
9
Behavior Moderators
INTRODUCTION
Previous chapters have reviewed the current state of the science and state of computational modeling regarding various human characteristics with a view to identifying ways in which models of human behavior in military simulations could be made more realistic and therefore more useful. The analysis has covered basic human mechanisms associated with attention and multitasking, memory and learning, decision making, situation awareness, and planning. This chapter examines the role of a class of variables we refer to as behavior moderators and how such variables might be used in engagement simulations. These are the individual difference variables (e.g., task stress, emotion) about which the least is known, so that they cannot at this point be encoded directly into a model. Until sufficient information about the structure and function of these variables is obtained, one approach is to introduce them by assigning values to parameters of various behavior models on the basis of informed judgment. Tentatively, such values could, for example, shift the probabilities associated with a range of responses generated by the triggering of a production rule.
There are a number of important questions to be addressed about variables that moderate behavior. For example, what is the desirability and feasibility of developing models of humans that vary with respect to personalities, emotions, cultural values, skills, and intellectual capabilities? How is behavior influenced by external stressors such as extremes in temperature, long hours of continuous work, and exposure to toxins? Can the effects of fear and fatigue on soldier performance reasonably be represented? At the unit level, what are the effects on performance of average level of training, the extent to which standard operating
procedures are followed, and the degree of coupling between procedures? Although there is some discussion of unit-level behavior moderators in this chapter, the focus is primarily at the individual level.
Interest in incorporating moderator variables such as task stress into military engagement simulations emerged in the late 1960s (Kern, 1966; Siegel and Wolf, 1969). In retrospect, these efforts were probably ahead of their time. For example, Siegel and Wolf's single-operator model incorporated a complex amplifying interaction between the level of operator capability and performance degradation due to time stress. Likewise, their multiperson model included such features as the costs of coordination as a function of the relative appropriateness of task allocation to team members. One of the factors that probably inhibited rapid elaboration of their models was the limits of computer capacity at that time.
There was renewed interest in moderator variables in the late 1980s. All branches of the military services supported associated research and system development efforts (for Army-supported efforts, see Van Nostrand, 1986; for Air Force programs, see Davis, 1989). Van Nostrand in particular opened several useful lines of inquiry. For example, she undertook to assemble and interpret data from Army field exercises that characterized the decline in soldier performance as a consequence of continuous operations, fatigue, and fear. In this regard, she was among the first to see the potential contribution of empirical data on soldier behavior under stress conditions to the development of a computational model of human behavior under battlefield conditions.
Van Nostrand also gave some quantitative specificity to the idea that morale can influence performance. She noted from various sources of military data that specific conditions, such as extremes in temperature, noise, the rate of friendly casualties observable by individual soldiers, and the turnover rate among unit members, had specific adverse effects on both individual and unit performance. Her work represents an attempt to examine and assess the state of the data from military studies on the relationship between external stressors and human behavior on the battlefield.
Davis' work at the RAND Strategic Assessment Center (1989) had a broader scope—incorporating theater-wide, strategic operations. This work was conducted in response to the hypothesis of military historians (see, e.g., Woldron, 1997) and users of war games that observable variations in large-unit performance can be linked to the character of commanders or the philosophical directives of particular cultures (see, e.g., Bennett et al., 1994).1 Davis' work addressed three broad factors: (1) fighting quality (different forces with equivalent equipment), (2) the friction of actual combat, and (3) the processes of command decision making in a particular political climate.
Davis introduced these factors into strategic simulations by applying weights to standard quantitative indices of performance. The weights were derived from estimates of characteristics such as level of unit training, level of logistic support, and whether a combat unit was defending its home territory or fighting on foreign ground. These early models were simple and based mainly on common sense; however, as results from psychological research studies and feedback from simulation became available, these primitive models were elaborated and refined.
More recently, several investigators (Lockett and Archer, 1997; Allender et al., 1997a; Hudlicka, 1997; Fineberg et al., 1996) have worked toward developing computational models that incorporate some of these moderator variables. In her work on MicroSaint and IMPRINT (improved performance integration tool), Archer (1997) has built on Van Nostrand's efforts by introducing the effects of various levels of environmental stressors (such as heat, cold, and the presence of toxins [Anno et al., 1996]) into computational models representing human behavior (see also Conroy and Masterson, 1991). Fineberg and colleagues (1996) have demonstrated, in the context of a military exercise, a model that incorporates the level of anxiety for dismounted infantry confronted with indirect fire. In this model, behaviors such as taking a prone position, moving while prone, and returning fire are affected by the frequency of incoming rounds, the pattern of intermittency, the apparent caliber of the rounds, and their proximity. These latter factors are linked to various anxiety levels. Hudlicka (1997) has proposed a general approach to modeling the effects of a wide range of individual differences, including cognitive styles, individual preferences, training, personality, and emotion; the approach moderates specific components of the overall cognitive architecture so as to indirectly affect explicit behavioral outcomes.
There are many behavior moderators and many human behaviors that might be influenced by these moderators. Examining them all is beyond the scope of this chapter. Our intent here is to select a subset to illustrate the current state of knowledge in this area. Based on our review, we believe these variables have the potential to impact the performance of soldiers and commanders in the field and therefore should be considered for further development. We address two broad categories of moderators: those that are imposed on the human externally and those that are part of the human's internal makeup. External moderators include physiological stressors (e.g., heat, toxins, noise, vibration), physical workload and fatigue, and cognitive/task workload. Internal moderators include such factors as intelligence, level and type of expertise, personality traits, emotions/affective factors, attitudes/expectancies, and cultural values. Each of these moderators may have both positive and negative effects, depending on the value of the variable. For example, soldiers who received high scores on the military entrance examination and have the required expertise will probably perform better than soldiers who received lower scores on the entrance examination or have had less training.
The following sections provide a review of the major moderator variables—
external and internal—in terms of what is known about their effects on human behavior. This review is followed by a discussion of efforts to build computational models incorporating these variables. The final section presents conclusions and goals in the area of behavior moderators.
EXTERNAL MODERATORS OF HUMAN BEHAVIOR
Most of the behavior moderators that originate outside the human are stressors and as a result have a negative influence on performance. For example, if a unit is filled with rested soldiers who are perfectly trained and in ideal physical condition, external factors such as extreme heat, long hours of continuous work, and exposure to toxins or the requirement to operate in protective gear to guard against toxins can only serve to degrade performance.
