
CHAPTER 6
COMPARING RESPONSE OPTIONS
INTRODUCTION
Every marine oil spill is distinct, each with its own set of unique conditions and complexities. Oil spills may result from a variety of incidents—ranging from platform blowouts to tanker collisions—and the location, time of year, duration, depth, environmental conditions, affected biomes, and available response resources may all vary significantly. This diversity challenges responders to be adaptive to the particular circumstances of a spill and has led to the development of multiple marine oil spill response options. Current commonly used, open-water response methods include mechanical recovery of oil using skimmers and booms; in situ burning of oil at the surface; monitored natural attenuation; and enhanced dispersion of oil through the application of dispersants, either at the surface or via subsea injection. As will be discussed further, each method has advantages and disadvantages (see Table 6.1), and the determination of which method, or set of methods, to employ requires consideration of the spill conditions as well as any trade-offs associated with each technique. Additionally, the volume of oil that can be treated per unit time (i.e., the encounter rate) is evaluated, taking into account both the thickness and concentration of the oil and the speed that a particular method can interact with the oil. The use of bioaugmentation, biostimulation, enzyme addition, and solidifiers is not considered in detail because these methods have not been used to a significant extent, especially when considering a large-scale, open-water spill response. Note that biostimulation and bioaugmentation have been tried a number of times in nearshore and shoreline environments and even a few times offshore. They were proposed (but not implemented) during the Deepwater Horizon (DWH) oil spill, tested during the Ixtoc I spill, and recently tried at several spills in Europe. However, the testing and understanding of the biostimulation and bioaugmentation approaches are too limited to provide detailed descriptions in this text.
After presenting the advantages and disadvantages of individual approaches, this report examines special considerations and compares the results of using different response methods on the environment. As shown in Chapter 5, the decision-making process involves many factors. There are rarely opportunities to study the differences in environmental effects to the use of the different
TABLE 6.1 Operational Summary of Open Water Response Options
| Response Option | Benefits | Limitations |
|---|---|---|
| Surface Dispersant Application |
|
|
| Subsea Dispersant Injection |
|
|
| At-Sea Mechanical Recovery |
|
|
| Controlled In Situ Burning |
|
|
| Response Option | Benefits | Limitations |
|---|---|---|
| Monitored Natural Attenuation |
|
|
SOURCE: Modified from Coelho, 2013, and IPIECA et al., 2015.
response options. Therefore, responders often rely on integrated models to predict the effects of various response options.
SUMMARY OF KEY OFFSHORE RESPONSE OPTIONS
An optimal offshore spill response will likely require a combination of the response methods discussed above, which are often constrained by physical conditions, prevailing weather, and safety considerations. An International Union for Conservation of Nature report on evaluating oil spill response highlights the importance of considering the resources to be protected, the effectiveness of different response options, and the possible impacts of the response itself (Stevens and Aurand, 2008).
SURFACE DISPERSANT OPERATIONS
Overview
As discussed in Chapter 1, there are managed stockpiles of several well-studied dispersant products located around the world. There are also dispersant delivery systems (e.g., boat spray systems, coiled tubing, aerial dispersant tanks and spray arms) and platforms (vessels, aircraft, subsea equipment) located strategically to provide support in the event of a spill. In general, these products, systems, and platforms have been designed to deliver dispersant to an oil spill as effectively as possible with an understanding of the requirements of product safety and stability, government regulations, effectiveness on a range of crude oils, and specific hardware.
Dispersants are applied to surface waters from airplanes, helicopters, or boats. Dispersant spray systems are intended to provide a droplet size distribution (DSD) that minimizes misting of small droplets and slick penetration from larger ones. The dispersant-to-oil ratio (DOR) can be adjusted to actual field conditions from an initial rule of thumb value of 1:20 (or 5%) taking into consideration oil type, weathering, and slick thickness.
Natural processes (e.g., wind and wave action) mix the dispersant-treated oil into the top few meters of the water column. The small dispersed oil droplets (generally 10-100 microns [µm]) remain suspended in the water column and are an indicator of dispersant effectiveness (Li et al., 2009a,b; Lunel, 1993). While the larger naturally dispersed oil droplets are more buoyant and rise back to the surface, smaller chemically dispersed droplets are less likely to re-coalesce, and instead
form more stable oil-in-water emulsions. The dispersed oil droplets dilute (vertically and horizontally) within the water column and begin to dissolve and biodegrade. Initial dispersed oil water column concentrations of 10 to 50 parts per million (ppm; see Box 6.1) have been measured in the top 10 m under a slick (Lee et al., 2013a), and these concentrations continue to rapidly decrease within several hours (NRC, 2005; OSAT, 2010).
Benefits
Dispersant application from aircrafts can treat large volumes of oil over a large area. Application can be performed in higher wind and sea states than other response options that require mechanical containment. The ability to rapidly treat large volumes of spilled oil reduces the impact to wildlife at the ocean surface and on shorelines and can improve worker safety by reducing chemical vapors at the ocean surface. The application of dispersants to a surface slick can result in rapid dilution to very low concentrations. Additionally, under favorable conditions, dispersed oil droplets may begin biodegrading more quickly, because the smaller droplets provide a larger surface area for microbial action, which would facilitate more rapid removal from the environment.
Limitations
Special approvals may be required to apply dispersants. Regulatory authorities may require a minimum water depth and application distance from shore, and they may establish other exclusion zones or conditions. Aerial operations are restricted to daylight hours and typically require 3 statute miles of visibility, a minimum cloud ceiling of 1,000 feet, and wind speeds below 35 knots to ensure aircraft safety. In the case of vessel-based dispersant application, operational limitations associated with energetic sea states and corresponding concerns for responder safety need to be taken into consideration. Dispersant application requires specialized equipment and expertise to apply and has a limited “window of opportunity” as the surface slick continues to weather. Surface dispersant application may be less effective in calm waters and with more viscous oils, although studies have shown that dispersants stay with floating oil for an extended period of time, during which environmental conditions are likely to change (Huber et al., 2014; Nedwed et al., 2006). Other studies have examined dispersion of a range of heavier oils, some of which dispersed effectively (Belore et al., 2008). Ultimately, the removal of dispersed oil from the water column is dependant on biodegradation.
Effectiveness
The type of oil and environmental conditions present during the spill event will influence the effectiveness of the dispersant operation. Effectiveness is defined as the percent ratio of the amount of dispersed oil to the oil remaining at the surface after treatment and can approach 100%, especially for fresh, un-weathered oil. The overall effectiveness is influenced by the extent of oil weathering and its composition, available mixing energy, the type and amount of dispersant, water temperature, and salinity (Chandrasekar et al., 2006; Li et al., 2010; Mukherjee, 2008; Mukherjee et al., 2011; NRC, 2005). While oil components such as resins, asphaltenes, and larger aromatic compounds or waxes may be poorly dispersible, oil components such as saturates (major components in diesel fuel) will both naturally and chemically disperse. As mentioned, surface mixing energy is supplied mostly from waves and wind, and lower volumes of surface dispersant are generally required in higher sea state conditions to achieve desirable levels of dispersion (NRC, 2005). Though most crude oils and many petroleum-based fuels and lubricants can be dispersed initially, dispersant effectiveness will gradually decrease as the extent of oil weathering proceeds (IPIECA-IOGP, 2015), that is, loss of volatile components and formation of stable water-in-oil emulsions (Daling et al., 1990; Lewis et al., 1995; Payne and McNabb, 1984).
Even though chemically dispersed oil may have a different appearance due to the small droplet size, effectiveness can be difficult to verify in the field because the dispersant action may occur over an extended period of time, and wind and currents may transport the oil away from the application area. Additionally, the establishment of safety offsets for on-water personnel during aerial dispersant application may mean that significant time periods occur before in-water evaluation of dispersant effectiveness may be made. Visual observation of aerial dispersant effectiveness can be affected by such factors as weather, visibility, and daylight, so it is important that trained observers are deployed. The National Oceanic and Atmospheric Administration’s Dispersant Application Observer Job Aid mentions that no color change may be associated with dispersant application (NOAA, 2007). Therefore, definitive determination of dispersant effectiveness (whether at the surface or subsea) by measurement of fluorescence of specific crude oil components or laser light scattering from dispersed oil droplets should be used to augment visual observations.
A number of laboratories have evaluated dispersant effectiveness using a variety of test methods with known amounts of dispersant, reference oil, and water in an enclosed vessel under known energy mixing rates (Venosa et al., 2002). Summaries of a number of these dispersant effectiveness tests and comparisons of their results with different crude oils are widely available (see, for example, Holder et al., 2015). The results of laboratory tests are highly influenced by mixing energy and settling time as large oil droplets tend to resurface, especially in the closed systems employed by the specific tests. Thus, test methods measuring effectiveness during mixing are likely to indicate a higher level of effectiveness than are methods that measure effectiveness after a period of settling. In practice, while the measurement of the surface removal ratio of oil in the laboratory is useful for the relative comparison of products, it is not likely to reflect effectiveness values under operational conditions—particularly wave conditions—in the open ocean where there is significant potential for dilution and dispersed droplets are not likely to re-coalesce into a surface slick.
As a result of studying oil droplet size in the water column and the changes that occur when dispersants are used, it has been recommended that the DSD be used as an essential parameter to evaluate the spill response and the long-term behavior of the oil (NRC, 2005). While oil droplets in the water column retain their natural buoyancy, smaller droplets travel through the water column much more slowly as a result of the physics associated with their different sizes: namely, larger droplets tend to resurface and smaller droplets remain entrained in the water column for extended periods (Boufadel et al., 2006, 2007; Chen and Yapa, 2007).
Technological Advances
A review of improvements in dispersant technology is provided by Rowe et al. (2017). The main areas of focus on improving/enhancing surface dispersant operations have included
- New dispersant formulations and/or approaches to dispersing oil. For example, products are being considered that may have less solvent for higher effectiveness, use plant-sourced components as alternate raw materials, or consider different mechanisms such as the formation of Pickering emulsions or the use of mechanical energy to form small droplets (Brandvik et al., 2014a; Guo, 2014; Katepalli et al., 2017; Nedwed, 2011).
- New delivery systems such as the recently certified Boeing 727-based aerial platform introduced by Oil Spill Response, Ltd., which provides a global reach and an extended range of daily operations (Caetano and White, 2017).
- Gaining a better understanding of factors influencing dispersant/oil slick interactions such as the impact velocity of dispersant droplets of different size following release from spray systems (Ebert, 2008).
