
Sensing Controls for Space-based Planet Finding
JONATHAN T. BLACK
Virginia Tech
Detection and characterization of Earth “twins,” defined as Earth-sized planets with Earth’s geometric albedo of 0.2 in the habitable zone, are the most challenging of the space-based planet-finding missions. Proposed designs to conduct the search for such exoplanets include direct imaging missions that require formation flying of starshades dozens of meters in diameter at distances of 25,000–50,000 km. Position sensing and control under these conditions are substantially more challenging than those involved in orbital rendezvous and docking.
This paper presents the cutting edge in sensing controls for formation flying and satellite proximity operations with a focus on enabling autonomy for small satellites, and discusses current challenges and limitations on advances that are required to apply those technologies to space-based planet-finding missions, recent work in the field, and long-term challenges.
BACKGROUND
NASA recently commissioned two studies to produce exoplanet direct imaging design reference missions (DRMs), one based on a coronagraph observatory (NASA 2015b) and the other on a free-flying starshade dozens of meters in diameter with a telescope up to 4 m in diameter called Exo-S (NASA 2015a). The Exo-S DRMs were based on the Kepler observatory and leveraged satellite technologies with extensive flight heritage; a graphical overview is shown in Figure 1.
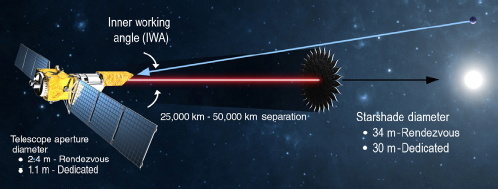
FIGURE 1 Exo-S mission overviews for Rendezvous Mission, in which the starshade works with the Wide-Field Infrared Survey Telescope (WFIRST) Observatory, and Dedicated Mission, in which the starshade is colaunched with a dedicated small observatory. Image courtesy NASA/JPL-Caltech (NASA 2015a).
FORMATION FLYING
Direct imaging requires laterally aligning the telescope to within 1 m of the starshade–star axis, with a separation of 25,000–50,000 km between the starshade and the observatory (Figure 1). While this submeter position control is routine in orbital rendezvous and docking, sensing in this case is altogether more challenging as positions must be sensed three to five times more finely than the control requirement. The lateral offset of the starshade must therefore be sensed to 30 cm at maximum separation, yielding a bearing measurement precision of 6 nrad (nanoradians) (1.25 milliarcseconds, mas) during imaging (NASA 2015a). The sensing requirements during all phases of observatory operation are shown in Figures 2 and 3.
SMALL SATELLITE PROXIMITY OPERATIONS AND FORMATION FLYING
Automated proximity operations (proxops) have enabled new mission capabilities and enhanced space situational awareness, but additional technology development was needed for exoplanet direct imaging. Several successful flight missions, including the Orbital Express (Defense Advanced Research Projects Agency)1 and the SpaceX Dragon capsule docking with the International Space Station, involve active external illumination and sensing (Ogilvie et al. 2008),
_____________
1 Archived information about the 2007 Orbital Express is available from the DARPA Tactical Technology Office at http://archive.darpa.mil/orbitalexpress/index.html.
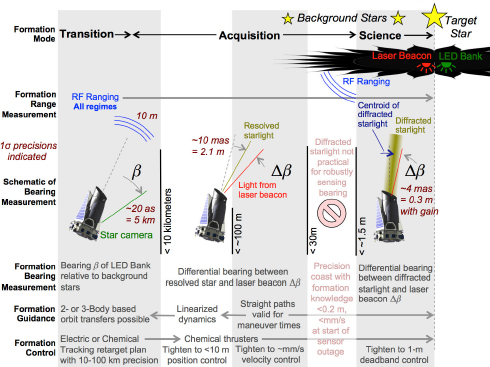
FIGURE 2 Formation sensing, guidance, and control by formation mode. β =bearing angle; RF = radio frequency. Image courtesy NASA/JPL-Caltech (NASA 2015a, Figure 6.3-2).
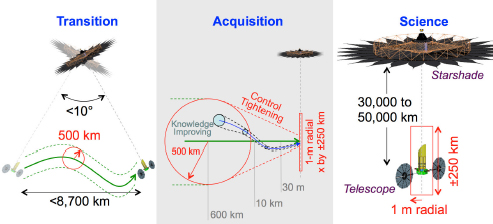
FIGURE 3 Formation flying modes and requirements. Image courtesy NASA/JPL-Caltech (NASA 2015a, Figure 6.3-1).
which will not be possible in the planned deep space orbits of the exoplanet direct imaging observatories.
As an alternative, computer vision–based sensing methods require only a camera and CPU and no a priori knowledge of the target. Star tracker–like subsystems on smaller spacecraft can also be used. Research so far in this field has developed a monocular simultaneous localization and mapping (SLAM) method for implementation on a proxops simulator.