Physiological Stressors
Environment
Several environmental factors, including temperature, toxic substances, noise, and vibration, can degrade both the mental and physical performance of soldiers. Although some data suggest tolerable limits for these factors beyond which work is not safe or cannot be performed, there is unfortunately little research on performance decrements expected during exposure. As Van Nostrand (1986) suggests, it is unlikely that all performance is 100 percent effective until workload reaches maximum and performance drops to zero. However, data on intermediate stages are sparse (Hart, 1986).
Heat in relation to heavy work (Parsons, 1996) has been studied extensively by the Army over the years. The results of these studies have been translated into guidelines giving the maximum safe time exposures for various levels of heat (Technical Bulletin, Medical 507, 1980). As shown in Figure 9.1, heavy work can extend somewhat beyond 3 hours at a temperature of 82 degrees before heat exhaustion is expected; at 94 degrees, the work time is reduced to 90 minutes before exhaustion is expected. The figure also shows, for 2 hours of work, the relationship between type of work and recommended safe temperature.
Military Standard 1472D (1981) provides tolerance levels for heat and cold in terms of the number of hours of exposure for both physical and cognitive tasks. According to this standard, at 102 degrees the effective work time is limited to 30 minutes, while at 85 degrees work can be performed effectively for up to 12 hours. For cold, the limits are 30 minutes at 32 degrees and 4 hours at 59 degrees. Hancock and Vercruyssen (1988) have proposed recommended exposure time limits at various temperatures for cognitive performance; these limits are similar to those suggested in the military standard.
A second source of stress from the environment is toxic substances. One
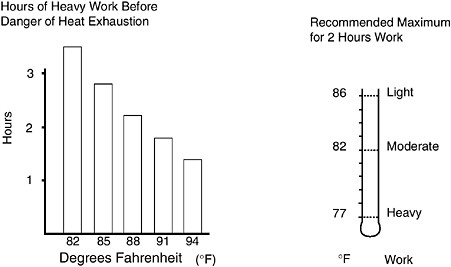
FIGURE 9.1 Maximum exposures for heat, measured with ''wet bulb temperature."
effect of toxic substances is to reduce the oxygen supply to the blood. This condition, referred to as hypoxia, has a straightforward physiological effect on the human body and mental processes. There is a near-linear correlation between oxygen partial pressure and rate of breathing, cardiac output, and degradation in some sensory functions. Specifically, by the time arterial oxygen saturation has dropped only 15 percent, visual acuity has already dropped 30 percent (Fulco and Cymerman, 1988). Physical power output and endurance are also promptly depressed, proportionally to the drop in arterial saturation. In contrast with these direct physiological effects, the performance of higher cognitive functions is only moderately depressed, particularly during the early stages of oxygen deprivation. Although compensatory adjustments operate in this domain as in other areas of physical stress, there appears to be a threshold that, once passed, signals a precipitous drop in performance. Also, changes in manifest mood can appear early.2
Another important consideration from the standpoint of modeling variations in performance concerns soldiers' ability to perform their tasks in the protective gear they must wear in the presence of a toxic threat. Similar issues arise for soldiers wearing heavy clothing to protect them from extreme cold. In her review of the literature on toxic substances, Van Nostrand (1986) notes one project
Apparently the major problems are heat buildup inside the clothing, the inability to perform work requiring manual dexterity with heavy gloves on, and to see well with the face mask in position. The end result of prolonged exposure to heat is extreme fatigue, and the result of fatigue is degradation of thinking and decision making skills. Therefore the tests that require soldiers to perform tasks that are so well practiced that they can do them without thinking about them will show less decrement than tasks which require the soldier to decide what to do next. Any task which requires vigilance will probably show large decrements in performance.
A third source of stress from the environment is ambient noise. According to Haslegrave (1996), people vary enormously in their response to noise and can adapt well to a continuous background of sound as long as it is below the intensity level that results in physiological damage and actual hearing impairment. The core response to a noisy environment is annoyance. Noise in combat environments, however, is likely to be of a class that is maximally disruptive—sudden, unexpected, and intense. Yet there do not seem to be quantitative (i.e., programmable) models for the performance effects of even extraordinary noise conditions.
A fourth source of environmental stress is vibration (Bonney, 1996). Studies of the relationship between vibration and human performance generally use three parameters to characterize vibration: acceleration, frequency, and duration. There are several modes by which vibration may be experienced, but the most commonly studied is whole-body vibration, as a soldier would experience in a moving tank, for example. Unfortunately, studies of whole-body vibration do not link the vibration parameters directly to measures of performance. Outcomes are typically expressed as tolerance limits. For example, the tolerance limit for accelerations of 3 meters per second per second at 5 cycles per minute is 1 minute. That is, the average soldier can tolerate this acceleration and frequency for 1 minute before performance begins to decline. In contrast, an acceleration of 0.3 meters per second per second at the same frequency can be tolerated for 8 hours. The standards information does not include a function showing the rate of decline once the threshold has been exceeded (Air Force Systems Command, 1980).
In the past, studies of environmental stressors were designed with the goal of specifying limits for effective performance, rather than demonstrating performance decrements over time as a function of various levels of the stressor. The results of these studies were used in making decisions about equipment design, task design, and mission length; they were not intended for use in developing
models of human behavior. With this new focus in mind it is important to recognize that collecting accurate data on performance decrements is both difficult and challenging given the range of environmental conditions and variety of task performance requirements.
Physical Work and Fatigue
The U.S. military has conducted several studies of the effects of continuous operations (and the resulting fatigue) on performance. These studies have demonstrated some quantitative changes in performance that might be used in building computational models of troops operating over extended periods of time. For example, Pfeiffer et al. (1979) and Siegal et al. (1980, 1981) developed a model for the Army Research Institute that calculated the performance over time of a soldier in a small unit. This model—performance effectiveness for combat troops (PERFECT)—combines task analysis of Army jobs with results from laboratory research on sleep loss, noise, visual acuity, and reasoning abilities.
In another study, Dupuy (1979) analyzed real battles in World War II and the Arab and Israeli wars from the standpoint of continuous operations involving enemy contact and recovery periods following combat. Fatigue was measured in terms of degradation in the ability to produce casualties. Three battle intensity levels were specified, based on the percentage of days during the operation that the unit was in contact with the enemy. If the unit was in combat 80 percent of the time, the degradation in performance per day was determined to be 7 percent; if the unit was in combat between 50 and 80 percent of the time, performance was determined to drop off at a rate of 2 percent per day. It was estimated that during recovery periods, performance capability was regenerated at a rate of 6 percent per day.
