
Reengineering the Paralyzed Nervous System
P. HUNTER PECKHAM
Department of Biomedical Engineering
Case Western Reserve University
Cleveland, Ohio
INTRODUCTION
Damage to the central nervous system is the major cause of disability in the United States. In some cases, such as in spinal cord injuries or strokes, connectivity has been lost because the pathway has been severed. In other cases, such as in Parkinson’s disease, the neural circuits behave in a disordered fashion. Whether the origin of the damage is congenital, traumatic, or age-related, improving neural connectivity and restoring function has a major impact on the lives of people with these injuries. Many approaches to restoring the connectivity of neural elements are being explored (e.g., gene therapies, stem cell transplants, tissue engineering). One of the most promising is engineering, which can provide an interface with the nervous system to restore functions.
Through the delivery of low levels of electrical current in precise ways, control of the nervous system can be regained and function restored. Understanding how such an interface works requires a fundamental appreciation of the structure of nerves and how they work. First, consider a single nerve fiber. From the cell body, or soma, at one end, hundreds of dendrites emerge, through which input is provided to the cell. Only one axon leaves the cell. The axon delivers information to another structure, such as another nerve cell or a muscle cell. Electrical stimulation is usually delivered to the axon somewhere along its length. The electrical current causes the permeability of the membrane to change causing an efflux/influx of sodium, potassium, calcium, and other ions. When the difference across the membrane reaches a sufficient level, an action potential is generated that propagates along the axon in both directions from its point of origin. This fundamental principle, called “gating” the membrane potential, is the basis for restoring function to the nervous system by electrical activation.
The action potential generated by an electrical current causes events analogous to the events that occur in the normal generation of nerve impulses.
Using electrical current to restore neural function has many advantages. First, most events involving the nervous system are communicated naturally by electrical means. Second, electrical stimulation has the capacity (1) to activate a single nerve fiber or multiple nerve fibers to generate movement and sensation, (2) to inhibit the firing of nerve fibers to reduce spasticity and pain, and (3) to activate or inhibit complex neural circuits, called neuromodulation, to change the firing of entire circuits of cells so it could be used to restore a wide range of different functions. Third, the effect of electrical stimulation can be localized, and turning off the current can eliminate the effect. Currents could also be delivered in such a way as to prolong the effect by taking advantage of the inherent plasticity of the nervous system. Fourth, electrical stimulation is incredibly efficient. A very small amount of current can generate enough muscle activation to lift the body. Electrical stimulation also acts very rapidly; the effect can be observed in seconds. Finally, electrical stimulation can be applied safely. Methods of delivering electrical current to biological tissue have already been developed through careful research and testing. Safe, stimulating waveforms that use bidirectional pulses with charge densities below established limits are well tolerated by biological tissues. Thus, electrical stimulation is an extraordinarily versatile, effective, and safe tool for manipulating the activity of the nervous system.
Electrical activation of the nervous system is applicable to virtually every disorder involving the central nervous system (i.e., the brain and spinal cord). Some devices have already been granted regulatory approval and are commercially available in the United States. These include devices for restoring hand function, controlling bladder and bowel function, controlling respiration in spinal cord injuries, suppressing seizures in epilepsy, suppressing tremors in Parkinson’s disease, and restoring audition for people with hearing loss. Clinical research is being done on human subjects to enable patients to stand and walk, swallow, control the anal sphincter, and see. Basic research is also continuing on all of these applications to improve function and extend their applicability. For example, electrical stimulation has had limited success in restoring function in individuals with stroke, brain injuries, multiple sclerosis, and cerebral palsy, although theoretically their neurological disabilities can be overcome. For patients with spinal cord injuries, for example, the technique must be operable for extended periods of time, perhaps for 50 years or more. In addition, these injuries affect more than one organ system, the limbs and bladder, for instance. Ideally, therefore, the technology will be applicable to multiple systems.
IMPLEMENTATION OF NEUROPROSTHESES
Several factors must be considered in the clinical implementation of neuroprostheses. The use of a neuroprosthesis always involves trade-offs between physiological, technological, and clinical factors.
