
| This page in the original is blank. |
Intelligent Information for Transportation Management
CHRISTOPHER M. POE
Texas Transportation Institute
College Station, Texas
Urban congestion continues to be a leading problem in cities across the country. The inability to move people and goods within the transportation systems causes delays, lost productivity, and increased product costs. The average cost of this congestion for each of the 50 largest urban areas is over $1 billion per year (Lomax and Schrank, 1996). Future urban transportation systems will not focus on constructing new streets and highways but rather on improving the operation of existing ones. This will be accomplished, in part, with the application of advanced technologies to transportation—termed intelligent transportation systems (ITS).
How we operate today's transportation system is a function of institutional arrangements, jurisdictional boundaries, and funding procedures. Users of a transportation system, however, do not care who operates the facility or in whose city the facility is contained. The travelers on a system are concerned about getting to their destinations safely and quickly. The development of ITS has opened up new ways of managing and operating transportation systems, especially between agencies. The deployment of ITS technologies has also resulted in more devices within an infrastructure being capable of collecting more data. Many public-sector agencies find themselves overwhelmed by the amount of data. The key to improving transportation system management is turning the data into useful information.
A simple definition of intelligent information is providing the right information, at the right place, at the right time. The challenge is defining the right information from both an operator's and a user's perspective and delivering that information where it can be used in a timely fashion. In addition, intelligent information is information that can be used for multiple applications,
reducing the need to collect data redundantly. Once collected, data should be used and reused for applications that can benefit from this information.
Developing and Deploying Its
The federal government has been working with state and local governments, private industry, and academia to develop and deploy ITS. There exists a national ITS architecture to guide the development of ITS and several deployment initiatives around the country.
National ITS Architecture
The U.S. Department of Transportation sponsored the development of a national ITS architecture. The goal of the architecture is to establish a framework by which intelligent transportation systems can be designed for interoperability and connectivity between ITS components. The architecture defines the functions that must be performed, the physical entities where those functions reside, the interfaces/information flows between physical entities, and the requirements for actual physical communications channels over which the information flows travel (U.S. Department of Transportation, 1997). This level of detail helps transportation system operators determine how data can be used for additional applications.
The architecture also functionally divides ITS service options into 40 market packages grouped into the broad categories of advanced traffic management systems (ATMS), advanced public transportation systems (APTS), advanced traveler information systems (ATIS), advanced vehicle safety systems, commercial vehicle operations, emergency management, and planning.
Advanced Traffic Management And Information Systems
While the national ITS architecture identifies advanced traffic management systems and advanced traveler information systems, the California Department of Transportation has been promoting the idea of advanced traffic management and information systems (ATMIS). Recognizing these together reflects the true interrelationship of these subsystems. An ATMIS uses traffic monitoring, communications, and control devices to more efficiently allocate available capacity to traffic demand and to communicate traffic information to travelers. The current state of the practice is illustrated in Figure 1.
The ATMS includes both the freeway system and the surface street system with signalized intersections. Transportation agencies are typically installing inductive loop detectors (ILDs) and closed-circuit television (CCTV) cameras to collect traffic conditions. On freeways, individual lane control signs and ramp meters are used to control the flow of traffic onto and through
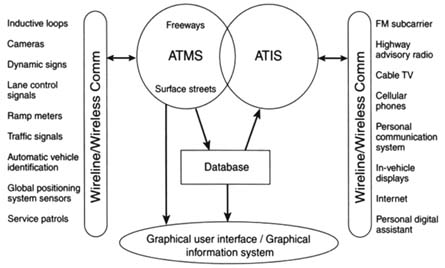
Figure 1 Advanced traffic management and information system.
Source: Texas Transportation Institute.
the freeway system. On the surface street system, traffic signals are used at intersections to allocate capacity to the expected traffic flows. Some field devices, such as dynamic message signs and highway advisory radio, are used to communicate traffic information to aid managing traffic demand. Operators in a transportation management system interact with the ATMS software through a user interface that may be tied to a geographical information system. The storage of data, however, is less common and is highly variable between centers.
The ATIS uses a host of ITS technologies to communicate to travelers information derived from an ATMS. With advances in ITS technologies, both cost and convenience of receiving traveler information are improving.
Its Data Management System
The deployment of ITS technologies in urban areas has resulted in the potential to generate considerable information on traffic conditions. The ability to collect, store, manage, and make available this information can be described as an ITS data management system. The concept of an ITS data management system is depicted in Figure 2.
