
Autonomous Precision Landing of Space Rockets
LARS BLACKMORE
SpaceX
Landing an autonomous spacecraft or rocket is very challenging, and landing one with precision close to a prescribed target even more so. Precision landing has the potential to improve exploration of the solar system and to enable rockets that can be refueled and reused like an airplane.
This paper reviews the challenges of precision landing, recent advances that have enabled precision landing on Earth for commercial reusable rockets, and what is required to extend this to landing on planets such as Mars.
BRIEF HISTORY OF AUTONOMOUS SPACE LANDINGS
In the past 50 years autonomous spacecraft have brought humans back from space, landed several rovers on the surface of Mars (Bonfiglio et al. 2011; Golombek et al. 1997; Soffen and Snyder 1976; Squyres 2005; Way et al. 2006), got a probe onto Saturn’s moon Titan (Tomasko et al. 2002), landed on an asteroid (Bibring et al. 2007), and more. Because of these missions, it is now known that Mars was once warm with plenty of water and could likely have supported life, and that Titan has lakes of methane, an organic compound. Steady progress has enabled heavier payloads to be landed in more exotic locations, and recent improvements, such as advanced decelerator technologies (Tibbits and Ivanov 2015), will further expand explorers’ reach in the solar system.
Although these missions have aimed for a particular location on the surface of a target planet, the precision has varied. Precision is quantified using a landing ellipse, the region where it is 99 percent likely that the vehicle will land. Before flight, mission planners must choose a landing site such that everywhere in the landing ellipse is safe for touchdown. Figure 1 shows that the landing ellipse for
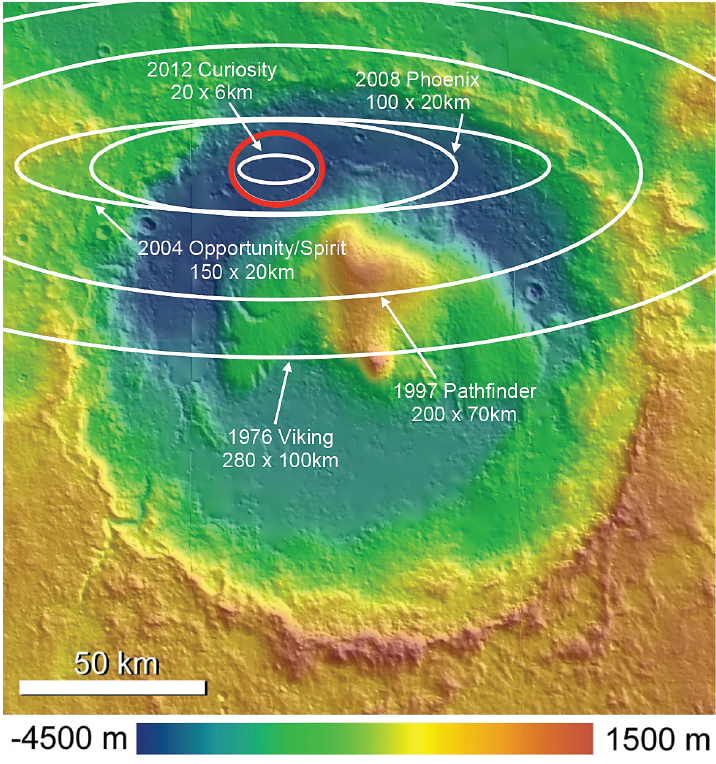
Mars missions has steadily improved, but is still measured in kilometers rather than meters.
THE NEED FOR PRECISION
When precision is measured in kilometers, missions must land in a desert (in the case of Mars) or in the ocean or on plains (in the case of Earth). If land-
ing precision could be measured in meters instead of kilometers, a world of new opportunities would open up: it would be possible to
- explore Martian caves and valleys,
- return samples from other planets,
- set up permanent outposts throughout the solar system, and
- make rockets that, after putting a payload into orbit, can be refueled and reused like an airplane, instead of being thrown away after a single flight, thus dramatically decreasing the cost of space travel.
CHALLENGES
There are some important challenges to precision landing on a planet.
Extreme Environment
A vehicle entering an atmosphere from space goes through extreme conditions.
- The majority of the entry energy is dissipated through friction with the atmosphere, resulting in extreme heating that must be dissipated; for example, the leading edge of the Apollo heatshield reached over 2500 degrees Celsius (Launius and Jenkins 2012).
