
1
Introduction
The United States, by most standards, is the foremost maritime trading nation of the world. Nearly one-fourth of the world's trade flows through U.S. seaports. The U.S. Navy is the largest standing navy in the world. Investments by U.S. industry and government in ocean science and technology are unparalleled. In addition, U.S. research in the ocean sciences currently leads the world in most disciplines, from physical oceanography to marine biotechnology, and the U.S. educational establishment is a world leader in ocean science and engineering. But support for that research has declined steadily in the United States, while the nation's need for knowledge about the oceans has grown.
The national importance of maritime activities—both for managing resources and augmenting scientific understanding—will continue to increase in the decades to come. Studies of the chemistry and energy flows of the ocean and atmosphere are critical for predicting how the Earth's climate will change. Pollution from human activities needs to be assessed accurately so that appropriate action may be taken. Ocean plant and animal resources require better management to help feed the world's swelling population. (Stocks of fish, in particular, are increasingly heavily exploited throughout the world and need better monitoring and ecological study.) Nonliving resources such as minerals and various forms of energy, both renewable and nonrenewable, could be supplements to terrestrial supplies. Scientific studies of the Earth's crustal plate boundaries (fundamental features of the planet's structure, most of which are underwater) will be needed to help predict earthquakes, among other reasons. The stunning discovery of hydrothermal vents at the mid-ocean plate boundaries and the associated food chains based not on photosynthesis, but on chemosynthesis, is another example of the rich contributions that ocean exploration offers.
In recognition of the growing importance of the oceans to human society, the United Nations Law of the Sea Treaty has come into force. This treaty spells out national rights and responsibilities for exploiting and protecting the ocean environment. For the United States, the agreement added responsibilities for administering the use of the ocean surface, associated seafloor, and subseafloor in an area equivalent to 75 percent of the nation's land area. The new realm is the exclusive economic zone (EEZ), a roughly 200-mile band along the coastlines over which the United States has exclusive development rights and responsibilities for environmental protection.1 The treaty will establish a more secure environment for investment, encouraging activities for managing and exploiting ocean resources.
Oceanographers, ocean engineers, and those who use and manage the ocean's resources use a variety of platforms and payloads, including Earth-orbiting spacecraft, surface ships, moored and drifting buoys, towed sleds, and undersea vehicles, depending on the task at hand. To meet our national needs and commitments, these scientists, engineers, and managers will need to enhance the capabilities and productivity of methods for making measurements under the sea and on the seafloor and for performing work in sectors of the sea that are difficult, if not impossible, to access. This report focuses on undersea vehicles, which may serve as platforms for varied sensors and work devices and may be operated as independent units or as parts of larger systems, such as ships, satellites, buoys, and towed sleds. It should be noted that many technical issues related to sensors, communications, navigation, and power are common to undersea vehicles, buoys, and sleds.
Undersea vehicles have replaced divers in many applications because they can go deeper, stay down longer in greater safety, and carry a variety of sensors. The evolving technologies of remote sensing, remote control, and automation ensure that undersea vehicles will continue to extend the
human reach to the deepest parts of the ocean. Some of the functions performed by undersea vehicles are:
-
making observations, either with remote sensors (e.g., video or still cameras, laser scanners, or scanning sonars) or through direct observation by occupants of vehicles
-
logging or displaying data from contact sensors (e.g., physical, chemical or biological instruments)
-
manipulating tools or work packages to perform scientific and industrial tasks
-
retrieving samples or artifacts
-
navigating beneath the surface, logging the vehicle's trajectory
-
responding to control instructions from a human operator or computer
Many of these capabilities are in use or under development in industry to support the offshore oil and gas industry and other marine industries. Others contribute to government missions and will require development support from government. The remaining chapters of this report detail current vehicle technical capabilities, present and potential applications for vehicles, needed technical advances, the committee's recommendations for priorities in development and how to achieve and implement these improvements.
UNDERSEA VEHICLES DEFINED
An undersea vehicle is a mobile, controlled, self-propelled subsurface platform capable of carrying sensors and tools. It may or may not be occupied and/or piloted by humans. Three broad types can be distinguished: deep submersible vehicles (DSVs), remotely operated vehicles (ROVs), and autonomous underwater (or undersea) vehicles (AUVs). While these broad categories are useful for analysis and discussion, there are many variations and hybrids. For example, an untethered vehicle with high-level control provided by an acoustic data link to a supporting surface ship or shore station is not completely autonomous; nevertheless, it is classified as an AUV in this report.
