
6
Small Satellites and Mission Architectures
OPTIONS FOR DISTRIBUTING SENSORS
A single-sensor satellite mission clearly calls for the smallest spacecraft bus that can accommodate the payload and the smallest launch vehicle that can deliver the satellite to the desired orbit, as this will be the most efficient and lowest cost solution. The right choice of launch vehicle is less obvious when a mission involves multiple sensors and options are available for the number of satellites, their size, and how to aggregate or distribute the sensors among them. The choices for such a mission include single-sensor platforms, multisensor platforms (e.g., Earth Observing System [EOS] AM-1, Polar-orbiting Operational Environmental Satellite [POES]), clusters, and constellations. Clusters refer to a collection of two or more satellites relatively closely spaced in a common orbit (formation flying). Constellations refer to a collection of satellites whose relative positions are controlled in each of multiple orbits; examples include the Global Positioning System (GPS) and the Iridium communication satellites.
Single-Sensor Platforms
Single-sensor platforms provide the greatest mission flexibility. Technically, they allow for unique orbits for each sensor, they avoid interference among sensors on a common platform, and they permit trade-offs between using the spacecraft bus itself versus additional sensor mechanisms to perform calibration or observing maneuvers. Programmatically, their relative simplicity makes them less subject to the schedule delays and budget impacts a late sensor delivery can have on multisensor programs. They typically require shorter mission development times (24 to 36 months) and can thus employ more current technology and deliver faster "time to science." A complement of sensors on multiple small satellites can be launched sequentially as budgets and schedules permit; and, in the case of a failed sensor, a direct replacement satellite can be launched without having to deal with residual assets on a multisensor platform.1 On the negative side, as discussed in Chapter 5, the U.S. fleet of small expendable launch vehicles suitable for small satellites (e.g., the Pegasus, Athena, Conestoga, and Taurus) are relatively unreliable at present, and the probability of one or more launch failures where multiple launches are
required is significant. Also, mission operations grow more complex and costly as the number of satellites needed to perform a mission increases.
Multisensor Platforms
Requirements for spatial and temporal simultaneity among measurements have traditionally led to the use of multisensor platforms. Placing multiple sensors on a common platform ensures contemporaneous measurements and permits coalignment such that they view the same scene simultaneously. This is always desirable when the measurements are complementary and is in some cases essential if full value of the data is to be realized.
While single-sensor platforms provide the greatest mission flexibility, multisensor platforms have a higher probability of delivering an equivalent number of sensors to orbit because they require fewer launches and use more reliable launch vehicles (e.g., Delta, Atlas).2 Multisensor platforms also offer simpler ground system operations with fewer spacecraft to control and fewer data downlinks.3 On the other hand, design compromises may be needed because all sensors must have a common orbit, and payload accommodations must account for possible optical (fields-of-view), mechanical (jitter), or electromagnetic sensor interference as well as the possible multiplexing of resources (data handling, power, etc.). Further, with a multisensor platform, a launch or satellite bus failure results in the loss of all sensors.
Clusters
When spatial or temporal simultaneity of measurements is required, flying several single-(or few) sensor spacecraft in formation as a cluster is an alternative to a larger multisensor platform. This addresses the requirements for simultaneity of measurements while still providing the programmatic flexibility associated with small spacecraft: For example, the cluster can be built up incrementally, and, in the case of failure or obsolescence, sensors can be replaced one (or a few) at a time.
Formation flying is feasible but has not been proven in operational use.4 The difficulty and cost associated with this approach depend on how stringent the requirements are for coalignment and simultaneity of measurements. In all cases, on-board propulsion systems are needed to maintain relative position within the cluster. Coalignment of sensors on separate platforms to better than a few tenths of a degree requires sophisticated spacecraft attitude control and/or sensor pointing systems. In addition, active control links between spacecraft are
needed for close control of formation spacing. A tight formation leads to data communication challenges, because it requires multiple ground antennas or relay links between satellites. Formations with widely spaced satellites allow individual satellite contacts to be accomplished with a single ground antenna (15-minute separation) and therefore are easier to manage at relatively modest cost. The GPS is an example of such a constellation. For Earth remote sensing, such a constellation may be spaced too far apart for adequate sensor data registration.
