
CHAPTER FIVE
S2S Forecast Systems: Capabilities, Gaps, and Potential
Chapter 4 covered the processes of discovering, characterizing, and understanding the theoretical limits of various sources of predictability in the weather-climate system. After those sources are identified and begin to be understood, they can be incorporated into Earth system models (ESMs) for subseasonal to seasonal (S2S) prediction. This chapter examines the features of such S2S prediction systems and makes recommendations about advancing each component in order to produce more skillful S2S forecasts. To begin, the chapter provides an overview of the functioning architecture of a typical S2S system.
The production of probabilistic forecasts on S2S timescales is similar in many ways to contemporary numerical weather prediction: observations of the atmosphere, ocean, cryosphere, and land provide initial conditions for computing the evolution of these Earth system components forward in time. However, there are some important differences between S2S and shorter-term weather and ocean prediction. First, chaotic aspects of the Earth system mandate averaging S2S predictions over long enough periods, or over a large enough set of realizations, that stable forecast statistics are produced for each place and lead time. Longer and/or larger ensemble averages are generally needed for longer lead times. A second difference is that a set of similar forecasts—made in retrospect for 20 or more years with the same forecast system—is typically compared with verification observations to calibrate the forecasts, with the aim of correcting the predicted probability distribution on the basis of how the model reproduces past conditions. This is crucial and standard practice at least at seasonal timescales (where the desired signals may be small compared to the corrections); similar methods are beginning to spread to extended range Numerical Weather Prediction (NWP). Finally, the longer-timescale predictions typically include interactive Earth system components (e.g., interactive ocean and sea ice), because the evolutions of these components have important impacts on the atmosphere or provide valuable forecasts in their own right. For weather and climate, the distinctions among prediction methods at various time ranges are beginning to diminish as even short- to medium-range weather forecast models move to encompass interactive ocean and sea ice components.
The basic architecture of S2S prediction systems is depicted in Figure 5.1, which also provides an organizational structure for the content in this chapter. Coupled ESMs lie
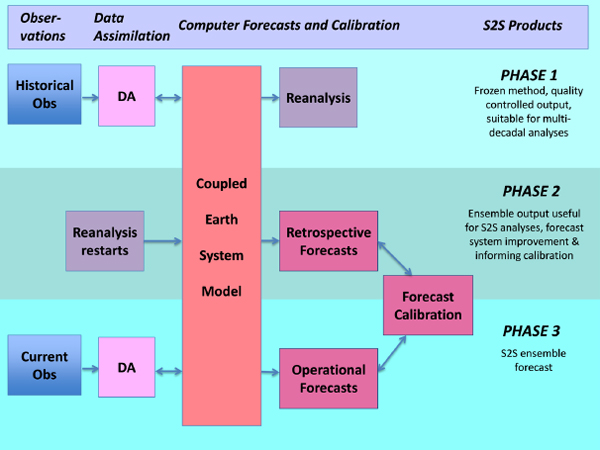
at the core of most of these systems. The ESM itself—a system of partial differential equations that describe the evolution of the components of the Earth system and the interactions between them—projects state variables forward in time. The separate components—atmosphere, ocean, land, sea ice—are discretized on a computational grid with specific spatial and temporal resolutions. The components are linked together at the interfaces via a coupler, which transfers information, such as heat and momentum fluxes. Meanwhile, the coupler also transfers model errors from one component to another, making the model error growth a coupled process as well. Because of the finite resolution in space and time, many processes in the models remain unresolved and require parameterizations of their effects on the components that are resolved. The committee notes that, for certain S2S predictions, integrating a subset of an ESM can be sufficient to achieve useful predictive skill. For example, some ocean and ice forecasts can be issued on S2S timescales with prescribed atmospheric surface conditions without two-way coupling with atmospheric models. When appropriate, such scale- or process-separation can be exploited for more efficient forecasting.
ESMs are initialized by tens of millions of observations of the atmosphere, ocean, land surface, and cryosphere. In order to be integrated into the model state space, these observations must first be transformed via data assimilation, a process that attempts to optimally combine observations with a short-term (usually less than a day) model forecast using the error characteristics of each observation type. Thus the goal of data assimilation is to produce a state estimate (i.e., initial condition) that is in an appropriate and dynamically consistent format for subsequent forecast computation. Often historical observations over multiple decades are also assimilated with a frozen ESM and assimilation procedure to produce a reanalysis, suitable for investigating multiscale variability in the Earth system with the same ESM and as consistent of observation data streams as possible. Running the ESM forward from an initial condition, with no further data assimilation, produces a forecast. The numerical output from an ESM forecast usually consists of an ensemble of 10 or more members, each containing some 100 or more physical variables on spatial grids at intervals of hours (or much shorter for specific applications). The ensemble is created by running multiple realizations, perturbing the initial conditions and/or the model formulation, to produce a distribution of results that are intended to sample uncertainties in the estimate of the initial state, external forcing, and model parameterizations.
For these outputs to be transformed into S2S forecast products, they first must be calibrated and verified by comparing forecasts to the subsequent observations. To obtain a large enough data set to be statistically meaningful and avoid over-fitting,
comprehensive retrospective forecasts or hindcasts1 are performed in which the forecast system is exercised over a historical period of some 10 to 30 years. In this process, the reanalysis in Figure 5.1 provides initial conditions, the retrospective forecasts are computed with the ESM, and then the forecasts are compared to a reanalysis or some other verification data set.
After any part of the forecast system is changed, the retrospective forecasts must be re-created to be consistent with the modifications. Today, some forecast centers are producing them as part of the model forecast process itself. This permits the centers to take advantage of model improvements with frequent updates. Thus some retrospective forecasts are static and some are produced “on the fly” along with the forecasts themselves. Such on-the-fly retrospective forecasts have been employed in atmospheric models and ESMs (e.g., MacLachlan et al., 2015; Vitart, 2013) and also real-time ocean forecasting (e.g., Lermusiaux et al., 2011; Ramp et al., 2009; Robinson et al., 2002). Either way, calibrations derived from the retrospective forecasts are applied to improve new forecasts. For example, if August temperature in a specific geographic region of the historical forecasts tends to be biased, then the mean temperature of the new forecasts is adjusted accordingly. Similarly, if the probability distribution of the retrospective forecast is too narrow, then the probability can be made wider in subsequent operational forecasts.
The rest of this chapter examines in more detail the pieces of S2S prediction systems that were described in brief above. Aspects of S2S forecast systems—routine observations, data assimilation, models, and the calibration and production of forecast products—are covered in separate chapter sections. For each of these sections, the committee has identified findings and developed a set of research recommendations. The implementation of these recommendations will be critical to advancing S2S forecast skill and to better meeting the needs of users as highlighted in Chapter 3.
ROUTINE OBSERVATIONS AND THEIR USE
Observations are a fundamental building block of any prediction system. They provide a basis for understanding the Earth system, guide model development, enable the initialization of forecast systems, and provide the foundation for evaluating model fidelity and quantifying prediction skill. An expansive network of in situ and remotely sensed observing systems is used for S2S forecasting. However, maintaining this network to ensure no degradation of present-day nascent S2S forecast skill represents
___________________
1 As noted in Chapter 1, other commonly used terms for retrospective forecasts are “reforecast” and “forecast history.” These terms are interchangeable.
a significant challenge in and of itself. Improved utilization of other existing observations, along with new observations to increase geographic coverage, spatial and temporal resolution, and the breadth of routinely measured Earth system variables, are critical for further advancing S2S model development and operational S2S forecasts.
This section describes the current state of observations to support S2S forecast systems and highlights important gaps and vulnerabilities in the coverage of observational networks. The focus is on observations for operational model initialization, calibration, evaluation, and routine monitoring, although these types of observations are also generally useful for studies on sources of predictability (covered in Chapter 4). Generally the most basic quantities are needed (e.g., temperature, wind speeds), with continuous temporal and broad spatial coverage, and at spatial and temporal resolutions that are relevant for S2S processes. Because S2S forecast systems are often driven by observations of anomalies from a climatological mean, overlapping measurements between successive generations of observing systems are particularly valuable so that changing observation system biases are not aliased into estimated anomalies in the state of the real world. Observations of the atmosphere are as important for S2S prediction as they are with NWP. However, observations of the ocean, land, and cryosphere represent additional critical needs for building, calibrating, initializing, and evaluating the coupled ESMs that will be used to generate S2S forecasts in the next decade. This is because, although the ocean, land surface, and cryosphere contain important sources of Earth system predictability on S2S timescales, observations within these components are neither as numerous nor as distributed as observations of the atmosphere.
Recommendations and priorities for observations to support S2S forecast systems are presented at the end of the section. Field observations for process studies designed to develop and improve model processes and parameterizations and reduce systematic biases are covered in more detail in the modeling section of this chapter.
Observations of the Atmosphere
The current observing system for the atmosphere is among the most comprehensive of all the components of the Earth system. Yet, observations of the atmosphere need to be maintained or advanced for continued improvement to S2S prediction systems. The current atmospheric observing system includes in situ measurements of moisture, temperature, pressure, and wind from radiosondes, aircraft (e.g., Aircraft Meteorological Data Relay [AMDAR] and Tropospheric Airborne Meteorological Data Reporting [TAMDAR]), and sensors at the Earth surface (e.g., land, moorings, and ship). Satellites provide additional information on ocean surface winds (covered in more
detail in the ocean observation section), clouds and precipitation, radiation, surface temperature, winds (from feature tracking), and vertical profiles of temperature and moisture. These measurements come from a range of sensors including microwave radars, radiometers and sounders, hyperspectral infrared sounders, visible and infrared imagers, scatterometers, and global positioning system (GPS) radio occultation.
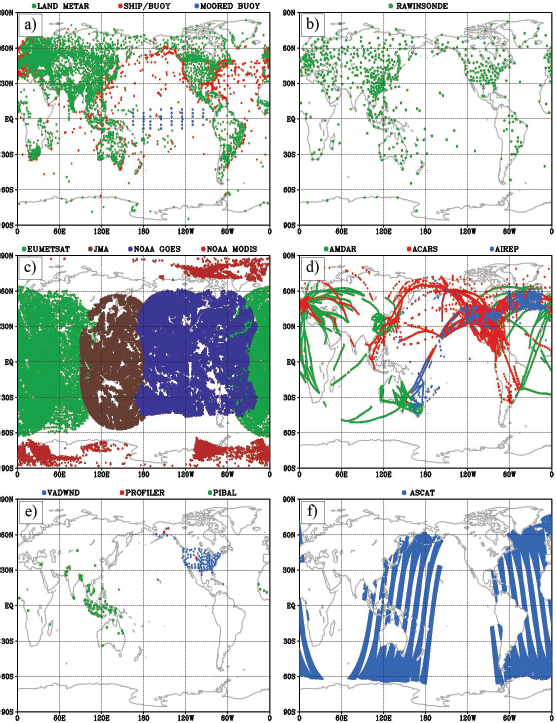
The world radiosonde network is extensive (Figure 5.2) and has been a main source of three-dimensional input to atmospheric models. These data have historically been supplemented by measurements from aircraft-based sensors. However, the radiosonde network lacks coverage over the ocean, in the tropics, in uninhabitable areas (especially polar regions), and in less developed countries. Measurements from aircraft are mostly limited to flight level except near airports. These gaps in spatial coverage are a particular concern for S2S prediction because they span regions through which signals from phenomena over the tropical ocean (e.g., the Madden–Julian oscillation [MJO] and El Niño-Southern Oscillation [ENSO]) are teleconnected and hence propagate poleward and towards land.
There is some potential for the existing radiosonde network to be further exploited to support S2S applications for real-time assimilation as well as in model improvement studies. Radiosondes can measure profiles at a vertical resolution of as little as 5 meters (Hamilton and Vincent, 1995), but at present operational centers routinely receive only data at the mandatory pressure levels (with resolution at best of about 700 m). High-altitude and finer-resolution vertical profiles could be used to help resolve troposphere-stratosphere interaction, cumulus convection, and mesoscale atmospheric organization—processes that are particularly important for S2S predictions (see Chapter 4 and Chapter 5, models section). Implementing this type of change has remained challenging because of the extensive international coordination and data management it requires.
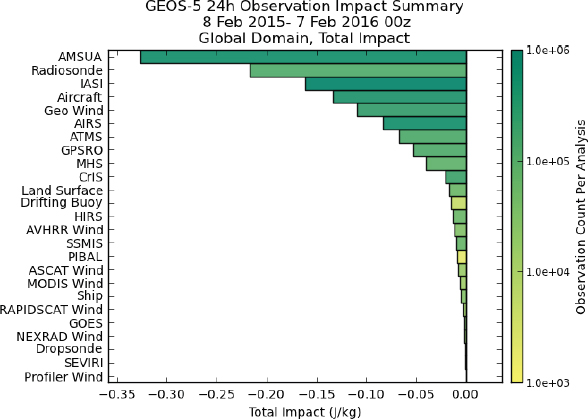
Gaps in the coverage of radiosonde observations, along with the recent deterioration of the radiosonde network (NRC, 2000), have led to increasing reliance on satellite data for atmospheric monitoring and modeling. Today, the Advanced Microwave Sounding Unit (AMSU) is actually the most important observing system for shorter-term weather predictions in a current version of the National Aeronautics and Space Administration (NASA GEOS-5) global NWP model, followed closely by aircraft, radiosondes, and hyperspectral infrared sounders such as the Infrared Atmospheric Sounding Interferometer (IASI) and the Atmospheric Infrared Sounder (AIRS) (Figure 5.3). This finding is generally representative of other NWP systems such as the National Centers for Environmental Protection (NCEP; Ota et al., 2013) and the European Center for Medium range Weather Forecasts (ECMWF; Cardinali, 2009).
Given the uncertainties about the future of the radiosonde network and gaps in its coverage, continued investment into satellite-based atmospheric observations is important for moving forward. The development of platforms and algorithms for the retrieval of key variables—including vertical profiles of temperature, humidity, and wind—at resolutions that can capture the development and evolution of mesoscale systems and more detailed information in the boundary layer are particularly important. Advancing S2S predictions will also hinge on the ability to perform DA in cloudy and precipitating regions (see section on DA). Such capability will in turn rely on a host of routine, global high-resolution observations of radiation, clouds, and precipitation. On a slightly longer time horizon, developing such observations and the ability to assimilate them will also be important for fully implementing cloud-permitting
forecast models (see section on models). Similarly, as models progress to better represent aerosol-cloud interactions—especially for regions where radiative forcing from aerosols (e.g., polluted cities) is substantial—it will become essential to expand routine in situ (e.g., Aerosol Robotic Network [AeroNet] and Micro-Pulse Lidar Network [MPLNet]) and satellite observations of aerosols and to have the capability to exploit these observations via data assimilation.
The United States is a leading contributor to the operational global satellite data coverage used in weather and climate prediction. U.S. federal agencies have been planning for replacements to aging polar orbiter and geostationary satellites, some of which are near or past their expected lifetime. However, the replacement programs have been beset with delays and cost overruns, leading to the potential for a gap in coverage. In particular, a gap in microwave sounder coverage from polar orbiting satellites could lead to significant degradations in atmospheric monitoring and prediction at weather and S2S timescales, a scenario the U.S. Government Accountability Office identified as high risk in a 2015 report.2
Two new satellite missions could lead to important improvements in global observations of three-dimensional winds and precipitation—two of the major gaps in the atmospheric observing network discussed above. The Atmospheric Dynamics (ADM-Aeolus) by the European Space Agency, set to launch in 2016, plans to provide clear-sky or above-cloud vertical profiles of wind derived from a space-based lidar.3 A different joint satellite mission between NASA and the Japan Aerospace Exploration Agency (JAXA), the Global Precipitation Mission (GPM; Hou et al., 2014), was recently launched to provide high temporal resolution observations of rain and snow, expanding significantly upon the measurement portfolio and geographic coverage of its predecessor, the Tropical Rainfall Measuring Mission (TRMM). In particular, GPM could enhance capability to monitor and predict extreme events such as tropical cyclones, floods, and droughts and may provide global measurements of precipitation microphysics and storm structure, enhancing the ability to design and validate the representation of precipitation in next generation, higher resolution ESMs. Such measurements could also improve the representation and initialization of soil moisture within the land surface component of current S2S prediction systems (see below).
Newer, nonconventional satellite technologies have the potential to improve the atmospheric observing network. GPS radio occultation observations, for example, have the potential to provide highly accurate, unbiased retrievals of temperature and moisture, but at a much lower cost than typical satellite missions. Atmospheric motion
___________________
2http://www.gao.gov/products/GAO-15-290, accessed January 27, 2016.
3https://directory.eoportal.org/web/eoportal/satellite-missions/a/adm-aeolus, accessed January 27, 2016.
vectors (AMVs)—winds derived by following features from geostationary satellites and from polar orbiting satellites near poles—have proven to be an important component of the observing system given the lack of wind information from other observations, particularly in the tropics, over oceans, and in polar areas. However, issues remain regarding the assignment of vertical location for these observations. On the very cusp of development are small, capable sensors that can be deployed on less expensive small satellites (e.g.,“cubesats”), which in turn can be implemented into multi-satellite constellations providing rapid revisits and a low-cost approach for some operational observation needs (Ruf et al., 2013).
Finding 5.1: The current atmospheric observing system is relatively robust, but components of the network are in danger of deteriorating and/or are underutilized and spatial coverage is still poor in remote areas such as over the oceans and in polar regions.
Finding 5.2: As S2S prediction systems evolve in complexity and resolution, routine broad-coverage and higher resolution atmospheric observations of thermodynamic profiles, clouds, precipitation, and aerosols will become essential to better characterize convection and troposphere-stratosphere interactions, as well as to enable cloud-permitting models.
Finding 5.3: Space-based satellite observations are likely to be the most efficient way to develop the new atmospheric observations that will be required for S2S predictions, although other cost-effective approaches to obtain the requisite accuracy and coverage are worthy of continued investigation.
Ocean Observations
The ocean is significantly under-observed compared with the atmosphere, despite being a major source of S2S predictability (Cummings, 2011; Robinson, 2006). Sea surface temperature (SST) may be the most important oceanic variable for driving the atmosphere in the coupled system. This is due to the strong dependence of air-sea heat flux, evaporation, and even the stability of the atmospheric boundary layer on SSTs. Accurate initial conditions for SST as well as for ocean currents are not sufficient for predicting the time evolution of SST on S2S timescales because the effective ocean heat capacity on S2S timescales depends strongly on how deeply surface thermal anomalies are mixed by near-surface winds, ocean surface waves, and convective instabilities in the ocean mixed layer. Thus measurements of winds, waves, air-sea fluxes,
and near-surface ocean heat content anomalies and density structure (the latter determines the depths to which near-surface thermal anomalies can be easily mixed) may be just as critical for ocean prediction as SST measurements. Measurements of salinity are also important for constraining SST evolution, because both salinity and temperature determine the ocean’s density structure. There are many places where a layer of relatively fresh water in the top few meters is observed to stabilize an ocean water column that would be unstable if only thermal properties were considered.
Transport of properties by ocean currents and associated eddies as well as vertical mixing driven by sheared ocean velocities also play an important role in the evolution of the coupled system at S2S and longer timescales. For example, re-stratification by finite-amplitude, submesoscale, mixed-layer eddies plays a strong role in the evolution of the coupled system (Fox-Kemper et al., 2011), as does the atmospheric response to oceanic variability in areas of high SST variability (Kirtman et al., 2012). When averaged over timescales of the inertial period and longer, extratropical ocean velocities are well approximated by a geostrophic and Ekman balance, which can be determined from knowledge of the ocean’s sea surface height or bottom pressure anomalies, surface wind stresses, and the ocean’s three-dimensional density structure. Tropical currents tend not to be as well constrained by geostrophy, and tidal flows and rectified tidal effects can be important, especially in coastal areas. Thus direct measurements of ocean velocity (e.g., from moorings with current meters or drifters) or estimates of the surface geostrophic and Ekman components estimated via remote sensing (Lagerloef et al., 1999) and tides are particularly valuable for constraining the state of the ocean in tropical and coastal areas at S2S timescales. Velocity measurements that are available in real time can be directly assimilated into S2S forecast systems, while delayed velocity data (e.g., data that is only available after instrument recovery) play an important role in evaluating the realism of S2S forecast systems. Additional ocean-related observations that may benefit Earth system forecasts at S2S timescales include biogeochemical quantities such as nutrient distributions, oxygen levels, and initial plankton distributions. Used as tracers, these quantities may improve the initialization of the physical aspects of the system, but as the ocean model grows in sophistication to include biogeochemical processes, such quantities will be needed for initialization of these components.
Many of the ocean surface processes described above can be well sampled by remote sensing. Satellite measurements of SST, sea surface height (SSH), and scatterometer-derived surface wind stress are routinely used by ocean prediction systems. However the value of remotely sensed measurements for S2S forecasting depends critically on having enough instruments to provide continuous measurements with adequate temporal and spatial coverage. For example, the quality and reliability of forecasts of
the ocean mesoscale eddy field depend upon the availability of multiple altimeters for coverage and resilience to instrument failures (Jacobs et al., 2014; Le Traon et al., 2003). Beyond the above physical variables, remotely sensed ocean color (i.e., visible wavelength) can be used to constrain biogeochemical ocean model components, which in their simplest use are needed to determine the vertical profile of solar heating in the near surface layer of the ocean (e.g., Murtugudde et al., 2002).