SUBSEA DISPERSANT INJECTION (SSDI)
Overview
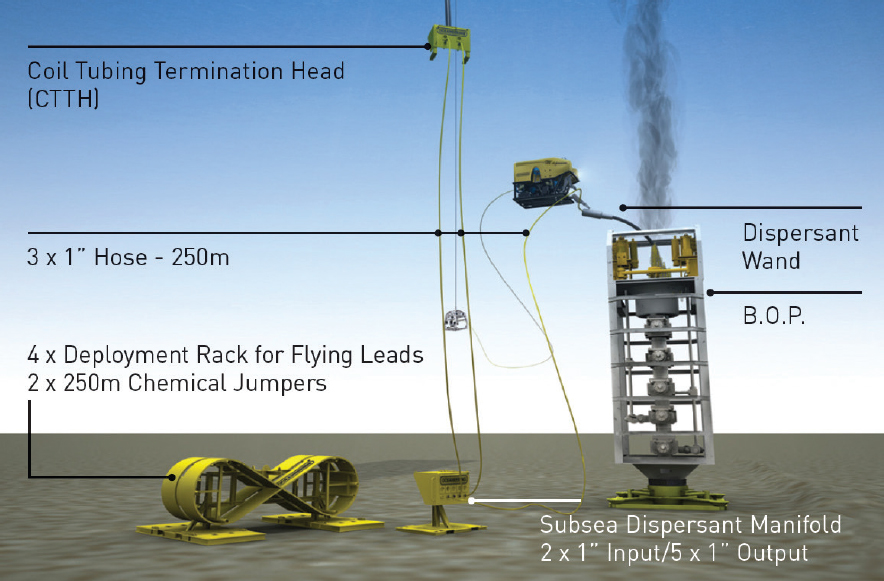
The response to the 2010 DWH oil spill is the first case where dispersants were applied at the wellhead on the seafloor. There are a few key distinctions between surface and subsea conditions. Near the release source, significant turbulence resulted in the jet of oil and gas breaking into a wide range of oil droplet and gas bubble sizes (Malone et al., 2019; Pesch et al., 2018). The use of SSDI (see Figure 6.1) is focused at the release point. Here, the encounter rate with the oil can be maximized with the intention of reducing droplet sizes to delay and perhaps even to stop the ascent of the droplets, thereby facilitating the biodegradation process.
Benefits
The encounter rate with SSDI is potentially higher at the oil release point, compared to aerial dispersant application to a spreading surface slick, because the dispersant is applied directly to the oil source as it enters the ocean. Because of this, lower DORs are expected to be sufficient to effectively disperse the oil, with values of 1:100 (1%) or less having been demonstrated successfully in the laboratory (Brandvik et al., 2013, 2014a,b, 2017a, 2018, 2019a,b). The trajectory of rising oil from depth is influenced by deep ocean currents (horizontally) and the buoyancy of the dispersed oil droplets (vertically). This leads to the dispersed oil being vertically distributed over a greater depth range than would occur with surface application, which is limited to the top few meters of surface water. Biodegradation will occur in these cold deep waters. Measured dispersed oil concentrations were consistently below 5 ppm at a distance of 1 km from the DWH wellhead (Coelho et al., 2011). SSDI can run continuously in almost all weather conditions, using a DOR that is less than half the volume typically needed for surface applications (IPIECA-IOGP, 2015). The operation takes place at a single location at the wellhead release point, which simplifies the operation (compared to surface dispersant use). This makes SSDI more manageable and reduces manpower requirements and safety concerns compared to other response methods.
SSDI may reduce the potential for responder exposure to hydrocarbon vapors at the surface (Gros et al., 2017; see Chapter 4), which provides a worker health protection factor. In support of this, a recent Comparative Risk Assessment (CRA) project involving several modeled scenarios concluded that SSDI substantially decreased surface slicks and shoreline oiling; increased
hydrocarbon biodegradation at depth; decreased atmospheric volatile organic compound (VOC) emissions; and increased dissolution rates of rising oil such that floating oil contained much less soluble and semi-soluble hydrocarbons (benzene, toluene, ethylbenzene, and xylene; polycyclic aromatic hydrocarbons [PAHs]; soluble alkanes). These factors reduced human and wildlife exposures to VOCs (French-McCay et al., 2018b).
Unlike most other operations, SSDI can progress continuously through day and night provided that required dispersant volumes can be supplied to the site. The SSDI reduces the amount of oil reaching the surface and thereby reduces the potential for oil to reach the shoreline or impact birds and mammals.
Limitations
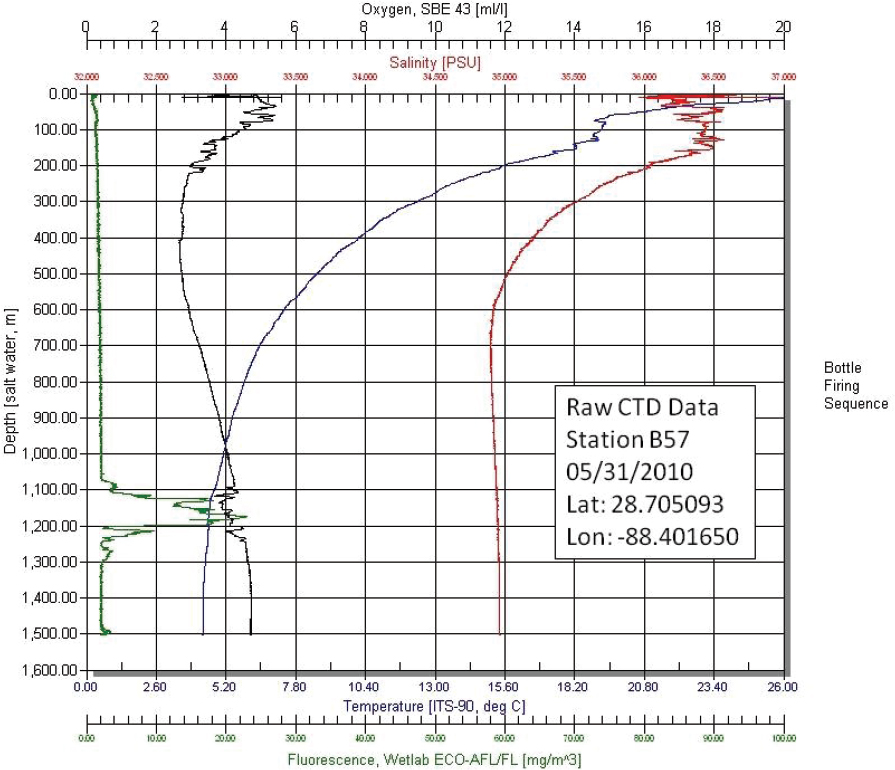
Because SSDI has been used only once, less is known about the biological and long-term impacts on the ecosystem than for other responses. Localized increases in toxicity within the water column are expected due to enhanced oil bioavailability from droplet formation, and as the oil is biodegraded, a measurable reduction in dissolved oxygen has been reported (Kessler et al., 2011a; see Figure 6.2).
Aerobic biodegradation is a key process for removing dispersed oil from the ecosystem by transforming hydrocarbons to CO2 and water, but depending on site-specific conditions, concentration of dispersed oil, nutrient levels, etc., there may be mitigating circumstances where it is less effective. For example, suspended droplets may be incorporated into marine snow and carried to the seafloor (Passow, 2016; see Chapter 2) where they may biodegrade more slowly or impact
benthic organisms. In general, there is less known about the biota at depth to judge the potential impacts of dispersed oil on the ecosystem.
In deepwater spills it may be difficult to monitor the effectiveness of the dispersant, although instruments and procedures have been developed post-DWH (API, 2013). Furthermore, while SSDI may be effective in some shallow-water spill scenarios, it may not offer substantial benefits in shallow blowouts (see CRA-2 case study below). As with surface application, specialized equipment is required, and special approvals may be required. The application of dispersants, even at depth, can be perceived negatively by the public.
Effectiveness
Recent laboratory testing on light crude oils suggests that in cases where proper injection methods and DORs are used, SSDI effectiveness may approach 100%. For comparison, surface
dispersant application typically begins at a DOR of 1:20 (5%), whereas DORs ranging from 1:50 to 1:100 (2% to 1%) can be effectively used with SSDI (Coolbaugh and Cox, 2015). This is due to the higher encounter rate of dispersant directly to the freshly released oil stream, where the oil is warm (low viscosity), not emulsified, and in a region of high turbulence. For the purposes of offshore spill planning, subsea dispersant “application efficiency” is typically assumed to be 80%, meaning that 20% of the dispersant is lost and the remaining dispersant volume treats the oil with 100% efficiency. This simplified assumption provides a conservative estimate of the potential environmental impacts that might occur in the water column.
SSDI effectiveness is visually evident to trained observers looking at real-time video feeds provided by remotely operated vehicle-mounted video cameras positioned adjacent to the dispersant injection wand, but this is purely a qualitative indicator. Quantitative confirmation of droplet size reduction can be obtained via a particle size analyzer located above the dispersant injection point (e.g., Davies et al., 2017). Laboratory studies have demonstrated significant changes in the appearance and DSD of subsurface oil releases (Brandvik et al., 2014a; Coolbaugh and Cox, 2015).
Technological Advances
While subsea dispersant application is not a new concept, its use during the DWH response represents the only documented example of an application at such a scale and depth (IPIECA-IOGP, 2015). A number of lessons were learned from the extended use during the response, and projects have been undertaken to
- Better understand factors that influence dispersed oil droplet size—for example, dispersant type, DOR, oil type, and mixing energy (Brandvik et al., 2013, 2014a,b, 2018, 2019a,b);
- Develop a bench scale effectiveness test in order to facilitate the screening/testing of new products and conditions in an efficient manner (Coolbaugh and Cox, 2015); and
- Recommend scientific protocols to monitor environmental effects of SSDI use (NRT, 2013).
AT-SEA MECHANICAL RECOVERY
Overview
Mechanical containment and recovery is the process of physically removing oil from the water surface through the use of equipment such as skimmers and booms to divert and collect it. Upon its collection, this oil is either disposed of or, in some cases, it may be possible to recycle it, thereby preventing or minimizing effects to sensitive nearshore and offshore habitats. Environmental conditions such as hours of daylight, winds, and waves will influence the success rate of on-water mechanical containment and recovery. In most instances, mechanical recovery is the primary or preferred treatment option.
Benefits
This response option physically removes surface oil from the water, and it is the only option able to remove weathered oil. As a result, public understanding and acceptance of use of on-water mechanical recovery is high. When floating oil is collected in the offshore environment, the potential threat to nearshore and shoreline ecosystems can be significantly reduced because less oil is available to become stranded and the need for shoreline protection and recovery operations is likely to be reduced or even eliminated. During offshore recovery operations, there tends to be little
wildlife impact. Also, mechanical recovery is a commonly practiced response option that offers a wide range of well-understood equipment options. In some cases, the recovered product can be reprocessed for later use.
Limitations
While mechanical recovery is a desirable spill response tool, it requires the availability of vessels that can deploy the equipment and have sufficient recovery and storage capacity. Support vessels may have a limited capacity resulting in a significant period of elapsed time (i.e., days) before mechanical recovery can be performed on a large scale. Once on the sea surface, spilled oil has a tendency to spread and form thin sheens, which significantly reduces the ability to collect surface oil efficiently. The longer the spreading process continues, the thinner the oil will become and the less likely it is that it will be recovered. With traditional boom, vessel speeds are restricted to less than a knot to prevent oil entrainment, which limits encounter rates. Some types of skimmer systems may collect large volumes of water with the oil, requiring further oil–water separation after collection, additional equipment, and storage capacity. Waste from all the equipment used, particularly absorbent materials and oily debris, represent a waste management challenge.
