
5
DEFECTS, DEFORMATION, AND INTERFACES
INTRODUCTION
The mechanical performance of materials is of central importance for many materials applications. Such applications range from the airframes of aircraft and automobile structures to the interconnects of microelectronic circuits. It has been recognized that defects and the response of defects to internal and external fields dictate in many ways the mechanical behavior of materials. Defects are also important for many other properties of materials such as diffusion, dielectric breakdown, chemical durability, and so on. The evolution of microstructures, described in Chapter 4, is microscopically mediated by defects.
To understand the fundamental characteristics of defects—including point defects, dislocations, and interfaces—materials scientists have turned increasingly to atomistic simulations (Chapter 2). The spatial extent of defects, however, often encompasses both atomic and mesoscopic length scales, making it necessary to include a large number of atoms in these simulations. Therefore, finding an efficient method to deal with these atomic simulation problems is no less a challenge than the one for purely atomistic simulations addressed in Chapter 2. Moreover, the large local distortions associated with point defects, dislocation cores, and interfaces sometimes make it difficult to apply interatomic potentials that were developed under more restricted conditions (for example, nearly constant volume). Therefore, ab initio calculations are preferred for defect problems. At the mesoscopic length scale, it has been customary to impose a boundary condition specifying that the solution match the continuum solution. Such a procedure, however, has not been fully justified and may require more attention in view of the sensitivity of solutions to boundary conditions. Lastly, although the determination of forces and stress tensors from atomic displacement is trivial in these simulations, the inverse problem at both atomic and mesoscopic length scales is ill posed. This ill-posedness, which is common to other applications such as nondestructive testing using scattering waves (described in more detail in Chapter 7), has hindered the application of simulation techniques to these classes of materials problems.
Interfaces viewed as continuum entities with macroscopically defined parameters (for example, free energy per unit area, mobility, and so on) are important in many phenomena treated in other chapters and are discussed in Chapter 3. In the discussion of interfaces in the present chapter, the emphasis is on the way in which geometry, interatomic potentials, and entropy combine to yield the equilibrium ensemble of interface structures under given conditions. The interfaces considered are solid surfaces, grain boundaries, and interfaces in emulsions.
The response of defects to internal and external fields is an important subject in materials science and at the same time one of the most difficult and least understood. Two important examples of point defect aggregation are (1) void formation in grain boundaries in stressed turbine blades at high temperatures and (2) three-and four-grain junctions under electric fields in microelectronic interconnects. The internal field arises from (long-range)
interactions among defects. Such interactions are responsible for defect aggregation. In modeling internal fields, questions arise regarding what is the statistical nature of defect distribution, what (if any) correlations there are between defects, and what length scales are required to take these correlations into consideration. Defects appear to have many intermediate configurations that may be near local minima of the energy. In response to internal and external fields, defect configurations evolve in time in a complex manner. For example, the way that dislocations arrange and rearrange into network, cell, and subgrain boundaries and eventually into grain boundaries during deformation is not yet understood. The evolution of defects is highly dynamic in nature and presents significant challenges to materials scientists and mathematical scientists. Currently, it is simply not known whether there exists a unique minimum or multiple local minima for groups of dislocations.
The modeling of the evolution of defects is important in materials science because, in many cases, defects directly control microstructural evolution, and knowledge of microstructural evolution is a basis for designing thermomechanical treatments in industry. Defects determine the mechanical constitutive equations in nearly all cases: plastic deformation, fatigue, and creep. Constitutive equations are usually formulated at the continuum length scale and omit the details at the mesoscopic scale. Many (but not all) deformation and fracture problems of interest to materials scientists and structural engineers are well defined. Applied mathematicians, known as applied mechanicians, have for years had a tremendous impact in this domain in analyzing deformation and fracture problems (elasticity, plasticity, fracture mechanics, and micromechanics). Standard mathematical methods, such as partial differential equations, singularity analysis, finite-element methods, and so on have been intensely utilized and further developed in this area. Applied mathematicians have contributed to creating materials with improved mechanical performance that provide greater margins of safety in structural engineering applications.
In many materials, especially brittle materials, eventual failure is attributed mostly to inherent flaws in the materials. Often, the most severe flaws control the probability of failure of the material. This situation is not unique to mechanical failure; it is also encountered in other types of failure such as dielectric breakdown and failure in superconducting networks. Treatment of such problems demands statistical methods. In recent years, however, materials scientists have also resorted to discrete modeling to treat such problems at a scale traditionally appropriate for continuum mechanics.
