
3
Technological Capabilities
The following discussion of the technological status of various mobility systems and their application in past planetary exploration missions is organized according to the specific tasks outlined in the charge given to the Committee on Planetary and Lunar Exploration (COMPLEX) by the Space Studies Board (see preface). These tasks are the following:
- Achieving mobility. What are the practical methods, the state of technology, and the key requirements for technology development?
- Sample acquisition. What are the associated needs for sample acquisition?
- Terrestrial field demonstrations. What terrestrial field demonstrations are required prior to spaceflight missions?
Achieving Mobility
Several distinctly different approaches to mobility will be needed to accomplish the science goals outlined in COMPLEX's Integrated Strategy1 and NASA's solar system exploration roadmap,2 as illustrated through examples described in the previous chapter of this report. Although the need for a variety of devices is dictated somewhat by differences in the mobility requirements among scientific disciplines, the mobility requirements among disciplines overlap more than they differ. The need for a variety of mobile platforms and devices stems primarily from environmental differences among solar system bodies, that is, from small bodies with negligible gravity to large bodies with significant gravity, from bodies with no atmospheres to bodies with dense atmospheres, from bodies with accessible solid surfaces to bodies with no solid surfaces, and, not the least, bodies with a variety of extreme thermal and radiation environments.
The platforms currently under consideration include rovers, hoppers (and their more extreme relatives, the touch-and-go orbiters), balloons (including aerobots), aircraft, and cryobots. Several of these vehicles also require devices for manipulation of instruments and for manipulation or collection of samples. These devices are dealt with in this chapter's section on sample acquisition. Where relevant, a brief summary of past experience with the use of similar devices is summarized in a text box.
Rovers
The first use of an unmanned rover on another solar system body occurred in the early 1970s when the former Soviet Union's Luna 17 and 21 missions landed the Lunokhod rovers on the surface of the Moon (see Box 3.1). Not until the successful deployment of Sojourner on the surface of Mars in 1997 was another unmanned rover used for solar system exploration (see Box 3.2). More attention has been paid to the development of rovers than any other form of mobility.3,4,5,6,7,8
The range of rover types and the technological problems associated with their deployment were well understood by the late 1980s.9 Many rover types have been discussed to date, ranging in size from nano- and microrovers with total masses of less than 1 kg to large vehicles with masses in excess of 400 kg (Box 3.3).10 Although many generic science payloads have been proposed for discussion purposes, the overall thrust of much of the work to date has been technological. For much of the 1990s, major development efforts have been directed toward reducing the total size of rovers and increasing their autonomy.11,12
Scientific and Technological Requirements
To be most effective, rovers must be able to carry a set of complementary science instruments for a significant range. The extent of this range will depend on mission-specific factors. These include the scientific objectives to be met, the scientific payload carded by the rover, the size of the landing-error ellipse, nature of the site chosen, prelanding knowledge of the site, and the availability of planning materials (e.g., maps based on very high resolution orbital or descent imagery) to facilitate rover operations. Given these caveats, assessments of, for example, various martian landing sites offered by the planetary geoscience community suggest that minimum ranges of 1 to 10 km are required.13 Longer ranges will be necessary if a rover is to characterize and sample geological units on a more regional scale or if it is to visit more than one specific site. To adequately perform the scientific characterization of a site, a rover requires the following capabilities:14
- Context—the ability to determine the lander's location in relation to features recognizable from orbit;
- Vision—the ability to return recognizable images of the local area to Earth;
- Mobility—the ability for significant movement away from the landing site;
- Manipulation—the ability to handle samples physically.
Furthermore, the rover must carry an integrated set of science instruments. That is, in the words of a report on a recent workshop on surface instruments, the rover "should not just carry a collection of individual instruments each playing its own tune, but must be an orchestra."15 Many planetary researchers believe that single-instrument rovers are not likely to be very useful scientifically, because an array of measurements taken by different instruments commonly is necessary to answer even simple questions. For example, adequately defining a rock type requires at least one instrument capable of measuring elemental abundances, visual to infrared spectrometers to determine mineralogy, and a very high resolution (<1 mm/pixel) imager to determine grain size, structure, and texture.
Technological requirements for the command and control of conventional rovers can be stringent. As exemplified by Lunokhod, system and vehicle control can be largely Earth based for lunar rovers because the two-way communication time is short. However, even though Pathfinder was a highly successful mission, the speed and range of Sojourner were limited by the long two-way communication time and by its limited autonomy.
Future rovers designed to conduct long traverses (tens to hundreds of kilometers or more) or to operate on more distant bodies face a significant operational challenge. Such missions will require significant local autonomy, including the ability to perform local navigation, identify or sample sites of potential scientific interest, regulate on-board resources, and schedule activities. But mission scientists want to retain some control over the rover and its operations. If they do, in the words of the Mars 2001 Science Definition Team, "the rover would spend most of its time stationary waiting for instructions from home and so distances traveled would be greatly reduced as would the number of analyses, images . . . ."16
|
BOX 3.1 Lunokhod The Soviet Luna 17 and 21 missions (launched in 1970 and 1973, respectively) each delivered to the Moon's surface an eight-wheeled, roving vehicle called Lunokhod (Figure 3.1.1). Weighing 756 and 840 kg, respectively, Lunokhods 1 and 2 each carried several instruments, including stereocameras, a survey camera, a laser reflector (for laser ranging), a magnetometer, a cosmic ray detector, an x-ray spectrometer, and a penetrometer.1 Lunokhod 1 returned data for more than 10 months and traversed 10.54 km, while its successor operated for only 3 months but ranged 37 km over the surface of the Moon.2 Lunokhod resembled a teapot, complete with an openable lid that was hinged along one side of the kettle top. Solar panels covered the underside of the lid; during the day, the lid remained open, collecting energy for operation and storage. At night, the lid closed to conserve heat inside the instrument housing. Lunokhod's chassis supported eight independently suspended and powered wheels. Each wheel was constructed of three wire rims, each of which was attached to the hub by sixteen spokes. A wire mesh and lugs covered and connected the wheel rims.3 Additional characteristics of the Lunokhod vehicles are listed in Table 3.1.1. The Lunokhods fulfilled both scientific and engineering objectives. Combined, they returned more than 500,000 images and 500 panoramas, performed some 1000 soil property tests and 50 soil chemical analyses, and returned astronomical observations from the surface of the Moon.4 Despite its shorter life span, Lunokhod 2 took proportionally more measurements than did its predecessor, consistent with the distance it traversed. The Lunokhods successfully negotiated the lunar mare, a surface that is relatively free of large obstacles and for which they were specifically designed. Lunokhod 1 traversed the western section of Mare Imbrium, and Lunokhod 2 traveled over Mare Serenitatis. The rovers could operate only under the direction of a team of five (including a vehicle commander, a driver, a navigator, and engineers) who controlled the vehicle remotely based on input from the rover |
TABLE 3.1.1 Lunokhod Characteristics
|
Characteristic |
Both Rovers |
Lunokhod 1 |
Lunokhod 2 |
|
Rover mass |
|
756 kg |
840 kg |
|
Rover length |
2.13 m |
|
|
|
Wheel basea |
1.70 m |
|
|
|
Number of driving wheelsa |
8 |
|
|
|
Wheel diameter/widtha |
0.51 m/0.2 m |
|
|
|
Wheel dynamic rangea |
0.1 m |
|
|
|
Maximum surmountable vertical obstaclea |
0.4 m |
|
|
|
Range traversedb |
|
10.54 km |
37 km |
|
Length of operations |
|
10 mo |
4 mo |
|
a A.P. Vinogradov, Lunokhod 1—Mobile Lunar Laboratory, translated by Joint Publications Research Service, JPRS#54525, distributed by National Technical Information Service, U.S. Department of Commerce, 1971, p. 73. b Marcia S. Smith, Space Activities of the United States, ClS, and Other Launching Countries/Organizations: 1957–1994, Congressional Research Service 95–873 SPR, Library of Congress, Washington, D.C., 1995, p. 90. |
|||
|
cameras and other sensors. This method proved to be extremely challenging and required a crew that had not only "a knowledge of control techniques and skills, but also definite psychophysical qualities: a capacity for prolonged attention, speed in reaction and in processing information, long-term and current memory, acuteness of vision and hearing . . . . [Moreover] no training, even properly formulated, could completely recreate the actual conditions and replace actual control experience."5 Longer lags in communications make this method of operation highly impractical for use beyond the Moon.  FIGURE 3.1.1 This sketch shows the basic features of the former Soviet Union Lunokhod rover. Two such vehicles were deployed on the Moon in the early 1970s. Illustration adapted from The Moon—Our Sister Planet, Cambridge University Press, Cambridge, England, 1981.