Additional research on continuous work was conducted at Walter Reed Army Institute (Belenky, 1986). The results of this effort suggest that a 7 percent degradation in performance per day for all tasks is a reasonable estimate for troops with 5 hours of sleep per night.
Figures 9.2 and 9.3 show the expected performance degradation over 5 days of continuous work under two conditions of sleep deprivation (U.S. Department of the Army, 1983). The soldiers in Figure 9.2 were deprived of sleep for 24 hours before they began continuous operations; the soldiers in Figure 9.3 were not deprived of sleep before continuous operations began. In both cases, the soldiers received approximately 4 hours of sleep each night during operations.
Cognitive Workload Stressors
When an individual is subjected to variations in information input rate and composition, performance changes are not monotonic, but follow an inverted U-shaped function (Hancock and Warm, 1989).3 A consistent human adaptation to
overwhelming task loads in information processing tasks (such as command and control) is to exclude some portion of the signal flow or postpone the processing response until the peak period has passed (Hancock and Chignell, 1987, 1988). The programmer intent on representing such behavior in an engagement simulation must address the question of the information flow rate threshold for such adaptive responses. It should be noted that this question in turn raises complex measurement issues concerning the level at which task elements are defined and their relationships specified.
Some responses to cognitive overload are dysfunctional. For example, sequence sense is often lost (Hancock et al., 1994). That is, some events are sequentially related, such as the cues a tank battalion commander will receive regarding unit losses. When confronted with a high signal flow load, the commander may forget the initial signals and not keep an accurate tally of losses, thus being unaware when a threshold for withdrawal has been reached.
The relating of actions to consequences can also be faulty, particularly if there is a time delay between action initiation and outcome or between outcome and feedback (Hancock et al., 1994). Such decoupling may seem intentional when a decision maker does not perceive negative outcomes; that is, he or she adopts a form of denial.
INTERNAL MODERATORS OF HUMAN BEHAVIOR
Internal moderators of human behavior include variables such as intelligence, level and type of expertise, personality traits, emotions/affective factors, attitudes/expectations, and cultural values. These moderators are complex, they interact, and they can influence performance in multiple directions. For example, individuals with a low level of expertise and aggressive personality characteristics will probably select different strategies than individuals with a high level of expertise and nonaggressive personalities. However, the form of this relationship cannot currently be predicted. With regard to emotions, fear may result in a tendency to interpret a situation as dangerous, while anger may result in an interpretation that others are hostile. Furthermore, an individual with an aggressive personality who is fearful may behave differently than an aggressive individual who is self-confident.
Intelligence
The Department of Defense conducted an extensive research project on linking selection criteria to job performance (Wigdor and Green, 1991). This project, known as the Job Performance Measurement Project, involved researchers from
all branches of the services. Specifically, data were collected on the relationship between performance on selected military tasks and the mental category classification of enlistees as measured by the Armed Forces Qualification Test, which places recruits into mental categories ranging from Category I (high) to Category V (low). Project A, conducted by the Army, also developed a database linking mental category to job performance (Campbell and Zook, 1991).
Two other studies, one conducted on M-60 tankers and the other on M-1 tankers (Scribner et al., 1986; Wallace, 1982), demonstrated a reduction in the number of target hits in a gunnery exercise as mental category declined. For the M-60 the reduction was from 108 hits for Category I to 61 for Category IV; for the M-1 it was from 102 hits for Category I to 86 for Category IV. The smaller decrement shown for the M-I tankers was attributed to the increased automation in this tank. Data such as these could be used to introduce variability into models of human performance.
Level and Type of Expertise and Cognitive Abilities
Rather than discussing education, training, and level and type of experience as internal behavior moderators, we focus here on level and type of expertise (which should be a function of those factors). According to Van Nostrand (1986), it appears that if a task is within the physical capability of the soldier, the cognitive aspects of the task will display greater variation in performance than will physical aspects that are frequently practiced. This conclusion was supported by testing the use of human data in the combined arms task force effectiveness model (CASTFOREM) (Miller, 1985).
As noted by Hudlicka (1997), recent research has identified a number of differences among individuals in terms of level of expertise, cognitive abilities (specifically the ability to perform mental "what-if" simulations), the ability to visualize situations from multiple perspectives, the ability to abstract relevant information, and preferred style of information presentation—textual or visual, and abstract or concrete (Hammond et al., 1987; Deckert et al., 1994; Badre, 1978). The Meyers-Briggs Inventory (MBI) has been used to measure individual differences on the cognitive style scale. The validity of such scores for characterizing students has been problematic (Bjork and Druckman, 1991). However, better success has been achieved when adult decision makers have been tested (Richards and Giminez, 1994) and their cognitive style scores have been correlated with performance.
Studies of tactical planning and command decision making identify features that characterize expert performance as distinguished from the performance of novice tactical planners (Fallesen and Michel, 1991; Lussier et al., 1992; Tolcott et al., 1989). According to these studies, experts have better situation awareness than novices in that they are aware of uncertain assumptions, make better use of available information, actively seek confirming and disconfirming evidence, and
have greater awareness of enemy activities. Experts also make better decisions than novices because they can develop flexible plans, conduct more elaborate wargaming, and make better predictions of battle events and outcomes.
Personality, Emotions, Attitudes, and Cultural Values
Although this section briefly addresses personality, emotions, attitudes and expectancies, and cultural values separately, it is clear that there is great overlap among these variables. For example, the personality trait of neuroticism has many of the same defining characteristics as depression and anxiety, the latter being treated by some authors as emotions. As another example, the personality trait of agreeableness results in a predisposition toward a positive attitude. Since distinctions among these classes of variables are difficult to make, and the nature of the data describing their impact on behavior is less than rigorous, the most useful approach to modeling them may be to treat them as a single class. Work on incorporating these variables into models of human behavior is discussed in a later section of this chapter. Here we review the some of the relevant research literature.
Personality
During the first part of the twentieth century, scientific interest in personality variables as descriptors and predictors of behavior was focused on the relationship between these variables and the quality of managerial decision-making performance. After World War II, however, simulation was introduced as a means of studying organizational processes (Bass, 1964), and interest shifted from the study of personality variables to the study of the influence of situational variables on managerial performance (Mischel, 1968). After some years it was recognized (see, e.g., Janis and Mann, 1977) that both situational and the personality variables may have important influences on decision making behavior, and thus it would be useful to examine their interactions (Byrn and Kelley, 1981).