In the following sections, additional problem areas are presented, including modeling methodology, mechanics of defects and interfaces, plasticity and fracture, large local fields and instability in random systems, dynamic fracture, liquid crystals, and a few topics concerning the structure of interfaces on the atomistic level and the macroscopic properties that result. They provide a glimpse into some of the current activities in the areas of defects, deformations, and interfaces and point out some issues that may interest mathematical scientists. These problem areas are representative but not exhaustive, and the reader is encouraged to refer to the large current literature of applied mechanics (for example, appearing in the Journal of Applied Mechanics) and materials science (for example, appearing in the Journal of Materials Research, the Journal of the American Ceramics Society , and so on) for further exploration of this field.
DEVELOPMENT OF MESOSCALE STATISTICAL MECHANICS OF SOLIDS
Many of the important problems in the science of solids, especially metals and semiconductors, involve predicting defects—such as clusters of impurities and point defects, dislocations, grain boundaries, and interfaces—in the solid lattice. These phenomena are modeled in macroscopic continuum theories using constitutive models and rate expressions for which the coefficients come from either experiments or more macroscopic theories. Direct simulation by ab initio methods and even atomistic calculations using empirical interatomic potentials are in many cases too expensive to be of practical utility for complex systems (see Chapter 8).
Mathematical analysis aimed at combining direct simulation of local behavior with a mean-field theory is needed to develop descriptions of nonhomogeneous solid phases. Thermodynamic density functional approaches, as developed for description of liquid/gas and solid/liquid interfaces, are a first step toward the development of such a mean field theory. Density functional theories have proven successful for relatively simple problems, for example, describing interfaces in systems governed by simple intermolecular potentials such as hard spheres and Lennard-Jones potentials, but have not been extended to a general framework that will allow input from more complicated interatomic descriptions or from ab initio calculations. These extensions will require the input of mathematical analysis, numerical analysis, and statistical physics.
MECHANICS OF DEFECTS AND INTERFACES
The description of point defects, defect clusters, dislocations, and interfaces using classical elasticity, nonlinear elasticity, and atomistic theory is a major field of micromechanics research that bridges physics and engineering (Hirth and Lothe, 1982; Mura, 1982). The issue is to describe the configurations of dislocations, voids, precipitates, twins, interfaces between phases, vacancies, and clusters, to describe the interaction in these configurations, and to understand how these configurations give rise to macroscopic phenomena such as plasticity, magnetic hysteresis, and transformation kinetics. Much of the past work has been on equilibrium configurations of defects—see, for example, Mura and Nakasone (1989), Qin et al. (1991), Fan et al. (1991), Venkataraman et al. (1991), and Mura (1987). Mathematical models of dislocation distributions were developed in Head et al. (1987), and free-boundary methods were used to study such models in Caffarelli and Friedman (1988) and Howison (1990). There is now a need to understand the evolution of defects during deformation and crack initiation under cyclic loading. The use of nonlinear elasticity, atomistic interaction potentials, and, occasionally, the Schrödinger equation is often called for in these problems as in problems of crack nucleation, defect clusters, and other aspects of material inhomogeneity and deformation heterogeneity (Morinaga et al., 1987, 1988; Sato et al., 1988; Watanabe et al., 1989). In many cases, such as the inversion of residual stresses and plastic deformation from surface displacements, and the prediction from pull-out test data of sliding and debonding of fiber from matrix, the problems are inverse problems. Such ill-posed problems can be solved under certain circumstances (Gao
and Mura, 1989; Mura and Gao, 1989, 1992). Similar problems exist in nondestructive evaluation of material defects (described in Chapter 7).
A general approach to the description of defects that relies on topological classification is discussed in Mermin (1979) and Kléman (1983). In this theory, defects are classified by homotopy: all defects in the same class are homotopic, that is, can be obtained one from the other by continuous deformation. While this provides an elegant way to classify many different kinds of defects and provides an interesting application of topology to materials science, it remains to forge a stronger link between the topological type of a defect and its actual behavior as described by differential equations that connect external forces and defect motions.
PLASTICITY AND FRACTURE
Understanding the theory of plasticity is fundamental to understanding a large variety of behaviors of materials in processing and performance, including metal forming, injection molding, instability, fatigue, fracture, friction, wear, and penetration (Drucker and Prager, 1952). The simplest governing equations of plasticity undergo a change of type from elliptic to hyperbolic as a material's capacity to harden with strain is lost (that is, in the perfectly plastic limit). These simplest theories of plasticity have received a fair amount of attention from mathematicians. There are three fundamental issues here that need attention: plastic deformations are intrinsically time-dependent, the deformations are generally large, and there are significant microstructural effects. Although there have been important attempts to model these effects—see, for example, Simo and Ortiz (1985) and Wallace (1985)—most materials scientists believe that the effects remain to be modeled accurately. There are subtle issues associated with boundary conditions, which, in metal-forming problems, must respect frictional constraints.