The TOPEX/Poseidon and NASA/CNES/NOAA/EUMETSAT Jason missions4 have provided continuous SSH measurements since 1992. The Jason-3 mission, to be launched in January 2016, and the Copernicus European Program,5 which will deliver Earth data from a dedicated constellation of satellites known as “Sentinels,” will also provide operational SSH measurements into the coming decade. Additional upcoming satellite missions for oceanography and hydrology include the “Surface Water and Ocean Topography” (SWOT) mission—a collaboration between the United States and France.6 With an estimated launch date of 2020, SWOT will continue the TOPEX/Jason record of global ocean altimetry but will also complement it by providing unprecedented global high-resolution elevations for small-scale ocean eddy features and for lakes and rivers over land. SWOT will likely allow for an important improvement in model representations of the ocean’s geostrophic eddy fields and will provide an altogether new resource for estimating surface-water elevations, both of significant value to S2S forecast considerations and applications. However, because SWOT is a research satellite, its 3-year projected mission lifetime is shorter than is desirable for operational use as a part of a well-validated S2S forecasting system. Although there is a foundation for remotely sensed SSH measurements via Jason and the European Sentinel program, there is great concern regarding the continuity of surface wind observations over the ocean. Much of the evolution of the ocean circulation on S2S timescales is driven by wind stress, and scatterometer wind stress measurements are of particular importance for constraining the ocean and atmosphere in remote areas of the ocean with little other observation coverage for wind. Presently, the only U.S. scatterometry asset is RapidScat, a 2-year mission on the International Space Station (ISS). Although this implementation comes with some advantages (namely the orbit allows resolving of the mean diurnal variability of ocean surface winds and can provide cross-calibration of other agency scatterometers such as the European Organisation for the Exploitation of Meteorological Satellites [EUMETSAT] Advanced Scatterometer [ASCAT]), its inclined orbit does not provide global observations. An additional experimental resource for winds will come from NASA’s upcoming Cyclone Global Navigation
___________________
4http://sealevel.jpl.nasa.gov/missions/ostmjason2/, accessed January 27, 2016.
5http://www.copernicus.eu, accessed January 27, 2016.
6http://swot.jpl.nasa.gov/mission/, accessed January 27, 2016.
Satellite System (CYGNSS) mission, composed of a constellation of eight small satellites that use GPS reflections off the surface to estimate wind speed (direction not measured). Although the coverage from this experimental mission will be limited to the tropics, it will provide an additional consideration for future observations of ocean surface wind speed that are likely to be complementary to the broad swath sampling of scatterometers that provide vector wind observations. Despite their potential for improving ocean wind measurements, RapidScat and CYGNSS are experimental missions with very limited lifespans. To advance S2S prediction, it is vital to determine a longer-term, sustainable plan for providing global, continuous satellite measurements of ocean surface winds.
Satellites also estimate ocean surface salinity (i.e., from the Soil Moisture and Ocean Salinity [SMOS]7 and, until recently, Aquarius missions8). The assimilation of such data has already improved some aspects of coupled forecasts (e.g., Hackert et al., 2011, 2014; Tang et al., 2014), but salinity is a challenging measurement to make from space, and further advances are needed. Salinity anomalies on the of order 0.1 psu are dynamically important on S2S timescales (e.g., Guan et al., 2014), but this is near the threshold accuracy of current satellite retrieval capabilities on spatial scales relevant to S2S (cf. Tang et al., 2014).9 However, with a combination of a robust in situ network (e.g., Argo, buoys, see below) and satellite measurements, a highly complementary set of measurements can be provided. In situ data can provide accurate absolute salinity values with the benefit of vertical profile information, and satellites can provide global coverage of (only the) surface salinity with the benefit of spatial gradient information and for measurements in marginal seas (although at a distance of at least one satellite footprint away from the coast; ~50-100km) where drifters/buoys are limited.
Remote sensing has the potential to deliver routine observations of the ocean surface with coverage (space and time) that cannot be matched by current in situ observations. However, as illustrated with salinity above, in situ data will continue to be essential for calibrating remotely sensed ocean observations, and some in situ observations are critical for providing routine measurements of variables that are not well-observed via satellite platforms. Furthermore, because radiation penetrates only a short distance (millimeters to 10s of meters, depending on wavelength) into the ocean, observing the
___________________
7http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/SMOS/ESA_s_water_mission_SMOS, accessed January 27, 2016.
8 The Argentine Space Agency/CONAE’s satellite, hosting NASA’s Aquarius instrument, failed in June 2015, terminating the 4-year record of salinity observations. http://aquarius.nasa.gov/, accessed January 27, 2016.
9 Recent comparisons of satellite to in situ values show root mean square errors on the order of 0.28 to 0.51 psu for SMOS (Reul et al., 2014) and 0.2 to 0.3 psu for Aquarius (Tang et al., 2014), each for monthly timescales and grid averages of ~100km.
three-dimensional ocean fields mentioned above (e.g., subsurface temperature, salinity, and ocean velocities) usually calls for in situ data.
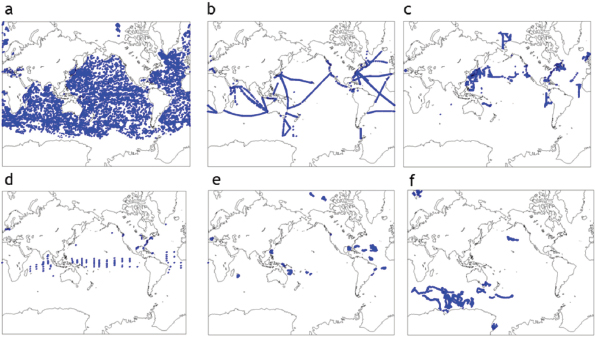
Argo—a global drifting sampling array that began deployments in 1999—provides the best coverage for global, in situ ocean measurements at depth (Riser et al., 2016; Figure 5.4a). Argo has close to 4,000 free-drifting profiling floats that measure temperature, salinity, and dissolved oxygen of the upper 2,000 m of the ocean and transmit the collected measurements in near real-time. The Argo network is quite coarse (roughly one float on a 3°x3° grid, but not uniformly distributed) and does not cover the deep ocean below 2,000 m. However, deep Argo float prototypes with operational ranges down to 4,000 m or 6,000 m, depending on the model, are being tested (G. Johnson; D. Roemmich, personal communication, December 2014). Other prototypes of Argo floats are adding sensors for biogeochemically important quantities such as pH, nitrate, and chlorophyll fluorescence (K. Johnson, personal communication, December 2014) and are being designed to improve their performance in seasonally sea ice covered regions.
Moored buoys also provide critical real-time observations of condition at the ocean surface (Figures 5.4d and 5.2a). Natural modes of variability highlighted in Chapter 4 as important sources of S2S predictability are predominantly tropical and are either fundamentally coupled ocean-atmosphere phenomena (e.g., ENSO), or at least influenced by ocean-atmosphere feedbacks (e.g., MJO). The Tropical Atmosphere Ocean/Triangle Trans-Ocean Buoy Network (TAO/TRITON) moored buoy array in the Pacific, the Prediction and Research Moored Array in the Atlantic (PIRATA), and the Research Moored Array for African-Asian-Australian Monsoon Analysis and Prediction (RAMA) array in the Indian Ocean provide hourly oceanic observations and surface meteorological observations, all in real time, in locations that were selected to fill data gaps in monitoring the variability of the tropical climate system (NRC, 2010a). In particular, the observations from the TAO/TRITON moorings play an important role in the generation of skillful seasonal ENSO forecasts (NRC, 2010b), including the large ongoing 2015-2016 El Niño.
For tropical ocean surface moorings to continue to benefit operational ocean and S2S forecasting, they need to deliver consistent and reliable observations. However, tropical surface moorings are subject to instrument failures due to long-term exposure to a difficult environment, and they are also commonly damaged by fishing activities and vandalism. Regular and sustained maintenance of these moorings is necessary, but limited access to ship-time for missions to refresh moorings has resulted in data losses and thus time series breaks. For example, lack of maintenance during the period from June 2012 through September 2014 severely degraded the TAO array, causing the returned data volume to drop to roughly one-half its historical rate from the 2000s
(Tollefson, 2014). Although the tropical mooring array can be expensive and logistically challenging to maintain, allowing it to decay through neglect is unacceptable for what has proven to be a vital element in delivering skillful and societally valuable ENSO forecasts (NRC, 2010c).
A global array of surface drifters (e.g., Niiler, 2001) provides synergistic information for satellite measurements of SST, salinity, and absolute SSH, but its spatial coverage is coarser than that of Argo (roughly one float on a 5°x5° grid). For example, the Global Drifter Program (GDP10) provides satellite-tracked surface drifting observations of currents, SST, atmospheric pressure, winds, and salinity over the world’s oceans. Other routine in situ measurements are collected and reported back in real time by volunteer observing ships and research vessels and moorings. Sensors on marine mammals also provide important subsurface ocean data, and such sensors are currently one of the few ways to observe the subsurface ocean in polar regions and beneath sea ice (Charrassin et al., 2008; Roquet et al., 2013). Autonomous underwater vehicles (AUVs,
___________________
10http://www.aoml.noaa.gov/phod/goos.php, accessed January 27, 2016.
e.g., gliders or self-propelled vehicles) can also be used to collect routine ocean measurements (see Box 5.1). The range and usage of gliders is increasing, but the range of propelled AUVs is often still too limited. They are however, relatively cost effective and can be outfitted with many sensors and sent into areas not commonly covered by other techniques, making further development of this technology attractive.
Coastal areas represent a significant challenge for satellite observations. Specifically, satellite-based observations of winds and SSH are not yet accurate in coastal regions, where the winds can change rapidly over smaller spatial and temporal scales relative to coarse microwave footprint sizes (~25km). In addition, the side-lobe contamination from the land renders the near-coastal observations unusable. Although the SWOT mission will improve the situation for SSH due to its higher resolution (~2km), coastal winds and surface current observations will need to rely on the high-frequency shore-based radar (such as Coastal ocean dynamics applications radar [CODAR] and WavE RAdar [ WERA]). These radar observations are increasing in availability and are a backbone component of NOAA’s Integrated Ocean Observing System (IOOS), but many more of these data sets are needed globally in order to increase predictability near the coasts. Finally, it is important to maintain the global tidal network together with measurements from submarine cable instruments to ensure accurate tidal prediction. Wave predictions and the associated air-sea interactions also require that the wave buoy network is sustained to ensure availability of wave data.
In summary, although progress continues to be made in advancing in situ and remote sensing measurements of the ocean, including expanding temporal and spatial coverage and capabilities, the ocean continues to be under-observed relative to its importance in the coupled Earth system. Coverage and continuity of existing SST, SSH, and surface wind observations are important to maintain in order to produce S2S forecasts that are skillful. Further advances in observing technology and coverage could have tremendous value for characterizing important S2S ocean processes, improving models, and providing information for forecast initial conditions. Effective integration of the increasing ocean observations and platforms with S2S ocean modeling systems is also necessary, including data-model comparisons for improving ocean model formulations and advanced data assimilation for better S2S forecasts.
Finding 5.4: Continued investment into routine space-based observations of sea surface height, sea surface temperature, and surface winds—which represent key inputs to estimates of air-sea fluxes of water, heat, and momentum—are critical to support S2S prediction systems. Developing satellite-based estimates of ocean surface salinity, currents, mixed-layer, and biogeochemical properties may further advance S2S forecasts.
Finding 5.5: In situ measurements of sea surface height and winds in coastal areas continue to be critical for S2S forecasting, as do surface meteorological observations from tropical moored arrays. Routine, in situ measurements of temperature and salinity structure at depth, as well as of coastal and equatorial currents, are
also particularly important. Expanded use of new and improved drifters, buoys, and autonomous instruments could facilitate cost-effective expansion of the observing network below the surface.
Observations of the Cryosphere and Polar Regions
More than anywhere else on Earth, the polar regions depend on unique observing methods to confront the challenges of taking measurements in extreme and harsh environments. Much of the important phenomena for S2S polar prediction contain small spatial scales, such as the high degree of spatial variability associated with melt ponds, openings in sea ice, patchiness of snow cover, and eddies in the ocean. The high reflectivity of ice and snow surfaces on land and ocean, lack of strong horizontal and vertical temperature gradients, and the extended polar night make atmospheric observations difficult from passive radiances, for example, visible measurements based on sunlight reflected from clouds or snow, or infrared measurements based on thermal contrasts. Further, sea ice is a barrier to most ocean-observing satellites. As a result, routine in situ observations are critical to complement satellite observations around the poles, in particular for ocean observations. Traditional field-based measurements are also hindered by the presence of sea ice (e.g., Figure 5.4) and a shortage of population centers from which to operate or launch instruments.
Sea ice concentration is one of the most essential variables for predicting weather and climate in the polar regions. Fortunately, sea ice concentration can be measured by passive microwave retrievals (the same satellites that observe terrestrial snow cover) through clouds and during both day and night. Passive microwave retrievals also can be used to distinguish first-year (ice that first grew on open water less than 1 year ago) and multiyear ice. These observations are available since 1979 and provide the only continuous coverage of sea ice longer than a decade. However, there is high uncertainty in sea ice concentration measurements when meltwater is present at the surface and resolutions are relatively coarse (~10 km).
Sea ice thickness is less well observed than sea ice concentration, but it is at least as important for sea ice prediction (Blanchard-Wrigglesworth et al., 2011a; Day et al., 2014). Sea ice thickness is a key constraint on the timescale of variability (~ months to years) for sea ice concentration anomalies. For example, summer sea ice coverage—a variable that is often a target for prediction—is strongly influenced by sea ice thickness in spring (Chapter 4). Scattered field-based measurements of sea ice thickness are available since the late 1950s (e.g., Lindsay and Schweiger, 2015), and in the past two decades a series of satellites and aircraft have provided good but not continu-
ous spatial coverage; in some cases instruments were turned off to extend the life of the mission (ICESat11) and in others melt water on the surface obscured the measurements in late spring and summer (IceBridge,12 CryoSat-213). At present, the only thickness-observing satellite is CryoSat-2, operated by the European Space Agency, which has been in orbit since 2010. Because remote sensing actually measures the freeboard (height of sea ice and snow above sea level), the accuracy of estimates of sea ice thickness depends critically on the availability and quality of measurements of snow depth on top of the sea ice. The lack of simultaneous measurements of snow depths and freeboard leads to significant uncertainty in the estimate of thickness, but even more problematic for S2S forecasting is the impossibility of retrieving data from the radar altimeter instrument on CryoSat-2 (and CryoSat) in the presence of surface meltwater, or roughly May-September in the Arctic. Nonetheless, CryoSat thickness measurements have been used for sea ice data assimilation to initialize forecasts in spring of the ensuing summer season (see section on data assimilation).
NASA’s IceBridge aircraft mission offers one of the best opportunities to measure simultaneous freeboard and snow depth, although the measurements are limited to about a dozen flight tracks each year over a few weeks in spring since 2007. Even in these opportune conditions, the uncertainty in IceBridge sea ice thickness is estimated to still be 40 cm (Kurtz et al., 2013). Less accurate snow depths have been estimated for the purpose of computing sea ice thickness from satellite-based measurements of freeboard in a variety of ways, including from climatological measurements (Kwok et al., 2004), accumulation of snowfall from reanalysis (Kwok and Cunningham, 2008), and an empirical method based on ice type and climatological measurements (Laxon et al., 2013). However, the accuracy of resulting sea ice thickness was not reported in these studies. Recently, snow depths have also been estimated from the SMOS satellite mission to be nearly as accurate as the IceBridge measurements (Maaß et al., 2013), which is very encouraging.
NASA plans to launch a satellite known as the second-generation Ice Cloud and Land Elevation Satellite (ICESat2) in 2017 that can measure sea ice thickness year round, but accurate and simultaneous snow depth measurement are still necessary to fully utilize these observations. Furthermore, the data need to be processed within a day or so of the observation to be useful as input for prediction of the sea ice edge at shorter lead times in S2S forecasts.
___________________
11http://icesat.gsfc.nasa.gov/, accessed January 27, 2016.
12http://www.nasa.gov/mission_pages/icebridge/index.html, accessed January 27, 2016.
13http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/CryoSat-2, accessed January 27, 2016.
Finding 5.6: Reliable and accurate year-round sea ice thickness measurements are the greatest need for sea ice prediction, and continued satellite missions will enable this key objective. However, accurate and simultaneous in situ measurements of snow depths on sea ice are needed to translate signals observable from satellite into dependable and timely sea ice thickness estimates.
Land Surface Observations
As discussed in Chapter 4, land surface characteristics are important for Earth system prediction on S2S timescales and may be particularly important for predicting extreme events, such as heat waves and droughts, as well as for characterizing the water cycle. This may be especially true during boreal spring and summer, when coupled ESMs often exhibit lower predictive skill due to weaker links between midlatitude climate systems and the oceans and an increase in land-atmosphere interactions (NRC, 2010b; Roundy et al., 2014). Soil moisture, snow depth, vegetation, water table depth, and land heat content all influence the fluxes of heat and moisture between the land surface and atmosphere, sometimes with important feedbacks to large-scale weather and climate and events such as heat waves (e.g., Guo et al., 2011; Roundy and Wood, 2015; Roundy et al., 2014). As also mentioned in Chapter 4, a number of recent studies have found that more realistic initialization of precipitation and land surface variables, such as soil moisture, snow cover, and vegetation in coupled ESMs and multi-model forecast systems improves the predictability of atmosphere and hydrologic variables on S2S timescales (Koster and Walker, 2015; Koster et al., 2004, 2010, 2011; Kumar et al., 2014; Peings et al., 2011; Prodhomme et al., 2015; Roundy and Wood, 2015; Thomas et al., 2015). The regions and time periods for which such land-atmosphere coupling is important for weather and climate prediction are also likely to expand with global warming (Dirmeyer et al., 2013, 2014).
The ability to measure land surface and hydrological variables, particularly on a global scale, is currently limited, hindering realistic model initialization and representation of important land processes and land-atmosphere coupling. For example, critical data input into land data assimilation systems comes from in situ measurements of precipitation (from rain gauges) and snow and snow depth (from weather stations and snow courses), but prediction skill has been shown to be limited in the many areas where such measurements are sparse (Koster et al., 2010). Networks such as CoCoRaHS14, the Community Collaborative Rain, Hail, and Snow Network, have improved the density of rain gauge data in the United States for research and monitoring purposes, and
___________________
such networks might be leveraged for improving real-time modeling. However, there are still vast areas in less populated parts of the country and especially abroad where there is little to no gauge data.
Although in situ networks need to be maintained and in some cases expanded in the near term to enhance S2S forecasting (see below), measurements from satellites may hold the most promise for improving the global characterization of many land surface variables. A few recent and planned satellite missions have the potential to rapidly accelerate progress toward the goal of improved surface soil moisture estimates. The European Space Agency launched SMOS in 2009 to monitor surface soil moisture (~ < 10 cm) using an L-Band microwave radiometer (Kerr et al., 2010; Mecklenburg et al., 2012). In January of 2015, NASA launched the Soil Moisture Active Passive (SMAP) satellite,15 which is designed to monitor the freeze-thaw state as well as surface soil moisture using an L-Band microwave radiometer and radar (Entekhabi et al., 2010). Despite these recent and planned developments, a number of critical gaps remain. The current failure of SMAP’s radar has (at best) delayed the full potential of SMAP data until a stand-in radar onboard another satellite can be used in tandem with SMAP’s radiometer. Observations (or better estimates) of soil moisture into the root zone will be key to exploiting the longer-term predictability associated with soil moisture and to constraining hydrologic predictions. Root zone soil moisture provides the atmosphere with a source of moisture through plant transpiration, with this deeper layer typically exhibiting longer timescales of variability than soil moisture near the surface. Remote sensing observations of root zone soil moisture are typically based on longer (i.e., P-band) microwave wavelengths. Recently, airborne radar implementations have shown skill in estimating root zone soil moisture, with an indication that satellite implementations may be possible (Konings et al., 2014; Tabatabaeenejad et al., 2015).
Observations of snow cover, multi-spectral albedo, and depth are also particularly important for improving S2S forecasts of the atmosphere and the hydrological cycle. Highly accurate global-scale observations of snow cover are currently now available from satellite platforms (e.g., the Moderate Resolution Imaging Spectroradiometer [MODIS]). Snow water equivalent (SWE) can also be estimated from space-based passive microwave radiometers, such as the special sensor microwave imager (SSM/I) and advanced microwave scanning radiometer (AMSR-E). However, these estimates contain significant caveats and uncertainties (Byun and Choi, 2014; NRC, 2010b), and the ability to retrieve snow depth and/or SWE remains a significant challenge. Continued improvement to SWE remote sensing technologies and retrieval algorithms are needed. However, given the importance of snow measurements, more networks
___________________
15http://smap.jpl.nasa.gov/, accessed January 27, 2016.
such as SNOTEL (Snowpack Telemetry), which provides real-time in situ measurements of snow depth from the 600-plus stations across the western United States, are likely needed, particularly in areas where accumulated snow pack is a large portion of the annual water cycle (e.g., for California—see case study in Chapter 3).
In addition to improved precipitation, soil moisture, and snow measurements for initializing S2S prediction systems, a number of other land surface measurements are important for advancing S2S model calibration and development and for initializing next generation operational systems. For example, the NASA SWOT mission mentioned above will provide new constraints on surface hydrology via surface water elevations and stream flow estimates. Such data will be useful for hydrology model development and land surface model calibration; similar data may be important in the longer term for initializing hydrology and river components of future S2S forecast systems. Similarly, littoral observations are useful for monitoring and modeling the effects of coupled ocean-atmosphere processes in coastal areas. For example, characterizations and fine-scale observations of land elevation, roughness, cover, soil content, vegetation, man-made structures, and anthropogenic heating would be useful for improving models of wetting-drying, as well as for risk models for storm surges from hurricanes and typhoons making landfall and for heat wave prediction. These littoral processes are directly linked to a general need to increase and automate ocean observing systems for S2S predictions, as discussed above.
Satellite measurements that can generate better estimates of evapotranspiration are sorely needed to better constrain the terrestrial water budget and its influence on surface fluxes of heat and moisture to the atmosphere. The NASA ECOsystem Spaceborne Thermal Radiometer Experiment on Space Station (ECOSTRESS) mission is an experimental multi-spectral infrared spectrometer that will provide high-resolution observations of surface temperature, which will be used to explore their value for estimating evapotranspiration and plant water stress and consumptive use. The implementation of ECOSTRESS on the International Space Station (ISS) provides for characterizing the mean diurnal cycle (which the current 16-day LandSat repeat does not offer), but it does not provide global coverage. Further, the ISS arrangement only provides for a 2-year hosting provision, and considerations of continuity should be undertaken in conjunction with the determined need and value of such measurements.