In recent years, the measurement of personality has matured to the point where there is broad abstract agreement among researchers that the nature of personality can be captured by relatively simple self-descriptive questionnaires (Campbell, 1996). Such questionnaires are usually constructed "rationally" to reflect a particular theory or to support personality profiling (i.e., diagnostics) for certain groups, such as alcoholics or students. The result has been the specification of a finite set of traits that are extracted from the test data by means of factor analysis. Profiles based on the pattern of test-taker traits answer specific questions, such as whether this individual's personality is congruent with the requirements of this job (Hayes, 1996) or whether this individual will benefit from this particular therapeutic regimen (Parker et al., 1996).
There are quantitative scales for various traits, but most interpretations of
these traits in the context of military engagement situations are anecdotal (Dixon, 1976). Furthermore, there are as yet no up-to-date instruments for assessing the traits specific to soldiers or their commanders. However, certain traits are frequently judged by observers of military affairs to have a high likelihood of salience for the military character. At the top of any such list is "need achievement" or "n-Ach" (Bond, 1996). Other potentially relevant traits include risk taking and innovativeness. While position in communication networks and other situational factors influence awareness and acceptance of innovations (Valente, 1995), individual differences are also significant (Rogers, 1983). Some individuals are clearly more innovative and more accepting of innovations than others. Innovation can be a powerful factor in a battle command situation. Another factor for consideration is general alertness or vigilance.
One approach to characterizing personality traits is known as the five factor theory. This approach has been used by several investigators over the years, including Hogan and Hogan (1992). Although different investigators use different names for the factors, they can be generally classified as follows (Barrick and Mount, 1991):
-
Openness: curious, broad interests, creative, original, imaginative, untraditional
-
Conscientiousness: organized, reliable, hard-working, self-disciplined, honest, clean
-
Extroversion: sociable, active, talkative, optimistic, fun-loving, affectionate
-
Agreeableness: good-natured, trusting, helpful, forgiving, gullible, straightforward
-
Neuroticism: worrying, nervous, emotional, insecure, inadequate, hypochondriac
One possibility is to create a typology based on these factors that could be used to assign numerical values to specific agents in an engagement simulation.
Janis (1989) suggests that for the specific purpose of predicting and understanding command behavior, only three of the five factors are essential: openness, conscientiousness, and neuroticism. He asserts that these three traits can explain executive decision making in that the scores on these traits for individual managers will predict the manner in which each will fail.
At the organizational level, it is clear that personality plays a role in shaping behavior (Argyris, 1957). It appears likely, for example, that individuals in an organizational context tend to behave in ways that are congruent with their public personas. In particular, people attempt to present a consistent pattern of behavior that represents their mode of fulfilling an organizational role (Heise, 1992).
Role assignments and personality do not fully determine behavior in organizations. One reason for this is that the command, control, and communications (C3) structure and the task can constrain individual decision making to the point where individual differences become secondary. A second reason is that in large
numbers of units or very large units, the effects of cognition and individual differences often counteract each other to the point that the only main effect is that caused by the task or the C3 architecture.
In recent years there has been a strong push to merge concepts of personality with concepts of emotion (Plutchik and Conte, 1997). This merger is seen as a means of reducing the complexity of concepts and enhancing the power to predict behavior.
Emotions4
Hudlicka (1997) has developed a cogent approach to the problem of fitting concepts from research on human emotions into a framework of military operations—and the simulation thereof. She notes, for example, that emotions have until recently had a somewhat marginal status in both cognitive science and neuroscience. Over the past 10 years, however, important discoveries in neuroscience and experimental psychology have contributed to an interest in the scientific study of emotion. A growing body of evidence from neuroscience research points to the existence of neural circuitry processing emotionally relevant stimuli (i.e., stimuli that threaten or enhance the survival of the organism or its species) (LeDoux, 1992, 1989, 1987). Studies in experimental psychology have identified memory systems with distinct processing characteristics—explicit and implicit memory (Schachter, 1987; see also Chapter 5), analogous to the characteristics of the neural circuitry identified by LeDoux of fast, less differentiated processing and slower, more refined processing. Cognitive psychologists have described a variety of appraisal processes involved in inducing a particular emotional state in response to a situation (Frijda and Swagerman, 1987; Lazarus, 1991), and several models of these processes have been proposed (Ortony et al., 1988). The link between cognition and emotion has been strengthened by the findings of Cacioppo and Tassinary (1990), who show that some individuals have an emotional need to engage in cognitive activities.
A number of studies in cognitive and organizational psychology have documented the differential impact of various emotional states on cognition. While there are still disagreements among researchers regarding the number of basic emotions (ortony et al., 1992b), three affective states and traits—anxiety, obsessiveness, and depression (Oatley and Johnson-Laird, 1987; Ortony et al., 1988)—have been studied extensively; findings of these studies are briefly summarized below. These findings illustrate the impact of emotion on cognitive processing and the central role of emotion in the control of behavior. They also begin to blur the distinction between what have traditionally been thought of as the separate realms of cognition and emotion. Modern examples of conformance to group norms in highly charged situations, such as protest marches, exemplify the point.
Participation in such an event is a deliberated decision; behavior during the march is determined partly by emotive situations and the behavior of others.
Anxiety The primary impact of anxiety is on attention. Specifically, anxiety narrows the focus of attention and predisposes toward the detection of threatening stimuli and the interpretation of ambiguous stimuli as dangerous (Williams et al., 1997; Williams et al., 1988; Mineka and Sutton, 1992).
Obsessiveness A number of studies have documented the impact of obsessiveness, characterized by "checking" behavior, on cognitive processing. Among the primary effects identified are lack of confidence in one's own attention apparatus to capture salient features in the environment (Broadbent et al., 1986); narrow conceptual categories (Reed, 1969; Persons and Foa, 1984); poor memory for previous actions and a general lack of certainty about one's own ability to distinguish between events that occurred and those that were planned or imagined, and slower decision making speed related to obsessive gathering of confirming information (Sher et al., 1989).
