
4
Matching the Training Environment to Objectives
The instructional design process, when applied to simulator-based training, requires an assessment of the appropriate level of simulation necessary to ensure that training objectives are supported. Included in that assessment should be an analysis of:
- the capabilities of the training platform to produce a sufficiently realistic training environment to meet training objectives, and
- the capabilities of the instructional team to use the resource effectively and efficiently.
How much realism is actually necessary to enable effective learning using simulation has not been scientifically established (Hays and Singer, 1989). Realism, in this context, is defined as having two components—functional fidelity (how it works) and physical fidelity (how it looks).
No recent research was identified by the committee that would quantify how much fidelity is needed for an effective simulator-based training program. There is, however, some agreement that the highest level of fidelity is not necessarily required in all elements of the simulation to achieve quality instruction and training objectives. Early research in this area (Hammell et al., 1980,1981a, 1981b; Williams et al., 1980, 1982) found that factors other than fidelity were as important, and, in some cases, more important than highest-fidelity simulators in achieving training objectives.
The lack of recent research in the area of simulator fidelity has strongly influenced the perceived need for using the highest levels of fidelity as a defense against training-induced errors in mariner performance. In fact, the highest fidelity
is sometimes used even though deliberate departures from fidelity can, in some cases, enhance training effectiveness (Hettinger et al., 1985; Hays and Singer, 1989). The underlying issues are the adequacy of the understanding of human performance and application of education and training principles.
ESTABLISHING LEVELS OF SIMULATION
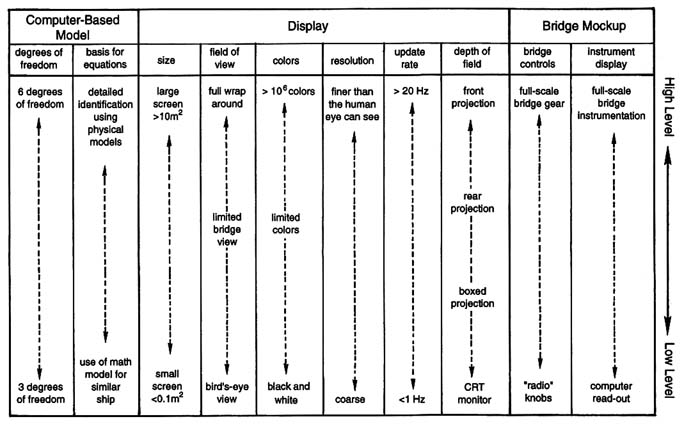
There is great variability in the physical capabilities of ship-bridge simulators. For example, computer-based, full-mission and multi-task ship-bridge simulators vary by: (1) the technical state of practice when simulators are installed or upgraded; and (2) scale, from small through large ship-bridge configurations. Given this variability, it is useful to think in terms of levels of simulation for a given simulator's various physical components (Figure 4-1). Levels of simulation can serve as a technical frame of reference for a subjective assessment of the component's relevance and performance capabilities relative to the training program's instructional objectives.
A simulator may have particularly strong capabilities in some areas and be weak in others. To select the appropriate training platform, it is important to determine which strengths and weaknesses are relevant to training objectives. In some cases, the simulator strengths and weaknesses may not be apparent from a visible inspection or demonstration.
RELATIVE IMPORTANCE OF SIMULATOR COMPONENTS
Each simulator element is important, but their relative importance depends on training objectives. Some equipment is more important to certain functions, duties, or operations than others. Relative importance also depends on the fidelity of details needed to ensure that erroneous or misleading information is not conveyed. Deliberate departures from fidelity need to be clearly understood by all involved. These considerations need to be addressed to avoid the creation of erroneous insights that could potentially affect real-world performance.
The relative importance also depends on the degree of accuracy (including completeness of the visual scene and functionality of the ship-bridge and bridge equipment) needed for credibility with trainees. Pilots, for example, typically expect a higher degree of fidelity and realism than do maritime academy cadets.
Perception of realism is another important consideration (Hays and Singer, 1989). The sequence and manner in which simulation components are introduced to trainees can profoundly affect their perception of the training environment as a real life operating environment. For example, the first ship-bridge simulator component that trainees experience is the bridge or wheelhouse mockup. To ensure an adequate perception of realism, the mockup needs to be believable so that the trainee and, for that matter, the instructor think ''real" ship.
SIMULATOR COMPONENTS AND TRAINING OBJECTIVES
Creating the Illusion
The simulation illusion begins with how the simulator is treated by the instructional staff. Some instructors always treat the simulator as if it were a real ship's bridge. This approach encourages trainees to accept and treat it as such, or, in the case of a limited-task simulator, as real equipment. Treating the simulation as if it were a real experience is helpful in creating an effective operationally oriented learning atmosphere for mariners.
Bridge and Wheelhouse Mockups
The first physical element of a ship-bridge simulator is usually its entrance. In some facilities, trainees walk from a room onto the bridge of a ship. This approach is not particularly realistic. A number of facilities, however, have been configured to convey a sense that trainees are inside the ship's superstructure, for example, in a passageway leading to the bridge or in a chartroom behind the bridge. Large full-mission ship-bridge simulators, and those with motion platforms, require trainees to climb a ladder to reach the bridge, just as they might aboard a real ship. When trainees walk onto the bridge, they are immediately presented with its structure and configuration. If it does not look like a real ship-bridge, trainees are less likely to perceive it as such.
