimal hull form development of Fast Marine Vehicles is of particular interest, both from the hydrodynamic and design point of view, but also from the construction, operational and eventually economic point of view. The relatively high ship velocity requires increased effort as to the minimization of the ship's resistance, particularly the wave resistance, as well as to the seakeeping behaviour of ship under consideration. Stability proves to be a severe design constraint for fast ships in general, even in the intact case. Considering in addition the damage stability of fast ships after grounding or collision, it seems that certain advantages of the monohull concept against the multihulls, particularly the smaller wetted surface and structural weight for equal displacement, will have to be reconsidered in the future. Therefore, an increased interest into the design of Fast Multi-Hull Vessels can be expected in the future.
We consider herein so-called Fast Displacement Catamarans (FDCs), these are twin hull vessels operating at Froude numbers between approximately 0.4 and 0.8, thus ships practically operating at the end of the hollow before the “last hump” of the wave resistance coefficient and up to the stage of the begin of planing. This speed range is of major interest to hydrodynamicists, because of the rapid change and relative increase of the wave resistance coefficient, as compared to the other resistance components. In addition, the particular speed range fits within present design requirements in practice, when looking for medium to high-speed passenger/car ferries, fast shortsea cargo ships, cruising/patrol/surveillance/supply/oceanographic vessels, and other ship types characterized by their appreciable speed and seaworthiness in moderate and
sometimes high seastates (see, [1] to [5] for examples). It is of particular interest to note, that depending on the specified service speed and payload capacity all designs mentioned above, except for the patrol vessel [4], have been developed assuming steel as main structural material, therefore avoiding the particular problems related to an aluminum alloy or synthetic material structure. The increased structural weight of a steel catamaran introduces additional requirements into the present hydrodynamic optimization problem.
The demihull form of the addressed twin hull vessels can be assumed, by common design sense, to be slender, thus changing slowly in the longitudinal direction, but else being of arbitrary shape. Thus we should consider herein symmetric or non-symmetric demihull sections, but in general arbitrarily shaped thin or slender hull forms, varying else arbitrarily in both the transverse and in the vertical direction. Therefore we address practically all thinkable displacement CATAMARAN hull forms, including SWATHs1 and Hybrids2.
The present paper is focusing on the calm water performance of Fast Displacement Catamarans and their hull form optimization with respect to least horsepower requirement, assuming the desired vessel's speed and displacement3 known and considering various geometric parameters set by design or by other operational constraints. The employed optimization procedure consists of two basic stages, namely, in the first phase a global procedure leading to the main dimensions and integral form and weight characteristics of the ship, whereas in the second phase a local form optimization is performed leading to the exact geometric characteristics and the final hull form of the vessel under consideration. The overall goal of the above optimization process is to generate, with the least possible computational and experimental effort, seakind catamaran hull forms with low weight and resistance characteristics. From the naval architectural point of view these requirements are contradictory, because a seakind catamaran requires moderate stiffness (low to moderate metacentric height), thus small separation distance between the demihulls, what has the additional positive effect of low structural weight, whereas the low resistance (and especially, for fast catamarans, low wave resistance) requirement, that indirectly calls for reduced machinery and fuel weight, suggests a large separation distance for the demihulls, for avoiding the negative interference effects on resistance, that can easily triple the single demihull's resistance [6]. Therefore, a formal optimization procedure for fast catamarans should be looking for twin hull arrangements exhibiting the least possible separation distance for the demihulls, thus disposing reduced structural weight and moderate stiffness in roll direction, without compromising on the increase of the sum total of the demihulls' single resistance. Instead of, it is expected that through proper shaping of demihulls the interference resistance can be tuned to be, for the speed range of interest, small and even below zero. Because of the multiple parameters involved, it seems very difficult, if not impossible, considering reasonable effort, to address the problem of hydrodynamic optimization of fast displacement catamarans only by systematic model experiments. Therefore, a computer-aided hull form design procedure, as presented herein, seems essential for the concept and initial hull form development, that can be later on verified by a limited number of model tests.
The following paper is intended to explain the details of the above outlined theoretical/numerical methods, especially the essence of our thin, non-symmetric twin-hull wave resistance theory as well as our 3D panel source wave resistance method, including the related algorithms and the validation by model experiments. It should further show the impact of theoretical/numerical hydrodynamic methods on catamaran hull form design within a formal optimization procedure and finally to draw conclusions as to the methodology for the design of optimal Fast Displacement CATAMARAN hull forms.
The rest of the present paper is organized as following. Chapter 2 addresses briefly the overall design methodology and optimization procedure. Chapter 3 describes the essence of the employed hydrodynamic module within the formulated optimization procedure. Chapter 4 includes the presentation and discussion of theoretical results for
|
1 |
SWATH: Small Waterplane Area Twin Hull is synonym to SSC: Semi-Submerged Catamaran (MITSUI's Co. brand-name) |
|
2 |
Hybrids: herein understood as a mixture of a conventional displacement catamaran hull form with a SWATH: Medium Waterplane Area Twin Hulls (MWATHs), Fast Displacement Catamarans (FDCs, FBM Marine Ltd brand-name), etc. |
|
3 |
It is more correct to assume, instead of the displacement, the payload capacity given by the owner's requirements. However, an optimization with respect to the least horsepower requirement, as suggested herein, assuming the displacement and the speed of operation fixed, leads eventually for fast displacement catamarans to ship designs with maximum payload capacity. |
the wave resistance and horsepower requirement for several Fast Displacement Catamaran hull forms, designed by the Ship Design Laboratory of NTUA, and their comparison with model experimental data. Finally, the attached Appendices refer to a more detailed outline of the employed wave resistance theories (simplified thin ship theory for nonsymmetric catamarans and strict Neumann-Kelvin 3D panel source approach).
2.
DESIGN METHODOLOGY
Due to the innovative character of the design of Fast Displacement Catamarans, including SWATHs and Hybrids, it is essential to set-up a specific computer-aided design procedure, allowing the convenient and reliable repeat of the necessary steps following the design spiral. The overall design methodology and optimization procedure consists of several independent but interacting modules, namely (see Flowchart, Fig. 1, [7])
-
The Conceptual Design Synthesis Program, consisting of simplified algorithms and data bases of previous designs. It allows the generic design of a standardized ship, assuming the initial owner's requirements known. It might call, optionally, the hull geometry module (hull-form generator and shiplines fairing under shape and integral constraints [8]).
-
The technoeconomic Parametric Economic Evaluation module, that is employing the Conceptual Design Synthesis Program as a pre-processor (evaluation of shipbuilding cost, operational cost, Required Freight Rate RFR or Net Present Value NPV, [9]).
-
The Hydrodynamic Optimization module consisting of algorithms for the Hydrodynamic Analysis (evaluation of calm water resistance and of seakeeping, [10], [11], [12], [13], [14]) and for the formal Hull Form Optimization (global NLP optimization by the so-called Reduced Gradient Method [15] and local form optimization by LAGRANGE method, [9], [10]).
