
6
Designing for the Debris Environment
As shown in Chapter 4, orbital debris poses a potential hazard to spacecraft in Earth orbit. Although a few measures to reduce the creation of new debris already have been taken, and it appears likely that more will follow, these efforts generally aim at averting major increases in—rather than actually reducing—the future debris population. Therefore, the only foreseeable significant reductions in the debris population will be those caused by orbital decay. The result is that even if measures are taken to minimize the creation of new debris, a debris hazard to spacecraft will exist for many years in most orbits. If measures to reduce the creation of new debris are not taken, the debris hazard in many orbits will increase (as discussed in Chapter 8). In any case, spacecraft designers and operators will have to deal with a debris hazard far into the future.
In the past, most spacecraft designers did not consider the debris hazard as a design consideration, due perhaps to a general lack of awareness of the threat, the low level of the perceived hazard, or an unwillingness to undertake the seemingly large research task of quantifying the risk and determining appropriate means to protect their spacecraft. Although large uncertainties still remain, an improved understanding of the debris environment, combined with the growing availability of analytic and experimental tools to quantify the threat to a spacecraft from debris and the development of techniques to protect against debris impacts, now makes it feasible for designers to assess the debris hazard and protect their spacecraft appropriately.
For spacecraft designers and operators, the decision whether and how
to protect their spacecraft against debris impact must involve balancing the risk and cost of damage from debris impact against the expense of implementing measures to protect against debris. The final decision will be different for each spacecraft because the hazard, acceptable risk, and cost of protection will vary depending on the spacecraft's orbit, configuration, and particular mission. One factor that will not vary greatly is that the earlier debris considerations are factored into the design process, the less costly will any necessary modifications be. Early in the design process, designers can modify aspects of the design to meet debris-related requirements at a minimum cost; later, however, the many design choices that have already been made and cannot easily be changed constrain further design changes.
Determining the need for (and extent of) protective measures against debris is a three-step process. First, the hazard from debris must be calculated by determining the size-dependent debris flux that the spacecraft is likely to experience and then determining the probability that the flux will damage the spacecraft. Second, the effectiveness of various protective methods (such as shielding or component rearrangement) that could be used to reduce the hazard must be determined. The final step is to look at the results of these two analyses and consider the tolerable level of hazard for the spacecraft, to determine the costs and benefits of implementing protective measures. As illustrated in Box 6-1, the final decision on protecting a spacecraft will vary greatly depending on the spacecraft involved and the level of hazard acceptable to the designers and operators.
DETERMINING THE HAZARD FROM DEBRIS
To quantify the threat of orbital debris to a spacecraft, designers must analyze the particular debris environment in their spacecraft's orbit, as well as the spacecraft's vulnerability to that environment. A number of analytic and experimental tools that can be very helpful in carrying out these tasks are now available to designers. It is important, though, that spacecraft designers who use these tools recognize the assumptions incorporated in them so that they fully understand the uncertainties associated with their output.
The overall flux of orbital debris that a spacecraft will experience is largely a function of the spacecraft's size, orbital altitude, inclination, and attitude; the duration of the mission; and the current level of solar activity. As discussed in Chapter 2, a number of orbital debris environmental models that designers can use to estimate the debris flux on spacecraft have been created. One detailed engineering model has been developed by scientists at NASA (Kessler et al., 1989) and is being used by NASA,
|
BOX 6-1 Design Responses to the Debris Hazard: Three Examples International Space Station: Because of the extremely high value of the spacecraft and the desire to protect the people that will inhabit it, the International Space Station design requirements are that the probability that debris impact will cause a critical failure must be less than 0.5% per year. Geostationary Communications Spacecraft: Due to the low perceived hazard in the geostationary orbit, no spacecraft in GEO are known to have design requirements specifically for protection against debris impacts, though they are designed to survive the micrometeoroid environment. RADARSAT: The RADARSAT spacecraft is designed to be launched into an orbital regime with a high debris flux. The response of the RADARSAT designers is presented in some detail at the end of this chapter. |
ESA, the National Space Development Agency of Japan, and the Russian Space Agency in the design of the International Space Station (Kessler et al., 1994). A simplified version of this model, accessible on the EnviroNET database (Lauriente and Hoegy, 1990), can predict the cumulative debris flux of a given size on a spacecraft surface in any LEO. The ESA Reference Model for Space Debris and Meteoroids is also available in an analytic form useful for spacecraft designers (Sdunnus and Klinkrad, 1993).