The low encounter rate of mechanical systems makes it labor and equipment intensive to mount an effective spill response. In addition to the actual encounter rate, external conditions such as weather and hours of daylight can limit mechanical response. Ocean boom begins to experience containment failure when sea states approach wave heights higher than 2 m. While day length is not a major consideration in the continental United States, limited daylight during the winter months in northern latitudes may reduce the number of operations that can occur each day. Floating ice poses an additional constraint in Arctic waters. Finally, skimmer system configurations may need to change as the oil becomes more weathered, which can result in response delays.
Effectiveness
Mechanical recovery in the offshore environment is affected by weather conditions, the extent of oil weathering, and the actual encounter rate. Even under favorable conditions, experience from previous offshore spills has shown that recovery rates of between 5% and 10% of the total volume are the maximum to be expected—the rest being lost to the atmosphere, the ocean, or deposited on a beach. During the DWH spill response the estimate was less than 4% (Federal Interagency Solutions Group, 2010).
Technological Advances
Mechanical containment and recovery techniques have been used for quite some time, but there continue to be improvements. As an example, innovative enhancements to oleophilic skimmer designs have served to increase potential recovery rates significantly, either by incorporating grooves into disc and drum design (Broje and Keller, 2006) or by the addition of high surface area fabric to skimmer surfaces (Hobson, 2013; SL Ross, 2008). A key focus of the spill response research community is increasing the ability to operate at higher vessel speeds or in faster currents. A particular approach has been to incorporate a calm area at the apex of a boom that prevents entrainment and oil loss from the boom even at 3-5 knots tow speed (USCG, 2002). By pairing such a containment system with paravane, it becomes possible to operate at higher speeds with only one vessel (Chopra and Coolbaugh, 2016).
CONTROLLED (IN SITU) BURNING
Overview
The process of employing in situ burning (ISB) during an offshore oil spill response consists of the mechanical collection of oil in a manner similar to on-water recovery, but it uses specially designed fireproof booms, followed by its removal through burning. The oil must be sufficiently thick in order to initiate ISB. This spill response option has a possible advantage over mechanical recovery in that it removes the need to store and dispose of recovered oil. As in mechanical containment and recovery, ISB has similar operational limitations associated with weather and daylight hours because it relies on the use of a boom-based system. In practice, ISB is optimally performed during daylight hours so that the burn may be safely ignited, managed, monitored, and tracked. Wave heights of less than 1.2 m, somewhat lower than for mechanical containment and recovery, are preferred.
Benefits
ISB can be highly effective at permanently removing encountered oil from the water and reduces the total volume of oil that would need to be collected and disposed. Because most crude oils will burn, ISB can be an effective technique for a wide range of oil spills. Because of its potential effectiveness and reduced requirements for collection and disposal, ISB can serve to minimize the extent of a spill and reduce the resources, including time, required during a response.
Limitations
ISB requires oil that has limited weathering, as the loss of light end components or inclusion of water can prevent the ignition of a burn. The oil must be more than 3 mm thick to allow ignition, making it impractical for thin slicks. In the event that populated areas are present downwind of a burn, air quality concerns may exist in some jurisdictions due to the possible presence of combustion-related gases and particulate materials, especially those of very small size. The black smoke plume is perceived as having a significant impact on people and the atmosphere. As lighter crude oil components burn, burn residues may become more dense and sink into the ocean where they are not recoverable. Optimal ISB performance occurs during daylight hours when the burn may be safely ignited, managed, monitored, and tracked, with wave heights of less than 1.2 m. ISB requires specialized equipment and training. The availability of effective fire boom, which in practice has been found to have a limited lifetime, is a consideration for any large-scale, prolonged response operation such as a well blowout. A key consideration in the decision-making process to use ISB is whether it is feasible with respect to incident specific environmental conditions and existing regional government approval policies; burn plans and special approvals are likely to be required. Many countries have not established ISB approval processes.
Effectiveness
The ISB response tool is highly dependent on the incident-specific environmental conditions and potential encounter rates. A burn can remove oil until a minimum thickness around 1 mm remains. When the oil thicknesses in the boom are greater than 1 centimeter, the burn efficiencies can exceed 90%. During the DWH response, where the sea was quite calm over extended time periods, existing estimates indicate that about 5% of the oil was removed by ISB (Allen et al., 2011; Federal Interagency Solutions Group, 2010).
Technological Advances
Prior to the DWH spill response, ISB had only been used occasionally. Although it had never been used on the scale as that of the DWH response, the technique was studied on a regular basis (Mabile, 2013). The usual method for thickening a slick is to mechanically contain the slick in special fire booms, some of which were refined following the DWH response (IPIECA-IOGP, 2016). While fire booms are able to withstand the heat of a burn for several sustained burns, they will ultimately be unusable after a few days.
To move beyond this limitation, the use of surfactant-based herding agents presents an opportunity to perform ISB without physical containment. By applying these products around the edge of a slick, the surface tension is modified, the slick area contracts, and the oil becomes thick enough to support combustion. This approach has been demonstrated several times, and it has been shown that the slick will remain thickened for several minutes before the herding effect ultimately dissipates, during which time ignition is possible (Buist et al., 2011). The environmental conditions in which herders will be effective are not fully established.
Other work is currently focused on enhancing burn effectiveness by incorporating metallic heat sinks within the combustion zone for more complete combustion and by integrating a skimming/burning system, which would alleviate the need for waste storage or fire-resistant boom in locations with logistical challenges (Rangwala et al., 2015).
MONITORED NATURAL ATTENUATION (NATURAL RECOVERY)
Overview
Natural attenuation involves no active human intervention aimed at changing the fate of the spilled material. In cases where distance from shore or weather conditions prevent active response (e.g., Argo Merchant, SeaRose platform), this may be the likely response option. In association with this analysis, it is considered the baseline against which other response options may be compared. With natural attenuation, the spilled oil moves with the winds and currents until it eventually evaporates, dissolves, biodegrades, disperses, or strands on the shoreline. Stranded oil will continue to weather and will gradually biodegrade, be incorporated into the sediments, or persist as surface residues. It is possible that some of the relatively fresh oil may be remobilized from where it initially stranded and then transported to other locations before it weathers further, biodegrades, or is deposited permanently. The fate of the oil is generally monitored to determine both if it is attenuating as predicted and if an active response is necessary.
Benefits
Natural attenuation may be appropriate in cases where offshore spills do not threaten shorelines, sensitive habitats, and protected species, or when high sea states exist and natural dispersion is expected to prevail and other response options may not be safely deployed (e.g., during winter months and storm events). In cases where active spill response activities are not appropriate (e.g., when the presence of responders and equipment can damage certain sensitive shoreline habitats), allowing the oil to degrade naturally could be preferable. Additionally, natural attenuation may be necessary in the event that recovery and response are not possible, for whatever reason.
Limitations
By not actively intervening following a spill, there is a likelihood that the public could infer that not enough is being done to respond because there is typically an expectation that everything
possible will be done to minimize the spill impact and protect the environment. By its very nature, natural attenuation is a passive tool which will not prevent impacts to high value shoreline habitats if oil were to reach the shore. For offshore slicks, natural attenuation could lead to the presence of oil slicks on the water surface for an extended period of time; for example, hours for light oils during energetic sea states or weeks to months for heavier or emulsified oils during calm sea states. Active monitoring of the area that may be affected by a spill is required because changes in winds and currents may later move the oil into an area where response is necessary. The heavier and emulsified oils that result from natural attenuation are more difficult to respond to if needed. Experience has shown that the recovery of oiled shorelines can range from weeks to months to years, depending on what was spilled and what kind of environmental conditions existed at the time of the spill (e.g., sea state, sunlight intensity, rain, or magnitude of processes contributing to shoreline erosion). Natural attenuation may not be appropriate in situations where it will affect emergency response activities at an offshore platform site, because an active response is more suitable to reducing exposure potentials for surface vessels and personnel to the VOCs of oil and their associated health and safety risks. At a minimum, a conceptual model, followed by a mathematical model, is required for the spill environment and all risk receptors. Monitoring must be done to verify that the model of natural attenuation is proceeding as predicted in regard to these risk receptors. If it is not, then other control methods would be required. If it is meeting the model for natural attenuation, then any requirements for environmental sampling can gradually be relaxed.
Technological Advances
Direct water and sediment sampling for biogeochemistry, remote sensing, and real-time modeling have made advances since the DWH spill. New models of spill fate and effects with and without the use of dispersants (see Chapter 2) can greatly aid if and when monitored natural attenuation is applicable.
Effectiveness
Natural attenuation can be an effective option, especially in cases where spilled oil is relatively light and is expected to evaporate/disperse/dissolve relatively quickly; where a spill is not expected to impact sensitive or high value ecosystems; or if extreme weather conditions prevent a safe spill response while also providing the energy required to effectively disperse the oil naturally. Even aggressive remediation techniques should have monitored natural attenuation as the final solution because this will not only save time and resources and will minimize harmful effects of aggressive mediation techniques but also will ensure that the environment and risk receptors are returning to their pre-spill state.
ADDITIONAL CONSIDERATIONS
Dispersant Regulatory Approval Processes
As previously discussed, dispersants represent a potentially significant tool within the spill response toolbox, especially when considering a large-scale, offshore spill scenario. However, while the potential use of dispersants during a response may be technically feasible, regulatory considerations need to be taken into account because they will likely define what products may be used and under what circumstances. To put this in perspective, following the use of solvent-based degreasers during the Torrey Canyon spill response in 1967, it was recognized that the use of potentially toxic materials to respond to a spill can make a situation worse. With this in mind, a key
aspect of a robust regulatory regime is to have a transparent process of deciding which dispersant products may be used and under what scenario-specific conditions.
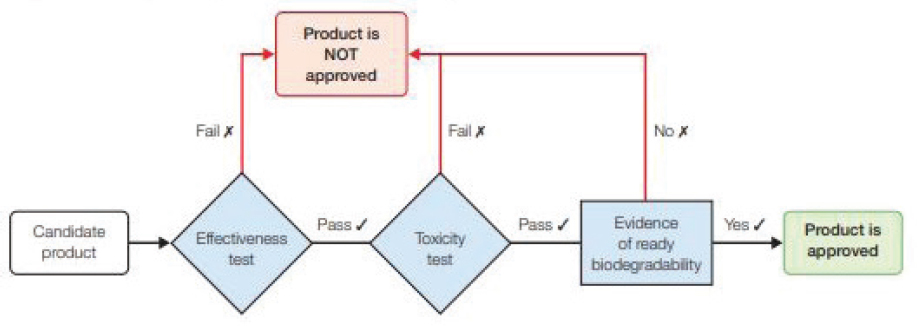
In the case of product approval, there are typically two main considerations: the effectiveness of the product and its relative toxicity. Figure 6.3 provides a simple schematic of a product approval process that is used in a number of locations around the world (IPIECA-IOGP, 2014).