Constellations
For missions requiring global or continuous coverage, there is a potential advantage in deploying a constellation of spacecraft with similar sensor(s) in one or more orbits. In fact, there may be no alternative to this approach if global coverage must be provided in real time or within a very short interval. Systems such as the GPS or the newer mobile telephone systems need multiple orbits and satellites to provide the requisite coverage. Measurements of some Earth system processes may not require near-continuous coverage, and the number of orbits and satellites may be reduced at the expense of increased delays in data acquisition. Such constellation architectures are robust; they also increase flexibility in the overall observing program. The constellation can be built up incrementally using multiple or single satellite launches. If the constellation is composed of many satellites, the overall system is relatively insensitive to the failure of an individual satellite. Replacements can be made one at a time as they are needed. If there are few satellites in the constellation, or if it is critical that the data be collected all the time, then the constellation can include spare satellites on-orbit.
Depending on the mission, multisatellite constellations can involve complex communications links and/or ground operations. To date, constellations have been applied, or studied for application, in operational missions involving communications (Iridium, Globalstar, Odyssey, Teledesic); navigation (GPS); and surveillance (Space Missile Tracking System).
Constellations of small satellites may also offer a new approach to those science missions that would benefit from more frequent sampling by a larger number of lower cost (and presumably lower accuracy) sensors. Monitoring of time-varying phenomena such as cloud cover might be a good example of a mission where higher refresh rate at lower accuracy is a preferred approach.
The relatively high cost of fielding multisatellite systems may limit their potential for dedicated research missions even though the use of many identical spacecraft offers economies of scale in producing space segment hardware. Accommodating research sensors as additional payloads on operational satellite constellations could offer an effective approach to reducing cost.
COST-EFFECTIVENESS OF SMALL SATELLITE ARCHITECTURES
One of the key factors driving the strong current interest in small satellites is a desire to reduce mission costs, largely as a result of very severe budget pressures. When discussing small satellite mission costs, it is important to distinguish between small (low-cost) missions and larger missions that are performed with multiple small satellites. There is little question that valuable missions can be accomplished at relatively low cost with smaller payloads, satellites, and launch vehicles. This is the philosophy currently employed by the National Aeronautics and Space Administration in selecting missions for the Discovery, Small Explorer, Mid-size Explorer, and Earth Science System Pathfinder programs. In all of these programs, cost maximums are defined as a mission design requirement, and only those missions that can be performed under the caps are considered for selection. Because smaller systems are typically less costly than larger ones, this has led to a series of small satellite missions.
A different situation exists when a mission is defined in terms of the needed measurements or existing payloads, and the objective is to select the best system architecture to accomplish it. Cost is once again a key parameter, but here it is a criterion for comparing alternative architectures rather than a constraint on a mission's definition. Where it is scientifically appropriate, a key question in this context is thus whether it is cost-effective to split up a large multisensor payload onto multiple smaller satellites. Because alternative architectures involve varying numbers of spacecraft, launches, and ground station elements, the specific cost per pound to place, maintain, and operate a specified payload in orbit is the parameter of interest rather than the absolute cost of individual system elements.
As discussed in Chapter 4, a recent RAND study (Sarsfield, 1997) indicates that, on a specific cost (per unit mass) basis, small satellite development costs can be relatively high when they retain the complexity needed to achieve demanding scientific requirements (see Figure 4.1). Further, as shown in Chapter 5, launch costs per pound of payload (satellite) increase substantially for smaller launch vehicles. Consequently, the cost of delivering a given set of sensors to orbit will be greater on multiple small satellites than on a multisensor platform.5 It is also clear that operational costs will be higher for a larger number of satellites, including the costs for communications, command, and control, as well as data processing when registration correction is required. However, the cost of delivering sensors to orbit is only part of the total cost associated with a remote sensing program. A key issue—and one that can drive the architectural cost trade-off—is the cost of maintaining a particular remote sensing capability. This is discussed in the following section.