-
The Preliminary Design Synthesis Program consisting of various software packages for the handling of the hull geometry and preparation of common naval architectural drawings (ship lines and general arrangements4), the powering, the seakeeping and the structural design (see [7] for details).
It is Hydrodynamic Optimization module, and especially the evaluation of wave resistance, that will be elaborated herein in more details.
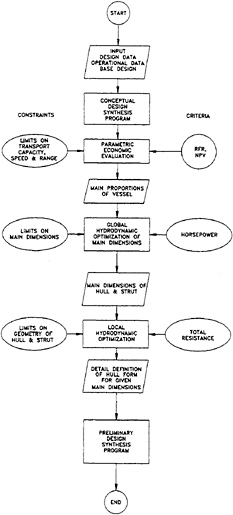
Fig. 1 Multi-stage optimization and global design procedure for Fast Displacement Catamarans
|
4 |
AUTOCAD™, AUTOSHIP™ |
3.
HYDRODYNAMIC MODULE
3.1
Twin Hull Wave Resistance
In the present paper, we restrict our attention to the address of efficient and reliable methods for the calculation of the wave resistance of fast displacement catamarans. In doing so we tacitly assume, that the frictional and the viscous-pressure part of resistance of slender hulls, as the demihulls of catamarans are, can be successfully approached by common semi-empirical methods (ITTC line with a form factor acc. to systematic experiments and semi-empirical formulas). Of course, the problem of catamaran stern flow separation at higher speeds, needs to be considered separately, in connection with the arrangement of an optimal propulsion system. In any case it can be assumed, due to the slenderness of the demihulls, that the uniformity of the propeller onset flow of fast displacement catamarans, and especially of those having SWATH-like stern sections, will eventually contribute to a relatively high propulsive efficiency5.
It is well established that the determination of the wave resistance of symmetric slender or thin twin hull vessels can be easily achieved by application of the classical theories of Michell-Havelock (monohulls) and Strettenskii-Eggers (monohull in a canal and twin-hulls) [16], [17]. They all lead to relatively simple formulas for the wave resistance, in terms of simple type centerline or centerplane Kelvin source distributions, the strength of which is derived immediately from the hull form characteristics of the studied vessel. These methods consider the effects of hull interaction on the catamaran wave resistance in an approximate way, namely by superposition of the individual demihull's far-field wave pattern and thereafter by employment of a modified KOCHIN function to calculate the catamaran's wave resistance. Eventually, there is a direct relation between the wave resistance and the ship's hull form, defined by the hull offsets. Extending this concept also to the frictional part of resistance, being directly proportional to the local Reynolds number and the hull surface area, it is possible to deduce a direct functional relationship between the sum total of the wave and frictional resistance6 and the ship's hull form offsets, leading to the formulation of a systematic optimization procedure by Lagrange's multiplier method (see, Papanikolaou, A. and Androulakakis, M., FAST'91, 1991, [10]). This method, that proves to be very efficient and fast, was applied successfully in the past to the design of several SWATHs and thin, but symmetric, Catamarans and the theoretical predictions have been validated, in most cases, successfully by model experiments.
Whereas the above procedure is limited to symmetric catamaran hull forms only, a fair portion of existing and under development displacement Catamarans have non-symmetric demihull forms for manifold practical reasons, including the hydrodynamic performance in calm water and in waves. The design of nonsymmetric catamaran hull forms has been addressed, until now, only by use of semiempirical methods and model experiments. We present herein an extension of the traditional wave resistance of Michell-Strettenskii for thin non-symmetric demihull forms. The proposed method extends Michell's original approach by including, in addition to the centerplane sources, a centerplane normal dipole distribution, the strength of which is related to the asymmetry of the demihull form. It can be determined numerically by solution of a properly formulated Hypersingular Integral Equation of first kind. Alternatively, the solution of the above integral equation can be approximated by an asymptotic expansion in terms of the local hull geometry characteristics (see details of the complete theory in Kaklis, P. and Papanikolaou, A., 1992, [11], Spanos, D., 1995 [13] and summary in Appendix A). This particular method, that is, at our knowledge, new in the international literature, has been applied systematically to a variety of standardized twin hull arrangements (non-symmetric demihull forms of WIGLEY or wallsided strut type). Therefrom, some important conclusions concerning the influence of the section asymmetry on the wave resistance, and especially on the hull interaction resistance, can be deduced. The implementation of this procedure into the overall optimization scheme, introduced before, will eventually lead to innovative demihull forms of least wave resistance, depending on the speed, displacement and separation distance of the
|
5 |
Attention should be paid to the reduction of the propulsive efficiency at speeds, corresponding to extreme “humps” in the wave resistance curve, when the propeller is operating under a local wave “trough” |
|
6 |
it is essential to include in the formulation of local form optimization problem, by Lagrange's multipliers method, the frictional resistance, because of the “ill-conditioning” of the coefficient matrix, to be inverted for the problem solution (see, Salvesen, N., Von Kerczek, E.H., et al, Trans. SNAME, Vol. 93, pp. 325–346, 1985). |
demihulls, specified by other design constraints. However, it remains to validate the obtained theoretical results for the nonsymmetric demihull forms by systematic model experiments.
For the validation of the above simplified methods, pertaining for thin demihull forms having a sufficiently large separation distance, and for accounting more general twin-hull arrangements, we employed a full 3D panel source method, that is based on a complete analytical-numerical solution to the well-known Neumann-Kelvin problem (see, Koskinas, C., 1995, [12]). This latter method, the computer algorithm of which has been recently completed at SDL-NTUA, is based on the evaluation of the 3D Green Function of the travelling source by use of Newman's methodology [18], as to the Double Integral term, whereas the Far Field disturbance term has been approached by the suggested method of Baar and Price [19], considering Bessho's expansions in Neumann series [20]. The developed 3D panel source approach has been validated successfully for a variety of hull forms, both monohulls and catamarans, as shown in the following example cases. A brief summary of the theory is given in Appendix B, but more details in [12].
Finally, the validation of the above presented theoretical-numerical methods has been established by systematic model experiments performed at the Marine Hydrodynamics Laboratory of NTUA and partly at the Towing Tank of VWS Berlin. The validation concerns a variety of standard Wigley twin-hull arrangements and several practical designs, developed at the Ship Design Laboratory of NTUA, namely here two high speed SWATHs and two medium to high speed displacement Catamarans.
3.2
Twin Hull Seakeeping
It is outside the scope of the present paper, to describe the theoretical methods used for the seakeeping analysis of the addressed Fast Displacement Catamarans. Details of the employed 3D, alternatively quasi 2D, panel source methods can be found in previous publications of the first of the authors ([14]). We restrict herein ourselves into the description of the general methodology for the design of Fast Displacement Catamarans with optimal seakeeping characteristics. The adopted methodology leads to specific design requirements that can be incorporated as constraints on the hull geometry or as qualitative criteria within the formal optimization procedure for the ship's calm water performance, presented before.
The responses of a ship in a seaway are naturally determined by two basic aspects:
-
The ship characteristics: mainly the ship's mass, including the mass distribution, and her natural periods in heave, pitch and roll.
