
B
Current Sensor Capabilities and Future Potential
To clarify the advantages and limitations of individual sensor characteristics, as well as the requirements that these characteristics may place on the performance of a tactical network-centric sensor grid, this appendix discusses each major sensor class in some detail, and it describes current state-of-the-art, likely paths for future growth. To contain the discussion, the sensors participating fully in the grid, that is, those used for surveillance, reconnaissance, and sensor-to-shooter targeting, are emphasized over those dedicated to a single weapon such as a gun control radar. Actually the only major difference between the two types of sensors lies in the relatively short-range and subsecond response requirements of the weapon’s terminal phase, which contrasts with the long-range, seconds-to-minutes response requirements for surveillance, reconnaissance, and targeting. The fundamental technology characteristics are the same for all applications—only the detailed design parameters differ.
B.1 RADAR
Microwave sensors represent the dominant class of air/land battlespace sensors. Inevitably orders of magnitude physically larger than optical sensors with equivalent resolution, microwave radar easily compensates for this size disadvantage with its long-range, all-weather, “imaging” capabilities. As a result, every Navy platform has several radars: for search, navigation, missile fire control, gun fire control, target illumination, and so on.
Although there are still mechanically scanned, microwave tube-powered radars on naval platforms, modern radar implementations, both surface-based and
airborne, are uniformly configured as electronic-scan, phased-array architectures with all-solid-state microwave power generation. The SPY-1 Aegis radar, the workhorse of the cooperative engagement capability (CEC), represents a pioneering naval implementation of a phased-array radar, albeit with a conventional centralized microwave tube power source. With four fixed-array faces, its electronic scan provides 360° coverage for ship self-defense via search, track, and weapons control.
Today, the Navy is considering the development of at least four new radars—the multifunction radar (MFR), an X-band radar for short-range ship defense; the volume search radar (VSR), an L-band radar for medium-range search and cueing to replace the SPS-49; the high-power discriminator (HPD; an X-band radar for ship-based theater missile defense); and a possible future long-range multifunction C/S-band replacement for the current Aegis radar. All are envisioned to be electronic-scan, phased-array architectures with active monolithic microwave integrated circuit (MMIC) solid-state transmitter/receiver (T/R) modules.
These surface platform-based sensors are capable of producing “images” of the surrounding air and sea surface space in the traditional radar sense of a georeferenced “map” of the estimated locations of significant observed returns. For an isolated radar, operating in a platform-centric mode, the precision with which the locations of these target reports are defined is of mixed quality—for although a radar usually can provide high-precision range and Doppler measurements, the angular precision is generally poor because of the large radar wavelengths and the dimensions of practically sized radar antennas. Beam widths measured in degrees or finite fractions of degrees are not uncommon. At the range of the target, even for modest ranges of 10 or 20 km, the positional uncertainty perpendicular to the radar beam could be measured in tens to hundreds of meters, whereas the range uncertainty along the beam direction could be less than 1 m. Exploiting the combined measurements of a number of dispersed radars immediately provides a quantum jump in radar-imaging capability without any change in the participating radars’ operational characteristics.
Synthetic aperture radar (SAR) accomplishes much the same thing with a single radar sensor, in a different way—by moving it, with a crucial difference in the point of view—looking down rather than up. When an airborne radar is moved along a linear path and appropriate sequential measurements are made from a number of different spatial positions, the accumulated data can be combined in such a way as to duplicate the performance of a virtual antenna equivalent in size to the distance the platform flew during the collection of the data. The resulting radar images of the ground are of “optical quality,” with uniform meter to submeter resolution in all dimensions, and can be obtained over large surface areas, at ranges up to hundreds of kilometers, through almost any kind of weather. SAR sensors are currently available in the battlefield on joint resources such as the Joint Surveillance and Target Attack Radar System (JSTARS) (APY-3), the
|
Box B.1 Hot Topics in Radar Today
|
U-2 platform, and the Global Hawk unmanned aerial vehicle (UAV), with future plans for space platforms (e.g., Discover II).
Real-time SAR requires enormous amounts of computational power, from gigaflops to teraflops. In the past, computers with this kind of throughput were large and deployable only on the ground. Early air- or space-based SARs were forced to transmit the raw data to dedicated ground stations for rapid, but not necessarily real-time, availability of the images. Fortunately, computer technology today has advanced to the point where the necessary computational throughput can be provided, in sufficiently small size and weight and low enough costs, to be deployable directly on the UAV or aircraft for real-time SAR.
Current thrusts in radar technology are described in Box B.1.
B.1.1 Radar Performance
B.1.1.1 Resolution
Because radar frequencies support large bandwidth signals and long pulse duration, the range measurement capabilities of radar can be quite good—tens of meters to meters or centimeters, if desired. If classification is of interest, hundreds of megahertz of bandwidth might be employed to get a resolution of a few centimeters for automatic target recognition (ATR), whereas in air traffic control (ATC), where only detection and general location of targets are necessary, range resolution might be relaxed to as much as 100 m, leading to a narrow-bandwidth, much cheaper radar. Similarly, ground moving-target indicator (GMTI) radar, using Doppler techniques, can detect radial motion as slow as 1 or 2 km/h.
In angle, radar beams are typically on the order of a degree or so, which corresponds to antenna dimensions of 60 wavelengths or larger. For X-band (i.e., 10 GHz), a 1° beam width antenna would be 1.8 m across, whereas at L-band (i.e., 1 GHz), it would be 18 m. Of course, bearing estimates are not limited to these dimensions, for with a large enough signal-to-noise ratio, beam-splitting interferometric techniques (e.g., monopulse) can estimate directions to small fractions of the beam width.
B.1.1.2 Field of View and Field of Regard
Although the generation of multiple simultaneous physical beams from a phased-array radar is possible, operational radars are never operated in this mode, but rather explore their environment one beam at a time.
In a conventional, mechanically scanned radar, the beam position is fixed relative to the antenna and thus provides a very restrictive instantaneous field of view (IFOV) equal to the beam width, which for typical radars is measured in fractions of a degree to several or even several tens of degrees. The field of regard (FOR), on the other hand, represents the angular portion of space over which the radar may be pointed by steering the antenna. In a sense, this is a design parameter, and mechanically gimbaled radars, which can rotate a complete 360° in azimuth and tilt up from horizontal to 60° or 70° or even 90° (the zenith), have been built.
Phased-array radars, on the other hand, can electronically scan their beams over a wide IFOV, without any mechanical assistance. In practice, deviation angles of up to ± 60°, in any direction off the axis of the array, are readily obtainable, with some compromise in performance at the larger angles because of beam-spreading “squint” effects. All four of the new phased-array radars now under consideration for missile defense will have an IFOV of this magnitude for each single face. For a fixed array, the IFOV and FOR coincide. To expand the FOR of a phased array, two approaches are commonly followed. One simply expands the radar to include individual fixed faces for each azimuthal quadrant and further tips each array face up so that both the horizon and the zenith directions fall within the IFOV capability of the face. This is the approach used by the current Aegis SPY-1 and will no doubt be the design adopted for the future MFR and VSR radars. An alternate approach, which may produce an advantageous cost/performance trade-off in some circumstances, uses a hybrid mechanical-electronic concept. Raytheon’s HPD theater missile defense radar, for example, which is an evolution of the existing theater high-altitude area defense (THAAD) ground-based radar (GBR), has only a single array face. The array is mounted on a gimbaled platform that is mechanically steered to provide IFOV coverage of the full hemispherical FOR.
SAR radars address their fields of view and regard in quite a different manner because of the way the raw data are collected. Imagery is generated in a
swath parallel to and offset from the flight path of the plane, and the resolution achieved can be varied from high to low by contracting or expanding the width of the swath. Or small, very-high-resolution “snapshots” can be taken anywhere from the minimum to maximum range that the radar can address transverse to the flight path—some SARs support a mode in which the transmitter beam is kept focused on a small region of interest as the plane flies past. The FOR of a SAR depends on the product of the maximum-to-minimum usable range of the sensor and the speed of the plane, whereas the IFOV is highly variable and can vary from low-resolution imagery of the whole swath to a very-high-resolution snapshot of a small portion of the FOR, typically the same number of pixels per second—a trade-off between resolution and search rate.
B.1.1.3 Range
The range capability of a radar is somewhat of a design parameter, as it varies with implementation parameters such as transmitter power, the microwave wavelength (e.g., S-, C-, X-band), antenna dimensions, detector sensitivity, and the like, as well as the scattering cross section of the intended target set and perhaps some environmental variables. Radars are thus deliberately designed to meet their mission requirements. Surface-based air search radars like the SPS-49 can detect targets 200 to 300 nautical miles away in any direction, and presumably the VSR will be designed with similar specifications. Airborne surveillance radars, such as the APS-145 early warning radar on the Hawkeye E-2C, reach out even farther, to as much as 600 nautical miles, although the JSTAR’s SAR is capable of imaging areas at a range of up to 250 km (~140 nautical miles) transverse to the flight path.