|
|
BOX 3.2 Sojourner Sojourner, the rover on the Mars Pathfinder mission (Figure 3.2.1), was basically a rectangular table on wheels (Table 3.2.1). The "tabletop" was a 0.25 m2 solar cell array. Navigation was controlled from Earth, but the rover was capable of avoiding obstacles by using laser sensors and a simple avoidance protocol included in its on-board processor (Intel 80C85). Navigation was accomplished with two forward-looking monochromatic cameras that provided a stereoscopic view of the terrain. Sojourner's maximum speed was 1 cm/s for a total possible range of about 60 m/day, assuming continuous driving and no obstacles; actual speeds and distance traveled were much less. The maximum data relay rate was - 30 Mbits/day, via the lander. The suspension system allowed individual wheels to climb over obstacles as high as the wheel diameter (13 cm). In addition, because each wheel was independently driven, Sojourner could use them to dig shallow trenches in the martian soil. A color monoscopic camera was mounted at the back of Sojourner, along with an alpha-proton x-ray spectrometer (APXS). The latter was mounted on an arm that permitted placing its sensor against either rocks or soil. A full elemental analysis of a particular sample required about 10 hours. The color camera imaged the spot where the analysis was carried out. The chemical data returned included some surprises, such as rocks with sufficient SiO2 that quartz appears in their calculated "normative" mineral compositions, and with higher SiO2 than any of the known martian meteorites or any martian soils. Sojourner was originally designed to conduct a 7-day mission on the martian surface. After about 60 days, the batteries were depleted but the rover continued to operate during daylight hours by using solar power. The last contact with Pathfinder was on October 7, 1997. Loss of contact is believed to have been due to extremely low temperatures in the lander. Despite a few communication problems and minor glitches with the positioning of the APXS, Sojourner performed exceptionally well, far exceeding design expectations. TABLE 3.2.1 Characteristics of Sojourner
|
||||||||||||||||
|
BOX 3.3 Rover Characteristics Large rovers are highly sophisticated vehicles of the type considered in the context of various sample-return and other mission concepts developed in the 1970s and 1980s. They are, in general, conceived as being quasi-autonomous and capable of wide-ranging operations. The only examples of vehicles of this size to be employed were Lunokhod 1 and 2 (see Box 3.1), deployed on the Moon in the 1970s.
Minirovers are more modest, battery- and solar-powered vehicles developed in the context of the austere Mars mission concepts that were devised in the early 1990s. The smaller vehicles in this class might not, in general, be capable of travel far from their landing sites. Although direct communication with Earth, through an orbital relay, should be feasible for this class of vehicles, for a variety of reasons, some (e.g., Mars Pathfinder's Sojourner) may require their lander to act as a telecommunications relay. Clearly, direct communication is the preferred option. Sojourner (see Box 3.2) and Russia's Marsokhod fall at, respectively, the lower and upper ends of this size category. The Athena rover, originally scheduled to be carried to Mars in 2001 and now deferred until 2003, is of intermediate size, and is designed to have a lifetime of a year.
Microrovers are vehicles smaller than Sojourner and Athena that might be used to explore low-gravity environments or to deploy an instrument or instruments away from their parent lander. The lifetime ranges of these vehicles may be severely limited because their small size may render them unable to survive the temperature extremes found on many planetary bodies. A vehicle of this type is being developed by the Jet Propulsion Laboratory as one of NASA's contributions to Japan's MUSES-C asteroid sample-return mission (see Figure 3.2). This particular vehicle is designed to have an extended lifetime and will be able to hop as well as move on its wheels.
Nanorovers are the current technological frontier of rover design. Such devices will probably be restricted to operating within view of a lander, and their extremely small size will almost certainly limit their lifetime to less than a day in anything other than the most benign environment.
|
Another challenge to rover operations is knowing where the rover is with respect to features visible in orbital surveys. Images with a large range in scales (two or three orders of magnitude total) are required to place the immediate surroundings of the landing site into regional and global geological and geographical context. The most effective way to accomplish this is to collect descent images during landing. Such images may suffer some distortion because they will be taken through the landing-rocket plume. Nevertheless, it should be possible to design descent imagers so that they can collect the most important images prior to the ignition of the landing engines. The inclusion of a descent imager does, however, place technological constraints on the bus transporting the rover. But, these strictures are likely to be less stringent than the financial and programmatic constraints that would be encountered if surface operations required the support of a very high resolution imaging orbiter. The absence of very high resolution surface imagery (either from a descent imager or an orbiter) proved to be a major constraint on the day-to-day operation of the Mars Pathfinder mission, even though Sojourner never traveled more than 10 to 15 meters from its lander.
Future Developments
These technological, scientific, and operational requirements suggest that capable rovers on future missions must be fairly large. Furthermore, the requirement for significant autonomy is likely to be a major mass driver, suggesting the need for major development in four areas. These are the following:
- Reducing the total mass of the rover's mechanical systems to achieve a higher payload mass fraction;
- Designing autonomous navigation and control systems that require minimum mass;
- Designing scientific instruments that are both more capable and smaller than those currently in existence; and
- Devising and thorough field testing of operational procedures that integrate autonomous control with the scientific community's need to remain in the loop.
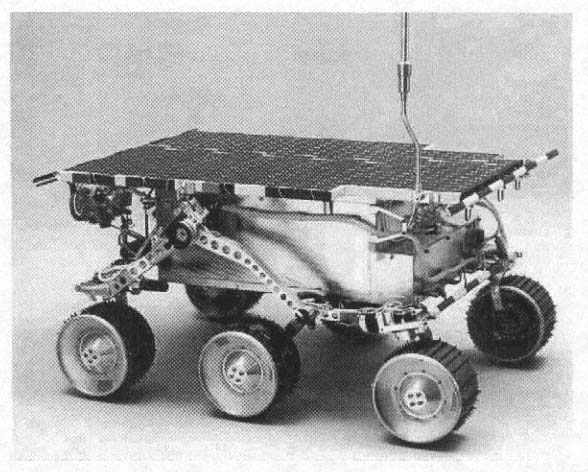
The Athena rover, scheduled to be deployed by a future Mars Surveyor mission, represents a significant step in achieving some of these objectives. Although it is similar in its mobility design to Sojourner, it is much larger and some 50 percent more massive (Figure 3.1). It is designed to have a lifetime of approximately 1 year (compared with 1 week) during which it will be able to traverse some 10 km (compared with 100 m). Athena's instrument complement is significantly more ambitious than that equipping Sojourner. According to current plans, Athena will have a 2-m-tall vertical boom carrying a panoramic camera and a thermal-emission spectrometer, and its robotic arm will be equipped with Mössbauer and Raman spectrometers, an alpha-proton x-ray spectrometer (APXS), and a microscope. The rover is also equipped with a drill to collect core samples up to 5 cm long from rocks and soils. Some 91 rock cores and 13 soil samples can be collected and cached for possible retrieval by a sample-return mission currently scheduled for the 2005 launch opportunity.
Rovers very much smaller than Sojourner and Athena have been considered.17,18,19 Although they are interesting design concepts, many researchers are skeptical and have argued that their payload capabilities, ranges, and lifetimes are likely to be limited and that such rovers, thus, are of less scientific value in the near term than their larger brethren.
Practical experience with the operation of such a vehicle will come with the deployment of a 1-kg microrover on asteroid 4660 Nereus in 2003. This vehicle (Figure 3.2), one of NASA's contributions to Japan's MUSES-C asteroid sample-return mission, is intended to carry a camera, an infrared spectrometer, and an alpha x-ray spectrometer derived from Sojourner's APXS. The microrover will use these instruments to conduct a number of investigations, including studies of the texture, composition, morphology, and lateral heterogeneity of Nereus's surface on scales smaller than 1 cm and investigations of the mechanical and thermal properties of the surface material. Although primary communications with Earth will be by a radio link to the MUSES-C orbiter, the microrover will also attempt to communicate directly to Earth by an optical system that makes use of the vehicle's laser range finder. Since the microrover is solar powered, its lifetime is, in principle, unlimited. In practice, its operational life will probably be set by effects of the thermal environment.
