
7
Control Technologies
Beyond the differences in materials, structures, propulsion, and aerodynamic design, the single fundamental feature that most distinguishes UAVs from other aerial vehicles is control. UAVs rely more heavily on autonomous internal machine and remote links to humans than other systems. The utility, effectiveness, and acceptance of UAVs will depend on the exploitation of the capabilities, and recognition of the limitations, of control technologies.
The word control is used here to cover the entire gamut of automation, from inner-loop feedback servos to dynamic alterations of mission strategies in response to near-real-time surveillance of the consequences of past strategic actions. The committee envisions that UAVs will operate in integrated scenarios (Figure 7-1) involving several vehicles with specified missions to be accomplished by the collective; with communication links among vehicles and between vehicles and with remote human-operated control sites (perhaps in the local area, perhaps continents away); and with onboard and off-board sensing, actuation, and information processing capabilities to conduct vehicle and payload operations with a high degree of autonomy.
These integrated scenarios are not futuristic. Similar scenarios are used today in various applications at different levels of sophistication. However, automating real engineering systems in the absence of strong supporting scientific knowledge often creates problems. The challenge is to increase this knowledge so that designing complex autonomous systems becomes routine—that is, the integrated designs will be capable, reliable, trustworthy, and affordable.
Although research and development will be necessary for all of the elements illustrated in Figure 7-1, this report focuses on the four areas that present the most compelling case for USAF-supported basic research:
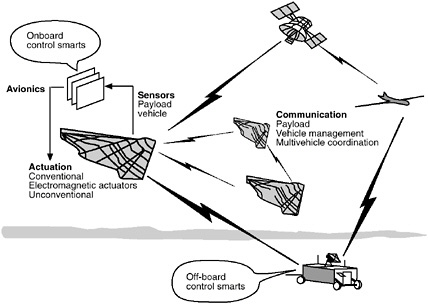
FIGURE 7-1 Integrated UAV control scenario.
-
built-in intelligence, or control “smarts,” designed into system architectures and into onboard and off-board processing elements
-
the allocation of tasks and construction of interfaces between humans and capable machines
-
the capacity, security, and robustness built into communications links
-
specialty sensors and actuators, especially MEMS devices, to support some of the unconventional aerodynamics described in Chapter 3
Although other elements in Figure 7-1 are also critically important to the overall UAV system, the committee believes less compelling cases can be made for USAF basic research in these areas. For example, the development of onboard and off-board hardware and software technologies for information processing, storage, and display is being driven by the commercial marketplace, and USAF investments will generally have only a small effect. Similarly, conventional actuators, such as hydraulic actuators and EMAs, require more support for engineering development and manufacture than for basic research. Finally, the payload requirements are very specific to the devices in question (e.g., radar, electrooptical and infrared sensors, communication repeaters, and weapons), and research support for them would be more appropriately provided by the relevant scientific and engineering subspecialties.
The subsections briefly describe the committee’s findings regarding current capabilities, identify basic research needs, and recommend specific research by the USAF.
BUILT-IN INTELLIGENCE OR CONTROL “SMARTS”
In considering technology related to built-in intelligence, the committee benefited from the groundwork laid at an AFOSR-sponsored Workshop on Research Needs in Dynamics and Control for UAVs held in August 1997 at the University of California-Los Angeles. The discussions, findings, and recommendations that follow are based on the results of that workshop.
The discussions at the AFOSR workshop were structured around a well defined functional hierarchy of vehicle control systems (illustrated in Figure 7-2). This hierarchy is used in manned vehicles today and is expected to remain essentially the same for UAVs and UAV systems well into the future. Hence, it can be considered a “fixed point” around which current capabilities and their evolution can be described.
The hierarchy in Figure 7-2 includes three layers of control for collections of vehicles. The first and lowest layer consists of each vehicle’s inner-loop flight control functions; the second consists of each vehicle’s vehicle-management functions; the third and highest layer consists of the mission-management function, which bridges the entire collection of vehicles. In the UAV systems envisioned today, the inner-loop and vehicle-management layers are typically implemented onboard each vehicle, and the mission-management layer, in whole or in part, is implemented off board.
A sublayer of the inner loop might be called local control. On conventional aircraft, this sublayer includes engine controls and actuator servos—tight local regulation of specific aircraft components. For future UAVs, local control would also include the local loops associated with flow control, drag reduction, and other aerodynamic manipulations (described in Chapter 3).
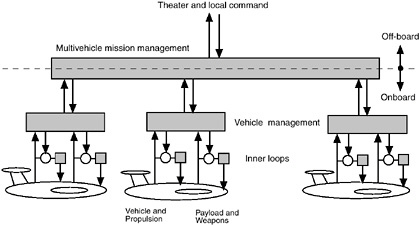
FIGURE 7-2 Functional hierarchy of vehicle control systems.