B.1.1.4 Geopositioning Accuracy
A single traditional radar, whether phased array or not, has poor geolocation capabilities because, although its range measurement uncertainty can be very small if its signal bandwidth is large, e.g., centimeters to a few meters, its angular resolution is always poor in practice because of the limited aperture sizes available; e.g., 0.1° to 1° or 2° beam widths are typical. A 0.1° beam width at 10 km range gives a transverse target location uncertainty of ±8.5 m, which grows to ±85 m at 100 km range.
Combining two or more such radars, in a network-centric warfare (NCW) or CEC-like cooperative mode, immediately reduces the combined position location uncertainty to values on the order of the range resolution—degraded by the nonradar problems of determining the individual radar positions accurately via the Global Positioning System (GPS) or some other way. The ultimate limit on geolocational position accuracy is very likely to be dominated by the GPS accuracy of several meters, rather than the inherent capability of the individual radars.
The geopositional accuracy of SAR sensors is also controlled by the fundamental resolution of the imagery, which can be flexibly varied between broad swaths with tens of meter resolution to small snapshots with submeter resolution, as well as the GPS difficulties of determining the absolute location of the SAR platform at any given time. On the other hand, SAR ground imagery is of such quality that cross-correlation with highly accurate National1 imagery may permit sensor resolution-limited performance to be achieved.
B.1.1.5 Area Coverage Rates
Search radars—whether mechanically scanned or phased array, ATC, or military—scan the full 360° upper hemisphere out to many hundreds of nautical miles in about 5 to 10 s. If a nominal 450 km range and a 6-s sweep interval, similar to that of the SPS-49, are chosen, the corresponding area coverage rate would be about 105 km2/s—a very high rate of coverage—but the resolution is also quite low. Very typically, a primary search radar is designed to encounter and be able to detect and locate up to several thousand candidate targets during a single full azimuth sweep.
Surface-threat, self-defense radars, such as the MFR, try for a faster, approximately 1-s update rate and are horizon-limited to line-of-sight (LOS) ranges of a few tens of kilometers. Assuming a 20 km range and a 1-s sweep, the area coverage rate would be about 1.2 × 103 km2/s—two orders of magnitude less than that of the long-range search radar, but no doubt done with much higher spatial resolution—more pixels per square kilometer.
Theater defense radars do not try to search large areas and so have minuscule area coverage rates. These radars are designed to detect, track with high accuracy, and classify incoming threats with their decoys and are cued to small IFOV baskets, within which the targets have been localized by other wide-area coverage sensors. Typically only a few tens of objects are expected to be found in the IFOV.
SAR sensors can generate low-resolution images of kilometer-wide swaths at the velocity of the airplane or trade this for a number of high-resolution snapshots using the same number of pixels generated per unit time. JSTARS according to the press is capable of mapping (at unspecified but low resolution, no doubt) 1 million km2 in 8 hours, which translates to an area coverage rate of about 35 km2/s, which is not high when compared with ordinary search radar performance. It is also claimed that the Global Hawk’s SAR will be able to survey, in 1 day, with 1 m resolution, an area equivalent to the state of Illinois (40,000
square nautical miles), which translates into a fairly low rate of 1.6 km2/s, a rate compatible with high-resolution imaging. For example, if we hypothesize a platform velocity of 200 m/s and a 10 km swath to be imaged by a SAR at 1 m resolution, all of which sounds quite reasonable, the resulting area coverage rate would be 2 km2/s at a pixel rate of 2 × 106 pixels/s.
In contrast to Global Hawk, the Discover II program is targeting a much more capable, spaceborne SAR with a pixel rate of about 20 × 106 pixels/s.
B.1.1.6 Communication Data Rate Requirements
Building on the information above, it is possible to estimate the communication data rate loads implied by the different classes of radar sensors.
Non-SAR radars, as mentioned before, produce highly preprocessed images, with the information data rate heavily reduced through the simple expedient of reporting only “hits”—an elementary form of ATR. If sampling at a particular beam position (i.e., a dwell) finds no candidate target returns of significance, nothing is reported for that “pixel.” A typical report will necessarily consist of a number of digital words describing target location parameters, such as bearing and range, or Kalman filter coefficient updates of information—altogether as many as twenty 32-bit words may be necessary for a worst-case total of 640 bits per report.
Thus a search radar, which may encounter as many as 2,000 targets on a single, 6-s, 360° scan, would require a maximum communication bit rate capability of about 200 kbps—although operating ATC radars often see no more than 500 targets at a time and often transfer the reports at 50 kbps over ordinary telephone lines. Horizon search radars, such as the MFR, with their horizon-limited range capabilities, expect to encounter only a few tens to a hundred or so candidate targets to deal with and so, with a 1-s update rate, can expect to need minimal capabilities, similar to the ATC example above—i.e., about 50 kbps.
But SAR, the true imaging radar sensor that generates data for every pixel, without exception, will require much higher communication bandwidth capability in order to participate in a network-centric sensor grid—but not nearly as much as is required by a capable modern electro-optical camera, as discussed in the section on electro-optical sensors (Section B.2). Practical SAR sensors produce pixel information at rates comparable to what is implied by the Global Hawk performance capability described above under “Area Coverage Rates” (Section B.1.1.5). Each second, an area of 1.6 km2 is to be sampled at 1 m × 1 m resolution, leading to a pixel rate of 1.6 × 106 pixels/s, which is fairly typical of such systems. Assuming that the location information is implicit in the raster format by which the images are read out, each pixel will need no more than one 16-bit word (or even less) on average for an output reporting data rate of about 25.6 Mbps—which does indeed resemble the requirements of high-quality optical cameras, albeit at the low end of the requirements. Here again, it would be
useful to be able to apply some automatic information extraction algorithms via local processing, so that only the compressed, salient information would have to be passed over the network-centric sensor grid communication infrastructure.
B.1.1.7 Spectral Issues
Different portions of the microwave spectrum are used by different classes of radars, not so much for acquiring additional target-background characteristics for ATR, as is the case with optical sensors, but more often to resolve implementation-application trade-offs. For example, an X-band radar at 10 GHz can achieve the same angular resolution as an L-band radar at 1 GHz with a 10 times smaller antenna. And so X-band is often preferred for high-accuracy applications or for missile seekers where aperture is at a premium. Similarly, the search rate capability of a radar is proportional to the product of the transmitted power and the area of the antenna. In addition, since low-frequency radars need large physical antenna in order to maintain even modest angular resolution and microwave power is much easier to generate at the lower frequencies—e.g., one can obtain T/R modules with hundreds of watts capability at 1 GHz of L-band whereas the current state of the art produces only about 10 W for an equivalent X-band module at 10 GHz and much less than 1 W for frequencies of 35 GHz and beyond—search radars are always L-band or lower.
B.1.1.8 Environmental Interactions
With few exceptions, radars are “all-weather,” long-range, imaging sensors and for these capabilities they are highly valued. Radar frequencies are, in fact, absorbed and scattered to a minor extent by atmospheric constituents, but not nearly to the extent to which these same obstacles obstruct electro-optical systems. Rain certainly introduces attenuation, but ordinary radars, operating in the 1 to 35 GHz range, suffer very little performance degradation as a result. The effects are the same for fog, dust, and clouds.
Only as the frequencies move up into the millimeter range (i.e., 40 to 50 GHz or higher) do serious atmospheric absorption effects appear. Although there is interest in millimeter radars for short-range precision guidance applications, no broad situation awareness roles for them have yet been found, so these limitations are unlikely to have any impact on network-centric operations issues.
B.1.1.9 Susceptibility to Countermeasures
Clearly radars are susceptible to a variety of countermeasures. Jamming is effective, and all military radars are designed with this possibility in mind. As active sensors, radars inevitably emit radiation, thereby inviting physical attack by missiles like the high-speed antiradiation missile (HARM). For a single radar,
operating in a platform-centric mode, often the only protection is to shut down, and the countermeasure has proven effective. On the other hand, with cooperating, distributed radars, as would be characteristic of a network-centric configuration, such a counter may be ineffective as only local portions of the network of sensors need be temporarily shut down, while the rest of the network continues to track the threats. Stealth techniques applied to aircraft have proven effective against many radars. However, very-low-frequency radar, because of size resonance effects, may have certain advantages in the detection of such targets, although perhaps with poor localization capabilities. More interestingly, since a large part of stealth technology depends on the exploitation of geometries that reflect the incident radar waves away from the transmitter, rather than scattering them back, bistatic approaches offer interesting counterstealth possibilities. Radiation scattered away from the transmitting radar may well be receivable by another radar receiver on the battlefield, and this kind of cooperative behavior is just what the network-centric sensor grid concept is going to encourage!