FIGURE 3.1
A size comparison between the Sojourner rover carried by Mars Pathfinder and the Athena rover originally scheduled to be carried by the Mars Surveyor 2001 lander. Athena has now been deferred to 2003. Courtesy of Daniel McCleese, Jet Propulsion Laboratory.
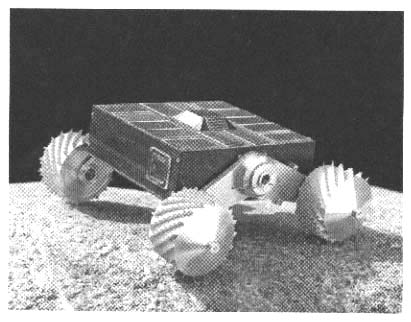
FIGURE 3.2
Recent advances in microtechnology and robotics have made it feasible to create extremely small rovers capable of operating on a variety of planetary bodies. This particular vehicle is designed to operate in a low-gravity environment and is scheduled to be deployed on asteroid 4660 Nereus by Japan's MUSES-C sample-return mission. This rover has a mass of approximately 1 kg and is highly maneuverable. By articulating its wheel struts, it can operate upside down, intentionally flip over and recover, place the body faces in contact with or parallel to the ground, lift the wheels and set them on top of obstacles, and reorient the body during ballistic ''hops" in an asteroid's feeble gravitational field. Courtesy of Brian Wilcox, Jet Propulsion Laboratory.
Hoppers
The former Soviet Union's Phobos 1 and 2 missions included unique hopping devices designed to provide mobility on the surface of the martian moon Phobos (see Box 3.4). Because both missions failed before these devices were deployed, their utility was never tested in situ. Hopping is practical on virtually any planetary body. Indeed, Surveyor 6 reignited its descent engines and hopped a distance of some 3 m across the lunar surface to enable pseudostereo imaging. A similar maneuver was also considered as part of a tentative plan to fly a spare Viking lander to Mars in the late 1970s. The technique is, however, most likely to be useful on small bodies with weak gravitational fields where hopping can cover large distances and thus provide significant mobility.
The MUSES-C microrover will have the ability to hop. This will be achieved by articulating the struts on which its four wheels are mounted. Surface inhomogeneities and uncertainties in the regolith's physical properties will result in uncertainties in the rover's point of impact and roving-hopping path. Nevertheless, the technology looks promising for the exploration of a range of low-gravity environments.
Touch-and-Go Orbiters
Another approach, resulting in a similar hopping motion, is the so-called touch-and-go orbiter. This technology has great potential for the exploration of low-gravity environments. For missions to bodies such as small satellites, asteroids, and comets, there is little distinction between orbiters, landers, and rovers. Once in orbit about such a body, it is energetically easy to land once or many times and thus, in a sense, to "rove" over its surface.
The Near-Earth Asteroid Rendezvous (NEAR) mission20 will conduct maneuvers essential to the success of more ambitious future missions that might employ the touch-and-go concept. In particular, it will use data obtained during a close flyby of asteroid Eros to estimate its gravity field and then take advantage of this information to go into orbit about Eros and probably land on the asteroid at the end of the mission. Although NEAR does not include sampling capability, it will collect valuable data while in orbit about Eros. Furthermore, the experience gained placing a spacecraft into orbit around a small body that most likely has a complex gravitational field will be valuable in the future. Additional important experience will be gained by Japan's MUSES-C asteroid sample-return mission, which envisions touching down more than once from orbit and effectively blasting fragments off the surface to be caught in collection bins on the orbiter-lander.
The science return from multiple landing or sample-return missions to one or more asteroids, small satellites, or comets is potentially very great. Thus, development of the touch-and-go concept is important.
Balloons
The former Soviet Union's Vega 1 and 2 spacecraft deployed balloons in Venus's atmosphere in 1985 (see Box 3.5). These drifted with the prevailing winds at fixed altitude in the atmosphere, surviving for almost two Earth days. The Soviet Union and later Russia, in cooperation with France, developed plans to deploy balloons on Mars as a part of the ambitious, but ultimately ill-fated, Mars 94–96 program. Indeed NASA's own ill-fated Mars mission, Mars Observer, and its successor, Mars Global Surveyor, were specially equipped to relay data from the balloons to Earth. Although the French-Russian balloon experiment was canceled for budgetary reasons, interest in planetary applications of balloons, as exemplified by workshops and ongoing studies, is second only to that for rovers.21,22,23,24,25 Although balloons are traditionally viewed as platforms for remote sensing and in situ atmospheric studies, their potential for new applications, such as surface sampling, is high, provided that a number of technological challenges can be overcome.
Buoyancy Technologies
Balloons are potentially valuable devices for study of the atmospheres of the four giant planets, and also for studies of the atmospheres and surfaces of Venus, Mars, and Titan. The two basic techniques for providing lift that are under consideration are these:
|
BOX 3.4 The Phobos Hopper The Phobos mission, launched by the Soviet Union in 1988, consisted of two identical spacecraft equipped to carry out detailed investigations of Mars and its small moon, Phobos. Although both spacecraft suffered failures before they could begin close-up studies of Phobos, the low-gravity environment of the small, asteroid-like moon enabled a unique lander architecture and approach to mobility. Each craft was equipped with a "hopper" lander that was to be jettisoned toward Phobos from a cruising height above it of ~50 m. The relative free-fall approach velocity of the 50-kg, semispherically shaped lander was designed to be a few meters per second.1 Upon touchdown on the surface of the moon, two mechanical rods, or levers, would release and work to position the lander so that its instruments faced Phobos's surface (Figure 3.4.1). Each hopper carried several instruments, including an x-ray fluorescence spectrometer, a magnetometer, a gravimeter, and a penetrometer.2,3 After measurements were made at one location, two spring-loaded "legs" would extend and the hopper would literally jump to a new location up to 20 m away, using no chemical propulsion. With each hop, the position control levers would correct the hopper's attitude after landing. The hopper was designed to sample 10 sites during its 4-hour, battery-powered lifetime.4  FIGURE 3.4.1 Hopping is an appealing means of providing mobility in a low-gravity environment. The former Soviet Union planned to use hoppers to undertake multipoint measurements on the martian moon, Phobos, in the late 1980s as part of the ambitious, but unsuccessful, Phobos program. Although their parent spacecraft failed before they could be released, these 60-cm-by-90-cm (approximate) hoppers were designed to leap from one site to another up to 20 m away and were outfitted with an array of scientific instruments, including an x-ray fluorescence spectrometer, a magnetometer, and a gravimeter. The two mechanical rods used to position the device are visible to the left of the semispherical hopper. This photograph of one of the engineering test models and its mounting adaptor (upper left) is courtesy of Valery Gromov and Alexander Zakharov.
|
|
BOX 3.5 The Vega Balloons Both Soviet Vega spacecraft carried payloads dropped at Venus en route to Halley's comet. Arriving at Venus in June 1985, Vegas 1 and 2 each released a spherical capsule that descended into the planet's atmosphere to deploy a surface lander and an atmospheric balloon. The balloons were fully deployed at an altitude of 50 km and floated to their equilibrium altitude of 53.6 km. The Vega balloons are the only meteorological balloons used thus far in solar system exploration. Constructed of Teflon fabric, the balloons were 3.4 m in diameter and weighed 12 kg. When filled, each Vega balloon carried 2.1 kg of helium and a payload of 6.9 kg on an instrument gondola suspended below the balloon by a 13-m tether. The gondola carried pressure, light, and temperature sensors, a nephelometer cloud sensor, and an anemometer (Figure 3.5.1). Both the anemometer and the temperature sensors  FIGURE 3.5.1 This diagram illustrates the general arrangement of the instruments carried by the balloons released into Venus's atmosphere by the former Soviet Union's Vega spacecraft in 1985. Illustration reprinted, adapted, from R.S. Kemnev et al., "Vega Balloon System and Instrumentation," Science 231:1409, 1986. Copyright © 1986 by the American Association for the Advancement of Science. |
|
were mounted on a deployable arm that extended perpendicular to the vertically hung gondola to minimize the influence of the radiant heat from the gondola and to provide the best vantage for the anemometer.1 The equilibrium altitude was chosen in part for its benign temperature during the night on Venus, which averages 305 K. The balloons began their trek at 180 degrees longitude, 7 degrees north and south of Venus's equator, respectively. Both balloons operated for 46.5 hours, passing into the day side of the planet 33 hours after deployment. They traveled more than 11,000 km, with Vega 1 going slightly farther, covering 109 degrees of longitude, just 4 more degrees than its successor, Vega 2.2 The balloons alternated between 25 minutes of data gathering (often taking measurements every 90 seconds in order to conserve power) and 5 minutes of Earth-relay.3 The Vega balloons were tracked interferometrically by an international array of antennae that included NASA's Deep Space Network.4 Both balloons fulfilled nearly all of their planned science objectives. Engineering data indicated that at the end of the mission only 5 percent of the helium had been lost, consistent with estimated diffusion through the Teflon. Although the balloons were expected to fail once they passed into the planet's day side, they proved more robust. Signal loss is attributed to battery exhaustion (the batteries were designed for a nominal 50-hour operating lifetime).
|
- Use of gases inherently less dense than the ambient atmosphere (primarily for application on Venus, Mars, and Titan); and
- Heating of the ambient atmosphere (primarily for application on Jupiter, Saturn, Uranus, and Neptune).
