
3
Integration with Other Related Department of the Navy and Department of Defense Efforts
INTRODUCTION
The committee was given information on relevant Department of the Navy and Department of Defense (DOD) unmanned aerial vehicles (UAVs) and uninhabited combat air vehicles (UCAVs) programs so that it could assess the ONR UAV/UCAV program with respect to its relevance for meeting naval priorities, its cost and time scale, duplication of effort, and scientific and technical quality. Figure 3.1 compares the UAV and UCAV programs presented to the committee.
PROGRAM ISSUES
The Department of Defense's history of UAV technology has been long, complex, and often frustrating to those advocating rapid development. The United States had early success with remotely piloted vehicles (RPVs) in the form of remotely controlled aircraft for radiation monitoring during the South Pacific atomic bomb tests in the 1950s and modified target drones (AQM-34, Buffalo Hunter) for high-altitude photoreconnaissance over North Vietnam in the 1960s. But even after Israel's successful demonstrations in the 1973 Yom Kippur War, the U.S. military exhibited little interest in tactical UAVs (TUAVs), and it took literally decades for enthusiasm to build.
The 1980s saw the beginnings of interest as both the Army and the Navy attempted to develop and field a TUAV. The Army's Aquila program, plagued by creeping requirements and lacking a strong sponsor, spent about $1 billion before it was finally cancelled in 1988, making many decision makers wary of UAVs. However, the 1980s produced one notable UAV success—the Navy's Pioneer. Military operations in Libya, Lebanon, and Grenada had shown the need for an inexpensive over-the-horizon reconnaissance and targeting capability. In response, the Navy, in 1985 and 1986, quickly acquired and deployed the Pioneer through a fly-off competition between contractor-funded candidates. In Operation Desert Storm, the Pioneer's documented success in supporting combat operations and providing timely battlefield intelligence at last gave the United States its own clear proof of the battlefield potential of TUAVs.
And so in the 1990s, UAV developments began to accelerate. There was still little overall coordination by the DOD, and the Army, Navy/Marine Corps, Air Force, and DARPA pursued (with few exceptions) independent development paths. Most of these UAV thrusts arose bottom-up from the enthusiasm of individuals or organizations rather than top-down from a recognition by the Services or the DOD of the value and potential of UAVs and the need for them.
Army UAV Programs
After first deploying the Pioneer jointly with the Navy, the Army opted to develop its own low-altitude reconnaissance TUAV, the Hunter. Initiated in 1989, the program advanced to the point of selecting a single contractor in 1992, with low-rate initial production (LRIP) in 1993. Yet by 1997, production was stopped as the projected requirements of future systems seemed to be quickly outrunning the Hunter's capabilities. Nevertheless the existing Hunters were deployed in 1999 in Kosovo, where they performed well.
After participating in a joint Army/Navy advanced concept technology demonstration (ACTD) with the Outrider TUAV, the Army again began to develop another low-cost TUAV, culminating in a fly-off competition between four candidates, including the Outrider. In December 1999, the Shadow-200 TUAV was selected and an engineering and manufacturing design (EMD)/LRIP contract for four systems awarded. Each system includes three air vehicles and the associated ground control, launching, and logistic elements. Testing and evaluation (T&E) are scheduled for the third quarter FY01.
Air Force UAV Programs
The Air Force's Predator, a medium-altitude endurance (MAE) UAV with electro-optical (EO)/infrared (IR) and synthetic aperture radar (SAR) sensors was developed in the mid-1990s as an ACTD managed by the Defense Airborne Reconnaissance Office (DARO) and eventually assigned to the Air Force by the Pentagon. Built in large numbers (~50 so far), the Predator was deployed to Europe several times in the second half of the 1990s and became the best-known and best-performing UAV in the air campaign in Kosovo. The Predator can be expected to remain in service many years as lost vehicles are replaced and performance enhancements applied.
