
3
Aerodynamics
In many ways, the aerodynamic issues important to UAVs are similar to those for manned aircraft. However, certain classes of UAVs operate quite differently from manned aircraft and present different aerodynamic design problems.
In most cases the particular demands on UAVs are reflected in changes in the relative importance of aerodynamic performance parameters. Sometimes these differences can lead to novel UAV configurations. Some technologies that have little payoff for commercial aircraft (e.g., lift augmentation in unsteady maneuvers) can be crucial for certain UAVs.
Aerodynamic development for UAVs relies strongly on linearized aerodynamics, especially for aeroelasticity and control. The presence of mixed laminar and turbulent flows, the importance of transition, the appearance of significant aeroelastic effects, and in some cases the presence of vortex-dominated flow fields make it difficult to conduct complete vehicle aerodynamic studies using available computational tools. The low Reynolds numbers of many UAVs makes the use of wind tunnel models very attractive, and most UAV development involves the creation of substantial experimental databases for performance and control studies. However, very few facilities are suitable for dynamic testing of very maneuverable UAVs (such as UCAVs and HSM vehicles).
Several aspects of UAV aerodynamics, from configuration design to aerodynamic modeling for stability and control, require more development. The rest of this chapter describes some of the basic aerodynamics-related research areas and promising technologies associated with the three notional vehicle types. Aeroelastic controls, propulsion/airframe integration, and improved multidisciplinary design approaches, which are critical to UAV development, cut accross traditional disciplinary boundaries.
BASIC RESEARCH
Each class of UAVs is driven by aerodynamic considerations that are either unique or very important for the future development of UAVs. This section describes some of these issues.
High-Altitude, Long-Endurance UAVs
HALE UAVs developed in the past 30 years represent a wide range of flow conditions. From the low-speed Predator (Ernst, 1996) and Condor (Johnstone and Arntz, 1990) to Global Hawk (Heber, 1996) and Darkstar (Berman, 1997), these aircraft share several aerodynamic challenges, but also illustrate the differences among UAVs in this class. This section deals with some of the common aerodynamic challenges.
Induced Drag
Although HALE UAVs may be required to operate at speeds higher than those for maximum aerodynamic efficiency for reasons of cost or mission effectiveness, the requirement for long endurance leads to lower speed operation, with a subsequent increase in vortex drag. Low-speed, high-altitude operations could also require that dynamic pressure be less than ideal. The standard approach to reducing induced drag is to increase wingspan (e.g., the wingspan of the 26,000-pound, jet-powered Global Hawk is 116 feet, the propeller-driven Boeing Condor of the 1980s 210 feet, and the solar-powered AeroVironment Centurion 240 feet). Large span, high-aspect-ratio wings pose difficulties, ranging from storage and transport to aeroelastic control, in addition to the performance penalties associated with the high unit-weights of the wings. Vortex drag can also be reduced by nonplanar lifting systems, including winglets, joined wings, C-wings, and other geometries (Kroo et al., 1996). Although these configurations reduce induced drag, their overall advantages over larger-span planar wings are small and mission specific. More radical approaches to drag reduction, such as tip turbines, may be more practical for UAVs than for commercial aircraft, but the potential for savings is uncertain at best.
Boundary-Layer Issues
Boundary-layer characteristics are among the most important issues for future UAV research and development. These issues are related to low Reynolds number, predicting and modifying boundary-layer transition, boundary-layer sensing and control, and airfoil section design.
Because HALE UAVs have high-aspect-ratio wings and fly in low-density conditions, often at low speeds, airflow is characterized by low Reynolds numbers (see Figure 3-1). Typical Reynolds numbers for the wings of HALE UAVs are
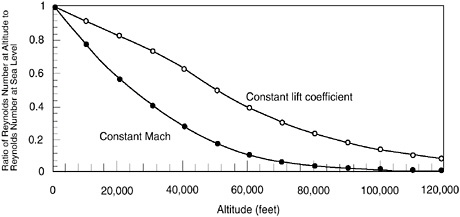
FIGURE 3-1 Variation of Reynolds number with altitude.
closer to those of sailplanes than commercial jets or fighters. This leads to challenges (e.g., attaining high lift coefficient and avoiding laminar separation) as well as opportunities (e.g., extensive laminar flow) in a flow domain that has not been studied thoroughly (Figure 3-2). A basic understanding of laminar-to-turbulent transition is promising for research critical to high-performance aircraft with lift-to-drag ratios approaching 40. Current Reynolds-averaged Navier-Stokes
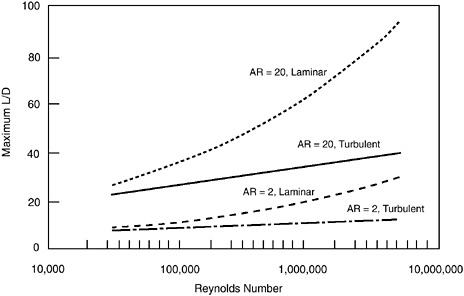
FIGURE 3-2 Maximum lift-to-drag ratio vs. Reynolds number showing influence of aspect ratio (AR) and laminar flow. Lift coefficient (CL) is limited to 1.0, parasite drag coefficient (CDp) = 1.5 coefficient of skin friction (Cf).