The current functions being performed by transportation management centers, such as freeway control, incident management, and traveler information, are basically acting on real-time information. When an ATMS detects con-
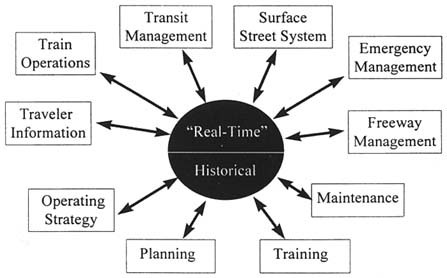
Figure 2 ITS data management system. Source: Texas Transportation Institute.
gestion that is due to demand exceeding capacity or an incident, operators can implement a new traffic control strategy and disseminate information to travelers. The objective behind an ITS data management system is to store these data for developing future operational strategies, performing maintenance activities, training operations personnel, and planning future improvements to the system.
Applications with Real-Time Data
Real-time information is primarily available through ILDs and probe vehicles in the traffic stream. ILDs typically obtain lane-by-lane speed, volume, and loop occupancy at a given point on a roadway. Loop placement is usually between one-third and one-half mile. While this is a fairly dense deployment, there is considerable variability in speed between sensors. Probe vehicle data can gather travel time along segments of roadways and help provide more reliable information about conditions over longer segments of roadway. Probe vehicle data can be gathered with toll collection systems by tracking toll tags or with automated vehicle location systems used on vehicle fleets such as transit buses.
At the same time, most transportation management center have CCTV systems that provide high-quality video feeds from selected points on the system. ILDs and probe vehicles can detect when traffic conditions are degrading. The CCTV cameras are used primarily to verify incidents. The
ability to detect, respond to, and clear incidents faster is already showing significant benefits in urban areas. For example, in Houston, Texas, the deployment of ITS technologies for the city's incident management system has resulted in shorter durations of incidents and less associated congestion and secondary accidents.
Another concept, highlighted in Figure 2, is broadening advanced traffic management beyond highways and streets to include public transit, railroad, and emergency service operations. By integrating these subsystems, real-time information can pass between agencies to improve the effectiveness of providing other services. For example, by blocking highway-railroad grade crossings, train activity in an urban area disrupts surface street operations. Information about these blocked crossings can be shared with emergency service providers in real time to dynamically reroute the vehicles to the fastest route, not necessarily the shortest route. The right place to receive this information is at the station before an emergency vehicle leaves for an incident because the greatest number of options are still available for route selection.
Application with Historical Data
The ability to store real-time data from these data-gathering systems creates the potential for an information-rich environment. Currently, there is considerable variability in the format for storing data. The advantage of an ITS data management system is the ability to ''mine" the data for specific information on the operation of the transportation system. Performance measures related to efficiency and quality of service provide valuable information for both operators and planners.
Performance measures can be divided into three types: point measures, link-based measures, and corridor or system measures. Point-based measures include spot speed and volume (either vehicle or, more appropriately, person). Link-based measures are usually only a piece of a longer trip along a transportation facility. These measures could be travel time, average speed, or delay. Corridor measures are the largest aggregate level of ITS data but are very important to start evaluating how the system is performing throughout the day and from day to day. These measures may be average person speed, person delay, person miles of travel, or person hours of travel.
Conclusion
ITS is a tool for better operating and managing of transportation systems. The deployment of ITS technologies has created a data-rich environment to assist transportation professionals in their daily activities. The challenge will be to efficiently use the data in intelligent ways to operate the system as a truly multimodal, seamless transportation system. In addition, the data from
ITS will allow for the calculation of system or corridor performance measures. These measures of effectiveness improve operational planning, future system planning, and the deployment of ITS technologies.
References
Lomax, T., and D. Schrank, 1996. Urban Roadway Congestion—1982 to 1994. Volume 1: Annual Report. Report No. 1131–9. College Station: Texas Transportation Institute.
U.S. Department of Transportation (USDOT). 1997. The National Architecture for ITS: A Framework for Integrated Transportation into the 21st Century. Washington, D.C.: USDOT.
Automated Highway Systems
AKASH R. DESHPANDE
University of California
Berkeley, California
Forty thousand people are killed each year and 1.7 million are injured in automobile accidents on U.S. highways. The annual cost to the nation is estimated to be more than $150 billion.
Seventy percent of today's peak-hour traffic is in congestion. The number of vehicles caught in congested traffic will double by 2010 unless there is a major improvement in the transportation system. The annual loss of productivity due to traffic congestion is estimated to be more than $50 billion.
In 1991 Congress enacted the Intermodal Surface Transportation Efficiency Act to improve safety and reduce congestion on the nation's highways. In response to a provision of that act, the U.S. Department of Transportation solicited applications in 1993 for a research and development program leading to a prototype automated highway system (AHS). The National AHS Consortium (NAHSC), formed in 1994, prepared the winning proposal to develop the prototype AHS.