The global network of flux towers are also an important source of data in this regard, because flux towers provide critical measurements of land-atmosphere fluxes of heat, moisture, and carbon dioxide (Figure 5.5). Such flux measurements are particularly useful for developing and validating the components of dynamic models that account for processes associated with surface energy balance. To maximize improvement in
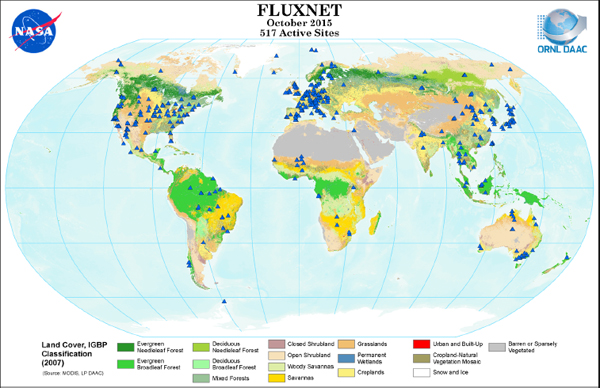
the characterization of land surfaces fluxes within S2S predictions systems, these types of observations are needed with larger spatial coverage, higher density, and in a timely enough fashion to be useful in real-time operational data assimilation.
Finding 5.7: Land observations are critical for modeling large-scale land surface-atmosphere feedbacks and for making predictions of the terrestrial water cycle. Networks of in situ measurements of precipitation, snow depth, and root-zone soil moisture are likely to remain important, but the poor spatial coverage of such networks currently limits S2S prediction. In addition to expanding in situ networks, significant research is needed to evaluate the quality and potential use of remotely sensed measurements of precipitation, soil moisture, snow water equivalent, and evapotranspiration.
Prioritizing Investment in Observations
Although a general expansion of the existing observational network will be important to improving S2S predictions, prioritizing investments is likely to be essential. One way to develop such a prioritization is through sensitivity and denial experiments using S2S forecast systems. Here, various components of the initial condition are perturbed or removed and then forecast skill impacts are assessed. As also mentioned above, a number of recent sensitivity studies have explored the importance of soil moisture initializations and associated feedbacks for S2S predictions (e.g., Fennessy and Shukla, 1999; Guo et al., 2011; Koster et al., 2004). Koster et al. (2014) further found that with certain initial perturbations, a land-atmosphere interaction resulted in a downstream phase-locking and amplification of a planetary atmospheric wave. In the weeks and months that followed, this phase-locking resulted in changes to atmospheric conditions far away from the initial perturbations. The identification of a phase-locking mechanism in a historical reanalysis data set corroborated this finding. The ability to identify the sensitivity of remote (spatially and temporally) conditions to initial soil moisture highlights the importance of soil moisture observations for S2S predictions and also identifies regions for which accurate observations may be most important. Similarly, sensitivity studies have been carried out to explore the role of snow cover on the evolution of the winter hemisphere climate (Allen and Zender, 2010; Klingaman et al., 2008; Sobolowski et al., 2010). These types of sensitivity studies can help determine sources of predictability while also emphasizing the importance of initialization by certain variables and quantities in order to realize predictability. An alternative approach to perturbing the initial conditions explicitly is to perform data denial studies (observing system experiments, OSEs) using S2S prediction models. This has become common, regular practice for operational NWP and their partners in order to accurately assess the utility of various observing platforms in reducing forecast errors in real systems with real errors. Similar efforts are also done within academic and operational ocean forecasting.
Observing system simulation experiments (OSSEs) (e.g., Arnold and Dey, 1986; Dickey, 2003; Masutani et al., 2007, 2010) provide another means of exploring the potential impact of future observing systems on S2S predictions. In an OSSE, a reference run, typically at the highest resolution possible, is generated from a free run of an ESM without data assimilation. This so-called “nature run” is considered to be the true state. Sampled values, considered as “observations,” from this nature run are then used to initialize a forecast system. The simulated observations from the nature run are thus analogous to the traditional observations used in an actual forecast and can be used by an ESM with data assimilation to assess the impact of various observations on the
analysis and forecast accuracy. Because the true state is known, analysis error can be computed explicitly. Using this methodology, a perturbation experiment is then run in which hypothetical observations are evaluated in the context of data assimilation and hypothetical forecasts. Such OSSE experiments have been used in the design and decision phases for the Aeolus Doppler wind lidar instrument for NWP (Baker et al., 2014; Stoffelen et al., 2006). OSSEs have also been proposed as a tool to design optimal air quality observations (Timmermans et al., 2015).
OSSEs are powerful tools because they allow for the exploration of hypothetical observations. However, they need to be designed and executed carefully to ensure that the results are meaningful and applicable to the real Earth system.“Perfect model” OSSEs (such as the experiments described above) measure the impact of hypothetical observations on a forecast system in which model and forecast errors are assumed to be nonexistent. To address the more realistic scenario in which models are assumed to have errors, two or more (significantly) different models are required to evaluate the impact of observations within prediction systems. The first model provides the reference/nature run and generates the “true states” from which simulated observations are extracted. The other models are then used to assimilate the simulated observations and generate forecasts that are then compared with the states generated in the first model. If the same or largely similar models are utilized, then model error goes unaccounted for, resulting in a system that is too predictable.
To assess and prioritize new observations specific to the S2S problem, either type of OSSE would need to be designed and carried out using Earth system forecast models, with the generation of the nature run performed with a high-fidelity, state-of-the-art ESM. This can be computationally expensive, especially when it comes to the storage and distribution of the nature run data. Coordination among the parties interested in such a nature run is critical. Once available, further coordination on the simulation of the observations that already exist in the current observing system will be required, paying special attention to the generation and calibration of realistic observation errors. Once these pieces are available, any hypothetical observation network could be explored for assessing its potential importance. This is one of the more promising avenues available for prioritizing what new observing systems will provide the largest benefit for S2S prediction systems.
Finding 5.8: Cost-benefit analyses will be necessary to prioritize what new observations (of current variables at higher spatial or temporal resolution and/or of new variables) will most benefit S2S prediction systems. Observing system simulation experiments, and sensitivity studies more generally, are powerful tools for exploring the benefits of specific observations on state estimation and overall model
performance and could be better used to prioritize improvements to observing networks as well as S2S model parameterizations.
The Way Forward for Observations
Observations form the foundation of S2S prediction systems, allowing the characterization of physical processes, model initialization, and the calibration and verification of model outputs. Relatively robust observing networks exist for the atmosphere over land (outside the polar regions), but current observations networks for the ocean, cryosphere, and land surface will require more attention in order to advance S2S forecasts over the next decade. The ocean in particular does not have the necessary coverage despite its very clear importance for S2S prediction. Furthermore, even for the atmosphere, some critical networks are in danger of deteriorating or of suffering breaks in continuity within the next decade. These observing systems must be maintained or replaced to prevent an erosion of S2S forecasting skill. Beyond maintaining the current observing network, development of new observing technologies and expansion of existing observing networks will present opportunities to drive improvements in models and model initializations, especially as more components are added to ESMs and forecast system capability expands, growing the need for routine observations of new variables within the Earth system (e.g., aerosols, biogeochemistry).
As described above, special effort is needed to improve observations in many parts of the world where unique physical processes take place but few routine measurements are available. These include polar regions, where sea ice, land surface, and atmospheric processes can feed back to high- and midlatitude weather and ocean conditions; tropical areas characterized by convection centers that strongly influence global circulation (e.g., Africa, South America, Indian and western Pacific warm pool); and highly dynamic coastal areas. Developing observational networks specific to capturing the fluxes of matter and energy within the Earth system also need attention, because the improper treatment of these quantities in models can result in substantial biases in water and energy budgets that compromise S2S forecast skill.
Both remotely sensed and in situ measurements will be important to maintain and expand. Satellite-based measurements are an increasingly important component of air, ice, land, and water observing systems and are critical for initializing ESMs. For atmospheric variables, it will be particularly important to maintain remotely sensed measurements of the vertical profiles of key atmospheric variables (e.g., temperature, moisture, wind) and to continue to develop measurements likely to become more important to S2S in the next decade (e.g., precipitation, cloud liquid/ice, aerosol concen-
tration and composition). For the ocean, remotely sensed observations of SST, SSH, and ocean surface winds are vital globally, and preferably at resolutions fine enough to resolve mesoscale currents and eddies. Coverage in some cases is currently provided by short-term research missions, but these must be converted to long-term missions in order to remain valuable for operational S2S forecasting in the next decade. Advances in satellite observations of salinity, mixed-layer depth, and near-surface ocean currents also have potential to benefit S2S forecasting and should be pursued.
In coastal areas, targeted and sustained in situ measurements using moorings, ships, AUVs (including gliders), and other autonomous sensing platforms (see Box 5.1) should be better coordinated and more rapidly utilized for varied S2S research and applications. The S2S needs include critical data assimilation for land-ocean coastal predictions and also the evaluation of satellite products. Further advances in ocean observing technology and coverage could have tremendous value for characterizing important S2S processes, for improving models, and for providing information for forecast initial conditions. Effective integration of the increasing ocean observations and platforms with S2S ocean modeling systems is also necessary, including data-model comparisons for improving ocean model formulations and advanced data-assimilation for better S2S forecasts.
For the cryosphere, continued investment into generating year-round, remotely sensed sea ice thickness measurements, including snow depth on top of the sea ice, are critical, though in situ measurements may continue to be needed in order to translate these measurements into dependable and timely routine estimates. For the land surface, new and/or planned missions for surface soil moisture, surface water, and evapotranspiration may add considerable value to S2S forecasting, especially for model development, but again many of these are research missions with limited lifespans. Quantities for which there would be a great benefit to develop new or better satellite measurements include snow water equivalent and root zone soil moisture.
For many remotely sensed variables, continued work to develop better retrieval algorithms will be necessary to realize the full potential of the observations. Looking further ahead, the development of more capable and cost-effective satellite observing systems should continue to be investigated, including constellations that provide multi-sensor observations, small satellite deployments (e.g., CubeSat16) that reduce costs and increase sampling rates and coverage, and new, expanded, and/or more economical sensor designs that provide routine measurements for operational forecasts. Investment in in situ and high-resolution observations, especially from remote
___________________
16http://www.cubesat.org/, accessed January 27, 2016.
or uninhabitable regions and other regions with poor coverage remains important, in many cases even with current and planned advances in the remotely sensed observation network. These include measurements from radiosondes, precipitation gauges (particularly in mountainous areas where TRMM is compromised), snow courses, flux towers, and subsurface ocean measurements of salinity, temperature, and ocean velocity at depth from drifters. More broadly distributed coastal radar networks for surface current measurement are also a key need.
Measurements from moored tropical arrays, which are critical for S2S forecasts of ENSO, also need to be maintained. The design of the tropical moored arrays predates modern S2S forecast systems or the Argo drifter network. If the agencies that have been sustaining the tropical mooring network now find it to be fiscally unsustainable, then its optimal and sustainable design should be revisited using OSSEs with modern S2S forecasts systems to assess their value for ENSO and other S2S forecasts and an analysis that deliberately accounts for the relative maintenance costs, historical instrument attrition rates, and/or issues (e.g., international political considerations and cost-sharing) of the various mooring locations. However, it is the view of the committee that until such deliberate analysis and redesign have been carried out, every effort should be made to maintain the current operational tropical mooring network with its current configuration.
The committee recognizes that establishing and maintaining in situ networks pose unique challenges, especially in remote locales not suitable for staffed observations and difficult climates. Looking ahead, developing automated and semi-automated instruments that can operate to a year or longer with minimum or no maintenance would allow for large increases in spatial coverage. Technology for automated instruments (e.g., automated radiosonde launchers and ocean gliders and floats) exists but needs to mature (see Box 5.1). On the ocean side, power consumption typically limits the range or lifetime of floats and gliders, and the ongoing development of smaller and more energy-efficient sensors would be beneficial for a diverse range of autonomous observing platforms. Cost-benefit analyses are necessary to justify the financial and logistical burden.
Recommendation E: Maintain continuity of critical observations, and expand the temporal and spatial coverage of in situ and remotely sensed observations for Earth system variables that are beneficial for operational S2S prediction and for discovering and modeling new sources of S2S predictability.
Specifically:
- Maintain continuous satellite measurement records of vertical profiles of atmospheric temperature and humidity without gaps in the data collection and with increasing vertical resolution and accuracy.
- Optimize and advance observations of clouds, precipitation, wind profiles, and mesoscale storm and boundary layer structure and evolution. In particular, higher resolution observations of these quantities are needed for developing and advancing cloud-permitting components of future S2S forecast systems.
- Maintain and advance satellite and other observational capabilities (e.g., radars, drifters, and gliders) to provide continuity and better spatial coverage, resolution, and quality of key surface ocean observations (e.g., SSH, SST, and winds), particularly near the coasts, where predictions of oceanic conditions are of the greatest societal importance in their own right.
- Maintain and expand the network of in situ instruments providing routine real-time measurements of subsurface ocean properties, such as temperature, salinity, and currents, with increasing resolutions and accuracy. Appropriate platforms for these instruments will include arrays of moored buoys (especially in the tropics), AUVs, marine mammals, and profiling floats.
- Develop accurate and timely year-round sea ice thickness measurements; if from remote sensing of sea ice freeboard, then simultaneous snow depth measurements are needed to translate the observation of freeboard into sea ice thickness.
- Expand in situ measurements of precipitation, snow depth, soil moisture, and land surface fluxes, and improve and/or better exploit remotely sensed soil moisture, snow water equivalent, and evapotranspiration measurements.
- Continue to invest in observations (both in situ and remotely sensed) that are important for informing fluxes between the component interfaces, including but not limited to land surface observations of temperature, moisture, and snow depth; marine surface observations from tropical moored buoys; and ocean observations of near-surface currents, temperature, salinity, ocean heat content, mixed-layer depth, and sea ice conditions.
- Apply autonomous and other new observing technologies to expand the spatial and temporal coverage of observation networks, and support the continued development of these observational methodologies.
Although it would be beneficial to expand the geographic coverage and resolution of many types of observations, cost and logistics demand that priorities be determined. Beyond the general need for more routine observations of the ocean, land, and cryosphere to support coupled S2S prediction systems, it is not always clear a priori
what measurements will be most beneficial. Determining where to add measurements of existing variables or which new variables to add can be planned more effectively through the use of OSSEs, OSEs, and other types of sensitivity studies that specifically utilize S2S forecast systems in their design and execution. For the case of satellite observations, a recent NRC study also provides a value and decision framework that allows prioritization of new versus continuous measurements (National Academies of Sciences, Engineering, and Medicine, 2015b).
Recommendation F: Determine priorities for observational systems and networks by developing and implementing observing system simulation experiments, observing system experiments, and other sensitivity studies using S2S forecast systems.
DATA ASSIMILATION
Data assimilation (DA) is the process of quantitatively estimating dynamically evolving fields by combining information from observations with the predictive equations of models. A key purpose of DA is to create initial conditions, which are used to produce operational forecasts as well as retrospective forecasts and reanalysis (see Figure 5.1). DA is also used to control error growth within the model due to limits in predictive capability. Most assimilation schemes are derived from estimation theory (Gelb, 1974; Jazwinski, 1970), information theory (Cover and Thomas, 2012; Sobczyk, 2001), control theory (LeDimet and Talagrand, 1986; Lions, 1971), and optimization and inverse problem theory (Tarantola, 2005).
In operational weather and ocean forecasting centers today, approximations are commonly made to assimilate observations into the model state and parameter spaces. Some common assumptions include assuming normal, Gaussian error distributions for the observations and for the model state (which are often not normally distributed); using small ensemble sizes to characterize the uncertainties in a high-dimensional space (i.e., rank deficiency); assuming uncorrelated observation errors; and using linearized operators for transforming the model state to observation space or using a linearized version of the S2S model itself. These assumptions can have significant impacts on the quality of the analysis (Daley, 1991; Evensen, 2009; Kalnay, 2003), and research is needed to develop data assimilation techniques that help overcome these challenges.
Although traditionally grounded in linear theory and the Gaussian approximation (Kalman, 1960), recent research progress has focused on the development of more efficient assimilation methods that account for nonlinear dynamics and utilize non-
Gaussian probabilistic features. Even though several of these schemes would be challenging to employ in large, realistic S2S systems, some of the recent progress is promising for probabilistic S2S predictions and for the reduction of inherent uncertainties. Enhancing the coupling between components of ESMs is an important challenge in S2S prediction, and recent research on coupled DA is also promising. Accounting for the accurate and possibly non-Gaussian transfer of observed information from one component of the Earth system to another is very important for enhancing the capabilities of strongly coupled S2S forecasting systems.
In this section, the committee provides details on the status of DA efforts in major components of S2S ESMs and then highlights opportunities for advancing S2S forecast systems through coupled DA, hybrid assimilation methods, Bayesian DA, reduced order stochastic modeling, and the estimation of parameter values and parameterizations. Recommendations for priority research in these topics conclude the section.
State Estimation in Earth System Model Components
State estimation in Earth system components has generally been performed using DA techniques from one of two classes of estimation approaches: (1) maximum likelihood estimates or (2) minimum error variance estimates. In geophysical applications, the former can be associated with the so-called variational methods (Courtier and Talagrand, 1987) and the latter to Kalman Filters/Smoothers (Kalman, 1960) and ensemble-based schemes (Evensen, 2009).
As pointed out in the 2010 NRC report on improving intraseasonal to interannual (ISI) climate prediction, improving the assimilation of atmospheric observations has yielded significant gains in numerical weather prediction skill (Figure 5.6). For operational atmospheric NWP applications, incremental variational assimilation has become the method of choice, including 3D-Var (Kleist et al., 2009; Lorenc et al., 2000) and 4D-Var (Courtier et al., 1994; Rabier et al., 2000). More recently, hybrid assimilation algorithms that combine ensemble and variational methods have led to some further success (Bonavita et al., 2015; Clayton et al., 2013; Kuhl et al., 2013; Wang et al., 2013b). Some operational centers are pursuing hybrid four-dimensional ensemble-variational (4D-EnVar) techniques either as a first implementation of a 4D scheme (NCEP, Kleist and Ide, 2015), as a replacement (Environment Canada; Buehner et al. 2013), or potential replacement (United Kingdom Met Office [UKMO], Lorenc et al., 2015) for 4D-Var. The hybrid ensemble-variational algorithms have potential computational savings and scalability. This is because tangent linear and adjoint (transpose of the tangent linear to propagate sensitivities backward in time) versions of the prediction model are not

needed as direct components of the assimilation solver itself. Such scalability has implications for coupled DA (see below) given that strong coupling can be achieved without the need for the adjoint of the coupled models (Bishop and Martin, 2012).
Ocean DA has led to substantial improvements in ocean forecasting capabilities and scientific understanding of ocean processes (Bennett, 1992; DeMey, 1997; Evensen, 2009; Lermusiaux, 2006; Malanotte-Rizzoli, 1996; Rienecker, 2003; Robinson et al., 1998; Wunsch, 1996). Ocean DA is frequently employed for reanalyses that optimally combine model simulations with observations and so allow for quantitative scientific studies of ocean phenomena from the small to the global ocean scales. Operational ocean forecasting has also been enhanced by DA from estuaries and regional seas to the global ocean (e.g., Chassignet and Verron, 2006; Fox et al., 2002; Pinardi and Woods, 2002; Schiller and Brassington, 2011). The research in DA and uncertainty prediction methods has also been very active in ocean studies (Cummings et al., 2009; Evensen, 2004; Evensen, 2009; Lermusiaux et al., 2006), in part because of the lack of legacy systems (as is the case in atmospheric models), which allow for direct implementations of
new methods for real-time forecasting (e.g., Lermusiaux, 1999; Oke et al., 2008) and for optimized reanalysis (Moore, 2013; Wunsch and Heimbach, 2013).
Assimilating data in sea ice models has also been done successfully (e.g., Kauker et al., 2008; Lindsay and Zhang, 2006; Stark et al., 2008; Wang et al., 2013b) but usually only for sea ice concentration using nudging or adjoint methods. Equally often, sea ice forecasts have been made in models that assimilate observations in the atmosphere and/or ocean only (e.g., Chevallier et al., 2013; Guemas et al., 2014; Merryfield et al., 2013a; Msadek et al., 2014; Wunsch and Heimbach, 2013), with mixed results in the sea ice cover. Improvements in sea ice model DA are on the horizon: The Ensemble Kalman Filter (EnKF) has been used to assimilate sea ice concentration and ice freeboard (height above sea level) by a Belgian university research group (Mathiot et al., 2012) and either sea ice concentrations alone (Lisæter et al., 2003) or with sea ice drift and a suite of upper ocean variables by a Norwegian center (Sakov et al., 2012).
Among the myriad of variables in modern land models, soil moisture and SWE are thought to be the most important sources of predictability for the Earth system, highlighting their importance within the initialization step (e.g., Koster et al., 2011, Chapter 4, and the observations section above). However, until recently, soil moisture monitoring from satellites has been too shallow (at only a few millimeters depth) to be useful for DA directly, and SWE has not been available with sufficient accuracy or coverage.
Often, land surface state estimates are generated offline using Land Data Assimilation Systems (LDAS) that incorporate near real-time information about meteorological forcing such as wind, temperature, and precipitation from both models and observations (NRC, 2010b). The global land data assimilation system (GLDAS; Rodell et al., 2004), developed jointly by the National Aeronautics and Space Administration (NASA) and the National Oceanic and Atmospheric Administration (NOAA), makes use of both ground- and space-based observational information to constrain modeled land states in addition to the meteorological forcing from a separate atmospheric DA system. The GLDAS is a mixture of traditional DA for parameters such as surface temperature and snow cover, with constraining offline land model-integration that produces estimates of other variables such as soil moisture, snow depth, soil temperature, and surface water storage. Thus for some land surface variables, LDAS systems are not necessarily DA systems in the same sense as described for atmospheric and oceanic components, but instead constrain integrations of offline land surface models.