In the United States, the U.S. Environmental Protection Agency (EPA) is responsible for managing the process whereby products are listed for possible use. A listing of those products (see Table 6.2) that are available to be considered for use in the event of a spill (i.e., the Product Schedule) is available within Subpart J of the National Oil and Hazardous Substances Pollution Contingency Plan. EPA proposed amendments to Subpart J in 2015 to clarify and update Product Schedule listing procedures. These potential updates included changes to effectiveness and toxicity testing. Public comments were due on or before April 22, 2015. No action has been taken since then.
While products are likely to vary by chemical composition, modern, commercially available dispersants consist of surface active agents (surfactants) and solvents that are generally much less toxic than the materials that may have been used decades ago. During the DWH oil spill response, the Centers for Disease Control released the statement that the “ingredients [of Corexit® 9500A and Corexit® 9527A] are not considered to cause chemical sensitization; the dispersants contain proven, biodegradable and low toxicity surfactants” (CDC, 2010).1
A different perspective is provided by the information listed in Table 6.3, which shows the countries in which three particular dispersants have been approved for possible use during a spill response (Carter-Groves, 2014). In particular, following the DWH oil spill, industry established a Global Dispersant Stockpile (GDS) composed of three dispersant products placed strategically in easily accessible locations around the world. The three GDS dispersant products have been studied extensively and are viewed as having some of the broadest global approvals based on effectiveness and toxicity testing.
In the United States, during the response phase of an exercise or spill response, the Incident Command System is used to manage the decision-making process for the use of dispersants or other spill response options, with the Federal On-Scene Coordinator having the lead responsibility. Similar systems are used around the world during emergency responses, sometimes known as the Incident Management System.
By having clear regulatory requirements in place, the decision-making process should be able to proceed in such a manner that the window of opportunity for effective dispersant use is not lost.
___________________
1 See https://www.cdc.gov/nceh/oil_spill/docs/Oil%20Spill%20Dispersant.pdf.
TABLE 6.2 U.S. Environmental Protection Agency National Contingency Plan Listing of Dispersants
| ACCELL CLEAN® DWD | JD-2000™ |
| BIODISPERS | MARE CLEAN 200 |
| COREXIT® EC9500A | MARINE D-BLUE CLEAN™ |
| COREXIT® EC9500B | NEOS AB3000 |
| COREXIT® EC9527A | NOKOMIS 3 |
| D SEA BRAT #4 | NOKOMIS 3-AA |
| DISPERSIT SPC 1000TM | SAF-RON GOLD |
| FFT-SOLUTION® | ZI-400 |
| FINASOL® OSR 52 | |
SOURCE: EPA; https://nepis.epa.gov/Exe/ZyPURL.cgi?Dockey=P100W60V.txt.
TABLE 6.3 National Approvals for Global Dispersant Stockpile Products
| Dispersant | Countries of Approval |
|---|---|
| Dasic Slickgone NS | Australia, Benin, Cyprus, France, Greenland, India, Israel, Libya, Malaysia, New Zealand, Nigeria, Norway, Philippines, ROPME countries (Bahrain, Iran, Iraq, Kuwait, Oman, Qatar, Saudi Arabia, United Arab Emirates), Singapore, Togo, United Kingdom |
| Finasol OSR 52 | Angola, Australia, Benin, Brazil, Cameroon, Congo, Croatia, Cyprus, Egypt, France, India, Indonesia, Israel, Kazakhstan, Malaysia, Morocco, Nigeria, Norway, Philippines, Portugal, ROPME countries (Bahrain, Iran, Iraq, Kuwait, Oman, Qatar, Saudi Arabia, United Arab Emirates), Singapore, Thailand, Togo, United Kingdom, United States, Uruguay |
| Corexit EC9500A | Angola, Benin, Brazil, Chile, Israel, Libya, New Zealand, ROPME countries (Bahrain, Iran, Iraq, Kuwait, Oman, Qatar, Saudi Arabia, United Arab Emirates), Singapore, Trinidad, United States |
NOTE: Correct at the time of publication. SOURCE: Oil Spill Response Limited.
In the absence of clear regulations around their use, discussions about their benefits and limitations may be protracted, especially during the initial reactive stages of an emergency response, and the opportunity to derive environmental benefit could be diminished.
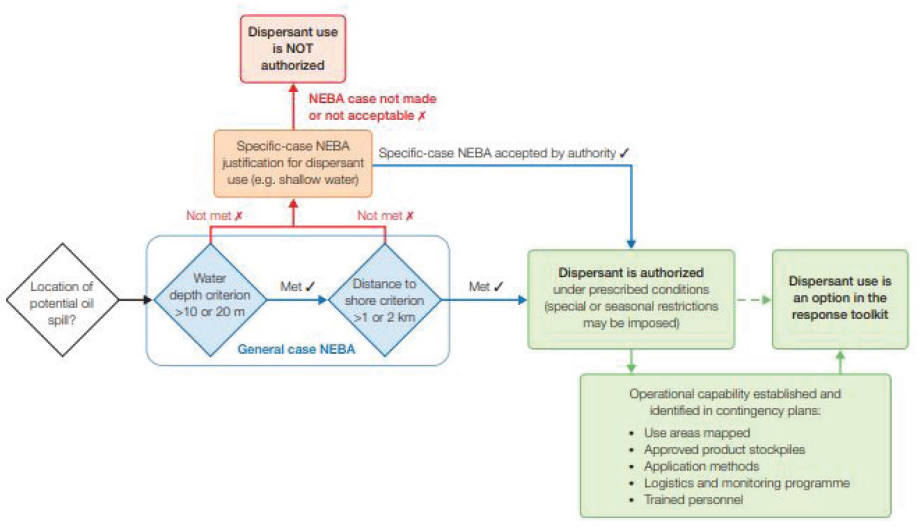
Figure 6.4 highlights the steps that are typically used to determine whether or not an approved dispersant may be applied during a specific spill response scenario (IPIECA-IOGP, 2014).
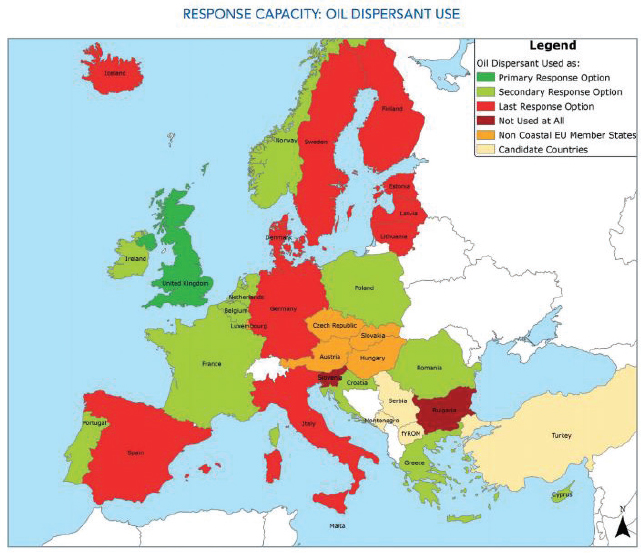
While a number of countries consider the use of dispersants as either a primary or a secondary response option and have it included in their national contingency plans, it would be beneficial to encourage global consistency with respect to the processes for approving individual dispersant products and allowing for their use (Coolbaugh et al., 2017). As exemplified in Figure 6.5, for approval in Europe, it is likely that there will be significant differences within regions regarding the possible use of dispersants, and this may lead to complications that might hinder an effective response to a spill that could affect more than one country, a topic that will be discussed below.
Transboundary
It is generally considered that offshore oil spills do not respect international borders. Whether a spill scenario takes place in the Gulf of Mexico, the Strait of Juan de Fuca, or elsewhere in the world, one thing is known: Oil on the water moves over time, and discussions between potentially affected regions should take place before a response is needed. The development of agreements is key, especially when the complexities and potential barriers related to transporting people and equipment across international borders can be a challenge, and especially when time may be of the essence. The return of equipment and personnel in a timely fashion should be considered as well.
A number of international conventions and agreements are currently in existence that help facilitate what might become a transborder spill response. For example, the United Nations Convention on the Law of the Sea (UNCLOS) entered into force in 1982 as a foundational component encouraging international cooperation. Specific articles within the convention focus on preventing, reducing, and controlling marine pollution, and they include the creation of international standards and recommended practices for cooperation as well as defining a process for notifying others who may be affected by a spill. In this respect, UNCLOS has been thought of as the overarching convention that supports others in the actual implementation of various international arrangements, such as the International Maritime Organization (the UN agency responsible for the safety and security of shipping and the prevention of marine pollution by ships) Convention on Oil Pollution Preparedness, Response and Cooperation, which was put into force in 1995 (Chazot and Rhodes, 2017).
Organizations and activities of more regional natures exist and occur, often with an eye toward enhancing cooperation and preparedness across a number of different countries. An example is the Global Initiative program that was created in 1996 following the efforts of the International Maritime Organization and IPIECA to build spill response capacity. Today, Global Initiative programs are present in West Africa, Southeast Asia, and the Black and Caspian Seas region. Other programs have been considered for the wider Caribbean and South America. Through the efforts of these programs, countries that did not have national plans have made major strides. A significant part of the Global Initiative program is to have regular training courses and exercises during which specific focus areas of the member countries can be highlighted and discussed (Coolbaugh et al., 2014). A topic of particular emphasis that has arisen over the past several years is that of transboundary spills and how to respond to them effectively. This is not unique to the Global Initiative regions.
For example, a recent multiyear Mexico–United States (MEXUS) exercise included the possibility of the transboundary movement of oil from U.S. to Mexican waters. Participants from both countries were able to discuss the possible challenges of a transboundary spill and how to address them. For reference, the MEXUS Plan was created following the Ixtoc I well blowout in 1979 in order to facilitate cooperation between the two countries by providing a framework of coordinated operational procedures in case of a spill.
The recent exercise considered such things as specific government agency involvement in customs and border-related issues and various waivers to expedite transfer of equipment and personnel (Drieu et al., 2017).
Arctic
The presence of ice provides additional challenges to oil spill response as it makes reaching the oil more difficult, can foul booms and skimmers, and dampens wave energy. It is also often associated with extreme cold that further inhibits response options. At the same time, these same conditions reduce oil weathering, allowing burning and dispersants to be effective over a longer
period than in more temperate waters, and ice can reduce the spreading of oil. How oil and ice interact depend on the type of ice and its concentration (Pegau et al., 2017; Venkatesh et al., 1990).
Another important consideration for oil spill response is that most locations with sea ice are remote, limiting the ability to stage people and equipment, and making the storage and disposal of recovered oil difficult. An important social consideration in the Arctic is that the people have a subsistence lifestyle that is dependent on the marine ecosystem.