In addition to the Predator, the Air Force also has several large and ambitious UAV activities under way with DARPA: the Global Hawk high-altitude endurance (HAE) UAV, which grew out of another DARPA/DARO ACTD of the mid-1990s, and a more recent UCAV ATD program.
Intended to demonstrate “the technical feasibility for a UCAV to effectively and affordably prosecute 21st century SEAD/strike missions . . . ,”1 the UCAV program began in 1998 with multiple contractor study phase and is now well into detailed design and fabrication by a single contractor. First flights are scheduled for FY02 and are intended to demonstrate “human-in-the-loop detection, identification, location, real-time targeting, weapons authorization, weapons delivery and target damage indication.” Multivehicle coordination in flight is envisioned for the later demonstrations.
Navy UAV Programs
During much of the 1990s the Navy seemed content with the Pioneer. However, toward the end of the decade a more focused UAV effort developed. Responsibility for determining and addressing requirements for the Navy UAV program as a single Navy point of contact and for directing programming and budgeting for all Naval UAV programs was assigned to the Aviation Systems (N854) organization of the Chief of Naval Operation's Expeditionary Warfare Division (N85).
The situation evolved rapidly in the last 2 years. The following description and comments pertain to the situation at the time of this writing. In 1998, the Naval UAV Executive Steering Group (ESG) was created to “provide a forum for coordination of Navy/Marine Corps UAV issues, [to] develop and validate the Naval UAV roadmap and [to] speak with one voice for Naval UAV issues.”2 Chaired by N85, the ESG has representation from a wide range of Navy and Marine organizations, including the Surface Warfare Division (N86), the Air Warfare Division (N88), the Program Executive Office for Cruise Missiles and UAVs (PEO CU), the Marine Corps Combat Development Command (MCCDC), NAVAIR, NAVSEA, and SPAWAR.
|
1 |
Lt Col M. Leahy, USAF, “DARPA/USAF UCAV ATD,” briefing to the committee, October 12, 1999. |
|
2 |
MajGen Dennis Krupp, USMC, Director of Expeditionary Warfare, N85, “Naval UAV Executive Steering Group,” briefing to the committee, October 16, 1999. |
The ESG has created a Navy UAV roadmap that envisions the Pioneer being replaced in FY03 to FY05 by a vertical takeoff and landing tactical uninhabited aerial vehicle (VTUAV), to be developed; a Navy MAE or medium-range UAV, to be fielded in FY06 to FY14; and a Navy UCAV, to be fielded in the more distant future (FY15 to FY25). Mini/expendable and micro-UAVs were also postulated for the out years from FY06 on. In the near and medium-term future, rather than competing with the Air Force for organic HAE (Global Hawk) and MAE (Predator) capabilities, the plan reasonably proposes achieving interoperability with these systems via the Tactical Control System (TCS), which comprises the software, software-related hardware, and ground-support hardware necessary for the control of Predator and other advanced UAVs (e.g., UCAVs) and which also ensures receiving and disseminating real-time UAV imagery and data (e.g., from Predator and Global Hawk).3
Following this plan, the PEO (CU), after a fly-off of competing designs, awarded a contract in February 2000 for the engineering and manufacturing development of the helicopter-like VTUAV. In addition, NAVAIR recently issued a broad agency announcement (BAA) for a study of an advanced multirole endurance (MRE) UAV that will provide reconnaissance, surveillance, targeting, and attack (RSTA) and communication relay capabilities and that will be capable of both austere land-based and sea-based operation. Thus, two major Department of the Navy UAV thrusts have just begun in response to the ESG's UAV plan.
In retrospect, the ESG plan, while broad in scope, seems to be weak in terms of requirements leadership and may not be as ambitious as it could have been, for events have overrun it. Toward the end of 1999, DARPA approached the Navy, going not through N85 and the ESG but directly to the CNO, and proposed a joint DARPA/ Navy version of the existing DARPA/USAF UCAV ATD; the proposal was accepted. It may be recalled that UAVs were on the ESG's long-range plan, but for the far future, with fielding projected after FY15.
