
C
The MIZOPEX Example: Flight Operations Denied
During its deliberations, the committee heard of numerous examples where proposals to use unmanned aircraft systems (UAS) in ways that were only slightly changed from previous practices met lengthy delays and were ultimately rejected for reasons that the proposers could not understand. The following example describes how a UAS weighing 1.5 pounds and flying at a maximum height of only 50 feet over water in a very low traffic area north of Alaska was denied approval after a review period of a year.
The Marginal Ice Zone Observations and Processes Experiment (MIZOPEX) field campaign was conducted in the summer and fall of 2013. MIZOPEX was a $3.5 million project funded by NASA with the intent of helping to address information gaps in measurements of basic parameters, such as sea surface temperature, and a range of sea-ice characteristics, through a targeted, intensive observation field campaign that tested and exploited unique capabilities of multiple classes of UAS. MIZOPEX was conceived and carried out in response to NASA’s request for research efforts that would address a key area of science while also helping to advance the application of UAS in a manner useful to NASA for assessing the relative merits of different UAS. Figure C.1 shows the operations range for the MIZOPEX observation field campaign.
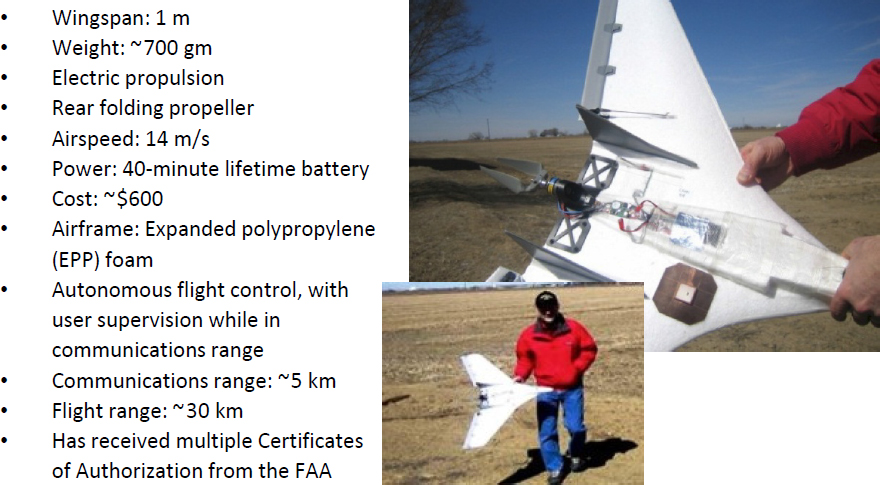
The UAS involved in MIZOPEX included the NASA SIERRA (maximum takeoff weight 400 pounds), operated by the NASA Ames Research Center; the InSitu ScanEagle (maximum takeoff weight 50 pounds), operated by the University of Alaska, Fairbanks; and the DataHawk (maximum takeoff weight 1.5 pounds), developed and operated by the University of Colorado. Federal Aviation Administration (FAA) concerns regarding the safety of the experiment focused on flight operations proposed for the DataHawk. As shown in Figure C.2, the airframe of the DataHawk consisted of a repurposed hobby aircraft made of lightweight EPP foam, a small metallic motor and battery, and miniaturized electronics for sensing and communications.
The primary mission of the DataHawk was to fly through the airspace corridor, shown in Figure C.3, from restricted airspace at Oliktok Point, Alaska, to a point in the Beaufort Sea approximately 27 nautical miles from shore, where it would land on the water and convert to a miniature surface buoy to transmit ocean surface temperature, using the foam airframe to stay afloat on the water. These surface data were to be collected over a 2-week period by overflights of the ScanEagle as the DataHawk/buoy drifted on the sea surface. Ground-based aircraft detection in the airspace along and near the transit corridor (1 nautical mile wide, 2,000 feet high) from restricted airspace R-2204 at Oliktok Point to international waters was provided by a Thales-Raytheon radar system. A test of the radar’s performance in detecting air traffic was required by the FAA before it could be used as part of the sense and avoid plan.