Current development efforts in the United States are focused primarily on the first technique and, in particular, on the use of so-called reversible fluids as a means to provide elevation control. This technique makes use of the buoyancy provided by two fluids. One fluid remains in the gaseous state at all ambient temperatures. The other alternates between gas at low altitudes and relatively high temperatures and liquid at high altitudes and relatively low temperatures. By providing a container for the reversible fluid that can be closed or opened on command, it is possible to control the equilibrium altitude of the balloon.26
A series of some eight Altitude Control Experiment (ALICE) flights, conducted by NASA between July 1993 and September 1997, validated the basic concept of the reversible-fluid balloon. Interest in this technology is not confined to the United States; relevant work has also been conducted in France and Japan. An alternate solution to the problem of elevation control is to use a single-medium, superpressure balloon that maintains a constant-density altitude.
The second lifting technique is embodied in the infrared Montgolfiere balloon. This concept involves the use of the upward infrared radiation from the planet's surface or lower atmosphere to heat ambient gas within the balloon.27 This requires that the top of the balloon consist of an infrared-reflective outer surface and an infrared-absorbing inner surface.
Extensive terrestrial testing of this concept has been conducted by France's Centre National d'Études Spatiales, with some 30 test flights flown between the late 1970s and the early 1990s. Altitudes greater than 30 km were attained, and the longest flight lasted more than 65 days.28 A series of test flights conducted in the United States
in 1997 demonstrated an altitude-control mechanism that will allow this type of balloon to conduct repeated precision soft landings. Although planetary application of this technology has focused on the outer planets, it has some potential for use on Mars. While flights in the mid-latitudes would be limited to daylight hours because of the low nighttime temperatures on Mars, flights in the polar summers could be of extended duration.
Aerobots
A balloon with one or more of the following characteristics is termed an "aerobot":29
- Autonomous position, altitude, and velocity determination without ground intervention;
- Altitude control capability;
- Ability to execute a designated flight path in a planetary atmosphere using altitude change and global wind patterns; and
- Landing capability at designated surface sites.
Such characteristics mean that aerobots are to entry probes as orbiters are to flyby spacecraft.
Scientific and Technological Requirements
Conceptual development for the placement of an aerobot in the atmosphere of Venus is fairly mature, and relevant test flights have been carried out on Earth. At present, it appears necessary to provide for significant (as much as 60 kilometers) repeated vertical motion of the balloon to provide for adequate cooling of the avionics and instruments if the aerobot is to descend into the lower atmosphere or to the surface of Venus. This vertical movement is an asset for many science objectives, such as vertical sampling of atmospheric composition, thermal structure, and dynamics. A balloon operating at a range of altitudes also allows for the gathering of optical and near-infrared images and spectra of the planet's surface at a variety of spatial resolutions.
In addition to altitude control, other desirable characteristics that would enhance the efficient operation of balloons and aerobots include these:
- Navigation. Knowing the three-dimensional position of the balloon at any given time is crucial for many observations. The Vega balloons were, for example, tracked by Earth-based radio telescopes using techniques of very long baseline interferometry.
- Horizontal control. The ability to predict and, preferably control, horizontal movement of the balloon would be highly desirable, because selected sites are generally of greater scientific interest than random sites. Some control over the traverse route could be attainable by taking advantage of different wind speeds and directions at different attitudes.30 However, even if the desired diversity exists in an atmosphere, it could require several exploratory balloon missions to understand atmospheric dynamics sufficiently well to use this technique. Political problems aside, recent unsuccessful attempts to circle Earth in balloons highlight how difficult it is to control balloon flight paths even with the relatively greater knowledge of atmospheric dynamics available for this planet. Thus, for the foreseeable future, balloon traverses on other planets will not be controllable.
- Touchdown. The ability to touch down is important because it would allow study of the atmospheric boundary layer structure, permit sample collection, and provide for soft deployment of geophysical or atmospheric surface stations.
- Long lifetimes. Balloons that can survive for weeks rather than the Vegas's 2 days are important for sampling the atmosphere and the surface over a wide geographic range. Longer balloon lives also provide a synoptic view that is important for many studies, particularly those of planetary atmospheres.
These attributes are as applicable to a Mars balloon as to a Venus balloon, except that there is no technology-driven need to move vertically for cooling and communication. However, Mars presents its own technological challenges because of its thin atmosphere. It is not clear at present that a Mars balloon with a significant payload
can attain altitudes necessary to clear the highest volcanoes on the planet. This would restrict a balloon mission to latitudes selected to avoid these volcanoes or to a short lifetime.
Advantages and Disadvantages
In addition to their use for studying atmospheric composition, structure, and dynamics, balloons also provide a means to obtain images and spectra of planetary surfaces at resolutions greater than those readily obtainable from orbit. Aerobots almost certainly provide the only platform capable of obtaining images at visible wavelengths of any substantial fraction of the surfaces of Venus and, in the more distant future, Titan. Other advantages are the long travel distances that are possible, the ability to control elevation (and perhaps even to touch down), and propulsion without the need to transport fuel from Earth.
Although balloons have many attractive features, they also have a number of important disadvantages. Some, such as navigation and the difficulty in controlling flight path, are discussed above. An important issue to be faced in the planetary application of balloons is that their size is proportional to their payload mass. Thus, the ability to carry a significant complement of scientific instruments will necessarily be constrained to keep the balloon's size within reasonable limits. Size is likely to be a particularly important factor for those balloons designed to be deployed in low-density atmospheres (e.g., Mars) or at high elevations on other bodies. Another disadvantage is, ironically, a consequence of the balloon's inherent advantages as a platform for high-resolution imagery and spectroscopy, which generate such large volumes of information that necessary data rates may stress the uplink capabilities to, and on-board memory of, a relay orbiter.
Future Developments
Several development thrusts are clearly called for, which include the following:
- Studying the use of reversible fluids for altitude control of balloons on Venus and Titan;
- Studying methods to attain altitude control with an infrared-heated balloon in the atmospheres of the giant planets;
- Designing science instruments that are of significantly smaller mass than those currently available; and
- Devising techniques to increase data rates by at least an order of magnitude.
Aircraft
An alternative to balloons for use on Mars in the mid-term future is lightweight aircraft.31 Small, unmanned aircraft are used for high-altitude (20 to 30 km) research in Earth's atmosphere. Indeed, there is currently great interest in the potential application of remotely piloted vehicles (RPV) for a host of commercial and military applications on Earth. Much of the current activity in this area is centered on the development of technologies such as autonomous control systems, high-energy-density batteries, and lightweight propulsion systems. Conceptual studies for planetary aircraft to date have been directed at adapting terrestrial RPV technology for use on Mars, where the aircraft would fly at low elevations. Present models envision aircraft of 35 to 200 kg with wingspans of 6 to 15 m. These aircraft are potentially capable of carrying payloads of 3 to 10 kg for thousands of kilometers.32 In order to do this, the aircraft must travel at relatively high speeds (~100 m/sec).
Advantages and Disadvantages
Planetary aircraft could provide multiband spectral data and images of the surface at higher resolutions than those currently attainable from orbit around Mars. They would be particularly effective for collecting oblique images of volcanic features, layering in canyon walls, and the laminated terrain found in Mars's polar regions.33 In the distant future, aircraft could obtain similar data for Titan, where atmospheric opacity severely limits collecting such data from orbit. In addition to these advantages, which are shared with aerobots, an aircraft's
traverse route is controllable. Aircraft are comparable to balloons in ability to collect useful atmospheric data, but because of high speed and short flight duration, extended synoptic measurements will be much more difficult. However, an aircraft can also be flown to features of particular interest (e.g., the poles or canyons), if desired.