Now called UCAV-N, this nascent ATD seeks to leverage the existing DARPA/USAF UCAV effort and technology with an infusion of DARPA funds and to focus on Navy-unique issues such as shipboard operation and ship design, mission control integration with existing naval systems, naval concepts of operations (CONOPS) for the suppression of enemy air defense (SEAD), strike and surveillance, and affordable operations and support (O&S). Phase 1 studies and analysis with multiple contractors will begin this year.
NAVAIR and the ESG have little choice but to absorb this UCAV program and adjust the roadmap and perhaps some near-term plans. In addition, the Office of the Chief of Naval Operations Air Warfare Division (N88), already a member of the executive committee of the ESG, will be taking on a larger role in UCAV. The DARPA initiative has managed to inject a good deal of excitement and some accompanying confusion (at least for the time being) into the Navy UAV community. The UCAV-N program will have a big impact on the Navy's future UAV programs, providing a strong and well-funded focus for advanced concepts.
Simultaneously and quite independently of the UAV community, the Department of the Navy decided to restructure its S&T programs into 12 future naval capability (FNC) “spikes” to enhance the effectiveness of its S&T efforts by providing critical mass funding to selected technologies deemed critical to the future of the Navy Department. At least 5 of the 12 FNCs bear on UAV missions and technology, with the two most relevant—time-critical strikes and autonomous operations—coincidentally operating out of the ONR 351 organization.
The ONR 351 UAV/UCAV Program
It is into this traffic-filled environment that the ONR 351 (6.2) S&T program is being launched. In creating its ambitious UAV/UCAV vision and the associated critical technology roadmaps, ONR 351 has so far not coordinated its activities with the other Navy Department and DOD participants in the UAV/UCAV arena. This is a dangerous approach when there is competition for resources and funding, and it must be corrected. On the other hand, independence is not entirely without merit, for ONR 351's extraordinary vision addresses head-on several issues that have been underplayed, unaddressed, or unappreciated by the other programs (requirements
|
3 |
The committee did not review the Army's Tactical Exploitation System (TES) or the USAF's deployed transit system (DTS), which are also relevant to UAV/UCAV objectives. These efforts already contain level 4 capability and are along a path that integrates all sensor data. |
leadership) and that may have been difficult to evolve in the context of the much nearer term projects. These issues include the following: the role, potential, and manifestations of autonomy technology in future UAV systems; the many communication/networking and sensor fusion issues arising from the UAV-to-UAV cooperative behavior that is inherent in the full realization of network-centric concepts; and, finally, the laudable attempt to create UAV/ UCAV technology roadmaps to guide the S&T investments. While all the UAV/UCAV programs and plans address technology from the point of view of its existence and maturity, none try to plan for driving the technology in the right direction, as was the goal of ONR 351's effort.
Even the current OSD UAV Master Plan, which attempts to coordinate all Department of Defense UAV activities, fails in this respect by addressing primarily budgets and development/deployment schedules. The committee believes that a DOD-wide S&T roadmap for UAVs would be extremely useful for all the Services.
The Department of Defense technology development approach (TDA) is an existing process that the Navy could use to ensure that ONR S &T programs are planned and executed in coordination with other Navy agencies, other Services, and other leading industry, government, and university participants.
One of the key TDAs that relates to UAV/UCAV is the Department of Defense fixed-wing vehicle (FWV) TDA. Other TDA areas, such as integrated high-performance turbine engine technology (IHPTET), avionics (which covers architecture; radio frequency (RF) and electro-optical (EO) sensors, signals, and data processing; and information management), and rotary wing (RW), to name just a few, are also relevant to UCAVs.
The TDA calls for an integrated plan and agreed-to partitioning of work among the Services, industry, and NASA. All participants are part of the planning process and are required to commit themselves to achieving results in their portion of the work. Furthermore, TDA plans and programs include descriptions of key payoffs (to the warfighter), goals (at the system level), and objectives (for the technology developers).