Physiological Considerations
Physiological factors are associated with the creation of a safe, effective interface between the prosthesis and the nervous system. First and foremost, the delivery of the electrical stimulus must be safe. A sufficient charge must be directed across the nerve membrane to depolarize it and generate action potentials, without generating toxic species in sufficient quantities to cause damage. Destruction (necrosis) or damage to the nerve tissue would exacerbate the problem. To understand the complexity of the problem, consider a device that could restore respiration. Biphasic (bidirectional or AC) current regulated pulses with charge reversal has been found to be effective. Eliciting an action potential in a compound nerve may require 10–20 mA at 30 V at a frequency of 20Hz 24 hours per day for up to 50 years.
Another physiological consideration is the control and coordination of activation of the muscle. The physiologic control of muscles is graded, and this must be duplicated in the reengineered system. There are only two fundamental mechanisms for controlling muscle force, (1) activating more muscle fibers (recruitment) or (2) activating muscle fibers faster. The latter leads to fatigue. Therefore, the preferable rate of stimulation is 20Hz or less. Controlling force by recruitment requires that the number of nerve fibers activated be increased as the controlling current is increased. The resulting activation is a nonlinear function, generally sigmoidally shaped. High-gain regions of the relationship may cause difficulties in control because small changes in current can cause large changes in the number of activated nerve fibers, as can small movements between the electrode and the nerve. In addition, a fundamental characteristic of muscle is that its force is dependent on its length; therefore, muscle length must also be considered in artificial control. Generally, an action is not caused by the “simple” generation of force from a single muscle but is the result of many muscles working together to produce the desired movement. Even for a simple movement, this means that one muscle (an agonist) increases in strength as a second muscle (an antagonist) works in opposition and decreases in strength. When one considers a complex action, such as walking or moving an arm, one can begin to appreciate the complexity of restoring movement through electrical activation.
The stability of the electrically activated response must also be considered. Muscles become fatigued with sustained contraction, whether naturally or electrically induced. With electrical stimulation, however, muscles become fatigued faster for two reasons. First, in an electrically stimulated contraction, there is
less rotation of activated fibers than in a natural, voluntary contraction. Second, paralyzed muscles are generally less able to sustain force because their metabolic properties have been compromised since the injury. Electrical activation can effectively reverse this “disuse atrophy” to increase the fatigue resistance of paralyzed muscles.
Technological Considerations
The fundamental technology in systems for neuroprosthetic devices includes stimulators, electrodes, sensors, and the lead wires or communication channels that connect them. The form of the technology depends on the application. In the examples given above, which must be used for a substantial portion of a person’s life, the most effective devices would be implanted. The specificity and reliability afforded by implantation results in vastly improved function and convenience for the user. Therefore, the device must be thoroughly reliable, designed to accommodate enhancements, and be repairable without compromising the remaining components.
The requirements for an electronic device that can operate in the body for 50 years are stringent. For example, the current technology used to control the motor system consists of a multichannel, implantable stimulator with multiple leads that extend from the implanted electronics to the terminal electrodes placed adjacent to the nerve-muscle connection in the distal limb. The implantable stimulator contains hybrid microelectronics to provide the stimulation and control functions. The battery is not implanted because power consumption is too high for this to be practical. (To get an idea of power consumption, consider a device with eight channels of stimulation activated at 10–20 mA at 30 V at a frequency of 20 Hz 24 hours per day.) Currently, the electronics are powered and controlled by a radio-frequency signal transmitted through the skin with tuned coils (transmission frequency approximately 6.7MHz).
The implanted electronics are protected from moisture by a titanium package with glass-metal feedthroughs for the leads. The configuration of the package depends on the application; generally 8 to 16 feedthrough pins are used for the stimulation and control functions. The leads present a difficult mechanical challenge because they are subject to repeated cycles of both bending and stretching. In addition, each lead must have a midline connector so repairs can be made in the event of failure. Stress concentrations are created both at these connectors and at the junction where the leads exit the feedthroughs. In addition, the passage of current through the electrodes causes electrochemical reactions at the interface to the tissue, which can cause degradation of the electrode, as well as the tissue. The biological compatibility of the materials with the surrounding tissue is essential in all types of implanted devices because any weakness in the design will be exploited by the environment. The problem is even more difficult for
neuroprosthetic applications in terms of protecting the implanted electronics and ensuring the long-term continuity of the lead electrode.
