
2
Assessment of the ONR 351 UAV/UCAV Program
INTRODUCTION
Initiated by ONR 351 in FY99, UAV/UCAV 6.2 activities to date have been devoted entirely to a systematic, top-down S&T planning process (see Figure 2.1) intended to lead logically to a series of roadmaps for future investments in UAV/UCAV-critical technologies. An outstanding team of contractors with recognized experience in UAV-relevant disciplines was assembled, with NRL contributing additional sensor and dynamic networking expertise.
The process began with ONR and the team envisioning the role of UAVs in the battlespace as “. . . transparent extension[s] of manned combat vehicles [based on multiple] intelligent autonomous air vehicles [operating as a] cooperative and network-centric intelligent system of systems.” It was assumed that while a “human dictates the mission at high levels, [software] agents . . . take care of [the] details.”1 This vision is extremely ambitious and proved quite controversial with respect to both the validity of its assumptions and the extent to which it could be said to represent the Department of the Navy 's UAV vision of the future.
This initial abstract vision was then transformed, through a series of increasingly detailed studies of missions and vehicle concepts and technology, into a more concrete UAV/UCAV vision that is very far reaching in both its technology and its operational concepts.
First a subset of possible missions for the UAV/UCAV vision was selected and analyzed in some detail by ONR, assisted by two air vehicle prime contractors (Lockheed Martin and Bell). Seven categories of missions that challenged the technical performance of the UAV/UCAVs were addressed:
-
Surveillance and reconnaissance,
-
Lethal air-to-air combat,
-
Lethal air-to-ground combat for the suppression of enemy air defenses,
-
Close air support,
-
Logistics and resupply,
-
Search and rescue, and
-
Mine countermeasures.
|
1 |
Allen Moshfegh, Office of Naval Research, “Basic Research Programs on Intelligent Autonomous Agents,” briefing presented to the committee, December 13, 1999. |
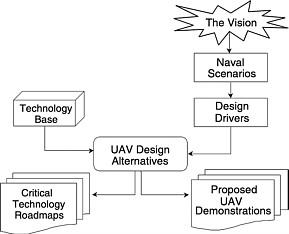
FIGURE 2.1 The ONR 351 UAV/UCAV planning process.
Other missions could (and perhaps should) have been considered, particularly if the vision was intended to be all-encompassing.
From the operational/systems analysis of these missions, performance requirements were established and passed on to all the team members for the identification of critical design drivers. Combining the missions and the design drivers with a knowledge of the existing and expected future technology base, the mission space was divided into three tiers, by mission and by altitude (i.e., high, medium, and low), and a series of conceptual UAV/ UCAV design alternatives were created—some fixed-wing and some rotary.
From the design alternatives, the critical technologies needed to implement the vision as it relates to the seven missions were identified and grouped into four technical areas:
-
Vehicle technology,
-
Secure communications and dynamic networking,
-
Sensors and sensor systems, and
-
Autonomy.
The maturity of the existing and projected technology capabilities for each of these was assessed by the contractor and NRL experts. An attempt was made to identify the technological deficiencies that needed additional UAV-specific investments for the UAV/UCAV vision to be realizable in the future and to convert this information into roadmaps that provide descriptions and timetables for future S& T investments aimed at acquiring the missing critical capabilities. Owing to constraints on time and funding, these roadmaps were still rather sketchy at the time of the review.
Finally, an ONR-sponsored workshop2 developed a sequence of eight candidate applied research and technology UAV/UCAV demonstrations that addressed critical issues in the following areas:
-
Mission planning and execution,
-
A robust and reconfigurable dynamic network of networks, and
-
Autonomous high-speed, high-precision navigation and control.
No time frame for these demonstrations was given.
The rest of Chapter 2 addresses the committee's impressions, conclusions, and recommendations for the ONR 351 UAV/UCAV program in terms of (1) its vision, (2) the four critical technologies, and (3) the proposed UAV/ UCAV demonstrations.
THE ONR VISION
As has been indicated, the Office of Naval Research (specifically, ONR 351) is planning to launch an S&T effort to achieve a UAV/UCAV system that will meet Navy and Marine Corps operational needs in 2020. This system (or network, as it is sometimes referred to) is to comprise high-, medium-, and low-altitude UAVs/UCAVs, both lethal and nonlethal, functioning cooperatively and operating from both ships and shore bases. Although not well conveyed by ONR 351's use of the term “UCAV,” the ONR vision in fact embraces the totality of naval UAVs, of which the fighter-like UCAV is but one category.
ONR sees its UAVs/UCAVs as intelligent autonomous vehicles capable of over-the-horizon detection, identification, tracking, and engagement of intelligent adversaries. These vehicles will cooperate and interact to provide a network in the sky to enable a real-time tactical picture and local positioning system for precision target localization and strike and will perhaps even carry out the strikes in some circumstances. 3
For autonomy, the long-term vision foresees human guidance as coming only from the highest command level, with intelligent agents taking care of all details—such as takeoff, flying, and landing of the UAV/UCAV, reacting to unexpected events, deciding when a mission is complete, returning to base, and so on—without a continuous significant human-in-the-loop component.
To identify technologies crucial to realizing its UAV/UCAV vision, ONR convoked an S&T roadmap development team made up principally of contractors to flesh out the initial vision. Scenarios for 2020 were developed in which the UCAV system was required to perform missions. The chosen scenarios were all of the high-end nature characteristic of a major theater war, in which U.S. forces faced daunting challenges such as a lack of forward bases, advanced technology systems in the hands of enemy forces, and complete denial-of-satellite-communications capability.