Once the debris flux and the distribution of impact angles have been estimated, the number of impacts on specific spacecraft components can be predicted. This process involves determining the location of each component relative to all the others and to the incoming space debris, to see how components shield one another and to determine where and at what angles debris is likely to strike each component. NASA's BUMPER probability analysis code (Christiansen, 1993), which was developed for the analysis of Space Station Freedom and has since been applied to the U.S. shuttle orbiter, LDEF, Mir, and the proposed International Space Station, can be used to link the debris (and meteoroid) environment with the spacecraft's geometry and penetration equations to determine the perforation hazard to each part of the spacecraft and to size shielding to prevent such perforations. However, BUMPER can only predict perforation hole size; it cannot predict other types of impact damage.
Other models, analyses, or impact tests are needed to assess the probability of component failures due to impact damage effects. As described in Chapter 5, this can be accomplished through numerical or analytical methods, by subjecting some components to actual hypervelocity impacts, or through a combination of both approaches. As described in
Chapter 4, several different impact effects should be considered when making such assessments. These include
-
the effect of perforations on the overall performance of the system;
-
damage resulting from high-velocity fragments, plasmas, and impulsive loads generated by the debris impact;
-
the extent and effect of surface degradation from debris impact;
-
the growth of impact damage features over time; and
-
damage to critical components leading to spacecraft loss.
The performance of shielding and operational protection techniques in preventing these types of damage from debris impact can also be explored.
Finally, the vulnerability of the spacecraft to debris can be determined by combining the probability of failure of its various components due to debris impact. This includes accounting for the redundancy of components and their criticality to the spacecraft. If the vulnerability of the spacecraft is found to be unacceptable, various protective measures can be taken to decrease the threat to the spacecraft as a whole, or at least to protect its more vulnerable components.
DAMAGE PROTECTION TECHNIQUES
Passive, active, or operational protection schemes can be used to protect spacecraft from debris impact damage. Passive protection generally consists of shielding a spacecraft or its critical components. Active protection schemes use sensors to provide advanced warning of impact and then protect critical components or move the spacecraft to avoid the potential impact. Operational protection schemes change the design of a spacecraft to allow for graceful degradation or change a spacecraft's operations to reduce the overall hazard to the mission. Designers who wish to protect their spacecraft from debris impact must trade off the costs and the benefits of each method to determine the appropriate method or methods with which to protect the spacecraft.
Passive Protection
Passive protection typically involves the shielding of a spacecraft against debris impact. As a result of the size distribution of objects in Earth orbit (as illustrated in Figure 4-1), spacecraft are much more likely to be struck by small debris than by medium-sized debris; the chance of being struck by large debris is lower still. For obvious reasons, the mass of shielding needed to protect a spacecraft against larger, more energetic objects increases with the objects' size; this growth in shield mass will
increase a spacecraft's launch costs or decrease its payload mass. The decision to shield a spacecraft and the determination of how much shielding is necessary require that the acceptable level of risk (i.e., the probability of collision with an object large enough to damage the spacecraft) be balanced against the added mass (and thus cost) required to protect the spacecraft against various debris size ranges.
In practice, the basic spacecraft structure, which must be more massive than is needed in space simply to withstand launch loads, often becomes the primary ''shield" against debris. Only if this structure is incapable of providing sufficient protection should additional shielding be considered. If additional shielding of components is required, existing components on spacecraft often can be augmented to serve as debris shields. For example, component walls can be thickened or layers of particle-breaking material can be added to thermal blankets covering the exterior of a spacecraft. Although this type of modification will not provide as much protection as the equivalent mass of specially designed shields, it generally results in smaller increases in spacecraft volume, complexity, and cost.
If specially designed shields are deemed necessary, the driving issue is to minimize mass, size, and cost, while maximizing protection against debris impact damage. Two basic types of shields, monolithic and spaced (Whipple bumper), are used; new variations on both continue to be developed. The basic advantages of monolithic shields are their simplicity and low volume. Whipple bumper shields, however, will generally provide far better protection against high-velocity orbital debris than the same mass of monolithic shielding.