simulations with modern turbulence models cannot predict transition and do a poor job of modeling the combined laminar and turbulent flows, even when the transition location is known. The effect of surface roughness caused by rain or bugs is not well modeled in this Reynolds number regime, and heuristic methods are generally used in design. Even for smooth surfaces, transition predictions (including Tollmein-Schlichting, cross-flow, and attachment line instabilities) on swept wings in compressible flow are difficult to make. The behavior of laminar separation bubbles can also be important, especially in off-design conditions, and substantial work remains to be done to understand this phenomenon before it can be considered in design (O’Meara and Mueller, 1986). In addition to understanding and predicting boundary-layer phenomena, technologies for the design of efficient wings in this flight regime are required. Design approaches, including the incorporation of active boundary-layer sensing and control, are discussed in the section below on promising technologies for UAV aerodynamics.
Very High Altitude UAVs
Aerodynamic design issues become even more significant for UAVs designed to operate at extremely high altitudes. Much lower Reynolds numbers may dictate substantial departures from traditional design philosophies and may benefit more from both active and passive techniques for boundary-layer manipulation. Low-speed HALE UAVs that incorporate large propellers for efficient propulsion introduce several additional aerodynamic issues, including those associated with interactions between propeller and control on aircraft with high Mach and low Reynolds numbers.
Higher Speed HALE UAVs
The requirements for surveying large areas could also be met by higher speed UAVs, which could cover the same area as long endurance UAVs in a much shorter time. For certain types of vehicles, survivability considerations could dictate operation at very high altitudes and high speeds. Higher speed UAVs, including supersonic designs, that can gather data efficiently is an intriguing area for future research (Tracy et al., 1999).
Aeroelasticity and Controls
Wing flexibility resulting from the requirement for high aspect ratio and low structural weight fraction could cause aeroelastic instability for long endurance UAVs. These very flexible vehicles could use stability augmentation systems to combat aeroelastic instability. These aircraft may also feature unconventional configurations, such as flying wings or low-observable designs, and often exhibit significant nonlinear aerodynamic characteristics. Although dynamic aeroelasticity
is not a new field, the requirements for aeroelastic control will be difficult to meet with current analysis and design approaches (Weisshaar et al., 1998).
High-Speed, Maneuverable UAVs
HSM vehicles raise an unconventional aerodynamic design problem. Configurations are based on considerations of radar cross section, efficient propulsion integration, requirements for a wide range of speeds, and maneuvering capability. Configurations vary widely, but many involve the following aerodynamics-related design challenges.
Nonlinear Unsteady Aerodynamics
With significant maneuvering requirements, the dimensionless pitch rate can become large.1 This suggests that unsteady aerodynamics may play a greater role in the performance of HSM UAVs than in the performance of conventional aircraft and might be exploited to improve vehicle capabilities (Lang, 1998). However, the three-dimensional unsteady aerodynamics of this type of vehicle (i.e., vehicles with high sweep, low aspect ratio, and transonic Mach number) at high angle of attack are very poorly understood. Even the prediction of steady-state characteristics for vehicles that rely on nonlinear vortex lift is difficult, especially at critical conditions such as vortex burst (Ashley et al., 1991). New experiments and computational methods to study and predict three-dimensional separated flows or vortex-dominated flows are needed before such flows can be effectively controlled.
Unique Configurations and Control Concepts
HSM mission requirements lead to a wide range of design possibilities, including many that are not feasible for manned aircraft. Meeting the demands for high maneuverability and low observability can lead to unconventional arrangements that may involve flight in nonlinear regimes that would normally be avoided by conventional aircraft. Although specific aerodynamic features are likely to depend on the configuration, good simulations of complete vehicle flows, including vortex shedding and separation, will be important.
Propulsion-Airframe Integration
HSM UAVs will probably require highly integrated designs, which will require better modeling of inlet and exhaust flows over a wide operating range.
The effects of boundary-layer ingestion on inlet performance and distortion are difficult to model and are even more difficult to incorporate into the initial vehicle design. Size reduction and observability requirements have led to the use of serpentine inlets for advanced fighters, creating large adverse internal pressure gradients, increased distortion, and risk of separation. Preliminary results suggest that passive or active flow-control measures could be used to reduce these problems (Anderson and Miller, 1999).