There are other, very practical reasons for a real life layout. The similarity of the structure and configuration of the bridge or wheelhouse to that of a real ship is fundamental to creating cues that will evoke real life responses by the trainees. Although not essential, the addition of functional bridge wings could provide, valuable cues for conning, shiphandling, applying rules of the road, and particularly for watchkeeping training.
A ship-bridge simulator is different from a visual flight simulator in that it usually has to simulate a library of ship types—from coastwise tugs to very large crude carriers. The bridge configuration generally seems to be more important in creating the perception of reality than its physical size, although there are considerable differences in ship-bridge sizes (and simulators).
The size relationship between a trainee's real ship and the simulator is an appropriate consideration when selecting a facility. There must be sufficient floor space for the comfortable operation of a bridge team. Even old and limited capability (visually and hydrodynamically) ship-bridge simulators can be very realistic with respect to onboard surroundings and can be effectively employed to achieve training objectives.
Small details can also be important to creating favorable mariner perceptions. Although they may have little or no functional utility in a simulation items such as life jackets, hard hats on hooks, flag lockers, notice boards, and

FIGURE 4-2
Control and monitoring station.
station bills may be important to physical fidelity. The committee found that it is also advantageous if the debriefing area is contained within the "superstructure" of the simulated ship, thereby maintaining the nautical illusion of reality until the debriefing is concluded.
A number of mariner instructors assert that students should not be permitted to visit the control station1 (Figure 4-2) initially, because premature access may adversely affect their perception of simulator reality. Once trainees' confidence in the fidelity of the simulation has been established, however, showing them the station does not seem to adversely affect their acceptance of the training control environment. Mariner instructors generally believe they need to have the same feel for the exercise as trainees on the bridge; therefore, their control station should be situated and equipped to maintain oversight of the training when they are not role playing or observing on the bridge.
Ship-Bridge Equipment
The relative importance of the ship-bridge equipment for navigation and piloting varies by the functions, tasks, and training objectives. The equipment must be realistic, again to evoke real life behavior and enhance the transfer of training to real operations. There are no empirical studies to determine the actual
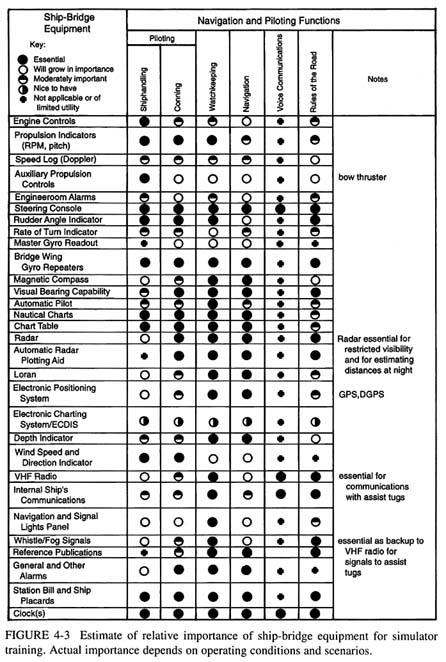
importance of equipment to various functions and tasks, but an estimate of relative importance is shown in Figure 4–3. The estimate was compiled by the committee and reflects a composite view based on the committee's operational experience and insights developed by mariner instructors through the oversight of simulator-based training. Some newer equipment—for example, electronic charting systems, either alone or integrated with real-time precision navigation systems—may not be available on most ships.
It is particularly significant that more equipment is essential for watchkeeping than for any other function. Having additional equipment increases the level of complexity and difficulty for officers of the watch. A well-planned and executed ship-bridge simulator watchkeeping course can be used effectively to prepare candidates to operate and use ship-bridge equipment in a multi-task operating environment.
In most cases, actual equipment is used in the simulation so that all bridge equipment can be physically simulated at high fidelity. Visual and audio presentation of bridge equipment can easily achieve high fidelity. The fidelity of electronic displays is typically high, except for maneuvering behavior and trajectory accuracy, which depend on the mathematical model driving the simulation (see Chapter 7 and Appendix D). Typically, the constraints on achieving high fidelity in the bridge mockup are cost and space rather than technological capability.
Visual Scenes
Trainees experience the visual scene more or less concurrently with their entry to the bridge mockup. To create the perception of reality, it is desirable to have a visual scene projected with the vessel either at anchor, at berth, or underway. Once trainees have adjusted to the bridge configuration, they generally begin to review the visual scene. The first component of the scene that will draw attention is the quality of the projection rather than the visual cues. If the quality is poor, then the simulation may be discredited to some extent.
Next, if the simulated location is known to the trainees, they tend to look for familiar visual references. If these are not present, or are not effectively presented, the simulation is again somewhat discredited. The full impact of visual cues on realism occurs later, during actual simulations, when these cues are used to stimulate trainee performance. Because no simulation can replicate all cues used in real life, many simulator-based training exercises begin with a generic port or approach.
Three Types of Scenarios
In general, scenarios are developed based on one of three types of data—hypothetical, real-world, and hybrid.
Hypothetical (generic) Scenario. A hypothetical scenario is not based on real-world data for specific ports, fairways, environmental conditions, and other nautical information. Vessel characteristics are often modified from the prototype to reduce complexity or to demonstrate a particular set of characteristics. For example:
- a vessel's bow or stern thrusters may be turned off or reduced in effectiveness;
- the actual draft may be modified to enter a shallow-water port; or
- normal port communications practices, such as vessel traffic services, may be turned off, used or not used, as appropriate to the instructional objectives.