Inner-Loop Layer
Among the three major layers of the hierarchy, automatic control is most firmly established in the inner-loop layer. The basic function of the inner loop is to ensure vehicle stability and to establish and maintain desired flight parameters or execute specific flight phases, as commanded by the vehicle-management layer. Common control modes include following acceleration/rate command, maintaining altitude/speed/heading, automatic take-off/landing, flight to waypoints, and tracking trajectory. Automated systems routinely execute each of these functions on aircraft today, and the same functions must be accomplished by automation and/or remote control in UAVs.
Although the state of the art of control design for the various inner-loop modes is well advanced, the design of control systems for UAVs involves different design rules and is generally more difficult than for conventional aircraft. The current state of the art includes the basic techniques of robust multivariable control theory for linear systems combined with gain-scheduling and optimization, feedback linearization/dynamic inversion for nonlinear systems with invertible nonlinearities, and various special approaches (e.g., nonlinear filters, antiwindup, and bumpless transfer logic) for other cases. Although these techniques can be applied to the inner loops of UAVs, the very nature of UAVs changes the design problem. The absence of onboard manual controls eliminates the requirements related to quality of handling and pilot comfort that are enshrined in current military flight-control specifications. Instead, control systems can be focused solely on meeting mission needs within vehicle constraints. In addition, UAVs will be operated more aggressively than their manned counterparts, closer to authority limits of actuation and closer to the physical limits of airframes that will often be deliberately lightweight and flexible. Finally, the drive for affordability and short design cycles that underlies much of the interest in UAVs will call for changes in today’s design practice, forcing increased use of automation in modeling, simulation, control law design, implementation on integrated digital hardware, verification, and testing. Increased reusability will also be important.
Recommendation. In light of the special factors driving the design of UAVs, the U.S. Air Force should strengthen its support for basic research programs addressing the rapid (automated) design and implementation of high-performance control laws. Areas of interest include basic theory for nonlinear and adaptive control, reusable control law structures and processes capable of full-envelope design, software tools for automated control design and analysis, automated code generation from high-level design tools, and simulation models with sufficient fidelity for affordable tests and verifications.
Vehicle-Management Layer
The function of the vehicle-management layer of the hierarchy is to manage onboard vehicle operations and to carry out commands from the mission manager. This includes managing the vehicle’s mission time line (i.e., commanding all flight phases to the inner loops in proper sequence—from power-up through taxi, takeoff, ingress, mission phase flight, egress, landing, and return-to-the-ground support facility); establishing proper operating modes, component configurations, and resources (e.g., aero configuration, gear, sensors, actuators, fuel, and center of gravity) for each mission segment; monitoring vehicle health; and handling contingencies (e.g., changes in onboard status, mission parameters, and environmental conditions).
Although some automatic controls are used today to carry out vehicle-management functions, control methods are based largely on engineering heuristics and not on basic supporting scientific knowledge. The current design practice is to examine nominal operations and their contingencies in detail, determine appropriate vehicle-manager actions, and then program those actions as “if-then-else” rules in vehicle-management computers. Computer science techniques (e.g., expert systems, formal logic, and verification proofs) are used to improve the programming aspects of this process, but the initial specifications for each vehicle-manager action is still the responsibility of “domain experts.”
The committee endorses the conclusion of the 1997 AFOSR workshop that research is needed to
…devise ways to formalize the generation of actions on the basis of underlying continuous dynamics of vehicles (synthesis), and also to devise ways to verify these actions such that all contingencies are covered and no undesired properties appear in any possible combinations of states (analysis). As in standard control theory, analysis improvements will probably precede synthesis. Examples of efforts to formalize these design steps can be found in the work on intelligent vehicle highway systems (Stein et al., 1997).
Recommendation. The U.S. Air Force should pursue basic research to provide scientific support for robust vehicle-management functionality.
Mission-Management Layer
The function of the mission-management layer, the highest layer of the control hierarchy, is to plan, rehearse, and execute missions assigned to collections of vehicles. This includes time lines for vehicle ground preparations, ingress trajectories, on-station operations (e.g., trajectories and attack patterns), evasion tactics, response to attrition, deconfliction, replanning, egress trajectories, and the evaluation of mission performance.
Mission management encompasses a very challenging set of functions, and science today provides little formal knowledge to help with the design of
automated mission-management systems. In current practice, war-fighters and planners carry out most mission-management tasks, relying on the results of past engagements, exercises, training, and well practiced tactics and maneuvers, all informed by established doctrine. Their work is partly manual and partly aided by workstation-based planning tools to expedite data access and visualization and to help iterate and optimize specific tasks.