Interest in oil and gas development and shipping in the Arctic has led to several reports on oil spill response capabilities and research needs (Bjerkemo, 2013; CRRC, 2017; Dickins, 2004; Holland-Bartels and Pierce, 2011; Lewis and Prince, 2018; NPC, 2015; NRC, 2014; Pew Charitable Trusts, 2013; Pew Environment Group, 2010; Potter et al., 2012; Solsberg, 2008; USARC, 2012; Wilkinson et al., 2017) as well as numerous research projects and programs (e.g., BSEE Arctic Oil Spill Response Research, Oil in Ice Joint Industry Program, and Arctic Response Technology JIP). Lewis and Prince (2018) provide a recent review of dispersant use in the Arctic. The Coastal Response Research Center effort examines in detail what is known about dispersant use in the Arctic. Recent research activities examined remote sensing and advancing response technologies. The use of self-propelled skimmers in ice has been tested, and new skimmers and sorbent materials have been developed. Primary issues with mechanical recovery include the viscosity of the oil; operating booms in an ice environment (although ice can act as a boom); fouling of skimmers by ice; and freezing of skimmer surfaces. Work on in situ burning has focused on the application of chemical herders to thicken the oil to allow a burn (Buist et al., 2008).
In regard to dispersants, some of the recent research with dispersants includes the use of propeller wash as an energy source for mixing (Daling et al., 2010); examining the dispersability of oil frozen in ice (CEDRE, 2016); the fate of dispersed oil under ice (Beegle-Krause et al., 2014); and the effectiveness of dispersants in slush and frazil ice (SL Ross, 2016). Oil frozen in ice was found to be dispersible after 3 months within the ice (CEDRE, 2016). Oil with dispersant frozen in ice was dispersible, but to a limited extent compared to applying fresh dispersants. Fresh oil can be dispersed in frazil ice if mixing energy exists, but the oil weathers and the effectiveness of dispersants declines with time (SL Ross, 2016).
Of particular concern for dispersant use in the ice environment is the issue of reduced mixing energy due to the dampening of wave action by the presence of ice. For dispersants to be effective there must be some mixing energy present. In a broken ice environment, the relative movement of ice provides some mixing energy (Brandvik et al., 2010). The use of propeller wash from a vessel was found to be a viable source of mixing energy (Daling et al., 2010). In many cases, however, mixing energy may be limiting.
UNCERTAINTY IN DECISION-MAKING TOOLS
A comprehensive evaluation of uncertainty in the model estimates described above will be critical for building further acceptance for use in decision making during oil spill response. Formal uncertainty analysis for human health and ecological risk assessment has a rich literature base in its application to decision making associated with implementation of several major environmental acts, including the Clean Air Act, the Clean Water Act, etc. (NRC, 1983, 1994, 2009). Uncertainty can be divided into aleatory (or inherent) uncertainty (also referred to as variability) and epistemic uncertainty (due to limited knowledge of the underlying physical, biological, or chemical processes) (Hoffman and Hammonds, 1994). Aleatory uncertainty can often be incorporated in a straightforward manner; French-McCay et al. (2018b) incorporated the effects of weather variability on oil spill fates using Monte Carlo simulation to find the median case for shoreline and surface impacts. French-McCay and colleagues also incorporated some epistemic uncertainty by looking at two
levels of ecotoxicity thresholds. However, in neither case were final results presented that concisely illustrate these uncertainties on the overall risk assessment.
It is also important to note that the modeling by French-McCay et al. (2018b) does not explicitly consider human health risk, although modeled surface VOC levels have been interpreted from a human health perspective (Crowley et al., 2018).
Many federal regulations designed to protect public health are based on application of probabilistic risk assessment (PRA) to estimate the proportion of the human population whose predicted exposures may exceed an established acceptable risk level (as described in Chapter 4 for PAH exposure from fish consumption after an oil spill). Monte Carlo simulation, Bayesian methods, and other approaches are widely used for uncertainty propagation in PRA modeling (Burmaster and Anderson, 1994; Lester et al., 2007). This probabilistic approach can become problematic if exposure to risk levels above the acceptable level, even if estimated at ≤ 1%-5% of the total population, is largely restricted to one specific community. Subsistence fishing communities would be an example of a vulnerable population of concern in oil spill response decision making, as described in Chapter 4.
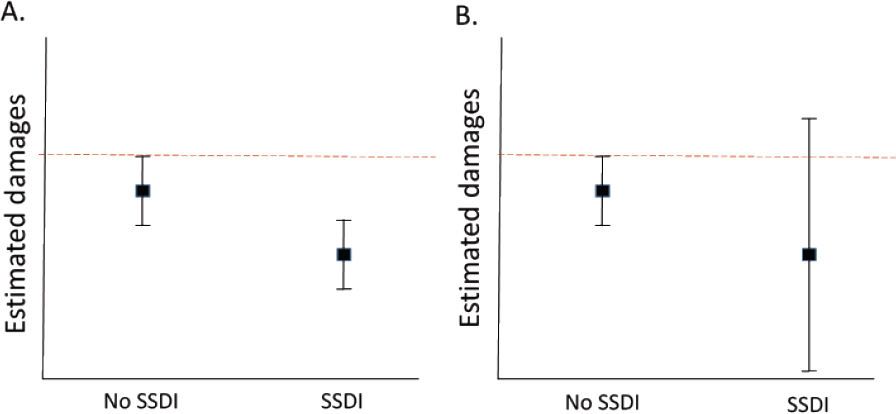
Given that few studies have specifically assessed ecological and human health effects associated with SSDI, the two hypothetical modeling results shown in Figure 6.6 suggest that uncertainty on the effects of SSDI may be considered too great if panel B were the modeled estimate, but not if panel A were the estimated uncertainty intervals (UIs). In the case of panel B, even if the central probability estimate is less damages with SSDI, under a PRA framework, decision makers may decide it is more important to protect against an even small probability of a higher level of damages, if that damage level crosses a threshold that would be considered unacceptable.
Treatment of uncertainty is largely dependent on first establishing equivalencies in the risk assessments to be compared. For example, CRAs employed to quantify and compare human health risks using the disability-adjusted life year start with the same foundational datasets on life
expectancy and disease states to minimize differences in the treatment of aleatory uncertainty, and consider sources of epistemic uncertainty in exposure and exposure-risk relationships in a consistent manner (Danaei et al., 2005). UIs are estimated not only using quantitative empirical data; often they will incorporate qualitative data (expert judgment) to address epistemic uncertainty and build probability distributions for parameters when empirical data are limited (Budnitz et al., 1998; Morgan, 2014; Rabl and Spadaro, 1999). This human health application of CRA has subsequently been incorporated into life cycle analyses and external cost models assessing and comparing human health, ecological, and natural resource damages across different systems for electricity generation or nuclear weapons stockpiling, for example (Helton, 2011; Huijbregts et al., 2017; Jolliet et al., 2003; Krewitt, 2002; NRC, 2009).
As models are being developed to describe more complex systems, clear and transparent methods for treatment of both types of uncertainty will be useful for informed decision making. In some cases, a comprehensive qualitative assessment of uncertainty communicated to decision makers may be more practical given time and resource constraints, and absence of quantitative uncertainty analysis should not be used as grounds for inaction (Goldstein, 2011).
COMPARISON STUDIES OF RESPONSE METHODS
As discussed in the previous chapter and highlighted in Figure 5.3, there is considerable complexity in being able to understand how decisions about response options may impact environmental and human health. The complexity of the potential environmental impacts, along with few real-world opportunities for scientific studies of spilled oil, has limited direct observations of the trade-offs associated with decisions about dispersant application. One notable exception is the Tropical Oil Pollution Investigations in Coastal Systems (TROPICS) experiment.
Tropical Oil Pollution Investigations in Coastal Systems
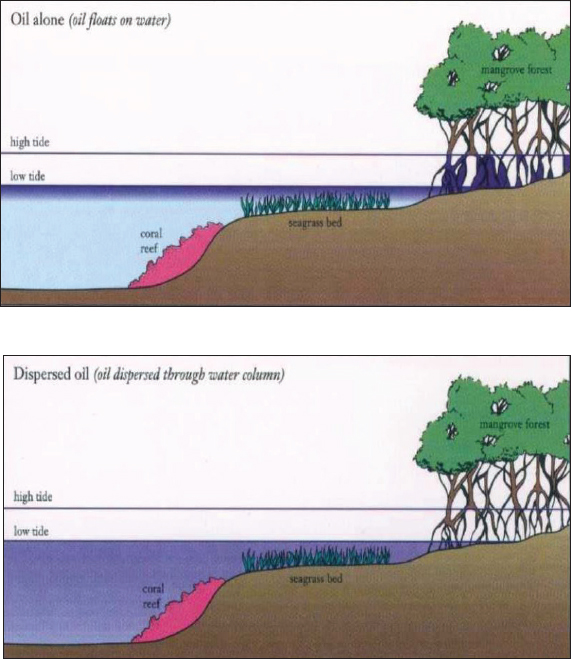
A well-documented Net Environmental Benefit Analysis (NEBA)-based dispersant effects study was undertaken in Panama starting in 1983. The TROPICS study established three study sites in order to evaluate the short- and long-term effects of undispersed and dispersed oil (along with a control site) on an ecosystem that included shallow-water coral, sea grass, and intertidal mangroves (Baca et al., 2014; see Figure 6.7). Periodically, the sites were visited, and the relative health of the sites was evaluated over a 32-year period. The most recent visit was in 2015 (Renegar et al., 2017b).
During the first phase of the study, results showed that in the first 10 years, the plot exposed to dispersed oil had recovered to pre-spill conditions, while the site that experienced undispersed oil still showed negative effects to the affected mangroves. In the ensuing years, the sites continued to display differences in recovery, and there is a clear demonstration that exposure to dispersed oil was less disruptive overall to the marine and intertidal communities.
While the water column species were exposed to higher levels of hydrocarbon during the initial and relatively severe conditions of the experiment, long-term health of the ecosystem was more affected by the impacts to the mangroves, and a neutral comparison of the ecosystem components would favor a decision to use dispersants. In different scenarios, it is entirely possible that other weighting factors defined by regional priorities could come into play that change the outcome of a NEBA, but in this case, the observations from the TROPICS study are focused only on the relative health of the ecosystem and do not encompass broader socioeconomic, human health, or other considerations that could be part of a Spill Impact Mitigation Assessment (SIMA) evaluation.
CRA SSDI Studies
Recent advances in numerical modeling have allowed the examination of the potential impacts of the application of dispersants and other response options through the use of the CRA tool. Numerical models that integrate all the different processes described in this report have allowed evaluations of environmental and human health impacts that may arise from different decisions in a response.
The first CRA of responses to a deepwater blowout is described in Bock et al. (2018), French-McCay et al. (2018a), and Walker et al. (2018a), and was funded by the American Petroleum Institute (API). We will refer to this study as “CRA-1” to differentiate it from the generic term “CRA” used to describe this general class of tool first introduced in Chapter 5, as well as from the CRA-2 study that extended the CRA-1 to other sites.
Before reviewing these studies, it is important for the reader to note two important characteristics of CRAs:
- Site specific. That means it can be difficult to extend what is learned at the CRA site to another site because of differing key physical factors, such as water depth, distance to shore, and atmospheric/ocean climatology, as well as differing key biological factors, such as habitat and species distribution.
- Model dependent. CRAs rely almost totally on integrated models. This removes subjectivity from the risk assessment of a SIMA or a Consensus Ecological Risk Assessment, but as indicated in Chapter 5, integrated models are imperfect. While many of the models are well validated at a process level, they are not well validated at the “integrated” level. In the case of the CRA-1, the integrated model has been validated to some degree with the DWH observations (Spaulding et al., 2017), but the risk assessments resulting from the CRA-1 have not been. That said, when an integrated model is used to compare various response options, many model uncertainties may tend to cancel each other, making the relative prediction more accurate than an absolute prediction.