The NAHSC consists of nine core participants and over 120 associate participants. The core participants are Bechtel, the California Department of Transportation, Carnegie Mellon University, Delco Electronics, General Motors, Hughes Aircraft, Lockheed Martin, Parsons Brinckerhoff, and the University of California at Berkeley's California Partners for Advanced Transit and Highways (PATH) program. The associate participants represent nine stakeholder communities: (1) state and local government agencies, (2) transportation users, (3) transit authorities, (4) environmental interests, (5) highways designers, (6) the vehicle industry, (7) the electronics industry, (8) commercial trucking interests, and (9) the insurance industry.
Japan and Europe have initiated similar public-private partnership programs
for AHS development. The Japanese Ministry of Construction launched a program with 24 private industry members with the goal of deploying the first AHS highway in Japan in 2010. This program consolidates and continues the ongoing Road/Automobile Communication Systems project, the Advanced Mobile Traffic Information and Communication System project, and the Vehicle Information and Communication Systems project. Activities in Europe include the Program for European Traffic with Highest Efficiency and Unprecedented Safety project, the Dedicated Road Infrastructure for Vehicle Safety in Europe project, the Promote-Chauffeur project, and the Praxitele project.
Research on automated highway systems predates formation of the NAHSC. Work between 1940 and 1970 focused on mechanical control systems such as underground cables and electrical relays. Arrival of microprocessors in the 1970s spurred the development of electronic control systems for the different vehicle functions. Integrated circuits and signal-processing technologies greatly expanded the availability and reliability of sensing and actuation devices used in vehicle control. From the late 1980s through the early 1990s, several research institutions, including California PATH and Carnegie Mellon University, and several automobile manufacturers demonstrated automatic lateral and longitudinal control of vehicles. Today's fully automated vehicles can operate at highway speeds under the control of a single personal computer.
AHS Concepts
As part of the concept development effort, the NAHSC determined that AHS concepts can be characterized in terms of the following six attributes:
Distribution of intelligence. This attribute pertains to the allocation of information and control to the different parts of the transportation system. It has the following range of choices:
- Autonomous: all information is entirely within each vehicle.
- Cooperative: vehicles communicate their information to each other following well-defined protocols.
- Infrastructure supported: the highway infrastructure supports the AHS operation by gathering information using special sensors and communication devices and by providing information back to vehicles using special signage and communication devices.
- Infrastructure managed: the highway infrastructure provides not only information but also commands to control the aggregate behavior of the AHS.
- Infrastructure controlled: the highway infrastructure provides detailed commands to control the behavior of individual vehicles on the AHS.
Separation policy. This attribute pertains to the manner in which vehicles maintain spacing on the highway. It has the following choices:
- Free agent: each vehicle individually maintains a safe distance from any vehicles around it.
- Platoon: vehicles within a platoon cooperate in order to maintain close spacing between each other, while different platoons maintains safe distances between each other.
- Slot: each vehicle is assigned a moving space-time slot on the highway by the infrastructure.
Mixed traffic. This attribute pertains to the mixing of fully automated, partially automated, and manual vehicles in the same lane. It has the following choices:
- Dedicated lanes with continuous physical barriers.
- Dedicated lanes with some gaps in the physical barriers.
- Dedicated lanes with virtual barriers.
- Full mixing of traffic.
Mixed vehicle classes. This attribute pertains to the mixing of different vehicle classes such as light-duty passenger vehicles, trucks, buses, and articulated trucks in the same lane. Concepts may allow or disallow mixed vehicle classes.
Entry/exit design. This attribute pertains to the special characteristics of entries and exits of the AHS. It has the following choices:
- Dedicated ramps to dedicated lanes.
- Transition lanes next to dedicated lanes.
- Identical to today's entry and exit designs.
Obstacle handling. This attribute pertains to the manner in which the system detects obstacles and maneuvers to avoid them. It has the following choices:
- Manual sensing and avoidance.
- Automatic sensing and manual avoidance.
- Automatic sensing and automatic avoidance.
From about a thousand possible combinations of these concept attributes, the NAHSC chose 23 meaningful alternatives for further evaluation. These concepts were analyzed for safety, throughput, cost, flexibility, and acceptability. Three major concept architecture families emerged from this analysis for further study:
- Autonomous vehicles. This concept family focuses on vehicle-centered development to maximize system performance with minimal assitance from the infrastructure.
- Cooperative vehicles. This concept family adds vehicle-to-vehicle communication to autonomous vehicles, thereby providing shared control infor-
- mation. Vehicle-to-vehicle communication is likely to require infrastructure assistance with respect to communication channel allocation and media access services.
- Infrastructure-supported platoons. This concept family adds infrastructure modification to cooperative vehicles to support tighter coordination and control for platooning operation. This concept family has the potential to address both safety and congestion in a radically significant manner.
These three concept families identified for further development also form a deployment timeline, with cooperative vehicles succeeding autonomous vehicles and platooned vehicles succeeding cooperative vehicles. Accordingly, in the short term we will see the commercial availability of vehicle-centered technologies such as adaptive cruise control, front collision warning, front collision avoidance, and lane keeping. Full automation is likely first to emerge in specialized transportation niches such as automation of port operations, truck fleets, and snow plows, before reaching the general consumer market.