The 12 potential naval UAV/UCAV missions studied included battle management/command, control, communications, computing, intelligence, surveillance, and reconnaissance (BM/C4ISR); electronic combat; suppression of enemy air defense (SEAD); strike; battle damage assessment (BDA); close air support; mine countermeasures (MCM); search rescue; resupply; escort; reconnaissance (RECCE); and combat air patrol (CAP).
The missions sorted naturally into three tiers characterized by the altitude at which the UAV/UCAVs would operate, which led to a partitioning of candidate UAV vehicles into four distinct classes:
-
High-altitude tier (~70,000 ft) (UCAV-H)—fixed-wing, long-endurance
-
Communication relay and
-
Mobile positioning system for local geopositioning without the Global Positioning System (GPS).
2
Held at the Naval Research Laboratory, Washington, D.C., December 1998.
3
Allen Moshfegh, Office of Naval Research, “Basic Research Programs on Intelligent Autonomous Agents,” briefing presented to the committee, December 13, 1999.
-
-
Medium-altitude tier (~25,000 ft) (UCAV-M)—fixed-wing, moderate endurance
-
Targeting,
-
Reconnaissance,
-
Surveillance, and
-
Intelligence gathering.
-
-
Low-altitude tier (<1,000 ft) (UCAV-L)—fixed/rotary wing versions, some endurance
-
Precision weapon delivery for strike,
-
Close-in RECCE,
-
Resupply,
-
BDA,
-
Search and rescue, and
-
MCM.
-
-
The CAP mission crosses altitude tiers and so constitutes a fourth class.
This separation into tiers, which leads to different kinds of vehicles and capabilities for each category, seems reasonable. However, if other UAV missions and alternatives—such as the mini- and micro-UAVs under development by DARPA and the Army or a very high dynamics vehicle —are included, the picture might change.
The operational demands derived from a detailed examination of the chosen scenarios were passed to the airframe, vehicle management, sensor, combat, and communication and networking systems developers as conceptual design drivers.
This process of setting forth operational demands yielded highly stressing operational environments, which, when coupled with the assumption of complete intelligent autonomy, often bordered—in the opinion of some committee members—on the implausible. This, in turn, led to requirements for capabilities in intelligent autonomy and robust wireless communications and networking that were judged to be orders of magnitude greater than those available today or envisioned for the foreseeable future.
These requirements represent the critical technology challenges for the future and seem to be appropriate targets for an S&T organization such as ONR. While they may or may not be met in a timely fashion, they certainly will never be met if they are not addressed.
Conclusions and Recommendation
The ONR 351 vision for its UAV/UCAV program is aggressive and very far reaching both in technology and operational concept. For the initiative and creativity shown, the quality of the team, and the excellent effort put into fleshing out the vision through detailed mission analyses, ONR 351 is to be commended. This was definitely an “out of the box” exercise.
While no committee member believed that this vision was not aimed in the right direction, many believed that it suffered from being too ambitious with respect to autonomy. All agreed, however, that the vision was incomplete in a number of significant ways.
Is the Vision Too Ambitious?
The ONR vision pictured swarms of cooperating and totally autonomous UAVs that distribute and share information and assignments and that self-adjust for operational changes, losses, sensor blinding, electronic jamming, and software crashes, all the while still accomplishing their assigned mission without human intervention or active involvement. None of this is remotely possible today. It will take many years of commitment and substantial funding to achieve this vision since there are a number of difficult and fundamental technology problems to be solved. As one example among many, the software systems necessary for autonomous, adaptive, and reliable UAV operations are well beyond the current state of the art, and new methodologies for developing and testing large software systems are clearly essential. These are, indeed, among the real challenges for UAV/ UCAV technology of the future and are appropriate targets for S&T investments today.
But, as a practical matter, ONR does itself a disservice by projecting its UAV/UCAV vision, in one leap, directly into the far future, postulating machines with complete, trustable, intelligent autonomy and omitting all discussion of the inevitable nearer-term issues, objectives, and potential of partially autonomous systems having significant human participation. Given that we do not yet know how to implement autonomy we can truly trust, the idea of the battlespace of tomorrow filled with swarms of potentially lethal UAVs zipping around on their own and changing their mind, as it were, on the fly is a scary thought and one guaranteed to put off most warfighters of today.
More important, perhaps, is the fact that those who allocate funding throughout the DOD rarely, if ever, look 20 or more years into the future. They need results today and tomorrow—not decades from now. Presented with a vision for the far future, however rational and probable, most such decision makers will view it as unrealistic or impractical and quickly dismiss it. Funding can be elusive when such views prevail.
To avoid, or minimize, these reactions, ONR need not change its long-term vision—although it may want to do so for other reasons—but it does need to complement its current UAV/UCAV vision by describing a reasonable evolutionary process that could take us from here to there, complete with near-term goals that can be considered realistic and practical.
Involving Other Stakeholders and Completing the Vision
ONR's UAV/UCAV effort can hardly thrive in isolation. To be successful it must be linked in a meaningful way to UAV activities elsewhere in the Department of the Navy, particularly to the impending DARPA/Navy UCAV-N ATDs and the FNCs, which are going to get the lion's share of the money. The committee noted that ONR's beginning vision of a UAV/UCAV system and the requirements-generating scenarios appear to have been developed without consultating uniformed planners in the Navy and Marine Corps or other members of the operational community. For this reason, the proposed plan lacks linkage to naval as well as joint near- and mid-term thinking in operational concepts and thus fails to adequately address questions such as the following:
-
How will cooperating UAV swarms contribute to theater strategic objectives in the year 2020?
-
Why will naval forces need them?
-
How will the UAV swarms in a theater interact with other weapon systems?
-
How will operational commanders at various levels interact with the swarms?
-
How will the advent of UAVs change the requirements levied on the other systems in order to maximize overall force effectiveness and affordability?