Depression The primary impact of depression is on memory. Perhaps the best-documented phenomenon is mood-congruent recall in memory (Bower, 1981; Blaney, 1986), whereby a particular affective mood induces recall of similarly valenced memories (e.g., a depressed mood enhances recall of past negative experiences, including negative self-appraisals). Depression has also been studied in the context of particular inferencing tasks, such as judgment and decision making, in which depression appears to lower estimates of the degree of control (Isen, 1993). Even more to the point, a positive disposition appears to be correlated with high-quality performance among managerial-level employees (Straw and Barsade, 1993).
Attitudes and Expectancies
Attitudes were once defined as predispositions to respond in certain rigid ways. That is, an individual with a negative attitude toward a particular situation would always respond negatively or with avoidance. Current conceptualizations, however, distinguish between fundamental and transient attitudes (Heise, 1979) and allow for a change in position. This approach includes feedback controls that continually rebalance the relationship between the two types of attitude. Thus behavior congruent with fundamental attitudes can result in a change in the transient state, and if a difference in tone between fundamental and transient attitudes is detected, behavior that will minimize the discrepancy is initiated. These are core propositions of affect control theory (Heise, 1992)
In prior, stage-setting work, Osgood (1967) used the techniques of semantic differential in a multinational survey approach to test the idea that attitude re-
sponse sets are aligned along three affective dimensions: evaluation (good or bad), potency (strong or weak) and activity (dynamic or static). Under this classification, a commander's attitude toward an enemy force might be bad, strong, and dynamic, and these tendencies would guide his/her actions in confronting the enemy force.
Expectancies are a product of the interaction between beliefs and attitudes. Hypothetically, beliefs are purely cognitive—based on past objective experience. When a belief and an attitude come together, an expectancy is established. Such a state is not only a subjective estimate of the probability of a given occurrence, but also a perception moderator such that low subjective probability of occurrence is associated with a form of perceptual denial. If an event falls outside the beliefs and attitudes of the perceiver as manifested by his/her expectations, the event is susceptible to misperception and misidentification. The linkage of attitudes to the quality of military performance probably should be through the concept of expectancies. That is, there appear to be no a priori grounds for suggesting that any specific pattern of attitudes will generate any particular impact on military performances (Cesta et al., 1996). However, if an attitude influences expectancies—particularly if it is not supported by objective facts—it can influence decisions made about the object.
Cultural Values
Cultural values and their impact on behavior are of critical importance to the military. Although the study of these values and the influence of nationality on behavior is an active area of behavioral research (Berry et al., 1992), the efforts to date have been limited, and most of the research is not centrally relevant to military operations. While anthropological studies reveal that cultural values have a profound effect on the behavior of the individual warrior (Thomas, 1994) and the planning of war strategy (Pospisil, 1994) most such research has been carried out in the setting of preindustrial societies (Carneiro, 1994).
Cross-cultural studies that compare behaviors in technologically advanced societies tend to focus on either industrial/commercial operations (Carey, 1994) or educational settings (Rosen and Weil, 1995). The Rosen and Weil report is an example of a study of nationality and performance in which the researchers looked at relative ''computer anxiety" among college students in 10 countries. The result was a pattern of three clusters: high anxiety on the part of the Japanese and Czechoslovakians and low anxiety on the part of the Israelis, with the remaining (including U.S.) students falling in a large middle cluster. In support of their work, Rosen and Weil suggest that despite its industrial strength and technological expertise, Japan shows a low level of utilization of information processing systems, and the Japanese demonstrate a general lack of individual exposure to information technology that could be the cause of their anxiety. Although the Rosen and Weil study provides no observations on the relative competence in the
use of computer technology that might be shown by representatives of different nationalities, it does suggest the possibility of some variation among nationalities, particularly in operators and beneficiaries of computer-based command and control systems.
In contrast to the limited data on nationality/culture and the performance of militarily relevant tasks, conceptual modeling of cultural values has an elaborate history. The key empirical contribution to the formulation of cross-cultural psychology was made by Hofstede (1980), who conducted an extensive study, using questionnaires, of the employees in a multinational firm. Citizens of 67 nation-states were participants. Factor analytic techniques revealed a set of four major dimensions: power distance, uncertainty avoidance, individualism, and masculinity/femininity. Power distance is interpreted as a characteristic of the culture, rather than an individual differences dimension. Basically, it corresponds to the degree to which societal organizations stress status hierarchies. The higher the score, the more transactions between individuals in different strata are restricted. A possible implication is that procedures such as adherence to the formal chain of command will be enforced more rigorously in a culture with high power distance.
Hofstede does not link power distance scores (or other factor scores) to variations in performance. Possible performance outcomes can only be inferred on the basis of other behavioral ramifications. For example, it is relevant in a military engagement context to know the extent to which subordinates can discuss the desirability of a given tactic with the command authority who issues a tactical order. One might infer that for nationalities having high power distance, the amount of discussion of tactical orders would be minimal. However, building a performance model on the basis of such inferences is difficult.
Helmreich and colleagues (Helmreich et al., 1996; Sherman and Helmreich, 1996; Merritt and Helmreich, 1996) took Hofstede's approach further toward explicit treatment of performance in the setting of advanced systems operations. Specifically, they looked at a large set of pilots and copilots of commercial aircraft from many countries. Their main focus was on pilot attitudes toward automation, in particular their affective responses to an advanced training program in cockpit resource management. In light of Hofstede's findings, they also considered behavior such as the acceptance or rejection of messages from subordinates about system status. Such behavior could be relevant in a military context, but direct linkages between scores on the cultural value dimensions and performance were not identified.
Even taking a very broad view of culture and nationality does not produce many findings of specific relevance (see, e.g., Berry et al., 1992). Matters such as the powerful value commitments of soldiers in the subcultures of elite units are rarely studied. Present sociological and anthropological studies focus on issues such as the effects of the representation of events of the Gulf War to civilian populations by the mass media (Mann, 1988; also see Berry et al., 1997). Some
connections appear in the area of leadership styles of various nationalities and the contrast between vertical and horizontal organizational structures (see Chapter 10). Whether there are important variations in the organization of military formations as a direct consequence of cultural values is an open question. One factor that holds promise for varying in a systematic way across nationalities is risk taking. Brown (1989) suggests, for example, that risk taking is valued much more in western European and North American societies than in other cultures. If this is true for military commanders, it could be a crucial variable for some forms of simulation.