Small UAVs
The design of small UAVs is dominated by problems associated with very low Reynolds number flows. From poor lift-to-drag ratios to low values for the maximum lift coefficient and related control problems, the design of efficient, small vehicles represents a significant aerodynamic challenge. Fundamental research may not be necessary to develop a 10 to 15 centimeter MAV (micro air vehicle) that can fly successfully (McMichael and Francis, 1998). However, smaller vehicles may employ fully laminar sections or, like insects, may require the use of novel unsteady aerodynamic mechanisms to generate sufficient lift for efficient flight.
Other Concepts
Some potential UAV applications fall outside the three classes of UAVs described above. Novel aerodynamic problems are likely to arise in the development of UAVs with vertical takeoff and landing (VTOL) capabilities, ultra-long endurance, supersonic or hypersonic speeds, or lighter-than-air structures. The resulting aerodynamic problems are difficult to anticipate, although research on analysis and design capabilities for complex, nonlinear flows over complete configurations would greatly accelerate the development of these devices.
PROMISING TECHNOLOGIES
This section suggests specific aerodynamics-related technologies and the associated research areas that appear to be promising for the development of UAVs.
High-Altitude, Long-Endurance UAVs
Section Design Concepts
Many current HALE UAVs employ airfoils based on sailplane sections that have been modified for higher Mach number requirements. New sections based on multipoint optimization may improve performance at the high lift coefficient,
transonic, low Reynolds number conditions of interest here (Selig and Giglielmo, 1994). The direct integration of vehicle trim and off-design performance constraints should be incorporated into a design approach that recognizes the important role of section geometry in drag, structures, and control. Innovative section concepts include very high lift sections; divergent trailing edge concepts (Henne and Gregg, 1989); continuous-mold-line, variable-camber sections; and slotted sections.
Multidisciplinary Design
Although some UAVs, such as Global Hawk and Condor, use rather conventional configuration concepts, future HALE UAVs may have very unconventional configurations, including tailless designs, varying degrees of sweep, joined wings, multiple body concepts, oblique wings, formations of cooperating aircraft, and others. Unique aerodynamic issues are associated with each of these concepts (e.g., swept-wing transition at low Reynolds number), and aerodynamics research must be conducted in the context of system configuration to identify the most important topics. Highly integrated design concepts, such as very flexible spanloaded vehicles, aircraft with distributed propulsion systems, or integrated payloads, require high-fidelity multidisciplinary analyses early in the design cycle (Wakayama et al., 1996). Figure 3-3 illustrates two unconventional configuration concepts.
Boundary-Layer Sensing and Control
Boundary-layer sensing can be useful for HALE UAVs for determining transition location and adjusting control gains, mission planning, or wing geometry based on the inferred vehicle state. Passive techniques for boundary-layer modification (such as riblets for reducing turbulent skin friction or vortex generators for boundary-layer modification) have been used with some success (Bechert and Bartenwefer, 1989). In some cases, unsteady flow perturbations and even active feedback control can be used to modify boundary layers or free shear layers (Ho and Huerre, 1984). These include synthetic jets for fluidic thrust vectoring or enhanced mixing (Smith and Glezer, 1998), and piezoelectric systems for separation control (Seifert et al., 1998).
Modification of transition location and redesign of sections for extended laminar flow with more aggressive pressure recoveries is possible with boundary-layer suction, although the cost of such systems (in terms of weight, power, and manufacturing) makes their application to HALE aircraft less compelling. Emerging MEMS technology makes micron-scale sensors and actuators possible (see Chapter 7). A variety of very lightweight microflow sensors (e.g., sensors for shear stress, pressure, velocity, temperature, and heat flux) and many microactuators have been designed and fabricated. MEMS transducers may provide a
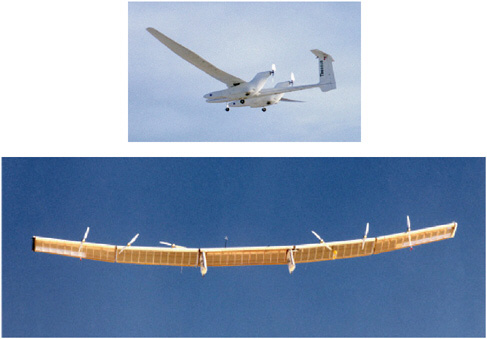
FIGURE 3-3 Unconventional designs with challenging configuration aerodynamics. Top: Aurora Flight Science Corporation’s Theseus. Bottom: AeroVironment Pathfinder.