The practical application of aircraft to planetary exploration faces a number of technical challenges. It is not clear, for example, what propulsion system is best. A variety of power sources, including liquid fuels (hydrazine), solar cells, and radioisotope thermoelectric generators, have been investigated,34,35 but batteries are now favored.36 Because the vehicle must enter the martian atmosphere in an aeroshell with a shape completely unlike that of an aircraft, it will be necessary to design a collapsible structure (at least the wings must fold). Studies performed in the late 1970s centered on aircraft that could be folded to fit inside a 4-m-diameter Viking aeroshell. More recent studies have involved aircraft that could fold up inside 2-m-diameter Mars Pathfinder aeroshells and even 0.2-m aeroshells designed for the Deep Space 2 microprobes.
Navigation and control systems capable of dealing with high-speed flight must be developed. Finally, it is essentially impossible for the data to be relayed directly to Earth during flight. Thus, a relay satellite would be needed. Even then, the volume of data that can be collected by a low-flying aircraft might be a problem. If data rates of a megabit per second are achievable, as is likely, then data storage on the relay satellite may become a significant limiting factor (although memory technology is advancing at a rapid rate). Both aircraft and balloons will suffer from this potential technological shortfall.
Future Developments
The potential value of an aircraft capable of flying in the martian atmosphere makes further development of this concept desirable. In addition, in common with balloon development, a major effort is needed to increase data rates substantially and, in common with virtually all other modes for attaining mobility, it is essential that a major effort be undertaken to increase the efficiency and decrease the mass of payload instruments. COMPLEX notes that the issue of data rates is not unique to missions using mobility or to solar system exploration missions. Other branches of the space-science enterprise (particularly the Earth sciences), as well as military and commercial communications and remote-sensing communities, are facing similar operational limitations due to restricted data rates. Synergistic cooperation between these various groups is encouraged.
Cryobots
Current interest in the possibility of a liquid water ocean beneath the icy crust of Europa has spawned early conceptual models for devices capable of penetrating through several kilometers of ice. The basic concept of such a vehicle, a cryobot, is relatively simple: a small device containing a heating element is placed on the surface and allowed to melt passively through the ice.
Cryobots are conceptually similar to the so-called thermal or Philberth probes developed more than 30 years ago for polar and glacial studies on Earth.37,38 By the late-1960s, a thermal probe developed at the U.S. Army's Cold Regions Research and Engineering Laboratory had penetrated more than 1000 meters into Greenland's ice cap before additional progress was prevented by the length of the available tether.39 Although further development of the concept was conducted in the 1980s,40 it has fallen out of favor as the technology for deep drilling has been perfected.
Interest in the possible use of thermal probes in extraterrestrial environments has prompted some limited experimental studies of the applicability of this technology with and without a vacuum to cryogenic ice. The application of this technology for the exploration of the martian polar caps has been considered. The Mars Polar Pathfinder Discovery mission concept envisages the use of a 22-cm-long thermal probe to measure the thermal profile and conduct optical measurements of the ice to a depth of some 150 m in Mars's northern polar cap.41
An exciting analog for Europa exists on Earth; about 4 km beneath the surface of the antarctic ice cap is a large body of water, Lake Vostok, that is about the size of Lake Ontario. It is likely that both the ice above Lake Vostok and the lake itself harbor microorganisms that have been isolated from the active Earth's atmosphere and hydrosphere for a very long time, perhaps for as long as 105 to 106 years.42,43 Whether the ice and the putative water
mantle on Europa also harbor life is one of the primary questions to be answered by a cryobot mission. However, these devices require significant development, both in the purely technical area and in dealing with problems of contamination.
Advantages and Disadvantages
The cryobot may be simple in concept, but there are a host of practical problems. Holes melted in the ice will, of course, freeze behind the cryobot, raising the important technical issue of communication: by tether or by acoustic waves? For Lake Vostok, a tether will probably be best, but for the much colder and probably thicker ice crust on Europa the choice is less straightforward. Technical difficulties for both tethers and acoustic communication devices on Europa will not easily be overcome.
The intense radiation environment on and near Europa requires that the electronic components of instruments on the cryobot be radiation hardened and possibly shielded as well. It also is a technical challenge to position the cryobot and initiate the melting process. This is a serious issue for Europa, because the cryobot cannot remain in the hostile surface radiation environment for very long. One possible way to minimize the cryobot's exposure to radiation on Europa's surface is to deploy it by a penetrator rather than a conventional lander. Even so, some form of communications infrastructure will have to remain on the surface. Overall, the technical challenge of a cryobot designed to penetrate to Lake Vostok is significantly less than that for the Europa cryobot.
The issue of biological contamination is essentially the same for both Lake Vostok and Europa. It is critical that neither cryobot transport Earth-surface microorganisms into the ice or into the water below the ice. If these devices contaminate the ice and water, the primary purpose of these efforts will be compromised. It is not clear that significant progress has been made toward a solution to this problem.
Future Developments
Despite these serious problems, the potential science returns of successful cryobot missions to both Lake Vostok and to Europa are so great that development of the cryobot concept should continue. Areas to be studied include modification of the thermal-probe technology to accept a radioactive heat source, radiation hardening of electronics, the development of techniques to reduce biological and chemical contamination, and improving communicating over distances of tens of kilometers with and without tethers. These studies should be carried out by a consortium of scientists and engineers, many of whom will not be directly associated with NASA.
Sample Acquisition
A review of the various documents outlining plans for future space exploration is sufficient to gain a sense of the importance of sample acquisition.44 These sample-acquisition plans cannot succeed unless devices capable of collecting samples are present on landers and, even more importantly, on mobile platforms.
A variety of techniques for sample acquisition have been pioneered in the last 30 years of planetary exploration. The first such device was employed by Surveyor 3 in 1967. It was equipped with a robotic arm, which dug trenches in the lunar regolith and carried out tests on the regolith's physical properties. The first robotic sample collection was accomplished in 1970 by the Soviet spacecraft Luna 16, which collected and returned samples from Mare Fecunditatis on the Moon. Luna 20 returned samples from the Apollonius highlands in 1972, and Luna 24 returned a core sample of regolith from Mare Crisium in 1976. Also in 1976, Viking 1 and 2 landers used jawed scoops on the ends of booms to collect samples of martian soil and deliver them to instruments mounted on the lander. In 1981, the Soviet spacecraft Venera 13 and 14 successfully collected samples from the surface of Venus for in situ x-ray fluorescence analysis, using drills mounted on the base of the landers.45 Also worthy of mention are the 3-m rotary-percussive coring drills used on the Apollo missions. Although they were hand-operated by the Apollo astronauts, the technology was fully amenable to robotic control.
The sample acquisition devices employed to date can be divided into the three following categories:
- Robotic arms for positioning other devices;
- Tools for both chipping and scraping; and
- Devices for trenching, drilling, or coring.
All of these devices contribute to the overall purpose of collecting samples for delivery to the lander or mobile platform carrying them, or to a cache for future collection.
Robotic Arms
Robotic arms, such as were present on the Viking landers (see Box 3.6), serve a variety of purposes. At a minimum, these devices permit placing instruments on or adjacent to selected soils or rocks. The Mars Polar Lander, scheduled to touch down on the northern edge of Mars's southern polar cap in 1999, for example, will be equipped with a 2-m robotic arm with a microscope camera at its tip. Similarly, the Mars Surveyor 2001 lander may be equipped with an arm designed to collect soil samples and deliver them to instruments for analysis.
With claws or scoops attached, robotic arms become capable of collecting soil samples or small rocks for delivery to instruments on the lander or rover. An arm of some sort is almost certainly needed for positioning other sample acquisition devices. It is difficult to imagine how many of the objectives of future missions could be accomplished unless robotic arms are included.
Chipping and Scraping Tools
For many objectives of space exploration, it will be necessary to remove the thin rind of weathered material that commonly is present on rocks. These rinds can exist on bodies with atmospheres, where they are due to chemical weathering, but also on bodies without atmospheres, where they are due to various processes of space weathering. Most analytical instruments, such as the alpha-proton x-ray spectrometer (APXS) on Sojourner, are capable of penetrating only to depths of a few micrometers.46 Although the compositions of these weathered rinds are of great interest, they will not, in general, provide a reliable inventory of the elements present in the fresh material. This problem is common to efforts to determine compositions of solid materials on terrestrial planets, asteroids, rocky and icy satellites, and comets. Thus, the development of satisfactory devices for removing the rinds is extremely important. A coring drill is one possibility, but this will not, in general, produce a fresh surface against which a robotic arm can readily place an instrument such as an APXS or a "hand lens." Thus, chipping or scraping tools may be necessary even if a coring device is available.