B.1.2 Technology Trends and Future Growth in Radar
B.1.2.1 Digital Radar
One of the most exciting developments in radar today is the vigorous push of digital techniques into many areas that have been traditionally analog (see Box B.1). The idea of a “digital radar” promises increased flexible performance, microelectronic compactness, and reduced costs.
Originally radar was based entirely on analog components and techniques—transmitter, antenna, receiver, and signal processing with the results output as analog inputs to a video display. Eventually, analog-to-digital conversion was introduced at the output of the receiver, and digital signal processing has now been a regular feature of high-performance radars for at least several decades. Exploiting the exponential explosion in computer technology, digital signal processing has permitted the continuing introduction of powerful advanced signal processing algorithms (e.g., for space-time adaptive processing) as well as the implemention in real time of complex tasks (e.g., SAR) previously doomed to off-line processing. Other tasks, such as digital beam forming of phased arrays, even at the subarray level, have remained impractical up to the present.
But today, as digital clock rates move into the gigahertz range and computational capabilities grow from gigaflops to teraflops, digital beam forming, particularly at the subarray level, now appears feasible. The term “digital radar,” however, suggests much more than signal processing and beam forming. It now is possible to consider replacing many of the remaining analog radar components with much more compact, lower-cost digital equivalents—e.g., receivers, waveform generators, and so on. The idea is to move the analog-to-digital converter (ADC) away from the signal processor and as close to the front end of the radar
as possible—in the extreme, an ADC at every T/R element in the phased array. The transmit waveform would be generated digitally and the signal transported in digital form over fiber-optic data lines to the individual T/R modules where it is digitally delayed to achieve true time-delay phase shifting, passed through a digital-to-analog converter, amplified by the solid-state T/R module, and transmitted. After some filtering and low-noise amplification, the received signal would be digitized directly at the microwave frequency or after a single stage of down conversion, digitally delayed as appropriate, and sent via fiber optics to the digital signal processor where pulse compression, beam forming, space-time adaptive processing (STAP), and so on will be carried out at real-time speeds.
Figure B.1 illustrates the performance of current state-of-the-art ADCs. To date, all available ADCs fall more or less below the diagonal line, which represents a form of jitter limitation. Successful implementation of digital radar concepts requires performance above the jitter-limit line. Currently the Defense Advanced Research Projects Agency (DARPA) and others are investing heavily
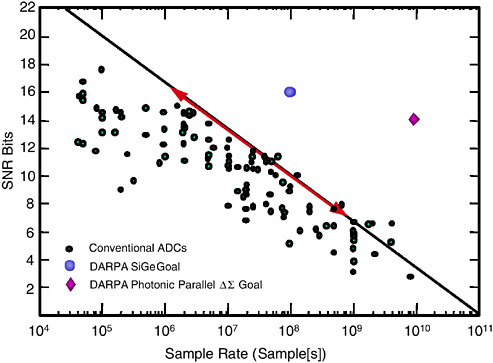
FIGURE B.1 State-of-the-art analog-to-digital converter (ADC) performance with current ΔΣ “breakthrough” targets indicated. SNR, signal-to-noise ratio. © Copyright 2000 Raytheon Company. All rights reserved. Reprinted with permission.
in finding ways to circumvent this apparent technology limit through the exploration of very-high-speed, so-called delta-sigma (ΔΣ) 1-bit sampling techniques, which are common and successful in high-fidelity audio today at much lower sampling frequencies. A few more bits above the line will make digital radar a reality.
The increases in performance and decreases in size and weight can be enormous—one study indicated over a 100-fold decrease in the volume of the receiver hardware by going from analog to digital. Key to reaching these goals is the development of high-bit, gigahertz sample rate ADCs that are compact, low power, and inexpensive. DARPA, the Office of Naval Research (ONR), and others are currently supporting major thrusts in this much-needed ADC technology, and one can expect to find radars with digital receivers, and perhaps digital beam forming and digital true-time delay, deployed within the next 5 years. Many radars today already employ digital waveform generation.
B.1.2.2 Array Architectures—Low-cost Transmitter/Receiver Modules
Phased arrays are expensive. If the total cost of the antenna structure is divided by the number of elements (i.e., T/R modules) in the antenna, costs of $1,000 to $2,000 per element are the norm. With 10,000 to 20,000 elements in a typical high-performance radar, such as MFR or HPD, the antenna alone can cost tens of millions of dollars.
The fundamental building block of a phased-array radar—the T/R module—is a complex device containing multiple GaAs integrated microwave circuits (e.g., MMIC amplifiers, phase shifters, and so on), digital circuits (e.g., controllers), microwave, digital and power interconnects, radiating elements, mechanical support and cooling structures, and so on. For performance reasons, this module must be packaged to fit into an area on the face of the antenna of only one-half wavelength by one-half wavelength—at X-band, this is only 1.5 cm in each dimension.
The development of MMIC technology over the past several decades has greatly reduced the costs for these chip components, through the adoption and extension of techniques from silicon integrated circuit manufacturing. Most of the remaining costs lie in the packaging, interconnects, assembly, and testing, and these aspects can be minimized by the use of highly integrated modular array architectures. So-called brick architectures, which are common today, meet the packaging challenge by building back along the third dimension away from the face of the array. Generally a modular structure is created with 4, 8, or 16 T/R modules built into a single integrated unit with integral power supplies and cooling. Costs for these highly integrated designs are now dropping to about $500 per element.
An alternate architecture, the tile array, attempts to meet the wavelength constraints by building directly in the plane of the antenna with unpackaged
ultraminiature components. A large subarray of 64 elements or more is created, not from individual T/R modules, but as a single monolithic structure in the form of a sandwich of functional layers (e.g., radiating elements, MMIC components, interlayer microwave, power and ground interconnects, distributed direct current (dc)-dc power converters, and so on)—generated largely by printed-circuit techniques.
These structures weigh very little and cost about $100 or less per element but are currently limited in power capabilities (e.g., a few watts per element) by the miniaturization requirements. It is hoped that progress in wide-bandgap semiconductors such as GaN can increase the power capabilities of the MMIC components to 5 or 10 W per element without increasing the size, making these architectures extremely promising and competitive, particularly for future airborne applications.
B.1.2.3 Real-time SAR
Air- or spaceborne synthetic aperture radar, with its high-resolution, all-weather, ground-imaging capabilities, complemented with a ground-moving target indication or GMTI mode, is unquestionably the premier land surveillance and targeting sensor on the battlefield. These capabilities are already available on the JSTARS, U-2, and Global Hawk and Predator UAVs; and further developments in hardware and software will permit more compact and versatile implementations, with efficient on-board real-time processing and extended capabilities for foliage penetration (FOPEN) and mine detection. In assessing its mix of organic versus joint sensors in the battlespace of the future, the Navy should carefully consider the merits of deploying its own SAR-equipped UAVs.
B.1.2.4 SiC and GaN High-power Devices
Although the modern high-performance phased arrays that are deployed or under development at present are uniformly based on GaAs or InP MMIC T/R technology, it has long been known that semiconductor materials with a larger bandgap than GaAs and InP are possible and would offer enormous benefits. Devices made from wide-bandgap materials could be operated at much higher temperatures and voltages than GaAs and InP and would be expected to show higher degrees of linearity. ONR has been in the forefront of this technology for years, and the community’s effort has begun to bear fruit in the last several years. Both SiC and GaN, originally valued for their ability to produce the blue light characteristic of their large bandgap, have shown great potential for high power generation of microwave energy. Although GaAs and InP devices produce less than 1 W/mm of gate periphery, GaN, in particular, has demonstrated as much as 3 to 5 W/mm. In a few years, today’s 10 W X-band T/R modules could be replaced by physically similar but much higher power GaN-based equivalents
with 50 or more watts of power output. Introducing this technology in tile array configurations could greatly increase the attractiveness of these lightweight, inexpensive architectures.
B.1.2.5 Distributed Radar
The CEC is an innovative Navy program that has decisively confirmed the expected benefits of distributed networked configurations, demonstrating precise geolocation, robust tracking, and extended area coverage. CEC, which in its original implementation coupled only identical SPY-1 radars, is now experimenting with the incorporation of other types of radar, e.g., Patriot and Airborne Warning and Control System (AWACS), into its meta-radar. Network-centric operations will extend these concepts to more flexible mixes of different kinds of sensors (perhaps combinations of active and passive radar) on an opportunistic and adaptive basis, leading to hybrid distributed sensors with exceptional capabilities.