Possibly the most cogent basis for research directed at the influence of cultural values on the performance of military combatants comes from work on culture and cognition. Much of the momentum in this research area is centered at the University of Chicago (see, e.g., Stigler et al., 1990). The movement has satellite centers at the University of Pennsylvania (Heine and Lehman, 1997) and Kyoto University in Japan (Kitayama and Markus, 1994) that are producing research findings at a basic level. However, the work that is beginning to take on the shape of a computational model is that of Forgas (1985, 1995), which links the affective state (being culturally defined) to strategic decision making and high-level problem solving. While it is still not possible to assert that a soldier from a particular culture will be culture bound to respond in a particular way to a given battlefield event, the impact of culture is being investigated in a progressively more rigorous manner.
Other Intrinsic Variables
In addition to personality, emotion, and cultural values, a number of other intrinsic behavior moderators may impact performance and can be parameterized (Hudlicka, 1997). These include, at the individual level, the following:
-
Cognitive styles (attentional factors, metacognitive skills, susceptibility to cognitive bias, assimilating versus accommodating, analytic versus initiative, goal-directed versus data-directed)
-
Individual preference for or avoidance of situations, activities, types of units, types of targets, and previous operations
-
Training/education, including doctrinal emphasis on units and types of maneuvers, doctrinal preferences for timing of operations, and specific areas of competency
Additional moderators include social factors such as demographic homogeneity, educational homogeneity, cultural diversity, and cultural stability. We do not discuss these variables here, but merely mention them to show the range. As noted earlier in this chapter, our purpose is to select a few variables for discussion to illustrate the state of knowledge about individual differences and how this
knowledge might be applied in representing human behavior in computational models.
MODELING BEHAVIOR MODERATORS
This section reviews various attempts to incorporate behavior moderators into computational models of human behavior. The first is the Army's work on the improved performance research integration tool (IMPRINT) (Archer and Lockett, 1997; Allender et al., 1997a), to which physical environmental stressors, mental workload, personnel characteristics, and training are added to make the human component more realistic. A primary use of this model is to provide human factors input for models designed to test and compare the performance capabilities of various systems considered for acquisition. We then review efforts to develop models that incorporate affective variables into synthetic agents (Moffat, 1997; Elliot, 1994; Cesta et al., 1996). The focus of this work has been twofold: to understand human behavior and to build realistic synthetic actors for entertainment. We then examine an approach to the specific problem of incorporating emotion into the simulation of command decision making proposed by Hudlicka (1997). Finally, we describe some alternative approaches to modeling the effects of intrinsic moderator variables on perception and situation awareness. We include these examples to show that even with imprecise definitions and weak quantification, some progress has been made toward incorporating such variables in models of human behavior.
IMPRINT
As described by Allender et al. (1995, 1997a, 1997b) and Lockett and Archer (1997), IMPRINT operates as an event-based task network in which a mission is decomposed into functions that are further decomposed into tasks. The tasks are linked together in a network that represents the flow of events. Task performance time and accuracy, along with expected error rates and failure to perform, are entered for each task. These data, obtained from military research studies (field tests, laboratory tests, and subject matter experts), are assumed to be representative of average performance under typical conditions.
In addition to basic task network simulation, IMPRINT also provides the capability to incorporate the effects of training, personnel characteristics, cognitive workload, and various environmental stressors (see, e.g., Kuhn, 1989). Stressors degrade performance, whereas training can both increase and degrade performance.
The stressors include protective clothing (mission-oriented protective posture, or MOPP), heat, cold, noise, and hours since sleep. Each of these stressors can have an impact on one or more of several classes of human behavior, such as visual, numerical, cognitive, fine motor, and gross motor (referred to as taxons). Taxons are basic
TABLE 9.1 Environmental Stressors and Taxon Effects in IMPRINT
task categories. The nine taxons used in IMPRINT were derived from the task taxonomies described by Fleishman and Quaintance (1984). Table 9.1 provides an overview of the proposed effects of the environmental stressors on the various taxons. Taxons are used to characterize tasks by means of a weighing system, and since stressors are linked to taxons, they are similarly weighted. Stressors can have two types of effects—they can increase performance time or reduce performance accuracy. The data used to determine these values for each taxon are drawn from several military publications, including Mil STD 1472D (1981), Mil-HDBK-759-A (1981), Belenky et al. (1987), Ramsey and Morrissey (1978), and Harris (1985). A user of the IMPRINT tool can compute expected soldier performance in terms of speed and accuracy by designating intersects of capabilities and tasks.
Capturing Emotions in Synthetic Agents
According to Simon (1967) and Sloman (1997), affect is incorporated into agent behavior as soon as the agent is assigned a goal or objective; obstacles to achievement of the objective are the specific instigators of affective responses (Aube and Sentini, 1996). The precise form of the affective state and its influence on behavior are additionally contingent on the intrinsic attributes of the agent (Dyer, 1987).
Several investigators in artificial intelligence and computer science have begun work on incorporating affective variables such as personality and emotion into synthetic agents (Brehmer and Dorner, 1993; Nass et al., 1997). This work is at a fairly primitive level and, as noted above, has been pursued primarily to provide a vehicle for further study of human behavior or to develop more
realistic actors in synthetic entertainment environments. For example, Rao (1996) uses the concept of the BDI agent, that is, one that possesses beliefs, desires, and intentions. These attributes are assigned to agents by means of Horn-clause logic and PROLOG. Likewise, Aube and Sentini (1996) have incorporated factors such as loyalty, patriotism, pride, and anger in their synthetic agents. They refer to these concepts as "regulators." Cesta et al. (1996) assign one of four dominant attitudes to synthetic agents: solitariness, parasiticalness, selfishness, and socialness (e.g., giving and receiving help). Distinctive behavior emerges from these agents when they engage in a bargaining game, even when the agent's characters are one-dimensional.
Giunchiglia and Giunchiglia (1996) suggest that agents can be programmed to hold beliefs about the views of other agents. In context, this would be equivalent to a condition in which the OPFOR (opposing force) commander possessed ideas about the BLUFOR (blue force) commander's ideas about the OPFOR commander's behavior.
Moffat (1997) proposes a simplified model of emotion that can be used to provide synthetic agents with "personalities." In this work, personality is defined as follows (p. 133):
Given an agent with certain functions and capabilities, in a world with certain functionally relevant opportunities and constraints, the agent's mental reactions (behavior, thought, and feeling) will be only partially constrained by the situation it finds itself in. The freedom it has in which to act forces any action to reveal choice or bias in the agent, that may or may not be shown in other similar situations. Personality is the name we give to those reaction tendencies that are consistent over situations and time.