CRA-1 Study Description
CRA-1 considered a single site with DWH-like oil flowing at 45 kb/d located in the northeastern Gulf of Mexico in 1,400 m of water about 222 km from the nearest coast (three times further offshore than DWH). The spill was capped at 21 days and SSDI started after day 6.
Figure 6.8 shows a schematic of the methodology. The 4-D (x, y, z, t) concentration fields of 19 hydrocarbon constituents were calculated using RPS ASA’s OILMAP DEEP in the nearfield and SIMAP in the farfield fate (see Table 5.1 for a summary of these models). To account for natural weather variability, 100 trajectory-only model runs were made using weather and current time series whose start date was randomly selected from regional models covering 5 years. From these 100 runs, a statistically rare event was chosen which ranked roughly in the 95th percentile in terms of
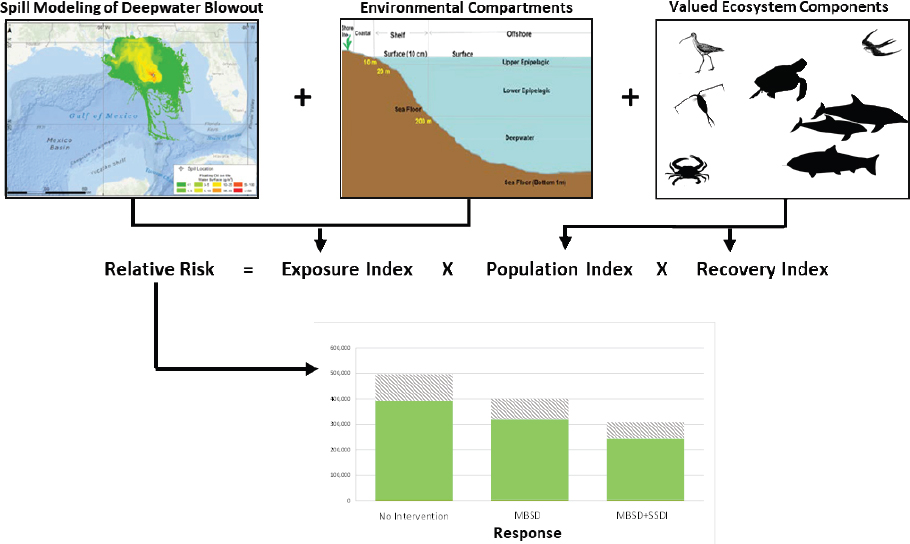
total oiled surface area and shoreline (5 of the 100 runs caused heavier oiling).2 This weather-current configuration was then used as the basis for further runs that compared oil mass distributions and ecological impact assuming four response options: no response, traditional responses (mechanical, burning, and surface dispersants), mechanical only, and SSDI plus traditional responses.
The ecological impacts of the blowout were estimated by calculating the exposure to hydrocarbon of valued ecosystem components (VECs) distributed geographically through environmental compartments (ECs). A total of 12 VECs, representing important species, were considered (e.g., zooplankton, birds, turtles, soft bottom macrobenthos) distributed through 13 ECs. In the vertical dimension, the ECs were segmented into seven levels (e.g., surface, lower epipelagic, etc.). In the horizontal cross-shelf dimension they were broken into four regions (shore, nearshore, shelf, and offshore).
Exposure scores were developed for each VEC in each EC. Toxic thresholds were derived from various sources, including the Natural Resource Damage Assessment (NRDA) for the DWH spill. Because these thresholds are highly uncertain, two thresholds were investigated: a lower (upper) toxicity threshold case is referred to as the low (high) threshold.
Once the exposure scores were determined for each VEC in each EC, further computations were performed to combine the exposure with the population density and species recovery time into a single number normalized by the maximum possible for the VEC in that EC (see equation in Figure 6.8). This “Relative Risk” varied from 0 to 1 with 0 meaning that there was no risk (exposure) and 1 indicating the maximum possible relative risk (i.e., the entire population was exposed to concentrations above the threshold during the entire simulation in the VEC with the longest recovery time).
CRA-1 Key Results
For this particular scenario, the CRA-1 study found:
- Mechanical and burning removed a small fraction (a few percent) of the oil. Surface dispersant removed significantly more but still less than about 15% at the time that surface oil peaked. In contrast, SSDI substantially reduced surfacing oil (~50%) and shoreline oil (~70%) more than any of the other responses did. However, SSDI substantially increased the volume of hydrocarbons in the water column, most of it at the plume trapping depth located at roughly 300 m above the seafloor.
- The “no-intervention case” always had the highest damage scores regardless of the toxicity threshold. In other words, some response was always better than no response. Traditional response (mechanical, burn, surface dispersant) reduced the no-intervention damage score by about 20% regardless of the assumed exposure thresholds.
- SSDI alone reduced the no-intervention damage score by 20% when a low toxicity threshold was assumed, but it decreased it by 40% for the high toxicity thresholds. In other words, SSDI was always at least as good as all other responses combined.
- The VECs that suffered the most damage depended on the assumed toxicity threshold. For the high threshold, birds dominated the damage score, while for the low threshold, turtles and mammals dominated. The ECs that suffered the most damage also depended on the assumed toxicity threshold. For the high thresholds, shoreline damage contributed most. For the low thresholds, the sea surface on the shelf and in deep water dominated.
___________________
2 A case that was near the median (50%) was also identified and studied, but because all the oil stayed far from shore, there was little nearshore impact under any response scenario.
The key take-away from CRA-1 is that SSDI significantly reduced the damage for the majority of the species (VECs) in the majority of the ECs. Surface species benefited most from the use of SSDI, while species at depth in deep water saw only a slight increase in damage. However, the reader is reminded of several caveats. First, these results make a number of assumptions which can be legitimately questioned; for example, few species are tracked and the interaction between species is not considered. Second, the CRA results have not been validated in any way by comparing them with observed damages. Finally, the results may change substantially if the scenario were to change.
Extension (CRA-2) Project Description
CRA-2 (French-McCay et al., 2018b) is an extension of CRA-1 intended to explore the sensitivity of the fates to changes in flow rate and blowout location (e.g., distance from shore and water depth). Two sites were considered in the north central Gulf of Mexico not far from the Macondo well. The shallower site was in 500 m and the deeper site in 1,400 m. The same oil and methods were used as French-McCay et al. (2018a) except (a) only the fates models (no effects) were run because of budget constraints, and (b) the median (50% non-exceedance) weather-current stochastic run was used instead of the 95% non-exceedance. Less oil reaches shore in the 50% case than in the 95% case, so this case will show fewer benefits of SSDI than a 95% case will, all else being equal. That said, the 50% case is much more likely to be realized than is the 95% case.
The CRA-2 plotted most results in terms of the droplet size to emphasize the importance of that parameter and to avoid tying results to a single droplet model. The droplet size can be related to a flow rate using one of the droplet models described in Chapter 2.
CRA-2 Key Results
Summarizing the results of a CRA-type study is challenging because model output is voluminous, and no single metric captures all the possible impacts of SSDI. One of the more revealing metrics is shown in Figure 6.9, which displays the peak mass distributed in the indicated environmental compartment (e.g., surface, ashore, etc.) at any time in the 66 days. These will not add up to 100% because each point on a curve is the peak for that component at any time. For compartments where oil accumulates over the course of the 66 days (sediment, ashore, degradation, and atmosphere), the curves will also represent the final mass distribution. In the subsequent discussion we will use the term “fates benefits” as shorthand to signify beneficial changes in the various environmental compartments. Such changes would include reductions in oil reaching the surface, seafloor, and atmosphere, or increases in degradation. A “cost” would be an increase in subsurface oil.
Figure 6.9 shows that the fates benefits of small droplets start to accrue when the median droplet size (d50) drops below about 1 mm in 1,400 m, while in 500 m of water benefits do not appear until about 300 µm. The discussion below will refer to these d50s as the “cutoff size.”
It should be noted that there are some fates benefits that are not captured in Figure 6.9. Probably the most important one is that the location of the surfacing oil will tend to shift downstream of the well when SSDI is used. That is because SSDI will generate smaller droplets than without. While these droplets may still be fairly large and rise to the surface quickly, the fact remains they will take longer to rise than without SSDI. This means that unless the currents are totally slack, some of the surfacing oil will be pushed by the prevailing currents further downstream of the well thus reducing the VOCs in the vicinity of high human activity. Unfortunately, neither the CRA-1 nor the CRA-2 provided metrics that quantify this benefit.
Figure 6.9 reveals that decreasing the droplet size can substantially increase fates benefits. For example, in 1,400 m, if the d50 is decreased by an order of magnitude from 3,000 to 300 µm, the
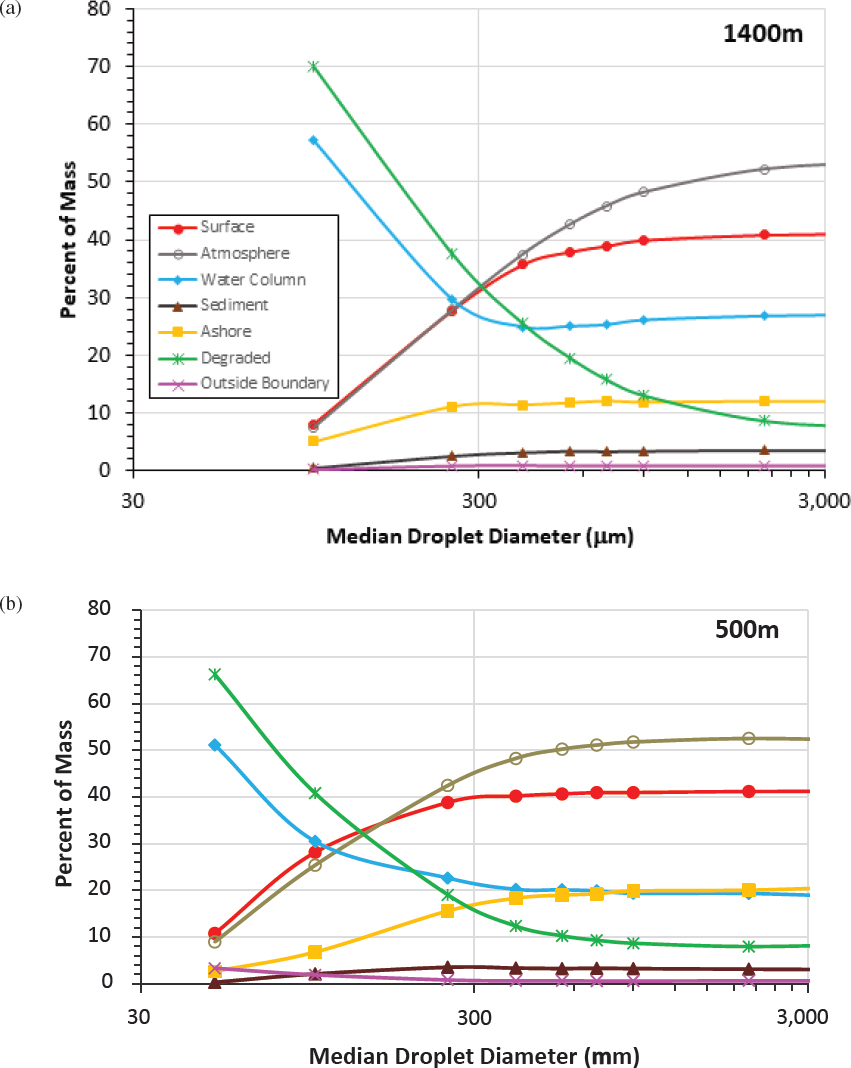
peak surface mass drops from 40% to 30% of the total, degradation is increased from less than 10% to more than 30%, and evaporation (atmosphere) is reduced from 50% to 30%. In the case of degradation and evaporation, these reductions apply to the final mass distribution as well as the peak mass. All the benefits identified above come at little cost because the mass in the water column remains stable. One sees similar behavior in the curves at 500 m, though as noted earlier, benefits start at a much lower cutoff size of 300 µm. The figure for 1,400 m also shows that as the d50 drops below 300 µm, most of the potential benefits accelerate rapidly. Most notable is the drop in the length of shoreline coated by oil. This highly nonlinear behavior means that there can be big benefits in driving the droplet size well below the cutoff size.