There are important challenges in numerically solving the equations of plasticity. As a material's plasticity is increased, the governing elliptic equations become very stiff, and the hyperbolic limits of these elliptic equations cannot easily be solved by numerical procedures. Hyperbolic equations describe perfectly plastic materials, but the uniqueness of their solutions is not guaranteed. To obtain a solution for plastic materials, different solutions for perfectly plastic materials can be obtained and the ones that match low-hardness solutions selected as the corresponding perfect-plastic solutions. Alternatively, unique and well-defined plasticity solutions may be sought by incorporating elasticity. Finite-element methods are especially useful for this latter type of problem.
A different approach to plasticity is the theory of continuous distributions of dislocations. A single dislocation can be seen at a distance from its center from local deformations of the crystal geometry. Thus if a circuit enclosing the defect is made through the lattice, and each lattice bond angle is assumed to be that of a perfect crystal, the sum of the angles on the circuit will not total 360 degrees; the difference between the total and 360 degrees is the torsion of the circuit. The Burger's vector is that vector needed to close the loop. In the continuous theory, these vectors are given a continuous density distribution. This theory links the failure of Burger's circuits to close when dislocations are present to the
fact that the tensor field describing local deformation is not integrable. The nonvanishing torsion of this tensor field is associated with the presence of dislocations. An additional theory, mostly kinematic and with close ties to differential geometry, is developed for this torsion. This theory, like the topological theory of defects, has provided a useful conceptional framework, but classical treatments of it, for example, Kröner (1958) and Nabarro (1967), have not come to grips with forces and energies. More recently, a related theory with possibilities for development beyond kinematics has appeared (Davini, 1986; Davini and Parry, 1993).
The onset of plastic deformation, or yield, is often assumed to be insensitive to pressure. This is usually a good assumption for metals and many polymers under many conditions, although it does break down under large tensile stress as experienced at the crack tip due to void formation. In more brittle materials, the extent of intrinsic plasticity is usually small, and various damage mechanisms, including friction, microfracturing, and cavitation, often contribute significantly to the apparent plastic strains. Since these mechanisms are all pressure-dependent, the resultant plasticity is also pressure-dependent. Another type of pressure-sensitive plasticity occurs in phase transformation, as in steels and zirconia. In both cases, the transformation can be triggered by deformation or stress and the volume increases during phase transformation. By taking advantage of this capability, ceramists have invented toughened ceramics using zirconia in which fracture energy is increased by a factor of nearly 50 (McMeeking and Evans, 1982; Budiansky et al., 1983; Chen and Morel, 1986; Chen, 1992).
Coulomb's yield criterion, which considers a linear combination of effective shear stress and pressure to be yield-inducing, has been adopted to investigate crack-tip fields in pressure-sensitive dilatant materials. The use of Coulomb's yield criterion is justified by experimental results for polymers and zirconia. In the last few years, a systematic study has begun on fracture mechanics under such a yield criterion. Although plane-strain and plane-stress crack-tip fields can be obtained by both asymptotic analyses and finite-element methods (Li and Pan, 1990a, b; Dong and Pan, 1991), anomalous behavior is found beyond a certain range of dilatancy. (Large dilatancy corresponds to strong pressure sensitivity.) This is due to two causes. First, for plane strain, the stress ahead of the crack is purely hydrostatic for large pressure sensitivity. This purely hydrostatic stress is located at the vertex of the yield surface in the stress space where the plastic flow cannot be uniquely determined according to rate-independent plasticity theory. Second, for extremely large pressure sensitivity, the dilatational strain at the crack tip, and especially at the crack faces, may cause material interference. As the material hardening decreases and the perfectly plastic regime is entered, the plastic zone ahead of the crack tip collapses into a thin line at a critical pressure sensitivity. Such a zone collapse, which is not predicted by classical fracture mechanics, has actually been observed in ceria-stabilized zirconia (Yu and Shetty, 1989) and rubber-toughened epoxy.