Generic situations may be used for simulator familiarity and facilitation, for new vessel familiarization or to demonstrate some particular operating, shiphandling,or resource management problem.
Hypothetical operating scenarios are attractive because the trainee will not be familiar with them. Prior familiarity with a route could mask individual performance weaknesses. The lack of familiarity offered by hypothetical scenarios can be important in ascertaining an individual's ability to react in specific situations—for example, to conduct comprehensive passage planning and to react to situations and conditions encountered along a particular route.
The development of hypothetical data can be tedious, especially if all information normally available from reference publications needs to be replicated to satisfy instructional objectives. Because data are usually made available as an excerpt from the appropriate reference, the ability of a simulation participant to identify and correctly use references will probably not be exercised.
The use of hypothetical data is attractive for marine licensing because standard scenarios and mathematical models could be developed (or specific existing models certified) and distributed for use nationwide. This standardization would provide a consistent technical baseline for performance assessments. For testing purposes, however, it would be appropriate to vary operating scenarios and areas to minimize the opportunity for specialized license-preparation courses, which could reduce the effectiveness of simulation-based performance assessments. Developing a suite of hypothetical operating areas with the necessary supporting reference materials would be resource-intensive.
Real-World Scenario. Operational scenarios based on real-world data can be used to simulate a specific port, fairway, or prevailing operating conditions. The vessels employed need to be as close to the prototype as mathematical modeling and resources allow to avoid conveying false or misleading information about vessel performance in specific settings. Such real-world situations can be used to train masters and vessel teams for new vessels or for passage into a previously unvisited port. Real-world data are particularly useful when familiarizing individuals, such as cadets, who do not have strong, prior nautical experience.
Real-world data offer the advantage of providing the actual reference publications that are used aboard ship, thereby exercising the participants' ability to
identify and use them. The potential problem of individual familiarity with a port, a factor that can influence performance and mask weaknesses, can be overcome by choosing a port area where the participants are not likely to have prior service.
For the real-world scenario, the fidelity and accuracy of the simulation are especially important. Except for at-sea operations, the simulation would need to be validated for each port and waterway area used to ensure that the charted reference points and information from the coast pilot or sailing directions are included. The simulation should also be validated for information such as local geographic references used for navigation, tides, currents, and arrangements for picking up pilots. This information is needed for simulation credibility and to ensure that the simulation is sufficiently accurate in the event that participants subsequently visit that port.
Hybrid Scenario. A hybrid operational scenario combines real-world and hypothetical data. The real-world information is the principal basis for the simulation, with hypothetical features added to achieve specific instructional or performance evaluation objectives. This approach enables the use of actual reference publications with little modification to accommodate additional hypothetical features. The simulated vessel might be true to the prototype or modified for training or assessment. Such situations add realism to the scenario, but permit larger variations in instructional design. Specific, actual features of the real-world situation may be included or excluded; the fairway can be made wider or narrower or shallower or deeper; and port operating procedures can be modified to system capability or to instructional objectives.
The use of a hybrid scenario is attractive for evaluation purposes because hypothetical features can be added to a facility's existing suite of operating areas and validated as appropriate to instruction or licensing objectives. The hypothetical features could be periodically changed to reduce the opportunity to compromise performance assessments through license-preparation courses. Conceptually, the marine licensing authority would only need to revalidate the changed features rather than the whole simulation. The Computer Aided Operations Research Facility used this approach when it created Port XYZ in the 1970s. It was a hybrid of New York harbor.
Computer-Generated Images and Depth Perception
Visual scenes are presented as computer-generated images (CGI) (Hammer, 1993) in four principal ways:
- front projection,
- rear projection,
- boxed projectors, and
- cathode ray tube (CRT) monitors.
|
BOX 4-1 Computer-Generated Image (CGI) Projection Systems Front projection systems generally consist of projectors mounted on top of or above the ship- bridge. CGIs are projected onto external screens up to 40-50 feet away that surround the ship- bridge. These systems require a theater environment. In some systems, the greater distances are correlated with the optics of the human eye to facilitate the perception of depth. Rear projection systems project CGI onto screens using projectors mounted behind the screens. These systems require a theater environment. The screens are generally closer to the ship-bridge than in-front projections. Boxed projector systems generally consist of projectors and flat screens mounted in boxes close to the window frames in the ship-bridge structure. These systems provide limited depth perception, and images can suffer because of the size. Cathode ray tube (CRT) monitor systems place CRT monitors in the window frames of the structure of the bridge mockup; the monitors are "masked" by the frames. These systems have limited depth perception and image size. SOURCE: Hammer (1993). |
Box 4-1 summarizes the differences among these systems.
In addition to CGI projections, nocturnal scenes can be generated using spotlight generators, an older but still highly effective technology for this purpose. Spotlight generators are used either separately or in conjunction with CGI simulations. Generally, nocturnal simulations have achieved higher visual fidelity than daytime simulations. Each approach has technological and training advantages and disadvantages. Which approach a particular facility uses is more a function of cost and space than technological capability, although technology limitations were a principal consideration in simulators installed before the 1990s.
The manner in which visual scenes are displayed affects depth perception, which in turn can influence how individuals perform in the training environment. One method used to improve the depth perception of the projected image has been to curve the projection screen.