Moffat's model is named "Will" after William of Occam (for parsimony). Some of the true emotions built into Will include happiness, anger, and pride. Each of these is characterized by valence (whether it is pleasant or unpleasant), by agency (who is responsible for the event—the world, the user, or the self), and by morality (whether the action or event is considered morally good or bad).
Among the most recent implementations are those of Padgham and Taylor (1997), who emphasize simplicity of the program structure, and Muller (1997), who emphasizes the richness of interactions between cognitive and affective elements. However, none of these implementations is directly germane to the simulation of military engagements.
Approaches to Modeling the Effects of Moderator Variables on Perception and Situation Awareness5
In this section, we describe how individual difference variables could be used to moderate perception and situation awareness within the context of the
types of process models described in Chapter 7. In particular, we describe how moderator parameters could modulate a perception model built on modern estimation theory, and how such parameters could also be used to modulate situation awareness models built around, respectively, the technologies of expert systems, case-based reasoning, and belief networks.6
Modern Estimation Models of Perception
The discussion earlier in this chapter of perceptual models that might feed into a situation awareness model outlines a hybrid model, consisting of a state estimator and an event detector, that (1) generates a current state estimate of any continuous dynamic variables and (2) identifies current task-relevant event and features (see Chapter 7 for a full discussion). The event detector component of this model can be thought of as a cue extraction mechanism that combines both data-directed and goal-directed processing to identify salient perceptual features and important events in the incoming data stream (i.e., the event detector module will be more efficient at extracting features for which it has been trained). The state estimator can be implemented as a Kalman filter (Kleinman et al., 1971) containing an internal model that captures the dynamic properties of each object in the environment. The event detector can incorporate a rule-based event classification mechanism with a fuzzy-logic front end, allowing for manipulations of the certainty of the detected events and cues. Stressor/moderator parameters of this model could include the following:
-
Content parameters—sophistication and accuracy of the internal estimator model, number of events that can be detected, preference for particular events
-
Process parameters—number of variables that can be processed simultaneously, speed and accuracy of state prediction and event detection
The primary individual differences that could be represented in the state estimator and event detector include training, skill level, and individual history, which affect both the number and type of state variables predicted and events detected (i.e., sophistication of the commander's internal model) and the efficiency of prediction and detection (e.g., well-trained events are detected more readily, requiring lower signal strength or fewer triggering cues). This approach could also be used to represent the documented effect of anxiety on interpretive functions (MacLeod, 1990) by biasing the interpretation of certain neutral stimuli as threatening.
Models Based on Expert Systems
There are a number of ways to introduce stressor/moderator effects into situation awareness models based on expert systems, such as the following:
-
Content parameters—number of rules, type/content/complexity of rules
-
Processing parameters—speed and accuracy of matching, type of conflict resolution, speed of conflict resolution
All categories of individual differences can be represented in a situation awareness model based on expert systems. Varying levels of skill and training could be represented by varying the number and content of individual rules—these include both the triggering antecedent conditions and the consequents for identifying specific situations. The degree of certainty associated with the assessment, which is a function of both skill level and affective personality factors, could be modeled by varying the degree of matching accuracy required for rule triggering. Differences in situation assessment style could be represented by specific assessments associated with particular triggering conditions. Thus a model of an overly cautious commander could have a preponderance of situations characterized by high blue losses, while a more aggressive and risk-tolerant model could include a higher number of red loss consequents. Other style preferences, such as speed of assessment or specific requirements for certainty, could be modeled in terms of processing parameters, controlling the speed of rule matching and execution and the certainty of rule activation strength required to trigger action.
Additional discussion of how moderators can be introduced into production rule decision-making models, specifically Soar and adaptive control of thought (ACT-R), is provided in Chapter 6. That discussion is directly pertinent as well to a situation awareness model based on expert systems.
Models Based on Case-Based Reasoning
An approach similar to that used for models based on expert systems can be used to incorporate stressor/moderator effects into situation awareness models based on case-based reasoning. For example, the following parameters could be included in such a model:
-
Content parameters—number of cases, elaboration of cases, type and number of index features
-
Processing parameters—speed and accuracy of matching index cases, sophistication of adaptation rules
As with the expert system-based models, all categories of individual differences can be represented through suitable incorporation of moderator variables into episodic or case-based reasoning models (see Chapter 5 for more discussion).
Models Based on Belief Networks
With respect to a belief network approach to constructing situation awareness models, recall from Chapter 7 that the situation assessor could be implemented as a set of belief nets (Pearl, 1986) that represent knowledge as nodes and links. Nodes represent particular features and events, intermediate results, and final overall situation types. Links represent causal and correlational relations between events and situations represented by the nodes and are associated with conditional probability tables. Stressor/moderator parameters of this model could include the following:
-
Content parameters—content of belief network nodes, number of nodes, network topology, belief network conditional probability tables, number of distinct belief networks
-
Process parameters—speed of propagation of probabilities along belief network links, speed of node belief updating, affective valence associated with particular nodes (e.g., a value associated with a particular situation or feature indicating whether it is desirable or undesirable)
All categories of individual difference variables identified earlier in this chapter can be represented in a belief network-based situation assessor. For example, varying levels of skill and training could be represented by varying numbers and types of belief network nodes and more finely tuned link probabilities, with higher skill levels being characterized by more refined nodes allowing greater accuracy, speed, and completeness of situation assessment. Individual history could be represented by weighting certain links more heavily, thus increasing the likelihood of their activation during processing and the consequent derivation of the corresponding specific situations. Personality/affective factors could be represented by associating a specific affective value (positive or negative) with previous situations. Depending on the current affective state of the agent, certain situations might then be recalled preferentially as a result of mood-congruent recall (Bower, 1981; Blaney, 1986), increasing the likelihood of their recognition, while others might be avoided, decreasing the likelihood that they would be selected during situation assessment. Finally, differences in cognitive and decision-making styles could be represented by the setting of processing biases to favor activation of nodes with certain properties (e.g., a recency bias being reflected by the most recently activated node or the ability to favor goal-directed versus data-directed reasoning) and by node number and content (e.g., a larger number of more refined nodes representing an accommodating preference and a smaller number of more generic nodes representing an assimilating preference, or the node level of abstraction representing case-based vs. first-principles situation assessment).