Undersea vehicles are not new, having functioned in some form or another for over four decades. However, the rapid advances in technologies and systems integration that have taken place in the past two decades have allowed great improvements in the performance of sensors, communications, navigation, and control. New capabilities and scientific uses for submersibles have emerged, and others are on the horizon that could greatly expand the type, quantity, and quality of information that can be derived. Because of these improvements, use of undersea vehicles is being considered in disciplines where they have seen very little activity in the past, such as physical and chemical oceanography, as well as in marine geology, biology, and mid-water benthic studies, where they are currently used. Many of these same improvements have also enhanced the performance of buoys and towed sleds.
Deep Submersible Vehicles
More than 200 DSVs have been built worldwide since the late 1950s. DSVs are human occupied, generally by a pilot and a crew of two. Most are deep probes that must travel more vertical than horizontal distances to accomplish their missions. DSVs carry tools, sensors, and sampling devices; and missions generally do not exceed 16 hours. DSV diving operations are supported by mother ships. Most DSV operations involve many dives without returning to port. Operating depths range from a few hundred meters to nearly 6,500 meters. The committee estimates that today about 42 DSVs are operational worldwide. That estimate is uncertain, however, because some of the activity in this field has been carried out by the military and is classified. Appendix E lists the world's known DSVs. Figure 1-1 shows Alvin, which is the oldest DSV in service and has completed the greatest number of dives; Figure 1-2 illustrates Deep Rover, one of the newest DSVs. There are also more than 40 tourist submersibles in service throughout the world that carry up to 64 passengers each on rides to depths of 30 to 50 meters. These submersibles share some attributes with DSVs. They help maintain the industrial base and development of some materials and provide useful operational training and maintenance experience. However, this committee does not consider them as being DSVs since they are not designed or intended to perform work tasks and because of their shallow depths of operation (< 50 meters).
Remotely Operated Vehicles
ROVs are unoccupied, tethered submersibles with umbilical cables that carry electrical power, sensor data, and control commands. The pilot or operator is remote from the work site but maintains control of the vehicle. ROVs are used mainly in offshore oil and gas operations for various inspection and manipulation tasks, and they have replaced divers in many jobs in that industry. ROVs are also widely used for laying undersea cables, and, as offshore development moves into deeper waters, ROVs will be increasingly required.
Typically, the human operator of an ROV works at the telemanipulation level, piloting the vehicle and controlling its manipulators through direct coordinated control using joy sticks. However, recent advances in control architecture provide the option of using object-oriented, task-level control, which allows the operator to issue commands at the task-level rather than having to coordinate vehicle manipulator and instrument control operations continually. This innovation allows the operator to return to the lower-level task when necessary. Vehicle sizes range from small, portable, swimming television cameras that weigh only a few kilograms to
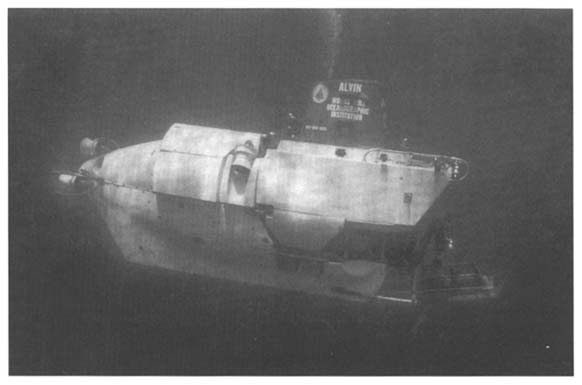
FIGURE 1-1 Photo of Alvin (Woods Hole Oceanographic Institution/Navy). The U.S. Navy-owned Alvin has been operated by the Woods Hole Oceanographic Institution since 1964. Its depth capability is 4,500 meters. It carries a crew of three and has made over 3,000 scientific dives. Source: Woods Hole Oceanographic Institution.