Maintenance
Maintenance can be a driving cost factor depending on the mission success criteria. For an operational mission (e.g., POES), the availability6 requirement usually means that loss of a key sensor requires launch of a replacement. However, the POES satellites are multisensor systems. Replacement of a key failed sensor on POES, or on the National Polar-orbiting Operational Environmental Satellite System (NPOESS), should its satellites also be multisensor systems, can result in a mix of fully operational multisensor satellites and residual operational assets from the failed satellite. These residual assets can be factored from the start into mission planning to minimize future replacement requirements, but at some cost in operational complexity (operating more spacecraft). Employing single-sensor satellites to replace failed sensors on multisensor platforms avoids creating residual assets but involves similar operational complexities—and, if sustained as a strategy, ultimately leads to a complete single-sensor platform architecture. A superior strategy might be one in which the decision to launch single-sensor or multisensor platforms to replace failed sensors is based on the depreciated value (i.e., expected remaining life) of the still operating sensors.
Scientific missions seldom have an availability requirement for a particular sensor(s), although some missions are deemed important enough that replacement occurs after a failure. Typically, loss of a sensor results in loss of the data stream (and not a higher mission cost to replace the sensor). No residual assets are created by replacement, and a multisensor platform continues to function as long as useful data are generated and operations are affordable.
Thus, the implications of a failure—and hence the trade-off between smaller and larger platforms—is quite different for the operational National Oceanic and Atmospheric Administration missions (e.g., POES, the Geostationary Operational Environmental Satellites [GOES], and, in the future, NPOESS) versus the research-oriented EOS program. This is illustrated in the analysis presented below of the cost-effectiveness of alternative mission architectures for NPOESS.
NPOESS
Both the Johns Hopkins University Applied Physics Laboratory (APL) and TRW have performed NPOESS architecture studies. At first glance, the studies appear to have arrived at opposite conclusions regarding the potential for cost reduction by accommodating the multiple NPOESS sensors on several small satellites versus a single larger one. However, further analysis showed that both results were consistent with the assumptions used and that the preferred architecture is highly dependent on those assumptions (Raney et al., 1995; Rasmussen and Tsugawa, 1997). A summary of the key reliability assumptions used for these studies is presented in Table 6.1.
Table 6.1 Reliability Assumptions Used in NPOESS Mission Architecture Studies
|
Mission Component |
Raney et al. (APL) |
Rasmussen and Tsugawa (TRW) |
|
Launch vehicle |
||
|
Large |
0.95 |
0.95 |
|
Medium |
0.95 |
0.90 |
|
Small |
0.95 |
0.90 |
|
Critical sensors |
0.80 at 3 years |
0.84 at 7 years |
|
Spacecraft bus |
0.96 at 3 years |
0.89 at 7 years |
To explore operational mission cost sensitivity to satellite size, Rasmussen and Tsugawa considered large, medium, and small satellite classes sized to the mass and volume constraints of the Delta, Lockheed-Martin Launch Vehicle-3 (LMLV-3), and Taurus launch vehicles. Three separate architectures were constructed using one large, three medium, and six small spacecraft in each of two orbit planes such that each architecture carried the same set of 10 sensors per orbit (4 critical, 6 noncritical) and had the same mission objectives. The primary mission objective was to achieve specified space segment availability for critical sensors over the life of the mission. Space segment and launch costs, as well as the ability to meet mission objectives, were used to judge the viability of each architecture. Results were obtained as a function of system parameters such as sensor and spacecraft reliability and design life, relative spacecraft costs, and the desired system availability.7
Figure 6.1 illustrates some key findings of this study . The figure shows the sensitivity of space segment mission (life cycle) costs to sensor reliability for a 10-year mission.8 Results are shown for the large, medium, and small satellite architectures where the individual recurring bus costs are realistically estimated to be in the ratio 1:1/2:1/4 and the average system availability requirement is >90 percent.