-
The seaway characteristics: the amplitude and period of the exciting waves and the resulting wave exciting forces and moments.
Given the speed of the ship, and indirectly her mass7, as well as the operational environment (wave characteristics), the methodology for reducing the ship responses, by design, consists in measures to tune the values of the ship's natural periods, to be outside the range of possible resonance with the exciting waves, and to reduce the amplitudes of the wave exciting forces, e.g. by proper hull form shaping and favourable weight distribution to the extent possible within the limits of design and operation of the vessel.
As to the tuning of the natural periods, it is well known that, besides the fine-tuning through motion damping devices (fins etc.), the only tool practically available to the designer is the variation of the waterplane area and, to a certain limited degree8, the variation of the ship's underwater hull form determining the “added” mass and moment values.
The slenderness and thinness of the demihulls of Fast Displacement Catamarans and the generally small waterplane area will contribute, in general terms, to a shift of the natural periods in heave, pitch and roll to relatively high values, therefore outside the range of resonance with short period waves, typical to many coastal areas 9. In addition, assuming a high forward speed, the vessels will always tend to operate “undercritical”, especially
|
7 |
It is tacitly assumed, that, at the stage of evaluation of the seakeeping performance, the displacement of the ship is fixed through the initial design procedure (for given payload capacity and specific design arrangements, speed and range, an estimation of the weights for the structure, machinery, outfitting and consumables is possible). |
|
8 |
The underwater ship hull form, especially of a fast ship, is commonly determined by low resistance aspects. |
|
9 |
We assume that Fast Displacement Catamarans will be mainly operating in coastal areas with short period seas. A typical example is the Aegean Sea Archipelago with a typical year-round peak wave period of 5.0 sec. |
in head seas, due to the effectively very small period of wave encounter. A typical representative of this type of ships, with excellent seakeeping characteristics especially in short seas, is the SWATH ship. However, Fast Displacement Catamaran hull forms and Hybrids, deviating from the original SWATH concept as to the smallness of the waterplane area and the underwater hull form, will naturally exhibit worse seakeeping behaviour, at the benefit of increased vertical plane stability. The main design tools for the tuning of the natural periods, to be positioned outside the range of the possible wave encounter periods, are:
-
For the roll natural period: limitation of the transverse metacentric height GMT through the smallest possible10 separation distance of the demihulls and the positioning of heavy loads as high as possible. Maximization of the effective roll radius of gyration by proper mass distribution and shaping of the underwater hull form for increased added mass and moment coefficients. Both latter measures are very difficult to be implemented in practice, due to technical reasons or because of the contradiction to other requirements.
-
For the natural periods in heave and pitch: a fine tuning is possible by limitation of the waterplane area to the extent possible. A concentration of the waterplane area around the center of flotation, leading to short and beamy waterlines, results to a relatively small longitudinal metacentric height GML and relatively high pitch eigenperiod, however at the expense of increased wave resistance, especially at higher Froude numbers. In any case, a large fast catamaran ship with appreciable mass and with small to medium waterplane area will contribute through her mass to reasonable values for the heave and pitch natural periods.
As to the second factor influencing the seakeeping behaviour of a ship, namely the magnitude of the exciting forces and moments, it is well established that ships with bulb-like cross sections will experience reduced wave exciting forces and moments, at least at the so-called “wave excitationless frequencies”11. Again the SWATH type of ship is the best representative of the Fast Displacement Catamaran family fulfilling the above criteria for a hull form with least possible wave excitation impact.
In evaluating the seakeeping behaviour of twin hull vessels alternative quasi 2D (strip or slender body theory approach) and more strict 3D panel methods can be employed. Due to the slenderness of the demihulls of Fast Displacement Catamarans, including SWATHs and Hybrids, the analysis of the seakeeping behaviour in head seas can be easily accomplished by either approach. However, the oblique and beam seas condition requires special care, due to strong interactions between the incident wave and the two demihulls as well as due to three-dimensional effects at the ends. These cases can be successfully approached by 3D panel method, accounting for the forward speed effects in the sense of a slender body theory [14]. For SWATH ships, additional attention should be paid to the following seas case, when at high forward speed, and the vertical plane instabilities due to the action of the so-called Munk moments. Also, the inclusion of the stabilizing fins and the estimation of the estimation of the viscous damping requires additional fine-tuning of the employed computer algorithms. However, these problems are considered solved in a satisfactory way by a variety of researchers, including related work at the Ship Design Laboratory of NTUA, therefore any details can be omitted herein for the sake of brevity.
4.
DISCUSSION OF RESULTS
We concentrate our attention in the following to the assessment of the employed algorithms for the evaluation of wave resistance of Fast Displacement Catamarans with typical hull form characteristics, including SWATHs.
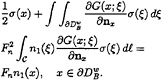
In Fig.212 a comparison between theoretical predictions according to the suggested thin ship theory for symmetric demihulls [10], the presented strict 3D panel source theory and model experiments [21] for the wave resistance coefficient of a catamaran with WIGLEY demihulls (L/B=10.0, B/T=1.6, separation distance s/L=0.5) is shown. The 3D calculation was based on a 2×160 panels/demihull model. The agreement of both theoretical methods to the experimental data is fully
|
10 |
Limit set by the wave interaction resistance. |
|
11 |
see, e.g., Motora, S., Koyama, T., Proc. 6th Symposium on Naval Hydrodynamics, 1996. |
|
12 |
In all following figures, results according to the presented thin ship theory for symmetric and nonsymmetric demihulls are indicated by “2D Calculation”, whereas results of the employed 3D panel source method are indicated by “3D Calculation”. |
satisfactory, except at lower Froude numbers, below 0.35, for which the employed quasi 2D method, as expected for a Michell concept approach, delivers highly oscillatory results. In Fig.3 a qualitative comparison between the simplified thin ship theory (lower part of figure) and the strict 3D panel method (upper part of figure) for the wave pattern of the lower hulls of a SWATH ship (lower hull length to diameter ratio L/D=13.2, draft ratio T/L=0.12, separation distance s/L=0.5) at Froude 0.35 is depicted. The results of both methods are in excellent qualitative agreement, except in the region of the position of the demihulls (from –50 to 0), where some expected deviations exist, due to the simplified thin ship theory concept, that does not allow the inclusion of local interference effects.
In the following figures, the developed thin ship theory method for the wave resistance of twin hull vessels with symmetric or asymmetric demihulls has been applied systematically to a catamaran series with halved WIGLEY demihulls (L/B=10, B/T=1.6, constant displacement), placed alternatively with the wall-side inwards respectively outwards, and in various separation distances (see Fig.4 for definitions, Fig.5 for the wave resistance coefficient, s/L=0.4). The wave interaction resistance was estimated and compared with the equivalent value of a catamaran with symmetric WIGLEY demihulls (Fig.6) and the wave resistance coefficient of the symmetric demihull ( Fig.7). From the above figures it is concluded, that for Froude numbers up to 0.4 the wave interaction resistance changes rapidly and an inwards or outwards located asymmetry of the demihulls might deliver better resistance results, as compared to symmetric demihull arrangements. Considering the whole speed range of interest (Froude between 0.3 and 0.8), it seems that inwards flattened demihull arrangements are, from the wave resistance point of view, superior to the others, what is qualitatively supported by individual model experiments with asymmetric demihulls in the past.