Depth of field can best be conveyed by spotlight generators because lights can be displayed at the proper intensity, size, and location. CGI presentations are affected by lower limits of pixel size. Although front projection CGI systems with distant screens provide more realistic depth perception than other CGI systems, the width of the pixel projection increases with distance. The intensity of lights is also somewhat less realistic with CGI, because the lights need to be
bigger than they would appear in real life to present the correct intensity. Cojoined projected CGI and spotlight-generator systems allow better visual accuracy and depth perception (i.e., near lights are larger and brighter than far lights).
When depth perception is poor, some simulation participants appear to rely more heavily on electronic navigation aids than they would in real operations, especially during daylight conditions with unrestricted visibility. When port and waterway features are not readily discernable, trainees will often act as if they were operating at twilight or night. This heavier reliance on electronic navigation aids to determine distances is neither good nor bad; the concern is that it is different from actual practice.
The committee did not identify any research on deviations in individual performance or on the transfer of training caused by variations in image projections. The fact that someone might behave differently in a simulation than in real life because of display-induced depth perception problems is, however, an important consideration with respect to achieving training objectives, evaluating performance, and determining competency.
Visual Scene Quality
Visual scene quality in older simulators varies from high for the ship structure projected to low or medium for the traffic ships, navigation aids, and the background (shoreline, shore structures, and water bodies). With the exception of lights (discussed above), the projection quality for traffic ships, navigation aids, and background visual scene is greatly advanced in the latest generation of simulators.
In the past several years, substantial advances in computational power of computer hardware and digital photographic and mapping capabilities have enabled highly sophisticated and detailed CGIs. These advances were quickly followed by considerable attention to the graphic quality of the visual scene by simulator manufacturers. Various shading and texturing techniques are available for improving the general realism of the scene, as well as depth perception and special effects, such as rain, snow, and fog. The level of fidelity depends on the techniques used. For example, although it is possible to correlate shadows on projected vessel decks with the position of the sun, this feature adds significant computational and correlation requirements. Thus, the general practice has been to apply a fixed shadow adjusted only for lighting conditions.
Advances in computational power have also made it possible to greatly improve the representation of moving traffic ships and sea conditions. In the latest generation, six degrees of freedom of vessel motion can be projected in the visual scene and correlated with physical motion platforms. The relative training benefits and cost effectiveness of adding spotlight-generated lights versus improvements in CGI texturing, shading, and special effects have not been established through research.
Regardless of the sophistication of the visual scene possible in any simulator, the visual scene has only to be ''believable." Even relatively primitive scenes have been demonstrated to be believable in training applications. The individual visual quality requirements for each course must be determined, based on the training objectives and participants.
Visual Cues
Visual cues—the content of the visual scene—are among the most critical, technical components of an effective simulation. Each simulator must be considered with respect to its computational and projection capabilities. In general, ship-bridge simulators are technically able to provide sufficient visual cues to to achieve most instructional objectives. The important consideration is the inclusion of the right content, especially if actual operating areas are being simulated.
Visual cues include the following (some of these general categories may overlap):
- the vessel's hull, superstructure, deck, and cargo—handling features insofar as they can be seen from the vessel's bridge or wheelhouse;
- background details, including geographical reference points, topographical features, shore structures, shore aids to navigation, and water bodies;
- moving models, including traffic ships, buoys, water surface conditions, and special features that convey such motion as bow waves and stern wakes coordinated with ship size and speed; and
- animations, including lighted aids to navigation, running lights, special lights, flags blowing in the breeze, and physical environmental conditions, such as waves, clouds, and local weather conditions.
High fidelity is easily achieved in basic CGI representations of own ship in the visual scene because the position of the vessel's structure is always fixed with respect to the ship's bridge. Therefore, considerable detail that does not change during the course of the simulation can be projected. This detail facilitates depth perception to some extent. Fixed shading and shadows can be added, but there are tradeoffs between realism and depth perception. The own – ship projection is substantially more complicated if shading and texturing are applied and correlated with lighting conditions and movement in the visual scene. The value added by using such cues to achieve instructional objectives has not been established.
The appropriate background details need to be included regardless of whether a generic or actual port area is being simulated. When actual ports are simulated, inclusion of the right cues is critical for functional and psychological reasons because trainees might subsequently find themselves operating in these areas. Attention to accuracy and completeness, insofar as visual features are relevant, is
an important consideration in order to avoid the presentation of insufficient, misleading, or incorrect information. This need exists even if the instructional objectives are not specifically intended to support operations in that operating area.
Sufficient background detail is needed to ensure a close correlation between the training environment and the operating environment being simulated. Moderate completeness, including features and navigational aids presented of nautical charts, is generally sufficient to establish the general context.
Identifying the needed cues to create a simulation of a real operating area can be a problem, particularly if the operating area involves harbor approaches and pilotage waters and is not well-known to the individuals who are developing the simulation (or if their experience is not sufficiently recent). Details must be consistent with current editions of the Sailing Directions and, for U.S. waters, the Coast Pilot. Additional local knowledge not included in these two publications must be researched and included where relevant to the safety of vessel operations. Development of this level of detail may necessitate visits to the port operating areas planned for simulation, photodocumentation, consultations with local marine pilots and other local maritime interests, and validation of the resulting simulation by local area experts. Such activities can be expensive. Failure to undertake this applied research and development, however, could compromise the integrity of the simulation.