All the fates benefits outlined above can come at a cost in the form of an increase in the peak mass in the water column (blue curve in Figure 6.9). It is a cost because it means subsurface biota will be exposed to more oil. However, a detailed look at concentrations in the subsurface would likely show only modest increases because the hydrocarbon is being added to a thick (order 100 m), deep (200-400 m above bottom) intrusion layer being dispersed in three-dimensions.
Figure 6.9 shows that degradation plays a big role when the droplets fall below the cutoff size. Degradation does not include evaporation (this is included in the “atmosphere” compartment) but does include biodegradation and photooxidation of PAHs in the upper water column. Most of the biodegradation results from dissolution of aromatic hydrocarbons (French-McCay et al., 2018a).
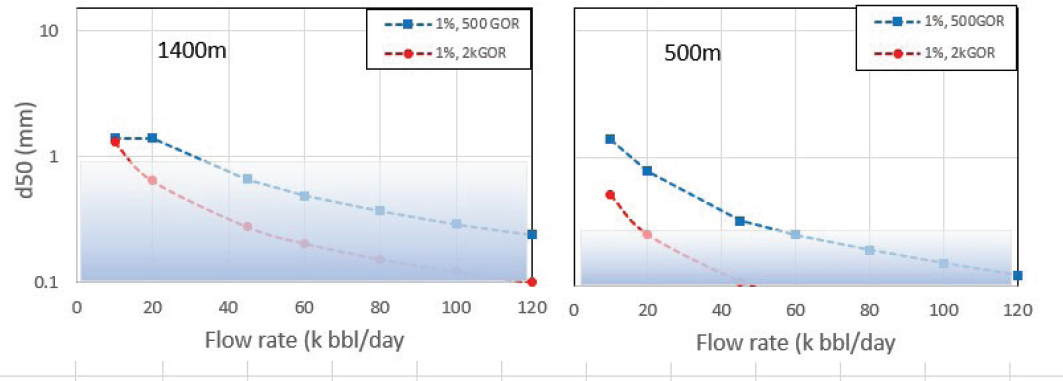
As pointed out above, the fates benefits of SSDI at 500 m do not start until the d50 drops below the critical size of 300 µm, roughly one-third that in 1,400 m. This makes sense because many of the droplets heading to the surface travel a much shorter distance in 500 m, thus allowing for less degradation and dilution. It might be tempting to conclude that SSDI is more beneficial in deeper water than in shallow water, but the presence of gas in a blowout complicates the situation. When in 500 m, the gas is less compressed then in 1,400 m and so the exit velocity will be higher and the droplet size smaller (Johansen et al., 2013) with or without SSDI. French-McCay et al. (2018b) explored this issue by looking at 28 blowout scenarios in their Table 2. Figure 6.10 below summarizes some of those results for two water depths with 1:100 DOR3 and two gas-to-oil ratios (GORs) (500 and 2,000). The gradated blue rectangular areas denote the flow rates where net fates benefits will result: that is, the d50 is less than the critical droplet size for that water depth. It is readily apparent that in 1,400 m, SSDI provides net benefits for almost any flow rate, while in 500 m the flow rate must be larger, especially for lower GORs. For example, at a GOR = 500, the figure shows that for flow rates less than about 40 kbbl/day there would be no fates benefits.4 One sees a similar, though less pronounced, trend at a GOR = 2,000: for example, in 500 m, there are few benefits for flows less than 20 kbbl/day, while in 1,400 m this limit is 10 kbbl/day. In summary, SSDI will generally have fewer fates benefits at the 500 m site than at the 1,400 m site, all else being equal; and, at some threshold water depth, SSDI benefits will become negligible.
The CRA-2 study did not calculate the “effects” benefits which could be an interesting additional effort, as would the use of toxic units in place of concentration thresholds.
Comparative VOC Study
Crowley et al. (2018) studied the effect of SSDI on near-surface atmospheric VOCs emitted near the well during a DWH-like blowout using the RPS ASA integrated oil-fates model for the ocean and a numerical model for the atmosphere (SCIPUFF). The inputs such as the oil type and
___________________
3 A GOR of 1:100 was chosen because it is near the optimal value for the light oils that will characterize larger blowouts (Brandvik et al., 2013, 2014a,b): for instance, an increase in GOR to 1:50 only reduces droplet size about a further 20%.
4 Recall from the earlier discussion that the CRA-2 did not quantify the benefits that might result moving the surfacing oil slick further downstream of the work area. If this benefit were somehow quantified it might prove substantial enough to change the conclusion in this sentence.
site location were identical to the CRA-1 study (French-McCay, 2018a). While Crowley et al. (2018) only looked at the case with no response and the case with SSDI, it can be argued that VOCs near the well with no response will look similar to the VOCs with traditional response. That is because none of the traditional response methods are allowed to get close to the well site for safety reasons, and hence are unable to remove any surfacing oil near the well which is the primary source of VOCs near the well.
Wind speed and direction play a key role in controlling VOC concentrations so a stochastic wind modeling step was first performed to determine three distinct wind events that would cause low, medium, and high VOC concentrations within a 1-week period. Currents are also a stochastic process that can affect the volume and location of the surfacing oil which in turn can affect VOC concentrations near the well. Because currents and winds are not well correlated in deep water, accounting for their joint statistics means many different combinations must be considered. To avoid this complexity, the study assumed a current profile based on an average for the site.
The actual simulation began by running the integrated fates model without SSDI and with 1% (1:100) SSDI. The result was a three-dimensional field (x, y, and t) of volatilized VOC flux in the vicinity of the well with and without SSDI on a 20 km square grid with 1 km resolution centered on the well.
The surface VOC fluxes were then fed into the atmospheric model for the three wind cases yielding six total cases (three wind cases times the two SSDI cases). The atmospheric model used a 20 km square grid with 100 m resolution centered on the well. Results were saved at 0, 1, 10, and 100 m above the sea surface.
The study concludes that SSDI reduces peak VOCs by factors of 100-200 times depending on the wind condition.
A key question is this: Do the concentrations found by Crowley et al. (2018) without SSDI represent a significant threat to worker health and safety? According to Crowley et al. (2018) the answer is not easily obtained. The problem stems from the fact that agencies involved in worker safety typically set standards based on a time average of 8 to 12 hours. In an actual spill response, safety personnel will typically shut down operations if concentrations exceed those 8- to 12-hour thresholds for only minutes. With that in mind, Crowley et al. (2018) interviewed several industrial hygienists involved in spill response who suggested an instantaneous limit of about 25 ppm for total VOCs. Crowley found that without SSDI, VOCs exceeded this threshold many times. One obvious problem with the Crowley work is that there is no model validation.
Model of Gros et al. (2017)
Description of Original Effort
Gros et al. (2017) applied the Texas A&M Oilspill Calculator (TAMOC) model summarized in Table 5.1 to evaluate the effectiveness of SSDI during the DWH spill. To validate the model, they compared results to observed concentrations of many oil constituents (e.g., benzene, toluene, etc.) measured in the intrusion layer (900-1,300 m depth) and in the atmosphere. They found good agreement using a 0.4% (1:250) DOR (best estimate of the dispersant dosage during this day). Once the model was validated, they used it to estimate the distribution of oil through the water column during DWH. They then ran the model using no dispersant. Their important findings were:
- 24% of the hydrocarbon ended up in the intrusion layer, mostly as aqueously dissolved compounds and 0.8% as microdroplets.
- Dispersant was estimated to decrease the median droplet size by a factor of three and increase hydrocarbon dissolution by 25%.
- Dispersant increased the volume of soluble hydrocarbon retained in the lower water column by 55% and reduced the volume of oil that surfaced, reducing the VOCs in the atmosphere by 28%.
The dispersant effectiveness suggested by the model is substantial and notable in that it was achieved with what was almost certainly a suboptimal dosage of 0.4% (1:250) DOR. Work by Brandvik et al. (2013, 2014a) on Macondo-like oil has shown that a DOR of 1:100 to 1:50 is probably optimal for a subsurface oil spill and would result in a droplet reduction of three times more than that observed with a DOR of 1:250.
Description of Additional Runs
To further investigate the sensitivity of the Gros et al. (2017) results to changes in DOR and droplet size model, the committee commissioned Socolofsky and Gros to make four additional runs using different DSDs. The additional model runs are described in more detail in Appendix E. The most important findings were as follows:
- If the DOR during DWH had been increased from 1:250 to a more optimal 1:100 this would have eliminated virtually all the oil from surfacing. The committee interprets this to suggest that VOCs and shoreline oiling would likely be negligible.
- The comparisons with the Gros et al. (2017) DWH dataset suggest that the d50 during DWH was about 1 mm. Both the VDROP-J and the SINTEF model give values near this assuming a DOR of 1:250 (the average DOR during this time period suggested by Gros et al., 2017).
- The RPS ASA’s DSD used for the DWH NRDA (Spaulding et al., 2017) does not reproduce critical characteristics of the Gros et al. (2017) dataset. In general, the NRDA DSD overestimates the oil in the intrusion layer. It also overestimates the lighter factions making it to the surface thus suggesting that one could not simply adjust RPS ASA’s assumed mixing efficiency.
- The smallest droplet size tested (115 µm) overestimates most of the oil components in the intrusion layer by factors of two to three times, while at the surface there is virtually no oil except for a few higher end components, which are still underestimated by factors of more than two times. By analogy, the 70 µm droplet size used by Paris et al. (2012) DSD would have even larger discrepancies. One sees opposite trends of similar magnitude if the d50 = 10 mm.