There is progress within LDAS algorithms and within the Land Information System (LIS; Kumar et al., 2006) to use more traditional assimilative techniques such as a simplified Extended Kalman Filter for other variables such as soil moisture (de Rosnay et al., 2013). This will become more viable as new instruments for measuring soil moisture
from the SMOS and SMAP satellite missions come on line and are directly assimilated into LDAS (e.g., LIS User’s Manual). Although difficulties with monitoring SWE remain, assimilation of the related variables of snow cover fraction from MODIS (Zhang et al., 2014) and terrestrial water storage from GRACE (Su et al., 2010) in an ensemble Kalman filter scheme has improved the simulation of SWE indirectly. However, progress has been slow as the application of traditional (atmospheric) DA techniques for the land surface is complicated by the spatial variability and heterogeneities of surface parameters and because of the aforementioned issues with observations (Balsamo et al., 2014).
In summary, although not as advanced as DA in operational atmospheric models, DA systems in other Earth system components are beginning to embrace ensemble-based or hybrid assimilation algorithms as a way forward. Results so far indicate that this is a promising direction because it allows for a combination of the advantages of the different approaches. Xu et al. (2014) show one such example for a land surface application, where a hybrid assimilation scheme is used to improve the assimilation of snow fraction information. Extending schemes such as this to generate coupled ensembles could help forecast the uncertainties and then be used to perform the DA accordingly, either within a weakly or strongly coupled update step (see below). The use of an ensemble from coupled models would also significantly simplify the design and implementation of coupled background error covariances, which are needed for coupled assimilation. In other words, the data in one field can update the state in another field directly based on these coupled error covariance estimates.
As a final note, it is important to keep in mind that although advanced data techniques are generally able to extract information from observations, the process of data assimilation is fundamentally dependent on the observing system. A system that is under-observed will not yield accurate state estimates, further highlighting the need to maintain and enhance the observing system (Recommendation E) and to utilize quantitative methods (e.g., OSSEs) to do so.
Finding 5.9: In operational centers, the most advanced data assimilation techniques are usually implemented in atmospheric data assimilation. Other Earth system components are also moving toward ensemble Kalman filter-based or hybrid data assimilation algorithms, allowing for the possibility of seamless assimilation and/or synergy within a framework of coupled data assimilation.
Finding 5.10: Research activities in data assimilation schemes are occurring uniformly across fields, including for land, ocean, and ice applications, but also for engineering, applied mathematics, and other sciences. The potential of all of these
multidisciplinary advances cannot be underestimated, and several of these new schemes have potential for S2S applications.
Coupled Data Assimilation
Historically, many centers performed the assimilation of each of the Earth system components—atmosphere, ocean, land, sea ice—independently. But because the systems coevolve, such disconnected assimilations can compromise forecast skill. Although this may not pose a problem for very long forecasts (annual to decadal), it can be a significant issue for S2S timescales, where initial conditions are still quite important. Advances include implementing a so-called “weakly coupled” assimilation, in which the background state (Figure 5.7) is computed from a freely evolving coupled model and then subsequently broken into parts that are needed for each component. Next, assimilation is done component by component (i.e., ocean, atmosphere, sea ice, and land analyses are quasi-independent). The various analyses are then stitched back together to initialize the coupled model and run the forecast. This is in contrast to the aforementioned uncoupled analyses, in which all steps in Figure 5.7 are integrated component wise. NCEP’s Climate Forecast System (v2) has already developed a weakly coupled system for both reanalysis (necessary for retrospective forecasts and calibration) and the generation of initial conditions for the real-time operational seasonal forecasts (Saha et al., 2010). Most other operational centers are moving in a similar direction, and many centers are adopting such a philosophy even for weather prediction (Hendrik Tolman, personal communication, April 22, 2015).
Weakly coupled assimilation also allows each possible Earth system component to determine its most appropriate assimilation scheme. The ECMWF OOPS (Object Oriented Programming System17) project and the United States JEDI (Joint Effort for Data Assimilation Integration; Tom Auligné, personal communication, February 5, 2016) project are examples of methods to potentially achieve such coupling in a convenient, efficient manner. Specific assimilation schemes for each component can also be employed in a strongly coupled framework, assuming connections across components are maintained within the assimilation step (this is discussed in more detail below).
A challenge for coupled assimilation is that the spatial and temporal scales of phenomena and errors are quite different among the various Earth system components. A direct practical effect of these scale mismatches is different assimilation update cycles
___________________
17http://www.data-assimilation.net/Events/Year3/OOPS.pdf, accessed February 5, 2016.
employed in today’s single-component assimilation systems (e.g., the time step in Figure 5.7). The scale mismatches are in large part a consequence of when and how often observations are available. For example, because of insufficient satellite coverage, most global ocean DA systems utilize daily or weekly assimilation windows on the order of days. This is infrequent relative to global atmospheric DA systems in which more observations are available. These often use a 3-hour, 6-hour, or 12-hour window and update cycle. Regional and coastal DA, as well as submesoscale weather assimilation, can have even shorter windows (e.g., minutes to an hour) when observations are available. Considering all of these scales, some of the key questions are What is the best way to combine the separate components into a single, streamlined algorithm? How can the error characteristics of the multiple scales and dynamics be efficiently represented for
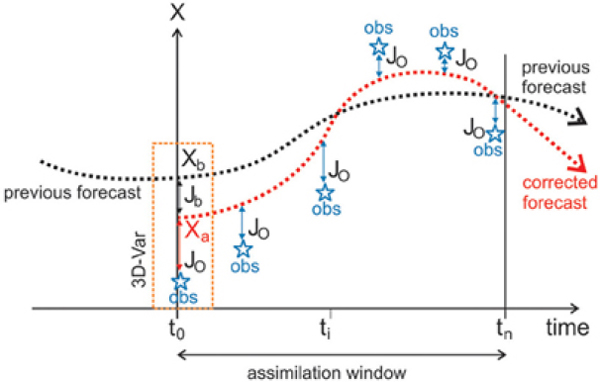
use in DA? What are the most pressing needs within the context of future nonlinear, coupled DA schemes?
A promising long-term solution is so-called “strongly coupled” DA (e.g., Lu et al., 2015; Sluka et al., 2015; Smith et al., 2015b; Tardif et al., 2014). In strongly coupled DA, observations within one component are allowed to directly and instantaneously impact the state estimate in other components (with constraints). Early attempts at performing strongly coupled DA using an OSSE for a relatively simple coupled-atmosphere-ocean system have shown promise (Sluka et al., 2015). The first set of experiments assimilated only atmospheric observations into the coupled model using weakly and strongly coupled assimilation configurations. Not too surprisingly for a configuration without assimilation of oceanic observations, the strongly coupled configuration reduces the oceanic analysis root mean square error (RMSE). Perhaps more intriguing is the fact that the atmospheric analysis RMSE is also reduced within the strongly coupled configuration (Figure 5.8).
Given that weakly coupled assimilation systems have been successful thus far (Climate Forecast System Reanalysis/Climate Forecast System version 2 (CFSR/CFSv2), Saha et al., 2010, 2014) and that there are many computational complications to implement-
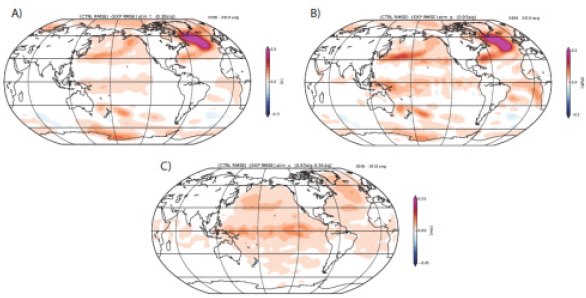
ing strong coupling in today’s operational systems, more research is needed to explore potential benefits of strongly coupled systems for operational S2S forecasting. First, techniques need to be developed to estimate and test coupled (e.g., cross-dynamics, cross-media, and cross-component) interactions (e.g., covariances) for Gaussian assimilation updates and their generalizations (e.g., mutual information) for nonlinear updates. Such estimation and verification of interactions are needed to avoid erroneous updates. Given the different spatial and temporal scales associated with observations in various components, it may not always be practical to allow some observations in one component to directly alter the fields in another component during each assimilation update: If the coupled covariances used in the direct coupled update are not accurate, then observations of the ocean (perhaps observing a slow process) could, for example, erroneously update the lower atmosphere (faster processes). Theoretically, in the Gaussian assimilation update, if the covariances across components are represented with enough accuracy, then such strong coupling will be successful. In nonlinear and non-Gaussian assimilation updates, covariances can be generalized to the mutual information between the field variables of the Earth system. A successful strong coupling would then require an accurate representation of such mutual information across the entire modeling system.
Multiscale and multi-dynamic DA also require more research to advance coupled DA in S2S forecast systems. Ideally, observed information should be transferred across component boundaries in accordance with multiple dynamics and scales, respecting dynamical causality and avoiding spurious correlations, for example due to ensemble-rank deficiencies or too approximate adjoint models. To address this issue, ensemble sizes would need to be increased or efficient reduced-order uncertainty prediction schemes employed (see below). Attention is especially needed for variational approaches, because adjoint equations derived for the coupled systems are not always the same as each component’s adjoints stitched together, particularly when across-component fluxes (e.g., air-sea fluxes) are nonlinear. Similar issues apply to hybrid DA schemes, because complex multiple dynamics (even within a single component of the Earth system) also need to be represented accurately in the coupled updates. Observations collected by the diverse observing system, which contain multiple dynamics and temporal and spatial scales, may also require special treatment. This might include the filtering of dynamics or scale so as to remove the risk of spurious coupling before assimilation into S2S prediction systems. For example, in the ocean, short tidal scales are challenging to handle in global models, and internal tides and waves should not be assimilated as eddies. In conclusion, to be successful, strongly coupled DA for S2S systems requires research in efficient methods, multiscale and coupled-dynamics assimilation updates, non-Gaussian nonlinear updates, and reduced-order stochastic schemes for efficient forecasting of coupled statistics.
Finding 5.11: Although so-called weakly coupled assimilation has been successful for generating initial conditions for S2S prediction systems, there is potential for so-called strongly coupled assimilation to substantially improve state estimates for coupled systems. More research is needed to determine the benefits of strongly coupled systems.
Bayesian Data Assimilation, Reduced-order Uncertainty Quantification and Probabilistic Forecasting
As mentioned above, many DA algorithms used in operational systems today are linear, based on linearizations, or based on varied heuristic hypotheses and ad hoc approximations. Most of these assumptions are related to the probability densities of the model state and its errors, and of the observations and their errors. For highly nonlinear dynamics or non-Gaussian relations, these assumptions may prove difficult to overcome. S2S dynamics are prime examples of multiscale, nonlinear dynamics, from turbulence to large-scale dynamics, across the multiple physical processes occurring in the Earth system. As a result, the field variables that describe the S2S dynamics (e.g., temperature, winds, currents, ice cover) can have complex intermittent behavior, with multiple scales and nonstationary heterogeneous statistics. Furthermore, S2S prediction requires accurate forecasts of both the likelihood of specific events and of overall expected conditions over longer S2S lead times. Efficient reduced-order stochastic methods and Bayesian techniques can help address these issues of non-Gaussian relations, the former for the accurate forecast of probability densities (uncertainty quantification) and the latter for the rigorous combination of observations with these forecasts (Bayesian DA).
The importance of accounting for nonlinearities in geophysical DA has been known for some time (e.g., Miller et al., 1994). Nonlinearities affect the dynamical evolution and, as a result, geophysical fields can be characterized by complex, far-from-Gaussian statistics (Dee and Da Silva, 2003; Lermusiaux et al., 2006; NRC, 1993). With the introduction of the ensemble Kalman filter (Evensen, 1994; Houtekamer and Mitchell, 1998), error subspace schemes (Lermusiaux and Robinson, 1999), square root filters (Tippett et al., 2003; Whitaker and Hamill, 2002), and Monte Carlo methods (Doucet et al., 2001) have grown rapidly within the atmospheric and oceanic DA community. In addition to utilizing the inherent nonlinearities of the governing equations, stochastic methods allow exploration and exploitation of probabilistic structures. Nonlinearities in general lead to non-Gaussian structures, which need to be used in the assimilation updates (Bocquet et al., 2010). This allows the use of mutual information in the coupled DA.
Nonlinear Non-Gaussian Data Assimilation
One class of non-Gaussian DA methods is particle filters (e.g., Ades and van Leeuwen, 2015; Pham, 2001; van Leeuwen, 2009), which evolve probability density functions (pdfs) using a discrete set of models states or particles. A related interest has been the approximation of distributions by Gaussian Mixture Models (e.g., Alspach and Sorenson, 1972; Anderson and Anderson, 1999; Bengtsson et al., 2003; Sondergaard and Lermusiaux, 2013b). An advantage of Gaussian Mixture Models (GMMs) is that they become equivalent to Gaussian schemes when a single component is found sufficient to describe the forecast pdfs but can represent more complex multi-modal pdfs by increasing and optimizing the number of components in the mixture. Such Bayesian DA methods could be further developed for the S2S system components and for strongly coupled DA. A critical need, then, is the efficient and accurate prediction of coupled pdfs, which is in the realm of uncertainty quantification.
Uncertainty Quantification and Probabilistic Forecasting
Probabilistic forecasting and the quantification of uncertainties are critical when systems are nonlinear and have uncertain terms in their governing equations or in their initial and boundary conditions (see also section below on Calibration, Verification, and Combination of S2S Forecasts). Ensemble predictions provide uncertainty estimates, but so far using only a relatively small number of forecasts. To address the resulting rank-deficiency, various localization approximations (Bengtsson et al., 2003; Lermusiaux, 2007) and useful heuristic arguments (Anderson and Anderson, 1999) have been used. However, just as the adjoint equations allow variational DA based on linearized partial differential equations (PDEs), uncertainty propagation schemes now allow Bayesian DA using pdfs predicted based on nonlinear PDEs.
Stochastic model forecasts are feasible with numerical methods for stochastic PDEs (Kloeden and Platen, 1999; Xiu, 2010) including direct methods (Doucet et al., 2001) and polynomial chaos expansion and spectral methods (Ghanem and Spanos, 1991; Le Maître and Knio, 2010; Najm, 2009). These approaches can be categorized as either intrusive or nonintrusive, depending on whether or not they require modification within the numerical model itself. The nonintrusive Monte Carlo method (i.e., running an ensemble of simulations with or without random forcing) can provide the full statistics of the problem. However, such ensemble simulations have convergence rates usually proportional to the square root of the number of samples. The polynomial chaos expansion (Ghanem and Spanos, 1991; Li and Ghanem, 1998; Nouy, 2007; Xiu and Karniadakis, 2002) based on the theory by Wiener (e.g. Wiener, 1958) can represent
and propagate large uncertainties through complex models. (For useful ocean applications, see Mattern et al. [2012] and Thacker et al. [2012, 2015]).
To account for the time dependence of both the uncertainty and dynamics, generalized Karhunen-Loève expansion with time varying coefficients and basis functions have also been used (Lermusiaux, 2001; Lermusiaux and Robinson, 1999). Recently, dynamically orthogonal stochastic PDEs (Sapsis and Lermusiaux, 2009, 2012; Ueckermann et al., 2013) have been obtained. These reduced PDEs allow efficient probabilistic forecasts. Sondergaard and Lermusiaux (2013a, 2013b) developed a Bayesian nonlinear filtering scheme that combines these reduced PDEs with Gaussian Mixture Models, showing advantages of respecting nonlinear ocean dynamics and preserving non-Gaussian statistics.
In summary, Bayesian DA and uncertainty quantification (UQ) methods have shown significant promise to advance coupled DA and UQ, but continued research is needed to yield significant impacts within the context of realistic S2S coupled ocean, atmosphere, land, and ice applications. If new numerical modeling systems were to be developed or augmented, then it would be essential to consider stochastic forcing, uncertainty quantification, observation models, and coupled DA schemes as part of their development for physical and numerical consistency. The advent of the uncertainty forecasting and Bayesian inference methods described above, which directly utilize the original coupled governing equations and their numerical schemes, would thus be directly relevant to S2S applications, because they imply the integration and coupling of the S2S modeling components (e.g., atmosphere, land, sea, and ice) from the start.
Finding 5.12: Research on Bayesian data assimilation and uncertainty quantification has grown substantially in atmospheric and oceanic sciences and also across disciplines such as applied mathematics and engineering. These methods, which allow for the optimal use of the full probabilistic information and utilize rigorous reduced-order differential equations, hold promise for integrating components of S2S prediction systems and for coupled data assimilation. Needs include research on hybrid methods, multiscale and coupled-dynamics assimilation updates, Bayesian data assimilation, and rigorous reduced-order stochastic methods.
Importance of Reanalysis for Retrospective Forecasts, Validation, and Parameterization
Retrospective DA with frozen variables, so-called “reanalysis,” plays a crucial role in providing initial conditions for retrospective forecasts and as validation data sets
from which to perform verification and calibration (see also Combination, Calibration, Verification, and Optimization section below). Reanalyses also provide insights into model process shortcomings (see Models section below). Indeed for more than 40 years, reanalysis data sets have led to improved understanding of the Earth system, prediction at longer lead times, and diagnosis of extreme events and long-term trends. Having physically consistent data sets across Earth system components is vital for diagnosing, initializing, and validating S2S prediction systems, which are dependent on representing coupling in order to realize forecast skill. Despite their importance, global reanalyses are a huge undertaking, requiring a massive amount of staff time, computation time, and data.
A variety of global reanalysis efforts have been carried out at many different prediction centers (e.g., www.reanalyses.org, accessed January 27, 2016). These reanalyses have different motivations and goals (Dee et al., 2011; Ebita et al., 2011; Rienecker et al., 2011; Saha et al., 2010; Uppala et al., 2005). However, the advancement of modeling capabilities, coupled DA techniques, and harvesting of additional historical observations continue to have potential to vastly improve reanalysis data sets, especially coupled reanalysis for S2S prediction. As an example, NCEP is planning for its next generation coupled reanalysis capability as part of the development of version 3 of its Climate Forecast System. The plan includes significant developments to aspects of the reanalysis system, including observations, modeling, assimilation (including coupled DA), and the addition of new components such as aerosols and waves. There are similar efforts elsewhere in the international community (Dee et al., 2014). Although some of these efforts involve performing reanalyses through the satellite era, other efforts are re-creating data sets for much longer time periods, such as the NOAA 20th century reanalysis (Compo et al., 2011), ERA CLIM (Stickler et al., 2014), and CLIM-2,18 which will utilize the coupled DA for climate reanalysis (Laloyaux et al., 2016).
Although these reanalyses will provide physically consistent state estimates for the Earth system components that are part of the S2S systems, there is a disconnect between the retrospective initialization from these reanalysis data sets and the initialization of real-time forecasts. The real-time initializations generally evolve away from the frozen reanalysis systems because of the addition of new observations and/or improvements in the DA itself. In other words, the real-time initialization evolves with advancements to avoid significant deterioration that could occur if the assimilation were to be kept frozen (i.e., instruments eventually disappear and are replaced with new observing platforms).
___________________
18http://www.ecmwf.int/en/research/projects/era-clim2, accessed February 5, 2016.
Finding 5.13: Reanalyses are critical for generating retrospective forecasts, studying predictability, and validating S2S forecasts. Continued investment in global reanalysis research and operational production will be important for advancing S2S predictive capabilities. Improving the temporal continuity and the frequency of reanalysis may be particularly beneficial.
Data Assimilation to Improve Cloud Representation
One difficult problem in atmospheric DA involves the use of cloudy and precipitation-affected satellite radiances (Bauer et al., 2011; Errico et al., 2007). Currently, many centers ignore fields of view that are affected by clouds and precipitation (particularly for infrared radiances), only utilize the partially clear scenes, or assimilate so-called “cloud-cleared” radiances. Cloudy and precipitating radiances are particularly important because they help prescribe the state in areas of the globe undergoing disturbed conditions. Ignoring these observations leaves gaps in the most dynamic parts of the atmosphere, areas that are likely to have the largest error growth. Improving the use of observations in cloudy areas is a very active area of research among the operational NWP centers, with some progress being made over the past several years (ECMWF, UKMO, NCEP; Geer et al., 2014). Further advancing the use of such observations may be especially critical in the tropics, for example, in initializing the state of the MJO.
Along similar lines, only a tiny fraction of available satellite observations of the atmosphere (particularly infrared and radar observations) are actually assimilated into NWP models. Although the assimilation of rain rate and precipitable water from TRMM and SSM/I has been successful for NWP (Benedetti et al., 2005; Treadon, 1996; Tsuyuki, 1997), data from space-based precipitation radars remain underutilized. Similar to cloud and precipitation-affected radiances, space-based radar is problematic for present DA schemes because of nonlinearity and difficulty in forward simulation. Gaussian variable transform has the potential to improve the assimilation of precipitation data into NWP models (Lien et al., 2015), and further improvements may be possible through direct assimilation of dual-polarization reflectivities from the Global Precipitation Mission core (e.g., Hou et al., 2014, see also Observations section).
In summary, better atmospheric initializations in cloudy and precipitating areas is important for predicting the evolution of important S2S phenomena such as the MJO (e.g., Benedetti et al., 2005; Hou et al., 2014; Lien et al., 2015; Treadon, 1996; Tsuyuki, 1997; Vintzileos and Behringer, 2008), along with the potential for benefits in predicting soil moisture. Such improvements might also lead to better reanalyses, better cloud climatologies, and thus greater potential for exploration of sources of predictability.
Finding 5.14: Observations continue to be underutilized in atmospheric data assimilation, particularly satellite-based microwave and infrared radiances over land and in cloudy/precipitating fields of view. Better utilization is important for filling in some of the data gaps over dynamically active regions, and also for characterizing the states and properties of cloud and precipitation-related processes, which will be essential to preparing for cloud-resolving capability.
