
1
Introduction
Robots, including unmanned ground vehicles (UGVs), have many valuable attributes that will aid and complement soldiers on the battlefield. They are well suited to perform routine and boring tasks. They are fearless and tireless. They do repetitive tasks with speed and precision. They can be designed to avoid or withstand enemy armaments and to perform specific military functions. Most importantly, robots can reduce casualties by increasing the combat effectiveness of soldiers on the battlefield. The scenario in Box 1-1 illustrates many of these advantages.
The Army has recognized the potential of robotics for well over 20 years. Capitalizing on early work by the Defense Advanced Research Projects Agency (DARPA), the Army has sponsored basic and advanced research in intelligent systems and led developments in crew automation technology and in tactical unmanned air vehicles (UAVs). At the same time, it has successfully adapted commercial teleoperated ground vehicles for specialized military uses such as mine clearing, and it has made initial progress toward developing semiautonomous ground systems for combat. Appendices C and D provide detailed descriptions of much of this early work.
Since the Gulf War, an urgent need has surfaced to transform the Army from one characterized by heavy armor and firepower into a lighter, more responsive force that is at once more lethal and survivable. Concepts for the Army’s Future Combat Systems (FCS) include unmanned systems, both ground and air, and will be required for fielding with other elements of the FCS as early as 2010. This report documents a study to assess the readiness of UGV technologies to support the development of the Army’s Future Combat Systems. This first chapter provides background information, including the statement of task, study approach, and report organization.
BACKGROUND
The impetus for the study came from increasing awareness that shortcomings in robotic research and development have a potential to disrupt the ambitious schedule for design and acquisition of the FCS. The FCS program, now in early conceptual design phase, will play a central role in providing the combat systems that enable a “transformation” of the present-day Army into a future Objective Force. Figure 1-1 illustrates the three-pronged thrust of the transformation campaign and how the Objective Force is dependent upon timely research and development of new system concepts.
The Army desires that UGVs be utilized as part of the FCS (TRADOC, 2001a). Early FCS concepts considered UGVs that would serve in such roles as logistics carriers, remote weapons platforms, soldier companions, or surrogates for reconnaissance, surveillance, and target acquisition (RSTA). Recognizing their potential impact, Congress has mandated that at least one of every three future Army combat systems be unmanned (Congress, 2000). So, UGVs will definitely be part of the future Army, but the question is “When will requisite UGV technologies be in place to support the development of UGV systems?”
Statement of Task
The Assistant Secretary of the Army (Acquisition, Logistics, and Technology) asked the National Research Council to conduct a study to examine the overall Army program for unmanned ground vehicle (UGV) technology, with attention to the following tasks:
-
Review Army operational requirements for UGVs, including the Army Future Combat Systems (FCS)
|
BOX 1-1 A Glimpse of the Future The United States and its allies have enjoyed notable success in the long campaign against worldwide terrorism. A significant contributor to this success has been the evolution of manned ground and airborne forces into integrated teams of unmanned ground and airborne vehicles and highly trained manned forces. As a result unmanned ground vehicles have evolved from logistics support, rear guard activities, and simple scout missions to full membership in integrated combat teams. These teams live, train, and deploy together and the combination of manned and unmanned ground and airborne elements has significantly improved the survivability of manned forces. A key to success in achieving these goals was a definitive set of Army requirements and mission needs statements that were driven and guided by the Training and Doctrine Command (TRADOC) concept guidelines. In 2025 these integrated forces, largely made up of globally deployable Hunter-Killer teams, are supported by a superb sensor, information processing, and communications infrastructure. Unmanned and airborne and satellite assets provide birth-to-death tracking of adversaries for tactical forces anywhere on the globe. This capability combined with global maps achieving 1-meter resolution is used to pinpoint geographic locations of adversary forces, logistics, and equipment. Information from integrated, multiband sensor suites aboard airborne and some ground vehicles is processed and fused into a common operating picture of the battlefield. The capability to support this information sharing/processing is provided by a wireless network of unmanned airborne and ground nodes using LPI communications and redundant communications links. Individual combatants, both human and machine, are linked to each other, and to their commanders by this information system. Ground commanders are able to direct unmanned airborne and ground weapons and sensor systems in real time in support of their operations. The underlying technology to support this integrated force