An Approach to Modeling the Impact of Affective States on Command Decision Making7
In this section, we describe how affective variables could be used to modify command decision making within the general context of existing cognitive architectures, such as ACT-R and Soar (see Chapter 3 for further discussion of these and other such models). The basic approach focuses on the use of symbolic, modular cognitive architectures that support parameter-controlled processing, where the parameter vectors represent distinct individual differences across the range of variables discussed earlier. Figure 9.4 illustrates the general notion of individual difference parameters selectively and differentially moderating different processes and resources in a given cognitive architecture, thus leading to observable changes in the behavioral output.
Below is an outline, developed by Hudlicka, of the impact of selected affective states (anxiety, obsessiveness, and depression) on the decision making process of a platoon leader planning an ambush.
Mission, Enemy, Terrain, Troops, and Time (METT-T) Analysis
-
Depressed state induced by general combat stress level can induce recall of previous failures associated with similar situations (e.g., similar weather, enemy unit involved, friendly task elements, terrain).
-
Lack of time available for planning can increase anxiety and fatigue in an obsessive platoon leader, who requires more time for decision making.
-
Platoon's interim isolated position can increase leader's anxiety.
Tentative Plan Construction
-
Anxious platoon leader can overestimate danger potential of situation and may commit a larger-than-necessary number of troops and resources.
Situation Estimate and Course-of-Action Development
-
Anxious and obsessive leader can be concerned that enemy can bypass ambush too easily and may be tempted to spread personnel out too much to cover more ground.
-
Depressed leader may overestimate likelihood of losing critical equipment (e.g., helicopters).
-
Obsessive leader may micromanage the process, thereby creating additional bottlenecks (e.g., insist on speaking with helicopter pilots).
-
Anxious leader may overestimate danger potential and choose an inappropriate, overly conservative course of action.
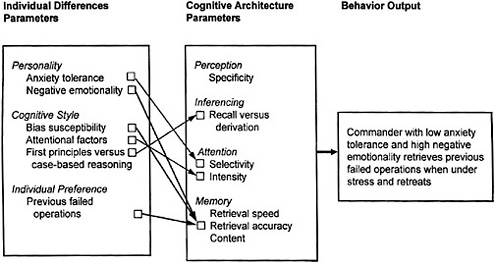
FIGURE 9.4 Summary of modeling intrinsic behavior moderators for command decision making.
-
Obsessive leader may rehearse more thoroughly, thereby increasing chances of success.
Plan Monitoring and Execution
-
Anxious leader may interpret a signal as approaching enemy and fire too early, thus betraying platoon's position to enemy.
-
Obsessive leader may not trust incoming data about approaching enemy and wait too long before initiating action.
The above behaviors can be modeled with a cognitive architecture in two ways:
-
By modifying the model content to reflect the desired characteristics, that is, by constructing the model knowledge base in such a way that the desired behavior can be generated
-
By setting the model processing parameters to reflect a particular emotional orientation or emotional state, thereby biasing the model processing in a particular direction
Both of these approaches are illustrated below by examples showing how some of the specific conditions and behaviors could be represented in a model of human performance that assumes the architectural features of Soar and ACT-R.
Example 1 Depressed State Induces Recall of Previous Failures
To model this phenomenon successfully, a model would require the following features:
-
A collection of past failure situations encoded in memory
-
An affective tag associated with each memory element, indicating its affective valence (positive, negative, or neutral)
-
A parameter indicating the current affective state of the commander
-
An associative search process biased toward the recall of information matching the current affective state
-
A perceptual process capable of encoding the current situation in terms of features characterizing encoded memory at the appropriate level of abstraction (i.e., particular weather, unit type, maneuver type)
Example 2 Lack of Time Increases Anxiety in an Obsessive Leader
To model this phenomenon successfully, a model would require the following features:
-
A parameter indicating commander traits, set to indicate high obsessiveness
-
A link between this parameter value and a set of planning preference parameters, such as time required to make a decision and number of decision iterations
-
A link between the planning preference parameters and the current anxiety state of commander, allowing an increase in anxiety if the time available is less than the time required or if the number of iterations possible is less than the number of iterations required
Example 3 Anxious Leader Overestimates Potential Danger of Situation and Commits a Larger-than-Necessary Number of Troops and Resources
To model this phenomenon successfully, a model would require the following features:
-
A parameter indicating the current affective state of the commander
-
A representation of alternative plans in terms of specific features, such as number of units committed, amount of resources allocated to each unit, placement of units relative to each other, and maneuver type
-
An indication of how the value of each of the above features varies with different affective states (e.g., increased anxiety increases resource requirements)
-
A mapping between the above current affective state and feature values, and selection of a plan that matches the values of the current affective state
Implementing the suggestions in the above examples involves modeling and manipulating the agent's internal behavior at the information processing level.
This work is in contrast to the efforts on IMPRINT, in which the focus is on behavior modification at the task level.
CONCLUSIONS AND GOALS
Although data exist on the effects of extrinsic moderator variables on human performance, most of these data provide only cutoff points or limits, rather than performance degradation functions. As a result, these variables cannot be encoded directly into models of human behavior. However, as shown by the work on IMPRINT, it is possible to develop and test hypotheses about the effects on performance time and accuracy of specific levels of such variables as temperature, noise, and sleepless hours.
With regard to internal moderators of behavior, several theories have been developed that categorize the variables related to personality, emotion, and cultural values. In some cases, the theories associate the variables with variations in performance. Yet there is a great deal of overlap among the variables classified under personality, emotion, attitude, and cultural values, and most of the empirical data in this area are subjective and qualitative. Some preliminary success has been achieved with the introduction of internal behavior moderators into models of human behavior. However, these models include extremely simplistic representations of the relationships between specified levels of one or more of these variables and performance.
Short-Term Goals
-
Apply existing knowledge about both extrinsic and internal behavior moderators to establish value settings for various parameters of human behavior. That is, estimate how specified levels of sleep loss or fatigue, for example, might affect attention, multitasking, or decision making, and observe the effects of the use of such estimates in a sample of simulated engagements.
-
Study the effects of introducing emotion into models of human behavior in the form of relatively simple algorithms. For example, set up demonstrations to show how different levels and types of emotion affect decision making outcomes in the models. Use subjective assessments by experienced operational personnel to determine the value of these additions for increasing the realism of event sequences.
-
Formulate a research strategy for developing sufficient knowledge about selected behavior moderators to provide a basis for encoding these variables into computational models.
Long-Term Goals
-
Develop computational models of behavior moderators that are based solidly on empirical research findings.



