Fully Exploiting Data Sets to Estimate Parameters and Parameterizations
In addition to being important for initializing models, DA is a sophisticated means of using observational information for the estimation of uncertain model parameters (Bell et al., 2004; Evensen, 2009; Navon, 1998; Ruiz and Pulido, 2015; Smedstad and Obrien, 1991; Smith et al., 2013; Trudinger et al., 2008). Two particularly relevant recent studies have explored the use of DA-based parameter estimation for coupled atmosphere-ocean models (Kondrashov et al., 2008; Zhang et al., 2015). Here, using inline parameter estimates significantly reduced model biases, even for variables such as deep ocean temperature and zonal ocean currents that had no observations assimilated to the model to constrain them directly. Parameter estimation has also been shown to be feasible for intermediate ESMs (Annan et al., 2005). However, the challenges mentioned above for state estimation are similar or even more relevant for parameter estimation, because of intrinsic nonlinearity. More research is needed to extend the usefulness of DA for parameter estimation (e.g., Bocquet, 2012; Bocquet and Sakov, 2013). DA has also been used to estimate variables in the Earth system that are not well observed and/or may not have any a priori information, such as surface carbon fluxes (Kang et al., 2012). Thus a bright research area is the use of DA to rigorously discriminate among model formulations and parameterizations, which is critical for both scientific understanding and applications.
Finding 5.15: In addition to being useful for optimal state estimation, data assimilation can be an extremely powerful tool for performing parameter estimation and optimizing model performance, which may become critical for S2S applications. It is important that reanalysis data sets and diagnostics therein, such as analysis increment and innovation statistics, continue to be publicly disseminated to assist in parameterization development and parameter estimation.
The Way Forward for Data Assimilation
DA is an essential part of S2S prediction systems and is critical for generating real-time initial conditions as well as the initial conditions for the retrospective forecasts (in the form of reanalysis). However, a number of issues in current DA need to be resolved to improve S2S forecast systems. First, parts of the varied observing systems remain underutilized by current DA techniques. Examples include the lack of assimilation of satellite information in cloudy and precipitation regions and the limited use of ocean observations collected by the increasing number of autonomous ocean platforms. More research is needed to comprehensively and effectively assimilate such measurements for S2S applications. Some of the challenges originate from the multiple spatial and temporal scales occurring within and across the components of the Earth system. Ideally, the multiscale and multi-dynamic information contained in the observations could be fully assimilated. Multiscale hybrid methods, coupled-covariance update algorithms, and nonlinear non-Gaussian schemes show promise for addressing these challenges, but need research to mature.
Second, given that S2S predictions will continue to rely on coupled ESMs, coupled DA will remain at the forefront of S2S research and operational innovations. However, S2Sspecific challenges for coupled DA originate from practical, computational, methodological, and dynamical hurdles, all of which need to be overcome. For example, most operational centers continue to face inconsistencies that result from independent or quasi-independent state estimates being pieced together in uncoupled or weakly coupled assimilation systems. Overcoming such limitations will become ever more important as S2S prediction systems become more complex (i.e., adding new components such as aerosols and surface waves). Instead of being ignored, the complex but known dynamical interconnections and the corresponding coupled covariances or mutual information should be exploited. If the coupling is correct, then it is likely to increase accuracy of S2S forecasts. To allow such immediate impact of observations from one component to another, and across varied dynamics, efficient strongly coupled assimilation schemes are needed. The potential of the first strongly coupled algorithms has already recently been demonstrated for simple coupled models with 4D-Var (Smith et al., 2015a) and EnKF schemes (e.g., Sluka et al., 2015). However, strongly coupled assimilation schemes are in their infancy and have not yet been tested on more complex S2S coupled systems. Thus practical and computational research is needed, in part to assess the potential value added by moving to strongly coupled DA schemes and to establish whether implementing strong coupling is worth the added cost and complexity to operational S2S systems. Methodological and dynamical
research is also needed, especially to employ and improve assimilation methods that exploit the coupled dynamics to perform multiscale and coupled assimilation updates.
Third, DA, uncertainty quantification, and probabilistic prediction methods are critical for S2S forecasting, but are today often characterized by heuristics and approximations that are employed for computational expedience more than accuracy. Needs in this area include efficient stochastic schemes to forecast the coupled statistics and coupled Bayesian DA updates to fully utilize the coupled statistics. Novel uncertainty quantification schemes and reduced-order stochastic methods that efficiently integrate the governing stochastic partial differential equations are being developed and may in the future represent possible further avenues for improvement of S2S forecast systems. These could replace computationally expensive direct Monte Carlo S2S ensemble predictions (i.e., the integration of a number of model simulations with different initial conditions, boundary conditions, and stochastic forcing). Research on Bayesian DA has also grown recently in atmospheric and oceanic sciences, as well as across disciplines such as applied mathematics and engineering. These methods, which allow the optimal use of the full probabilistic information and utilize rigorous reduced-order differential equations, should also be considered for implementation in the components of S2S prediction systems.
Finally, as the complexity of coupled ESMs grows, an increasing number of model and coupling parameters will need to be explored and specified. At present, this is done too often through trial and error. This could eventually become unsustainable because of the ever-growing complexity and computational cost. Hence, the most sensitive and important model parameters should be identified for the next generation of coupled prediction models. Being informed by observations from all components, DA can identify and optimize these parameters and also discriminate among and learn the better parameterizations. As a whole, novel parameter estimation and model learning schemes are promising and critical for S2S applications.
Recommendation G: Invest in research that advances the development of strongly coupled data assimilation and quantifies the impact of such advances on operational S2S forecast systems.
Specifically:
- Continue to test and develop weakly coupled systems as operationally viable systems and as benchmarks for strongly coupled implementations.
- Further develop and evaluate hybrid assimilation methods, multiscale- and coupled-covariance update algorithms, non-Gaussian nonlinear assimilation, and rigorous reduced-order stochastic modeling.
- Optimize the use of observations collected for the ocean, land surface, and sea ice components, in part through coupled covariances and mutual information algorithms and through autonomous adaptive sampling and observation targeting schemes.
- Further develop the joint estimation of coupled states and parameters, as well as quantitative methods that discriminate among, and learn, parameterizations.
- Develop methods and systems to fully utilize relevant satellite and in situ atmospheric information, especially for cloudy and precipitating conditions.
- Foster interactions among the growing number of science and engineering communities involved in DA, Bayesian inference, and uncertainty quantification.
MODELS
Central to improving S2S predictions is improving the quality of the models that are at the core of modern state-of-the-art prediction systems. In this section, the committee provides evidence to support the conclusion that reducing errors and biases in ESMs must be a top priority for improving coupled S2S prediction systems. We first discuss in general terms model errors and the steps that need to be taken to reduce them. For convenience, issues more specific to advancing models of the atmosphere, ocean, land surface, and sea ice are discussed in separate subsections, although, of course, the full problem is inherently a coupled one. Another subsection highlights the importance of process studies for model improvement. The committee concludes with a subsection that contains recommendations for priority research to reduce model errors in order to increase the skill of S2S predictions.
Model Errors
One of the key challenges for S2S prediction is the reduction of model errors. Model errors include two types of deviations from observations, both of which contribute to the deterioration of S2S forecast skill:
- Deviations that are highly variable in time, which make the predicted variability unrealistic;
- Deviations from observations that are persistent in time, which make the predicted mean state unrealistic—these are often referred to as model biases.
Improving model skill through techniques such as statistical correction using retrospective forecasts, and combining outputs of different models to create multi-model ensemble products (see section below on Combination, Calibration, Verification, and
Optimization), clearly enhance forecast skill and will remain an important part of the S2S prediction process for the foreseeable future. However, model errors can be large compared to the predictable signals of variability targeted by S2S forecasts, and they can also combine nonlinearly, making statistical post-processing very difficult. Furthermore, without reduction of model errors, all other steps taken to improve S2S prediction systems can only shorten the distance between the current skill and the model-estimated limit of predictability (see Chapter 4), whereas reducing model errors can bring the skill of S2S forecast systems substantially closer to fundamental limits of predictability within the Earth system.
Known errors in ESMs are numerous. For example, many global models produce an unrealistically strong Pacific equatorial cold tongue, a spurious double Inter Tropical Convergence Zone (ITCZ), erroneously high Indian Ocean and tropical South Atlantic SSTs, low SSTs in the tropical North Atlantic, and wet or dry biases in rainfall in many parts of the world (e.g., Hirota et al., 2011; Li and Xie, 2014; Richter et al., 2012; Roehrig et al., 2013; Toniazzo and Woolnough, 2014). Many climate models also have a large bias in MJO variance (Hung et al., 2013). Improving models’ ability to represent processes such as the MJO and ENSO—critical sources of S2S predictability (see Chapter 4)—includes improving not only the representation of means and variances of such phenomena, but also their evolution and associated global teleconnection patterns. For example, it is possible for a model to have little bias in the mean and variance of both conditions in the tropics and middle latitudes, yet the variability in these two regions may not be correctly linked. Such a connection contributes to subseasonal forecast skill in both regions (e.g., Lin et al., 2010; Vitart and Jung, 2010).
Many of the same modeling errors relevant to S2S predictions are relevant to shorter and longer range forecasts. Figure 5.9 shows an example of the growth of SST errors in coupled model simulations. It is clear that many features of climate model errors are seen in forecasts of only a few weeks or even days in length (e.g., cold equatorial Pacific, generally warm Indian Ocean, and cold Arabian Sea) and that some of the errors are quite substantial on S2S timescales. Efforts targeted at understanding and alleviating these errors are thus relevant for improving predictions on multiple timescales (NRC, 2012b). The use of observational and short-term error information has been used to identify biases in climate models, for example through the Department of Energy Cloud-Associated Parameterizations Testbed Program.19 Similarly, many issues are common across multiple modeling systems. For example, the strength of MJO-NAO teleconnections is deficient in subseasonal and seasonal simulations of many different operational models (Scaife et al., 2014a; Vitart et al., 2014).
___________________
19http://www-pcmdi.llnl.gov/projects/capt, accessed January 27, 2016.
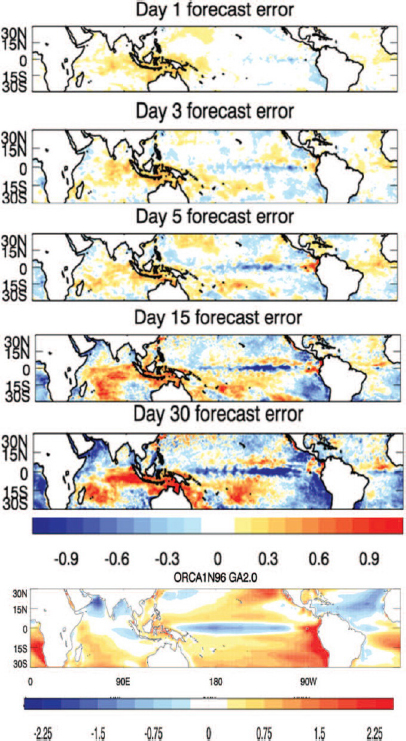
Model errors often have no single cause but arise from combined deficiencies in model representations of many important processes (e.g., clouds, microphysics, radiation, boundary-layer processes, surface fluxes, and ocean mixing). Reducing these errors will require improving the representation of processes that are, for the most part, already included in models used for S2S prediction (e.g., increasing model resolution to explicitly represent critical processes and improving parameterization schemes to better represent subgrid processes—see discussions below for more details). In some cases, extra complexity needs to be added to better represent feedbacks between different components of the Earth system (e.g., coupled ocean-atmosphere, ice-atmosphere, and land-atmosphere processes—discussed in more detail below). As described elsewhere in this report, an improved representation of additional variables (e.g., algal blooms, river levels) may also be crucial because these variables are important to decision-makers, whether or not their evolution feeds back on other components of the Earth system.
Finding 5.16: Errors in current modeling systems are a major limiting factor in the skill of S2S predictions. Many of the issues are common across different modeling systems and a broad range of timescales (days to centuries). These errors are the result of multiple deficiencies in model representations of key processes that are currently parameterized.
Atmospheric Models
Several steps are essential to improve the atmospheric component of S2S forecast systems. These include increasing model resolution to explicitly represent important atmospheric processes, improving parameterizations of processes that remain unresolved, improving the representation of tropical convection, and enabling global cloud-permitting models. Each is discussed in detail below.
Increasing Model Resolution
Increasing model resolution (horizontal and vertical) can reduce model errors, as more processes are explicitly resolved, and there is accordingly less reliance on uncertain physical parametrizations (Kinter et al., 2013). Later in this chapter, the committee discusses the extreme case where the resolution is increased so significantly that deep convection becomes resolved. However, as discussed there and in Chapter 7, although an exciting research avenue, it is unknown whether this approach will be operationally viable in the coming decade because of the large computational costs involved.
Recent work has shown that more modest increases in atmospheric model resolution may bring significant benefits. Examples include increasing horizontal resolutions to better resolve the land-sea distribution in the Maritime Continent (Crueger et al., 2013), where the MJO in models exhibits more difficulty propagating eastward than over the open oceans (Inness and Slingo, 2006; Weaver et al., 2011) ; increasing vertical resolution in the atmosphere to better represent the stratosphere (e.g., Roff et al., 2011; Scaife et al, 2011), which is increasingly recognized as a source of predictability on S2S timescales (see Chapter 4); increasing vertical resolution of the upper ocean to better resolve the diurnal cycle of the mixed layer that interacts with the atmosphere, leading to improved MJO simulations (Tseng et al., 2015); and increasing horizontal resolution to improve representation of blocking and the Annular Modes (Jung et al., 2012; Kinter et al., 2013; Palipane et al., 2013; Scaife et al., 2011). Further work to investigate what can be achieved by increasing resolution in the atmosphere is important, and coordinating such work with research on benefits of simultaneous increases in resolution across other components in a coupled model framework may be particularly important for S2S prediction (NOAA, 2015). However, it is already clear from existing work that increasing resolution in atmospheric models alone is not a panacea for increasing forecast skill in the current generation of models. Improvement of parameterizations will still be needed for substantial enhancement of S2S forecast skill (e.g., Jung et al., 2012; Vitart 2014).
Finding 5.17: There is evidence that increasing the resolution of atmospheric models (while still at resolutions that need deep convection parameterization) may improve the representation of processes that are key sources of S2S predictability. However increasing resolution is far from a panacea without also improving physical parameterizations.
Improving Parameterizations
There are very significant uncertainties with parameterizations of many physical processes in the atmosphere that are not currently resolved by models (e.g., boundary layer, convection, clouds and microphysics, radiation, surface fluxes, land surface and watershed scale processes, gravity wave drag). These uncertainties are in large part responsible for the model errors, which (as previously discussed) are a major limiting factor in the quality of S2S predictions. For example, leading NWP centers are taking very different approaches to the parameterization of drag on unresolved mountains (Figure 5.10). Although in practice there is considerable compensation such that parameterizations with weak mountain drag tend to have higher boundary layer drag
(and vice versa), these different balances cannot all be correct. Such differences matter with regard to the representation of large-scale circulation, and this situation is illustrative of the general uncertainties in the field of parameterization.
Recent experience at many operational centers has indicated that improvement in physical parameterization typically leads to improvements in features more obviously of relevance for S2S (Vitart, 2014). As an example, improved entrainment in the cumulus parameterization of the ECMWF model has led to better representation of the MJO (Hirons et al., 2013). Improving parameterization requires advanced understanding of the physical processes at play, which involves research on theory, targeted field observations, and the use of cloud-resolving or cloud-permitting models as tools. Further examples of such efforts and additional steps needed to improve parameterizations
across atmosphere, ocean, land surface, and sea ice models are provided below in the subsection on Process Studies for Model Advancement.
Finding 5.18: Improving physical parameterizations is essential to reducing model errors. The primary barriers are incomplete understanding of real physical processes and the challenges associated with encapsulating new knowledge of how the real atmosphere works in multiple and interacting model parameterizations.
Improving the Representation of Tropical Convection
There are important challenges associated with almost all aspects of atmospheric model physics, as described above. However, one particular issue of great importance for the quality of S2S predictions (both in the tropics and beyond) is fidelity of the representation of tropical convection in the atmosphere (e.g., Holloway et al., 2014; Sherwood et al., 2014). Tropical convection is crucial to propagating teleconnections between the tropics and midlatitudes—associated with ENSO on the seasonal timescale and with the MJO on the subseasonal timescale (Chapter 4).
One important approach to improving the representation of tropical convection is to continue to develop and improve upon traditional parameterizations. Progress in recent years includes increasing the sensitivity of models to environmental moisture, including convective momentum transport, incorporating at least some representation of convective organization (particularly at the mesoscale), treating convection as a stochastic process, and including nonlocal effects in cumulus parameterization. Work to improve upon traditional parameterizations needs to continue; however, a more focused effort to develop completely new schemes may be especially valuable (Holloway et al., 2013). The time may be ripe for such efforts, as results from recent field campaigns continue to increase the understanding of convection and its interaction with other processes, and scientists are beginning to have access to high-resolution cloud-permitting simulations across large (e.g., Marsham et al., 2013) and even global domains (Satoh et al., 2012). Such high-resolution numerical simulations were, for example, used as part of the recent international Year of Tropical Convection (YOTC—see Appendix C for more detail) program (Moncrieff et al., 2012; Waliser et al., 2012) and provide an invaluable testbed for developing understanding and approaches to be used in coarser resolution models, while also spearheading efforts to demonstrate a prototype of future, cloud-resolving S2S model systems (see also discussion below).
One intermediate step to improve cumulus parameterization within the limit of available computing capability is “super-parameterization” or multiscale modeling
(Khairoutdinov and Randall, 2001; Randall et al., 2013). In this approach, a 2-D cloud-resolving model at each grid point of the host model replaces a traditional parameterization in order to explicitly represent deep convection. This approach demands much less computational resources than a full 3-D global cloud-permitting model, although it still suffers (as do many traditional parameterizations) from the fact that it is local, for example, without direct interaction between convection at neighboring host model grid cells. Sensitivities to other parameterizations (e.g., turbulence and microphysics) also remain. Nevertheless, there is evidence that the super-parameterization approach, by virtue of representing tropical convection more accurately than conventional parameterizations, produces superior simulations and predictions when coupled to an active ocean model (DeMott et al., 2011; Stan et al., 2010). The approach has led to important improvements, notably, in simulations of the MJO (Benedict and Randall, 2009) and diurnal cycle in rainfall (Pritchard and Somerville, 2009). Its feasibility to incorporate into operational models is worthy of further investigation.
Finding 5.19: Improving the representation of tropical convection is a particularly important challenge for S2S. Continued efforts to develop new convection parameterizations and to build on recent progress in multiscale modeling and scale-aware parameterization are needed.
Enabling Global Cloud-Permitting Models
In a cloud-permitting model, the grid spacing is fine enough (a few kilometers or less) that deep convection is explicitly calculated without the need of parameterization. Work to move atmospheric models toward cloud-permitting capacity is motivated by the notion that behavior of deep convection can be adequately determined only when mesoscale dynamics governing convective structure and evolution are explicitly represented. Simulations by the first global cloud-permitting model have led to improved representation of important S2S processes such as the MJO (Miura et al., 2007), tropical cyclones (Fudeyasu et al., 2008), Asian summer monsoon (Oouchi et al., 2009), and the diurnal cycle of rainfall (Sato et al., 2009), among other phenomena. Although such improvements suggest that the development and use of global cloud-permitting models in operational settings should continue to be pursued, a number of important caveats to this approach need to be noted. The first is that while parameterization of deep convection would no longer be needed, parameterization of shallow convection, turbulence, radiation, cloud microphysics, and surface fluxes would all still be required. Without deep convection parameterization, deficiencies in schemes for those processes would still lead to model errors (which might be different from
those in coarser resolution models). Hence research to further improve parameterization schemes will remain crucial, even with global cloud-permitting capacity. Also, the huge computational demand that would be required to make global cloud-permitting models operational for S2S is a currently a crucial limitation. For example, upgrading a model from a resolution of 60 km to 2 km would require the computational power to increase by well over a factor of ~1,000 (i.e., 30x30) for the horizontal resolution alone. A further factor of around 30 would be required to allow for desired decreases in time step and finer vertical resolution. Overall, this means increasing computation power by at least four orders of magnitude. Realistically, this will not be achieved in the next decade, based on the current trajectory of advancement in computing technology (see Chapter 7).
Caveats aside, there are many good reasons to pursue global cloud-permitting modeling in research mode. Such research will show the way for operational developments beyond the 10-year horizon and could yield significant insights and improvements to operational models with parameterized convection within 10 years. For example, predictability studies with cloud-permitting models might give different indications from coarse-resolution models of what improvements in S2S forecast skill could be possible. Furthermore, as mentioned above, detailed high-resolution synthetic data sets from these cloud-permitting research models (global, or at least, large domain) will continue to provide critical insights into real atmospheric processes, as well as a testbed against which new parameterizations for operational systems can be developed and evaluated. Lastly, even if it is unlikely that global cloud-permitting models would become operational in the next decade, it could be of great benefit for the S2S research community to develop cloud-permitting research models if an unexpected revolution in computing industry allowed operational cloud-permitting models to move forward.
An alternative hybrid approach worthy of consideration is adaptive meshes, which focus high resolutions only in some areas (e.g., Chen et al., 2013, for hurricanes). Its justification comes from the fact that in many areas of the world, cloud-permitting resolution is not needed (e.g., in deserts, subtropical highs, and polar areas where deep convection is very unlikely to occur). Utilizing cloud-permitting meshes only when and where deep convection occurs would benefit computational efficiency, and this approach is becoming more feasible as scale-aware cumulus parameterization schemes are also being developed (e.g., Arakawa and Wu, 2013; Grell and Freitas, 2014).
Finding 5.20: Continued development of global cloud-permitting models is needed to provide insights for improving coarser-resolution operational models, to offer research testbeds for understanding many issues relevant to S2S prediction, and to advance prototypes for future cloud-permitting S2S model systems. Improved
model equations as well as improved numerics with adaptive meshes and higher-order schemes could serve as an important alternative or an intermediate approach before global cloud-permitting models become feasible for operations.