A more focused and tractable effort should at least involve Navy and Marine Corps users in jointly defining both a long-term Department of the Navy vision and potential system concepts. In addition, other Department of the Navy organizations need to be involved. N85, for example, describes itself as the “lead spokesman for Navy UAV requirements ” and a “resource sponsor for naval UAVs” while simultaneously chairing the Naval UAV ESG.4 Clearly, N85 should be a participant in the generation and approval of such a long-range UAV/UCAV vision, but neither it nor any of the acquisition organizations were part of the ONR process. The ONR 351 UAV/ UCAV vision is therefore to be considered incomplete insofar as no other Department of the Navy stakeholders were involved in its creation and validation.
Another deficiency relates to the weakness that comes from presenting only the ultimate, totally autonomous far future version of the vision. The way to remedy this weakness would be to add a further level of detail to the vision—another sense in which the vision needs completing.
|
4 |
Col Terry Robling, USMC, Expeditionary Warfare Division, N85, “Department of the Navy Unmanned Aerial Vehicle (UAV) Program: Industrial Day,” briefing distributed to the committee by CDR Osa E. Fitch, USN, Naval Air Systems Command, January 18, 2000. |
Since the Navy and Marine Corps, and indeed all the military services, are only just beginning to incorporate UAVs into their operational thinking, the reality is that these Services will tend to proceed cautiously with autonomy in general and with the lethal UCAV concept in particular. At first, these vehicles are likely to be teleoperated, with humans in the control loop. For example, Marines on the ground will initially demand that UAVs/UCAVs performing close air support be under direct human control. After confidence has been developed that UAVs/UCAVs can be launched from ships and safely landed on them and operated reliably, the teleoperation mode might progress to the point where humans issue high-level commands that the UAV/UCAV can analyze and execute autonomously. It is only with such a gradual approach that naval commanders will gain enough confidence to permit UAVs/UCAVs to undertake totally autonomous operations. How long this process will take will be a function of the experience gained with current UAVs such as Predator and Global Hawk, the forthcoming PEO (CU) VTUAV system, and the DARPA/USAF/Department of the Navy UCAV ATD.
Therefore, what is also needed for the ONR 351 UAV/UCAV vision is a sequence and timetable for lesser, nearer-term visions that reflects a gradual transition of autonomy from man to machine through appropriate intermediate stages of teleoperation and partial autonomy. Obviously there should be coordination with and a buy-in by Department of the Navy users and acquisition offices on the evolution of UAV autonomy as well as on all other aspects of the vision.
Finally, the vision was judged incomplete in that it did not consider all possible UAV/UCAV missions but confined itself to scenarios requiring relatively high-performance, high-cost UAV/UCAV vehicles. Where, for example, are the inexpensive (and expendable) mini- or micro-UAVs, which should be of interest to the Marines for local information gathering? What about smarter cruise missiles? What other missions could be envisioned if the high dynamic potential of unmanned vehicles can be realized? And so on.
Recommendation
The ONR 351 UAV/UCAV vision appears to have great merit and could be applied beyond the Department of the Navy. At some point in the future, it could serve as a catalyst for an integrated Navy, Marine Corps, Air Force, Army, DARPA, and National Aeronautics and Space Administration (NASA) S&T program focused on UAV/ UCAV-enabling technologies. But it is as yet incomplete in many ways. ONR should complete its vision in collaboration with the broader community of Department of the Navy UAV stakeholders, taking into account their (perhaps) more realistic view of the future of intelligent autonomy and also considering a fuller range of potential missions.
CRITICAL TECHNOLOGIES
Of the many technologies needed to realize the UAVs/UCAVs of the future, ONR 351 selected four as being particularly relevant and critical:
-
Vehicle technology,
-
Secure communications and dynamic networking,
-
Sensors and sensor systems, and
-
Autonomy.
Vehicle Technology
Discussions of air vehicle technology were presented by two contractors: fixed-wing configurations were covered by Lockheed Martin Tactical Aircraft Systems and rotary-wing by Bell Helicopter Textron. The briefings were competently handled, as befits the teams' obvious experience and credentials in aircraft technology.
Fixed-wing Vehicles
Fixed-wing candidate vehicles for each of the three tiers were shown —a high-altitude type (UCAV-H), a mid-altitude type (UCAV-M), and a low-altitude type (UCAV-LF)—and their projected performance characteristics were listed. No indication was given of how these designs had been developed, although there was some discussion of on-ship storage issues for the medium- and low-altitude versions. The vehicles proposed looked familiar, as they all seemed to be relatives of existing manned and unmanned designs. This should not be surprising, given that design options are often limited and constrained by current technology projections and that this was a very low budget (~$150,000) exercise.
While the UCAV-H was intended to be land-based only, both the UCAV-M and the UCAV-LF included ship-compatible VTOL capabilities. As the altitude decreased, the operational ranges and time-on-station capabilities decreased—from 4,500 nautical miles and 24 hours on-station for the UCAV-H to 600 nautical miles and 0.5 hours on-station for the UCAV-LF. At the same time, the speed and maneuverability increased, from a gentle 320+ knots and 1.5 g for the UCAV-H at 70,000 ft to a vigorous 590+ knots and 11 g capability for the UCAV-HF on the deck.
Some of the committee members were interested in the potential of UCAVs to exploit violent maneuvering, i.e., in their very high instantaneous and sustained acceleration g and very high g onset rate capabilities. The ability of unmanned vehicles to generate and take advantage of unsteady aerodynamic, structural, and propulsion interactions in various flight phases could be a distinctive feature in combat lethality and survivability. Unfortunately, while such capabilities are implicit in the 11-g specification given for the hypothetical UCAV-LF, there was no explicit discussion of violent maneuvering capabilities or implementation issues, so the committee was unable to assess the merits of the team 's thinking along these lines.
