
The Challenges of Landing on Mars
TOMMASO P. RIVELLINI
Jet Propulsion Laboratory
California Institute of Technology
Pasadena, California
People have been fascinated with the idea of exploring Mars since the very beginning of the space age. Largely because of the belief that some form of life may have existed there at one time, surface exploration has been the ultimate ambition of this exploration. Unfortunately, engineers and scientists discovered early on that landing a spacecraft on the surface of Mars would be one of the most difficult and treacherous challenges of robotic space exploration.
Upon arrival at Mars, a spacecraft is traveling at velocities of 4 to 7 kilometers per second (km/s). For a lander to deliver its payload to the surface, 100 percent of this kinetic energy must be safely removed. Fortunately, Mars has an atmosphere substantial enough for the combination of a high-drag heat shield and a parachute to remove 99 percent and 0.98 percent respectively of the kinetic energy. Unfortunately, the Martian atmosphere is not substantial enough to bring a lander to a safe touchdown. This means that an additional landing system is necessary to remove the remaining kinetic energy.
On previous successful missions, the landing system consisted of two major elements, a propulsion subsystem to remove an additional 0.002 percent (~50 to 100 meters per second [m/s]) of the original kinetic energy and a dedicated touchdown system. The first-generation Mars landers used legs to accomplish touchdown. The second generation of touchdown systems used air bags to mitigate the last few meters per second of residual velocity. The National Aeronautics and Space Administration (NASA) is currently developing a third-generation landing system in an effort to reduce cost, mass, and risk while
simultaneously improving performance as measured by payload fraction to the surface and the roughness of accessible terrain.
LEGGED LANDING SYSTEMS
The legs of the 1976 Viking mission lander represent the first-generation landing system technology (Pohlen et al., 1977). Basic landing-leg technology was developed for the lunar Surveyor and Apollo programs in the early 1960s. In conjunction with a variable-thrust liquid propulsion system and a closed-loop guidance and control system, legs represented an elegant solution to the touchdown problem. They are simple, reliable mechanisms that can be added to an integrated structure that houses the scientific and engineering subsystems for a typical surface mission (Figure 1).
The first challenge for a legged system is to enable the lander to touch down safely in regions with rocks. For this the legs must either be long enough to raise the belly of the lander above the rocks, or the belly of the lander must be made strong enough to withstand contact with the rocks. Neither solution is attractive. Either the lander becomes top heavy and incapable of landing on sloped terrain or a significant amount of structural reinforcement must be carried along for the remote chance that the lander will directly strike a rock. The decreased stability because of the high center of mass is exacerbated if a mission carries a large
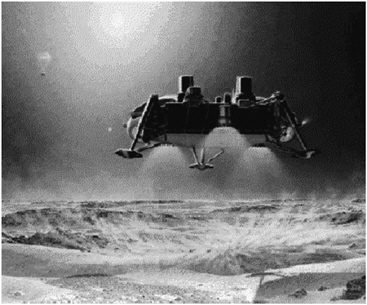
FIGURE 1 First-generation landing system used on the Viking lander, which landed on Mars in 1976.
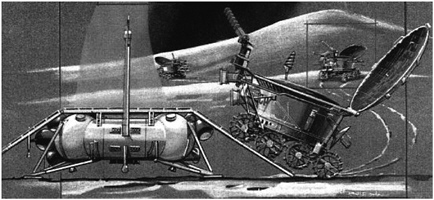
FIGURE 2 Lunokhod Soviet lunar rover leaving the legged lander that delivered it to the surface.
rover to the surface. Because of the rover’s configurational requirements, it is typically placed on top of the lander. The Soviet Lunokhod lunar landers (Figure 2) are an excellent example of this type of configuration.
A second major challenge of the legged-landing architecture is ensuring safe engine cutoff. To prevent the guidance and control system from inadvertently destabilizing the lander during touchdown, contact sensors have been used to shut down the propulsion system at the moment of first contact. On sloped terrain, this causes the lander to free fall the remaining distance, which can significantly increase the total kinetic energy present at touchdown and, in turn, decrease landing stability and increase mission risk. Implementation and testing of fault protection for engine cutoff logic has been, and continues to be, a difficult problem.