Ocean Models
The ocean is often described as the flywheel of the Earth’s climate (Visbeck et al., 2003), where the ocean’s large heat capacity (2.5 m of water contains as much thermal energy as the entire atmospheric column) acts as stabilizer. Outside of the tropics, the ocean has traditionally been described as reacting to high-frequency changes of the atmospheric forcing and that its influence back to the atmosphere is weak on short timescales (Kushnir et al., 2002). However, one needs to distinguish between applications that are sensitive to slowly evolving boundary conditions (e.g., NAO, ENSO) and ones that are sensitive to rapidly evolving boundary conditions (e.g., diurnal cycle impact on MJOs, convection, severe weather). Ocean numerical models are often designed to be optimal for a specific application (e.g., global, coastal, ENSO) and do not perform equally everywhere. It is therefore important to fully understand the implications of the numerical and physical choices that were made when the model was developed in order to correctly interpret the model outputs (e.g., Griffies et al., 2000).
In this section, ocean models, their application to S2S forecast systems, and their current strengths and limitations are described. Broadly speaking, many of the issues are similar to those outlined above in the atmospheric models section, including the importance of improving parameterizations of subgrid processes, while also exploring the benefits and trade-offs of increasing ocean model resolutions.
Established Ocean Models
Most existing ocean models are community models and are used extensively for a wide range of global, basin-scale, and regional simulations, with timescales ranging from hours to millennia for both operational forecasting (see GODAE, 2015, for a review) and research (e.g., Hecht and Hasumi, 2013). Most models solve similar geophysical fluid equations and use related finite-difference or structured mesh finite-volume numerics. These have all evolved from the pioneering work of Bryan (1969) and others (e.g., Bryan and Cox, 1968; Semtner, 1995).
Substantial improvements that are typical of more modern models include the use of higher order and monotonic tracer advection schemes, the replacement of a rigid lid with a split time-stepping scheme that directly models the adjustment of the free
surface via external gravity waves, and more accurate representations of bathymetry. Significant effort has also gone into the selection of the vertical coordinate. This can have a large impact on the quality of a simulation, with geopotential-height, terrain-following, or density-coordinates, or hybrids between these options, being common choices (Griffies et al., 2000). Algorithmic simplicity, interactions between the ocean flow and topography, water mass preservation, and the representation of dense gravity currents are all factors that have been used in choosing the right vertical coordinate for a particular ocean modeling application. Such mature, horizontally structured–mesh ocean models will be the basis for global operational S2S forecasting systems for the foreseeable future, even as they continue to be incrementally improved. But it is clear that unstructured-mesh ocean models with higher order numerics have a lot of potential for S2S forecasts as discussed below.
Finding 5.21: Horizontally structured–mesh ocean models will continue to be the basis for most operational coupled S2S forecasting systems for the foreseeable future.
Ocean Eddies, Model Resolution, and Subgrid Processes
The current resolution of horizontally structured–mesh ocean models ranges from coarser-mesh, non-eddying (e.g., below the resolution required to resolve large-scale eddies) resolutions for climate simulations (~1º), to finer-mesh, eddying models (~1/10º or 7 km at midlatitudes). Most of the impetus for integrating high-resolution eddying models in global numerical simulations comes from the need by navies throughout the world for advanced global ocean nowcasting/forecasting systems (in the United States, the resolution will be increased in 2017 to 1/25º (~3.5 km at midlatitudes); Chassignet et al., 2014; Metzger et al., 2014). Of course, for many ocean-related applications on S2S timescales, such as oil spill modeling (e.g., Deep Water Horizon) and fisheries/algal bloom prediction, higher resolution ocean models are necessary. Although there is a demonstrated need for fine-resolution systems for predicting oceanic variables outside the naval context (GODAE, 2009), the question arises as to whether explicitly resolving ocean eddies matters to coupling with the atmosphere and therefore to S2S atmospheric forecasts. In a recent comparison of coupled simulations with high- and low-resolution ocean numerical models, the correlation between SST anomalies and the surface heat flux was found to be small outside the tropics for the low-resolution experiments, indicating that the atmospheric forcing of SST variability is predominant at that resolution (Kirtman et al., 2012). On the other hand, the high-resolution (1/10º horizontal resolution, i.e., eddying regime) simulation showed
high correlations in regions of enhanced SST variability, such as western boundary currents and the Antarctic Circumpolar Current. This suggests that the atmosphere actually responds to the oceanic variability in areas of high SST variability and that higher model resolution is needed to improve atmospheric as well as ocean predictions.
There is also evidence that small-scale heat-content anomalies are more strongly and extensively correlated with precipitation in coupled model simulations with an eddy-resolving ocean, suggesting a mechanism whereby internally driven ocean variability may influence the deep atmosphere. For example, Bryan et al. (2010) show that characteristics of frontal-scale ocean-atmosphere interaction, such as the positive correlation between SST and surface wind stress, are realistically captured only when the ocean model component explicitly resolves the ocean eddies. Griffies et al. (2015) further show the importance of transient mesoscale eddies on the ocean heat budget, providing an additional argument for either explicitly including eddies in coupled model simulations, or for employing parameterizations that faithfully reflect the role of eddies in both lateral and vertical heat transport. Submesoscale SST gradients may also be important loci for coupling to the atmosphere (Back and Bretherton, 2009; Li and Carbone, 2012; Smith, 2013).
Oceanic eddies exhibit a wide range of spatial scales, from large rings that detach from western boundary currents via mixed barotropic and baroclinic instabilities (e.g., Gulf Stream, Kuroshio, Agulhas, North Brazil, Gulf of Mexico Loop Current); to baroclinic eddies whose slumping effects need to be accounted for in order to correctly model the transports of water masses (e.g., Gent, 2011) and the dynamics and structure of major current systems such as the Antarctic Circumpolar Current (e.g., Farneti et al., 2010; Hallberg and Gnanadesikan, 2006); to the submesoscale eddies with horizontal scales on order of a kilometer that drive the frontal restratification of the surface mixed layer (e.g., Fox-Kemper et al., 2008). All of these oceanic eddies have effects that must be represented in skillful ocean forecast systems, either by explicit resolution or through parameterization. The large meanders and rings are readily captured in ocean models with resolutions on the order of 1/4° or finer, while submesoscale eddies are characterized by spatial scales of less than a kilometer and need to be parameterized in essentially all large-scale ocean models (Fox-Kemper et al., 2011). Baroclinic eddies pose a particular challenge, because the dominant length-scale of these eddies (the first baroclinic deformation radius) varies greatly with latitude, stratification, and ocean depth. As shown in Figure 5.9, global numerical ocean models with spatial resolutions ranging from 1° to just a few kilometers include both regions where the dominant baroclinic eddy scales are well resolved and regions where the model’s resolution is too coarse for the eddies to form. Because of the relative spatial scales of these eddies and the mean state upon which they operate, commonly used baroclinic
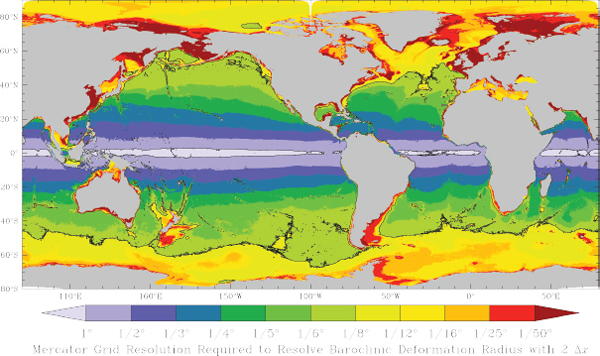
eddy parameterizations (e.g., Gent et al., 1995) are more effective at suppressing eddy variability than they are at replicating their effects on the mean state (Hallberg, 2013). Consequently, it is usually preferable to allow a model to explicitly simulate oceanic eddies rather than parameterize them, wherever the resolution permits this. Essentially all global ocean forecast models for the next 10 years and beyond will be operating within the resolution range where baroclinic eddies can be explicitly represented in most of the domain, but still have to be parameterized on the shelf and at high latitudes (Figure 5.11). Additional research is thus required to determine how best to parameterize the effects of ocean eddies where they are not resolved and how to transition between areas where eddies are resolved and where they are parameterized (see the CLIVAR Exchanges (2014) Special issue on “High Resolution Ocean Climate Modeling” for a discussion). Other subgrid processes also must be taken into account for S2S prediction. Several National Science Foundation (NSF)/NOAA-sponsored Climate Process Teams (CPTs)20—for example, groups of scientists who have worked
___________________
20http://www.usclivar.org/climate-process-teams, accessed January 27, 2016.
together to improve parameterizations of particular processes—have developed parameterizations of internal tides and surface wave–induced mixing, but these need to be evaluated.
Finding 5.22: Subgrid ocean processes, including eddies, internal tides, and surface wave–induced mixing, need to be more explicitly resolved or better parameterized in ocean models used in S2S forecast systems, and their impact on S2S forecasts need to be better evaluated.
Multiscale Ocean Modeling
For improved S2S applications, instead of a uniform increase in resolution, one approach that may be more affordable computationally would be to increase the ocean horizontal resolution in targeted geographical areas that have a strong dynamical impact on the system (for example, the tropics or coastal regions). Such targeted increases in resolution would improve the representation of energetic motions and exchanges that occur in regions with complex geometry and/or dynamics and that have been found significant for larger scale regional and global ocean dynamics.
Two approaches may allow for optimized refinements in areas with larger dynamical gradients, near steep topography, or around complex coastlines. Nesting uses finer modeling grids in targeted regions, while unstructured grids increase the mesh resolution progressively where needed within the same modeling framework. New techniques that use different equations depending on the space and timescales are also very promising and would allow for the explicit representation of, for example, small rivers, surface waves, internal waves/tides, nonhydrostatic effects, ecosystem structure, localized hypoxia, or leads in sea ice. All of these approaches are areas of active research in the multiscale ocean modeling community, but for the most part they are not yet ready for immediate deployment in operational S2S forecasting systems.
However, these approaches are already starting to play an important role in targeted regional applications (e.g., Chen et al., 2011). Research into these and related approaches for improving fundamental and operational ocean modeling are a crucial part of the S2S decadal research agenda. Because development of robust numerical modeling systems takes time, strengthening research in the United States now will be required to reap potential operational benefits in the next decade and further.
Finding 5.23: There is potential benefit for including multi-resolution approaches (e.g., adaptive mesh refinement, seamless two-way nesting, multi-dynamics,
adaptive super-parameterizations) in the ocean components of S2S coupled prediction models.
Parameterization of Surface Waves Effects
There is a growing recognition that accurate modeling of the upper ocean boundary layer needs to account for the impact of surface gravity waves. Surface waves induce Stokes drift, radiation stresses due to horizontal gradients of the momentum flux, enhanced vertical mixing due to Langmuir turbulence, and enhancement of bottom drag in shallow water. Most ocean models do not have the vertical resolution to take these effects into account and therefore must be parameterized for an accurate representation of these effects. In particular, Langmuir turbulence can reach the base of the mixed layer and drive entrainment (Harcourt, 2015; Li et al., 1995). Wave-driven parameterizations have been implemented and tested for use in climate modeling (see Li et al., 2015, for an example) and have been shown to improve mixed-layer representation. Furthermore, because air-sea fluxes depend on not only the conditions in the atmosphere, but also the processes in the upper boundary layer and mixed layer as well as the sea state (Chen et al., 2007), surface wave effects must be taken into account for S2S prediction, as do tidal effects on mixing. Although this air-wave-ocean coupling has been implemented in some operational models (e.g., ECMWF, COAMPS) it has not been in others (e.g., NCEP).
Finding 5.24: Including surface wave effects in S2S Earth system models could lead to a more accurate representation of the upper boundary layer and sea state.
Higher-Order Numerics
Although the existing horizontally structured–mesh ocean models described above have excellent computational efficiency per degree of freedom, most are based on conservative but relatively low-order staggered discretizations (e.g., Griffies et al., 2000, 2010). There is a growing body of research on the use of unstructured-grid, adaptive-mesh, or higher-order methods (Beck, 2009; Deleersnijder et al., 2010; Mavriplis, 2011; Slingo et al., 2009) that aim to increase models’ accuracy without a concomitant increase in computational cost. A specific advantage of unstructured meshes is their geometric flexibility, which allows for more accurate solutions, but a significant drawback is a reduced efficiency per degree of freedom. As a result, many unstructured-grid models have focused on shallow water regions with complex geometries (e.g., estuaries) and/or continuous schemes for finite volume or finite elements. In addition, unstructured
finite-volume schemes are usually limited to second-order numerics in space. For higher-order spatial discretizations with significant advection, finite elements are possibly more versatile. Discontinuous Galerkin schemes also appear promising and are being developed for open baroclinic ocean modeling (e.g., Blaise et al., 2010; Karna et al., 2012, 2013; Maddison et al., 2011a, 2011b; Ueckermann and Lermusiaux, 2016). Similar efforts are occurring for atmospheric modeling at varied scales and resolutions, and for different purposes (e.g., Giraldo and Restelli, 2008; Marras et al., 2015; Nair et al., 2009; Palmer, 2012; Pielke, 2013). For example, the Naval Research Laboratory is developing a Discontinuous Galerkin dynamical core for its Navy Environmental Prediction sysTem Utilizing the NUMA corE (NEPTUNE) atmospheric model (NUMA is the Nonhydrostatic Unified Model of the Atmosphere DG core). It is currently being tested for accuracy, scalability, and computational cost (Gabersek et al., 2012). Other next generation atmospheric models are under development, including community ESMs with probabilistic capabilities (e.g., Hurrell et al., 2013; Palmer, 2012).
Finding 5.25: Inspired from computational fluid dynamics and related fields, new numerical methods and higher-order schemes are being developed for ocean modeling. The resulting higher-order accuracy and enhanced refinement capabilities can reduce numerical errors in ocean models, which is a promising development for the longer-term prediction needs of S2S applications.
In summary, priorities for ocean model improvements for S2S forecasting include both fundamental numerical capabilities and improved depictions of important oceanic phenomena. An example of an important new numerical capability would be the ability to focus resolution in particular regions of phenomenological (e.g., straights that constrain flows) or forecast interest (e.g., harbors) in global ocean models. Many important oceanic phenomena are simply omitted from most S2S forecasting systems, such as tides and their interactions with storm surges. Oceanic mixing of nutrients is important for biological productivity on S2S timescales, but in models it is the result of both numerical artifacts and deliberate parameterizations, motivating improvements on both sides. The dynamics of the near surface ocean are of particular importance for the coupled ocean at S2S timescales, so the representation of ocean boundary layer turbulence and its interactions with waves and sea ice are a promising subject of study for improving S2S forecasts. But the most important limitation on oceanic S2S forecasts arises from the global influence of the ocean at these timescales, along with the need to accurately represent many important oceanic phenomena at relatively small scales to capture this influence. This need to model the global ocean with fine-scale detail places a premium on computational capacity available for S2S forecasts and on utilizing numerical techniques that maximize the value of the available resources.
Sea Ice Models
As discussed in Chapter 4, sea ice is an important source of predictability to the Earth system because sea ice anomalies can persist for up to a few years, during which time the anomalies can influence ocean and atmospheric conditions. Furthermore, predicting sea ice itself is valuable for its impact on transportation and coastal erosion vulnerability, among other things. Sea ice models need to capture the physical processes that give rise to the high degree of heterogeneity in sea ice thickness, melt-pond coverage, and other characteristics that influence shortwave radiation, clouds, atmospheric stability, and ocean freshwater exchange. Many NWP models do not include interactive sea ice components, and the local sea ice concentration and thickness in these models is prescribed and constant with only the surface temperature and (sometimes) the snow depths allowed to vary (see, e.g., specifications of NOAA’s GFS21). To predict the evolution of the ice and snow thickness, and heat transfer within the ice and snow and with other components, the sea ice component in coupled ESMs must be interactive and at a minimum include sea ice thermodynamics. Adding explicit modeling of sea ice dynamics—such as the sea ice motion and deformation that redistributes the ice thickness locally and produces openings, known as leads—can, along with modeling thermodynamics, allow for predictions of sea ice concentration.
Sea ice components in climate models and ESMs have evolved significantly over the past two decades because of recognition that sea ice strongly influences radiative and ocean feedbacks and because observations have offered improved constraints on sea ice processes and parameterizations (e.g., Bitz et al., 2012; Notz, 2012). Many sea ice models account for an ice-thickness distribution, which treats a distribution of sea ice thicknesses in an individual model grid cell, to improve the fidelity of processes that strongly depend on sea ice thickness, such as sea ice growth and compressive strength. Models are also beginning to treat brine cycling (Hunke et al., 2011) to simulate biogeochemistry within the ice and model the process of melt pond formation and drainage. However, most of the sea ice components in models used for S2S applications are much simpler, with bare-minimum dynamics and thermodynamics (e.g., Merryfield et al., 2013b; Msadek et al., 2014; Wang et al., 2013a).
The small-scale features at the floe scale and below suggest that model resolution may be important to improving predictions. The frequency of grid cells with very low sea ice concentration and very high net heat flux to the atmosphere has been found to increase at higher resolution (Newsom et al., 2015). New sea ice dynamical schemes that account for anisotropy of sea ice properties (e.g., preferred orientation of frac-
___________________
21http://www.emc.ncep.noaa.gov/GFS/doc.php#seaice, accessed January 27, 2016.
tures and faults within the horizontal plane) over tens of kilometers, and much more while treating the sea ice as a continuum, may be a promising alternative to explicitly resolving fine scales (e.g., Tsamados et al., 2013). However, such methods are not yet well tested, and little research has been done to investigate their potential for S2S applications.
Several potentially important processes are as yet missing or untested in nearly all ESMs including (1) blowing snow and the redistribution of snow on sea ice, (2) floe size distribution influence on ice growth and deformation, (3) waves breaking floes, and (4) ice microstructure (i.e., porosity and/or defects) influence on compressive strength. Inclusion of these processes into S2S systems may offer opportunities to predict new sea ice properties with societal value.
In summary, priorities for sea ice model improvements for S2S prediction include parameterizing the subgrid-scale distribution of sea ice thickness and floe sizes and treating the evolution of albedo, heat, and liquid water of melt ponds. These aspects of sea ice strongly influence the seasonal cycle of sea ice concentration and thickness. Modeling the anisotropy of deformation offers the potential of predicting the orientation of leads, which could be an advantage for planning shipping routes. The more advanced models have these capabilities already, but they are not routinely used nor have they been investigated for the purposes of S2S prediction.
Finding 5.26: Sea ice models used for S2S often use bare-minimum thermodynamics and dynamics. However, sea ice models have been developed with sophisticated physics that account for phenomena such as the ice-thickness distribution, melt ponds, biogeochemistry, and divergence/convergence processes. New methods are being developed to account for wave-floe interactions, blowing snow, and ice microstructure.
Finding 5.27: The fidelity of sea ice simulations appears to improve with resolution. New promising sea ice dynamic parameterization schemes may preclude the need for high resolution in some situations, but little research has been done to investigate their potential for S2S applications.
Land Surface and Biogeochemical Models
The land surface model (LSM) accounts for the land-atmosphere interactive processes, such as the exchange of heat, moisture, and momentum at the surface. As described in the Observations section of this chapter and in Chapter 4, such fluxes influence the
likelihood of heat waves, droughts, storm formation, and monsoons and may become increasingly important to climate and weather prediction as the global climate warms (e.g., Dirmeyer et al., 2013, 2014). Despite the ever-growing number of dynamic LSMs, a recent intercomparison has highlighted that the performance of dynamic LSMs is still in some cases inferior to much simpler statistical models for sensible heat flux (Best et al., 2015)
Another important purpose of LSMs is to model surface hydrology, where groundwater and streamflow are included to connect terrestrial water (e.g., soil moisture, surface water, and snowpack) with rivers, lakes, and oceans to complete the water cycle. LSMs are often deeply rooted in biogeochemical processes (e.g., carbon and nitrogen cycling and other ecosystem processes) because of the fundamental interactions of vegetation and soil systems with surface hydrology. Coupling between land surface hydrology and the ocean can be important for determining near shore currents and salinity and for ocean biogeochemical cycles. Indeed, coastal ocean salinity can be strongly determined by river discharges, particularly during flood events and seasonal flooding (Milliman and Farnsworth, 2013).
The LSMs in NWP systems typically focus on dynamically representing snow cover and soil moisture, while prescribing vegetation cover to vary seasonally based on satellite observations.22 LSMs in ESMs today usually also predict vegetation at some level (Bonan, 2008, and see below), which permits a greater degree of interaction with the hydrologic cycle and biogeochemical cycling—both of which have significant societal impacts on S2S timescales (Chapter 3).
Representation of surface hydrology is still often relatively simplistic in ESMs used for S2S forecasting, with water runoff not collected and moved through rivers to coastal areas. Many more complex hydrologic modeling systems exist with river routing and drainage basin models layered atop land surface models, but they are typically run “off line” and are driven by climate and weather forecasts from coupled models. These models incorporate the influence of human water management and use on surface and groundwater storage and river streamflow. Systems are being actively developed and used for operational hydrologic forecasting (e.g., within NOAA’s NWS and Office of Hydrologic Development, see also Yuan et al., 2015). Although further research is needed to understand the extent to which inclusion of such hydrological models within coupled S2S forecast systems would benefit S2S forecasts across the system (e.g., by explicitly informing coastal salinity and currents), such coupling would enable more direct, dynamical S2S predictions of stream and river flow as well as coastal
___________________
22 See for example, specifications associated with the LSM used in NOAA’s Global Forecast system: http://www.emc.ncep.noaa.gov/GFS/doc.php#lansurproc, accessed January 27, 2016.
flooding and hypoxia. Furthermore, the potential user base for such S2S hydrologic predictions is large (Chapter 3). Enabling and supporting the coupling of hydrologic and river routing models to climate and weather models is a strategic science goal of NOAA’s Office of Hydrologic Development (NOAA, 2010).
Whether or not they include hydrologic processes such as river routing, LSMs in coupled S2S forecast systems must continue to be improved through higher fidelity and increased complexity in order to represent important coupled processes in S2S forecast systems and also to meet increasing user needs for hydrologic, ecological, littoral, and coastal ocean S2S predictions. This includes (but is not limited to) improving the parameterization of surface energy partitioning into sensible, latent, soil, and outgoing longwave radiation through improved plant and soil processes, snow/soil-ice physics, and inclusion of biogeochemical cycles. Land-atmosphere interactions (see Figure 5.12) also must be carefully evaluated and considered, in particular feedbacks with surface and boundary-layer physics, convection, and water and energy budgets (Chapter 4). This needed progress in land and hydrological model development is slowed by lack of reliable observations and climatology estimates. Process-level studies and significant efforts in model optimization (including parameter estimation) will be necessary to continue to improve the LSM component of coupled S2S prediction systems.