It is likely that many novel features in fracture mechanics remain to be discovered as the scope of constitutive behavior is broadened beyond the classical types of plastic flow. Such explorations could further extend the enormous success of conventional fracture mechanics in engineering and materials science applications. Solution of these problems will probably require considerable use of the finite-element method, but a more rigorous and
formal mathematical approach that seeks to classify governing equations and to outline the basic types of their solutions near crack-like discontinuities should prove fruitful. The classifications should be based on the parameters in the constitutive equation and the magnitude of strains or stresses. Rigorous theorems of existence and uniqueness typically are lacking.
LARGE LOCAL FIELD-INDUCED INSTABILITY IN RANDOM SYSTEMS
Although mechanical failure has been intensively studied, it is difficult to model microstructures from which failure can be reliably predicted (Herrmann and Roux, 1990). These microstructures may be quasi-homogeneous and continuous, as in most real materials, or they can be discrete assemblages such as a single bundle or bundles of cables. Many advanced composites in use and under investigation have microstructures between these two extremes. Many methods have been developed to analyze these problems. Continuum theory is usually a good starting point to handle failure in the first type of microstructure, while discrete statistics or probability theory has been more commonly adopted to describe failure in the second type. Neither approach is complete or adequate, even under the best of circumstances, and a combined approach is probably necessary but may not be sufficient for more general problems.
Material heterogeneity has a strong influence on the strength of quasi-homogeneous materials. However, there is no general prescription for finding bounds for the strength of materials in the same way that there is for finding bounds for effective elastic moduli (Li and Duxbury, 1989; Duxbury and Kim, 1991). The reason no such general bounds currently exist is that, due to the size effect that occurs in most statistical models of materials strength, bounds depend partly on volume and volume may depend on microstructure. Which aspects of the microstructure are of importance is still open to debate. The slow convergence to asymptotic behavior typical in the area of materials strength makes the need for analytical input more acute.
The statistics of strength of quasi-homogeneous materials are also anomalous, as is well known from experiment and by weak-link arguments (that is, arguments using spatial variability in local strength). Phenomenological distributions, such as the Weibull distribution, have been adequate to fit experimental data, but it is a challenge to determine the relationship between the parameters in the phenomenological distributions and the microstructure of the materials. Moreover, weak-link arguments do not usually take into account the inhomogeneous strain field inside a material; in this sense, fracture mechanics and fracture statistics are incompatible.
Mechanical failure is merely one example of a large class of instability properties of quasi-homogeneous materials that do not yield in a straightforward manner to solution by the homogenization procedures that have been so successful for modeling effective transport properties and elastic moduli. These and similar instability problems, for example, dielectric breakdown (Duxbury et al., 1990) and resistance problems (Duxbury et al., 1987, 1991; Li and Duxbury, 1987), have received less rigorous attention than effective elastic and transport property problems.
Many attempts have been made to predict the strength of composites using regular arrays of inclusions, the mechanics of which is studied in enormous detail using finite-element methods. These approaches fail because statistical variability, so important in strength problems, is absent from the analysis. At the other extreme, the physics community has recently introduced random network models that treat the statistics in some detail, but the mechanics in less detail. Mathematical analysis is needed to find a balance between the mechanics and statistical variability that can lead to effective prediction of strength and of instability problems.
Statistical modeling of material strength and mechanical failure is closely related to percolation theory. The material is usually modeled as a network or lattice of elements, each of which may be present or absent with a certain probability. These elements have randomly distributed strength or fail in time according to a distribution that is a function of the load history. Monte Carlo simulations using such models yield information on asymptotic distributions for strength and lifetime, scaling phenomena, critical points and transitions, fractal behavior, localization, universality, renormalization, fracture toughness, and interface effects among elements. Although many of the phenomena observed in Monte Carlo simulations can be explained in the context of mathematical statistics, some of them are still not understood.
DYNAMIC FRACTURE
One of the outstanding open problems in fracture mechanics is that of dynamic fracture. In principle, dynamic fracture occurs in its simplest form in brittle materials, such as ceramics, where elasticity is presumably obeyed. However, even here there are many unsolved problems. These include both one-dimensional and two-dimensional crack propagation problems as well as the more difficult, but more commonly encountered, three-dimensional problems. There now exists a large body of observations on dynamic fracture that are used empirically for failure analysis. A more rigorous interpretation of these observations using dynamic fracture mechanics (Freund, 1990) is a challenge for mechanicians and mathematicians.