Field of View
There are two fields of view—vertical and horizontal. The vertical field of view is important in providing adequate background detail for the operating area being simulated. Vertical field of view is technically constrained by the nature of the bridge mockup and the projection system employed. In general, the view out the window of the ship's bridge needs to be completely filled with the visual scene when the trainee is standing at a traditional position for conning the vessel. For mockups in which it is possible to move to a bridge wing, the vertical height needs to be adequate to ensure that the top of the visual scene does not become a distraction to visual observations and bridge operations. Generally, the vertical field of view is adequate in existing ship-bridge simulators.
The horizontal field of view is very important to shiphandling, navigation, piloting, and the interpretation and application of the rules of the road. The ability to provide and adequate horizontal field of view using a ship-bridge simulator is limited by cost, not technological capability. Even with radar and other electronic navigation systems, shiphandlers rely heavily on visual observations. It is necessary to give very careful attention to functional needs and practices with respect to the horizontal field of view. Its scope has the potential for creating controversy. Many simulators are not capable of providing visual scenes
either abaft of the bean or astern. Nevertheless, these simulators are used for a number of training courses. This problem should be considered in the context of training objectives and level of simulation or component requirements.
A field of view from the centerline to abaft of the beam on both sides of the vessel and a view astern are essential for full situational awareness and for interpreting and applying rules of the road to these situations. A view abaft of the beam is also helpful for shiphandling and piloting because mariners estimate their relative speed of advance over the ground in piloting waters by looking to the side, not by looking ahead. Changes abeam are a more reliable indicator of actual speed because the visual scene does not change as rapidly ahead as on the beam.
When fixing the ship's position visually, it is good navigation practice to take visual bearings on reference points and to plot these bearings as lines of position. Lines of position need to be separated horizontally by a sufficient angle to avoid large errors in the indicated position. To obtain an accurate fix, it is necessary to take bearings on objects ahead and off and abaft of the beam.
Although 90 degrees on each bow (180 degrees total) is the minimum required to take beam bearings, in practice this is an insufficient field of view because rapid change in bearings on the beam would quickly obscure the object being used as a reference point. One hundred twenty degrees on each bow may be more desirable to provide abaft of beam coverage. A 240– degree field of view may be needed for watchkeeping training because of situational requirements for applying rules of the road and because good watch relief procedures require the relieving watch officer to completely assess the operational situation. In particular, the officer who is relieving the watch needs to be able to see abaft of the beam to determine overtaking traffic (Hammell, 1981a).
It is important for the watch officer to use both visual and electronic cues to confirm the available information because the accuracy of navigation fixes from varying sources varies among operating areas. There may also be undetected errors in the gyrocompass repeater used for taking visual bearings or in the electronic navigation equipment. Therefore, information from electronic and visual sources complement rather than replace each other. Both need to be appropriately included in the simulation to create a complete training environment.
The committee found that the horizontal field of view should be continuous so that vessels approaching on a constant bearing are not obscured by the pilothouse window partitions. A continuous field of view is common for front and near projection systems but not always available with projection boxes or CRT monitors.
Various techniques have been used to compensate for horizontal field– of– view limitations. For example, one of the ship– bridge simulators visited by the committee generates the visual scenes through 360 degrees, but is limited to 240 degrees of actual scene projection at any time. The simulator has been configured so that the visual scene projection shifts 90 degrees to the right of left when a bridge wing door is opened, the shift being correlated with the door that is opened. Another facility visited by the committee has two ship– bridge simulators. One is a
full 360-degree visual scene and the other is a 240– degree simulator that has the ability to rotate the bridge to allow simulation of bridge wings.
If there are no nearby geographic references or aids to navigation, shiphandlers estimate their slow– speed movement through the water by looking over the side. For example, it is possible to determine whether a vessel is still underway and approximately how fast it is going by looking over the side to see the foam on the water's surface going by. Similarly, pilots gauge when to discontinue astern bells during anchoring evolutions by the position and movement of turbulence at stern of the ship. Currently, the only simulators providing these effects are manned models. Simulating these effects with CGI would require additional projection systems.
Update Rate
The update rate refers to how quickly the CGLs are refreshed. Because jumpiness in the visual scene detracts from realism, the update rate needs to be fast enough so that objects pass by relatively smoothly. Objects passing close by the vessel have particularly heavy update requirements because their positions relative to the vessel change very rapidly in comparison to distant objects.
Until recently, update rates were usually constant across the entire visual scene. Update rates of 20 Hz or greater were considered high fidelity and required large computers (NRC, 1992). The latest– generation computer hardware has greatly raised computational power. The most recent hardware developments are capable of supporting variable update rates of 60 Hz, and greater on demand, and highly detailed visual scenes. Thus, it is possible to support detailed objects, such as ships, at very fast update rates when are needed, thereby, maintaining a relatively even, high level of fidelity. These high levels of fidelity are available in only a few late– generation simulators.
Motion
Vessel motion is fundamental to using simulation to create realistic operating conditions. Movement of the visual scene is used to create an illusion of physical motion. Movement of the training platform is used to create a physical sensation of motion. Sometimes, as in visual flight simulators, both visual and physical motion are used to create a realistic operating environment.
Simulation Sickness
Simulation sickness is a form of motion sickness. It occurs when an individual is exposed to cues or conditions that are out of balance with the operating conditions to which humans are acclimated. To date, simulator sickness has not emerged as a problem in ship-bridge simulators or manned models. Simulator
sickness may not be a problem for the category of vessels being simulated due, in part, to the lack of strong acceleration and deceleration forces and the general care given to achieving high fidelity with respect to own– ship vessel motion in the visual scene.