Land surface models used for S2S prediction also need to improve treatment of the hydrological cycle and aspects of the land surface that are coupled to hydrology. Effort is needed to incorporate surface and underground water storage and river routing in models, including the role of human water management and use. These important aspects of the land system have been implemented in off-line hydrologic forecast systems, but they are usually oversimplified or neglected altogether in fully coupled S2S forecast systems.
Finding 5.28: Advancements in modeling and parameterization of land processes and feedbacks is important for improving S2S prediction model skill, especially for events such as droughts, heat waves, floods, monsoons, and storm formation, as well as for improved hydrological predictions.
Biogeochemical processes in ESMs extend beyond the land surface to include ecosystems in the ocean and sea ice, and geophysically important reactive chemistry, aerosols, and aerosol-cloud interactions in the larger Earth system. As highlighted in Chapter 3, biogeochemical-related events that are modeled in LSMs and ESMs that are desirable to predict on S2S timescales include ocean and large-lake hypoxia, fish stocks, marine productivity, harmful algae blooms, crop yields, disease epidemics,
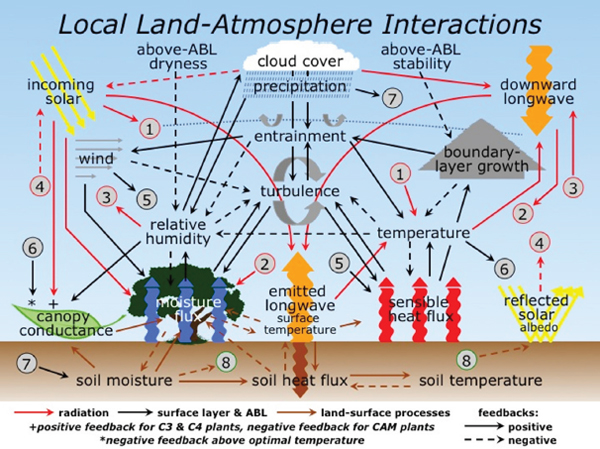
and fire occurrence. For S2S prediction, it can be desirable to predict, as opposed to prescribe, certain parts of biogeochemical cycles that influence predictability and/or involve societally relevant impacts. A volcanic eruption is an example of a biogeochemically relevant event that influences both chemical and physical systems, via the formation of volcanically derived aerosols, which in turn force an atmospheric and/or ecosystem response. A volcanic eruption is an unanticipated event with consequences on regional to global scales whose evolution and outcomes on S2S timescales are addressed as a key prediction need in Chapter 6.
Coupling biogeochemical dynamics to other ESM components may also be important for S2S predictions of the atmosphere because biogeochemical dynamics can influence albedo, moisture availability, and temperature profiles on S2S timescales. For
example, it is increasingly recognized that initializing and representing vegetation can also impact S2S predictability of the atmosphere (e.g., Koster and Walker, 2015). Whether physical and biogeochemical models should be coupled or uncoupled—with the biogeochemical model run offline and on demand due to the vast input data requirements of accurate biogeochemical modeling in a turbulent fluid—depends on the timescale on which land and ocean biota feedback to the physical models.
Global climate models began to include a wide array of biogeochemical cycles in the past two decades, and model terminology has evolved to reflect this new capability. Today, a global climate model that includes biogeochemical cycles is often called an ESM. Carbon vegetation modeling usually involves predicting the leaf area and treating leaf processes that influence photosynthesis at a minimum and may also allow vegetation growth and decay, competition, and soil carbon pools. The current capability in atmospheric components includes the formation of aerosols, aerosol-cloud interactions, and the evolution of atmospheric composition (e.g., greenhouse gases, ozone, and other pollutants). Biogeochemical modeling in the ocean involves both uptake and release of gases, chemical reactions, and biology from the single-celled (algae and bacteria) to multicellular phytoplankton, zooplankton, and sometimes even seaweed and fish. ESMs have generally not yet incorporated biogeochemical cycling in sea ice. However, there is active development in a few models to include sea ice algae, gas exchange, chemical cycling, and soot deposition on sea ice (e.g., Holland et al., 2012; Vancoppenolle et al., 2013).
Finding 5.29: Incorporating biogeochemical cycles into S2S prediction systems has the potential to improve S2S forecasts because biogeochemical cycles often feedback to other components of the physical system and influence societally important concerns such as ocean and large-lake hypoxia, fish stocks, marine productivity, harmful algae blooms, crop yields, disease epidemics, and fire occurrence.
Coupling Between Model Components
As highlighted above, S2S prediction is inherently a coupled problem. Information transfer between the atmosphere, ocean, ice, wave, and land provides fundamental sources of predictability on the S2S timescales. Meanwhile, model errors are also passed between different components, and this error growth represents a consequential limitation to S2S prediction skill. The importance of air-sea coupling, land-air coupling, and sea ice coupling has been fully recognized, but representations of such coupling in models still need substantial improvement.
Several types of coupling are priorities for implementation or improvement in S2S operational systems. Ocean surface waves are needed as a buffer between atmospheric momentum and ocean currents. Precipitation arriving at a catchment basin and delivered to the coastal ocean via an estuary through river routing requires hydrological and land surface models that are coupled to atmospheric and ocean models. Other examples include biogeochemistry models coupled with ocean and land and atmospheric models that include biogeochemical feedback on S2S timescales. Reliable couplers need to be designed based on advanced knowledge of coupled processes with an aim to matching observed fluxes where measurements are available. These processes are often not resolved explicitly in S2S models and need to be parameterized.
Because changes in parameterization in one component can lead to increased model errors in another part of the coupled system, coordination and collaboration among different communities of researchers focused on different parts of the Earth system is important in this context.
Finding 5.30: Because of the coupled nature of S2S variability and prediction, parameterization for either interactive processes within individual components of the Earth system or coupled processes between them must be improved in a cohesive manner instead of in isolation.
Process Studies for Model Advancement
As discussed earlier, reducing model errors is among the highest priorities for advancing S2S forecast systems. Major sources of model errors are parameterization schemes for unresolved, poorly understood, or computationally burdensome processes across all model components (i.e., atmosphere, ocean, sea ice, and land surface). Developing and refining parameterization schemes can be achieved through three closely connected steps: observing physical processes in the real world, improving understanding of these physical processes, and translating that new knowledge into improved models.
Field Observations
As model resolution continues to increase toward cloud- and eddy-permitting or -resolving scales (similarly for resolving sea ice floes and fracture heterogeneity, watersheds, mesoscale and stand scales in hydrology and land ecosystem modeling), more detailed information of physical processes is needed to develop a new breed
of parameterization. It is important to recognize that field observations for process studies are different from sustained observations for climate and applications monitoring (e.g., Observations section of this Chapter), although some data sets may meet both purposes. Observations for improving parameterizations are most often taken from special field experiments that include ground-based, seaborne, and airborne in situ, along with space-based remote measurements.
In situ measurements are the most reliable sources of information for many physical processes central to model parameterization (e.g., cloud, precipitation, radiation, turbulence, aerosol, soil moisture, vegetation, surface waves, and surface fluxes of land, ocean, and ice) and the only sources of information for subsurface oceanic processes (e.g., mixing and currents). Modern technology affords observations of these processes with ever-increasing details and accuracy to meet the need of developing parameterization schemes. Moreover, in situ observations provide the most accurate descriptions of coupling or interaction among the multiple processes that must be adequately represented in models to advance S2S prediction. Processes-level observations must take the full advantage of the most advanced technology, including seaborne, airborne, and land-based autonomous devices.
Space-based data provide global and routine coverage, augmenting the limits of temporal and spatial coverage inherent in field observations. Products with reliable vertical profiling of the atmosphere, information of ocean and land surfaces, and higher sampling rates by multiple sensors are the best complements to in situ observations for process studies. More specifically, there are key physical processes for which experimental satellite observations are sorely needed to characterize processes critical to modeling S2S phenomena (e.g., deep convection, soil moisture, ocean mixed-layer depth). Key among these are information on vertical motion within storm systems, increased thermodynamic and wind information within the boundary layer, and simultaneous measurements of aerosol, clouds, and precipitation to better describe cloud/precipitation growth. In this regard, and with the expected increases in resolution of models in mind, it is essential that these types of space-based measurements are able to resolve mesoscale features of the atmosphere.
Field experiments targeting a single process (e.g., cloud ice, ocean mixing) with single observing platform (e.g., an airplane, a ship) have effectively improved many individual parameterizations and should continue. S2S prediction systems include coupled components of Earth, and their skill can be dramatically improved only when all model components and their coupling are advanced. Indeed global models have evolved to a stage that errors are unlikely due to deficiencies in representing a single process. Such coupled processes can be adequately observed through field experiments with
sufficient breadth to cover multiple processes across more than one component of the Earth system. Past success stories of coupled experiments with lasting and broad impact all involve multiple observing platforms and international participations. Examples are the GARP (Global Atmosphere Research Program) Atlantic Tropical Experiment (GATE; Houze and Betts, 1981), the Tropical Ocean Global Atmosphere Coupled Ocean-Atmosphere Response Experiment (TOGA COARE; Webster and Lukas, 1992), Surface Heat Budget of the Arctic Ocean (SHEBA; Uttal et al., 2002), the African Monsoon Multidisciplinary Analysis (AMMA; Lebel et al., 2010), and the VAMOS (Variability of the American Monsoon Systems) Ocean-Cloud-Atmosphere-Land Study Regional Experiment (VOCALS-REX; Wood et al., 2011) (see Appendix C for more details on past and current major coupled field campaigns). Common to these and other successful process studies is that they all address coupling or interaction between various processes within the same components of the Earth system and interactive processes between different components of the Earth system (i.e., land, ice, atmosphere, and ocean). Field experiments of that scale are expensive and logistically challenging, but their data are singularly beneficial to model development (e.g., Fairall et al., 2003; Park and Bretherton, 2009).
Finding 5.31: Specialized and comprehensive field observations are necessary to inform and improve representations of unresolved processes, including coupled processes in and between various components of S2S prediction models. New observing technology, both remote sensing and in situ, and international collaboration/coordination could enhance the ability to meet the demand for more detailed information on interactive and coupled processes within S2S models.
Transforming Understanding of Physical Processes to Model Improvement
Field observations provide the foundation for new knowledge of interactive processes key to S2S prediction. However, the tremendous knowledge gained from many field observations has helped more to diagnose sources of model errors than to actually reduce these errors. One reason for this is the distance between what model developers need and what can be observed. For example, many cumulus parameterization schemes depend on vertical mass fluxes in clouds, and as mentioned above, these are very difficult to observe. In this case and in many others, advancing observing technology is critical to shorten the distance between what is needed and what is currently observable. Meanwhile, fully tapping the rich information from existing field observations for model development requires knowledge of observing technology by modelers and of modeling by observation experts. Thus transforming new knowledge from
observations into model improvement requires collaborative and persistent efforts by teams that include observationalists, data analysts, and modelers. For the longer (climate) timescales, the NSF/NOAA CPTs have been highly successful in developing improved parameterizations. Further support for this and similar efforts, including staff and computing time, is critical for transferring knowledge gained through process studies into actual improvements in parameterizations (see also Chapters 6 and 7).
Given the nature of field observations—namely limited coverage in space and time—it is naïve to expect a single field experiment to lead to a breakthrough in model development and S2S prediction. Each field experiment fills a gap in the in situ observational database, but it is the totality of all field experiments together that provides the needed information for overall improvement for S2S systems. Because it is impossible to have detailed process observations at all desired locations and time, an approach of integrating field observations and high-resolution modeling is essential to bridge the gap between field data and improvement of model parameterization. As discussed earlier, global and large-domain cloud-permitting and non-hydrostatic ocean models that are well calibrated and validated by field observations serve as vital tools for transforming knowledge gained from field observations to model improvement. Large-eddy simulation (LES) models provide additional details, such as shallow clouds and ocean internal waves.
Finding 5.32: Transforming field observations to model improvement requires persistent collaborations among experts with knowledge of observations, data analysis, and modeling who can effectively integrate field observations and modeling for model improvement.
The Way Forward for Advancing S2S Models
In current forecast systems, model errors are one of the most limiting factors in achieving the skill that might be afforded by S2S Earth system predictability. Many of the issues that lead to model errors are common across different modeling systems and a broad range of timescales covering days to centuries, that is, across weather forecasts, S2S forecasts, and long-term climate simulations. These model errors are likely the result of multiple deficiencies in model representations of key processes that are currently parameterized. Investment in research aimed at understanding and reducing model errors is absolutely essential in improving S2S predictions. Because of the commonality across timescales of many Earth system model errors, a seamless framework for reducing such errors and developing new parameterizations may be useful (see Box 5.2 for a description of seamless prediction).
More efficient computational schemes would benefit S2S forecasts as well as weather, ocean, and climate forecasts. Advances in S2S systems can benefit tremendously from the experience of weather, ocean, and climate model developers, and vice versa. New high-order computational schemes and implementations that minimize numerical diffusion on S2S timescales are needed for multiresolution ocean and atmospheric modeling. Developing these computational schemes jointly with new uncertainty quantification and DA capabilities would be an efficient path forward: It would directly integrate three critical components of S2S forecasting systems from the start.
Several crucial steps need to be taken in parallel to reduce model errors. First, research to systematically quantify and understand the improvements that can be made through modest increases in resolution (e.g., horizontal, vertical, and multi-resolution, and across coupled components) is needed to help determine the optimal design of operational systems (e.g., trade-offs between costs and benefits of increased resolution, ensembles, parameterizations, and multi-models—see Recommendation J described in the next section). For ocean models in particular, there may be benefit for including robust, advanced, and highly conservative multi-resolution approaches (e.g., adaptive mesh refinement, seamless two-way nesting, multi-dynamics, adaptive super-parameterizations) for operational global S2S forecasting over the next decade. Some emerging research further suggests that there may be important gains from concurrent increases in resolution up to the point of resolving mesoscale processes across the atmosphere, ocean, sea ice, and land surface. However, research into how increased resolution can reduce model biases, especially in coupled ESM models, is just beginning and requires further support (e.g., NOAA, 2015). Ideally, continued research on the topic of model resolution should be carried out with more than one S2S forecast system to ensure that the lessons learned are generic.
Second and perhaps most importantly, it is clear that uncertainties in parameterizations of unresolved processes—both processes internal to a given Earth system component and in the representation of coupled processes between them—are and will continue to be major sources of model errors. Thus efforts to improve parameterization of many processes must be one of the highest priorities for improving S2S prediction systems. The difficulties in improving parameterization arise from both incomplete process understanding and failure to properly encapsulate process knowledge into parameterization schemes of operational S2S systems. Acceleration of both process understanding and the transfer of knowledge into model development are thus essential.
New field observations are critical to improving process understanding and the development of subgrid-scale parameterizations. Given the complexity of S2S models, which involve multiple, interacting components of the Earth system, it is critical to understand coupling processes between different components as well as interactive processes within components. Particular foci for new field campaigns and process studies should include tropical convection, ocean turbulence, sea ice, stratospheric and land surface processes, and coupling among different Earth system components (i.e., land, ice, ocean, and atmosphere). Observations of coupled processes between components are particularly useful for monitoring and initializing S2S prediction systems. They are also essential for model validation and the identification of bias/error sources in coupled ESMs. Spatial coverage of this type of observation (e.g., tropical mooring arrays, land surface flux towers) remains inadequate and faces deterioration. To maximize impact, research and operation communities need as far as possible to collaborate in the design of future field observations and to take full advantage of new observing technology and opportunities for international collaborations and coordination.
Transforming new knowledge gained from field observations and process studies to model improvement requires close collaboration among experts on observations, data analysis, and modeling. Persistent and painstaking efforts among two generations of scientists has been necessary to advance ESMs and operational forecast systems to the point at which they are today, and it will take no less to reach our goals for S2S forecasting. Teams that allow scientists with diverse expertise to collaborate effectively are necessary to accelerate this transformation (such as NSF/NOAA CPTs), and it is crucial to further develop an enhanced, sustainable community of scientists spanning academic, research, and operational centers to develop, test, and optimize new parameterization schemes (see also Chapter 6).
Finally, improving subgrid-scale parameterization needs to be supported by research that explores the benefits of extremely fine resolutions (meters to a few kilometers),
even though these are unlikely to be affordable or computationally feasible operationally in the next 10 years. For atmosphere models, this would involve global or large-domain cloud-permitting grid spacing without the need of deep cumulus parameterization and regional LES models without the need of shallow cumulus parameterization. For ocean models, this would include explicitly representing submesocale features and possibly nonhydrostatic processes such as wave-induced circulation and mixing. The development and exploitation of such extremely high-resolution model systems should be encouraged, and they should be used to advance the study of S2S predictability (Chapter 4), generate high-resolution data sets for process studies, and provide testbeds to improve, develop, and evaluate parameterization schemes, as well as demonstrate possible future S2S prediction systems (see also Recommendation I).
Recommendation H: Accelerate research to improve parameterization of unresolved (e.g., subgrid-scale) processes, both within S2S system submodels and holistically across models, to better represent coupling in the Earth system.
Specifically:
- Foster long-term collaborations among scientists across academia and research and operational modeling centers, and across ocean, sea ice, land, and atmospheric observation and modeling communities, to identify root causes of error in parameterization schemes, to correct these errors, and to develop, test, and optimize new (especially scale-aware or independent) parameterization schemes in a holistic manner.
- Continue to investigate the potential for reducing model errors through increases in horizontal and vertical resolutions in the atmosphere and other model components, ideally in a coupled model framework (see also Recommendation L).
- Encourage field observations targeted at increasing knowledge of poorly understood or poorly represented processes in S2S models, including tropical convection, ocean mixing, polar, sea ice and stratospheric processes, and coupling among different Earth system components (e.g., air-sea-ice-wave-land, troposphere-stratosphere, dynamics-biogeochemistry).
- Develop extremely high-resolution (or multi-resolution) modeling systems (e.g., that permit atmospheric deep convection and nonhydrostatic ocean processes) to advance process understanding and to promote the development of high-resolution operational prototypes (see also Recommendation I).
Representing oceans, sea ice, land surface and hydrology, and biogeochemical cycles (including aerosol and air quality) in coupled ESMs is more important for S2S predic-
tions than for traditional weather prediction because much of the predictability of the Earth system on these timescales arises from conditions outside the troposphere or from interactions between Earth system components. However, the representation of processes outside the troposphere has generally been less well developed in ESMs used for making S2S forecasts. Thus improving model representation of land surface and terrestrial hydrology, ocean, sea ice, and upper atmosphere—including fluxes and feedbacks between these components and the troposphere—should be central to the S2S research agenda. For example, improving the representation of land surface processes such as soil moisture storage and snow may be important for predicting events such as heat waves, cold surges, storm formation, and predicting runoff may help to enable S2S forecasts of flooding and lake and coastal hypoxia. Similarly, connecting advances in cutting-edge sea ice models (including sophisticated physics representations of ice-thickness distribution, melt ponds, biogeochemistry, and divergence/convergence, as well as new methods to account for wave-floe interactions, blowing snow, and ice microstructure) with sea ice models used in an S2S forecast system could advance S2S predictions of the atmosphere through improved representation of radiative and ocean feedbacks, as well as advancing S2S prediction of sea ice and polar ocean conditions. As demand grows for forecasts of phenomena that are predictable on S2S timescales but that do not feed back strongly to the atmosphere, improving the dynamical representation of many of these Earth system processes in S2S prediction systems may also become important in its own right.
As coupled systems become increasingly complex and the linkages between variables expand, the uncertainty in coupled model output increases, particularly for downstream products. Understanding the nonlinear ways in which these uncertainties can interact should be a key area of focus. Utilizing recently developed reduced-order methods described above, which predict and quantify uncertainty across models directly using model equations themselves, would thus be useful (Smith et al., 2014).
Beyond advancing the representation of the land surface, hydrology, stratosphere, sea ice, ocean, and biogeochemical models and translating these advancements to the Earth system models used for S2S forecasting, efforts are needed to pave the way toward global cloud-/eddy-resolving atmosphere-ocean-land-sea ice coupled models, which will one day become operational for S2S prediction. Although this goal is unlikely to be reached in the next decade, revolutions in the computing industry may shorten the distance between now and the otherwise long way to go, and the S2S research community needs to be proactive and poised if/when that happens. Substantial research is needed in several specific areas to ready global cloud-/eddy-resolving models for operation. First, models’ dynamic cores must be made more efficient to take advantage of new computer technology (Chapter 7). Second, new parameter-
ization schemes needed at cloud-/eddy-resolving resolutions must be advanced. Third, probabilistic predictability on cloud-/eddy-resolving scales would be different from that based on models of coarse resolutions, especially for some extreme events, which require additional studies. Finally, cloud-/eddy-resolving (or permitting) models will not replace the need for multi-model ensembles (MMEs). Considering the huge demand on computing capability, cloud-/eddy-resolving MMEs must be approached through international collaboration and coordination.
Recommendation I: Pursue next-generation ocean, sea ice, wave, biogeochemistry, and land surface/hydrologic as well as atmospheric model capability in fully coupled Earth system models used in S2S forecast systems.
Specifically:
- Build a robust research program to explore potential benefits (to S2S predictive skill and to forecast users) from adding more advanced Earth system components in forecast systems.
- Initiate new efficient partnerships between academics and operational centers to create the next generation model components that can be easily integrated into coupled S2S ESMs.
- Support and expand model coupling frameworks to interoperably link ocean-atmosphere-land-wave-ice models for rapid and easy exchange of flux and variable information.
- Develop a strategy to transition high-resolution (cloud-/eddy-resolving) atmosphere-ocean-land-sea ice coupled models to operations, including strategies for new parameterization schemes, DA procedures, and MMEs.