FIGURE 1-2 Photo of Deep Rover (Deep Ocean Engineering, Inc.). Two Deep Rover* 1002s were built by Deep Ocean Engineering, San Leandro, California, in 1994 and delivered to a French television production company. These are two-person DSVs, designed to operate to 1,000 meters. Source: Deep Ocean Engineering, Inc. *Registered trademark of Deep Ocean Engineering, Inc.
huge work systems that can weigh several metric tons. The committee estimates that since the early 1970s, more than 1,000 ROVs have been put into service worldwide. Depth ranges for ROVs are now from a few meters to 11,000 meters. Figures 1-3, 1-4, and 1-5 illustrate a cross-section of ROV types: Phantom (Deep Ocean Engineering), a light vehicle for inspection and observation tasks; Triton 19 (Perry Tritech), a heavy-work vehicle typically used in the offshore oil industry; and Ventana (Monterey Bay Aquarium Research Institute), designed for science missions.
Autonomous Underwater Vehicles
AUVs are unoccupied submersibles, generally without tethers or umbilical cables, although some are fitted for specific missions with a very fine fiber-optic filament that can transmit data to the launching station. All power is supplied by on-board energy systems (such as batteries or fuel cells). Nearly all AUVs are developmental systems. AUVs encompass a range of systems, from relatively simple and inexpensive to quite complex. They share many key technologies (sensors, power, navigation, and communications) with moored and drifting buoys.
AUVs today typically have entire missions programmed in their on-board controllers before launch. Remote control
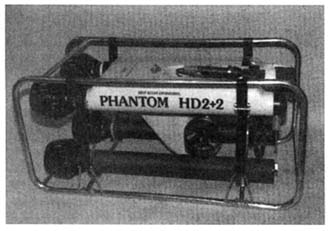
FIGURE 1-3 Photo of Phantom (Deep Ocean Engineering, Inc.). The Phantom* HD2+2 was developed by Deep Ocean Engineering, San Leandro, California, in 1985. There are 14 Phantom designs in the series. The Deep Ocean Engineering, Inc. has delivered over 300 Phantoms to 22 nations and 7 navies. Source: Deep Ocean Engineering, Inc. *Registered trademark of Deep Ocean Engineering, Inc.
communication is not practical without a cable to carry signals because radio waves are strongly attenuated in water. However, advances in acoustic communications have increased the effective bandwidth, and new architectures for task-level control, which has a lower bandwidth requirement than low-level control, have made real-time human

FIGURE 1-4 Photo of Triton 19 (Perry Tritech). The Perry Tritech Triton 19 is designed for operations to 1,000 meters deep and weighs 2,450 kilograms in air, Triton 19, which has a 227-kilogram payload capability, began operations in 1994 in support of the Shell Auger Tension Leg Platform in the Gulf of Mexico. Source: Perry Tritech, Inc.
control of untethered vehicle missions a powerful new possibility. (Of course, incorporation of such systems would blur the distinction between autonomous and remotely controlled categories of vehicles.) The military has supported most of the developmental work on AUVs. Fewer than 100 AUVs have been built worldwide since 1970, nearly all of
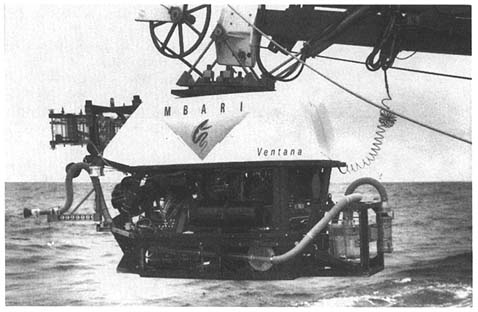
FIGURE 1-5 Photo of Ventana (Monterey Bay Aquarium Research Institute). This vehicle conducts a variety of oceanographic research tasks in biology, geology, and chemistry, to depths of 1,850 meters. Operational since 1988, it has made over 900 research dives and has logged more than 5,000 hours under water. Source: Bruce H. Robinson, Monterey Bay Aquarium Research Institute.