structure has been based on a system architecture designed to accommodate interoperation and evolution through rapid prototyping and subsequent field testing. A critical element in achieving this goal is the superior mobility and survivability of the unmanned ground vehicles. This was made possible through advanced combinations of wheeled/tracked technology and direct drive electric technology and such highly efficient electric power generation systems as fuel cells and energy recovery systems. The heretofore missing element of cooperative behavior has been enabled by significant improvement in cognitive systems ranging from simple self diagnosis and repair to planning/adaptation and recognition/understanding of targets and the surrounding environment and subsequently to reasoning and decision capabilities. This cognitive capability has also been used to implement the supporting information networks that now can not only carry out fault management as in earlier times but also repair and reconfigure the network based on policy-driven feedback. Such systems are also capable of incorporating new behaviors and learning from peer elements. Modeling and simulation have played a key role in the evolution of the integrated force concept largely by exploiting training, simulation and entertainment industry technologies. This has enabled realistic training of soldier and machine and led the evolution of tactics needed for advanced combat systems. Onboard computing has allowed the training and refinements to extend beyond garrison and field exercises to actual deployments to remote locations around the globe. The resultant feedback to system designers and planners has accelerated the rate of improvements. In June 2025 intelligence networks determined that a major initiative by hostile forces would take place in Central Asia aimed at toppling a government friendly to U.S. interests. In response to this threat a clandestine joint Hunter-Killer team was sent on a mission to block infiltration by a terrorist group through remote highland desert. As part of this mission, a squad of 10 networked robotic units was sent to guard a strategic mountain pass 150 km from the base camp and to prepare an ambush for any forces trying to penetrate through this pass. The ordnance available for the mission ranged from long-range rockets to machine guns and armor-piercing projectiles. The units had been on station for four days before the small advance scout units, which were carried to the ambush site by the large units, signaled the approach of a lightly armored camouflaged force with significant infantry in attendance. By means of a sophisticated communications scheme humans and robots made the decision to engage. Unmanned air vehicles were launched from the squad at the beginning of hostilities to provide targeting information and battle damage assessment. The resultant battle totally decimated the attacking force and prevented infiltration by a large force into the territory of a U.S. ally. Four of the team members sustained minor damage from small-arms fire before completely neutralizing the infiltrating force. In the process Unit 10, a rocket platform, was damaged, rendering it unable to return to the staging area. A fellow team member took the damaged unit in tow and successfully returned it to friendly territory for repair. Increasingly, robotic team members are “taking the point” and keeping soldiers out of harm’s way. |
-
baseline program, the Army Research Laboratory (ARL) UGV science and technology objective (STO), and other UGV requirements.
-
Review the current Army UGV efforts at ARL and the Army Tank-Automotive Research, Development and Engineering Center (TARDEC) and respond to the following questions:
2.a. Will the Follower UGV Advanced Technology Demonstration (ATD) lead to a capability that will meet stated Army operational requirements in time to be integrated into the baseline FCS development program?
2.b. Will the ARL STO program result in significant advances in UGV autonomy beyond that achieved
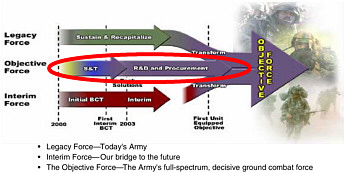
FIGURE 1-1 Army transformation to the Objective Force. SOURCE: Andrews (2001).
-
in the Follower UGV ATD (advanced technology demonstration), and what operational requirements would the resulting capability be able to address?
2.c. How do the Army UGV efforts interrelate with other government ground robotics initiatives (e.g., National Aeronautics and Space Administration [NASA] rovers, Department of Energy [DOE] programs, Defense Advanced Research Projects Agency [DARPA])?
-
Review the state of the art in unmanned vehicle technologies applicable to UGV systems (e.g., “intelligent” perception and control, adaptive tactical behaviors, human–system interfaces) and respond to the following questions:
3.a. What technologies should next be pursued, and in what priority, to achieve a UGV capability exceeding that envisioned in the ARL STO?
3.b. Are all the necessary technical components of a UGV technology program identified and in place, or if not, what is missing?
3.c. Are there foreign UGV technology applications that are significantly more developed than those of the U.S. that, if acquired by the U.S. government or industry through cooperative venture, license, or sale, could positively affect the development process or schedule for Army UGV systems?
3.d. What technology areas merit further investigation by the Army in the application of UGV technologies in 2015 or beyond?