At the simplest level, many interesting problems can be posed in the context of one-dimensional models. Even these simple models are most often nonlinear and difficult to solve. It would be very useful to find explicit steady-state solutions of these models. Steady-state solutions of these models can be found for a monoatomic square lattice in two dimensions, but what about other lattices, including diatomic ones? What is the effect of adding disorder to these models, either in the form of spatially random bond strengths or in the form of external perturbations? Solution of these mathematical challenges could provide insight into experimental observations.
One of the major problems in the field of fracture dynamics in two dimensions has already been solved completely. This problem is the problem of finding the stress fields produced on the basis of linear elasticity by a crack moving in a straight line in an infinite two-dimensional plate. More difficult two-dimensional problems that are still unsolved include the linear stability of the crack solutions (linear stability has been checked only with
respect to certain limited perturbations) and problems in plates that have boundaries (the motion of a crack in a strip is understood thoroughly only in the limit in which its acceleration is infinitesimally small). Our ability to tackle three-dimensional problems is even less adequate. The problem of general motion of crack fronts seems so difficult that it is always approached with many simplifications, such as reduction to linear motion in two dimensions. In most practical cases, failure is a three-dimensional phenomenon. Even in a two-dimensional plate, dynamic crack growth usually becomes three-dimensional in nature if the plate is not flat. Patterns and topography of crack propagation and bifurcation, which are of central importance for failure analysis, can be understood only if three-dimensional characteristics are considered. This is not possible at the present time.
Additional problems result from considering the types of nonlinearity present in real materials. From the continuum viewpoint, one can imagine changing the constitutive relations of the material in which the crack moves to include plastic flow or dependence on strain-rate. Effects of dilatancy and even adiabatic heating, which could result in structural changes, may also be important in some materials, for example, polymers. The problems of heterogeneity and residual stresses, typically encountered in real materials, require attention. Finally, as noted in Chapter 3, fracture dynamics may be connected with the ''sharkskin'' and "spurt" instabilities encountered in polymer melt extrusion.
LIQUID CRYSTALS
Liquid crystals are "meso-phases" or "meso-states" of matter intermediate between ordered crystals and disordered liquids. On a continuum scale, the material is anisotropic with sufficient disorder in at least one spatial direction to permit flow but with a high degree of order in at least one other direction. The molecules of a liquid crystal are either rod-or disk-like. A liquid crystalline state can be achieved either in a solution (lyotropic liquid crystal) by increasing the concentration of the mesogen (that is, the mesophase-forming substance), or from a melt (thermotropic liquid crystal) by passing through a thermal transition; see, for example, Doi and Edwards (1986). Liquid crystalline materials are commonly described in terms of a director field. When the director is correlated in a single spatial direction, the meso-phase is called nematic; the simplest conceptual picture of a nematic phase is aligned rod-like molecules. Cholesteric liquid crystals are nematic-like structures in which the director has a helical twist. When there is two-dimensional correlation in the fluid phase with periodicity in one of these dimensions, the meso-phase is called smectic; smectic phases, of which there are many, differ according to point group-symmetries.
Liquid crystals are found among both low-and high-molar-mass organic compounds. Low-molar-mass liquid crystals are typically responsive to applied fields and may be optically active; they are used in electronics applications, including displays. Liquid crystal nonlinear optics (NLO) devices are being investigated with respect to possible applications for eye or sensor protection from laser radiation. Optical wave mixing and parametric conversion in liquid crystals have also been demonstrated in the infrared spectral domain, a context in which few other NLO materials exhibit these properties. Polymeric liquid crystals are of two
types: in one, the mesogenic unit is in the backbone of the macromolecule; in the other, it is a pendant side chain. Main-chain liquid crystalline polymers have been shaped into fibers that have specific moduli and tensile strengths superior to steel, high use temperatures, and excellent chemical resistance. They are also under study for possible applications to nonlinear optics (see Chapter 7). Applications in structural materials have been limited by an inability to control microstructure (and hence macroscopic properties). Potential applications for side-chain liquid crystalline polymers are analogous to those for low-molar-mass liquid crystals, except that structural considerations for such side-chain types are incorporated through the polymer backbone.
An equilibrium theory for low-molar-mass nematic liquid crystals developed by Oseen, Frank, and Ericksen describes static configurations in these materials rather well, including configurations that occur under the competing influences of external magnetic and electric fields and solid surfaces to control alignment in these transversely isotropic liquids; see de Gennes (1974) and Ericksen (1976) for references. Quantitative predictions of the theory have been used successfully to optimize performance in sophisticated display devices; see, for example, the articles by Raynes, Needham, Schaefer, and Berreman in Hilsum and Raynes (1983). The lack of a correspondingly successful model for smectic liquid crystals has proved to be a serious obstacle to progress in understanding these more complex thermotropic systems. The close connection between the theory for nematics (in the limit of equal elastic coefficients for all modes of elastic strain) and harmonic mappings from three-dimensional space onto the sphere has received considerable mathematical attention, for example, in Coron et al. (1991).