B.1.2.6 Antistealth
Future efforts should consider distributed configurations where some of the radars operate in a passive mode, perhaps in a time-varying, adaptive way, so that the antistealth benefits of bistatic configurations might be realized. The use of low frequencies (i.e., below L-band) would enhance the detectability of the stealth targets, whereas the distributed cooperation would greatly mitigate the poor angular resolution and permit practical-sized antennas to be utilized without compromising the overall performance of the networked radars.
B.1.2.7 Foliage Penetration
Penetrating foliage is one of the tasks that suffer from fundamental physics-based obstacles. Low frequencies are needed to penetrate—whereas high frequencies are required for good spatial resolution and imaging from reasonably sized antennas. With the rapidly advancing maturity of SAR, it is now possible to create, in a quite practical manner, a very large virtual (synthetic) antenna for a low-frequency radar that neatly sidesteps the physical limitations of real antennas and permits both penetration and good spatial resolution simultaneously. Such a radar is currently under development and will soon be available.
For urban environments, passive millimeter-wave imaging offers interesting possibilities as it can image through single nonmetallic walls of ordinary thickness with surprising effectiveness, and at the same time the equipment required can be reasonably compact.
B.2 ELECTRO-OPTICAL SENSORS
Optics and radar share a common physical basis—both exploit the propagation of electromagnetic waves. Thus the fundamental equations relating such parameters as aperture size and signal bandwidth to beam widths and measurement accuracy of the sensors are the same for both disciplines. However, the portions of the electromagnetic spectrum exploited are completely different. Whereas radar wavelengths are measured in millimeters to centimeters and meters, optical wavelengths are orders of magnitude smaller—in the neighborhood of a micrometer, that is, 10−6 m.
Because of this profound difference in characteristic dimensions, optical systems are always far smaller than radar systems of equivalent angular resolution. For a radar to match the beam width of even a modest-sized optical system, its antenna must be about four orders of magnitude larger—centimeters for the optical systems implies hundreds of meters for the radar!
In addition to this striking size/performance advantage, electro-optical systems are often significantly simpler than radar systems to implement. Optical systems make prolific use of simple mirrors and lenses of common materials that are transparent in the visible and infrared, conveniently supplying the electromagnetic phase shifts needed for precision beam control and focusing; optical imaging detectors are sensitive to the point of being able to detect single photons; and multipixel detector focal plane arrays for imaging can readily be implemented with microelectronic fabrication technology.
Because of the high quality of optical imagery, and the ease with which very narrow optical beams may be generated from small apertures, optical sensors are common on the battlefield. Most military platforms support one or more electro-optical sensors. The majority are imaging sensors, which include charge-coupled device (CCD) cameras, electronically amplified low-light-level, night-vision equipment that operates in the visible; forward-looking infrared (FLIR) cameras; infrared search-and-track (IRST) surveillance systems; and three-dimensional imaging ladar. Among the nonimaging sensors are laser range finders, target illuminators, and remote laser chemical/biological detection systems.
The difference in physics between radio frequency (RF) and electro-optics (EO) brings some disadvantages as well, as many environmental constituents, such as rain, clouds, fog, and dust, which are relatively transparent at microwave frequencies, are frequently opaque in the optical regime due to absorption or scattering. Environmental effects thus seriously limit the usefulness of optical systems in many scenarios.
As a result, for top-level situation awareness, air defense, and ground targeting, radar sensors that can “image” at very long ranges through all kinds of weather are preferred. Optical sensors are used more often as adjuncts for acquisition of scene details when the weather is fair or when the ranges involved are short and high-resolution imaging is required, as in endgame precision targeting.
|
Box B.2 Hot Topics in Electro-Optics Today
|
Current thrusts in electro-optics technology are described in Box B.2.
B.2.1 Electro-Optical Sensor Performance
B.2.1.1 Resolution
Depending on the design details, i.e., the wavelength and the aperture diameter, passive imaging optical systems are characterized by pixel azimuth-elevation (az-el) dimensions from microradians to many milliradians. The corresponding pixel dimension on the objects to be imaged can vary from millimeters to tens of meters, depending on the range to the object and the angular characteristics of the optical system. Active laser-based EO sensors, both imaging and simple range finders, combine the excellent az-el two-dimensional resolution characteristic of all optical systems with the range accuracy of a radar. Three-dimensional resolutions of centimeters to meters, in all dimensions, are readily obtained over ranges of 1 to 10 km or more—weather permitting.
B.2.1.2 Field of View and Regard
Although optical configurations with a very large IFOV can be implemented, the optical design is challenging and the implementation hardware increases rapidly in complexity and cost as the IFOV increases. In addition, the finite size of the detector arrays permits only an equal number of scene pixels to be examined simultaneously. Thus to achieve the high-spatial-resolution performance for which optics is so valued, only a small IFOV can be examined at any instant. As a result of this kind of trade-off, typical fielded optical imaging sensors—both visible and infrared (IR)—are characterized by “narrow” fields of view (FOVs) of 1° or 2° in elevation and azimuth, whereas the “wide” FOVs are four or five times larger.
Traditionally, these rather small FOVs are extended to the desired much
larger FOR by the simple expedient of mounting the sensors on a gimbaled mount. Gimbaled optical sensors with ± 90° in azimuth and/or in elevation, or even with a full 360° azimuth capability, are common.
B.2.1.3 Detection
Modern imaging optical sensors use highly integrated, monolithic arrays of semiconductor detectors known as focal plane arrays (FPAs). As semiconductors, FPAs participate fully in the inexorable growth of the electronics industry, with the numbers of detectors on a chip increasing exponentially year by year. Today, silicon-based CCD arrays for visible imaging are available, with more than 106 detector elements on a single chip along with all the required readout circuitry. Infrared focal plane arrays, fabricated from more exotic semiconductor systems (e.g., InSb for 3 to 5 µm mid-wave IR, or HgCdTe for 8 to 14 µm long-wave), are not far behind, with 25,000-element (i.e., 512 × 512 pixels) FPAs already in such naval equipment as the Thermal Imaging Sensor System 3 to 5 mm surveillance sensor. The response times of all classes of FPAs are fast enough to permit signal readout at video rates (30 to 60 Hz).
B.2.1.4 Range
As pointed out above, practical optical sensors, whether passive or active, perform well only over relatively short ranges—typically 10 to 20 km at best. Line-of-sight requirements for high spatial resolution from small T/R apertures, as well as temporal variations in environmental obscurants, serve to limit the passive sensors. Active laser sensors share these same vulnerabilities and, in addition, suffer from the combination of relatively low available laser powers and small T/R apertures which, even in good weather, further limit range performance and severely restrict the sensors’ search capabilities. For these reasons, active laser systems typically have to be cued to the target neighborhood by another wider FOV system, optical or radar, in order to achieve reasonable target acquisition times.
These short-range characteristics relegate most electro-optical sensors to secondary and special-purpose roles in the battlespace.
B.2.1.5 Geopositioning Accuracy
The importance of knowing the sensors’ location to high accuracy—presumably by Global Positioning System (GPS) and/or an adequate Inertial Navigation System (INS) capability—has been discussed. To complete the picture, for the purpose of situational awareness a good, geographically consistent common operational picture (COP) must be generated by incorporating accurate location information estimates for features and objects observed and reported by the sen-
sor. Optical sensors are ideally suited for this because of their inherent spatial resolution—particularly when combined with a laser range-to-target. With appropriate calibration, optical sensor measurements can be localized easily relative to the sensor to submeter accuracy. In addition, the high-resolution complex scene structure, generally obvious in optical images, is ideal for correlation of these images with reference imagery (e.g., satellite resources) to obtain precise determination of absolute image point geolocation.
B.2.1.6 Area Coverage Rate
The area coverage rate at which an imaging optical sensor can collect data within its FOR is determined by the competition between a number of factors—the IFOV of the sensor and the number of pixels on its FPA, the rate at which the FPA is sampled, the speed with which the gimbals can slew the IFOV across the FOR, and the motion of the platform on which the sensor is mounted. In many forms of optical imaging cameras, the update rate greatly exceeds the gimbal slew capability, and so redundant images are collected and the area coverage rate is determined solely by the telescope slewing characteristics and the platform motion. The IFOV projected on the ground is determined by the number of pixels in the detector array and the pixel resolution. For example, if the pixel image on the ground is 1 × 1 cm and the FPA is square with 106 pixels, the IFOV would cover an area of only 100 m2. If the pixel size on the ground was 1 m2, the same FPA would result in an IFOV on the ground of 1 km2 or 106 m2. So slewing could produce area coverage rates as low as a few hundred or as high as a few million square meters per second.