The payoffs, goals, and objectives are quantified and measured periodically. Goals, such as doubling engine thrust-to-weight ratios over a given number of years (for IHPTET), and the specific technology objectives that correspond to those goals are critical for connecting the S &T developers to operational benefits and ensuring ontime delivery of mature technologies.
From many points of view the ONR 351 program is highly complementary to the rest of the Navy's UAV activities and clearly should be integrated with them and coordinated and exploited by them, albeit somewhat after the fact. Unfortunately, in view of its projected small size (only a few million dollars in 6.2 funds per year), it may very well be simply eaten up in the struggle for resources.
Research and Development Funding
The coordination difficulties facing the ONR 351 UAV/UCAV program are not unique. A general lack of alignment between ONR S&T investment plans and the operational needs of the Navy has impelled the Navy to initiate the FNCs process. The core of the problem is that the budget authority flow-down process at ONR creates stovepipes 4 of interest. To some, this amounts to investing seed money to accelerate research in areas of interest. To others, the investment plans appear unrelated to the Navy's needs. The FNC process will realign a significant portion of the Navy's S&T budget to the areas of greatest interest to the Navy. The committee expects that it will cause increased amounts of ONR budget to be shifted to FNCs and that eventually the S&T planning and budgeting process will be overhauled.
It is important to remember that the goals of 6.1 and 6.2 research are to look out for the needs of the “program after next.” The basic research community should not be overly taxed to support UAV/UCAV development programs; it should, however, be aware of what is going on, the capabilities being developed, the lessons learned, and the remaining challenges. When there is a problem with the near-term programs that the community alone can solve, it should do so. However, its main goal is to postulate an exciting future and then to work on the technical
|
4 |
The term “stovepipe” refers to a program that stands alone, i.e., is constructed and supported to work by itself. |
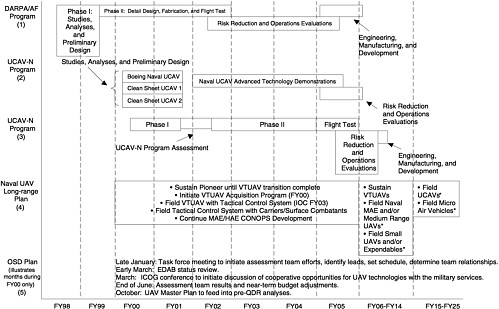
FIGURE 3.1 UAV/UCAV programs and projected timetables presented to the committee. *Notional timeline for field if determined to be a naval requirement. SOURCE: Adapted from material provided by the following (keyed to entries on vertical axis): (1) Lt Col Michael Leahy, USAF, Program Manager, “DARPA/ USAF Unmanned Combat Air Vehicle Advanced Technology Demonstration: Phase I Results and Look Ahead to Phase II,” briefing presented to the committee, December 13, 1999; (2) A. Duncan Brown, Assistant for Science and Technology, Office of the Chief of Naval Operations, N8T, “Naval Unmanned Combat Air Vehicle,” briefing presented to the committee, January 18, 2000; (3) John F. Kinzer, Office of Naval Research, “Naval Unmanned Combat Air Vehicle,” briefing presented to the committee, December 13, 1999; (4) MajGen Dennis Krupp, USMC, Director, Expeditionary Warfare, N85, “Naval UAV Executive Steering Group (ESG),” October 16, 1998, distributed by CDR Osa E. Fitch, USN, to the committee, January 19, 2000; (5) Ronald E. Mutzelburg, Deputy Director Air Warfare, Office of the Secretary of Defense, “Unmanned Aerial Vehicle Planning Cell: OUSD (AT&L) and OASD (C3I),” briefing presented to the committee, January 18, 2000.
enablers to make that future possible. The basic research community must be granted considerable leeway in imagining the future: the details are cloudy and even major assumptions will need revision over time. However, the main technical foci will tend to be independent of the particular assumptions that are made. Whether or not the Global Positioning System (GPS) will be jammable, for example, does not affect the overall assessment that an ensemble of UAVs/UCAVs will need a high degree of autonomy, self-organization, and adaptivity.