The simplest devices for removing a weathered rind would be either hammers or chisels that can break chips off the rock, or a hardened device that can grind or scrape the rind away. Of the two approaches, the chippers seem best because they can also be used to obtain small samples from large rocks or exposed rocky or icy crust for which much other information can be obtained by in situ visual and multispectral analysis. However, chippers will jar the lander or rover, and for this reason a scraper may be the safer alternative.
Trenching, Drilling, and Coring Devices
Trenching implies the use of some sort of scraper or jawed scoop capable of digging into unconsolidated or loosely consolidated surface materials. Drilling involves rotary devices that cut or auger into rock, ice, or regolith. Coring involves collecting a cylindrical sample of material by means of a rotary coring drill or, for regolith, a driven coring tube. All three of these technologies have been used in past space missions; trenching by the Viking landers, coring by Luna 24, and drilling by Venera 13 and 14.
Trenching and coring are useful for obtaining samples of regolith from below the surface and for gaining knowledge of shallow regolith stratigraphy. Coring has the potential for collecting samples from greater depth than digging and has the great advantage of collecting a sample with its stratigraphy preserved. Trenching, on the other hand, produces a cross section of the surface layers that can be readily seen using cameras, and thus potentially permits the collection of in situ visual stratigraphic data without the need to return the sample to Earth.
|
BOX 3.6 The Viking Arm Several planetary spacecraft have employed sampling arms during surface operations. The Soviet Luna missions, for example, used a drill on the end of an arm to collect core samples for return to Earth, and Surveyor 3 used a trenching device on a telescopic arm to test the physical characteristics of the lunar regolith. The Soviet Venera and Vega landers on Venus also made use of an arm and drill apparatus to collect material for analysis. However, so far the most elaborate and sophisticated arm and sample collection device used in robotic exploration flew on the U.S. Viking landers. The Viking landers were stationary science stations on the surface of Mars.1 Touching down on Mars on July 20th and September 3rd, 1976, respectively, each lander was equipped with an assembly that could collect samples from around the lander for delivery to science experiments on the lander. The nominal sample acquisition area was a 15-m2 sector in front of the lander. The Viking sample collection assembly consisted of a head attached to a 3-m furlable boom (Figure 3.6.1). The boom was constructed of two thin sheets of metal fused at the edges that became stiff when  FIGURE 3.6.1 Both of the Viking landers were equipped with a 3-m boom terminating in a collection head (inset) used to gather soil samples. Rather than being a rigid rod, the boom was constructed of two thin sheets of metal fused at the edges in such a way that they became stiff when extended. The arm was free to move in azimuth and elevation, and its extension could be varied by rolling up excess boom material inside the housing it its base. The collector head was connected to the boom by a wrist joint that could rotate through 180 degrees. The collector's 4.45-cm-wide jawed scoop was equipped with a movable upper lid and a backhoe attached to the bottom. The hoe was used to excavate shallow trenches and the upper lid served as a sieve. Illustrations courtesy of the Jet Propulsion Laboratory. |
|
extended. When the full extension of the boom was not required, the unnecessary length would roll up inside the arm housing at the base of the boom. The arm housing had two degrees of freedom in addition to boom extension: it could swing in azimuth (yaw), and it could vary its elevation angle (pitch). The collector head was connected to the boom by a ''wrist" that was flexible in pitch and could rotate 180 degrees to turn the collection head upside down. The collector head consisted of a jawed scoop 4.45 cm wide2 with a movable upper lid and a backhoe attached to the bottom. The hoe enabled the excavation of shallow trenches from which subsurface samples could be taken, and it served as a tool for attempting to chip rocks. The lid top was a metal sieve with 2-mm-diameter holes, designed to deliver sifted samples to the instruments. The Viking sample collection assembly successfully:
Despite efforts to the contrary, Viking did not:
The forward scoop motion of the Viking arm, in combination with its limited force (approximately 210 N through boom extension), most likely limited its ability to scratch or chip a rock for a sample. Additionally, the sensitivity of the arm to the slope of the collecting area constrained the limits of trench depth. Because the Vikings landed in an above-average rocky area of the martian surface, the inability of the sampling arm to deliver pebbles to the lander housing for analysis is not fully understood;4 however, the problem is believed to have been rooted in some combination of the actual landing sites (the local versus the general area) and the collector design. It should be noted, however, that there was never any requirement for the arm to collect pebbles or to chip rocks. Its only requirement was to collect soil samples. The fact that it was able to roll rocks, dig trenches, and collect duricrust clods was due purely to the clever operation of the arm and the flexibility in commanding that the engineering design enabled.
|
A trenching device can also transfer samples of unconsolidated material to instruments for analysis. Both technologies are important for sampling regoliths on planets, asteroids, and satellites, and possibly for sampling comet cores.
Drilling and coring into hard rock or ice is a difficult technology, especially if the goal is to obtain relatively undisturbed core samples from the holes. Coring maintains the petrologic and stratigraphic context of samples, whereas drilling produces a locally mixed sample. Mixtures are, however, easier to manipulate autonomously than cores, and some oven-based, in situ instrumentation works better with locally mixed materials. On Earth, drilling
with sample return, either as chips or as complete cores, is a highly developed technology, but it generally involves the use of large volumes of water and heavy drilling mud. The technology for shallow drilling and coring from landers or rovers currently exists. Indeed, the Athena rover will, according to current plans, be equipped with a drill capable of extracting core samples up to 5 cm long from boulders or bedrock. However, given the present volume, power, and reliability constraints, drilling can acquire samples from greater depths than can coring. Indeed, the drill for the Champollion/Deep Space 4 comet nucleus mission is designed to collect samples from depths 20 times greater than Athena's coring drill. Moreover, Champollion's drill is designed to carry an optical fiber to permit in situ examination of the bore hole.
It is not at present clear how drilling to depths much greater than a few meters can be accomplished. Some NASA-supported research is being performed to automate a small oil-well-type, deep-drilling rig. Other approaches under development include a small, tethered boring device that pulls itself into regolith, a miniature inchworm drill, and a pile-driver concept.47
Penetrating to depths of meters or perhaps tens of meters is a critically important technology if we wish to address one of the primary objectives of solar system exploration—the evaluation of Mars as a site for extant or fossil life. It is necessary to sample below Mars's highly oxidized surface layers to have any chance of finding extant life, and this may require the capability of drilling through regolith to depths of at least several meters.48 Similarly, deep drilling may be important if we wish to search for evidence of extant or past life at a depth comparable to that associated with known terrestrial ecosystems, e.g., hydrothermal vents. Another prime environment for seeking evidence of past life on Mars will be a site believed to be underlain by deposits of an extinct lake.49 Although it is possible to collect subsurface samples from such a site in the ejecta of impact craters formed since the lake disappeared, drill-core samples would be much more satisfactory because the material collected will come from known depths and will preserve local stratigraphy.
Three-dimensional sampling is important for a number of additional objectives. If the rock or ice being drilled preserves a stratigraphic record, then a drill-core sample will reveal changes in composition and other properties as a function of time. Furthermore, if weathering is an important process, then a drill sample will permit detailed chemical analysis of the weathering processes because effects of these processes will gradually disappear with distance from the present surface.
Although not yet used on a mission, penetrators have potential as a low-cost means of acquiring samples. Traditional penetrators are designed to be dropped by an orbiter or by a lander during descent and deliver impact-resistant instruments to the shallow subsurface. Penetrators, such as the Deep Space 2 microprobes to be deployed by the Mars Polar Lander, are designed to orient themselves such that a reinforced tip strikes the surface as nearly vertically as possible, so that the lower part of the device penetrates the surface but the upper part does not. A sample-collecting penetrator could be deployed by a rover or lander. In this application, a pyrotechnic device shoots a tethered projectile into the ground. A sampling device is then pulled out of the projectile and collects material as it is reeled back to the surface. Once emptied, the sampling device could, in principle, be reloaded into another projectile and armed with a new pyrotechnic charge, and then could collect another sample at a new location.50
Terrestrial Field Demonstrations
It is essential that spacecraft systems be thoroughly tested before being sent into space. Rovers, balloons, and aircraft (and their complements of manipulative devices) must be tested to be certain that they will function as desired under stressful conditions. Likewise, the instruments carried by these platforms need to be tested both before and after they are mounted on their platforms. Finally, the total systems, including human operators, must undergo testing under conditions as similar as possible to those to be experienced on other solar system bodies.