The advent of motion platforms with six degrees of freedom and the ability to include heave, pitch, and roll in the visual scene as well as surge, sway, and yaw have the potential to cause physical discomfort. To mitigate the potential for motion sickness, motion platforms and the visual scene need to be well correlated. When they are not, any potential for simulator sickness may be exacerbated.
Motion and Training Objectives
The relative importance of visual and physical motion requirements depends on the training objectives with respect to:
- establishing credibility, with the participants in a simulation,
- degree of fidelity needed to support training objectives and transfer of training, and
- the mitigation of artificial conditions that could lead to physical discomfort.
All of marine simulations related to navigation and piloting require that motion be conveyed in a way that enables participants to:
- determine the vessel's movement in relation to geographic references,
- detect other vessels, and
- determine the relative movement between vessels and other objects.
Encounters and interactions with other vessels are routine, and vessel maneuvering and navigation depends to a considerable extent on movement in relation to other vessels and fixed objects. Actual physical motion is very difficult to correlate with movement of the visual scene in a computer– based simulation. Physical motion, however, is not required to achieve most training objectives."dedication">
Degrees of Freedom
Motion is categorized in terms of degrees of freedom. A minimum of three degrees of freedom is required for basic movement in the two– dimensional horizontal plane. In the marine environment and marine simulation, movement occurs in a line parallel to the vessel's centerline (surge), perpendicular to the vessel's centerline (sway), and rotational movement (yaw). The remaining three degrees of freedom are roll, heave, and pitch. Surge, sway, and yaw can be simulated using:
- a visual scene,
- a birds-eye electronic presentation such as radar or automatic radar
- plotting aids (the standard devices) or an electronic charting system with integrated real-time electronic navigation signals, or
- a combination of visual scene and electronic navigation aids.
Surge, sway, and yaw are fundamental to vessel movement and therefore must be incorporated into any marine simulation for it to be realistic.
Virtually all forms of marine simulators, including desktop simulators, are capable of simulating surge, sway, and yaw and are thus capable of providing the three basic degrees of freedom. The ability to provide the basic three degrees of freedom does not, however, guarantee a credible, relevant, or even useful simulation by itself. There are great differences between the training media and their representation of motion. Although both a full-mission ship-bridge simulator and a microcomputer desktop simulator can depict an identical maneuvering situation with three degrees of freedom, the training environment in which the situation is experienced is completely different.
Relevance of Physical Motion
The highest level of simulation would include a motion platform with six degrees of freedom and perfect correlation of physical motion and visual scenes. The experience of mariner instructors, however, is that most training objectives can be obtained without physical motion platforms if motion in the visual scene is of relatively high fidelity. Physical motion cues are not critical to the training objectives for most vessels and most operating environments being simulated. In addition, most physical cues in a harbor or waterway caused by waves or swells at sea would normally fall below the thresholds at which they would be detected by human operators, or they would not appreciably affect individual performance if not experienced.
In general, operators of large vessels during normal operations in ports and waterways do not experience rapid acceleration and deceleration forces. They would, however, experience physical motion cues during collisions, touching the pier when mooring, running hard aground, or deceleration forces during anchoring evolutions. Since these events are terminating factors in a simulation, the absence of physical motion to signal their occurrence is only a weakness, not a fatal flaw, in achieving most instructional objectives. Acceleration and deceleration forces also are more likely to be experienced on small ships.
Although there is little information on the degree to which motion platforms contribute to vessel simulation, they could potentially be applied to specialized training situations, including ice operations (e.g.,conditions in which deceleration forces are commonly experienced) and mooring of small resupply vessels alongside offshore platforms. To perform effectively under physical movement conditions, however, it is necessary for the individual to first become competent
with the fundamentals required to perform effectively in more difficult operating conditions. For this reason, the opportunity to use motion platforms depends heavily on the trainees' experience and expertise, in addition to instructional objectives.
Introducing wave effects through physical motion has been incorporated into some ship-bridge simulators. Using physical motion to represent wave and other motion effects is not a new concept, although it has been used sparingly. One facility originally installed a motion platform in its nighttime spotlight-generator simulator to aid in the instruction of heavy-weather maneuvering. Only heave, pitch, and roll were used because of difficulty in correlating surge, sway, and yaw with the visual scene. Another simulator facility installed a motion platform for training deck officers in handling supply vessels alongside offshore platforms and for ice-breaking operations. Another facility produces wave effects through the combination of physical motion and CGI. In each case, the projection screens have been located off the ship-bridge motion platform. The only marine simulator that features a motion platform with attached projection screens is the U.S. Navy's air-cushion vehicle simulator in San Diego, California. For that facility, the modeling of motion effects, including the correlation with the visual scene, was reported to have been very complicated and difficult.
Manned Models
Manned models always provide six degrees of freedom because the models are scale versions of real ships, and they operate in a real environment. The principal factor affecting fidelity in manned models is the ability of trainees to adjust to the scaling factors with respect to time and size during training, then interpolate their results to actual operations (common scaling factors can increase velocities and reaction times by as much as ten times as fast as real life).