Source: NASA.
means for much more efficient flow control by applying actuation at the place and time that is most effective. Separation control to enhance maximum lift could improve the loiter performance of HALE vehicles, and modifying the pressure distribution with miniature actuators could extend the region of extensive laminar flow.
Aeroelastics
The construction application of aeroelasticity to improve performance has been studied for many years, but it has seen little application. Aeroelasticity is generally regarded as a problem that should be avoided, especially with HALE UAVs. Research on active aeroelastic wings (Zillmer, 1997), however, looks promising and could be feasible for this class of UAVs. Current research on very flexible wings may lead to interesting design possibilities, although the practical advantages in this domain will have to be quantified.
Radical Concepts
Many new technologies that could dramatically improve aerodynamic performance have been suggested. A variety of proposals for reducing induced drag, such as vortex diffusers, tip turbines, and special wing-tip geometry, may be relevant to HALE UAVs. In the committee’s opinion, however, the results to date on each of these concepts does not justify substantial additional research emphasis.
High-Speed, Maneuverable UAVs
Configuration Concepts
HSM mission requirements may dictate highly integrated and/or unconventional designs strongly influenced by aerodynamic characteristics. The need for high maneuverability may lead to configurations that lend themselves especially well to control at high angles of attack or that generate large nonlinear lift increments. Computational and experimental work will be required to identify planform geometries that produce desirable aerodynamic characteristics at high angles of attack.
Dynamic Lift
Design concepts that exploit dynamic lift are of great interest for vehicle design of HSM UAVs. These concepts include configurations and control devices that delay or control vortex bursting. Shed circulation strength and location can be influenced in a number of ways, including strakes, boundary-layer modification through blowing or local geometry changes, and more conventional controls.
Active Flow Control
In addition to the potential role of flow control in exploiting dynamic lift, more general applications of flow control are also of interest for HSM vehicles. The manipulation of separated flow fields may be accomplished efficiently by various flow-control technologies, and active manipulation could permit operation of HSM vehicles in nonlinear flow regimes that would otherwise be avoided, with the goal of increasing mission performance. Because the vortex-dominated flow field arises from separation near the leading edge, subtle changes in boundary-layer properties (due to blowing, suction, or small shape changes) can be used to manipulate leading edge vortices and produce large changes in vehicle forces and moments. Leading-edge flow control using blowing has been demonstrated in wind tunnel and computational simulations, providing control in flight regimes where conventional surfaces are ineffective. The use of these alternative control concepts is especially promising in applications, such as UCAVs, where radar
cross section is of critical concern, because they would eliminate the easily detected wing-flap interface (Ho and Tai, 1998).
Aerodynamic Modeling for Control Systems
Along with technologies that exploit unsteady aerodynamics and nonlinear, high angle-of-attack flows, improved techniques for assimilating these unconventional aerodynamic properties into vehicle simulation and control system design will be necessary. The concept of stability derivatives, which have proven to be very useful for linear design, should be augmented with the idea that aerodynamic properties are history dependent and highly nonlinear. Various modeling concepts, including indicial response models and neural networks (Faller et al., 1995), are currently being studied, but alternative concepts are required.
Small UAVs
Very small UAVs may benefit from a better understanding and enhanced modeling capabilities for very low Reynolds number flows and may also require unique aerodynamics technologies. In this viscous-dominated domain, boundary-layer control is especially important, although accomplishing this practically at the small scales envisioned here may be difficult. New propulsion technologies will also be critical for these small UAVs (see Chapter 5). Integrated propulsion systems, including flapping wings, become more attractive at smaller scales. Very small devices with centimeter-level dimensions would create unique challenges for aerodynamic design. Novel all-laminar sections have been developed, and techniques for introducing unsteady motions to increase maximum lift capability may be critical in this application (and may also be of interest for larger UAVs).
OPPORTUNITIES AND RECOMMENDATIONS
Recommendation. The U.S. Air Force should focus aerodynamic research on the following areas to maximize the benefit to future UAVs:
-
boundary-layer research focused on issues important to UAVs, including (1) transition prediction with (three-dimensional) pressure gradients, Reynolds numbers, and Mach numbers typical of UAV flight conditions and (2) improved flow modeling with part-chord natural laminar flow
-
techniques for real-time flow sensing and actuation
-
design architectures for complex multidisciplinary problems, including highly integrated systems
-
aeroelastic analysis and design approaches, especially for very flexible, unrestrained, actively-controlled aircraft
-
novel vehicle control concepts, including flow control
-
exploitation and modeling of unsteady, nonlinear, three-dimensional aerodynamics
-
design concepts for very low Reynolds numbers, including steady and unsteady systems
-
aerodynamic modeling concepts for designing vehicle control systems