Assuming these design features, critical airframe technologies were then identified and investments were recommended in advanced concepts for reduced weight, specific fuel consumption, and some VTOL propulsion issues. These seemed reasonable as far as they went, but there was no mention of any technologies directly related to violent maneuvering, e.g., unsteady aerodynamics.
Rotary-wing Vehicles
The rotary-wing discussion focused on three low-altitude vehicles (UCAV-LRs). Two of these used a pair of wing-tip-mounted propellers that rotated between horizontal to vertical to provide both helicopter and airplane flight modes; not surprisingly, they bore a strong resemblance to Bell's existing Eagle Eye experimental UAV. The third candidate appeared to be more futuristic: it had separate fixed horizontal and vertical fans but did not seem to possess significant performance advantages. Shipboard storage was discussed, and details of mechanical concepts for the propulsion systems and a variety of trade-off curves were shown. It was obvious that the team understands helicopters. On the other hand, no technology roadmaps were presented, and this was a deficiency.
Concerns and Recommendations
It is the committee's judgment that this aspect of the ONR 351 UAV/UCAV planning exercise is incomplete. The missing roadmaps should be supplied and all the technology roadmaps should elaborate specific program recommendations, so that funding decisions can be based on them.
The impact of low observable (stealth) technology on air-vehicle requirements, designs, and costs was not explicitly addressed in the presentations. Stealth must be considered, as it will be one of the important technology drivers.
The committee also recommends that the violent maneuvering capability be more explicitly considered and included in the long-term vision. The potential for its integration with dynamic automation, networks, and communications to obtain revolutionary long-term system benefits should be evaluated. Major advances in
aerodynamic and other air vehicle technologies (e.g., dynamic lift) have the potential to achieve breakthroughs in maneuvering with concurrent vertical/short takeoff and landing capabilities.
Secure Communications and Dynamic Networking
Advanced UAVs/UCAVs will need to act in concert to achieve mission goals; doing so will require a highly adaptive approach to communications. The networking environment in which a UAV/UCAV ensemble functions will be very dynamic. Opposing forces will attempt to jam communications. There may be limitations on data links for platform control and mission management. Adequate spectrum may not be available, and wideband connectivity in the UCAV network must be affordable. Individual aircraft will be extremely mobile and may well change roles during the course of the mission. The research goal should be to support the most advanced, adaptive, and dynamic form of network-centric warfare. UAV/UCAVs should be capable of pickup team missions in which each aircraft brings whatever capabilities it possesses (e.g., sensors) and makes them accessible to the ensemble as a whole, allowing a coherent picture to emerge even though an individual sensor may be noisy or may have failed.
The dynamic character of this environment requires rethinking many of the details involved in the various layers of the networking infrastructure. The ONR 351 UAV/UCAV program has begun to tackle this assignment. The committee finds the results to be encouraging and on the right track. In particular, the program recognizes that the environment will probably involve high node mobility, limited transmission opportunities, and rapidly changing link characteristics. The UAV/UCAV ensemble will need to rapidly and accurately assess the state of the network; it will also need to efficiently adapt to the actual state and to eliminate the vulnerabilities present in it.
The ONR program has identified five key technology areas on which to focus:
-
Self-organization,
-
Network control,
-
State characterization,
-
Medium access control, and
-
Link quality control.
The approaches being investigated start from the self-organization of both the topology and the grouping of the network nodes; this naturally leads to network control of route, location, and traffic management.
The program has also developed technology matrices mapping the needs onto technology areas and specifying priorities and type of funding (6.1, basic; 6.2, applied; and 6.3, advanced development) for each. Overall, the technology map looks reasonable.
Concerns and Recommendations
Obviously, with the exponential growth in the everyday use of computer and communication networking through local-area networks (LANs), wide-area networks (WANs), cell phones, teleconferencing, virtual work groups, the Internet, and the like, the commercial world is going to be supplying a good deal of the relevant technology. Superficially, the resulting capabilities would seem suited to many UAV/UCAV needs, and if the commercial world becomes interested, the DOD would in general do well to focus on how to apply commercial off-the-shelf (COTS) technology to military needs rather than attempt to develop equivalent capabilities independently.
However, total reliance on COTS would not be wise in this case. While some useful infrastructure will emerge from commercial developments, not nearly enough will be created to support the dynamic network-centric operations that are integral to ONR 351's vision. In the commercial world, people seem to be satisfied with statically assigned resources or, at most, with dynamically assigned resources that tolerate significant setup time (e.g., conference calls). And cellular roaming, which appears to be quite dynamic, actually relies heavily on a fixed infrastructure of physical towers and land lines, implementing only the last step in the connections dynamically. Participants in cooperative UAV swarms, on the other hand, have to be able to pick up whatever signals are
available at the moment and form from them as coherent a picture of the world as possible. There does not appear to be a similar driver for this capability in the commercial world. Thus it seems appropriate for ONR to be addressing the issues of secure communications and dynamic networking directly, as it is doing, while continuing to exploit commercial development whenever possible.
The committee also recommends that in this technology, since so much of the issue is generic to the DOD, not Navy-specific, ONR 351 actively seek alliances with DARPA-ITO and with the other Services.
Sensors and Sensor Systems
Sensors are an obvious part of any UAV system. Current UAVs (e.g., Pioneer, Predator, and Global Hawk) function solely as mobile sensor platforms for generating situational awareness. They have only one role: to get critical sensors into the right places in the battlespace at the right time so that data can be collected and transmitted to human decision makers on some other ground or airborne platform. As simple observers, such situational awareness sensors often have relaxed real-time requirements for information usage. The state of the art of such airborne (often imaging) sensors—e.g., synthetic aperture radar (SAR) and forward-looking infrared (FLIR)—is mature, with many already deployed on both manned and unmanned aircraft and with efforts to enhance performance ongoing throughout the DOD.