The use of monocular SLAM produces a 3D map from relative motion while tracking the camera pose (location and orientation). Initial results of the space-specific monocular SLAM method show depth and pose estimates of targets, are robust to the dynamic backgrounds and highly reflective surfaces in the space environment, have an average error on the order of 0.31° (0.27° standard deviation, 0.46° RMS), and run in near real time of 11.8 frames per second. It is important to reiterate that no a priori target knowledge is required to generate 3D models. The results, samples of which are shown in Figures 4 and 5, pave the way for automated proxops on platforms as small as a CubeSat.
Autonomous state estimation and control, which mathematically represent physical quantities such as position and velocity, are also key technology enablers of the precision formation flying operations required for exoplanet direct imaging.
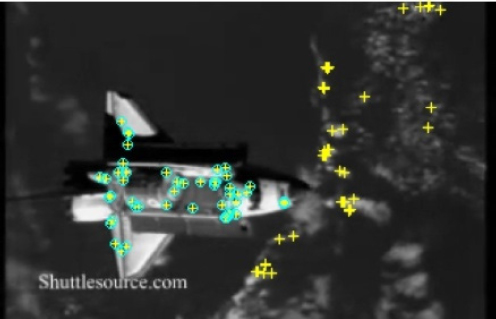
FIGURE 4 Frame from processed shuttle video showing identified feature points. Circles around crosses denote features detected on the shuttle. Crosses without circles denote features detected on the background (Kelly 2015).
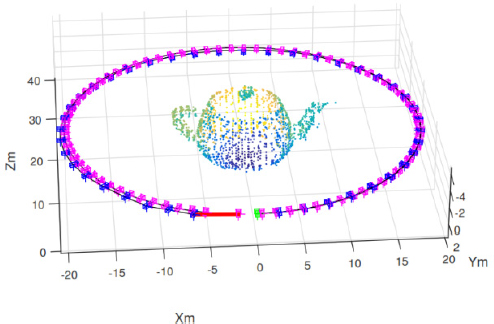
FIGURE 5 Sample monocular simultaneous localization and mapping (SLAM) results showing actual (blue boxes in ring) and estimated (pink boxes) camera position (3D location) and pose (direction the camera is pointing). Figure available in color at http://www.nap.edu/catalog/21825. SOURCE: Kelly (2015).
Work in this area provides a unique approach to autonomous fuel/time trajectory optimization for relative reconfiguration of two objects in perturbed elliptical orbits.
The relative motion model for the deputy satellite with respect to the chief2 is well approximated using a fully nonlinear state transition matrix. Control is applied in the in-track and cross-track directions, making this system underactuated but reachable for any formation flying orbit. The system is discretized using a zero-order hold on the input and the control signals are computed using a linear program, resulting in a bang-off-bang3 control profile. A balance between the time of flight and the required fuel is analyzed using a genetic algorithm. Combining the new estimation with the tracking control produces a novel, robust, and computationally light (autonomous) optimal terminal guidance capability, a sample of which is shown in Figure 6.
_____________
2 Deputy refers to the maneuvering satellite over which there is control. Chief refers to the nonmaneuvering satellite being inspected.
3 No throttle is available, and the thruster is either on or off.
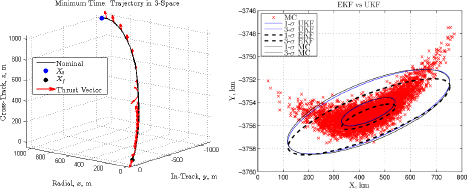
FIGURE 6 Control inputs for tracking minimum time trajectory (left) and high-order state estimation (right). EKF = extended Kalman filter; MC = Monte Carlo; UKF = unscented Kalman filter; X0 = initial position; X1 = final position.
FUTURE CHALLENGES AND DIRECTIONS
The sensing controls required to enable the precision formation flying of starshades and observatories tens of thousands of kilometers apart in deep space are an extreme engineering challenge. The current state-of-the-art technology development in formation flying and spacecraft autonomy for small satellites needs to be adapted for exoplanet direct imaging missions to ensure mission success. The sensing task will likely be coupled to the autonomous orbital and attitude control systems discussed here, and may also require advances in machine learning and cognition.
ACKNOWLEDGMENTS
The author thanks Andrew Rogers of Virginia Tech.
REFERENCES
Kelly S. 2015. A monocular SLAM method to estimate relative pose during satellite proximity operations. MS thesis (March). Available at http://www.dtic.mil/docs/citations/ADA616162.
NASA [National Aeronautics and Space Administration]. 2015a. Exo-S: Starshade Probe-Class Exoplanet Direct Imaging Mission Concept—Final Report (CL#15-1155). ExoPlanet Exploration Program, Astronomy, Physics, and Space Technology Directorate, Jet Propulsion Laboratory, March. Pasadena. Available at http://exep.jpl.nasa.gov/stdt/.
NASA. 2015b. Exo-C: Imaging Nearby Worlds—Final Report (CL#15-1197). Science and Technology Definition Team, ExoPlanet Exploration Program, Astronomy, Physics, and Space Technology Directorate, Jet Propulsion Laboratory, March. Pasadena. Available at http://exep.jpl.nasa.gov/stdt/.
Ogilvie A, Allport J, Hannah M, Lymer J. 2008. Autonomous robotic operations for on-orbit satellite servicing. Proceedings of SPIE 6958:09–12.