Various balloon and aerobot concepts have undergone field testing on Earth in anticipation of deployment on Venus, Mars, or Titan.51 Rovers have been tested extensively for many years; important recent examples include tests of the Mars Pathfinder Sojourner rover using a simulated Mars surface environment, and the field tests of Rocky 7 at Lavic Lake, California,52 and of Nomad in the Atacama Desert of Chile.53
Marsokhod Field Tests
An instructive series of tests involved the use of the Russian Marsokhod rover. Three field trials have been completed: at Amboy Lava Field, California, in 1994,54 on Kilauea volcano, Hawaii, in 1995,55 and near Tuba City, Arizona, in 1996.56 For the first of these, the operations were centered in the Los Angeles area, and for the other two, at NASA Ames Research Center, Moffett Field, California.
The Marsokhod field demonstrations were full operational tests designed to determine all aspects of the rover's operations and the interactions between its operators and a team of scientists attempting to interpret the data collected. As such:
- The localities and traverses were selected to determine the physical ability of the rover to negotiate terrains believed to be good analogs of conditions on Mars.
- The instruments and peripheral devices carried by the rover were evaluated.
- The ability of science teams to interpret correctly the geology of a site was tested because the specifics of the sites were not known by these teams in advance.
- The ability of the various individuals and teams to coordinate activities and communicate with each other was tested.
In general, the Marsokhod proved able to negotiate the terrain at each of the three test sites. The science teams did reasonably well in interpreting the local geology, but all of them missed some specific features that were present. Much was learned with each day of testing that resulted in significant improvements in operations during the next day. On the other hand, communication and coordination problems significantly hampered operations during some of these demonstrations. This problem is discussed in the report of the first demonstration, in which it is stated that science, engineering, and operations objectives were competing for time and resources. The same problem still existed during the third test. In short, many of the same things were "learned" over and over again.
Some of the recommendations from the first demonstration were put into effect for later demonstrations. For example, the terrain types were different for each test, as recommended. Additional science instruments and capabilities were added, such as the ability to obtain color and close-up images and the placement of a "hand lens" (a microcamera) on the manipulator arm. These devices were used during the third test but, unfortunately, not all of them functioned satisfactorily. True multispectral images could not be obtained because the camera was out of focus in many wavelengths. Moreover, the depth of field of the hand lens was so limited that it was not possible to interpret the pictures with any confidence. This experience highlights the need to test thoroughly the payload instruments and peripheral devices before they are placed on a mobile platform for a full field test or, more critically, before launch of a space mission.
Lessons Learned from Sojourner Operations
Operation of the Sojourner rover on the Mars Pathfinder mission also provided opportunities for field testing, both on Earth (operational readiness tests) and in the martian environment. The insights and lessons from these exercises are important. During the mission, the rover traversed a total distance of approximately 100 m in the immediate vicinity of the lander over a period of 82 martian days.
Mars Pathfinder was not equipped with a descent imager, and it quickly became apparent that a birds-eye view of the landing site was needed. Various teams attempted to construct rectified contour maps and virtual-reality displays for rover navigation purposes, with mixed success. Autonomous navigation involving point-to-point traverses, and techniques for finding and avoiding rocks, were tested. These techniques, however, did not always operate successfully because of software and communications link problems, errors in uplinked commands, and difficulties encountered in moving across loose soil and sand. Moreover, the cameras mounted on Sojourner did not have sufficient resolution for navigational purposes.
The lessons learned from Pathfinder emphasize the difficulties in operating rovers without benefit of real-time observation and execution of commands. Future rovers that operate outside the line of sight of a lander (which can
provide images from an elevated perspective, plus a fixed frame of reference) will encounter considerable problems if they do not have rapidly produced maps and flexible navigation tools. Capable imaging systems (both descent and rover-mounted) are necessary, as are improvements in autonomous navigation systems and communications. Scientific goals that require ranging over tens or hundreds of kilometers may be difficult to accomplish except in cases of relatively unchallenging geologic terrains. These views are echoed by the Mars Surveyor 2001 Science Definition Team (SDT), whose report comments that the lack of a satisfactory robotic field capability, even when the vehicle is under the full control of mission scientists, is "somewhat sobering."57 The SDT ascribes the limitations not to the rover hardware, but to the following:
- Lack of experience;
- Limitations in imaging resolution and in the coverage that low-bandwidth communications permit; and
- Lack of software to allow scientists to quickly and fully visualize the data that are returned.
Future Need for Field Demonstrations
It is clear that field demonstrations are essential. One area of particular importance is the operational integration of autonomous and direct control systems. A sophisticated rover should, in principle, be able to make observations while traversing from one predetermined location to another and use the results of the observations to select the most scientifically interesting route to take. Recent field tests have demonstrated that this capacity does not yet exist even when scientists have full control of the rover.58 Limited communications windows and available bandwidth will, necessarily, limit the degree to which mission scientists can have direct control over the planning of the rover's operations. Without some degree of autonomous control during the periods when it is not in communication with Earth, the rover is likely to spend a significant fraction of its operational life waiting for instructions. With the twice-daily communications sessions scheduled for future Mars Surveyor missions, this downtime could amount to 90 percent. Field demonstrations offer a ready means to develop and validate schemes for autonomous operations and to develop techniques for their harmonious integration with the limited periods when mission scientists will be in the control loop.
What also is clear is that the usefulness of field demonstrations will be greatly enhanced if better continuity exists between tests so that problems exposed in one test are not "forgotten" during the planning of subsequent tests. Many of the problems of this type that arose in the various rover tests conducted to date were related to people and operational systems rather than to the rovers themselves. These problems are, therefore, likely to be universal with respect to mobile platforms or mission objectives. Operational problems experienced by the Sojourner team (e.g., the fact that it took them much longer than planned to maneuver the rover from one rock to the next) could have been anticipated and planned for had there been better communication of field-test results. A mechanism needs to be devised to ensure that important operational problems are known and acted on by all groups. Adequate peer review of proposed operational tests and the prompt publication of the results of those tests in peer-reviewed journals are essential.
References
1. Space Studies Board, National Research Council, An Integrated Strategy for the Planetary Sciences: 1995–2010, National Academy Press, Washington, D.C., 1994.
2. Roadmap Development Team, National Aeronautics and Space Administration, Mission to the Solar System: Exploration and Discovery—A Mission and Technology Roadmap, Version B, Jet Propulsion Laboratory, Pasadena, Calif., 1996.
3. Extensive compilations of references to developments in rover technology can be found on the home pages of the following organizations: the Robotics Institute <http://www.ri.cmu.edu> at Carnegie Mellon University, the Artificial Intelligence Laboratory <http://www.ai.mit.edu> and the Field and Space Robotics Laboratory <http://robots.mit.edu> at the Massachusetts Institute of Technology, the Mobile Robotics Department <http://www.sandia.gov/Robotic_Range> at Sandia National Laboratories, and the Rover and Telerobotics Program <http://robotics.jpl.nasa.gov> at the Jet Propulsion Laboratory.
4. D.S. Pivirotto and W.C. Dias, United States Planetary Rover Status, JPL Publication 90-6, Jet Propulsion Laboratory, Pasadena, Calif., 1989.
5. C.R. Weisbin, D. Lavery, and G. Rodriguez, Robotics Technology for Planetary Missions Into the 21st Century, Jet Propulsion Laboratory, Pasadena, Calif., undated.
6. Report of the Planetary Instruments Workshop, LPI Technical Report 95-05, Lunar and Planetary Institute, Houston, Tex., 1995.
7. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
8. Space Studies Board, National Research Council, Review of NASA's Planned Mars Program, National Academy Press, Washington, D.C., 1996.
9. D.S. Pivirotto and W.C. Dias, United States Planetary Rover Status, JPL Publication 90-6, Jet Propulsion Laboratory, Pasadena, Calif., 1989.
10. Space Studies Board, National Research Council, Review of NASA's Planned Mars Program, National Academy Press, Washington, D.C., 1996, p. 15.