As recently as the 1960s, non-Newtonian flow of a nematic liquid crystal was ascribed to variations in the degree of orientational ordering induced by flow. However, the dynamic continuum theory for these anisotropic liquids developed by Ericksen and Leslie (Leslie 1979; de Gennes, 1974), which successfully predicted the novel scaling exhibited in shear and Poiseuille flow, clearly demonstrated that non-Newtonian flow effects stem from competition between flow and solid boundaries to control alignment. The study of shear flow instabilities for liquid crystal flow is far more complex than that for fluids modeled by the Navier-Stokes equations (Luskin and Pan, 1992). Analyses based on the Leslie-Ericksen continuum theory explain many flow phenomena, including a number of instabilities in the presence of flow, electric and magnetic fields, and temperature gradients (Manneville, 1990). Indeed, this theory led to the experimental discovery that one can, in certain circumstances, induce Bénard convection in a nematic by heating from above!
There are three main mathematical challenges in this area: (1) development of models that capture the correct asymptotic behavior of the original equations for non-Newtonian flow of nematic liquid crystal; (2) development of better tools to study the bifurcation diagram of spatially extended systems in which the symmetries of the various states are not necessarily known a priori; and (3) development of numerical algorithms to study the evolution following instabilities, the existence of time-dependent a periodic states, and chaotic flow. The so-called amplitude equations used to study the slow, long-distance behavior of non-Newtonian flow in nematic liquid crystals are inadequate to study the evolution between the various structures or the ways in which these structures compete. For example, recent experiments on convection in non-Boussinesq fluids show that the front that
separates a region of hexagonal symmetry propagating into the conduction background is not simple but rather is itself composed of parallel convective rolls.
The formation and motion of orientation defects, both "disinclinations" (singularities in the director field) and "walls" (orientation boundary layers), are of considerable importance. The rheology of nematics often appears to be dominated by the dynamics of defects. Very little is known about defect dynamics, including conditions under which a grain-like multidomain morphology will develop. Developing the theory for defect dynamics remains a rich lode of problems for nonlinear mathematics; see, for example, Coron et al. (1991) and several chapters in Lam and Prost (1991). The nature of nematic order in the neighborhood of a defect and the need to incorporate imperfections of local alignment in a consistent way have been of particular recent interest for both low-and high-molar-mass liquid crystals. For low-molar-mass liquid crystals, these topics have recently been discussed in Pismen and Rubinstein (1992).
Liquid crystalline polymers were introduced in Chapter 3. The properties of nematic main-chain liquid crystalline polymers and the current understanding of their rheology have been reviewed in Ciferri (1991). Morphology has been addressed in detail in Donald and Windle (1992). Thermotropic systems are typically random copolymers, which would not normally be expected to form regular crystals in the solid state. Crystal-like patterns are observed in x-ray diffraction, however, and attempts to explain these patterns in systems with random molecular ordering have required new thinking about the solid phase formation.
A fundamental issue from the point of view of applications of liquid crystalline polymers to structural materials is control of orientation (that is, the director field) in complex processing flows such as those that would be experienced in molding. The outstanding mechanical properties achieved in fibers, which result from the ease of alignment of the nematic director in the flow utilized for fiber drawing—and hence from the covalent bonds of the rigid polymer backbone—cannot be achieved in the more complex flow fields experienced in an injection or compression mold. Liquid crystalline polymer films tend to have excellent mechanical properties in one direction but very poor properties in a direction transverse to that one. The Leslie-Ericksen theory is inadequate for liquid crystalline polymer macromolecules, but a generalization due to Doi (Doi and Edwards, 1986) has had some success. The macromolecular dynamics are dominated experimentally by a multidomain texture that is not explained by existing theory. It is known that, at a critical shear rate, the director field in shear flow undergoes a transition from "aligned" to "tumbling." Both limited experimental observations and scaling arguments based on molecular size considerations suggest that director singularities must be "soft"; that is, the elastic coefficients must depend on the distance to a singularity's core. Thermotropic liquid crystalline polymers of possible commercial interest are multiphasic in the melt. They have a nematic liquid phase and low-melting crystal-like structures that grow on time scales of experimental interest; see, for example, Kalika et al. (1990) and Amundson et al. (1991).