From all the above, it can be concluded, that for twin hull arrangements with slender/thin symmetric or asymmetric demihulls at sufficient large separation distance the employed simplified thin ship theory is quite satisfactory, both for hull form design purposes, as well as for the prediction of various hydrodynamic phenomena related to the ship's wave system. However, it remains to validate the asymmetric demihull case by systematic model experiments, what we plan to do, in the next months, with Wigley demihulls at NTUA's Towing Tank.
In the following figures we present theoretical and experimental results for the horsepower requirement of four optimized Fast Displacement Catamaran hull forms, namely for two designed SWATH ships and two displacement catamarans with hybrid hull form features. In Figs 8 and 9 the theoretical predictions for the effective horsepower requirement of the 1.030 tons displacement SWATH Passenger car ferry design “Aegean Queen” and the 610 tons displacement SWATH Multipurpose Research Vessel SMURV are compared with data from model experiments, performed at the Ship Hydrodynamics Laboratory of NTUA. The particulars of the employed models in scale 1:17 (L=3.0m) respectively 1:17.5 (L=2.0m) can be found in [1] and [5]. The agreement between the employed simplified thin ship theory and the model experiments is good and fully satisfactory, not only for design purposes but also from the actual speed-power prediction point of view. The relative small deviations at higher Froude numbers are due to the observed stern flow separation and the related pressure-viscous resistance, that is not exactly accounted for at the used theoretical model. From the hull form optimization point of view, both vessels have been optimized for specific design and operational constraints, leading to geometrical global and local form limits. Therefore, the hull form of the “Aegean Queen”, optimized for least total resistance at Froude 0.7 is “bottle-like”, considering the fitting of the selected machinery in the rear part of the lower hulls (see Figs 10). On the other side the hull form of SMURV, optimized for a top speed of initially assumed 25.0 knots and a specific operational profile for the cruise and towing condition (15 knots respectively 4.5 knots), given the available machinery horsepower and the main dimensions (overall length, beam and max. draft), is characteristically “bone-like” and of relatively small slenderness ratio (L/V1/3=5.3). In Fig 11, the initially estimated horsepower requirement for alternative hull forms of SMURV, resulting from the global (hull form 0) and local form optimization with different geometrical constraints (hull form 1 and 2), is shown. From the hydrodynamic performance point of view both tested SWATH vessels exhibit the characteristic hump in the horsepower requirement at Froude 0.35, but they are expected to operate, according to their operational requirements, quite distant from this operational point.
In Figs 12 and 13 the corresponding results for two designed fast displacement catamarans are shown, namely the 450 tons displacement passenger
ferry “SIMICAT” and the 2180 tons displacement passenger/car ferry “GOUTCAT”. The last one, a 80m LOA and 22m wide passenger/car ferry13, is built completely from steel, and is currently outfitted for completion in Piraeus-Greece. The model experiments, validating the present theoretical predictions for the horsepower requirement, were performed at the NTUA's Towing Tank (SIMICAT) respectively for GOUTCAT at the Versuchsanstalt f. Wasserbau & Schiffbau, VWS-Berlin. The agreement between the theoretical predictions of the employed simplified thin ship theory and especially the strict 3D source distribution method (number of panels N=2×220/demihull) and the experimental data for SIMICAT is for design purposes very good. Both methods are underestimating the required horsepower requirement at higher speeds, apparently due to insufficient approach of the pressure-viscous resistance resulting from the significant stern flow separation at higher speeds. For the second tested hull (GOUTCAT), exhibiting strong interaction effects between the demihulls, that are quite close together (s/L=0.22), the simplified thin ship theory method fails completely to predict correctly the resistance hump behaviour at Froude 0.35, whereas the 3D source panel method (herein number of used panels N=2×180/demihull) overpredicts the experimental data, but follows very closely the character of the horsepower requirement curve. At higher speeds both theoretical methods deliver acceptable predictions. It is of interest to note, that the hull forms of both vessels, that resulted from a global and local optimization for a top speed, in both cases, of at least 19.0kn (Froude abt 0.50 respectively 0.40) are quite similar. Both hull forms are characterized by long but relatively narrow bow and stern bulbs (see Fig.14, upper part, model of GOUTCAT tested at VWS Berlin, scale 1:16). However, due to the more strict requirement for the overall beam of GOUTCAT, to not exceed 22.0m14, leading to a demihull separation distance of merely 14.5m, the demihull interaction on the wave resistance is herein very strong, especially at Froude numbers between 0.35 and 0.40. Finally, it should be noted, that at design speed of herein 20.0 knots, the wave interaction resistance for GOUTCAT is strongly negative and leads to a decrease of the doubled demihull resistance by 20%15. A view of the GOUTCAT model during the propulsion test at speed v=21 knots is shown in the lower part of Fig. 14.
6.
CONCLUSIONS
The paper addressed the main features of a methodology for the hydrodynamic optimization and systematic hull form development of fast displacement catamarans. The procedure is based on a methodology for the minimization of the calm water resistance, particularly the wave resistance, of slender, twin hull vessels of arbitrary shape, considering their seakeeping performance and various geometric parameters set by design or by other operational constraints. Alternative mathematical models and computer algorithms for the wave resistance of arbitrarily shaped hull forms have been developed and applied herein, namely simplified thin ship theory approaches based on Michell's original source distribution concept but accounting for asymmetries of the slender/thin demihull forms through a doublet distribution and alternatively a 3D panel source method, that is based on the 3D Green function approach and is generally applicable to arbitrary hull forms. The developed theoretical-numerical methods have been applied to the hull form development of a variety of Fast Displacement Catamarans. Comparative theoretical and experimental results for the wave resistance and horsepower requirement of two SWATH ships and two Displacement Catamarans were presented and discussed, considering their overall hydrodynamic and efficiency performance.
|
13 |
The ferry “SUPERCAT-HAROULA” (NTUA code: GOUTCAT) is one of the largest steel catamaran ships ever built world-wide and the first one of this type and size built in Greece. With a transport capacity of 1.500 passengers (summer season)/240 cars and an installed horsepower of 2×6.500 HP, she will have a service speed of abt 21.0 knots. |
|
14 |
The vessel's beam was fixed to the lowest possible limit by design requirements, namely the car-deck arrangements and the reduced structural weight. In addition, the small beam results to a relatively “small” GM value of between 8.20 and 11.05m, depending on the loading condition, and a reasonable eigenperiod for roll of abt 6.0 sec, what contributes greatly to an acceptable seakeeping behaviour for the designed vessel, as compared with other catamaran designs and related concepts. |
|
15 |
This value was at first theoretically predicted and later fully confirmed by the model experiments at VWS Berlin. The propulsive efficiency coefficient ηD, at design speed, is according to the model experiments approximately 75%. |
ACKNOWLEDGEMENT
The reported work was partly supported by several past research projects of the Ship Design Laboratory of NTUA funded by the Greek Secr. General for Research and Technology and Alpha Marine Ltd (Mr. Nikos Daphnias) The authors like to thank Mr. E.Boulougouris, Dr.-Eng. cand., for his assistance in the 3D hull form development and the panel generation for the wave resistance calculations and the staff of VWS-Berlin (Dr.-Ing. B.Müller-Graf) for the excellent experimental work on the hydrodynamic performance of GOUTCAT. Finally, the substantial help of Dr.-Eng. G.Zaraphonitis and Dipl.-Eng. M.Androulakakis in the development of some of herein employed software packages of SDL-NTUA is greatly acknowledged.