- Drag causes enormous forces on the reentry vehicle; for example, SpaceX’s Falcon 9 Reusable (F9R) weighs about 35 metric tons and has a peak deceleration of six times Earth gravity on reentry.
- Winds push around the reentry vehicle, with high-altitude winds at Earth regularly exceeding 100 miles per hour.
- Communication may be denied for all or part of reentry as ionized air around the spacecraft interferes with radio communications; for example, the Apollo 13 return capsule endured a 6-minute blackout.
- And finally, a spacecraft operating outside of Earth orbit is subject to high radiation, which can be fatal for electronics. This is especially true of missions operating near Jupiter, where the radiation environment is particularly intense.
Small Margin for Error
With most landings, the first attempt must be a success or the vehicle will be destroyed on impact. Moreover, additional propellant is rarely available for a second landing attempt. For large rocket engines, throttling down to a hover is technically challenging and inefficient—every second spent hovering is wasted propellant.
For F9R, the rocket has to hit zero velocity at exactly zero altitude. If it
reaches zero velocity too low, it will crash; if it reaches zero too high, it will start going back up, at which point cutting the engines and falling is the only option. This requires precise knowledge and control of vertical position and velocity.
Touchdown Challenges
A dedicated system, such as landing legs, is usually used to attenuate the loads of landing, keep the rocket safe from rocks, and prevent it from tipping over after landing. Being able to design legs that can do this as mass- and space-efficiently as possible is a challenge, as is delivering the rocket to the upright and stationary position required to avoid overloading the legs’ capabilities. For the Curiosity rover, the SkyCrane system enabled the dual use of the rover suspension as the landing attenuation system (Prakash et al. 2008).
In addition, the landing environment may be hazardous. For the Mars Exploration rovers, the combination of rocks and high winds threatened to burst the landing airbags, so an autonomous vision and rocket system was added to detect and reduce lateral velocity (Johnson et al. 2007).
Need to Hit the Target
Achieving precision landing requires the vehicle to hit the target despite being pushed around by disturbances such as winds. For a space reentry vehicle, this is a unique problem because it is neither a ballistic missile nor an airplane. A ballistic missile tries to hit its target at high speed, so (like a bullet) it uses a high ballistic coefficient and high velocity to avoid being affected by disturbances. An airplane does get pushed around by disturbances, but its wings give it the control authority to correct for those disturbances with ease. A rocket landing vertically has neither of these advantages, making precision landing highly challenging.
RECENT ADVANCES
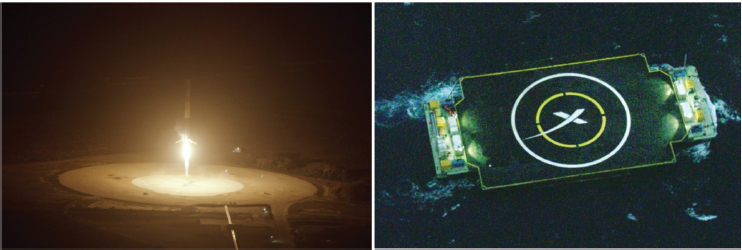
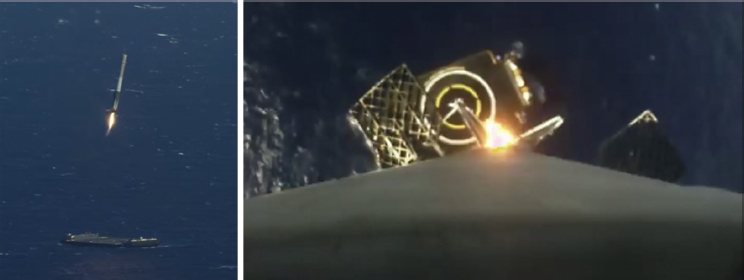
In the past 2 years, two commercial companies, SpaceX and Blue Origin, have sent rockets into space and landed them back on Earth within meters of their targets. Blue Origin’s New Shepard rocket has landed several times at the company’s West Texas test site. SpaceX’s Falcon 9 first stage has landed both on land at Cape Canaveral and on a floating landing platform known as the autonomous spaceport drone ship (ASDS), shown in Figure 2. Images from recent SpaceX landings are shown in Figure 3.
Central to achieving precision landing is the ability to control dispersions, which are variations in the trajectory caused by environmental uncertainty. To illustrate this, consider the example of Falcon 9’s first stage returning from space. To achieve precision landing, dispersions must be controlled so that, at touchdown, at least 99 percent of them fit within the designated landing zone. For F9R,
this means achieving dispersions in the landing location of 10 meters or better for a drone ship touchdown and 30 meters or better for a landing at Cape Canaveral.