Monolithic shields are typically used to protect against small mass and lower-velocity impacts. In such impacts, the projectile's impact energy is low enough that it typically does not break up, and the shield is effective because its mass is sufficient to absorb and distribute the impact energy. At higher collision velocities, however, impacting objects often break apart on impact; at typical LEO collision velocities, an impacting object will generally melt or vaporize. Fragmented or melted impactors will either cause a large spherical crater or perforate the shield, depending on shield thickness. While monolithic shields can protect against high-velocity impacts, the monolithic shield thickness required to prevent perforation increases with approximately the two-thirds power of the collision velocity (see, for example, Swift, 1982; Cour-Palais, 1985; 1987).
At impact velocities greater than 2 to 3 km/s, a Whipple shield generally becomes more efficient (in terms of stopping debris per unit mass) than a monolithic shield. Experimental and theoretical evidence shows that at typical meteoroid impact velocities in LEO, Whipple bumpers
provide protection equivalent to monolithic shields 10 to 20 times their mass (Swift, 1982). As illustrated in Figure 6-1, when a high-velocity projectile strikes a Whipple shield, the interaction with the bumper sends a shock wave through the projectile, initiating projectile breakup, melting, or vaporization. Smaller, reduced-velocity particles then travel between the bumper and the catcher and impact a larger area on the catcher. This spreads the total impact energy over a large area and ensures that each individual particle has relatively little energy or momentum, allowing the catcher to be much thinner than a monolithic shield.
Whipple bumper shields must protect against not only the high-speed particles that will break apart or vaporize on impact with the bumper but also the slower-moving objects that will simply perforate the bumper and strike the catcher still intact. A spaced shield with a thick monolithic catcher is thus required to protect against the entire range of debris ve-
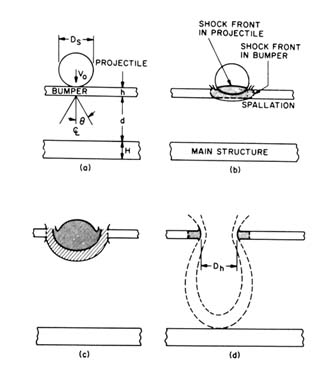
FIGURE 6-1 Projectile interacting with a spaced shield. (a) impact onto a thin bumper plate, (b) penetration, (c) subsequent formation of a spallation cone, and (d) loading transmitted by the cone to the catcher.
SOURCE: Riney, 1970.
locities. In this type of shield, the thickness of the catcher is driven by the largest and fastest impactor expected to reach it without being broken apart by the bumper. The bumper is sized according to the highestenergy impactor expected, and the spacing between the two is designed to optimize distribution of projectile energy.
Several variations of Whipple bumpers are currently being developed and studied. These improvements, including the multilayer NEXTEL shield (Cour-Palais and Crews, 1990) and the mesh bumper shield (Christiansen and Kerr, 1993), reduce the mass of shielding needed to protect against a given environment and/or reduce the secondary ejecta produced by impacts into shields. Various shielding studies for the International Space Station, including a single aluminum Whipple bumper, a double aluminum bumper, and a stuffed Whipple bumper have also been conducted at ESA, NASA, and the National Space Development Agency of Japan (Christiansen, 1994; Ito, 1994; Lambert, 1994).
Active Protection
Active protection systems use sensors to warn of impending debris impact and mechanisms or motors to protect critical components or to move the spacecraft away from the potential impact. The only active protection schemes employed to date in space have involved using ground-based sensors to alert crewed or GEO spacecraft of potential collisions with cataloged objects; the spacecraft can then fire maneuvering rockets to safely avoid the objects. Other methods of active protection have been proposed, however. Some involve detecting oncoming small debris with on-board sensors and then either closing shutters over sensitive components or rotating the spacecraft so that the sensitive components are not struck. Still more technologically audacious active protection schemes involve shooting free-flying shields or directed energy weapons (lasers, plasmas, etc.) at oncoming debris to divert or fragment it before it strikes the spacecraft (Schall, 1993; Settecerri and Beraun, 1993).