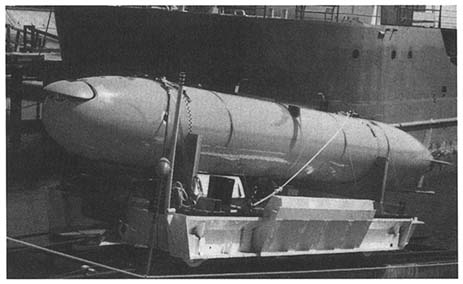
FIGURE 1-6 Photo of UUV II (Charles Stark Draper Laboratory for DARPA). The DARPA-U.S. Navy testbed unmanned, undersea vehicle was designed and built by the Charles Stark Draper Laboratory. Two vehicles have been built and are intended to validate enabling technologies for the Navy's tactical acoustical system and the autonomous mine-hunting and mapping mission. Source: Charles Stark Draper Laboratory, Cambridge, Massachusetts.
them by the military. Small, low-cost AUVs, such as the Odyssey system being developed by the Sea Grant Undersea Vehicles Laboratory at the Massachusetts Institute of Technology (MIT), offer the potential for use in multiples. If costs can be kept low enough without compromising
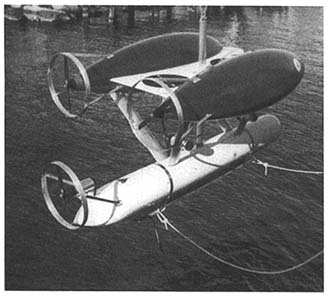
FIGURE 1-7 Photo of the autonomous benthic explorer (ABE) (Woods Hole Oceanographic Institution). ABE was designed and built by Woods Hole Oceanographic Institution with National Science Foundation funding to monitor deep ocean hydrothermal systems. ABE can operate to a depth of 6,000 meters and remain on-station for many months. Source: Woods Hole Oceanographic Institution.
performance, they could be deployed in fleets to make observations at high temporal and spatial resolution (see, for example, Curtin et al., 1993, and Stommel, 1989). Figures 1-6 through 1-9 illustrate several AUVs, showing a range of vehicle sizes.

FIGURE 1-8 Photo of Theseus (International Submarine Engineering, Ltd.). Theseus is a multipurpose autonomous underwater vehicle developed by International Submarine Engineering, Ltd. for the Canadian Defence Research Establishment Pacific. The vehicle is undergoing test trials. Operations to 1,000-meter depth extending up to 350 kilometers have been demonstrated. Source: International Submarine Engineering, Ltd.
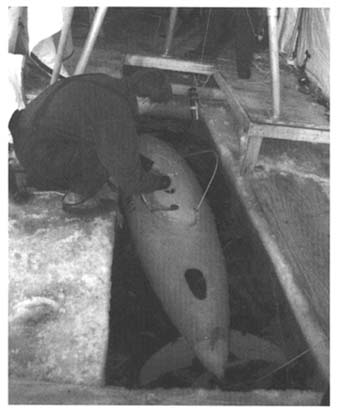
FIGURE 1-9 Photo of Odyssey I (Massachusetts Institute of Technology). Odyssey I, which was launched in 1992, is the first in a series of small AUVs designed and operated by the Sea Grant Undersea Vehicles Laboratory to map under ice fields and respond to volcanic events near ocean ridges. Operational depth is 6,000 meters, and displacement is 195 kilograms.
Source: Massachusetts Institute of Technology Sea Grant.
EVOLUTION OF UNDERSEA VEHICLES SINCE THE 1950S
In the United States, as in most other maritime nations, interest in the exploration of the sea has come in waves, each prompted by an industrial or governmental need. With each wave has come a new generation of undersea vehicles. Undersea vehicles made their first important contributions before World Ward II (in gravity measurements for the U.S. government), but their serious development in the United States did not begin until the 1950s.
Vehicle Development from the 1950s through the 1990s
The 1950s. In the 1950s, the cold war rivalry with the Soviet Union led to the first nuclear submarine; a submerged circumnavigation of the world; and, in 1959, the first transits under the North Pole by the U.S. Navy nuclear submarines Nautilus and Skate. In 1958, the Navy also purchased the world's deepest-diving submersible, the bathyscaphe Trieste, which had been developed by private interests in Switzerland and Italy.