Computer-Based Simulators
For computer-based simulators, depending on the nature and form of the simulation, motion must be evident in the visual scenes, the electronic navigation displays, or both. In the case of full-mission and multi-task ship-bridge simulators, both visual and electronic navigation displays are necessary because both are essential elements of standard navigation and piloting practices.
The primary electronic navigation display that conveys motion is radar. Information from the radar screen or radar ranges and bearings are plotted on a nautical chart. Other options include data plotted from electronic navigation aids, such as Loran or electronic charting and positioning systems. Electronic charting systems are available in only a small number of ship-bridge simulators.
External Elements and Capabilities
A complete simulation features various elements and capabilities that are external to the ship-bridge mockup. Linking of simulators, traffic ships, aids to navigation, noncharted points of reference, vessel traffic service (VTS) systems, assist tugs, and noise are a few examples.
Linking Simulators
Limited-task radar simulators, which consist of a number of linked bridge simulators, have been used for a number of years. Some newer simulator facilities have more than one full-mission ship-bridge simulator. In these facilities it may be possible to link those full-mission simulators to achieve certain, well-defined training objectives. Linking of this type is used most frequently for courses such as bridge team management, emergency procedures, bridge watchkeeping, and pilot training. Benefits of linking might include:
- ability to train rules of the road with multiple ships (though this may be very expensive),
- ability to simulate communications among several vessels, and
- some limited pilot training, such as channel passing and overtaking situations (though these are more effectively trained in manned models).
The cost of linking full-mission simulators, however, can be substantial. Use of several simulators simultaneously requires extra control and may divert attention from the primary task of monitoring student actions (and achieving objectives). In addition, training objectives and scenarios of two or more groups seldom coincide. The linking may therefore be of limited interest to all groups for only short periods.
Traffic Ships
Training scenarios frequently involve interactions with other vessels, referred to as traffic ships. The degree to which traffic ships and their movement patterns realistically portray local operating conditions affects the credibility of the simulation for individuals who are familiar with the simulated operating area. These conditions need to be as faithful as possible to real conditions to minimize the potential for creating false or misleading perceptions that could adversely affect real operations. Traffic ships need to be preprogrammable for automatic operation as well as manually controllable. Otherwise, the simulation would be very limited in its ability to provide realistic operating conditions or to provide a capability for causing traffic ships to react to own ship maneuvers.
The traffic ships capability varies widely among simulators. Some of the early simulators have very limited traffic ship capabilities, whereas the newest
ship-bridge simulators can generate up to 60 other ships of widely varying types. The actual number of traffic ships used needs to be synchronized with the instructional objectives and within the practical management capabilities of the instructional staff.
Limitations in a simulator's traffic ship capabilities can be compensated to some extent by linking simulators. For example, one simulator facility compensates for limitations in traffic ships by linking three limited-task simulators to its ship-bridge simulator. The tradeoff in linking simulators is some loss of the control over the exercise in return for increased interaction among participants.
Aids to Navigation
Aids to navigation are fundamental to marine operations and need to be faithfully replicated in simulations to achieve functional and physical fidelity. Because they are principally what cadets use as references for navigation and piloting, aids to navigation are especially important to cadets. In contrast, experienced mariners tend to combine use of navigation aids and noncharted reference points (such as natural ranges).
Errors in the positioning, characteristics, or numbering of aids will discredit a simulation because that information is readily available on navigation charts. Generally, aids to navigation are displayed adequately, although there can be problems with jumpiness in the visual scene due to slow update rates. There can also be problems with light intensity and size, which affect visual acquisition of these aids and depth perception.
Noncharted Points of Reference
Credibility of the visual scene for mariners depends largely on the inclusion of commonly used noncharted reference points (e.g., a church steeple or clock tower). In general, the inclusion of noncharted reference points is limited more by the cost of establishing and validating the database for the setting than by the technology. Failure to include these references would discredit the simulation for piloting purposes and demonstrates a lack of attention to essential detail by the simulator facility staff and the provider of the visual scene.
Transit Information and Vessel Traffic Services
Most of a vessel's operations during a routine port entry or departure do not need to consider the entire traffic situation within the port and waterway complex. The simulation only needs to consider the traffic a vessel will encounter along its planned route within the simulation time span, sequentially rather than collectively. In some cases, substantial advance passage planning is required because the intended route and timing of passage may depend on prospective conflicting traffic at
chokepoints, tides, currents, and changes in berthing and anchorage assignments. In these cases, that information needs to be planned into the scenario.
The means for providing advance transit information to vessels varies by operating area. In some locations, mariners need to listen closely to the radio because there are no information or advisory services in operation. In some areas, VTS and VTS-like systems that provide navigation and traffic information have been installed. Usually communication with a VTS system is not the main objective of ship-bridge simulator-based training. Therefore, the instruction staff will sometimes role-play via voice radio to provide essential information. If more complete VTS role playing becomes necessary, a substantially improved capability is needed. Realistic VTS simulators are available and can be linked with full-mission or limited-task simulators, although training objectives do not normally coincide to any useful degree.
For realism, background VTS communications are sometimes prerecorded and played on radio speakers on the bridge. Care must be taken that the background information does not involve information relevant to the vessel's operation or become distracting, unless specifically needed to achieve instructional objectives.
There are a few facilities that provide both ship-bridge and VTS simulator-based training. This linked training can serve instructional objectives for both vessel and VTS operators. Another alternative is for a qualified VTS watchkeeper to role-play the VTS function. Additional staff may be required to control tugs used in mooring operations on a full-mission ship-bridge simulator.