REFERENCES
1. Papanikolaou, A., Zaraphonitis, G., Androulakakis, M., “Preliminary Design of a High-Speed SWATH Passenger Car Ferry”, Journal Marine Technology, Vol. 28, 1991, pp. 129–141.
2. Papanikolaou, A., “SIMICAT: Hydrodynamic Analysis and Preliminary Design of a Fast Catamaran For the Greek Islands”, SDL-NTUA Report, December 1994.
3. Papanikolaou, A., et al., “SMUCC: SWATH Multipurpose Container Carrier for Fast Shortsea Shipping ”, Proc. 3rdFAST'95 Conference, Travemünde, 1995, pp. 667–680.
4. Papanikolaou, A., Boulougouris, E., “Hydrodynamic Analysis and Preliminary Design of a SWATH Offshore Patrol Vessel for the Greek Navy”, SDL-NTUA Report, March 1995.
5. Papanikolaou, A., Atlar, M., Khattab, O., “Hydrodynamic Analysis and Preliminary Design of a SWATH Multipurpose Research Vessel for the Mediterranean Sea”, Proc. 2nd FAST'93 Conference, Yokohama, 1993.
6. Turner, H., Taplin, A., “The Resistance of Large Powered Catamarans”, Trans. SNAME, Vol. 76, 1968, pp. 180–213.
7. Papanikolaou, A., “Computer—Aided Preliminary Design of a High-Speed SWATH Passenger Car Ferry ”, Proc. 4th IMSDC'91 Int. Conf., Kobe, 1991.
8. Pigounakis, K., Kaklis, P., Papanikolaou, A., “Ship-Hull Fairing under Shape and Integral Constraints”, Proc. 7th IMAM Congress, Dubrovnik, 1995.
9. Papanikolaou, A., Nowacki, H., “Concept Design and Optimization of a SWATH Passenger/Car Ferry”, Proc. IMAS-89 Int. Conf. on Applications of new Technology in Shipping, Athens, 1989.
10. Papanikolaou, A., Androulakakis, M., “Hydrodynamic Optimization of High-Speed SWATH”, Proc. 1st FAST'91 Conference, Trondheim, 1991.
11. Kaklis, P., Papanikolaou, A., “The Wave Resistance of a Catamaran with Non-Symmetric Thin Demihulls ”, Proc. 1st Nat. Congress on Comp. Mechanics, Athens, 1992.
12. Koskinas, C., “On the Solution of the Neumann-Kelvin Problem by a 3D Panel Source Method and Applications to Catamaran Hull Form Optimization”, Dr.-Eng. Thesis, Progress Report, NTUA-SDL, Jan. 1995.
13. Spanos, D., “Study of the Wave Resistance of Slender Symmetric and Non-symmetric Catamaran Configurations”, Diploma Eng. Thesis, Dep. of Naval Arch. & Marine Eng., NTUA, Athens, Feb. 1995.
14. Papanikolaou, A., Schellin, Th., “A three-dimensional panel method for motions and loads of ships with forward speed”, Journal Schiffstechnik—Ship Tech. Research, Vol. 39, 1992.
15. Lasdon, L.S., Waren, A.D., “GRG2's User's Guide”, Univ. of Texas at Austin, Dep. Of General Business Report, Austin, 1986.
16. Michell, J.H., “The wave resistance of a ship”, Phil. Mag., Vol. 45, London, 1898, pp. 106–123.
17. Eggers, K., “Über Widerstandsverhältnisse von Zweikörperschiffen”, Trans. STG, Vol. 49, 1955.
18. Newman, J.N., “Evaluation of the Wave Resistance Green Function: Part 1—The Double Integral”, Journal of Ship Research, Vol. 31, No. 2, June 1987, pp.79–90.
19. Baar, J.J.M., Price, W.G., “Evaluation of the Wavelike Disturbance in the Kelvin Wave Source Potential”, Journal of Ship Research, Vol. 32, No. 1, March 1988, pp.44–53.
20. Bessho, M., “On the Fundamental Function in the Theory of the Wave-Making Resistance of Ships”, Memoirs of the Defence Academy, Japan, Vol. IV, No. 2, pp. 99–199, 1964.
21. Insel, M., Molland, A.F., “An Investigation into the Resistance Components of High Speed Displacement Catamarans”, Trans. RINA, Vol. 134, 1992.
Appendix A:
The Wave Resistance of Arbitrarily Shaped Thin Catamarans
Consider the potential flow caused by a twin-hull floating body ![]() moving with constant forward speed U on the free surface of an ideal fluid of infinite depth and extent in a uniform gravitational field (g will indicate the acceleration due to gravity). The body
moving with constant forward speed U on the free surface of an ideal fluid of infinite depth and extent in a uniform gravitational field (g will indicate the acceleration due to gravity). The body ![]() (see Fig. 1) is assumed to be thin, i.e., the (common) length L of the two demihulls
(see Fig. 1) is assumed to be thin, i.e., the (common) length L of the two demihulls ![]() is much greater than their (common) beam B. This geometrical assumption can be mathematically formulated by attributing the role of the perturbation parameter
is much greater than their (common) beam B. This geometrical assumption can be mathematically formulated by attributing the role of the perturbation parameter ![]() to the geometrical ratio B/L, that is,
to the geometrical ratio B/L, that is,
B/L=![]() , 0<
, 0<![]()
![]() 1, (1)
1, (1)
and correlating it asymptotically with the ratio T/L—T being the (common) draft of the two demihulls—and the Froude number ![]() which is the fundamental physical non-dimensional parameter of the flow under consideration. In the present work we assume
which is the fundamental physical non-dimensional parameter of the flow under consideration. In the present work we assume
T/L=O(1), Fn=O(1) (2)
with respect to ![]() .
.