Molded parts of thermotropic liquid crystalline polymers typically show a complex "skin-core" morphology reminiscent of that seen in fiber-filled polymer composites. In the absence of an adequate continuum theory, it has been difficult to address velocity and structure development in complex flows by computation. Simple models of processing flows using the Leslie-Ericksen theory show the possibility of a variety of bifurcations within the
flow field (Rey, 1991), but even these do not consider the multidomain structure of the fluid. Continuum theories for fiber-filled systems, which lack the elastic stresses resulting from the nematic potential, show qualitative changes in flow field structure at even very low fiber loadings (Lipscomb et al., 1988).
EQUILIBRIUM AND NONEQUILIBRIUM SURFACE STRUCTURE
Experimentalists have benefited from a large body of mathematical and theoretical development in surface structure. The evolution of this work has occurred over a long period of time during which there was little experimental capability to conduct serious tests of the theory. In the last 10 years, a remarkable confluence of theoretical, computational, and experimental capabilities has occurred. The breakthroughs in all three areas described in the following two paragraphs could not have been predicted, and yet the current fruitful synergy of theory, computation, and experiment could not have occurred without the many years of effort that preceded them. The history of how this synergy developed is briefly reviewed here.
The crucial underpinnings of the theory of the equilibrium properties of solid surfaces were established by Gibbs (1876, 1878, 1961) and developed extensively during the first half of the twentieth century, culminating in some beautiful work in the 1950s (Herring, 1951, 1953). Fundamental issues in nonequilibrium crystal growth were investigated in the 1950s (Burton et al., 1951). This early work set the language and framework for interpretation of all contemporary and subsequent experimental work in the field. It was not, however, until the pioneering work of Mullins (Gruber and Mullins, 1967), followed in the 1970s and early 1980s by extensive progress in the understanding of critical phenomena (Nozieres, 1991; Wortis, 1988), that the language and formalism necessary for describing the finite temperature properties of surfaces were developed. While crystal growth is one of the most important problems in surface science, the mathematical and theoretical language necessary for describing growth processes that are not in the steady-state setting of Burton, Cabrera, and Frank (Burton et al., 1951) has advanced only recently and still remains far from complete; see Villain (1991), Villain et al. (1992), and Venables (1992) as well as Chapter 4 and the references therein for additional information about mathematical models for crystal growth.
The 1980s saw breakthroughs in experimental techniques for studying structural properties, most notably scanning tunneling microscopy (Binnig and Rohrer, 1987). These new experimental capabilities now allow direct observations that require recent theoretical formalisms for interpretation and that allow detailed predictions of theories to be tested (Metois and Heyraud, 1987; Eaglesham et al., 1990; Williams and Bartelt, 1991; Alfonso et al., 1992). Great advances in computer power now allow sophisticated theoretical tools, such as Monte Carlo and molecular dynamics simulations, fractal and scaling analysis, and transfer matrix and free fermion calculations, to be applied routinely to data interpretation. In principle, the computing power now available allows experimentalists to present and interpret their results at a level that challenges further theoretical development.
DEVELOPMENT OF A LATTICE MODEL OF MICROEMULSIONS
A microemulsion is a homogeneous solution of water and a hydrocarbon oil, rendered mutually soluble by a third component that is amphiphilic, that is, that has both a water-soluble (hydrophilic) part and an oil-soluble (hydrophobic) part. The earliest and simplest lattice model of microemulsions was developed in the 1960s (Wheeler and Widom, 1968) and applied in the analysis of experimental results. Although there are now many alternative and more elaborate lattice microemulsion models, as well as a large succeeding and closely related literature on complex fluids, vesicles, microemulsions, biomembranes, and so on, the Wheeler-Widom model is presented in some detail here to illustrate the basic ideas of microemulsion models and to convey a sense of the analysis done in this context.
The Wheeler-Widom microemulsion model envisions three species of molecules in the mixture: AA (oil), BB (water), and AB (amphiphile), with strong repulsions between AAs and BBs. The amphiphile solubilizes the AA in BB by creating micelles (submicroscopic aggregations of molecules; see Figure 5.1): An oil molecule AA is surrounded by amphiphiles, the A ends of which point inward toward the AA and the B ends of which point outward. Since B-B contacts are allowed, such a micellar complex is then readily accommodated in a phase that is primarily BB. The amphiphile has shielded the As from direct contact with the Bs. With roles in the picture reversed, one has BB dissolved in AA.