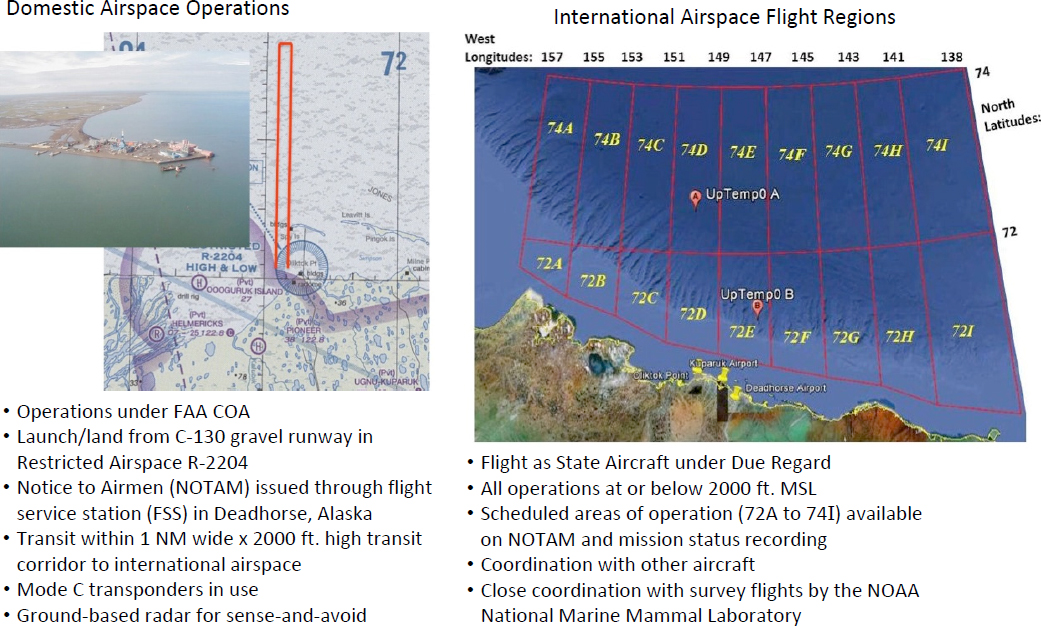
NOTE: COA, Certificate of Authorization; FAA, Federal Aviation Administration; MSL, mean sea level; NOAA, National Oceanic and Atmospheric Administration.
The DataHawk UAS developers and operators had several years of experience in flying small UAS in several states in class G (uncontrolled) airspace and in class E (en route) airspace. There were more than 120 Certificates of Authorization (COAs) prior to the MIZOPEX campaign. For the MIZOPEX campaign, a “pen- and-ink change” was requested to modify the existing DataHawk COA at Oliktok Point to allow the DataHawk to fly through the transit corridor, where it would land on the sea surface approximately 27 nautical miles from shore to convert to a surface buoy. The safety case in the pen-and-ink request focused on the collision hazard of the DataHawk airframe with a human, a surface vessel, or an aircraft. A Safety Risk Management Document (SRMD) was prepared following the guidelines of FAA Safety Risk Management Policy, Order 8040.4A. Federal Aviation Regulations Part 101-Moored Balloons, Kites, Amateur Rockets, Unmanned Free Balloons, and Certain Model Aircraft, which allows unregulated flights of similar payload packages (up to 4 pounds, compared to the DataHawk at 1.5 pounds), was cited in the safety-case argument. Mitigations included the following: (1) the DataHawk is constructed of materials similar to many commercially available balloon-borne instrument packages, with a weight of about one-third of the maximum weight allowed for a single package under Part 101; (2) during an entire flight, the DataHawk would fly at a maximum altitude of 50 feet above the sea surface; (3) the Anchorage Air Route Traffic Control Center confirmed that if the preflight notifications were followed there would be minimal risk of the DataHawk encountering another aircraft in the transit corridor; and (4) a radar-based detection system, previously demonstrated to the FAA, would provide ground-based aircraft detection during any flights through the transit corridor.
Even though the DataHawk operators initiated discussion with FAA for the MIZOPEX mission more than a year in advance of the deployment, the COA pen-and-ink request to change the existing DataHawk COA was never
approved, and a major part of the NASA-funded MIZOPEX mission was not allowed to be executed. Anecdotally, the FAA decision was based on the conclusion that once the DataHawk flew beyond the line-of-sight communication range, it would become a fully autonomous UAS, and that could not be allowed.
One of the participants in the project, J.A. Maslanik, summarized lessons learned during the MIZOPEX project as follows (Maslanik, 2016):
The iterative nature of the COA application process, in which the COA requester prepares and submits the application, then waits for FAA reactions regarding problems or issues, creates problems for challenging field campaigns such as MIZOPEX. Researchers hoping to propose non-standard UAS field campaigns have no way of gauging ahead of time whether FAA will accept certain approaches, and the tell-us-what-you-want-to-do-and-we-will-respond process leads to delays and some confusion.
Provision of exemptions for very low-risk UAS such as DataHawk under Part 101 (i.e., treating the aircraft as posing risk comparable to a weather balloon) would open up considerable capabilities for sensing using UAS. An alternative would be to allow such aircraft to operate under a COA in fully autonomous mode outside communications range (i.e., in a planned lost-link mode).
REFERENCE
Maslanik, J.A. 2016. Investigations of Spatial and Temporal Variability of Ocean and Ice Conditions in and Near the Marginal Ice Zone: The “Marginal Ice Zone Observations and Processes Experiment” (MIZOPEX) Final Campaign Summary, DOE/SC-ARM-15-046. Ed. Robert Stafford, DOE ARM Climate Research Facility. https://www.arm.gov/research/campaigns/osc2013mizopex.