Clinical Considerations
In developing a neuroprosthetic device, it is particularly important to understand the function that is to be restored and how this aspect of the disability is treated medically. The technology must be not only functional, but must also be deployable by clinical practitioners (physicians, therapists, and nurses) whose appreciation of the complexity of the technology may be limited. The design must also meet the requirements of the user, such as an acceptable level of risk, time commitment, and the effort required for implementation and training. The neuroprosthesis must not only function acceptably, but it must also be easy and natural to use and easy to put on. Acceptable function may be less than full, normal function.
RESTORING UPPER LIMB FUNCTION
The focus of our work has been on a neuroprosthesis to restore hand and arm function (Figure 1) for people with cervical-level spinal cord injuries. These individuals have lost control of their hands and lower extremities but retain
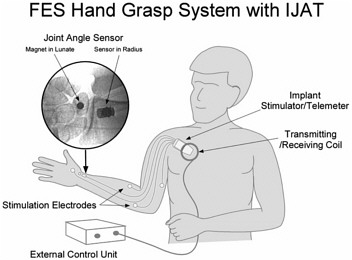
FIGURE 1 Sample implementation of neuroprosthesis for restoration of hand-arm control. SOURCE: Reprinted with permission from the Journal of Rehabilitation Research and Development (Bhadra et al., 2002).
control of their upper arms. The neuroprosthesis we have developed incorporates an implantable sensor that transduces joint angle (IJAT), a multichannel stimulator-telemeter, and an external control unit. Movements of the wrist are transduced by the IJAT and used to control the stimulation applied to the paralyzed finger and thumb muscles. Two grasp patterns are provided: (1) lateral pinch-release, in which the thumb contacts the side of the index finger; and (2) palmar prehension-release, in which the index and long fingers oppose the thumb. The former grip is typically used for picking up or holding small objects and the latter for grasping larger objects. Grasp is proportional; flexion of the wrist corresponds to full hand opening, and wrist extension corresponds to maximum grasping strength. Intermediate positions of the wrist correspond to intermediate grasp positions between these two extremes.
The system operates in the following manner. Contacting an external switch turns the system on, which transmits the radio frequency to the implant from the external controller, thus powering the transducer. This also establishes the “zero” command position of the wrist, corresponding to full hand extension, which is achieved by stimulating each of the target muscles at the appropriate level. For example, for hand extension, the finger and thumb muscles are maximally stimulated, and the finger and thumb flexors are inactive. These values are stored in a look-up table, in which any given wrist position corresponds to stimulus levels for each muscle. From the position of wrist extension, the user maneuvers the hand around the object and extends the wrist, causing the flexor muscles to be stimulated to a higher level and the extensor stimulation to decrease. Activating the external switch again sets a hold command, which maintains the stimulus level even if the wrist position changes. Other switch commands allow the user to regain control, reset zero, reset hold, or turn the system off. This system also enables users to regain control of elbow extension, which has been lost because of paralysis of the triceps. The switch enables the user to select alternative modes in which the triceps is either on or off.
This system is a second-generation neuroprosthesis, five of which have been implemented in human subjects. The first-generation neuroprosthesis, which has an external sensor on the opposite shoulder for control and eight channels of stimulation, has completed clinical trials (Peckham et al., 2001), has been approved by the Food and Drug Administration, and is commercially available (NeuroControl Corporation, Vallee View, Ohio). Approximately 200 first-generation devices have been implanted worldwide. Both systems enable people with spinal cord injuries to grasp and release common objects and thus perform many everyday activities, such as eating, writing, and grooming, These functions, which are essential for independence and self-sufficiency, often lead to dramatic changes in patients’ lives.