Once lethal (i.e., UCAV) missions are added, along with autonomous behavior free from real-time human interaction, additional sensor requirements appear. These requirements are not so much in the physical configuration or measurement capabilities of the individual sensors but in the real-time or near-real-time automatic extraction of useful information from the sensor data. Such data are needed for targeting the weapons and striking or for the autonomous vehicle to exploit as it reacts continuously to its environment. The vehicle's computers must also be able to interpret and optimally combine the information from different sensors on the same platform (i.e., sensor fusion) or, in the case of cooperative swarms of UAV/UCAVs, on different platforms.
The Naval Research Laboratory (NRL) supplied sensor technology expertise for the UAV/UCAV team. It was well informed on the capabilities and maturity of all the relevant sensors and was appreciative of the unique sensor requirements generated by ONR 351's aggressive UAV/UCAV vision.
NRL correctly judged that for most individual UAV/UCAV sensors, the development of physical and measurement capabilities (e.g., size, field of view, sensitivity, and resolution) is generally well in hand. It concluded that for most sensors and sensor applications, “current and future sensor technology meets UAV/UCAV performance requirements,” admitting, however, that challenges remain throughout. It should be noted that while this is very likely true for the selected high-end missions addressed so far, it might no longer be true if microvehicles or vehicles with very high dynamics or very low signature are included in ONR 351's UAV/UCAV vision. The requirement for very small size offers significant challenges to the physical configuration and performance capabilities of individual sensors, while that for very high dynamics and/or stealth puts restrictions on external sensor apertures, which may call for conformal microwave and optical phased array technology capabilities not yet developed or envisioned.
Although the physical aspects of sensor technology can probably be expected to develop fast enough to meet the identified UAV/UCAV needs without special attention from the UAV community, the additional requirements for automatic information extraction and sensor fusion may not. Thus, special investments will be needed in cooperative multiplatform sensor fusion and automatic target recognition (ATR). Both of these are difficult problems yet critical to the success of ONR's vision. For example, despite more than 25 years of substantial investment in R&D, ATR capabilities remain limited at best, working successfully only against selected, unobscured targets in the open. As yet, camouflage easily defeats most ATR algorithms. How humans so easily accomplish such tasks is still not understood. It may well take another quarter century or more before ATR begins to offer the capabilities needed for truly reliable, autonomous operation of UAVs. Just because the task is difficult, however, does not mean it should not be addressed today.
The committee agrees that cooperative multiplatform sensor fusion and ATR are probably the two most significant challenges to ONR 351 's UAV/UCAV vision in the area of sensors. Other significant sensor deficiencies noted include the need for good collision-avoidance sensors (which also may call for UAV-unique invest-
ments) and the inability of existing sensors to reliably detect minefields and chemical and biological agents at a distance.
Concerns and Recommendations
Like the roadmaps for other critical technologies, the roadmaps produced for sensors are superficial at best, with broad topics assigned to coarse 5-year intervals. The work is unfinished. To be useful, the roadmaps must contain details such as near-term program options.
Other sensor issues will certainly arise if the guiding vision is extended to include very small (e.g., mini- and microplatforms) or very-high-dynamic vehicles. These will have to be addressed at that time. The committee believes that the ONR UAV/UCAV program should focus on automatic information extraction for ATR, as well as on cooperative multiplatform sensor fusion. ONR should track and exploit the cutting-edge work in this area, such as that of the DARPA Moving and Stationary Target Acquisition and Recognition (MSTAR) program.
Another concern is that while the sensor roadmap contains an excellent review of related technologies and efforts under way in the Navy S&T community, it is purely “Navy” in character and emphasis and does not represent a joint vision of work contributed by other agencies or Services. The committee believes that focus must be expanded to acknowledge the standards, equipment, sensors, and software tools provided by the DOD's distributed common ground systems (DCGSs), DARPA, the Air Force, and the Army. By doing so, the Department of the Navy could capture the investment made by other agencies and Services, thereby lessening the investment required to achieve UAV/UCAV-level capability.
Autonomy
Autonomy was a featured subject throughout the review. It formed the centerpiece and the most controversial element of ONR 351's overall UAV/UCAV vision of the future. It was discussed competently and at some length by both airframe contractors (Lockheed and Bell) in the context of air vehicle management and avionics, and its technology issues were examined by the Draper Laboratory.
ONR 351 presented an ambitious view of intelligent autonomy in the context of its UAV/UCAV vision of the future. Explicit in the vision is the requirement that the UAV/UCAV must be able to “function without a continuous significant human-in-the-loop component,” to “perform coordinated group missions,” and to “take [real-time] advantage of opportunities and manage contingencies.”5 As there are no software systems that can perform these functions today, achieving the projected level of autonomy may be the most challenging of the four critical technologies.
After ONR 351's systematic (mission → requirements → technology) process had been discussed, the extraction of autonomy-related requirements from the many missions considered was discussed. No attempt was made to present a complete list of derived requirements. Instead, a few examples were given to illustrate the process.
Finally, the candidate technologies deemed necessary to meet the derived autonomy requirements were identified and divided into two broad categories, each encompassing a wide range of somewhat eclectic topics:
-
Situation awareness
-
Three-dimensional mapping,
-
Sensor and data fusion,
-
Natural language processing,
-
Adaptation and learning,
-
Image understanding, and
-
Human-machine cooperation.