There are three areas in applied research that need coordination by ONR. The first is duplication and prioritization with the projects and demonstrations in the FNCs. Six of the twelve FNCs may overlap with the ONR 351 UAV/UCAV program: autonomous operations, time-critical strike, information distribution, littoral ASW, and organic mine countermeasures.
The second area needing coordination is ONR 351 alignment with the UCAV-N program. This will be primarily a matter of synchronizing with the DARPA/USAF UCAV technology database and phasing the Navy 's S&T accordingly.
The third area needing coordination is alignment with N85, the Naval UAV ESG, and the several current UAV-related thrusts of the Department of the Navy—for example, the PEO (CU) VTUAV procurement and the NAVAIR MRE UAV BAA—and their requirements for technology refreshment and an expansion of mission and capabilities.
TECHNOLOGY ISSUES
Overriding Concerns
In addition to the program issues discussed above, the committee believes that three key technology issues inherent in the ONR 351 UAV/UCAV vision and plans have broad implications well beyond the confines of that specific vision:
-
Software engineering,
-
Autonomy, and
-
Network-centric operations.
Software Engineering
One of the primary attractions of adding UAV/UCAV technology to the naval force structure is that it can be much less expensive than other options such as crewed aircraft and single-use cruise missiles. For example, the DARPA/Air Force UCAV program is aiming for a unit cost one third that of the Joint Strike Fighter. Historically, aircraft cost has been proportional to takeoff weight, and UAV/UCAVs are projected to be significantly smaller than current tactical aircraft. However, avionics now account for 30 to 40 percent of the development cost of a new tactical aircraft, and a significant portion of the avionics development cost is accounted for by the software. While UCAV avionics requirements are different from those of crewed vehicles (autonomous functions replace human-machine interfaces, for example), they are not necessarily less expensive. Thus, unless the avionics and software development costs can be dramatically reduced, they could consume the entire UAV/UCAV development budget.
In the context of UCAVs, software engineering offers the 6.1 and 6.2 research communities a challenge and a real opportunity. The challenge is that without significant improvements in the software cost drivers—such as integration, verification, and reliability—UAV/UCAV may lose its attractiveness as a potentially low-cost force augmenter. The opportunity is that never before has a program concept been more dependent on new software engineering paradigms or more receptive to their introduction.
Technical areas in software engineering that are of specific interest to UAV/UCAV or that present targets of opportunity include the following:
-
Model-based software engineering,
-
Software maintenance and revalidation, and
-
Software integration.
Model-based software refers to formal, semiautomated methods used to derive software-level requirements from system-level models (the models referred to are heuristic rather than physics-based). Another approach to the same problem might entail very high level, highly dynamic, and self-adaptive programming techniques.
Software maintenance and revalidation are always needed since fielded software requires continual updating to correct problems and enhance capabilities. Validation is extremely lengthy and costly compared with the time and costs of evolving microelectronics hardware.
Problems associated with software integration are the driver for many of these difficulties. These problems have been exacerbated by the fundamental change in the role of avionics software: from being a federation of relatively simple control loops it has become a fabric that keeps the aircraft together.
Also, the replacement of the pilot by autonomous software offers an opportunity to rearrange the partitions between avionics and decision making, since they are now all part of one large software system.
These are very hard technical problems, problems that have been attacked many times with only limited success. They are not peculiar to UAVs/UCAVs, but the program's success is crucially dependent on their resolution. The continuing explosion of hardware capabilities may enable directions not hitherto practical.
What is needed is fundamental technical groundwork rather than just clever ad hoc fixes. Its importance to naval systems in general and to UAVs/UCAV sin particular implies that the entire Department of the Navy (not just ONR 351) should consider whether it has sufficient commitment to basic research in software engineering, especially in the 6.1 area.