All active protection mechanisms require advance detection and warning. Because debris may approach a spacecraft at velocities of greater than 10 km/s in LEO, most require warning when a potential impactor is hundreds of kilometers from the spacecraft to allow the spacecraft time to respond (i.e., safely maneuver, rotate within operating limits, fire at the impactor). The necessary detection and tracking capabilities to provide this warning can theoretically be supplied either by on-board sensors or by ground-based space surveillance systems.
Detecting debris with spacecraft-based remote sensors has been discussed in Chapter 2. Using such sensors even to detect debris is a difficult task; using them for collision warning is extremely demanding. In
|
BOX 6-2 Space-based Sensors and Collision Avoidance Maneuvers Space-based sensors may not be capable of providing sufficiently timely and accurate warnings for most spacecraft to maneuver to avoid oncoming debris. For example, even if a 1,000-kg spacecraft in LEO were equipped with a sensor system capable of warning the spacecraft of an impending collision at 100-km distance with such accuracy that the spacecraft could avoid the debris by moving only 25 meters, the spacecraft would still have only about 5 seconds to move the 25 meters. Such a maneuver would require a rocket engine with a thrust of 2 kN. (In comparison, typical station-keeping rockets have a thrust of 1 N.) If a 375,000-kg space station had to perform the same maneuver, it would need a rocket with 750 kN of thrust (about the same as the second stage of an Ariane 4 launch vehicle). Additionally, acceleration for such a maneuver would probably exceed the permissible G-loading on extended structures (such as solar panels). Increasing the distance at which the debris was detected would reduce both the propulsive thrust required and the resulting G-loading. |
this role, the sensors must not only detect the oncoming object but also acquire enough position information to determine if it will hit the spacecraft, and they must do all of this fast enough to allow the spacecraft sufficient time to react (see Box 6-2). This problem is much simpler if the sensor is located on the spacecraft to be protected. However, the physical requirements of systems able to detect medium-sized debris at sufficient distances (and time) to allow action to be taken could be very demanding. For example, a space-based radar would require extremely high power levels; optics would have to be tens to hundreds of centimeters in diameter. The sensors would also require wide fields of view to detect all incoming debris.
Data from ground-based surveillance systems, on the other hand, have already been used for collision warning. As described in Box 6-3, space surveillance organizations use these data to project objects' future locations and to alert spacecraft if they will pass close by, or possibly collide with, another object. For this reason, ground-based collision warning systems, unlike space-based systems, have no problem providing sufficient warning time; they are, however, limited to warning of debris large enough to track from the Earth (currently the minimum size trackable is about 10 cm in diameter, as discussed in Chapter 2) and are limited in predictive accuracy.
Effective ground-based collision warning requires three main elements. First, the catalog must contain a significant fraction of the hazard
ous debris that could intersect the orbit of the spacecraft. Second, the system must provide sufficiently accurate information so that the ratio of false to real alarms does not require the spacecraft to make an excessive number of avoidance maneuvers. Finally, the spacecraft must be able to respond to the system's warning by moving out of the oncoming object's path (requiring both an effective maneuvering capability and a timely warning) or by employing other active protection measures.
Current collision warning capabilities do not meet these requirements. First, current catalogs are incomplete in size ranges less than 20 cm and thus cannot warn against the majority of potentially hazardous debris objects. In addition, uncertainty in predicting the future location of both objects potentially involved in a collision, due to the unpredictable nature of the upper atmosphere (described in Chapter 1), means that a high ratio of unnecessary to necessary maneuvers is inevitable. This uncertainty also prevents accurate prediction of collisions with sufficient advance warning for most current spacecraft to execute an avoidance maneuver.
Designers of such high-value missions as the International Space Station have explored the development of a collision warning system for debris down to 1 cm in diameter. Such a system would require a network of short-wavelength radars and propagation of the expected orbit of the objects with significantly more accuracy than currently achieved by either the SSS or the SSN. One estimate of the cost of such a network is $1 billion, with yearly operating costs of about $100 million (Loftus and Stansbery, 1993).