-
|
5 |
Allen Moshfegh, Office of Naval Research, “Basic Research Programs on Intelligent Autonomous Agents,” briefing presented to the committee, December 13, 1999. |
-
Planning and decision making under uncertainty
-
Behavior-based intelligence,
-
Path planning,
-
Multientity control,
-
Self-organizing systems,
-
Planning and control architectures,
-
Metaheuristics,
-
Mathematical programming, and
-
Hierarchical decomposition.
-
ONR 351 considered each of these technologies in terms of its relevance or applicability to the long-term vision and in terms of its maturity, as measured by the class of funding needed (6.1, 6.2, or 6.3). It identified seven critical technologies for immediate attention. For situation awareness there were four: sensor and data fusion, adaptation and learning, image understanding, and human-machine cooperation. For planning and decision-making under uncertainty there were three more: multientity control, planning and control architectures, and metaheuristics. The committee agrees that all of these topics are important but recommends explicit UAV/UCAV investments be considered for only a few of them, as discussed below.
Concerns and Recommendations
Autonomous systems are emerging as a very important national interest that reaches across many current and planned combat and support systems within the Services. Unmanned combat systems have the potential to reduce the risk of losing personnel and to reduce the cost of ownership for many military missions. High levels of autonomy are desirable in unmanned combat systems because lethality and survivability can be improved with much less communications bandwidth than would be needed by preprogrammed or remotely operated unmanned systems.
Despite the very considerable potential benefits of unmanned autonomous systems, total autonomy is not necessarily an appropriate goal for a combat system. The battle commander must have sufficient command and control of his assets to accomplish the fundamental processes of synchronized movement, focus of firepower, and distribution of firepower for his forces. The benefits of high levels of autonomy for unmanned systems can be realized only if there are corresponding levels of command and control to ensure that the unmanned assets are coordinated with other battlefield forces.
Levels of Autonomy
The presentations by the ONR team spoke of intelligent autonomy but did not explicitly define it. It is useful to understand the full range of possibilities. One possible classification for levels of autonomy is presented in Table 2.1. This classification is intended to be a fairly coarse, one-dimensional mapping of what is arguably a multidimensional space.
Other classifications of autonomy are provided by Sheridan6 and by Parasuraman.7 Using the classification system in Table 2.1, most combat aviation automation exhibits level 2 autonomy. It is highly unlikely that the
|
6 |
Sheridan, Thomas B., 1982, “Supervisory Control: Theory and Experiment for Application to Human Computer Interaction in Undersea Remote Systems,” MIT Man-Machine Systems Laboratory Report, Massachusetts Institute of Technology, Cambridge, Mass.; 1984, “Supervisory Control of Remote Manipulators, Vehicle and Dynamic Processes,” Advances in Man-Machine Systems Research, W.B. Rouse (ed.), JAI Press, a subsidiary of Elsevier Science, Greenwich, Conn. (Canadian National). |
|
7 |
Parasuraman, R., 1987, “Human Computer Monitoring,” Human Factors 29:695-706; Parasuraman, R., T. Bahri, R. Molloy, and I.L. Singh, 1991, “Effects of Shifts in the Level of Automation on Operator Performance, ” Proceedings of the International Symposium on Aviation Psychology (6th Conference, Columbus, Ohio). |
TABLE 2.1 One Possible Classification Scheme for Levels of Autonomy
|
Level |
Name |
Description |
|
0 |
Human operated |
All activity within the system is the direct result of human-initiated control inputs. The system has no autonomous control of its environment, although it may have information-only responses to sensed data. |
|
1 |
Human assisted |
The system can perform activity in parallel with human input, acting to augment the ability of the human to perform the desired activity, but has no ability to act without accompanying human input. An example is automobile automatic transmission and anti-skid brakes. |
|
2 |
Human delegated |
The system can perform limited control activity on a delegated basis. This level encompasses automatic flight controls, engine controls, and other low-level automation that must be activated or deactivated by a human input and act in mutual exclusion with human operation. |
|
3 |
Human supervised |
The system can perform a wide variety of activities given top-level permissions or direction by a human. The system provides sufficient insight into its internal operations and behaviors that it can be understood by its human supervisor and appropriately redirected. The system does not have the capability to self-initiate behaviors that are not within the scope of its current directed tasks. |
|
4 |
Mixed initiative |
Both the human and the system can initiate behaviors based on sensed data. The system can coordinate its behavior with the human's behaviors both explicitly and implicitly. The human can understand the behaviors of the system in the same way that he understands his own behaviors. A variety of means are provided to regulate the authority of the system with respect to human operators. |
|
5 |
Fully autonomous |
The system requires no human intervention to perform any of its designed activities across all planned ranges of environmental conditions. |
UAV/UCAV system could depend on level 2 or lower autonomy. The difficulty in communicating with the vehicles, particularly under combat conditions, suggests that level 3 or level 4 autonomy would be required.
ONR 351's UAV/UCAV vision implies that level 5 (fully autonomous) is the ultimate target, but the committee seriously questions this approach. The committee believes that level 5 autonomy for UAVs/UCAVs may not be desirable on the battlefield, regardless of its technical or economic advantages. Combat systems need to be under the supervision of the joint task force/theater commanders to behave as a coordinated force. As a result, the pursuit of level 5 autonomy is not recommended for the UAV/UCAV, although it might be appropriate for some isolated systems that do not participate in an integrated force structure.
Technical Issues in Pursuit of Level 3/4 Autonomy
There are very few technology issues unique to the Navy in the pursuit of level 3 or level 4 autonomy. However, the pursuit of these levels of autonomy is important to the nation, so it would be appropriate for the Navy to pursue them and of benefit to all of the Services. The autonomous operations FNC is an important thrust within the Navy Department for both cost and operational capability reasons.