In this early version of the model, the molecules AA, BB, and AB were imagined to occupy the bonds of a lattice, with only A ends or only B ends allowed to meet at a common lattice site, never both As and Bs. Infinitely strong repulsion between As and Bs was imposed. At the same time, each lattice site became unambiguously identifiable as an A site or a B site, and the model thus became equivalent to an Ising spin model, where, at each site, there is one of two spin states. All the properties of the AA, BB, AB mixture model
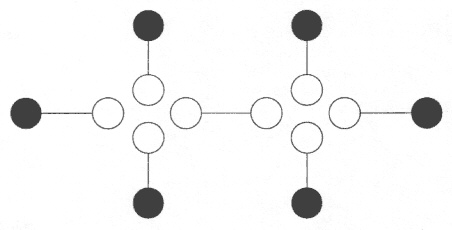
Figure 5.1 Model of microemulsion. The A ends of the amphiphiles are unshaded, and the B ends are shaded. The center A-A structure is an oil molecule that has been solubilized in water.
could then be directly mapped, or transcribed, from those of the thoroughly studied Ising model. That theme is discernible in all of the later models as well.
After the publication of the paper (Wheeler and Widom, 1968) in which the model was first introduced and the analysis begun, much of the analysis was done by B. Widom, K. A. Dawson, and M. D. Lipkin; see, for example, Widom et al. (1988). Lipkin found and classified the many complex ground states (zero-temperature states) of the model (Lipkin, 1988), and Dawson generalized the model in several ways and introduced more sophisticated methods of approximation and analysis for deriving its properties, including low-temperature series expansions, renormalization-group methods, and Monte Carlo computer simulation (Dawson, 1987).
Among the experimentally observed properties of microemulsions for which a model should account is the peak at wave vector between about 0.02 and 0.05 Å-1 in small-angle x-ray or neutron scattering. This peak implies an incipient periodicity in an otherwise isotropic solution, which prefigures the liquid crystalline phases that are so prominent a part of the phase diagrams of real water-oil-amphiphile solutions. The scattering functions implied by the model were found by several methods, including a mean-field theory based on the local-mean-field approximation that had already been applied to sketch the phase diagram, and computer simulation. The model gave a convincing account of the origin of the experimentally observed scattering peak. The lattice models later proposed by other theorists have been similarly, and in some cases even more, successful in accounting for the observed scattering.
Such lattice models are now dominant in the theoretical literature on microemulsions. They are notable for the great range and extraordinary subtlety of the phenomena that they are capable of illuminating and for requiring the full battery of techniques of statistical mechanics—analytical and computational—for their application.
GRAIN BOUNDARIES
Grain boundaries are planer crystal defects that possess complex structures and engage in highly complex behavior. In most cases to date, only primitive models have been developed in efforts to cope with this complexity. There are many areas where more powerful approaches based on more sophisticated mathematical concepts and techniques would be fruitful. A discussion of some of these concepts and techniques is presented in this section. See Chapter 4 for discussion of the dynamics of grain-boundary motion.
Statistical Issues
An important current issue is how to predict the macroscopic properties of a polycrystal consisting of many different types of boundaries (with different individual properties) distributed throughout the material in different ways (Watanabe, 1992). Two of the many phenomena of interest are intergranular fracture and penetration by boundary short-circuit diffusion. Another issue is how to extract information about the boundaries
present in a polycrystal from a technique such as texture analysis. Further advances in statistical approaches to these questions are required in order to advance the recent concept of "grain boundary engineering." that is, tailoring the boundary structure in order to improve the overall properties (Raj and Sass, 1988).
Statistical Mechanics Models
Relatively little is known about the fundamentals of how grain boundary structure depends upon temperature. Some primitive models have been developed (Kikuchi and Cahn, 1980). More realistic statistical mechanical models involving new mathematical approaches would be useful. See also two Chapter 8 sections, Microscopic Scale and Potentially Applicable Mathematical Sciences Developments.
Computer Simulation
Computer simulation has made an enormous contribution to the complex study of grain boundaries; see, for example, Alber et al. (1992). There is a great need for increasing our capacity to work with atomistic simulation models of increasing size using more realistic (that is, more complicated) interatomic force laws (Vitek and Srolovitz, 1989). Mathematicians can be of assistance in developing more efficient ways of minimizing N-dimensional functions and in creating faster and more robust algorithms for the calculations. Effective computer simulation of three-dimensional grain growth in the continuum remains a challenge.