In summary, the sensor capabilities required for active protection
|
BOX 6-3 U.S. Space Shuttle Collision Avoidance As a part of its reassessment of operating procedures after the Challenger accident, NASA developed a collision avoidance procedure for the Space Shuttle. Before the launch, the SSN analyzes the location of cataloged debris for the first four to five hours of the mission to determine if any will pass close to the shuttle. When the shuttle is in orbit, the SSN will notify NASA if a cataloged object is predicted to pass within 5 km radially or 25 km along the orbital track of the shuttle. If the predicted distance closes to 2 km radially or 5 km along the track, the shuttle will perform a collision-avoidance maneuver if it does not compromise either primary payload or mission objectives. The shuttle requires 45 minutes warning to plan and perform a collision-avoidance maneuver (General Accounting Office, 1990). From 1989, when this procedure was implemented, through February 1994, the shuttle received four notifications and performed three collision-avoidance maneuvers (Stich, 1994). |
schemes are both technically challenging and expensive and thus would probably be used only for crewed or other highly valued spacecraft. Even with an effective collision warning system in place, however, many active protection methods may still be infeasible. The shoot-back schemes, for example, require far more power (perhaps tens of kilowatts) than most spacecraft can generate, and as discussed, maneuvering away from debris in the short-notice warning case can require high-thrust rockets and sturdy spacecraft design.
Operational Protection
Operational protection, including oversizing, redundancy, and mission/architecture design, is currently the most commonly used impact protection method in the spacecraft design community. Most operational protection schemes in place, however, were not implemented to deal with the debris hazard but rather to minimize the chance of mission failure due to component failure from any cause. To turn this logic around, a secondary advantage of operational techniques is that they not only protect against the debris hazard but also protect the spacecraft against failures unrelated to debris impact.
One operational protection approach is to design for "graceful degradation" so that, although a component may be operating out of its specified ranges, the degraded performance does not cause complete breakdown or mission failure. A typical example is thermal control, which depends on the reflective and absorptive properties of surface materials. Surface degradation can cause the temperature-controlled item to gradually approach and exceed designed temperature limits (usually the hotter limit). The operational protection approach is to design the thermal surface so that it initially provides more than enough thermal control and then to design the components underneath so that they too degrade gracefully when out of limits, thus increasing the safety margin. Oversizing can also be used for solar panels and other components to allow a given amount of degradation while retaining the required performance levels.
Another operational protection technique is redundancy, which is used primarily for electronic and propulsion components. This approach involves duplication of components in two or more places on the spacecraft so that if one component fails, another can take its place. Redundancy can even be applied to entire spacecraft constellations; the U.S. Global Positioning System utilizes this approach by maintaining more spacecraft in orbit than needed at any one time.
A third operational technique is to trade off system performance criteria with the orbital altitude and attitude in which the spacecraft will
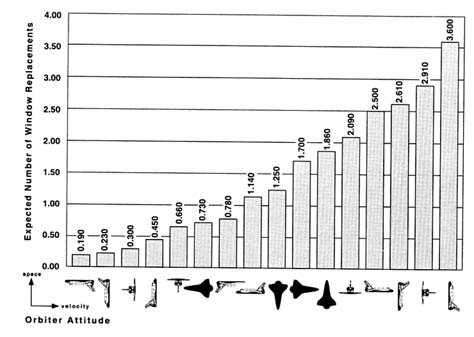
FIGURE 6-2 Expected number of window replacements for U.S. Space Shuttle at various orbital attitudes. SOURCE: NASA Johnson Space Center.
operate. One example of this is redesigning a mission so that a sensitive component functions facing the rear, rather than in the direction of motion, to reduce the flux on that component. Although mission requirements for the pointing of sensitive components make this approach infeasible for many missions, it can occasionally be employed. Figure 6-2 illustrates how orbital attitude changes the number of expected impacts on U.S. Space Shuttle windows. Space Shuttle Rule 2-77 states that the shuttle should use the orientation that causes the least number of window impacts unless it compromises mission objectives (NASA, 1993a). The space shuttle also uses orbits believed to have a lower flux of debris whenever possible; mission designs must keep shuttle orbital altitudes below 320 km whenever possible without compromising high-priority objectives (NASA, 1993b).