The 1960s. The 1960s saw a continued military emphasis on methods for performing undersea tasks, but it was submersibles, human-occupied and unoccupied, and advanced diving technology that were prominent at this time. In 1960, the Navy's Trieste successfully dove to the deepest place in the world ocean (the Challenger Deep in the Mariana Trench, approximately 11,000 meters deep) in the culmination of a year-long deep-diving project. The bathyscaphe Trieste was a design first built in the 1940s; later versions of the Trieste were operated until 1982. Navy laboratories and government contractors also developed the first practical ROVs in the 1960s. The ROVs were intended for use in recovering torpedoes from the seafloor. The controlled underwater recovery vehicle (CURV) series of ROVs emerged from this development, and a CURV was used to recover the nuclear bomb from the sea off Palomares, Spain, in 1966. Also during the 1960s, the Navy's Sea Lab pursued a program of human habitation on the seafloor that pushed the limits of diving physiology and technology. The 1960s also found many of the large aerospace companies entering the submersibles field, and many new human-occupied vehicles were built and put into service by companies such as Grumman, Lockheed, General Motors, General Dynamics, and Westinghouse. Few of these vehicles remained in use beyond the end of the decade.
The 1970s. In the 1970s, development of undersea vehicles was split between the defense and civilian sectors. Military interest centered around the requirements of antisubmarine warfare (ASW). Vehicles were needed, for example, to gather oceanographic data, to act as decoys, and to carry out searches. Civilian programs supported offshore oil and gas development, which moved increasingly into deeper waters and included exploring for seafloor hydrocarbons and supporting production operations in the North Sea. In the offshore industry DSVs and ROVs replaced divers in more and more of the areas of marine structure construction, inspection, and servicing.
By the end of the 1970s, virtually all of the DSVs had been replaced by ROVs. A significant exception was a handful of DSVs used mainly for marine scientific research. In the United States, examples included the Navy-owned Alvin (operated by Woods Hole Oceanographic Institution), Sea Cliff, and Turtle; the Johnson Sea-Link, owned by the Harbor Branch Oceanographic Institution; and the Delta, owned and operated by a for-profit company that primarily supplies oceanographic research services. These vehicles have made possible important scientific discoveries. Alvin, for example, provided access to the hydrothermal vents at the ocean spreading centers. The vehicles are also used for searches of the bottom and other work tasks. As shown in Figure 1-10, Johnson Sea-Link is configured for civilian scientific missions.

FIGURE 1-10 Photo of Johnson Sea-Link (Harbor Branch Oceanographic Institution).
The Johnson Sea-Link I and II DSVs were designed and built by Harbor Branch Oceanographic Institution and commissioned in 1971 and 1972. These vehicles are intended for research in the marine sciences, are classed and certified to a maximum operating depth of 2,344 meters, and have conducted over 7,000 dives.
Source: Harbor Branch Oceanographic Institution.
During the 1970s, significant AUV development began. The University of Washington's two AUVs, Spurv and Uars, successfully collected oceanographic data, including some from under the ice. The first deep-diving AUV, France's Epaulard, performed more than 500 dives—many of them to 6,000 meters—operated video cameras, and communicated with the surface over an acoustic data link.
The 1980s. In the 1980s, concern with ASW continued. Growing Navy spending supported the development of several early AUVs for various military missions. The number of piloted submersibles available worldwide continued to decline as commercial users shifted their interests to ROVs, which were demonstrating increasing work capabilities at lower cost each year and relieved concerns about risks to human operators. By the early part of the decade, ROVs became the dominant platform for performing undersea work offshore. In addition to the work-class ROV, the early 1980s witnessed the emergence of a large variety of small (<50 kg) ROVs, sometimes called low-cost ROVs, or LCROVs, many of which were designed for special purposes or missions.
To meet scientific and defense-related objectives in the 1980s, four nations (France, Japan, Russia, and the United States) organized, built, and operated DSVs that could be used at depths to 6,500 meters. These vehicles remain operational today. The U.S. Navy Sea Cliff, modified from a shallower-diving DSV, is one of five deeper-diving DSVs developed in the 1980s. France's IFREMER2 designed and built the 6,000-meter Nautile, and the Russian Academy of Sciences purchased two Finnish-built MIR-class submersibles that also can operate to that depth. The Japanese Shinkai 6500 (see Figure 1-11), launched in 1989, can dive to 6,500 meters; it is the deepest-diving DSV in the world today.