A review of the autonomy items proposed under the ONR UAV/UCAV 6.2 program indicates that many of the issues are more mature than the issues that 6.2 funding should address. Table 2.2 provides a detailed commentary by the committee on the ONR 351 proposed topics. Italics indicate the committee's recommended 6.2 research areas for the ONR 351 UAV/UCAV program.
TABLE 2.2 Summary Evaluation of ONR's Proposed Autonomy Topics
|
Topica |
Maturity |
Comment |
|
Three-dimensional mapping |
>6.3 |
Fielded systems are available that can create and manipulate three-dimensional representations of objects in real time. This topic is peripheral to level 3 or 4 autonomy. |
|
Sensor and data fusion |
6.1/6.2/6.3 |
An abundance of effort is under way in this challenging area yet basic issues remain unresolved. UAV/UCAV demonstrations of sensor and data fusion are warranted. |
|
Natural language processing |
6.1/6.2/6.3 |
Commercial systems are functioning today yet basic issues remain unresolved. The grounds for this capability are very weakly based on existing air traffic control system limitations. |
|
Adaptation and learning |
6.2 |
This is an important area that would benefit from 6.2 research. However, the behaviors of combat systems should be directly managed as validated knowledge. Not recommended for UAV/UCAV efforts. |
|
Image understanding |
6.2 |
This is an important research area that would benefit from 6.2 effort. The importance of image understanding is based on assumptions about the use of imaging sensors, such as SAR and FLIR. This topic is relevant to ONR UAV/UCAV and recommended for inclusion in 6.2 funding. |
|
Human-machine cooperation |
6.2/6.3 |
While progress in this area has occurred and some capabilities are more advanced than 6.2 funding would imply, there are many issues that have not been addressed in control of unmanned systems. Recommended for ONR UCAV at 6.2 and 6.3. |
|
Behavior-based intelligence |
6.3 |
Another name for level 2 autonomy. Demonstrations in a UCAV mission context are recommended. |
|
Path planning |
>6.3 |
This is a mature technology. Demonstrations are warranted as a part of ONR UCAV, but funded development activities are not. |
|
Multientity control |
6.2/6.3 |
Some value may result from 6.2 funding, but most emphasis should be on 6.3 demonstrations in the UCAV mission context. |
|
Self-organizing systems |
6.1/6.2 |
While this is valuable as a research topic, it does not seem critical to the ONR 351 program. |
|
Planning and control architectures |
>6.3 |
This is a heavily developed area, with many alternatives that could be demonstrated in a UCAV mission context. |
|
Metaheuristicsb |
6.2/6.3 |
Some benefit may result from 6.2 funding, but most of the emphasis should be on 6.3 demonstrations in the UCAV mission context. |
|
Mathematical programming |
>6.3 |
A heavily explored area of marginal relevance to UCAV. Not critical to UCAV. |
|
Hierarchical decomposition |
>6.3 |
Relevant to UCAV, but heavily explored and mature technology. Does not require ONR UCAV 6.2 funding. |
|
a Italics indicate the committee's recommended 6.2 research areas for the ONR 351 UAV/UCAV program. b Metaheuristics combines techniques such as genetic algorithms, simulated annealing, tabu search, fuzzy systems, neural nets, and other hybrid heuristics. |
||
It is not evident from this eclectic list which underlying mathematical and engineering principles unify these topics. To date, autonomous system design appears to be based largely on heuristic rather than structured approaches, and this apparent weakness deserves research attention. The committee believes that the state of the art for some of these autonomy topics is more advanced than represented by the ONR 351 UAV/UCAV analyses. As a result, some effort should be directed to demonstrating the existing technology base in a naval UAV/UCAV context. The demonstration program will leverage the best efforts under way and may reveal shortfalls in technology better than the paper analyses; it may also avoid unnecessary investment in mature technology areas. In general, it is more prudent to demonstrate that gaps in technology exist rather than to simply assume that they exist.
Over the past 18 months, commercial software systems have begun to emphasize autonomous operations in a wide variety of settings. Often labeled “software agent” technology, flexible and autonomous software systems for medical operations, e-commerce, logistics, and manufacturing are rapidly emerging. These systems herald a major shift in information architecture, from centralized (client-server) systems to distributed collaborative computing systems on a large scale. This shift is enabled by the communications infrastructure of the Internet, which allows widely distributed computing resources to collaborate in the performance of enterprise-wide activities.
This emerging trend in commercial software has strong implications for the Navy Department's planned efforts in autonomous systems. Rather than attempt to lead the development of science and technology for all aspects of autonomy, it would be wiser for the Department of the Navy to leverage many of the current commercial software efforts in this area. This would permit S&T funding to focus on a relatively small set of Navy-unique issues at the 6.1/6.2 level, using 6.3 resources to apply the emerging commercially developed technologies to prototype naval platforms and missions.
Commercial software relevant to the command and control of distributed autonomous systems—but not unmanned systems—is being developed at a rapid pace. The most fertile area is in business intelligence and business operations software. One example is supply chain management and logistics. Several commercial software vendors now provide frameworks for collaboration and cooperation between companies. These frameworks provide representations of strategic and tactical interests of the collaborators and provide for information distribution and the synchronization/fusion of data and plans. Some of these systems also interface to real-time process control systems that have dynamics not too dissimilar to flight vehicles.
None of the business-oriented commercial software frameworks will be applicable to the autonomous operations FNC without incentive. A strong 6.3 demonstration program that funds interface development and shows existing frameworks in Navy UAV/UCAV mission contexts could showcase these emerging software packages. By investing in the creation of a broad opportunity to demonstrate existing technology rather than in narrowly funded and possibly redundant 6.2 exploratory work, the Navy Department could make much faster progress toward autonomous operations. This should not be taken to mean that investment in autonomy is not required, but that a larger share of the investment should be directed toward demonstration rather than exploration.