The first in-flight problem associated with engine shut off occurred on the lunar Surveyor lander mission when the propulsion system failed to shut off at touchdown, resulting in a significant amount of postimpact hopping. Fortunately, the terrain was benign, and the problem was not catastrophic. The second in-flight problem occurred on the Mars 98 lander mission when the engines were inadvertently shut off prematurely because of a spurious contact signal generated by the landing gear during its initial deployment. This problem resulted in a catastrophic loss of the vehicle. As a result, the Apollo missions all reverted to a man in the loop to perform engine shut off.
A third major challenge with a legged landing system for missions with rovers is rover egress. Once the lander has come to rest on the surface, the rover must be brought to the surface. For legged landers, a ramped egress system is the most logical configuration. Because rovers are bidirectional, the most viable arrangement has been considered two ramps, one at the front and one at the rear of the lander. The Soviet Lunokhod missions landed in relatively benign terrain,
and in all cases, both ramps were able to provide safe paths for the rover. In the Mars Pathfinder mission, one of the two ramps was not able to provide a safe egress path for the Sojourner rover, but the second ramp did provide safe egress. For vehicles designed to explore a larger fraction of the Martian surface and, therefore, land in more diverse terrain, combinations of slopes and rocks could conceivably obstruct or render useless the two primary egress paths.
AIR-BAG LANDING SYSTEMS
The second-generation landing system was developed for the Mars Pathfinder mission and subsequently improved upon for the Mars Exploration Rover (MER) missions (Figure 3). These second-generation systems have a combination of fixed-thrust solid rocket motors and air bags to perform the touchdown task. The solid rocket motors, which are ignited two to three seconds prior to impacting the surface, slow the lander down to a stop 10 meters above the surface, from an initial velocity of approximately 120 meters/second. The lander is then cut away from the over-slung rockets and free falls for the remaining distance.
The air-bag system, which was developed to reduce cost and increase landing robustness, is designed to provide omnidirectional protection of the payload by bouncing over rocks and other surface hazards. Because the system can also

FIGURE 3 Second-generation landing system used on the Mars Pathfinder and MER landers.
right itself from any orientation, the challenge of stability during landing has been completely eliminated. Because the lander comes to rest prior to righting itself, the challenge of rock strikes has been reduced to strikes associated with the righting maneuver, which are significantly more benign. The challenge of thrust termination, in this case cutting the lander away from the rockets, remains but has been decoupled from the problem of landing stability. The problems of rover egress were addressed systematically on the MER missions; a triple ramp-like system provided egress paths in any direction, 360 degrees around the lander.
Although the air-bag landing system has addressed some of the challenges and limitations of legged landers, it has also introduced some challenges of its own. Horizontal velocity control using solid rockets and air-bag testing were significant challenges for both the Mars Pathfinder and MER missions.
THE SKY-CRANE LANDING SYSTEM
As Mars surface explorations mature, roving is becoming more important in the proposed mission architectures. The MER missions demonstrated the value of a fully functional rover not reliant on the lander to complete its surface mission. In the 2009 Mars Science Laboratory (MSL) and other future missions, the rover’s capabilities and longevity will be extended. Future missions are also being designed to access larger areas of the planet and, therefore, will require more robust landing systems that are tolerant to slope and rock combinations that were previously considered too hazardous to land or drive on. The third-generation landing system, the sky-crane landing system (SLS), currently being developed for the MSL mission, will directly address all of the major challenges presented by the first- and second-generation landing systems. It will also eliminate the problem of rover egress.
SLS eliminates the dedicated touchdown system and lands the fully deployed rover directly on the surface of Mars, wheels first. This is possible because the rover is no longer placed on top of the lander. In the SLS, the propulsion module is above the rover, so the rover can be lowered on a bridle, similar to the way a cargo helicopter delivers underslung payloads (Figure 4).