FINDINGS
Finding 1: Improved abilities to assess the hazard to spacecraft from orbital debris and, if necessary and feasible, to incorporate some protective measures to avoid spacecraft and component degradation or loss,
|
BOX 6-4 Designing for the Debris Environment: The RADARSAT Example The Canadian RADARSAT is a 3,000-kg, three-axis stabilized spacecraft with about 5 square meters of frontal surface. It will be placed in a sun-synchronous orbit with an altitude of 790 km and an inclination of 98.5 degrees for a designed functional lifetime of five years. Because the orbital regime into which the spacecraft will be launched is believed to have a high debris flux and the initial RADARSAT design exposed many components to the space environment, the designers performed an assessment of the debris hazard to the spacecraft. First, using NASA's EnviroNET, the designers predicted the approximate flux of space debris on the spacecraft, given the RADARSAT orbit parameters and configuration. This provided an estimate of the number of impacts expected on the leading face of the spacecraft with respect to debris size. The expected velocity leading face of the spacecraft with respect to debris size. The expected velocity and impact angle distributions for impacting particles were then determined using a NASA model of the LEO environment (Kessler et al., 1989). These indicated that one 1-mm particle and a larger number of smaller objects would impact the spacecraft's leading surface during its five-year mission. (Of course, as described in Chapter 3, any estimates of small debris populations in this orbital regime are based on significant extrapolations from existing data.) It was calculated that most impacts would occur with velocities in the 13- to 15.5-km/s range, with impact angles in the range of 5 to 30 degrees (measured from the direction of motion). Using this information, spacecraft components were examined analytically to determine their vulnerability to impacts. The payload module contained electronic components behind honeycomb shear panels, so analysis of the module focused on determining whether the shear panels sufficiently shielded the electronics. Hypervelocity impact equations indicated that the components were adequately shielded. On the bus module, however, most of the sensitive equipment was mounted on the outside of the honeycomb shear panels and was therefore protected only by multilayer insulation (MLI) thermal blankets, separated from the shear panels by 15 to 25 cm. An analysis was performed to determine the vulnerability of each component (including not only electronic equipment, but also cable harnesses between boxes and propulsion subsystem hardware) and then to combine these numbers to determine an overall bus module vulnerability. The overall survivability against the meteoroid and orbital debris environment was calculated to be only 50% over the five-year functional lifetime. To complement the computational analyses, some spacecraft components were subjected to impacts at the NASA's Hypervelocity Impact Research Laboratory. The tests were used to verify the assumptions made in the analyses and to determine the effectiveness of various shielding techniques. The test articles included different configurations of honeycomb shear panels, various thicknesses of electronic component walls, hydrazine lines, synthetic aperture radar waveguides, and wire bundles. MLI blankets were also tested, with and without reinforcement, to verify their shielding effectiveness. The impact angles were varied to simulate impacts on components on both the front and the sides of the spacecraft. Some results from the tests follow: |
|
||||||||||
are now available to spacecraft designers. Tools are becoming available to make these tasks easier, but it is important that spacecraft designers understand the assumptions that have been incorporated into them.
Finding 2: A spacecraft's basic structure should be the first line of defense against the debris hazard. If the spacecraft's structure does not provide sufficient protection, it may be necessary either to add additional shielding or to employ an active or operational protection scheme. Shielding can involve augmenting existing components or adding new shields. Selective local shielding of critical components can be a cost-effective means to reduce spacecraft vulnerability to debris or micrometeoroid impacts.
Finding 3: Active protection measures, such as movable shields and shutters, avoidance maneuvering, and direct attacks on incoming impactors,
are costly and often technically challenging. They require advance detection and warning, which in turn may require improved sensor capabilities. Development of a collision warning system capable of protecting spacecraft effectively against all hazardous orbital debris would be expensive and challenging.
REFERENCES
Christiansen, E. L. 1993. Spacecraft Meteoroid/Debris Protection. Briefing presented to the National Research Council Committee on Space Debris Workshop, Irvine, California, November 18.
Christiansen, E.L. 1994. Shielding Status. Paper presented at the eleventh meeting of the Inter-Agency Space Debris Coordination Committee, Tsukuba, Japan, May 12–14.