Not all of the Department of the Navy's needs will be met by commercial software development, so investment in 6.2 (exploratory development) is warranted in the areas italicized in Table 2.2. Careful coordination with other research programs at ONR and the other Services is recommended so as to gain the most benefit from the 6.2 funding.
The committee also believes that ONR should consider conducting an active outreach program using 6.2 funding to leverage emerging commercial software technology for autonomy. The objective of this outreach should be to encourage the growth and recognition of a focused autonomy community that facilitates communication and joint development across industry, government, and academia. Professional societies, special interest groups, and regular Department of the Navy-sponsored conferences and symposia could provide a forum for this community.
While the basic technology for autonomous operations is evolving at a rapid pace under commercial pressures, it is very unlikely that commercial software developers will share their successful design and development methods with other companies or the Navy Department. They will consider their successful methods for requirements capture, knowledge development, integration, and test and evaluation to be highly proprietary and of great
commercial value. As a result, the committee believes that the Services will need to invest in methods for characterizing autonomy requirements and for designing to meet these requirements, including test and evaluation methods. Government funding of the effort to identify and describe best practices for autonomy design would give the public access to techniques that they could not obtain commercially.
The committee recommends that ONR should involve itself in specific funded S&T efforts aimed at identifying and publishing best practices for the design, development, and evaluation of complex autonomous military systems.
PROPOSED UAV/UCAV DEMONSTRATIONS
Participants in an ONR-sponsored workshop developed a sequence of eight candidates for applied research and technology UAV/UCAV demonstrations:
-
Mission planning and execution
-
Autonomous, real-time mission/path replanning, obstacle avoidance, and resource allocation;
-
Autonomous and cooperative target cueing and ATR;
-
Takeoff and landing on an air-capable ship in high seas using passive sensors for navigation; and
-
Autonomous in-flight refueling.
-
-
Robust and reconfigurable dynamic network of networks
-
Dynamic Internet-in-the-skies (connectivity and real-time sharing of information) and
-
Mobile positioning systems: jam-resistant, precision geolocation system.
-
-
Autonomous high-speed, high-precision navigation and control
-
Low altitude in-clutter navigation using passive sensors and
-
Autonomous tracking of an intelligent adversary
-
The sequence of the demonstrations was intended to confirm the evolution of UAV/UCAV capabilities such that each successive demonstration builds on its predecessor. There was no indication of the time frame for these demonstrations or how they might relate to near-term UAV/UCAV 6.2 efforts.
One of the hardware platforms Draper Laboratory could make available for these demonstrations is a very interesting small UAV helicopter already capable of modest autonomy in flight control—it can stabilize itself in wind. Several of the proposed demonstrations would use this UAV and hence could be done quickly.
Concerns and Recommendations
While this selection of candidates for demonstration appears to have been a creative exercise, given the uncertainties and incompleteness of the UAV/UCAV thrust, the committee believes it to have been premature. The candidates for demonstration are certainly representative of the kinds of activities that should take place, but they should not be elaborated any further at the present time. In particular, they might well exceed 6.2-level funding and would have to be coordinated with the other Department of the Navy and DOD stakeholders in UAV.
SUMMARY RECOMMENDATIONS
With respect to the ONR 351 UAV/UCAV program, the committee recommends that ONR should do as follows:
-
Strive to become fully integrated within the Department of the Navy UAV/FNC community. The relevant programs—the ONR 351 UAV/UCAV program, the DARPA/Navy UCAV-N, the PEO (CU) VTUAV procurement, the NAVAIR MRE UAV BAA, and the Department of the Navy FNCs—are now largely independent. They should be coordinated according to an agreed-on focus. The Navy should also take advantage of the wide range of results obtained by other Services.
-
Complete the vision and make it more realistic by recognizing the limited applicability of total (i.e., level 5) autonomy, adding an outline of and a timetable for human-machine partnerships through a series of intermediate visions. The mathematical and engineering sciences on which autonomous system design and evaluation will be based should be developed.
-
Engage other appropriate Department of the Navy UAV stakeholders and reexamine their missions to ensure that the UAV/UCAV vision responds to the needs of the whole naval community.
-
Complete the technology roadmaps after this reexamination.
For the critical technologies the committee recommends as follows:
-
Vehicle technology will evolve without being given special emphasis by an ONR S&T program. Accordingly, ONR should plan to invest only in R&D pertaining to (1) missions that are unique to the Navy, such as landing on a ship and ASW-related operations and support, and (2) overall affordability.
-
For communications and networking, the commercial sector will not address all the issues. ONR should focus on secure communications and dynamic networking directly, as it is doing, while continuing to exploit commercial development whenever possible.
-
Sensors and sensor systems hardware will evolve without special attention from an ONR S&T program. ONR should focus on software and algorithms for information extraction and fusion rather than on hardware issues. A much-better-focused program of enabling technology development and demonstration than seems to have been put in place so far is essential if limited funds are to produce significant results.
-
For autonomy, the commercial sector will not address all of the Navy's needs. ONR 6.1/6.2 investments are warranted in several important areas—image understanding, human-machine interaction, multientity control, and metaheuristics—as well as in a systematic examination of the scientific and engineering principles upon which autonomous operations are based. Careful coordination with other R&D programs of the Navy and the other Services is recommended. ONR should leverage commercial software to emphasize naval-unique applications, demonstrations, and exercises, and it should encourage the formation of a community focused on autonomy that facilitates communication and joint development across industry, government, and academia by means of Navy-sponsored symposia and the like. Finally, the committee recommends that ONR should specifically fund S&T efforts aimed at identifying and publishing best practices for the design, development, and evaluation of complex affordable autonomous military systems.
