Some optical sensors, such as IRST sensors and various airborne three-dimensional imaging ladars, generate their images by scanning a one-dimensional linear array of detectors across the optical image of the scene through internal mirror motions. Others simply use the platform motion (e.g., a UAV) to sweep the image of the detector array over the region to be imaged—a so-called “push-broom” scan. Both techniques can collect nonredundant pixels at the update rate of the FPA, so the area coverage rate is easily calculated from the size of the FPA image on the ground and the angular speed of the internal scan or the linear velocity of the push-broom platform. For example, if the image of the FPA on the ground is 100 m and the UAV velocity is 200 m/s, the area coverage rate will be 2 × 104 m2/s. If the linear FPA has, for instance, 2,000 elements (arrays as large as 10,000 elements are available and have been flown in high-resolution surveillance systems) and the frame update rate is 60 Hz, then 1.2 × 105 pixels are sampled per second with an average pixel area of 1/6 m2—the pixel dimensions on the ground would be 5 cm along the array and 3.3 m along the flight path. This hypothetical situation does not result in as high-resolution imagery as what one might hope to get from an optical sensor—for better results, the platform should fly more slowly.
Nonimaging optical sensors, since they typically measure the equivalent of a single pixel per measurement, have very little area coverage rate capability and are strictly limited by the repetition rate of the laser. For conventional laser range finders (YAG and related systems), this is often only one to several tens of sample per second—many fielded laser range finders operate in this regime. With the development of solid-state, diode-pumped monolithic YAG, “microchip” lasers, and their extensions, repetition rates as high as 500 or 600 Hz have been demonstrated, permitting much higher pixel sampling rates, although these rates are still far lower than the capabilities of the passive imaging sensors.
B.2.1.7 Communication Data Rate Requirements
As has been suggested, sensors that generate images—which is just what electro-optical sensors do best—produce raw data at prodigious rates. Current generations of infrared FPAs can have as many as 250,000 detectors (i.e., 512 × 512 detectors), whereas visible silicon-based CCD cameras have a million (e.g., 1 K × 1 K = 106) or more. Given the dynamic range of typical IR and visible scenes, the output of each pixel is commonly quantisized to 12 bits. With video frame rates of 30 to 60 Hz (which is, in fact, typical of both visible and state-of-the-art IR sensors), it takes only a simple computation to discover that such imaging sensors generate raw data at rates between 90 and 720 Mbps. Attempting to transfer this data throughout the network-centric sensor grid by means of general purpose communication links would be disastrous.
Somehow the raw data have to be processed locally to extract only the salient information that may be of interest to a fusion node or decision maker, and only this minimal critical information communicated. The simplest form of preprocessing may be to apply lossy data compression techniques—of say, 40 to 1—which would immediately reduce the requirements to a more manageable 2 to 20 Mbps, while retaining much useful information about the scene observed. On the other hand, modern video image compression techniques transmit only the image changes from frame to frame, achieving large compression ratios with little information loss. Even better would be to apply a powerful ATR technique (perhaps still to be discovered) and reduce the useful information to only a few words of data associated with a limited number of candidate “targets” or other interesting aspects of the scene. As is reiterated in the discussion of radar sensors, this is precisely what an ordinary air defense or air traffic control radar accomplishes with its elementary form of ATR processing, leading to communication requirements that are low enough that ATC radar reports are customarily passed over ordinary telephone lines at 50 kbps or less.
IRST and other imaging sensors, which may employ push-broom linear array scan rather than two-dimensional framing, generate data at a much slower rate, as the one-dimensional linear arrays generally have far fewer detector elements than the two-dimensional arrays. A state-of-the-art linear array may con-
sist of 10,000 or fewer detector elements. At 30 Hz sampling and 12 bits per sample, this kind of sensor generates raw data at more modest rates of 3 to 4 Mbps, which offers a more manageable communication burden, but which still may be further reduced by appropriate preprocessing.
Under many circumstances, sophisticated automatic information extraction techniques may not really be necessary, particularly for those two-dimensional FPA framing sensors that may be used for situational awareness, that is, for surveillance and reconnaissance, and that are of particular interest for integration into the network-centric sensor grid. This is because the sensor frame rates of 30 to 60 Hz clearly produce enormous amounts of redundant information which need not be transferred in total to other users in the grid. This high update rate is what is needed to refresh a display so the human eye detects no flicker, even if the image is completely static. The useful information in the scene, which may need to be communicated to another user, is determined by the dynamics of the scene itself—as, for example, through the motion of objects in the scene or changes in the lighting. In many scenarios, image update intervals of seconds, that is, frame sampling rates measured in fractions of hertz rather than tens of hertz, may be adequate, thereby reducing the raw data communication requirements by factors of 100 or more, even without sophisticated local processing.
Active imaging optical sensors, such as a rapid pulsed ladar that generates three-dimensional, range-to-pixel imagery, differ from the passive FPA imaging sensors just described in optical detector focal plane arrays, which are capable of simultaneous, independent, multiple time-of-flight measurements (i.e., need to define range-to-target at each pixel), do not yet exist—except perhaps as development items. In practice, it is not yet possible to collect such data in parallel. To date, such sensors have been operated sequentially, scanning the laser beam in some kind of raster pattern and collecting range-to-target samples at the repetition rate of the laser. If we suppose that we have a 1 kHz laser rate and each range-to-target report is a single 23-bit word, the raw data rate generated by the sensor would not exceed 23 kbps. Clearly, because of limitations in the current technology state of the art, active optical sensors currently are not capable of generating very high rates of raw data. But these are imaging sensors after all. And the kind of direct geometric information they can supply about candidate target objects permits promising implementations of efficient ATR algorithms—both template- and feature extraction-based. So it seems to be only a matter of time before the requisite technology is developed and the generation rate of raw data pushes to levels that also challenge the communication requirements.
Finally, nonimaging electro-optical sensors, such as laser range finders, are typically operated with one beam (i.e., pixel) at a time, at rates that can vary from “on-demand” to brief bursts at 1 to 20 Hz. Each report might include such information as range-to-target and perhaps a few other pieces of information, such as GPS location of the transmitter, azimuth from transmitter to target, reflected signal strength, and so on—in all, no more than a few tens of 32-bit words.
Except in highly dynamic weapons endgame situations, where the sensor-weapon coupling must be close and the data need not be communicated to other users in the sensor grid, it is difficult to believe that laser range measurements need be distributed any more often than at intervals of seconds. The resulting communication data rate requirements are minuscule—hundreds of bits per second or less!
B.2.1.8 Spectral Issues
The optical portion of the electromagnetic spectrum, stretching as it does from the ultraviolet, through the visible to the near, mid, and far infrared, encompasses a broad range of physical phenomena that can help alleviate some environmental obstacles in certain circumstances and that can be exploited to enhanced target detection and classification (e.g., ATR).
For example, although visible sensors respond only to reflected ambient light and are consequently signal starved at night, infrared systems detect the thermal radiation emitted by all the scene objects as well as reflected ambient and can produce visual-quality images at night as easily as in the daytime. Similarly, short wavelength light is scattered much more strongly than long wavelengths (e.g., the blue sky) so IR systems can often penetrate such obscurants as dust and smokes when visible cannot.
IR thermal images often indicate more about the scene than visible imagery; e.g., operating vehicles can be distinguished from nonoperating vehicles by the observable effects of the engine heat produced, and often objects that are well camouflaged in the visible show measurable contrast with the local scene background in the infrared. In general, the spectral signatures of target and background objects vary strongly as a function of wavelength throughout the observable spectrum with unique material-dependent characteristics, so a more detailed measurement of the image at several different wavelengths can provide even more useful target-background discriminants to enhance ATR performance.
Such multiband sensors have been implemented with encouraging results. For example, dual-band systems with simultaneous robust missile plume detection and excellent sun-glint rejection properties have been demonstrated. Real time, pixel-aligned dual-band, simultaneous mid- and long-wave FPAs have been developed by a number of organizations. Similar pixel-aligned, dual-polarization FPAs have also been fabricated for the exploitation of the differences between manmade and natural objects in polarization-sensitive reflection and emission. Existing space-based ground-imaging systems (e.g., the land remote-sensing satellite (LANDSAT) family) frequently collect data on as many as 5 to 20 spectral bands for discrimination purposes.