Assist Tugs
Assist tugs are needed for shiphandling during mooring operations and for tug escorts. The capability of simulating the forces for assist tugs varies by the mathematical model used and is generally adequate to serve instructional objectives. The physical forces exerted by escort tugs when they come alongside are more difficult to model because the data on physical forces involved in these interactions during passage through piloting waters are limited. Recent simulator-based research into escort tugs for tanker operations in Prince William Sound, Alaska, has contributed to improved knowledge in this area (Gray et al., 1994). It is unknown at this time if the insights gained from this research have been adapted to any ship-bridge simulators.
Noise and Vibration
Noise and vibration are important to marine operations because certain noises provide important, if subtle, cues. Mariners routinely detect major changes through shifts in noise and vibrations. The most important noise is the propulsion system (i.e., engine noise). Changes in engine noise and vibration are normally the first indication of a change in shaft revolutions.
Engine noise and vibrations associated with the propulsion system can be added to a ship-bridge simulator in various ways. For example, a low-frequency speaker can be mounted under the bridge deck of the simulator. The sounds and vibrations that are produced need to be correlated with the RPM indicators.
FINDINGS
Summary of Findings
In the application of simulation to training requirements, it should be recognized that there are differences in the levels of simulator component capabilities. Ship-bridge simulators can usually simulate a variety of ship types—from coastwise tugs to very large crude carriers. Each element of a simulation—the equipment simulated, the visual scene, and the motion—is important, but the relative importance of each element depends on the training objectives defined through application of the instructional design process. The creation of the illusion and the treatment of the simulation environment as being a real ship-bridge are important elements in training effectiveness.
Research Needs
In applying simulator components to objectives defined through the instructional design process, the committee identified many areas where existing research and analysis do not provide sufficient information for the committee to extend its own analysis.
The committee could find no quantitative data that address the question of how much realism (fidelity) is actually necessary to enable effective learning using simulators and simulations. Research in this area should look both at functional (how it works) and physical (how it looks) fidelity.
There is little information on the degree to which motion platforms contribute to vessel simulation. The committee agrees that motion platforms could potentially be applied for specialized training situations, but it believes that the usefulness of motion platforms will depend greatly on the trainees' experience and expertise and the accurate correlation of motion and visual cues.
REFERENCES
Gray, D.L., J.H. de Jong, and J.T. Bringloe. 1994. Prince William Sound Disabled Tanker Towing Study, Part 2. Report File No. 9282. Prepared by the Glosten Associates and the Maritime Simulation Centre Netherlands for the Disabled Tanker Towing Study Group,Anchorage, Alaska. Seattle, Washington: The Glosten Associates.
Hammell, T.J., K.E. Williams, J.A. Grasso, and W. Evans. 1980. Simulators for Mariner Training and Licensing. Phase 1: The Role of Simulators in the Mariner Training and Licensing Process (2 volumes). Report Nos. CAORF 50–7810–01 and USCG-D-12-80. Kings Point, New York Computer Aided Operations Research Facility, National Maritime Research Center.
Hammell, T.J.,J.W. Gynther, J.A. Grasso, and M.E Gaffney. 1981a. Simulators for Mariner Training and Licensing. Phase 2: Investigation of Simulator-Based Training for Maritime Cadets. Report Nos. CAORF 50-7915-01 and USCG-D-06-82. Kings Point, New York: Computer Aided Operations Research Facility, National Maritime Research Center.
Hammell, T.J., J.W. Gynther, J.A. Grasso, and M.E. Gaffney. 1981b. Simulators for Mariner Training and Licensing. Phase 2: Investigation of Simulator Characteristics for Training Senior Mariners. Report Nos. CAORF 50-7915-02 and USCG-D-08-82. Kings Point, New York: Computer Aided Operations Research Facility, National Maritime Research Center.
Hammer, J.A. 1993. Visual system fidelity in marine simulators: a practical guide. Pp. 153–161 in MARSIM '93. International Conference on Maritime Simulation and Ship Maneuverability. St. Johns, Newfoundland, Canada, September 26–October 2.
Hays, R.T., and M.J. Singer. 1989. Simulation Fidelity in Training System Design: Bridging the Gap Between Reality and Training. New York: Springer-Verlag.
Hettinger, L.J., R.S. Kennedy, and K.S. Berbaum. 1985. Tracing the etiology of simulator sickness. In Proceedings of the Conference on Simulators, Norfolk, Virginia, March 3–8.
NRC (National Research Council). 1992. Shiphandling Simulation: Application to Waterway Design. W. Webster, ed., Committee on Shiphandling Simulation, Marine Board. Washington, D.C.: National Academy Press.
Williams, K., J. Goldberg, and A. D'Amico. 1980. Transfer of Training from Low to High Fidelity Simulators. Report No. CAORF 50-7919-02. Kings Point, New York: Computer Aided Operations Research Facility, National Maritime Research Center.
Williams, K., A. D'Amico, J. Goldberg, R. DiNapoli, E. Kaufman, and J. Multer. 1982. Simulators for Mariner Training and Licensing, Phase 3: Performance Standards for Master Level Simulator Training. Report Nos. CAORF 50-8007-02 and USCG-D-15-82. Kings Point, New York:Computer Aided Operations Research Facility, National Maritime Research Center.