This situation (i.e., mission management based more on human insight and experience than on scientific principles) is unlikely to undergo a revolution in the next two decades. Nevertheless, the USAF can encourage evolutionary advances in the state of the art by supporting basic research in human-machine science (discussed in Chapter 2) and supporting the development of specific capabilities that will make current design tools and planning aids much more powerful.
Real-time path planning and optimization should be a core competency of organizations that design and manufacture controls that apply to the mission management layer of the UAV control hierarchy.
Issues that need to be addressed include effects of vehicle attitude and trajectory on radar cross section and susceptibility to jamming, constraints on trajectory due to vehicle dynamics, stationary threats (e.g., fixed radars and jammers), variable numbers of dynamic threats (e.g., mobile radars and jammers), collision avoidance, vehicle and threat modeling, and computational requirements (Stein et al., 1997).
Control of dynamic networks offers a formal way of addressing a key application of some types of UAVs—that they will often be used in coordinated clusters rather than as independent platforms.
… this scenario can be described as a dynamic network where each node is a UAV. A dynamic network is characterized by a spatially distributed set of dynamic nodes which are coordinated (or integrated) by the mission objectives and possible dynamic coupling between the nodes. The mission objectives are to be obtained in the presence of large uncertainties due largely to a hostile environment. Within this context, nodes may fail at various levels, measurements may be highly corrupted and communication channels may be severely limited due to jamming. Communication links are further challenged due to power constraints and spatial dispersion producing tradeoffs between noisy information, latency, and bandwidth constraints. For this class of problems current mathematical paradigms break down and focused research is required for new paradigms (Stein et al., 1997).
Recommendation. The U.S. Air Force should enhance the capabilities of available design tools and planning aids by supporting ongoing efforts related to realtime path planning and optimization algorithms, and by embarking on a program of basic research in control of dynamic networks.
Management of Uncertainty
Driven by the prime motivators of risk avoidance and cost reduction, UAVs
will make increasing use of modeling and simulation to shorten design and production cycles and to reduce operating costs. Expressed in current jargon, UAVs will increasingly rely on virtual engineering, a process in which prototyping, evaluation, and testing are done with simulated versions of objects instead of real-world (hardware) versions. Although virtual engineering has the potential to reduce cost and cycle times substantially, it also raises serious concerns about the fidelity of models and their inherent uncertainties. This concern is illustrated schematically in Figure 7-3. Figure 7-3(a) shows a traditional design sequence involving tight iterations of testing and redesign. Like any well designed, highgain feedback loop, these iterations allow the modeling, design, and build steps of the sequence to be relatively imprecise because the testing and evaluation step with real-world objects will provide corrections. However, to obtain a satisfactory product, the sequence must be cycled repeatedly, which consumes time and resources and greatly increases the incentive for performing the same sequence in a virtual (simulated) environment.
The process illustrated in Figure 7-3(b) will only be successful if reducing the virtual error, which the virtual design loop will surely do, also reduces the real error. Unfortunately, many sources of real error, from the intrinsic variability of the real world being modeled to the multitude of assumptions and approximations introduced in the modeling and simulation steps, cannot currently be accounted for formally and explicitly (so-called uncertainty management).
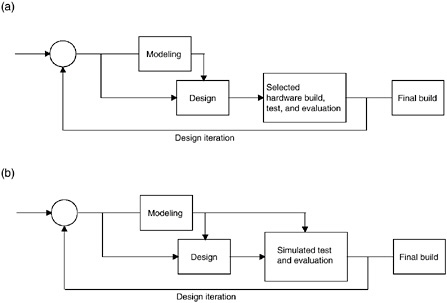
FIGURE 7-3 Comparison of (a) traditional engineering design process with (b) virtual engineering design process.
… a critical need in the new virtual paradigm is for systematic and explicit methods to represent and propagate uncertainty throughout the modeling and design steps. This is a major challenge to achieve fully, but there are many incremental gains along the way that will help to avoid major failures or disasters and to ensure the acceptance of the real paradigm shift needed. Research issues include (1) propagating uncertainty in models from component materials and geometry through system performance/cost/risk, (2) designing complex systems to operate in the presence of significant uncertainties in the environment as well as uncertainties in system components (using concepts such as averaging, protocols, and feedback), and (3) using model-based assessments of sensitivities to augment virtual prototyping with selected physical prototyping of components whose uncertainty descriptions are most critical (Stein et al., 1997).
Recommendation. Motivated by the urgent need for a better understanding of the role of uncertainty in virtual engineering, the U.S. Air Force should establish a basic research program in uncertainty management.
SENSORS AND ACTUATORS
Sensors and actuators are essential for aircraft operation. Global positioning system (GPS) receivers and/or gyroscopes are often used for guidance, and sensors for speed, roll, pitch, and yaw are used to control aircraft motion. Control surfaces provide aerodynamic forces and moments for aircraft maneuvering. Actuators are commonly used for moving control surfaces or for engine controls. Surveillance information can be gathered by radar, cameras, or various other sensors.