We shall restrict our attention to the flow field which is time invariant with respect to a Cartesian system of co-ordinates O![]() 1
1![]() 2
2![]() 3 fixed to the body
3 fixed to the body ![]() with the O
with the O![]() 3 axis going vertically upwards, the O
3 axis going vertically upwards, the O![]() 1
1![]() 2 plane lying on the calm fluid surface and the O
2 plane lying on the calm fluid surface and the O![]() 1 axis pointing to the direction of the motion of the body. With respect to this system of reference, the fluid motion is characterized by the velocity potential
1 axis pointing to the direction of the motion of the body. With respect to this system of reference, the fluid motion is characterized by the velocity potential ![]()
![]() being the region filled by the fluid and bounded by the free surface
being the region filled by the fluid and bounded by the free surface ![]() which is assumed to be a non-parametric surface with respect to the calm fluid surface
which is assumed to be a non-parametric surface with respect to the calm fluid surface ![]() 3=0, namely
3=0, namely ![]() 3=
3=![]() (
(![]() ′),
′), ![]() ′=(
′=(![]() 1,
1,![]() 2). Since
2). Since ![]() the problem of determining
the problem of determining ![]() and
and ![]() (
(![]() ′) can be addressed by regular perturbation theory. Introducing
′) can be addressed by regular perturbation theory. Introducing
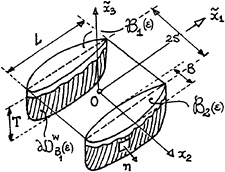
Figure 1: Co-ordinate system and geometry
the non-dimensional variables: xℓ=![]() ℓ/L, ℓ=1,2,3,
ℓ/L, ℓ=1,2,3, ![]() and η(x′)=
and η(x′)=![]() (
(![]() ')/L, and exploiting the fact that, for a thin hull with lengthwise slowly varying shape, the x1-component of its outer normal vector n=(n1,n2,n3) is asymptotically small, namely n1=O(
')/L, and exploiting the fact that, for a thin hull with lengthwise slowly varying shape, the x1-component of its outer normal vector n=(n1,n2,n3) is asymptotically small, namely n1=O(![]() ), we obtain after simple asymptotic reasoning the following result: the velocity potential Φ(x;
), we obtain after simple asymptotic reasoning the following result: the velocity potential Φ(x;![]() ) and the free-surface elevation η(x′;
) and the free-surface elevation η(x′;![]() ) admit of the following asymptotic approximations:
) admit of the following asymptotic approximations:
(3)
(4)
where
(5)
and Φ0(x;![]() ) satisfies the following boundary value problem:
) satisfies the following boundary value problem:
(6)

(7)
(8)
Φ0,ℓ→0, ℓ=1,2,3, x3→ −∞, (9)
and the so-called radiation condition (R): the energy flux associated with the disturbance of the moving body is directed away towards x1→ −∞.
In the above formulae, the subscript ℓ, after a comma, denotes partial differentiation with respect to the space variable xℓ, while ![]() denotes the open domain bounded by the calm fluid surface x3=0 and the demihull centerplanes
denotes the open domain bounded by the calm fluid surface x3=0 and the demihull centerplanes ![]() i=1,2, to which degenerate the wetted surfaces
i=1,2, to which degenerate the wetted surfaces ![]() i=1,2, at the limit
i=1,2, at the limit ![]() =0.
=0. ![]() is represented as
is represented as
x2=–s+![]() f1(x1,x3),x2≥–s,
f1(x1,x3),x2≥–s,
x2=–s–![]() f2(x1,x3), x2≤–s, (x1,x3)
f2(x1,x3), x2≤–s, (x1,x3) ![]() Ω, (10)
Ω, (10)
with Ω being the projection of ![]() onto the centerplane x2=0, and analogously for
onto the centerplane x2=0, and analogously for ![]() Finally,
Finally, ![]() denotes the open planar domain
denotes the open planar domain ![]()
![]() where
where ![]() is the slit representing the degenerate waterline of
is the slit representing the degenerate waterline of ![]() i=1,2.
i=1,2.
Let G(x;ξ), x=(x1,x2,x3), ξ=(ξ1,ξ2,ξ3), be the Green function, also referred to as the Kelvin source, associated with the Laplace field equation (6), the linearized free-surface condition (8), the “bottom” boundary condition (9) and the radiation condition (R). Furthermore, let the separation distance 2s, between the axes of the two demihulls, be large enough so that local interference effects can be neglected. One may argue that this is the case if the geometrical rays, which represent the wave front of the Kelvin wave pattern and emanate from the bow of each demihull, do not intersect with the other demihull. Noting that each of these rays forms an angle of 19.28° degrees with the corresponding demihull axis, we conclude that, for
2s>sin(19.28°)≈0.33, (11)
local interference effects can be neglected. It can then be proved, with the aid of potential theory, that the leading-order potential Φ0(x0; ![]() ) can be approximately decomposed as follows:
) can be approximately decomposed as follows:
(12)
where
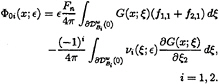
(13)
Here v1(x;![]() ) is the solution of the following Fredholm integral equation of the first kind:
) is the solution of the following Fredholm integral equation of the first kind:

(14)
with the double-dash signifying the so-called principal value of the indicated integral according to Hadamard, and
v2(x1,s,x3;![]() )=v1(x1,–s,x3;
)=v1(x1,–s,x3;![]() ), (x1,x3)
), (x1,x3) ![]() Ω. (15)
Ω. (15)
It is worth-noticing that the kernel K(x;ξ)= ∂2G(x;ξ)/∂x2∂ξ2 of (14) exhibits a non-integrable singularity of the form |x–ξ|–3 and thus one can readily remark that the integral in the right-hand side of (14) can only exist as a principal-value integral. Furthermore, the singularity of K(x;ξ) coincides with that of the kernel of the integral equation which models the three-dimensional Neumann problem for the Laplace equation by using double-layer potentials; see, e.g., Hsiao (1990) [1]. Such equations form the so-called class of hyper-singular Fredholm integral equations of the first kind. Naturally, the question arises whether some other approach would yield a more tractable integral equation for v1(x), say, e.g., a Fredholm integral equation of the second type with weakly singular kernel. As already noted in [1], the answer is negative as a result of the fact that ![]() is a flat surface.
is a flat surface.
An asymptotic approximation of the dipole distribution v1(x;![]() ) can be easily obtained by assuming that the demihulls
) can be easily obtained by assuming that the demihulls ![]() , i=1,2 are not only thin but also a-bit-slender, i.e.,
, i=1,2 are not only thin but also a-bit-slender, i.e.,
T/L=![]() 1,
1, ![]() 1=
1=![]() a, 0<a<1. (16)
a, 0<a<1. (16)
Assume now that v1(ξ1,ξ3) is twice continuously differentiable in Ω and take its two-term Taylor expansion around the point (x1,x3). Substituting this expansion into the right-hand side of (14) and taking into account the following expression for the Kelvin source:
(17)
where Hreg(x;ξ) is the so-called regular part of the Kelvin source, we arrive at an integro-differential equation for v1(x1,x3). After careful asymptotic analysis, one can show that the formula:
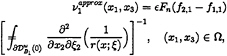
(18)
provides indeed an asymptotic approximation of the solution of this equation. Obviously, analogous results can be drawn for the dipole distribution v2(x1,x3); see (15). Since ![]() is flat, the principal-value integral in (18) can be analytically evaluated over triangular subdomains of Ω.
is flat, the principal-value integral in (18) can be analytically evaluated over triangular subdomains of Ω.