The difficulty here is that while every operational program needs software, no such program wants to spend the time and money to acquire the fundamentals. This kind of basic research must be funded separately from the system and equipment developers while still maintaining close contact with them. The Navy should consider supporting basic efforts in this area and should ensure that they are closely coordinated with similar efforts across the DOD.
Autonomy
The Department of the Navy has signalled that it recognizes the potential importance of autonomous operations by establishing autonomous operations as an FNC. This FNC provides a focus for efforts to develop air, surface, and subsurface autonomous platforms that meet the need for extended, remote operations in high-risk settings. Many of the S &T issues underlying the operation of highly autonomous platforms are common across both platform environment and mission type.
There are currently no widely accepted definitions nor is there any structure for organizing the investigation of system autonomy. Because there is no common framework for describing levels of autonomy and the functionality required to support them, it is difficult to recognize how the general principles of autonomy could be applied in any of the prototype research systems as currently implemented. This lack of a common framework impedes the S&T development efforts of the Navy and the other Services in three ways:
-
The requirements for autonomy and the corresponding scope and budget of the S&T effort to support autonomy are difficult to express.
-
Specific goals for autonomy in different mission and platform settings are difficult to express across research areas, and progress toward those goals is difficult to assess.
-
Duplication of effort and lack of research coordination reduces the effectiveness of the available funding.
The decision to employ a technology in a military system is based on the expectation that the technology will improve the lethality, survivability, or affordability of the system. Recognizing that the Navy S&T support for the autonomous operations FNC will need to quantify the expected benefits of this emerging technology, the committee recommends that ONR, aligned with the autonomous operations FNC, should develop a comprehensive framework for defining levels of autonomy and characterizing the functional elements and potential military
benefits of each of the levels of autonomy. Such a framework should be applicable to air, surface, and subsurface missions and platforms and would be a valuable contribution to the military. The committee also believes that ONR should consider developing and conducting a series of autonomy competitions and demonstrations based on naval missions and platforms in order to attract the attention of commercial suppliers and encourage them to address Navy problems.
As a result of the rapidly growing commercial interest in software systems with high levels of autonomy, the Navy S&T programs in autonomy are not state of the art. Given the large commercial investments, neither the Navy nor any other Service is likely to achieve a leading position in S&T to support autonomous operations. It is clear that few, if any, of the fundamental issues in autonomous systems are unique to the Navy. However, the committee believes that the Navy should remain a participant in this technology area so that it will be able to leverage promising technologies as they emerge.
It is unlikely that commercial developers of autonomous system software and hardware will be motivated to apply their technology to Navy platforms and missions without substantial encouragement from the Navy. This encouragement might take the form of small-scale demonstration opportunities with broad participation and modest funding for the participants. A good example of such a demonstration environment is the annual weeklong unmanned underwater vehicle exercises conducted by the Naval Oceanographic Office for unmanned tactical oceanography vehicles.
In addition, the committee believes that ONR should consider developing and conducting a series of autonomy competitions and demonstrations based on naval missions and platforms. The competitions and demonstrations should facilitate participation by small businesses and academia by offering modest funding to cover some of the costs of their participation. In this way, ONR could adapt emerging technology to naval needs without necessarily developing new technology.
Network-Centric Issues
The Chief of Naval Operations (CNO) recently declared that the Navy would be shifting its operational concept from one based on platform-centric warfare concepts to one based on network-centric warfare concepts. Network-centric operations (NCO), in this concept, are military operations that exploit state-of-the-art information and networking technology to integrate widely dispersed human decision makers, situational and targeting sensors, forces, and weapons into a highly adaptive, comprehensive system to achieve unprecedented mission effectiveness. 5
The Navy, in conjunction with the Marine Corps, is moving rapidly to implement NCO. UAVs will become vital elements in future NCO since they will deploy situational and targeting sensors and weapons (in the case of UCAVs) and—depending on the degree of autonomy that is possible and authorized—will be part of the decision-making process.