The few AUVs built in the 1980s were mainly experimental vehicles. The goal of Unmanned Undersea Vehicle
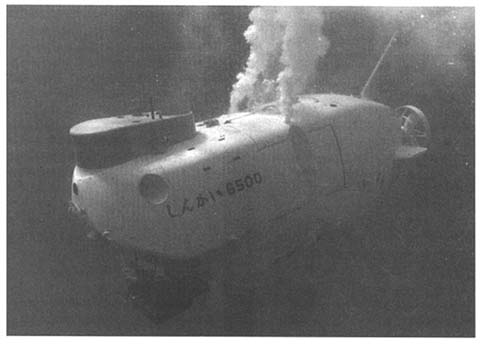
FIGURE 1-11 Photo of Shinkai (Mitsubishi Heavy Industries/Japan Marine Science and Technology Center). Shinkai 6500 was built by Mitsubishi Heavy Industries, launched in 1989, and is operated by Japan Marine Science and Technology Center. Shinkai 6500 carries a crew of three and is capable of diving to 6,500 meters, making it the deepest diving DSV in the world. Source: Japan Marine Science and Technology Center.
project, begun in 1988 under a joint Defense Advanced Research Agency (DARPA)3 U.S. Navy Program was to demonstrate that AUVs could fulfill special Navy mission requirements. The two testbed vehicles that emerged from this project were designed and built by the Charles Stark Draper Laboratory (see Figure 1-6). Since the inception of the program, the goals have been modified to include technology development critical to increasing the role of AUVs in undersea warfare, particularly in mine-hunting and mapping. The project focus is on fuel cells, acoustic communications, and more accurate navigation systems. The two ARPA-Navy vehicles are large,4 medium-depth-capable vehicles that continue to serve as testbeds. Classified AUVs may still be operated by the military, but such information was not available to the committee.
The 1990s. The increasing utility and reliability of ROVs in offshore operations during the 1980s resulted in broad acceptance of this type of vehicle platform, including for applications outside of the industry, such as underwater telecommunications and nuclear facility inspection and maintenance. By the early 1990s, both ROVs and their services were commonly supplied by offshore oil service organizations rather than by oil companies.
One type of ROV range and complexity is illustrated by Kaiko (see Figure 1-12), which was developed and tested by the Japan Marine Science and Technology Center (JAMSTEC). In March 1995, Kaiko dove to the deepest known place in the world ocean, the Challenger Deep, in the Mariana Trench in the Pacific Ocean (11,033 meters).
Public interest in undersea vehicles has been captured by a series of deep ocean explorations in the past decade. Using submersible platforms has facilitated major deep-seafloor discoveries in the life sciences and geosciences and has provided dramatic video of towering deep ocean vents in action. But it has been the discovery and imaging of famous shipwrecks, such as the Titanic, Bismarck, and Lusitania, by teams from the Woods Hole Oceanographic Institution, led by Dr. Robert Ballard, that have made people worldwide aware of what can be done in the deep ocean with in situ platforms. In the United States, the privately funded Jason Project uses telecommunications to create a powerful educational tool that lets students observe deep-diving expeditions in real-time, via satellite, and even lets them take control of the remote manipulators. Recovering evidence from crashed aircraft, for example, flight recorders, doors, and engines, at depths up to 6,000 meters has made deep ocean search and recovery seem routine to much of the public. However, the
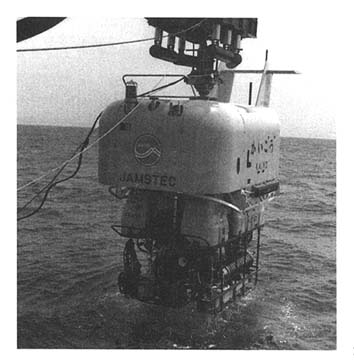
FIGURE 1-12 Photo of Kaiko. Built by Mitsui Engineering and Shipbuilding Company and operated by Japan Marine Science and Technology Center, Kaiko reached the deepest ocean depth at approximately 11,000 meters in March 1995, establishing a record depth for an undersea vehicle (nonbathyscaphe). The system includes two elements shown in this photo: the lower part is the ROV itself; the upper part is its "garage" or carrier.
Source: Japan Marine Science and Technology Center.
search and recovery capabilities are quite limited, and the deepest ocean areas—beyond 6,000 meters, down to 11,033 meters—remain out of practical reach.5
U.S. TRENDS IN UNDERSEA VEHICLE DEVELOPMENT AND USE
U.S. government and industry investment in undersea vehicle research and development today is far less than during the peak years, the 1960s and 1970s. The U.S. Navy, a primary sponsor of underwater vehicle research and development, achieved most of its fundamental technical objectives for undersea vehicles in the 1960s and 1970s. Those DSV assets that remained, mainly in the U.S. Navy, are substantial, although increasingly outdated. In the civil sector, the initial rush of aerospace companies into DSV development ended, and the offshore oil and gas industries began to find uses for ROVs. In the 1980s, the decline in military development of DSVs was not offset by a pickup in commercial demand. These factors resulted in considerable cutbacks in fast-moving, innovative technology development.