A key study finding was that small, medium, and large satellite architectures have different life cycle cost sensitivities to sensor reliability. As a result, the most cost-effective architecture is sometimes a small satellite architecture and sometimes a large satellite architecture. Large satellite architecture costs are more sensitive to sensor reliability because they carry more sensors, all of which are replenished when a new satellite is launched in response to any critical sensor failure. When sensor reliability is high and failure infrequent, the lower cost to deploy the payload with fewer, larger platforms outweighs the added costs of occasionally launching unnecessary sensors and provides a life cycle cost advantage to large satellite architectures. On the other hand, low sensor reliability, with concomitant frequent replacement, leads to excessive unnecessary sensor replacement with large platforms and favors small satellite architectures.
This behavior explains the disparate results between the APL and TRW studies. The APL study assumed low reliability, short-lived sensors typical of those flying on POES today. For this class of sensor, Figure 6.1 shows that the results favor the small satellite architecture. The TRW study assumed higher reliability and longer design life, reflecting the requirements being used to develop the next generation of operational sensors for NPOESS. These assumptions favor the larger, Delta class architecture and lead to substantially reduced mission costs.
Availability is another key parameter affecting mission costs for operational systems. Each system has a cost and average availability determined by the reliability and design lives assumed for the sensors and spacecraft bus,
|
7 |
This study did not include the ground segment in mission cost trade-offs. It is likely that ground segment costs increase with a larger number of satellites in orbit and that the trends in the study results, which show life cycle cost advantages for multisensor satellites, would be sustained and possibly amplified by including them. This should be verified with further study. |
|
8 |
Mission costs are presented as a ratio normalized to the large (Delta class) satellite architecture solution (with the Rasmussen and Tsugawa reliability assumptions of Table 6.1). Mission costs are similarly normalized with respect to the TRW Delta class architecture solution in Figures 6.2 and 6.3. |
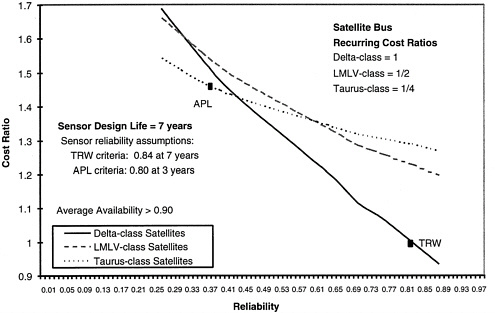
Figure 6.1
Relationship between mission cost and sensor reliability: operational mission model.
the launch vehicle reliability, and the assumptions made regarding replenishment criteria and launch schedule. For the current two-satellite POES system, new satellites are theoretically launched on demand, that is, within 120 days upon failure of a critical sensor or a spacecraft bus. Average availability of only 80 to 90 percent for two operational satellites can be achieved with this approach (during the time between failure and replacement, the data product is not available). To achieve higher average availability, new replacement satellites must be launched periodically—on a schedule—in addition to launching on demand to accommodate random failures. The sensitivity of mission life cycle cost to average availability for this scenario (using the Rasmussen and Tsugawa assumptions of Table 6.1) is shown in Figure 6.2 for the small, medium, and large satellite architectures studied.
For each architecture, relative cost versus mission average availability is plotted for scheduled replacement launches every 6, 5, 4, 3, and 2 years (in addition to launching in response to random failure). Average availability in the range of 94 to 97 percent is achieved with scheduled launches every 6 years. Achieving higher average availability by launching replacement satellites more frequently involves substantially higher costs. Clearly, mission requirements for very high availability should be scrutinized carefully.
Earlier, it was demonstrated that the cost to deliver a given set of sensors to orbit favored the use of multisensor satellites. Here we see that the cost versus availability results again favor larger satellite architectures because of the sensor and satellite bus reliability assumptions and fewer anticipated launch failures.