Seven specific concepts from these three concept families were demonstrated by the NAHSC during a technical feasibility demonstration in August 1997. NAHSC's concept development, analysis, and demonstration activities were supported by specially developed simulation and analysis tools and specially designed sensor and actuator technologies. There was significant activity on the institutional and societal aspects through stakeholder relations.
Platoon Operation
Of all the AHS concepts, platooning offers a radically different solution for improving safety and reducing congestion. This architecture proposes a strategy of grouping several vehicles as they travel along a highway. The separation of vehicles within a platoon is small (2 to 6 m), while separation of platoons from each other is large (40 to 60 m). The movement of vehicles is realized through simple maneuvers—joining two platoons to form a larger platoon, splitting one platoon into two smaller ones, single-vehicle lane change, AHS entry, and AHS exit.
The platooning concept uses fully automated vehicle operation in an infrastructure-supported context, without mixed traffic. It requires a modification to the entry and exit design of the highways. The automation strategy of the platooning architecture is organized in a control hierarchy with the following five layers:
- Physical layer. The physical layer consists of the automated vehicles themselves. The vehicle dynamical models are given in terms of nonlinear ordinary differential equations.
- Regulation layer. The regulation layer consists of the sensors, actuators, and control systems responsible for safe execution of simple maneuvers
- such as joining two platoons, splitting a platoon, single-vehicle lane change, AHS entry, and AHS exit. Control laws are given as vehicle state or observation feedback policies for controlling vehicle dynamics.
- Coordination layer. The coordination layer consists of the communication protocols that vehicles and highway segments follow to coordinate their maneuvers to achieve high capacity in a safe manner. The protocols are given in terms of finite state transition systems.
- Link layer. The link layer consists of the control strategies that highway segments follow in order to maximize throughput. Control laws are given as traffic state and observation feedback policies for controlling highway traffic using activity flow models.
- Network layer. The network layer consists of end-to-end routing, so that vehicles reach their destinations without causing congestion. Control laws are given in terms of fluid flow and queuing models.
The physical, regulation, and coordination layers reside on each vehicle, and the link and network layers reside on the roadside. To avoid single-point failures and to provide maximum flexibility, the design proposes distributed multiagent control strategies. Each vehicle and each highway segment is responsible for its own control. However, these agents must coordinate with each other to produce the desired behavior of high throughput and safety.
Magnetic markers are buried 0.5 inches underneath the road surface along the center of each automated lane at intervals of 4 feet. These magnets are used as a reference for the lateral control of vehicles. The magnetic reference works under all weather conditions and can withstand nominal maintenance of the road surface. It is possible to embed a binary code along the lane by arranging the polarities of the magnets. Roadway geometry information such as curvature, grade, and banking can be encoded in the markers using such a code.
Vehicles are equipped with radar, six magnetometers, and radio communication transceivers. The radar measures the range and the range rate to the vehicle in front. The magnetometers, three in front and three in the rear, measure the deviation of the vehicle from the center of the lane. Their differential readings can be used to deduce road curvature and vehicle yaw rate. The radio transceivers are used to communicate the lead vehicle speed and acceleration to all the vehicles in the platoon. Radio communications are also used to communicate faults or other emergency situations. The accuracy of longitudinal control is within 20 cm, and the accuracy of lateral control is within 10 cm.
Platooning relieves congestion by increasing highway capacity two-to threefold. It enhances safety through improved communication, coordination, and control. Surprisingly, it is also intrinsically safe since collisions between different platoons can be avoided because of the large separations between
them, and when there is a collision between vehicles within a platoon, it is likely to be a low-impact one because of the close spacing. Platooning has significant benefits with respect to fuel economy and emissions, reducing fuel consumption by almost one-half because of smooth traffic flow and reduced air resistance. Rider response has shown that platooning is comfortable for passengers because its tight control performance inspires confidence.
Other marker and sensor technologies for vehicle control have been developed and tested. These include vision-based lateral control, scanning laser-and radar-based range measurement and obstacle detection, and radar-reflective metallic stripes on roadways.
Conclusion
From an engineering perspective, the AHS program has several important and rare features. It has a profound impact on the day-to-day lives of virtually all individuals and on society as a whole. It brings together diverse engineering fields—civil, mechanical, electrical, and computer engineering. It involves diverse institutions representing a wide range of public and private concerns. It opens rewarding research and development areas in the context of a concrete application. It poses institutional challenges with respect to the deployment of AHS technologies.
The August 1997 NAHSC demonstration firmly established the technical feasibility of the different AHS technologies. Remaining institutional and technical challenges to AHS deployment will likely be resolved over the next decade.