Spill Impact Mitigation Assessment of Subsea Dispersant Injection
In 2017, a SIMA was prepared for the Scotian Basin exploration drilling project initiated by BP Canada Energy Group focused on an offshore source control event in Nova Scotia (Slaughter et al., 2017). As can be seen in the example SIMA output below (see Figure 6.11; see Chapter 5 for the methodology), the end result is one that can help frame the discussion about the mitigating aspects of each spill response tool in relation to the potential ecosystem impacts.
The framework for identifying resources of concern (ROCs) for this SIMA consisted of understanding ecosystem health, human safety, and socioeconomic concerns in a given area (e.g., platform location, pipeline route, shipping channel, etc.). Key resources were identified using physical, biological, and socioeconomic data for the region, and they were also pulled from existing studies for that region (e.g., Environmental Impact Statements, seismic surveys, and biological assessments).
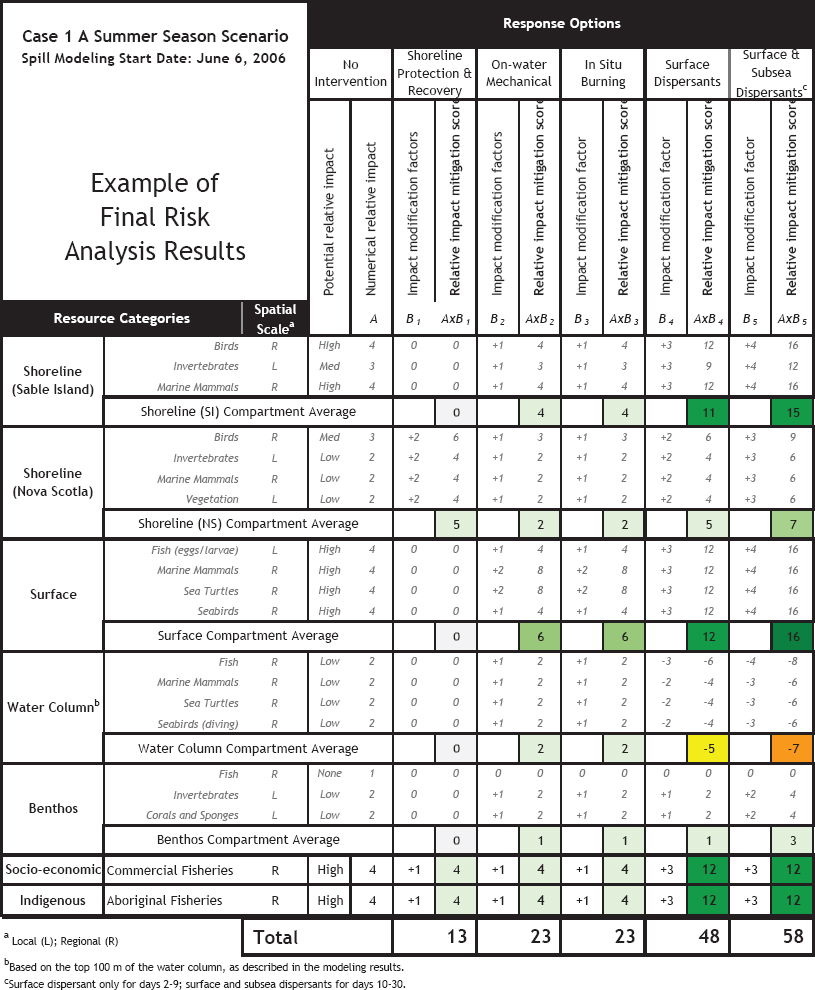
TABLE 6.4 Example Resources of Concern Table Used to Support the SIMA Process
| Area | Habitat | Habitat | Resource Category |
|---|---|---|---|
| Shoreline | Nova Scotia Intertidal | Marine intertidal zone is defined as the area of the foreshore and seabed that is exposed to the air at low tide and submerged at high tide. | Birds Invertebrates Mammals Vegetation |
| Sable Island Intertidal | Marine intertidal zone is defined as the area of the foreshore and seabed that is exposed to the air at low tide and submerged at high tide. | Birds Invertebrates Mammals Vegetation |
|
| Cultural and Subsistence | |||
| Shelf (from subtidal zone to the shelf break) | Sea Surface | The sea surface microlayer (SML) is the top 1 millimeter of the ocean surface. This is the boundary layer where exchanges occur between the atmosphere and the ocean surface. | Birds Marine Mammals Fish eggs/larvae Sea Turtles |
| Water Column (shallow: less than 20m) | The oceanic mixed layer pelagic environment from the surface to the depth of ~20 m. | Birds (Diving) Fish eggs/larvae Fish Marine Mammals Plankton Sea Turtles Vegetation |
|
| Water Column (deeper: greater than 20 m) | The marine pelagic environment from the oceanic mixed layer (~20 m) to the boundary of the benthic zone. | Birds (Diving) Fish Fish eggs/larvae Plankton Marine Mammals Sea Turtles |
|
| Benthos | The benthic zone is the lowest level in the marine environment which includes the sediment surface as well as subsurface layers. | Corals and Sponges Fish eggs/larvae Invertebrates Fish |
|
| Area | Habitat | Habitat | Resource Category |
|---|---|---|---|
| Slope (extending offshore from the shelf break) | Sea Surface | The SML is the top 1 millimeter of the ocean surface. This is the boundary layer where exchanges occur between the atmosphere and the ocean surface. | Birds Marine Mammals Fish eggs/larvae Sea Turtles |
| Water Column (shallow: less than 20 m) | The oceanic mixed layer pelagic environment from the surface to the depth of ~20 m. | Birds (Diving) Fish eggs/larvae Fish Marine Mammals Plankton Sea Turtles |
|
| Water Column (deep: greater than 20 m) | The marine pelagic environment from the oceanic mixed layer (~20 m) to the boundary of the benthic zone. | Birds (diving) Fish Marine Mammals Fish eggs/larvae Invertebrates Plankton Sea Turtles |
|
| Benthos | The benthic zone is the lowest level in the marine environment that includes the sediment surface as well as subsurface layers. | Corals and Sponges Invertebrates Fish |
|
| Socioeconomic | Commercial Fisheries Indigenous Fisheries Marine Transportation Tourism/Recreation Oil and Gas Operations Research Activities Aquaculture |
SOURCE: Modified from Sponson Group, 2017.
In addition, key resources were identified via engagement with various federal, regional, and local regulators, aboriginal organizations, fish producers and fish associations, nongovernmental stakeholders, and the public (during development of the lease block Environmental Impact Statement). These efforts helped build positive relationships and trust, and they provided transparent and timely communication about perceived risks of oil spills in that area. The engagement process also provided a forum for understanding stakeholders’ priorities, which are taken into consideration and incorporated in the SIMA’s ROCs.
In addition to information that pulled from the Environmental Impact Statements and other regional assessments, the fate and behavior of oil in the spill scenario were studied to identify resources that may be distinctively affected due to age, species type, sensitivity to oil, etc. These resources are taken into consideration during the risk assessment phase of the SIMA.
A geographical area, a habitat, and a representative species list for each ROC was summarized in a table to aid in the SIMA. The representative species is a suitable example of a species, resource category, or other valued component for the region. The representatives may include species designated as threatened or endangered or otherwise protected under that government’s environmental policies.
Under the framework described above, the following resources were identified as ROCs: migratory birds, fish, invertebrates, marine mammals, sea turtles, marine plants, corals and sponges, commercial fisheries, recreational fisheries, cultural and subsistence uses, special areas (marine transportation, military uses, drinking water intakes), and protected areas.
An example of a ROC table (see Table 6.4) is provided to emphasize the difference between habitats that are offshore, on the slope, on the shelf, and on the shoreline. The assessment considers the generalized ecological communities or habitat types that exist in the affected area, except in instances where a particular species or community is integral to the evaluation.
In addition to ecological resources, this table includes socioeconomic and safety resources because a high level of importance is attached to them. These resources are depicted crossing both the habitat and the resource category column in the table to symbolize their assignment across all resource categories and habitats. In particular, commercial fisheries is an important resource for most governments, so it should therefore be included as a ROC. In addition, cultural and subsistence (aka “aboriginal use”) for both historic fisheries and commercial fisheries can be included as a ROC. Other socioeconomic factors such as marine traffic, military use of the waters, recreational boating, and scuba diving could also be added to the ROC table. As shown in Figure 6.11, there were both positive and negative impacts potentially associated with surface or subsea dispersant use, with the balance being favorable for their use in comparison to the other response tools. The only negative outcome in the analysis was associated with water column exposure following dispersant use. This was significantly outweighed by the positive outcomes for the other resource categories that were evaluated.
FINDINGS AND RECOMMENDATIONS
Finding: Each response method has a complex suite of advantages and disadvantages, including and not limited to encounter rate, effectiveness, and ecosystem and human health effects, that are considered when selecting response options.
Finding: Experience with historical spills and integrated models consistently indicate that for large spills, dispersants (both subsea dispersant injection [SSDI] and surface) are a response option that can substantially reduce surface oil.
Recommendation: A metric should be developed which illustrates the impact of SSDI on moving the surfacing oil away from the well. In general, the greater the distance from the well, the better, except in cases where the oil surfaces in the vicinity of sensitive species or habitats.
Finding: Two detailed examinations of the use of SSDI in deepwater scenarios found that SSDI more effectively reduced surface oil than other options. However, it must be remembered that these results are site, model, and scenario specific.
Recommendation: A controlled field experiment or spills of opportunity should be used to collect comprehensive field observations for validating the entire integrated model.
Finding: The Spill Impact Mitigation Assessment (SIMA) and Comparative Risk Assessment (CRA) tools represent two new advances toward qualifying and quantifying the trade-offs involved with response options. The use of integrated models in the new SIMA and CRA tools provides a mechanism for assessing “combinations of response options deployed simultaneously,” with particular focus on large-volume events, which is a considerable improvement over the Consensus Ecological Risk Assessment method, which is limited to a single response option at a time.
Recommendation: Ensure that the decision-making tools consistently and adequately address uncertainty in estimates of potential human health issues as well as environmental impacts. Investigate the sensitivity of various integrated models to biodegradation sub-models.
Recommendation: The benefits and impacts calculated by the CRA should be better validated by hindcasting past spills.
Finding: Integrated model case studies demonstrate that droplet size distribution (DSD) is a critical variable for properly estimating the fate and effects of oil and dispersed oil, especially in the event of a subsea release.
Recommendation: In order to improve models, consider the use of real-time measurements of DSDs at the source during a subsea event.
Recommendation: Develop a site-specific nomograph in site contingency plans that shows how DSD affects fates. This could facilitate an informed discussion on the merits and optimization of SSDI use.
Finding: All models to calculate oil droplet size in a subsea release have used at least one calibration coefficient that must be determined by comparing the model to observations. Only one of these models has been calibrated with more than 12 observations and validated with observations that were not used in the model calibration. There are now more than 200 high-quality experimental observations that can be used for model calibration and validation.
Recommendation: Models should be calibrated with many observations covering as wide a range as possible of oil properties, dispersant-to-oil ratio, gas-to-oil ratio, flow rates, etc. Once the model has been calibrated it should be validated using a different set of observations in order to estimate model bias and confidence limits.


