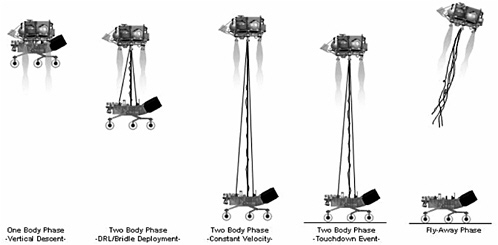
The landing sequence for future missions will be similar to the Viking mission, except for the last several seconds when the sky-crane maneuver is performed (Figure 5). After separating from the parachute, the SLS follows a Viking-lander-like propulsive descent profile in a one-body mode from 1,000 meters above the surface down to approximately 35 meters above the surface. During this time, a throttleable liquid-propulsion system coupled with an active guidance and control system controls the velocity and position of the vehicle. At 35 meters, the sky-crane landing maneuver is initiated, and the rover is separated from the propulsion module. The rover is lowered several meters as the entire system continues to descend. The two-body system then descends the final few meters to set the rover onto the surface and cut it away from the propulsion
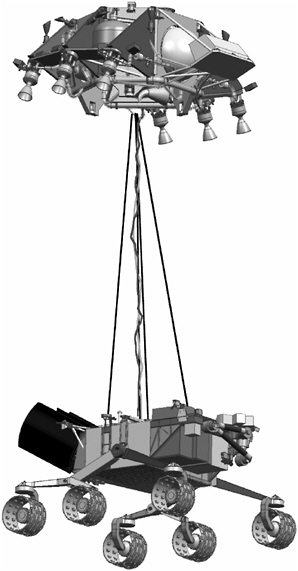
FIGURE 4 Sky-crane landing system shown with the rover already deployed.
module. The propulsion module then performs an autonomous fly-away maneuver and lands 500 to 1,000 meters away.
The central feature of the SLS architecture is that the propulsion hardware and terrain sensors are placed high above the rover during touchdown. As a result, their operation is uninterrupted during the entire landing sequence. One important result of this feature is that the velocity control of the whole system is improved, and, therefore, the rover touches down at lower velocity. Thus, there
is no last-meter free fall associated with engine cutoff, and, because dust kick-up is minimal, the radar antennas can continue to operate even while the rover is being set down on the surface.
The lower impact velocity has two effects. First, the touchdown velocities can now be reliably brought down to the levels the rover has already been designed for so it can traverse the Martian surface. Second, the low velocity, coupled with the presence of bridles until the rover’s full weight has been transferred to the surface, results in much more stability during landing.
Because the rover does not have to be protected from the impact energy at landing and because there is no need to augment stability at landing, there is no longer a need for a dedicated touchdown system. This, in turn, eliminates the need for a dedicated egress system. The SLS takes advantage of the fact that the rover’s mobility system is inherently designed to interact with rough, sloping natural terrain. Rovers are designed to have high ground clearance, high static stability, reinforced belly pans, and passive terrain adaptability/conformability. These are all features of an ideal touchdown system.
TOUCHDOWN SENSING
Touchdown sensing can be done in several ways. The simplest and most robust way is to use a logic routine that monitors the commanded up-force generated by the guidance and control computer. The landing sequence is specifically designed to provide a constant descent velocity of approximately 0.75 m/s until touchdown has been declared. Prior to surface contact, the commanded up-force is equal to the mass of the rover plus the mass of the descent stage (which are roughly equal) times the gravity of Mars. During the touchdown event, the commanded up-force fluctuates depending on the specific geometry of the terrain.
Once the weight of the rover has been fully transferred to the surface of Mars, the commanded up-force takes on a new steady-state value equal to the mass of the descent stage times the gravity of Mars, approximately one-half of its pretouchdown magnitude. The system declares touchdown after the new lower commanded up-force has lasted for at least 1.5 seconds. This approach provides an unambiguous touchdown signature without the use of dedicated sensors.
The fly-away phase of the landing sequence is initiated when touchdown has been declared. During the fly-away phase, separation of the rover is accomplished by the pyrotechnic cutting of the bridle and umbilical lines connecting the rover and descent stage. The descent stage then uses its onboard computer to guide the propulsion module up and away from the rover and land it several hundred meters away.
CONCLUSION
As Mars explorers have learned the hard way, it’s not typically the fall that kills you, it’s the landing. Landing technology has matured significantly in the 40 years since NASA began exploring extraterrestrial surfaces. Each generation of landing technology has attempted to resolve the challenges posed by the previous generation. The SLS represents the latest stage in that evolution.
ACKNOWLEDGMENT
The research described in this paper was carried out at the Jet Propulsion Laboratory of the California Institute of Technology under a contract with the National Aeronautics and Space Administration.
REFERENCE
Pohlen, J., B. Maytum, I. Ramsey, and U.J. Blanchard. 1977. The Evolution of the Viking Landing Gear. JPL Technical Memorandum 33-777. Pasadena, Calif.: Jet Propulsion Laboratory.