Efforts to further improve optical detection and classification of difficult targets such as land mines or nonoperating camouflaged vehicles (e.g., parked mobile missile launchers, and so on) have led to development of so-called “hyperspectral” imagers. These ambitious systems collect simultaneous data
from a very large number—even hundreds—of narrow spectral bands covering much of the available optical spectrum with the hope of finding unique, distinguishable signatures that can be exploited. In a sense, hyperspectral imaging is overkill in that it is difficult to believe that hundreds of measurements are needed for every pixel in order to identify interesting objects in the scene. Much of the interest in hyperspectral lies in the “hope” that subtle characteristic spectral differences will be found when such data are collected for challenging scenarios. Perhaps, in the end, only a handful of strategically placed bands (i.e., multiband; more than one—fewer than hundreds) will prove necessary for effective detection and classification of difficult targets. Another practical reason for ultimately reducing from a hyperspectral to a multiband approach lies in the volume of simultaneous data collected. Even though the progress of computational resources will eventually accommodate hyperspectral imaging, today the data from such sensors cannot be processed in real time.
B.2.1.9 Environmental Limitations
As indicated in the discussion above, environmental factors seriously limit the usability of electro-optical sensors. Simple visible TV-like sensors are useless at night, although electronically amplified low-light sensors can be useful at night down to starlight levels of illumination—if the night is clear. Although the atmosphere is quite transparent (i.e., low absorption loss) in the visible, some portions of the infrared spectrum are strongly absorbed by the gases in the atmosphere. As a consequence, IR sensors are generally designed to avoid these regions and operate only in traditional low-absorption, atmospheric “windows”—e.g., the near IR from the visible to about 2.5 µm, the mid IR from 3 to 5 µm, and the long-wave IR from 8 to 14 µm or even to about 20 µm.
All optical wavelengths have difficulty with weather, as rain, clouds, and fog all absorb and strongly scatter the light. Due to the λ−4 variation of Rayleigh scattering, visible light is scattered orders of magnitude more strongly than the infrared, giving IR much better penetration through dust, fog, and other scattering media, but even IR can be limited in range under these conditions. Optical sensors are definitely not “all-weather” performers. But when they work, they produce beautiful, high-resolution images. As a result they are highly valued on the battlefield—but almost always complemented by a microwave system that is “all-weather.”
B.2.1.10 Susceptibility to Countermeasures
Electro-optical sensors are quite susceptible to a variety of countermeasures. Camouflage can be very effective, as recent experience in Kosovo has demonstrated. It is often easy, by simple techniques, to make something “look” like something else—a target can be made to appear to be a portion of the background
or an artifact to be a genuine target. Since optical sensors observe only the exterior aspects of objects, appearances are everything.
Jamming, in the form of a bright flare or a directed laser beam in the FOV of the sensor, can be a serious threat because optical sensors are frequently operated “wide open” in an effort to optimize sensitivity by maximizing the number of photons collected. The collected optical flux from a directed laser beam (e.g., from a tactical high-energy laser weapon, such as that currently under development jointly with Israel), operating within the IFOV of an imaging sensor, will be focused by the sensor’s collection optics more or less onto a single detector in the focal plane. Under these circumstances, even modest high-energy laser power levels can physically destroy detector elements. Moreover, both the flare and the laser weapon beam, even if actual destruction does not result, can, by diffraction, cause large numbers of the detector elements around its image in the focal plane to saturate, thereby temporarily blinding large portions of the IFOV.
B.2.2 Technology Trends and Future Growth in Electro-optics
B.2.2.1 Uncooled IR Focal Plane Arrays
One of the most exciting advances in electro-optics in recent years has been the migration of microelectromechanical systems (MEMS) technology into IR focal planes. Arrays of tiny thermally sensitive structures (bolometers, as it were) can be fabricated on a silicon wafer using slightly modified integrated circuit manufacturing techniques, and along with each, an integrated on-wafer electrical measurement circuit to determine the instantaneous temperature of the microbolometric element. When an IR image is projected onto this wafer array by an optical system, the element-by-element temperature pattern that results from the local heating caused by the light is read out of the wafer as electrical signals and the device acts as an IR FPA, but with one enormous advantage over a traditional semiconductor FPA—it does not need to be cooled. Such MEMS-based FPAs operate at room temperature, with almost the same sensitivities (i.e., minimum detectable temperature differences measured in tens of millikelvins) as the liquid nitrogen-cooled semiconductors FPAs. Figure B.2 shows an inexpensive, compact, uncooled IR camera with a closeup of its MEMS focal plane and an image demonstrating a temperature sensitivity of 27 mK, comparable to the performance of a cooled IR FPA.
Add to the temperature advantage the facts that, as a close relative of a silicon integrated circuit, these uncooled FPAs are inexpensive to manufacture, are physically compact, and require very little power. For these very good reasons, uncooled IR cameras are going to find wide usage on the battlefield—as surveillance and terminal guidance sensors. In particular, they are perfect for all classes of unmanned air vehicles, including mini- or micro-, one-use, throw-away UAVs.
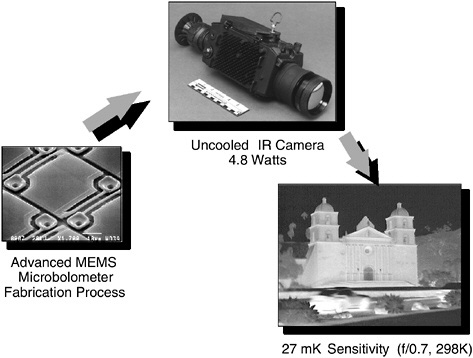
FIGURE B.2 Microelectromechanical systems-based uncooled infrared camera and temperature-sensitive image.
Their one apparent disadvantage is that the time response of an uncooled FPA is limited by thermal inertia to update rates of 30 Hz or below, whereas traditional semiconductor FPAs can operate at update rates as high as 400 Hz. For surveillance, this slow update rate is not a problem, but for terminal guidance, because of the high closing velocities and possibly rapid scene dynamics, this slow rate could be restrictive.
B.2.2.2 Advanced Focal Plane Arrays
Traditional FPAs continue to grow larger with 512 × 512 pixel HgCdTe arrays already deployed and 106 pixel arrays in sight. In addition to having more pixels, the FPAs are getting “smarter” with increasing amounts of on-chip sampled analog preprocessing being added.
B.2.2.3 Special-Purpose Focal Plane Arrays
Over the past decade, a number of interesting special-purpose multispectral FPAs have been developed. Both hybrid and monolithic techniques have been
used to create stacked, dual-band, focal planes that produce simultaneous images in two different portions of the spectrum, say a 3 to 5 mm band and an 8 to 14 mm band, and both are perfectly pixel-aligned. This provides an ideal input to a sophisticated multifrequency ATR algorithm for target detection and classification.
Recently this pixel-aligned concept has been successfully applied to image polarization. That is, the FPA generates simultaneous, pixel-aligned images of the scene in each of two orthogonal polarizations. In all other respects, it acts like any other traditional FPA with respect to sensitivity, update rate, and so on. Since manmade objects tend to retain polarization and natural background objects generally depolarize, this special sensor offers interesting potential for target discrimination. All these possibilities are currently being explored.
B.2.2.4 Ladar Three-dimensional Imaging
The ability of laser imaging systems to obtain high-resolution, range-to-target measurements offers enormous advantages for target recognition. The sensor directly measures the geometric features of the object of interest and is not confused by scene illumination effects and the unknown distances, which trouble classical passive IR or visible-image ATR algorithms. The height of the tank or truck, or its precise orientation toward the sensor, can be directly measured without guesswork.
These advantages have been understood for decades; however, the lasers available have generally been bulky and expensive and no such system has yet been deployed, although the expected performance advantages have been demonstrated in the field with brassboard prototypes. Recently, a new generation of compact diode-pumped solid-state laser sources (e.g., Lincoln Laboratory’s “microchip” YAG lasers) has evolved and interest in this promising technology has reawakened. It seems to offer unique potential for terminal guidance with automatic target selection and aimpoint determination based on geometric information about the target. Given the potential sensitivity of long-range, land attack, precision weapons to GPS jamming, such capable terminal sensors ought to be of great interest.
B.2.2.5 Hyperspectral Imaging
Multispectral imaging, with only two or three selected bands, has proven effective in enhancing the ability to detect and classify some targets. However, external appearances can often easily be altered and controlled by simple techniques (e.g., camouflage). It seems obvious that if detailed spectral information could be collected about every scene pixel, it might be possible to detect the difference between target and background pixels, particularly if it were known just which portions of the spectrum contained these crucial differences. For
example, the green dyes used in the World Wars to camouflage soldiers hidden among the trees, while matching the green of the trees, had a completely different spectral response in the red—the red of autumn leaves is always present, just masked by the overwhelming chlorophyll green most of the year—and were easily detected by looking through a red filter.