EOS
Nonoperational, Earth science missions that require multiple sensors on orbit such as EOS AM, PM, and Chemistry are also subject to trade-off studies regarding the number and size of satellites deployed and the parsing
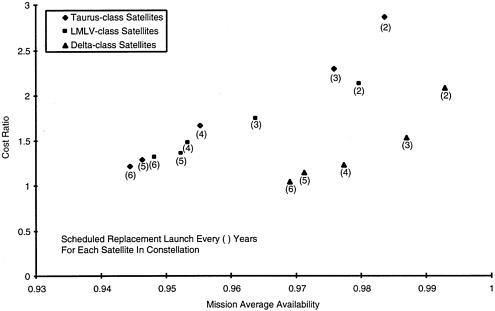
Figure 6.2
Mission cost sensitivity to average availability: operational mission model.
of sensors. As with operational missions, results depend on the assumptions used and the criteria for success. To gain insight into this class of missions, Rasmussen and Tsugawa (1997) studied a generic 5-year science mission in which four sensors are launched into one or more orbits on either one large, two medium, or four small satellites, again consistent with the launch capabilities of the Delta, LMLV-3, and Taurus vehicles. Typical of science missions, no replenishment launches were assumed regardless of failure of launch vehicle, spacecraft bus, or sensors.
These assumptions lead to a straightforward cost comparison based on the estimated costs to develop and launch the various satellites that make up the initial architectures. Figure 6.3 shows the relative mission costs, using the same element cost assumptions as the operational weather system (POES), and again normalized to the single, Delta class satellite case. Parsing a given complement of sensors among a larger number of independently launched satellites increases mission cost. A recent NASA study on alternative architectures for the EOS Chemistry-1 mission led to similar results.9
But costs alone do not define the preferred solution; they must be viewed in terms of the success criteria for the mission. For a science program, a reasonable criterion for success might be related to the number of sensors still operating at the end of the mission. The probability of launching and sustaining a completely operational system (four working sensors) as a function of time over the 5-year mission life is shown in Figure 6.4. Multisatellite architectures are clearly penalized by the greater probability of at least one launch vehicle failure as reflected in the initial points for each curve.
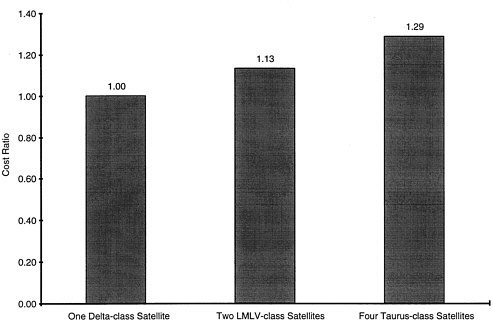
Figure 6.3
Relative mission architecture costs: science mission model.
The analysis above changes, however, if limited failures are permitted within the context of a successful mission. The probability of completing the 5-year mission with a specific number of failures is shown in Figure 6.5 for each architecture. If mission success requires that at least three of the four sensors be operational over the full 5 years, then the single Delta class satellite is the most effective architecture in terms of having the highest probability of success. If only one or two surviving sensors (three or two failures) can still be considered a success, then the medium and small satellite architectures are more effective solutions. The highest probability case occurs when only one of four single-sensor small satellites needs to survive the launch and 5 years of operation for the mission to be considered successful. Thus, the optimal architecture for scientific multisensor missions is dependent on the success criteria established. The explicit requirements must be examined in order to select the correct system architecture to perform a mission in the most cost-effective manner at an acceptable level of risk.
Finally, it should be recognized that the preceding analysis has not considered such qualitative factors as the ''time to science"; that is, the time it takes to develop a mission and deliver scientifically useful data. For some missions, particularly those that are research-oriented, the potential to answer pressing scientific questions more rapidly may override other considerations in justifying a faster, more flexible small satellite solution.