COMBINATION, CALIBRATION, VERIFICATION, AND OPTIMIZATION OF S2S FORECAST SYSTEMS
As discussed in previous sections, there will always be uncertainties in observations that are used to initialize S2S systems and in the parameters and equations used to represent processes. The net result is bias and errors in the forecast. Significant effort has gone into reducing systematic model errors and biases in Earth system prediction systems, and these efforts must continue in order for S2S forecasts to advance. However, uncertainties in initial conditions and model formulations are certain to remain for the foreseeable future. This necessitates the careful assessment of uncertainties and efforts to account for them (e.g., ensemble prediction and other methods of uncertainty quantification) and statistical post-processing to adjust forecasts so that
systematic biases are reduced (calibration). Both are essential for improving the reliability and skill of S2S forecasts, and along with efforts to improve forecast verification, are critical to advance.
This section highlights some recent advances and challenges in improving forecast skill through ensemble forecasting and calibration. It also covers technical aspects of forecast verification—the process of comparing forecasts with observations in order to test forecasts’ reliability, measure their skill, assess their value, and develop bias corrections. Given the range of possible methods and options for improving forecast skill through such techniques, this section also discusses the optimization of forecast systems through an exploration of costs and benefits of various forecast system configurations.
Accounting for Uncertainty to Improve Probabilistic S2S Forecast Reliability and Skill
As briefly discussed in Chapter 2, a notable strategy for advancing the skill and utility of S2S forecasts in the past few decades, apart from efforts to reduce model errors, has been the inclusion of quantitative information regarding uncertainty (i.e., probabilistic prediction) (e.g., Dewitt, 2005; Doblas-Reyes et al., 2005; Goddard et al., 2001; Hagedorn et al., 2005; Kirtman, 2003; Palmer et al., 2000, 2004; Saha et al., 2006, among many others). This change in prediction strategy naturally follows from the fact that climate variability includes a chaotic or irregular component and therefore forecasts must include a quantitative assessment of this uncertainty. More importantly, the prediction community now understands that the potential utility of forecasts is based on end-user decision uptake and utilization (Challinor et al., 2005; Morse et al., 2005; Palmer et al., 2000), which requires probabilistic forecasts that include quantitative information regarding forecast uncertainty or reliability.
Ensembles of perturbed initial observational values are now commonly used to represent uncertainty associated with model initial conditions; however, the number of ensembles and the method of ensemble creation vary widely across operational systems (Appendix B, Tables B.1 and B.2). Little systematic work has been done to evaluate the costs and benefits of different ensemble sizes and methods in relation to other investments.
In addition to uncertainty in initialization, uncertainty quantification is also necessary to account for uncertainty associated with model formulation. A number of methods exist or are under development to attempt to account for this type of uncertainty. Perturbed physics ensembles (currently in use at the Met Office for their operational
system) or stochastic physics (e.g., Berner et al., 2008, 2011) appear to be quite promising for representing some aspects of model uncertainty (e.g., Weisheimer et al., 2011, and see section above on Data Assimilation).
The MME approach, in which forecasts are made from an ensemble of separate models, has been the most widely tested and implemented of such methods. As also discussed in Chapter 2, a number of routine MME S2S forecasts are currently issued: The Canadian Meteorological Centre has been producing operational MME seasonal forecasts using two coupled models since 2011.23 Seasonal MME forecasts are also being produced at the Asia-Pacific Economic Corporation (APEC) Climate Center (APCC) every month based on data collected from 17 operational centers and research institutions (see Box 2.1). The North American Multi-Model Ensemble (NMME-2) is quasi-operational on the seasonal scale, and planning for subseasonal capabilities is beginning (see Box 2.2). Forecasts from these and other MMEs, which include multiple operational and/or research models, generally achieve a better skill and reliability than do individual models (Doblas-Reyes et al., 2009; Kharin and Zwiers, 2002; Kirtman, 2014; Kirtman et al., 2014; Krishnamurti et al., 2000; Min et al., 2014; Palmer et al., 2004; Wang et al., 2009c; Weigel et al., 2008; Weisheimer et al., 2009), although in some cases, only marginal skill improvement has been achieved when verifying the ensemble mean (e.g., Doblas-Reyes et al., 2000, 2009; Weisheimer et al., 2009).
The precise reasons for these improvements in skill are not totally clear, but when separate prediction systems are combined into a single prediction system of systems, model-and data-induced errors or uncertainty tend to cancel out, which improves the overall probabilistic distribution of likely outcomes (Doblas-Reyes et al., 2005; Hagedorn et al., 2005; Palmer et al., 2004, 2008). Different model configurations, along with different parameterizations and physics likely both play a role in this reduction of error: forecast models in different operational centers and institutions have different configurations (e.g., resolutions, physics parameterization schemes, strategies for initialization, ensemble, coupling, and retrospective forecasts). MME forecasts likely cover a more complete probability distribution than a single model because of these different configurations and also because different models tend to have their own strengths in capturing different sources of predictability. Thus forecast skill improvement may also come from combination of different signals.
Despite their current value and future promise for further improving S2S forecasts, there are a number of important gaps in our understanding of MMEs and how to assemble them strategically. Currently, MMEs are largely systems of opportunity, not
___________________
23http://weather.gc.ca/saisons/index_e.html, accessed January 27, 2016.
systems made through careful design (Sandgathe et al., 2013). Furthermore, tradeoffs exist between developing independent multiple models and focusing resources on one system, including focusing on other methods of capturing uncertainty associated with model formulation. A further challenge for MMEs is how to combine models with unequal skill (Sandgathe et al., 2013). Different methods have been used to combine MMEs for deterministic and probabilistic forecasts, including simple averaged MMEs where the contribution of each model is equally weighted and empirically weighted MMEs using multiple linear regressions. The relative skill of forecast models can also be used to weight the contributions of each model to the multi-ensemble, either point by point or over larger regions. The choice of method may depend on parameters, locations, and applications. For example, Kharin and Zwiers (2003) found that for 500-hPa geopotential height forecasts, the simple ensemble mean produces the most skillful forecasts in the tropics, whereas the regression-improved ensemble mean performs best in the extratropics, and the MME forecast that is obtained by optimally weighting the individual ensemble members does not perform as well as either the simple ensemble mean or the regression-improved ensemble mean. In the case of the APCC MME (Box 2.1), products are generated using a number of methods, including simple equal weight for all members, empirically weighted coefficients, and probabilistic forecast. In this case, simple averaged MMEs generally outperform MMEs of other weighting methods over most latitudinal zones for all variables and seasons (Min et al., 2014).
Finding 5.33: Although perturbed physics and other methods continue to be studied and implemented, given current modeling capabilities, a multi-model strategy is a practical and relatively simple approach for quantifying forecast uncertainty due to errors in model formulation, although optimal methods for combining models are not always clear, and MMEs will not fully account for forecast uncertainty.
Calibration of S2S Probability Forecasts
Calibration is a post-process that uses statistical methods based on discrepancies between past forecasts and observations to adjust ensemble forecasts and improve forecast skill. Today, all operational S2S models include a number of ensemble members whose individual forecasts can be arranged to estimate probability distributions for the predicted variables, point by point across the forecast grid. However, in their original form, the statistical characteristics of S2S forecasts often differ from those of the environmental features they attempt to predict. The aim of calibration or post-processing of model output is to remove these systematic errors and to reshape the
predicted probability distribution so that it resembles as closely as possible the distributions that will be found when the forecasts are verified.
Calibration processes are developed by comparing forecasts made with the current prediction model to actual observations for as many cases as possible over a historical period (retrospective forecasts or “reforecasts”), usually 10 to 30 years for S2S forecasts. The comparison produces statistical information that is used in calibration algorithms to ensure that the long-term statistical moments (e.g., mean, variance, spread) of the forecast at any given lead time match the long-term observed statistical variability. Some calibration methods are based on the Bayesian model averaging approach proposed by Raftery et al. (2005), including those described by Dutton et al. (2013). Other methods focus on more direct adjustment of variances, including those of Doblas-Reyes et al. (2005) and Johnson and Bowler (2009). S2S ensembles are often under-dispersive, and the calibration methods usually amplify the variance to correspond more closely to the observed variance.
Statistical-dynamical (S-D) techniques, for example, model output statistics (MOS), can be very beneficial for improving model calibrations where the models cannot capture all the processes that are occurring. For example, the tropical cyclone forecast community has used S-D techniques for a number of years, where the dynamics involved in hurricane track and intensity are not completely understood. Analog techniques have shown fewer uses but may have value in helping to capture uncertainty, potentially reducing model retrospective forecast requirements and reducing or eliminating the need for additional models (Hamill et al., 2006).
In practice, the calibration of S2S forecasts is not a well-organized process, and no single approach works best for all applications. The forecast centers provide the forecasts and corresponding retrospective or historical forecast sets and frequently provide some calibration. Commercial providers or other users also often compute and apply their own calibrations in order to enhance skill or target specific applications.
Looking forward, as more of the components of the Earth system are included in the models, the challenges of model calibration will intensify—due at least in part to the need for more comprehensive and long-record observations across components of the Earth system. The atmospheric, ocean, land, and ice models evolve toward their own model climate and do not necessarily combine and converge on the actual Earth system climate. For example, as mentioned earlier in this chapter (Figure 5.7), SST errors in coupled model simulations with the UK Met Office model grow rapidly. Identifying model error and compensating for model tendencies will continue to be a key activity in S2S model development and operation.
Finding 5.34: Calibration of S2S probability forecasts is a critical process in preparing the forecasts to serve users. Forecast centers, private-sector users, and value-added providers use various calibration methods, but there has been no comprehensive effort to compare methods or to find optimum approaches for the variables of most interest. Ascertaining whether some methods offer clear advantage over others would be useful.
Verification of Forecasts and Metrics of Model Skill
Proper verification of forecasts is critical to all aspects of model improvement, system design, ensemble configuration, and the determination of use and value by decision-makers. A variety of options exist for verifying and estimating the skill of S2S probability forecasts. Some are related to atmospheric or oceanic phenomena and some to quantities of interest to users such as the financial consequences of hedging when adverse conditions are predicted. A standard approach is to estimate model skill through anomaly correlations or root-mean-square errors of common meteorological variables such as temperature and precipitation (see Figure 2.4). Although such metrics have been used for decades, they provide only a limited view of forecast skill. They are traditionally carried out on a grid-point-by-grid-point, variable-by-variable basis and do not provide a comprehensive picture of model or forecast skill (Brown et al., 2002, 2004).
Significant recent research has been devoted to improved verification techniques, targeted mainly at very high resolution mesoscale predictions and also at ensemble predictions (Gilleland et al., 2010), yet significant research opportunities exist for improving verification beneficial to S2S prediction. For S2S prediction, as in mesoscale prediction where predictability limits are an issue (e.g., thunderstorms or tornadoes), the opportunity exists for feature-based prediction in which skill is measured not on a grid-point by grid-point basis, but on the basis of predicting larger features (e.g., ENSO, MJO, NAO, warm SST pools, sea ice extent) within the Earth system (Cornuelle et al., 2014). In other words, although model skill in predicting surface wind 1 to 3 months in advance may be lacking, as discussed in Chapter 2, certain structures and indices are predictable at these timescales and have verifiable attributes using newer object-oriented, feature verification techniques (Gilleland et al., 2010). These techniques have only recently been extended to ensemble prediction (Gallus, 2010; Johnson et al., 2013) and potentially provide a means for credible verification of feature skill for S2S predictions.
Successful prediction and verification of S2S “features” also leads to a two-step process of prediction and verification where successful prediction of a “feature” can be correlated to a likely environmental event for a user, for example, strong ENSO leads
to increased rainfall in California by shifting the location of the subtropical jet and tropical flow of moisture further east (WMO, 2015a). However, location, areal extent, and intensity of the SST anomaly determine the location and intensity of rainfall. Potentially, using feature-based verification as an example (Box 5.3), this could be refined to correlate intensity and location of ENSO anomalous SST to more refined watershed regions of rainfall. Clearly, predictability limits are a factor here; however, there is significant user value if, through proper verification, accurate probabilities can be assigned to user-critical events or thresholds.
More challenging is the verification of forecasts of rare events at S2S timescales (Hitchens et al., 2013). Credible reanalysis or retrospective forecast history is limited to approximately 40 years, providing a small sample for verification of long-range predictions of extreme or rare events. Techniques for verifying ensemble predictions of rare events are being explored (Gneiting and Ranjan, 2011); however, longer data records are required to provide credible validation and verification.
Finding 5.35: Aggregating observations into features or indices provides added S2S predictability. Feature-based or object-oriented verification, especially ensemble
feature-based verification, should be pursued for S2S to support Earth system model development and forecast calibration and validation.
Finding 5.36: Two-step verification correlating a feature, index, or object to a user-valued event shows promise for extracting useful signal at the limits of predictability.
Research to develop feature-based verification techniques will be important, but it is important to not forget that verification metrics are a critical part of building trust in the use of forecasts and that the effective design of metrics can help to direct model development toward enhancements in skill that are most beneficial to decision-makers (Hartmann et al., 2002; Morss et al., 2008; Pagano et al., 2002). There is a need to develop verification metrics that are more closely associated with user needs and desired forecast products, such as quantities that may be more directly used by the energy, transportation, hazard, water, and agriculture sectors, among others. There is also a need to develop common S2S-specific forecast skill metrics to target core physical characteristics of the forecast that are particularly relevant to S2S processes and timescales (e.g., SST, sea ice thickness, upper-level atmospheric flow, soil moisture, upper ocean heat content, in addition to indices of S2S relevant modes of variability). A community-wide effort will thus be needed to develop skill and verification metrics that will build user trust while driving the development of S2S forecast systems in directions that are most beneficial to society. An understanding of the different ways in which users interpret forecasts and what they consider to be skillful is clearly necessary to inform the types of evaluation metrics that will influence use of forecasts (see Chapter 3). When developing such common skill and verification metrics, attention must also be paid to ensuring that such metrics reflect appropriate and optimal combinations of spatial and temporal averaging as the lead time increases from weeks to seasons. Thus, developing this range of verification metrics/diagnostics targeting S2S forecast skill improvements, dissemination, and monitoring will require input from, and dialogue among, the operational, research, and stakeholder communities (see also Chapters 3 and 6). In some cases, forums for such a dialogue already exist. For subseasonal prediction, for example, the S2S Project has begun a process to develop common and community-accepted verification and process-oriented skill metrics for forecast systems.
Finding 5.37: Increasing the skill of S2S forecasts through improved and expanded representation of the physical system and expanding the utility of S2S forecasts will require collaboration among operational, research, and stakeholder communities to develop common S2S forecast skill and verification metrics, as well as process-oriented diagnostics that target S2S processes and phenomena.
Often decision-makers simply want to know whether they can have confidence in a particular forecast. Should I act on the basis of this forecast? What are the expected consequences if I do? In these cases, effective use of the forecast in decision-making requires quantitative knowledge of historical performance of the forecast system to link predictions with expected outcomes, that is,“If I act on this forecast, then I can expect…” In these cases, a quantitative business model or decision process model based on predicted probabilities will then dictate the appropriate measure of model skill. For example, a simple business model for characterizing the effect of warm or cold seasons on electric utilities demonstrates that the critical model performance statistics for analyzing the impact of forecasts (to mitigate such predicted adverse events) are the climatological and predicted frequencies of such events, along with the fraction of adverse forecasts that are correct (Dutton et al., 2015).
Verification metrics are most useful when decision-makers are involved in their design (see also Chapter 3 and Recommendation B), and for many users the success of the S2S forecasts is directly proportional to the favorable results achieved by acting on the forecast at various predicted probabilities. Knowing whether to act on a forecast requires detailed and reliable statistics about forecast performance that must be obtained from retrospective forecasts. These retrospective forecasts, then, can be as important to effective user decisions as the forecasts themselves.
In most current operational S2S systems, however, there is inconsistency between real-time forecasts and retrospective forecasts in initialization as well as ensemble size (Appendix B, Tables B.1 and B.2). Furthermore, retrospective forecasts are usually initialized from reanalysis, which can be inconsistent with the state-of-art operational analysis used to initialize the real-time forecasts. This is particularly true for the land surface (e.g., soil moisture and snow). Such inconsistency, particularly in initialization and model configuration for real-time forecasts and retrospective forecasts, can generate anomalies with amplitude as large as the signal we want to predict.
Finally, the full probabilistic information contained in the ensemble forecast is essential to decision-making, as emphasized by Dutton et al. (2013, 2015). Anomaly correlations or root-mean-square errors use only one or two statistical moments and may or may not be relevant to decisions to act. The critical question is the extent to which predicted probabilities model the frequencies of occurrence in the verification data.
Thus, in S2S forecasts it is important to convey the associated forecast skill to users along with the forecast itself. In addition to providing data for calibration, retrospective forecasts are used to evaluate forecast skill of the S2S system. It is easier to assess the skill of the forecast system when retrospective forecasts are made with the same fixed version of model and same ensemble number as the forecast. For those systems
performing retrospective forecasts on the fly, the assessment of forecast skill can be more challenging. In these cases, conducting retrospective forecasts with a full set of ensemble members and evaluating the skill once a month could be beneficial. This is true for most of the current operational subseasonal forecast systems.
Finding 5.38: Retrospective forecasts using the current version of the forecast system and up- to-date reanalyses are important for advancing calibration and validation efforts of ensemble prediction.
The Way Forward for Model Calibration, Combination, Verification, and Optimization of User-Focused Skill
A key conclusion of this section is that the value of S2S forecasts is proportional to the success of the users in acting on the forecasts to take advantage of opportunity or to mitigate risk. Thus, the two key components are the forecasts that look to the future and the retrospective forecasts, which inform users what to expect if they act on the forecast. The forecasts’ value also depends on the calibration processes that shape predicted probability distributions to improve the likelihood they will match the verification data. Underpinning this is the need for a credible verification methodology that reflects the aggregation of observations to extend predictability, the spatial and temporal variability of predictability at S2S timescales, and the unique characteristics of MMEs.
The opportunity exists for feature-based predictions with S2S lead times. The community is gaining the ability to predict certain features, structures, or indices (e.g., MJO, ENSO, sea ice extent) at S2S timescales and to have verifiable attributes using newer object-oriented verification techniques, with extensions to ensemble prediction. There is the potential to provide credible verification of feature skill for S2S predictions, which the committee believes is an important direction to pursue.
Recommendation J: Pursue feature-based verification techniques to more readily capture limited predictability at S2S timescales as part of a larger effort to improve S2S forecast verification.
Specifically:
- Investigate methodologies for ensemble feature verification including two-step processes linking features to critical user criterion.
- Pursue verification methodologies for rare and extreme events at S2S timescales, especially those related to MME predictions.
- Consider the benefits of producing more frequent reanalyses using coupled S2S forecast systems to make the initial conditions of retrospective forecasts more consistent with the real-time forecasts, as well as to benefit predictability studies.
Optimization of the Configurations of S2S Forecast Systems
As is clear from the supporting paragraphs above, S2S forecast systems, including the coupled ESM, the reanalysis, and retrospective forecasts, can be configured in a wide variety of ways. Designing and implementing an S2S forecast system to operate within finite computing resources always requires trade-offs between spatial resolution, length of forecast lead times, coupled system complexity, the number of model forecast systems for MME approaches, and the number of ensemble members in each forecast system. Thus, the specifications can vary widely over a configuration space of these parameters.
Today the S2S community has little sense of how forecast performance depends on that configuration (Cornuelle et al., 2014; Sandgathe et al., 2013). In addition to research on reducing model errors through parameterizations, increases in model resolution, and adding complexity in coupled submodels, it would be enormously beneficial to ascertain which configurations can produce optimum forecast systems, as defined by reliable probability forecasts across a wide spectrum of climate variability and Earth system variables and by optimum levels of user-focused skill. Although the focus of this report to this point has been on developing dynamical predictions, such an assessment should also consider the value of lower-order models and analog methods for reducing computational costs while maintaining prediction skill.
This determination of how performance depends on configuration is a central key task in any S2S research agenda. Exploring the configuration space (or “trade space”) of S2S forecast systems will be a large, complicated, and expensive endeavor, expanding as computer and ESM capabilities expand over the next decade or more. Such an experiment would benefit tremendously from a central, coordinating authority, and preferably central funding as well (see discussion in Chapter 6).
This work to optimize system configuration is essential to progress today, but it will also never be complete. New methods for representing physical processes (Recommendation H), new computer capabilities (Chapter 7), and new calibration strategies all will mandate a continued search for trajectories through the model and forecast system configuration space that are most advantageous to improving S2S forecast skill and use.
Exploring the “trade-space” thus represents a major and long-term research effort, undoubtedly distributed through the modeling community, which will provide a foundation for the continuing development and improvement of the operational forecast systems to be considered in the next chapter. In summary, the committee has defined users acting on forecasts as a key metric for measuring S2S success and recommends a continuing search for configurations of S2S forecast systems that will optimize the probabilistic information required by users.
Recommendation K: Explore systematically the impact of various S2S forecast system design elements on S2S forecast skill. This includes examining the value of model diversity, as well as the impact of various selections and combinations of model resolution, number of ensemble perturbations, length of lead, averaging period, length of retrospective forecasts, and options for coupled sub-models.
Specifically:
- Design a coordinated program to assess the costs and benefits of including additional processes in S2S systems, and relate those to benefits from other investments, for example in higher resolution. In doing so, take advantage of the opportunity to leverage experience and codes from the climate modeling community.
- Encourage systematic studies of the costs and benefits of increasing the vertical and horizontal resolution of S2S models.
- Evaluate calibration methods and ascertain whether some methods offer clear advantage for certain applications over others, as part of studies of the optimum configurations of S2S models.
- Explore systematically how many unique models in an MME are required to predict useful S2S parameters, and whether those models require unique DA, physical parameterizations, or atmosphere, ocean, land, and ice components (see also Recommendation L).
This page intentionally left blank.


























































