Following this train of thought, so-called hyperspectral imaging sensors have been built with information collected at each image pixel, over tens to hundreds of individual spectral bands—some only a few nanometers wide. The inevitable result is a classic case of data overload with no chance at all for real-time response—at least, that is, until computer technology catches up. Given the pluses and minuses, it is not clear how valuable hyperspectral imaging will prove in the battlefield. Application to high-dynamic sensor/shooter/weapons scenarios seem unlikely, but longer-latency situational awareness might be considerably enhanced if the needed algorithms can be developed.
B.2.2.6 Optical Phased Arrays
Considering the performance advantages phased-array electronic beam steering has given to radar such that it completely dominates modern high-performance radar today, it is not surprising that considerable effort has been expended seeking ways to extend electronic beam agility to electro-optics. Given the minuscule dimensions of the wavelengths of light and the requirement to separate adjacent phase shifters by half-wavelength intervals in order to avoid grating lobes, it is easy to see that the challenge is formidable. Clearly an optical beam steering array cannot be implemented by assembling discrete elements as with a brick architecture radar phased array. Monolithic techniques, resembling those of the tile architectures, are called for.
Based on liquid crystal phase-shifting materials, which are optically transparent with electric field variable indices of refraction, combined with photolithographically deposited transparent electrode patterns, optical phased arrays have been developed and demonstrated in the past few years. Limited by current technology to small deflection angles of only a few degrees and to switching rates below 1 kHz, optical phased array technology is nevertheless impressive and promising. DARPA is now in the process of establishing a well-funded program to extend the angular capabilities of optical phased arrays to angles as large as ± 90°.
B.3 SONAR
Acoustics—the propagation of sound waves through air, water, or solid ground—provides another remote sensing capability of crucial importance to the Navy because acoustic sonar permits us to “see” long distances underwater where many threats hide, but where optical sensors work poorly and radars, not at all.
As a wave phenomenon, sonar shares with radar and EO many of the same equations determining system performance, e.g., the relationship between aperture size and wavelength to beam width and angular resolution or between signal bandwidth and measurement accuracy.
Thus, from a system point of view, sonar is a familiar relative of radar and EO and can perform all the same functions—detection, classification, and localization of underwater and sea-surface targets, with the generation of situation awareness “images” of portions of the sea.
On the other hand, the medium that sonar systems have to deal with is absolutely terrible. Underwater sound propagation is almost never in a straight line because of strong medium nonuniformities associated with time and spatial variations in temperature and salinity. Reflections from the sea surface and bottom are common. And the sea is never free of acoustic noise of all kinds—from waves, from manmade objects like ships, and from biological sources like whales, porpoises, and fish.
The velocity of sound in water is very low—roughly 1 mile/s—which seriously increases the time needed to collect information for active sonar detection, classification, and localization of distant targets. Finally, the absorption of sound in water is a strong, increasing function of the acoustic frequency—low frequencies (e.g., ≤ 3 kHz) are needed for long range but cannot achieve high angular resolution because of the very large antenna sizes required and the unpredictable spatial variations in sound propagation. And although high angular resolution is possible at high frequencies (e.g., 35 to 350 kHz), it can be achieved only at fairly short ranges of several hundred meters or less. The result of these media-induced obstacles is that sonar performance in general is very slow, with image resolution and target location capabilities that degrade rapidly with range.
Because of their importance, and in spite of their many limitations as sensors, naval sonars are nevertheless ubiquitous throughout the battle group, since the underwater threats are many and real. Every ship or submarine has several—hull mounted or towed; active or passive; high frequency, medium frequency, or low frequency; and so on. And the battlespace usually contains a number of unmanned sonars—some permanently moored, e.g., strategic arrays; others temporarily drifting, e.g., sonobuoys; and others self-propelled, e.g., unmanned underwater vehicles (UUVs) or remotely operated vehicles (ROVs).
It is thus natural to consider increasing the fleet’s antisubmarine warfare (ASW) capabilities by shifting from a platform-centric to a network-centric point of view. With the right communications, a widely dispersed set of sonar sensors can be made to emulate CEC and act as a single sonar system that, like the CEC radar, would be thought of as organic to a fleet of ships rather than to any individual platform. Since sonar, in contrast to radar, makes extensive use of passive detection, it is also natural to expect a mixture of passive and active modes throughout the network producing an even larger synergistic effect than would be obtained by operating all the sensors in the same mode. Clearly CEC
|
Box B.3 Hot Topics in Sonar
|
should consider extending its operation to a mix of active and passive (i.e., bistatic) operations because of the antistealth and counter-countermeasure (CCM) advantages.
Current thrusts in sonar technology are described in Box B.3.
B.3.1 Sonar Performance
B.3.1.1 Resolution
Direct measurements of range can only be obtained from an active sonar, and the resolution is determined fundamentally, as is the case for active RF systems, by the time-bandwidth product of the transmitted signal and the signal-to-noise ratio. Because of the low operating frequencies characteristic of acoustics, time-bandwidth products (and hence pulse compression ratios) of sonar signals are typically on the order of 100 or so, whereas for radar, products of thousands to tens of thousands are common.
Although a wide range of range resolution performance is available by varying the amounts of pulse compression applied, active sonar resolution typically is controlled to match the size of the target sought in order to maximize the signal-to-noise ratio and hence the detectability of the return pulse. Too high a resolution causes the sonar to “see” only pieces of the target at a time and reduces the return signal maximum amplitude.
Angular resolution achievable by a sonar is determined largely by the diffraction properties of the antenna and again the signal-to-noise ratio. But the beam width alone is not the limit as fractional beam width accuracy is certainly possible through interferometric techniques or what is called in radar “monopulse.” Because of the relatively large wavelengths associated with acoustic radiation, the phased arrays used for sonar typically do not have more than a few tens of elements (e.g., 10 to 40) along any direction, whatever the frequency range employed. Hull-mounted sonar, for example, such as the BQQ-5 submarine sonar, has a 15 ft diameter spherical array, whereas the SQS-53 sonar for large surface ships has a 16 ft cylindrical array and the SQS-56 surface ship
sonar, only a 4 ft diameter. At a frequency of 3.5 kHz, these dimensions lead to beam widths of 3° to 10°.
For high-frequency (500 kHz) imaging sonar, the antenna dimension need be only 64 cm long to obtain a 3° beam width, whereas a long-range search system emitting at 1 kHz would have to be 500 times longer (e.g., 320 m) to have the same beam width.
B.3.1.2 Field of View and Field of Regard
As phased arrays, all sonar antennas can be readily steered over large fields of regard. Linear arrays, hull mounted or towed, can achieve ± 60° or more, whereas some hull-mounted arrays are circular and can be steered through a full 360°. Long-range sonar exploits this capability by creating a few tens of beam positions at different angles so that the full FOR can be monitored simultaneously, each individual beam being a few degrees (e.g., 3° to 30°) in width, depending on the size of the array and the operating frequency. Side-scan imaging sonar generally is restricted to producing a narrow horizontal beam (e.g., 1° to as small as 1/5°) with a much broader beam in the vertical (e.g., 40°) and thus has a very small IFOV that is scanned forward by the motion of the platform. The IFOV for surveying can be as large as 15 knots or for classification (of mines, for example), as slow as 1 to 5 knots. Projected on the bottom, the IFOV of a side-scan sonar may be no larger than 30 m2, e.g., a strip 1/5 m by 150 m.
B.3.1.3 Range
The effective range of a sonar is a strong function of the frequency used due to the quadratic increase in water absorption of sound with increasing frequency. Sonar utilizing low frequencies of 3 kHz or less can often detect targets up to 100,000 yd (~50 nautical miles) or more. But because of the unpredictable properties of ocean propagation, with possibilities for refraction down until a reflection off the sea bottom occurs (i.e., bottom bounce) or refraction down followed by refraction back up to the surface (i.e., convergence), it is very difficult to determine exactly how far away the acoustic source or reflection is. In the so-called convergence zones, detection can be excellent, even though the ranges are large. However, these zones can be quite narrow (~1 percent of the range); and between the zones, which can repeat at intervals of 40,000 to 80,000 yd, depending on which of the world’s oceans the sonar is operating in, nothing much can be detected. The bending effects of the ocean gradients result in “blind” regions between convergence zones, within which targets cannot be detected by the sonar—that is, volumes of water that cannot be reached by acoustic beams radiated by the sonar because they are refracted away from and around these regions.
Passive sonar, of course, cannot directly determine range at all—only azi-
muth or bearing to the target can be estimated. Because of the slow dynamics of vehicle motion in the ocean, it is a common practice for the sonar, after receiving a contact on a certain bearing, to have the ship turn and take a run to a different location and then use the bearing estimate from the new location to triangulate with the earlier bearing to obtain a rough location of the acoustic source. Several cooperative passive sonars, viewing the same target simultaneously from sufficiently separated physical locations in a network-centric sensor grid, could, of course, provide instantaneous, more accurate localization.