Christiansen, E.L., and J.H. Kerr. 1993. Mesh double-bumper shield: A low-weight alternative for spacecraft meteoroid and orbital debris protection. International Journal of Impact Engineering 14(14):169–180.
Cour-Palais, B.G. 1985. Hypervelocity impact investigations and meteoroid shielding experience related to Apollo and Skylab. NASA CP-2360. Pp. 247–275 in Orbital Debris. Washington D.C.: National Aeronautics and Space Administration.
Cour-Palais, B.G. 1987. Hypervelocity impact in metals, glass and composites. International Journal of Impact Engineering 5:221–237.
Cour-Palais, B.G., and J.L. Crews. 1990. A multi-shock concept for spacecraft shielding. International Journal of Impact Engineering 10:499–508.
General Accounting Office (GAO). 1990. Space Program: Space Debris a Potential Threat to Space Station and Shuttle. Report to Congress, GAO/IMTEC-90-18. April. Washington, D.C.: GAO.
Ito, T. 1994. Hypervelocity Impact Test Results Recently Conducted by NASDA. Paper presented at the eleventh meeting of the Inter-Agency Space Debris Coordination Committee, Tsukuba, Japan, May 12–14.
Kessler, D.J., R.C. Reynolds, and P.D. Anz-Meador. 1989. Orbital Debris Environment for Spacecraft Designed to Operate in Low Earth Orbit. NASA Technical Memorandum 100471. April. Houston, Texas: National Aeronautics and Space Administration Johnson Space Center.
Kessler, D.J., R.C. Reynolds, and P.D. Anz-Meador. 1994. Space Station Program Natural Environment Definition for Design. NASA SSP 30425, Revision B. Houston, Texas: National Aeronautics and Space Administration Space Station Program Office.
Lambert, M. 1994. Space debris shield optimization. Paper presented at the eleventh meeting of the Inter-Agency Space Debris Coordination Committee, Tsukuba, Japan, May 12–14.
Lauriente, M., and W. Hoegy. 1990. EnviroNET: A Space Environment Data Resource. AIAA 90-1370. April. Greenbelt, Maryland: National Aeronautics and Space Administration Goddard Space Flight Center.
Loftus, J.P. Jr., and E.G. Stansbery. 1993. Protection of space assets by collision avoidance. Presented at the 44th Congress of the International Astronautical Federation, Graz, Austria, October 16–22. International Astronautical Federation.
NASA (National Aeronautics and Space Administration). 1993a. NASA Johnson Space Center Flight Rules. Flight Rule 2-77, Pp. 2-80a—2-80b. Houston, Texas: NASA Johnson Space Center.
NASA (National Aeronautics and Space Administration). 1993b. Space Shuttle Operational Flight Design Standard Ground Rules and Constraints. NSTS-21075, Rev. A, Level B,
Change 6, April 30, 4.2.4.2. Washington, D.C.: National Aeronautics and Space Administration.
Riney, T.D. 1970. Numerical evaluation of hypervelocity impact phenomena. Pp. 157–212 in High Velocity Impact Phenomena, R. Kinslow, ed. 1970. New York-London:Academic Press.
Schall, W.O. 1993. Active shielding and reduction of the number of small debris with high-power lasers. Pp. 465–470 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, April 5–7 1993. Darmstadt: European Space Operations Center.
Sdunnus, H., and H. Klinkrad. 1993. An introduction to the ESA Reference Model for Space Debris and Meteoroids. Pp. 343–348 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Settecerri, T.J., and J. Beraun. 1993. Laser debris sweeper for the Space Station Freedom. Pp. 471–477 in Proceedings of the First European Conference on Space Debris, Darmstadt, Germany, 5–7 April 1993. Darmstadt: European Space Operations Center.
Stich, J.S. 1994. Conjunction Summary for STS-26 through STS-61. NASA JSC Memo DM42/93-010. February 7. Houston Texas: National Aeronautics and Space Administration Johnson Space Center.
Swift, H.F. 1982. Hypervelocity impact mechanics. P. 215 in Impact Dynamics. New York: John Wiley & Sons.