Summarizing the hitherto obtained results we conclude: the flow induced by the steady forward motion, at moderate Froude numbers (see the second estimate in (2)), of a catamaran with thin and a-bit-slender demihulls at sufficiently large separation distance (see (11)), can be modelled, to the leading order of approximation with respect to the small parameters ![]() and
and ![]() 1, by two singularity distributions over the centerplane of each demihull, namely a Kelvin-source and a normal Kelvin-dipole distribution (see (12), (13) and (18)).
1, by two singularity distributions over the centerplane of each demihull, namely a Kelvin-source and a normal Kelvin-dipole distribution (see (12), (13) and (18)).
These singularity distributions being known, the wave resistance of the catamaran can be easily calculated by appealing to the well known Kochin's formula; see Wehausen and Laitone (1960, §20) [2]. More analytically, the Kochin's function H(k,θ) takes in this case the following form:
H(k,θ=2[P(k,θ)+iQ(k,θ)], (19)
where
[P or Q](k,θ)=[P or Q]σ(k,θ)–[P or Q]v(k,θ), (20)
and
(21)
(22)
with σ=![]() (f1,1+f2,1) and
(f1,1+f2,1) and ![]() (see (18)). After triangulating Ω and approximating σ(x1,x3) by a piecewise linear and
(see (18)). After triangulating Ω and approximating σ(x1,x3) by a piecewise linear and ![]() by a piecewise constant interpolant, over the constructed triangulation, the double integrals, appearing in the right-hand side of (21)–(22), are evaluated analytically.
by a piecewise constant interpolant, over the constructed triangulation, the double integrals, appearing in the right-hand side of (21)–(22), are evaluated analytically.
Appendix B:
The Wave Resistance of Arbitrarily Shaped Catamarans
In this appendix we describe a method for evaluating the wave resistance of a steadily moving catamaran with arbitrarily shaped demihulls. In this case, the perturbation potential φ(P) can be represented as
(1)
where ![]() denotes the wetted surface of the floating body and C denotes the intersection of
denotes the wetted surface of the floating body and C denotes the intersection of ![]() with the undisturbed free surface x3=0. Substituting (1) into the body boundary condition we arrive at the following Fredholm integral equation, of the second kind, for the unknown density σ(x) of the Kelvin sources G(x;ξ):
with the undisturbed free surface x3=0. Substituting (1) into the body boundary condition we arrive at the following Fredholm integral equation, of the second kind, for the unknown density σ(x) of the Kelvin sources G(x;ξ):
(2)
The above equation is solved numerically by a panel discretization method, which approximates the wetted surface of the catamaran by a sufficiently dense mesh of planar panels (triangles or quadrilaterals). The density σ(x) of the Kelvin-source distribution is assumed constant in each of these panels. Then, the discretization of (2) results into a system of linear equations, whose matrix M consists of the so-called influence coefficients Mij.
The efficient and robust evaluation of the influence coefficients is directly connected with the efficient calculation of the Kelvin source G(x;ξ) and its partial derivatives. It is well known that G(x;ξ) can de written as the sum of three, qualitatively different, components. The first component represents the velocity potential of a Rankine source located at x=ξ. The second component represents the velocity potential of a local non-oscillatory disturbance, which is symmetric with respect to x1–ξ1, while the third component contributes only to the downstream (x1→–∞) behaviour of G(x;ξ), where it exhibits a strong oscillatory behaviour. The double integral of the second component is evaluated by a technique introduced by Newman (1987), whereas the oscillatory term is evaluated according to the method of Baar and Price (1988); see items [18] and [19] in the main reference list. Once the influence matrix has been obtained and the associated system is solved, we appeal to (1) for evaluating the velocity potential as well as any other field quantity of interest (velocities, pressure, wave profiles). In fine, the wave resistance, trim and sinkage of the catamaran are calculated by direct numerical integration of the pressure over the wetted surface of the floating body.
References
[1] Hsiao, G.G., “Solution of Boundary Value Problems by Integral Equations of the First Kind—An Update”, Center for the Mathematics of the Waves, TR-90–16, 1990, Dept. Mathematical Sciences, Univ. Delaware, Newark.
[2] Wehausen, J.V., and Laitone, E.V., “Surface Waves”, Encyclopaedia of Physics, Vol. 9, Springer Verlag, Berlin, 1960, pp.446– 778.
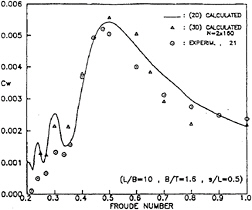
Fig. 2 Comparison of the wave resistance coefficient for a catamaran with Wigley demihulls
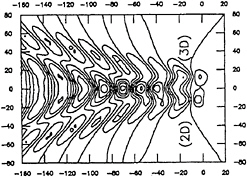
Fig. 3 Comparison of the wave pattern of the lower hulls of a SWATH ship
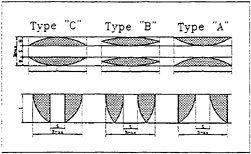
Fig. 4 Definition of equivalent symmetric and asymmetric WIGLEY twin-hulls
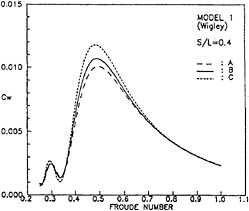
Fig. 5 Wave resistance coefficients of symmetric and asymmetric WIGLEY twin-hulls
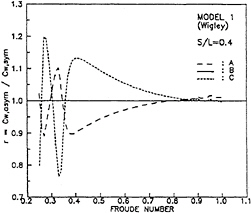
Fig. 6 Influence of asymmetry on the wave resistance of WIGLEY twin-hulls
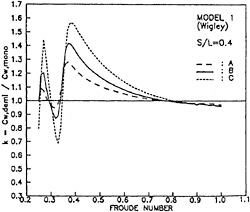
Fig. 7 Interaction wave resistance coefficient of symmetric and asymmetric WIGLEY twin-hulls
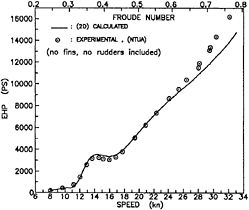
Fig. 8 Comparison between theoretical predictions and model experiments for the Effective Horse Power of AEGEAN QUEEN
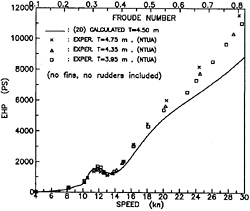
Fig. 9 Comparison between theoretical predictions and model experiments for the Effective Horse Power of SMURV
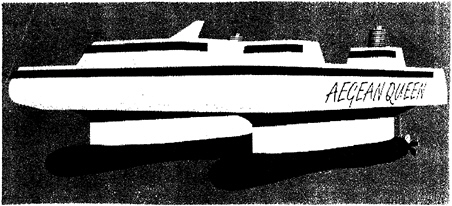
Fig. 10 3D rendering of high-speed SWATH passenger/car ferry AEGEAN QUEEEN
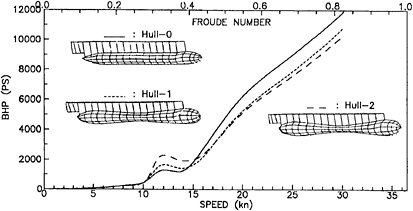
Fig. 11 Alternative SMURV Hull Forms optimized for v=25 kn
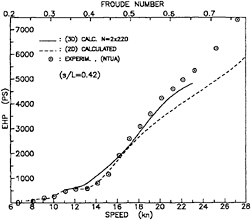
Fig. 12 Comparison between theoretical predictions and model experiments for the Effective Horse Power of SIMICAT
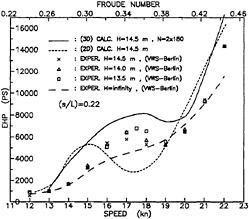
Fig. 13 Comparison between theoretical predictions and model experiments for the Effective Horse Power of GOUTCAT

Fig. 14 View of GOUTCAT model tested at VWS Berlin upper part: model in scale 1:16 (LOA=4,928m) lower part: propulsion test at design speed (v=21 knots)
DISCUSSION
L.J.Doctors
University of New South Wales, Australia
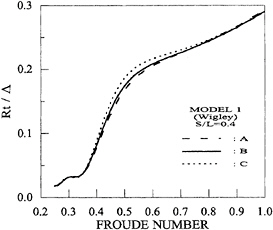
Could the author kindly clarify the definition of the wave-resistance coefficient employed in Figure 5? Usually the wetted-surface area appears in the denominator of the definition of this coefficient. In that case, since the wetted area will be slightly less for Type B twin-hull than for Type A and Type C, the relative performance (in terms of resistance rather than resistance coefficient) will be altered to some degree.