With the end of the Cold War, the Navy opened access to its DSVs more widely for civilian scientific research. The Deep Submergence Science Committee (DESSC) provides schedule coordination and oversight for many of the DSVs supporting this research, including Alvin and more recently Jason-Medea. Supported jointly by the National Oceanic and Atmospheric Administration (NOAA), the National Science Foundation (NSF), and the Navy, DESSC is supported by a University-National Oceanographic Laboratory System grant funded by the National Science Foundation, the National Oceanic and Atmospheric Administration, the Office of Naval Research (ONR), and other agencies. The U.S. Navy DSVs (Turtle and Sea Cliff), are now used to support civilian-related research up to 60 days each year. Alvin, owned by the Navy and operated by the Woods Hole Oceanographic Institution, is used for civilian science projects.
The National Undersea Research Program (NURP) of NOAA operates and leases undersea vehicles, making them available for scientific missions. Available DSVs include the Johnson Sea-Link I and II and Clelia, owned by the Harbor Branch Oceanographic Institution, and the Delta , owned by Delta Oceanographics. A variety of smaller ROVs, owned by NURP centers, are also available for scientific missions.
The last government-financed DSVs were completed a quarter of a century ago—two highly specialized deep submergence rescue vehicles (DSRVs). In the commercial sector only four work submersibles have been completed since 1983. Similarly, U.S. government support for developing ROVs virtually ceased 15 years ago, except for the Navy-supported Jason-Medea ROV project (>2,000-meter depth), which gave scientists an ROV able to reach deep waters. The offshore oil and gas industry is the primary motivating force in ROV technological advances. Most government procurements for these vehicles are for modified off-the-shelf equipment from commercial vehicle makers. Makers of AUVs are receiving modest amounts of research and development funding from the U.S. government or are developing these vehicles in-house. The committee was unable to obtain budget figures for government programs.
Efforts are being made to transfer more military developed technology (including undersea vehicle technology) to the civil sector. Some vehicles, and their related technologies, that were originally developed for national defense are now available for transition to dual military and civil use. The Naval Command, Control, and Ocean Surveillance Center in San Diego, California, for example, recently turned the autonomous unmanned search system (AUSS) over to Oceaneering International, a contractor for the Navy Supervisor of Salvage. This AUV previously was used for classified search missions.
The basic technologies used to build AUVs are largely unclassified, but the committee did not have access to classified government work. Military research and development of undersea vehicles may be in progress, and military vehicle
systems may be operational; these systems may already have capabilities that are not yet developed in the civil sector. Since the civilian sector was the focus of this study, the committee could include only unclassified military technologies that could be transferred from defense programs.
FOREIGN PROGRAMS
The U.S. government, which pioneered undersea vehicle technology in the 1950s and 1960s, cannot be said to place a high-priority on undersea vehicles today. As noted in the previous section of this chapter, the government has gradually withdrawn support for its DSV programs, beyond what is necessary to keep them running. The U.S. Department of Defense supports some AUV research and development, but most ROV activity remains in the private sector.
Other nations have assumed leadership in many areas of undersea vehicle technology, although no single nation has assumed broad world leadership. Through JAMSTEC, Japan has pursued an intensive national program of undersea exploration using undersea vehicles, including an ambitious program of diving to nearly 11,000 meters—the very bottom of the ocean—with the ROV Kaiko (working with the 6,500-meter, tether DSV, Shinkai). The general goal of the Japanese program is to understand the Earth's crustal structure and seabed resources.
Some European governments (e.g., the United Kingdom, France, and Norway) also tend to support research and development in this area more generously than does the United States. The economic stimuli in Western Europe are largely the need to manage fisheries and develop offshore oil and gas sources. The European Commission funds cooperative research and development in subsea technology, including the development of standards (Seymour et al., 1994). Commission funding of cooperative, multinational projects in vehicle automation, sensing, and manipulation through the Marine Science and Technology (MAST) program is also significant—on the order of 25 million ECU annually (about $31 million).