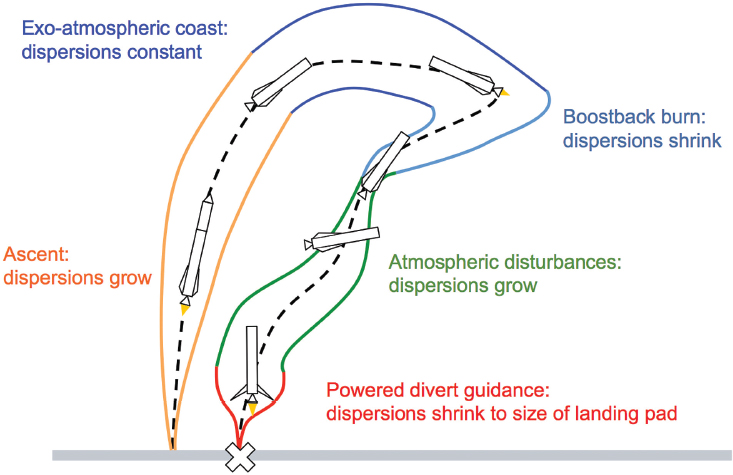
Figure 4 shows the various phases of F9R’s mission. On ascent, winds push the rocket around so that dispersions grow. The first opportunity to shrink dispersions is the boostback burn, which sends the rocket shooting back toward the launch pad. During atmospheric entry, winds and atmospheric uncertainties again act to increase dispersions. The landing burn is the last opportunity to reduce the dispersions, and requires the ability to divert, or move sideways.
For F9R, controlling dispersions requires precision boostback burn targeting, endo-atmospheric control with fins (shown in Figure 5), and a landing burn with a divert maneuver. The latter is one of the most challenging aspects, and is also required for proposed precision landings on Mars (Wolf et al. 2011). The vehicle must compute a divert trajectory from its current location to the target, ending at
rest and in a good orientation for landing without exceeding the capabilities of the hardware.
The computation must be done autonomously, in a fraction of a second. Failure to find a feasible solution in time will crash the spacecraft into the ground. Failure to find the optimal solution may use up the available propellant, with the same result. Finally, a hardware failure may require replanning the trajectory multiple times.
A general solution to such problems has existed in one dimension since the 1960s (Meditch 1964), but not in three dimensions. Over the past decade, research has shown how to use modern mathematical optimization techniques to solve this problem for a Mars landing, with guarantees that the best solution can be found in time (Açikmeşe and Ploen 2007; Blackmore et al. 2010).
Because Earth’s atmosphere is 100 times as dense as that of Mars, aerodynamic forces become the primary concern rather than a disturbance so small that it can be neglected in the trajectory planning phase. As a result, Earth landing is a very different problem, but SpaceX and Blue Origin have shown that this too can be solved. SpaceX uses CVXGEN (Mattingley and Boyd 2012) to generate customized flight code, which enables very high-speed onboard convex optimization.
NEXT STEPS
Although high-precision landings from space have happened on Earth, challenges stand in the way of transferring this technology to landing on other bodies in the solar system.
One problem is navigation: precision landing requires that the rocket know precisely where it is and how fast it’s moving. While GPS is a great asset for Earth landing, everywhere else in the universe is a GPS-denied environment. Almost all planetary missions have relied on Earth-based navigation: enormous radio antennas track the vehicle, compute its position and velocity, and uplink that information to the vehicle’s flight computer. This is sufficient for landings that only need to be precise to many kilometers, but not for landings that need to be precise to many meters.
Analogous to driving while looking in the rearview mirror, Earth-based tracking gets less and less accurate at greater distances from the starting point. Instead, the focus needs to be on the destination planet in order to be able to land precisely on it. Deep Impact is an example of a mission that used its target to navigate (Henderson and Blume 2015), but (as its name implies) it was an impactor mission, not a landing.
Recent research has achieved navigation accuracy on the order of tens of meters (Johnson et al. 2015; Wolf et al. 2011) using terrain relative navigation, where the lander images the surface of the planet during landing and matches features with an onboard map to determine its location. This can be tested on Earth, at least in part, without the need to perform the entire reentry from space.