B.3.1.4 Imaging for Mine Location
Side-scan sonar operating at high frequencies (e.g., 100 to 500 kHz) can produce good images of mines for detection and classification, with resolutions on the bottom 10 to 30 cm. However, because of absorption, such performance is limited to ranges from the platform of only 100 to 200 m—a distance that can lie within the lethal range of the mines. Often a compromise is chosen, searching first at a medium frequency (e.g., 35 to 100 kHz) which allows a reasonable standoff distance and good detection possibilities, followed by a slow-speed, closer-range, high-frequency imaging pass for classification or even the use of an ROV or swimmer. Anyway it is done, it takes an enormous amount of time. Exploitation of the two-dimensional acoustic shadows of the mines have been used successfully to produce effective ATR algorithms for mine classification.
B.3.1.5 Geopositioning Accuracy
Except at mine-detecting ranges (i.e., within a few hundred meters of the platform), the ability of sonar to determine a target’s position in range and azimuth is extremely poor. With degrees of beam width, unknown paths of propagation, and great range uncertainty, sonar is of little use for geolocation. Unfortunately, for underwater targets, sometimes that is all that can be done.
B.3.1.6 Area Coverage Rate
Active sonar for medium or long range is limited by the long round-trip return time of the transmitted energy—for a range of 20 nautical miles, the round-trip time is about 23 sec. If the sonar explores the 20 nautical miles radius ± 60° FOR permitted by the phased array by 30 different 4° beams, the area coverage rate is only about 2 km2/s. This should be compared with an above-the-surface surveillance radar that can cover a 200 nautical miles range by 120° segment in only 4 s for an area coverage rate of 36,000 km2/s.
On the imaging side, route surveying for mines with a side-scan sonar in the push-broom mode with 2000 m wide swath and moving at 15 knots has an area
coverage rate of only 1/65 km2/s. And a mine-classification high-frequency sonar, covering a swath of 150 m at a speed of 5 knots, has an even smaller area coverage rate of only about 400 m2/s, which is a minuscule 1/2500 km2/s or only 1.44 km2/h.
Finding something in or on the bottom of the ocean can take a very long time, and because of physics, our accelerating technology has not yet been able to overcome the obstacles.
B.3.1.7 Communication Data Rate Requirements
In spite of the large amounts of computational resources and time that have to be expended in order to extract meaningful information from active or passive sonar signals, the resulting data are so sparse (i.e., not many target-like objects within range at any given time) and are collected so slowly and with such low resolution that the resulting data rates to transfer one sensor’s data to another location put no strain at all on an RF communication link. For example, a medium- or long-range surveillance system might need to transfer a video screen-worth of data (say, 400,000 pixels at 8 bits) every 5 or 10 s, resulting in a data rate no larger than 650 kbps. Even a high-resolution mine-hunting side-scan sonar, producing a 20 cm pixel over a 150 m swath on the bottom and moving forward at 5 knots (i.e., ~2.6 m/s) results in only about 10,000 pixels/s (say, 10 bits each) for a total rate of only 100 kbps.
On the other hand, if we wished to employ an acoustic communication link, say, between cooperating UUV platforms, the necessary data rates could stress the system, and further local processing with ATR-like algorithms and perhaps the application of data compression techniques would be called for.
B.3.1.8 Environmental Issues
The effects of the low acoustic propagation velocity, the media variability and inhomogeneity, and the frequency-dependent absorption that seriously limit sonar performance in the open ocean have been discussed. Operation in the littoral, because of the shallow depths and coastal waves, greatly aggravates an already difficult sensor problem because of the more frequent reflections from the top and bottom surfaces of the water, the absorption in and irregularity of the bottom, and the high levels of wave and surface noise characteristic of this environment. Sonar designed for the open ocean does not work well, if at all, in the littorals. New designs that properly account for the physical characteristics of the littoral need to be developed, although it is far from clear that major breakthroughs in single-sensor performance are possible. More likely the problem requires a distributed solution with large numbers of short-range sensors acting cooperatively in a network-centric mode.
B.3.2 Technology Trends and Future Growth in Sonar
B.3.2.1 Synthetic Aperture Sonar
The technology of conventional side-scan sonar for the imaging of mines has saturated, as it were, in that the range capabilities and the area coverage rate of several nautical square miles per hour are strongly limited by the acoustic velocity and attenuation properties of sea water—not by technology per se. The 10 to 20 cm resolution obtainable from practical antennas is considered more or less adequate for mine detection and classification. It is in this context that interest in synthetic aperture sonar (SAS) has been reawakened in the past several years, with the hope that the imaging resolution and range (and hence area coverage rate) might be increased through the use of low-frequency acoustic signals and very large virtual antennas, without giving up the 10 to 20 cm resolution.
Based on the very same principles as microwave SAR, the possibility for SAS was suggested early, 30 to 40 years ago. Nevertheless, very little real progress has been achieved in the intervening decades, for the same physical obstacles (e.g., media inhomogeneity, extreme temporal variability, and the slow 1 mile/sec acoustic propagation velocity) that afflict all sonar applications present even larger challenges for the coherently processed SAS. For example, the precise position of the sonar transmit-and-receive components must be known over the whole length of the virtual antenna, to fractions of the acoustic wavelength—e.g., to millimeters if a relatively low mine-hunting frequency of 100 kHz is used where λ = 1.6 cm. Because of the difficulties in achieving this positional knowledge, autofocus algorithms have been evoked which work to some extent but are so computationally expensive that they cannot yet be carried out in real time. Nor is it clear, because of media temporal fluctuations, that signal coherence can be maintained over the time it takes to traverse the full virtual antenna.
Nevertheless, interest in SAS is high at the moment, but it is fair to say that it is still “in its infancy” today. Because of the difficulties in the physics, not very much has yet been demonstrated except under closely controlled conditions.
B.3.2.2 Cooperating Unmanned Underwater Vehicles
In the spirit of network-centric operations, concepts are being actively explored for mine hunting involving multiple UUVs working in parallel. Equipped with very-high-frequency, 1 MHz or higher, side-scan imaging sensors and, perhaps in the future, high-resolution laser optical imaging systems, with ranges of only a few tens of meters at best, these mobile underwater sensors are perfect candidates for cooperative networking. Although these sensors operate independently at the moment, future cooperation through surface RF or underwater acoustic communication links, leading to a distributed and adaptive metasensor concept, should produce the synergistic multiplication of capabilities and effectiveness expected from networked concepts.
B.3.2.3 Autonomous Distributed Systems
Distributed arrays of acoustic sensors with elements less capable than the mobile UUVs suggested above are also of great interest for littoral or shallow water (100 to 500 m) area surveillance. Deployed like sonobuoys and drifting or moored in place, each node is envisioned to possess considerable on-board signal and data-processing resources and to be capable of passive automatic detection and classification as well as active signal processing. These individual capabilities, complemented by the networked acoustic/RF communications, would permit them to operate as a single large and very capable coherent distributed sonar. A typical multistatic configuration might consist of a few active sources and as many as 10 to 100 “smart” sonobuoy-like nodes distributed broadly over the area under surveillance.
In addition to the loosely coupled multistatic systems of active sources and smart sonobuoys, various physically connected drifting or moored arrays are under consideration. The autonomous drifting line array would consist of a very-low-frequency passive array of up to 100 hydrophone elements, drifting freely in the ocean currents. Data from the linear, but almost certainly not straight, aperture would be processed on board the array through battery-powered computer resources and would report detection/classification information back to the decision makers via an RF link as necessary.
Other concepts envision similar autonomous arrays moored in shallower water. Key to the success of all these concepts is the availability of significant local on-board sensor processing supported by long-life batteries.
B.3.2.4 Ultra-Wideband Sonar
In spite of our technology, animal sonar, as utilized by bats and porpoises, far exceeds our capabilities for precise location and target classification. Operating in complicated environments, in the presence of perhaps dozens of competing individuals, these animals emit complex, very broadband sonar pulses that they change rapidly as they move from detection to classification and final capture of prey, apparently adapting their internal signal-matched filter on a pulse-to-pulse basis, easily sorting out their own signals from those of other bats or porpoises.
Since the early 1990s, building on pioneering university studies of bat sonar, the Navy has sponsored efforts to develop a biologically inspired, ultra-wideband sonar, using multioctave signals and multichannel nonlinear processing with coherent recombination. Computer studies applying such processing to existing narrowband field data have already demonstrated an encouraging reduction in false alarms. The development of transducers capable of emitting the desired ultra-wideband signal is under way, and it is hoped that soon we will be able to duplicate in the littorals at least some of the extraordinary capabilities common in nature.
