SUMMARY
Small satellites—in particular single-sensor platforms—provide great architectural and programmatic flexibility. They offer attractive features with respect to satellite design (distribution of functions between sensor and bus); observing strategy (tailored orbits, clusters, constellations); time to science for new sensors; replenishment of individual failed sensors; and robustness with regard to budget and schedule uncertainties. On the other hand,
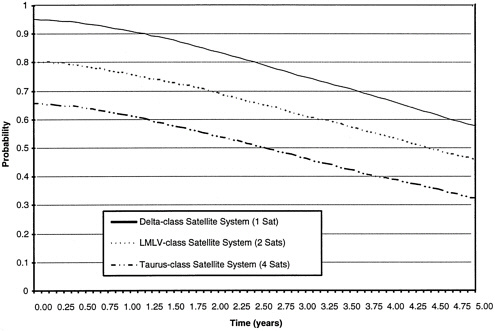
Figure 6.4
Probability of operation with no failures versus time: science mission model.
spatial and temporal simultaneity of measurements are easiest to achieve with multisensor platforms. And, because fewer launches are involved, multisensor platforms offer a higher probability of placing a given complement of sensors into orbit without loss. They also frequently offer the simplest ground segment solutions, including mission operations, downlink and data system architectures, and calibration and validation of sensors. Clusters or constellations of small satellites may require additional ground station elements or spacecraft data crosslinks, in addition to more challenging mission operations planning, to accommodate increased communication, command, and control requirements.
Cost trade-offs for single-versus multisensor platforms and for single-versus multisatellite architectures are driven by the costs, reliabilities, and design lives of the system elements (sensors, spacecraft buses, launch vehicles, ground segments) and by availability requirements for operational systems. The following observations generally hold true:
-
The lowest cost to place a given set of sensors into orbit will often be with the smallest suitable multisensor platform.
-
The lowest cost architecture to maintain a set of operational sensors in orbit for a sustained mission life is mission specific and must be determined on a case-by-case basis.
-
Small satellites may provide economic benefits as part of a replacement strategy for failed sensors or for sensors with limited design life or reliability.
Differences in success criteria between research and operational missions affect mission architecture trade-offs. Life cycle costs and availability requirements drive decisions regarding the configuration of operational
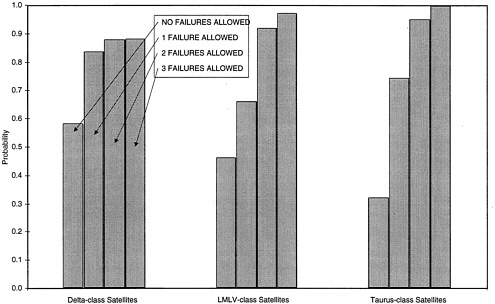
Figure 6.5
Probability of mission success defined in terms of a specific number of failures: science mission model.
missions, whereas the urgency with which data are needed (time to science), tolerance to partial failure, and programmatic flexibility are factors that may override cost considerations in certain research missions.
REFERENCES
Earth Observing System Project Office (EOS). 1996. Report of the EOS Payload Panel on the GSFC CHEM-1 study. The Earth Observer 8(3). Available online at <http://eospso.gsfc.nasa.gov/eos_observ/5_6_96/p15.html>.
Earth Orbiter-1 (EO-1). 1999. Available online at <http://fdd.gsfc.nasa.gov/missions/eo-1.html>.
FLORIDA TODAY Space Online. 1999. Available online at <http://www.flatoday.com/space/>.
Raney, R.K., G.H. Fountain, E.J. Hoffman, P.F. Bythrow, and R.H. Maurer. 1995. Small Satellites and NOAA: A Technology Study. The Johns Hopkins University Applied Physics Laboratory, American Institute of Aeronautics and Astronautics/Utah State University Conference on Small Satellites, Utah State University, Logan.
Rasmussen, A., and R. Tsugawa. 1997. Cost Effective Applications of Constellation Architectures of Large, Medium and Small Satellites. AIAA Paper 97-3950. Reston, Va.: American Institute of Aeronautics and Astronautics.
Sarsfield, L. 1997. The Cosmos on a Shoe String: Small Spacecraft for Space and Earth Science. MR-864-OSTP. Santa Monica, Calif.: RAND, Critical Technologies Institute.