Several companies have used experimental vehicles, some of which are shown in Figure 6, to demonstrate powered descent technology with low-altitude hops. Using these vehicles, terrain relative navigation has been tested on Earth (Johnson et al. 2015), and a demonstration on Mars is being considered for the Mars 2020 rover mission. If this is successful, combining terrain relative naviga-

tion with demonstrated precision guidance and control could finally make precision landings on Mars, Europa, and other bodies in this solar system a reality.
REFERENCES
Açikmeşe B, Ploen SR. 2007. Convex programming approach to powered descent guidance for Mars landing. Journal of Guidance, Control, and Dynamics 30(5):1353–1366.
Bibring J-P, Rosenbauer H, Boehnhardt H, Ulamec S, Biele J, Espinasse S, Feuerbacher B, Gaudon P, Hemmerich P, Kletzkine P, and 9 others. 2007. The Rosetta Lander (“Philae”) investigations. Space Science Reviews 128(1–4):205–220.
Blackmore L, Açikmeşe B, Scharf DP. 2010. Minimum landing error powered descent guidance for Mars landing using convex optimization. Journal of Guidance, Control, and Dynamics 33(4):1161–1171.
Bonfiglio EP, Adams D, Craig L, Spencer D, Arvidson R, Heet T. 2011. Landing-site dispersion analysis and statistical assessment for the Mars Phoenix lander. Journal of Spacecraft and Rockets 48(5):784–797.
Golombek M, Cook RA, Economou T, Folkner WM, Haldemann AFC, Kallemeyn PH, Knudsen JM, Manning RM, Moore HJ, Parker TJ, and 4 others. 1997. Overview of the Mars Pathfinder mission and assessment of landing site predictions. Science 278(5344):1743–1748.
Henderson M, Blume W. 2015. Deep Impact: A review of the world’s pioneering hypervelocity impact mission. Procedia Engineering 103(2015):165–172.
Johnson A, Willson R, Cheng Y, Goguen J, Leger C, San Martin M, Matthies L. 2007. Design through operation of an image-based velocity estimation system for Mars landing. International Journal of Computer Vision 74:319–341.
Johnson AE, Cheng Y, Montgomery JF, Trawny N, Tweddle B, Zheng JX. 2015. Real-time terrain relative navigation test results from a relevant environment for Mars landing. AIAA Guidance, Navigation, and Control Conference (AIAA 2015-0851), January 5–9, Kissimmee, FL.
Launius RD, Jenkins DR. 2012. Coming Home: Reentry and Recovery from Space. NASA Aeronautics Book Series. Washington.
Mattingley J, Boyd S. 2012. CVXGEN: A code generator for embedded convex optimization. Optimization and Engineering 13(1):1–27.
Meditch JS. 1964. On the problem of optimal thrust programming for a lunar soft landing. IEEE Transactions on Automatic Control 9(4):477–484.
Prakash R, Burkhart D, Chen A, Comeaux K, Guernsey C, Kipp D, Lorenzoni L, Mendeck G, Powell R, Rivellini T, and 3 others. 2008. Mars science laboratory entry, descent, and landing system overview. Proceedings of the IEEE Aerospace Conference, March 1–8, Big Sky, MT.
Soffen GA, Snyder CW. 1976. First Viking mission to Mars. Science 193:759–766.
Squyres SW. 2005. Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. New York: Hyperion.
Tomasko MG, Buchhauser D, Bushroe M, Dafoe LE, Doose LR, Eibl A, Fellows C, Farlane EM, Prout GM, Pringle MJ. 2002. The Descent Imager/Spectral Radiometer (DISR) experiment on the Huygens entry probe of Titan. Space Science Reviews 104(1/2):467–549.
Tibbits B, Ivanov M. 2015. Low density supersonic decelerator flight dynamics test-1 flight design and targeting. 23rd AIAA Aerodynamic Decelerator Systems Technology Conference (AIAA 2015-2152), March 30–April 2, Daytona Beach.
Way D, Powell R, Chen A, Steltzner A, San Martin M, Burkhart D, Mendeck G. 2006. Mars science laboratory entry, descent, and landing system. 2006 IEEE Aerospace Conference, March 4–11, Big Sky, MT.
Wolf AA, Açikmeşe B, Cheng Y, Casoliva J, Carson JM, Ivanov MC. 2011. Toward improved landing precision on Mars. IEEE Aerospace Conference, March 5–12, Big Sky, MT.
This page intentionally left blank.