-
Identify issues relating to technical risks and the feasibility of implementing applicable UGV technologies within the FCS baseline program time frame and respond to the following questions:
4.a. What are the salient uncertainties in the “intelligent” perception and control components of the UGV technology program, and are the uncertainties technical, schedule related or bound by resource limitations as a result of the technical nature of the task, to the extent it is possible to enunciate them?
4.b. What are the salient uncertainties for the other main technology components of the UGV technology program (e.g., adaptive tactical behaviors, human–system interfaces, mobility, communications)?
4.c. Do the present efforts provide a sound technical foundation for a UGV program that could meet Army operational requirements as presently defined?
-
Document the results of the examination in a study report that will be provided to the Army. The report will contain a recommended roadmap for the development of UGV technology and systems, including topics that could be the subjects of investigations of longer-term (2015 and beyond) UGV technology applications. It will also respond to the following questions:
5.a. From an engineering perspective, what are reasonable milestone dates for a UGV system development program leading to production? For example, does the current FCS program have a coherent plan and roadmap to build UGVs for FCS and the Objective Force?
5.b. What can be recommended on the technical content, timelines and milestones based on these assessments?
5.c. Are there implications for Army support infrastructure for a UGV system? For example, will other technologies need to be developed in parallel to support a UGV system, and are those likely to pose significant barriers to eventual success in dem-
-
onstrating the UGV concept or in fielding a viable system?
Answers to the questions in the latter four tasks are highlighted in text boxes at appropriate points in the report, and a list of these text boxes with page numbers may be found in the front pages. The study was not requested to focus on unmanned aerial vehicles (UAVs), but these systems are very likely to be included in the FCS. While focusing on UGVs, the study does evaluate technology areas that are common to both air and ground autonomous systems.
Study Approach
The starting point for the study was a meeting of the NRC Board on Army Science and Technology (BAST) convened at the request of the Assistant Secretary of the Army (Acquisitions, Logistics, and Technology) (ASA [ALT]) in June 2001. This meeting discussed the statement of task for the study and determined the expertise that the study committee would need.
A primary source document for the study was the Army Science and Technology Master Plan (ASA [ALT], 2001a), which describes the Army science and technology program, and the UGV technology roadmap developed by the Office of the ASA (ALT) (ASA [ALT], 2001b). The latter document includes an evaluation of UGV technologies based on capabilities for UGVs as determined by the Army’s Training and Doctrine Command (TRADOC) in 2000, and it provided a baseline for the committee’s technology assessments. Another notable source was an Army Science Board (ASB) study that summarized representative force capabilities appropriate for unmanned ground vehicles (ASB, 2001).
Lacking an approved requirements document for the FCS, or for any specific UGV systems that might be included in the Objective Force, the committee hypothesized four compelling examples of likely UGV systems (described in Chapter 2) consistent with the FCS mission-needs statement (TRADOC, 2001b) and the statement of required operational capabilities for the Objective Force (TRADOC, 2001a). These examples were essential to provide points of reference for the application of standard Army criteria for technology readiness levels.
REPORT ORGANIZATION
This report documents the findings and recommendations of the study. It provides specific technology development objectives and a science and technology (S&T) roadmap to guide the Army as it includes relevant UGV technologies in its Objective Force systems. The report is organized in chapters as follows.
Chapter 1 (Introduction) provides background information and the statement of task for the study. Chapter 2 (Operational and Technical Requirements) summarizes documented and undocumented requirements for UGV technologies and provides examples. Chapter 3 (Review of Current UGV Efforts) describes the various programs and demonstrations that comprise the Army’s overall UGV development program and other important UGV development activities. Chapter 4 (Autonomous Behavior Technologies) summarizes the state of the art in core autonomous behavior technology areas and provides technology readiness level criteria and estimates for each area. Chapter 5 (Supporting Technologies) summarizes the state of the art in supporting technology areas essential to UGV systems with technology readiness level (TRL) estimates. Chapter 6 (Technology Integration) describes system-level considerations important to successful UGV implementation in the FCS. Chapter 7 (Roadmaps to the Future) summarizes capability gaps for example systems and provides technology roadmaps based on the TRL estimates, both to achieve the technologies required for systems similar to the examples and to provide a basis for future Army S&T planning. Finally, Chapter 8 (Findings and Recommendations) explains the study findings and recommendations.