11. Centre National d'Études Spatiales, Missions, Technologies and Design of Planetary Mobile Vehicles, Cepadues Éditions, Toulouse, France , 1993.
12. C.R. Weisbin, D. Lavery, and G. Rodriguez, Robotics Technology for Planetary Missions Into the 21st Century, Jet Propulsion Laboratory, Pasadena, Calif., undated.
13. R. Greeley and P.E. Thomas, eds., Mars Landing Site Catalog, NASA Reference Publication 1238, 2nd Ed., National Aeronautics and Space Administration, Washington, D.C., 1994.
14. Report of the Planetary Instruments Workshop, LPI Technical Report 95-05, Lunar and Planetary Institute, Houston, Tex., 1995, p. 106.
15. Report of the Planetary Instruments Workshop, LPI Technical Report 95-05, Lunar and Planetary Institute, Houston, Tex., 1995, p. 94.
16. Office of Space Science, National Aeronautics and Space Administration, Report of the Mars 2001 Science Definition Team, National Aeronautics and Space Administration, Washington, D.C., 1997, p. 10.
17. D.S. Pivirotto and W.C. Dias, United States Planetary Rover Status, JPL Publication 90-6, Jet Propulsion Laboratory, Pasadena, Calif., 1989.
18. C.R. Weisbin, D. Lavery, and G. Rodriguez, Robotics Technology for Planetary Missions Into the 21st Century, Jet Propulsion Laboratory, Pasadena, Calif., undated.
19. Space Studies Board, National Research Council, Review of NASA's Planned Mars Program, National Academy Press, Washington, D.C., 1996, p. 15.
20. A.F. Cheng, "Near-Earth Asteroid Rendezvous: First Launch of the Discovery Program," abstract, in Lunar and Planetary Science Conference XXVI, 1995, p. 239.
21. C.R. Weisbin, D. Lavery, and G. Rodriguez, Robotics Technology for Planetary Missions Into the 21st Century, Jet Propulsion Laboratory, Pasadena, Calif., undated.
22. Final Report of the Workshop on Mobility, NASA Ames Research Center, Moffett Field, Calif., 1995.
23. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
24. Space Studies Board, National Research Council, Review of NASA's Planned Mars Program, National Academy Press, Washington, D.C., 1996.
25. Reports presented at the Mars Balloon Science Working Group meeting, January 1996, U.S. Geological Survey, Menlo Park, Calif.
26. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
27. Reports presented at the Mars Balloon Science Working Group meeting, January 1996, U.S. Geological Survey, Menlo Park, Calif.
28. P. Malaterre, "Vertical Sounding Balloons for Long Duration Flights," Advances in Space Research 14(2): 53, 1994.
29. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
30. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
31. V.C. Clarke, A. Kerem, and R. Lewis, "A Mars Airplane?" Astronautics and Aeronautics, January 1979, pp. 42–54.
32. Matthew G. Hutchinson and John S. Langford, "Jason: An Aircraft Platform for the Martian Atmosphere: A Report to National Aeronautics and Space Administration and the Jet Propulsion Laboratory," Aurora Report 9303, Aurora Flight Sciences Corporation, Manassas, Va., 1993.
33. J. Minear et al., "Final Report of the Ad Hoc Mars Airplane Science Working Group," JPL 78–89, Jet Propulsion Laboratory, Pasadena, Calif., 1978.
34. Development Sciences Inc., "A Concept Study of a Remotely Piloted Vehicle for Mars Exploration," JPL-955012, Jet Propulsion Laboratory, Pasadena, Calif., 1978.
35. A.J. Colozza, "Preliminary Design of a Long-Endurance Mars Aircraft," American Institute of Aeronautics and Astronautics Paper 90–2000, 1990 (available online at <http://powerweb.lerc.nasa.gov/psi/DOC/mppaper.html>).
36. Matthew G. Hutchinson and John S. Langford, "Jason: An Aircraft Platform for the Martian Atmosphere: A Report to National Aeronautics and Space Administration and the Jet Propulsion Laboratory," Aurora Report 9303, Aurora Flight Sciences Corporation, Manassas, Va., 1993.
37. K. Philberth, "Une Methode pour Measurer les Temperatures à l'Interieur d'un Inlandsis," Comptes Rendus des Seances de l'Academie des Sciences 254: 3881, 1962.
38. H.W.C. Aamot, "Instrumented Probes for Deep Glacial Investigations," Journal of Glaciology 7: 321, 1968.
39. K. Philberth, "The Thermal Probe Deep-Drilling Method by EGIG in 1968 at Station Jarl-Joset, Central Greenland," in Ice-Core Drilling, J.F. Splettstoesser, ed., University of Nebraska Press, Lincoln, Neb., 1976, p. 117.
40. B.L. Hansen and L. Kersten, "An in Situ Sampling Thermal Probe," in Ice Drilling Technology, G. Holdsworth, K.C. Kuivinen, and J.H. Rand, eds., CRREL Special Report 84-34, Cold Region Research and Engineering Laboratory, Hanover, N.H., 1984, p. 119.
41. D.A. Paige et al., "The Mars Polar Pathfinder," Discovery Program Workshop, San Juan Capistrano Research Institute, San Juan Capistrano, Calif., September 1992.
42. J.C. Ellis-Evans and D. Wynn-Williams, "A Great Lake Under the Ice," Nature 382: 644, 1996.
43. A.P. Kapista et al., "A Large Deep Freshwater Lake Beneath the Ice of Central East Antarctica," Nature 381: 684, 1996.
44. Roadmap Development Team, National Aeronautics and Space Administration, Mission to the Solar System: Exploration and Discovery. A Mission and Technology Roadmap, Version B, Jet Propulsion Laboratory, Pasadena, Calif., 1996.
45. Yu.A. Surkov et al., "Determination of the Elemental Composition of Rocks on Venus by Venera 3 and Venera 14 (preliminary Results)," in Proceedings of the 13th Lunar and Planetary Science Conference, Part 2, published as Journal of Geophysical Research 88 (supplement), A481, 1983.
46. Report of the Planetary Instruments Workshop, LPI Technical Report 95-05, Lunar and Planetary Institute, Houston, Tex., 1995.
47. S. Gorevan et al., "Rover Mounted Subsurface Sample Acquisition Systems," Space Technology 17: 231, 1997.
48. National Aeronautics and Space Administration, An Exobiology Strategy for Mars Exploration, NASA SP-530, National Aeronautics and Space Administration, Washington, D.C., 1995.
49. National Aeronautics and Space Administration, An Exobiology Strategy for Mars Exploration, NASA SP-530, National Aeronautics and Space Administration, Washington, D.C., 1995, p. 24.
50. S. Gorevan et al., "Rover Mounted Subsurface Sample Acquisition Systems," Space Technology 17: 231, 1997.
51. J.A. Cutts et al., "Planetary Exploration by Robotic Aerovehicles," Journal of Autonomous Robots 2: 261, 1995.
52. R.E. Arvidson et al., "Rocky 7 Prototype Mars Rover Field Geology Experiments: 1. Lavic Lake and Sunshine Volcanic Field, Calif.," Journal of Geophysical Research—Planets 103: 22671, 1998.
53. W. Whittaker et al., "Atacama Desert Trek: A Planetary Analog Field Experiment," in Proceedings of the 1997 International Symposium on Artificial Intelligence, Robotics, and Automation for Space (i-SAIRAS '97), Tokyo, Japan, July 14–15, 1997.
54. R. Greeley et al., "Science Results from the Marsokhod Tests, Amboy Lava Field, Calif., 1994," Proceedings of the International Planetary Rover Symposium, Russia, 1994.
55. C. Stoker and B.P. Hine III, "Telepresence Control of Mobile Robots: Kilauea Marsokhod Experiment," American Institute of Aeronautics and Astronautics, Reno, Nevada, January 1996, available online at <http://img.arc.nasa.gov/~sims/AIAA.Stoker.html>.
56. G.E. McGill, "Commentary on Desert 96 Marsokhod Rover Test, November 1996" (unpublished manuscript).
57. Office of Space Science, National Aeronautics and Space Administration, Report of the Mars Surveyor 2001 Science Definition Team, National Aeronautics and Space Administration, Washington, D.C., 1997, p. 11.
58 Office of Space Science, National Aeronautics and Space Administration, Report of the Mars Surveyor 2001 Science Definition Team, National Aeronautics and Space Administration, Washington, D.C., 1997, p. 11.

