Minimizing weight and volume are important aircraft design criteria for sensors, actuators, and other subsystems. Weight and volume constraints are even more stringent for UAVs because of their size and payload limitations. Emerging MEMS technology can provide transducers as small as tens to hundreds of microns (NRC, 1997c). The weight and volume of MEMS transducers are practically negligible when compared with traditional devices. In addition, integrating microtransducers with complementary metal oxide semiconductor (CMOS) electronic circuitry to create an integrated system capable of sensing, analyzing, and actuating would be cost effective. This capability would enable many innovative uses for MEMS-based transducers, including many uses relevant to future military UAVs. For example, by applying a distributed transducer network to structural controls to enable strength-on-demand operations, a considerable reduction in structural weight would become feasible (Chase et al., 1997). Using MEMS transducers to manipulate the aerodynamic forces and moments could also have a great impact on the aerodynamic performance of UAVs (see Chapter 3). Potential flow control techniques include separation control and riblets for drag reduction.
In addition to satisfying payload limitations, UAV-specific transducers would enable remote operators and onboard autonomous systems to maintain situational awareness. For example, a collision-avoidance sensor will be essential for small
UAVs traveling around trees and buildings. In addition, UAV-compatible biological, chemical, and nuclear sensors could expand UAV operations to non-traditional missions that would be too hazardous for piloted aircraft.
MEMS-based sensors have several unique characteristics:
-
very small size
-
ability to distribute a large number of sensors into an array
-
ability to integrate directly with integrated circuits
These characteristics can lead to new dimensions in the performance of sensors with aircraft applications.
Inertial Sensors
MEMS-based accelerometers are already well developed. A single sensor can provide a dynamic range of 84 dB. With an array of sensors, each covering a different range, the total dynamic range can be extended for a wide spectrum of applications. It is already possible to integrate three-axis accelerometers with onchip analog-to-digital conversion and sensitivity enhancement circuits (Allen et al., 1998). However, research is still needed to develop microgyros suitable for UAV navigation. In the very near future, the drift rate of microgyros will be reduced to about 1 degree per hour, but this is still far greater than navigational requirements for UAVs.
Aerodynamic Sensors
During the development stage, UAVs will require various flow sensors to support wind-tunnel tests. Microsensors could be used extensively on small windtunnel models to replace traditional sensors, which are extremely expensive.
A full line of micro-flow sensors for measuring pressure, shear stress, temperature, and heat flux has already been developed (Ho and Tai, 1998), and some have been flight tested. Additional research is needed to develop packaging and interconnecting techniques for flight applications.
Structural Sensors
Micro-strain gages were one of the first kinds of microsensors developed for structural applications. Arrays with a large number of micro-strain gages can be made easily. For health monitoring, these microsensors would be distributed around the whole aircraft; the signal path would also have to cover the whole aircraft. A low-cost packaging technique to distribute microsensors on a macro scale is the remaining outstanding challenge.
Surveillance Sensors
Current biological and chemical sensors are bulky and heavy and require experienced technicians to operate them. Several MEMS-based biological and chemical warfare sensors under development that could be packaged in a container the size of a shoe box could automate the detection process.
Infrared cameras are widely used for surveillance, but liquid gas coolers, which are required for conventional cameras, impose a significant operational burden. A MEMS-based infrared camera would not require a low-temperature operating environment and would greatly expand the surveillance capabilities of UAVs.
Actuators
UAVs could use MEMS-based actuators for steering fiber optics and for signal switching of onboard electronics. Systems to control flow separation will require actuators with displacements on the order of millimeters and actuation forces on the order of milli-Newtons. Three types of force are available for actuation: electrostatic, electromagnetic, and thermal-pneumatic forces. EMAs can provide the forces required for UAVs. Electrostatic forces usually are an order of magnitude too low. Thermal-pneumatic actuators offer the highest force level, but packaging is more involved, and the frequency response is low.
A much greater force will be necessary for structural control. Possible candidates for these actuators include thin piezoelectric actuators, magnetostrictive alloys, and shape-memory alloys. The typical displacement of current actuators using these technologies (typically in the micron range) is too low for use in UAVs. In addition, thin-film processing technology requires further development to make thin piezoelectric actuators a practical alternative. Versatile thin-film, smart material-processing technologies compatible with microtransducer fabrication techniques would significantly reduce packaging costs. Research is needed to overcome the limitations of current technology and satisfy the demand for miniature actuators.
Recommendation. The U.S. Air Force should monitor developments in microelectromechanical system (MEMS) and undertake research to develop and apply a new generation of MEMS sensors and actuators.