The 20 or more undersea vehicles developed by the former Soviet Union are largely the products of military programs. Today they are carried on in the hopes of marketing the military technology. Both Russia and Ukraine have skilled work forces and sophisticated test facilities and have produced an array of DSVs, ROVs, and AUVs, including impressive ROVs and AUVs developed in the Russian Far East, and the MIR-class DSVs (Mooney et al., 1996). A range of advanced hull materials, some derived from spacecraft, are a particular strength of these programs. As of mid-1994, the Russian and Ukrainian programs were inactive except for the vehicles under contract to Western users; however, both countries still have important potential as research and development centers (Seymour et al., 1994).
France's program, run by IFREMER, emphasizes DSVs, notably the 6,000-meter Nautile. However, IFREMER also has an ambitious 6,000-meter, science-dedicated ROV development program. French programs leading to integration of local sensor data for navigation and control also have great potential (Seymour et al., 1994).
The United Kingdom emphasizes the development of advanced sensors and affordable AUVs and ROVs that can be used in research and in the offshore oil and gas industry (Seymour et al., 1994). The United Kingdom initiated what is now known as the Autosub Program. The objectives of this program are to build and test a proof-of-concept vehicle and construct two AUVs: Dolphin, which would be capable of crossing the north Atlantic Ocean, taking' soundings and samples and transmitting data by satellite during periodic surface excursions; and Doggie, which would cover the ocean floor and acquire high-resolution data from high-frequency instruments. Doggie would support a subbottom profiler, magnetometer, and chemical sensors. At present, Autosub focuses on technology development rather than vehicle integration.
Norway, like the United Kingdom, is faced with the need to monitor and inspect deep water pipelines in the North Sea. Norway also places a high-priority on monitoring its waters for contamination from a number of scuttled Soviet nuclear submarines in the Arctic Ocean.
Canada's long coastline, some of it icebound during all but two or three months of the year, has induced the Canadian armed forces to support development of undersea platforms to access areas beyond the reach of surface support. Moreover, the ice-free fiords in the Vancouver, British Columbia, area offer excellent vehicle test sites adjacent to centers of research. Canadian development is continuing, with emphasis on AUV applications.
FINDINGS
Finding. The oceans are regions of vital human concern. Their study is necessary to understand the future of the global environment, sustain exploitation of living and nonliving resources, and advance human knowledge. The United States investment of human and capital resources in marine science and technology is probably the largest worldwide.
Finding. Undersea vehicles are important components of the nation's capability to work and study in the oceans. In combination with satellite remote sensing, surface vessels, and a variety of towed sleds and moored and drifting buoys, undersea vehicles offer unique qualities: flexibility, control, and direct human access to the deep.
Finding. From the 1960s to the end of the 1970s, the United States was a world leader in the development of all undersea vehicles; however, since that time much of this leadership has been lost. The major exceptions are U.S. development of ROVs for commercial use in the 1980s and some limited forms of AUV research supported by the military.
REFERENCES
Curtin, T.B., J.G. Bellingham, J. Catipovic, and D. Webb. 1993. Autonomous oceanographic sampling networks. Oceanography 6(3):86–94.
Mooney, J.B., H. Ali, R. Blidberg, M.J. DeHaemer, L.L. Gentry, J. Moniz, and D. Walsh. 1996. World Technology Evaluation Center Program. World Technology Evaluation Center Panel Report on Submersibles and Marine Technologies in Russia's Far East and Siberia, in press. Baltimore, Maryland: Loyola College of Maryland, International Technology Research Institute.
NRC (National Research Council). 1992. Working Together in the EEZ: Final Report of the Committee on Exclusive Economic Zone Information Needs. Washington, D.C.: National Academy Press.
Seymour, R.J., D.R. Blidberg, C.P. Brancart, L.L. Gentry, A.N. Kalvaitis, M.L. Lee, J.B. Mooney, and D. Walsh. 1994. World Technology Evaluation Center Program. Pp. 150–262 in World Technology Evaluation Center Panel Report on Research Submersibles and Undersea Technologies. Baltimore, Maryland: Loyola College of Maryland.
Stommel, H. 1989. The Slocum Mission. Oceanus 32(Winter 89/90): 93–96.