Unfortunately, the implications of this shift to network-centricity have not yet been addressed explicitly in ESG's and N85's requirements and plans. It is into this gap that ONR 351 has jumped with its cooperating swarms of UAVs/UCAVs and its excellent analysis of the issues surrounding communications and dynamic networking. However, although ONR 351 described its vision as being network-centric, and many of the implied technical issues were treated, it used the term network-centric superficially and failed to address many other NCO-related issues, constraints, or requirements in a substantive manner.
For example, ONR 351 implied that the UAV/UCAV swarms would operate as a world unto themselves, communicating and cooperating only with each other. However, any ONR program in UAV/UCAVs will need to address how they would be integrated with and operate within a global naval network architecture connecting all sensors, weapons, forces, and command and control structures.
|
5 |
Naval Studies Board, National Research Council. 2000. Network-Centric Naval Forces: A Transition Strategy for Enhancing Operational Capabilities. National Academy Press, Washington, D.C., p. 1 |
UAVs/UCAVs would incorporate highly sophisticated sensor subsystems capable of detecting and tracking targets of interest and of observing damage to attacked targets. Such information is critical to decision makers outside the postulated UAV/UCAV community of autonomous vehicles and will need to be provided in real time from the UAV platforms through the NCO network.
Since the airspace within which UAVs/UCAVs operate will need to be deconflicted using other operational air vehicles and missiles, the command control structure will need to be given the instantaneous location of deployed UAVs/UCAVs via the NCO network. The control of UAVs/UCAVs by ship-based and land-based commanders will also be implemented via the NCO network. Initially, such control will be teleoperative; that is, commanders will transmit very detailed instructions for flight path, maneuvers, and weapon release, but as the vehicles become more capable, trustworthy, and autonomous, only high-level commands will need to be transmitted. As UAVs/UCAVs become more autonomous and start to operate in cooperative swarms, the deconfliction challenge will become increasingly difficult.
The committee believes that all Navy UAV/UCAV programs, and the ONR 351 program in particular, must address all of these challenges, using the considerable wide-bandwidth capabilities of the naval NCO network to do so.
GENERAL CONCERNS
The committee had the following general concerns:
-
Unmanned aerial vehicles appear to have very little requirements leadership in the Department of the Navy. The current leadership offered by the responsible Navy Department organizations seems to move slowly, envisions only relatively near-term scenarios, and is currently supporting independent multiple thrusts, as yet uncoordinated, without a clear unifying focus on the full potential of UAVs.
-
A Department of the Navy UAV/UCAV master plan is needed that is more comprehensive than the current Naval UAV ESG plan. It should include S&T components as well as system concepts that explicitly acknowledge the existence of other UAV/UCAV plans and programs outside the Department of the Navy.
-
UAV S&T coordination across the DOD community is inadequate. In addition, a Department of Defense S&T roadmap for UAVs is needed, perhaps as a supplement to the current OSD UAV master plan. Stimulated by the campaign in Kosovo and targeted for completion in June 2000, the current OSD plan does address DOD-wide scheduling and funding roadmaps for the accelerated fielding of UAVs but does not explicitly address S&T issues.
-
Software development and cost are an increasingly critical issue for all complex computer-based systems. While everybody uses software, few, if any software organizations are responsible (or funded) for the creation of the much-needed software development tools and techniques.
-
There seem to be no systematic approaches or tools available for partitioning functions between various machines (e.g., platforms, flights, C4ISR nodes) and human beings or for assessing the military benefits of autonomy. The mathematical and engineering sciences on which to base autonomous system design and evaluation need development. Autonomy is crucial, and the military will have to invest to exploit and extend what the private sector develops.
-
Network-centric compatibility must be an integral part of any Department of the Navy UAV/UCAV future vision. Requirements must be worked up in the context of a true system-of-systems architecture, and there must be freedom to adjust the rest of the force structure to take advantage of UAV/UCAV contributions.