AUTHORS' REPLY
In response to the question raised by Dr. Doctors, the authors would like to clarify that the depicted wave resistance coefficients are defined in the common way, namely with reference to the wetted surface area. Because of the slenderness of the studies hulls, the differences in the wetted area between Type B twin-hull and Type A or C, which all have the same displacement, are very small, therefore the results change very little. In any case, for the sake of completeness, we include below a graph of the ratio of total resistance divided by displacement indicating the relative performance of the three types of twin-hulls over the studies Froude range.
DISCUSSION
H.Nowacki
Berlin Technical University, Germany
My compliments to the authors for a valuable contribution to the hydrodynamic optimization of multihull ships. Their computational methods are showing encouraging agreement with experiments and hence are becoming a trustworthy tool for design studies. Such methods are almost indispensable for design, since it is evident that the multiparametric variety of multihull configurations and shapes cannot possibly be explored by experiment alone.
I should like to raise three design-related questions:
-
On hull separation: The paper alludes to the significance of hull separation on wave resistance interference, a well-known, often non-monotonic effect, but it does not give much practical evidence on it. Clearly a less than optimal separation may save hull weight. Does the authors' experience suggest that the resistance penalty for non-optimal separation may be of such magnitude that it would outweigh the weight savings?
-
On asymmetric demihulls: One would like to understand why the shape with flat inside should be more advantageous at high Froude numbers than the other two. Is it in part because the “effective” separation is increased when the hull mean line is curved outward? Or is perhaps a genuine camber effect creating favorable wave interference patterns that cannot be produced without curved mean lines? In short and in terms of an analogy, is the phenomenon mainly a “thickness/distance” effect or a “camber/curvature” effect? In any case, the results beg for an explanation.
-
On SWATH vs. displacement catamarans: In the Froude number range around 0.4, SWATH and FDC may be competitors. It would be of interest to see dimensionless comparisons of RT/Δ versus Froude number for the four comparison designs. It is such a rare opportunity to be able to compare “optimized” catamarans and SWATH vessels.
Again, my appreciation for a very interesting paper.
AUTHORS' REPLY
The authors would like to thank Professor Nowacki for his very valuable, design-oriented questions. In response to the first raised question, namely on the often non-monotonic effect of hull separation on the wave resistance of displacement catamaran vessels, we would like to confirm that at intermediate Froude numbers (namely for Froude between about 0.3 and 0.45) the interference resistance depends strongly both on hull separation and on the demihull displacement distribution (including any asymmetry, see, e.g., Fig. 15 and Fig. 16).1 At higher Froude numbers hull separation becomes less and less important. The resistance penalty for non-optimal separation can, in fact, outweigh weight savings, but a good designer should be looking for the optimal displacement distribution of the demihulls, assuming the hull separation as close as possible, what should automatically ensure least structural weight and acceptable seakeeping behavior (least possible GM value).
In response to the second question, we would like to note that at high Froude numbers (above 0.6) in fact all demihull forms (inward and outward flattened WIGLEY hulls and symmetric ones) tend to deliver similar results (see Fig.5 and Fig.16), but in accordance to the reply to the previous question, the general interaction phenomenon is a complex “thickness/distance” and “camber/curvature” effect that has to be studied carefully for the Froude number in question.
Finally, as to the last qualitative question, we prepared in response Fig.17, showing that at Froude around 0.4, the two designed displacement catamarans are superior to the two SWATHs. This is not surprising since the catamarans have been purposely optimized for exactly this Froude range, namely around 0.4, whereas the SWATH Aegean Queen has an intended service at Froude number 0.7. Finally the SWATH SMURV (oceanographic vessel design) is herein not a real competitor to the others because of several design constraints that limited severely her geometry (see, however,
|
1 |
These figures show the experimental values for the total resistance coefficient that is more relevant to the vessel design. It should be noted that the wetted surface (and frictional resistance) of the asymmetric WIGLEY demihulls (type A and C) is higher than that of the “equivalent” symmetric demihull of equal displacement (type B). |
Fig.11, the results for the required horsepower of alternative SMURV hull forms when optimized without significant geometry constraints).
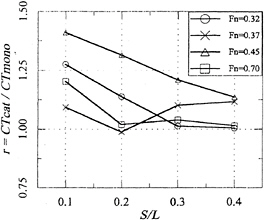
Fig. 15 Influence of separation distance on the total resistance coefficients of symmetric WIGLEY demihulls (L/B=10, B/T=1.6, exp. results [21])
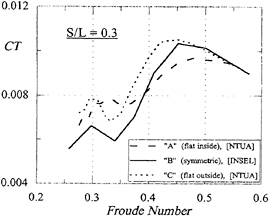
Fig. 16 Influence of asymmetry on the total resistance of WIGLEY demihulls (L/B=10, B/T=1.6, s/L=0.3, exp. results NTUA and [21])
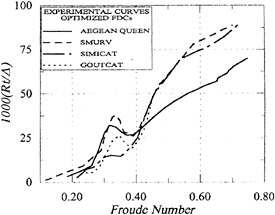
Fig. 17 Resistance/displacement ratio of optimized FDCs and SWATHs (exp. results NTUA and VWS Berlin)


