Future Development
Many new tools, such as sensors, electrodes, stimulators, and detailed “instruction sets” of how to use them, are expected to become available in the future. By describing how these tools interact with the underlying neural tissue and modeling this performance, the instruction set allows us to predict how the tools will perform in various situations. Sensors that detect physical movement, pressure, or electrical activity may be used for control or feedback.
Advances in microsensors and bioMEMS are likely to yield great dividends. Current triaxial accelerometers and micropressure transducers are small enough and low-power enough to be implanted in the body. With advances in electrode technology, we will be able to stimulate selected fascicles of a whole nerve and create unidirectional impulses on the nerve. This will make complete and selective activation of nerves possible, as well as the inhibition of neural activity, such as the blocking of spastic activity or pain. These electrodes will also make it possible to record the natural activity of afferent nerve fibers for feedback and control. The development of a microelectrode will make possible the stimulation of spinal circuitry and cortical centers and selective recording from these regions. Complex high-density circuitry could be incorporated into the electrodes themselves, which could lead to direct access to the central nervous system and direct interfaces with the neural circuitry that controls complex coordinated functions at the spinal or cortical level. It could also enable us to extract control information from cortical neurons and, eventually, to translate the intention to move into signals that could be used to control movement. Finally, high-density stimulation and transmitting devices are under development that will enable the activation of more channels of stimulation in a smaller volume; this would greatly facilitate the development of complex visual prostheses.
New technology will provide tools for the development of more precise interfaces with the damaged nervous system leading to even more significant clinical results. We have already made progress in this direction by showing that afferent signals recorded from the nerves innervating the bladder during filling could be used to help control bladder activity. The neuroprosthesis for hand control described above, which uses both implantable sensors and stimulators, is undergoing clinical evaluation. This device could eliminate much of the external hardware and provide natural control of the hand that is easy for the user to learn. Systems that provide more than one function are not far away.
In the future, neuroprostheses may be used independently or in conjunction with other approaches, which may ultimately provide the best effect. For example, the plasticity of the nervous system is being revealed in clinical trials for body-weight supported walking and constraint-induced arm therapy. Function probably improves because residual spinal and cortical circuits have the capacity to alter their functions in an activity-dependent way. These adaptations are driven
by the individual’s remaining voluntary function but could also be triggered or reinforced by an electrical stimulus.
Using these tools effectively and developing new tools will require continued progress in our understanding of the pathophysiology of neural injury and how to interact with disordered control. As these technologies mature and become more available, advances can be expected to accelerate. New devices will almost certainly address a wider range of problems and benefit a growing number of individuals. Electrical stimulation is a powerful tool that will continue to be an essential aspect of new devices to mitigate the effects of disabling central nervous system conditions.
ACKNOWLEDGMENTS
The research described in this article was supported in large part by the National Institutes of Health, the National Institute of Neurological Disease and Stroke Neural Prosthesis Program, and the Department of Veterans Affairs Rehabilitation Research and Development Service. Support was also received from the Food and Drug Administration Orphan Products Division, the Paralyzed Veterans of America Spinal Cord Research Foundation, the Movement Disorder Foundation, and the Shapiro Foundation.
REFERENCES
Bhadra, N., P.H. Peckham, M.W. Keith, K.L. Kilgore, and F. Montague. 2002. Implementation of an implantable joint angle transducer. Journal of Rehabilitation Research and Development 39(3):411–422.
Brindley, G.S., and D.N. Rushton. 1995. The sacral anterior root stimulator as a means of managing the bladder in patients with spinal cord lesions. Bailliere’s Clinical Neurology 4(1):1–13.
Chapin, J.K., and K.A. Moxin, eds. 2000. Neural Prostheses for Restoration of Sensory and Motor Function. Boca Raton, Fla.: CRC Press.
Creasey, G.H., and P.H. Peckham, eds. 1999. Functional Electrical Stimulation. Topics in Spinal Cord Injury Rehabilitation, Vol. 5, no. 1.
Peckham, P.H., M.W. Keith, K.L. Kilgore, J.H. Grill, K.S. Wuolle, G.B. Thorpe, P. Gorman, J. Hobby, M.J. Mulcahey, S. Carroll, V.R. Hentz, and A. Wiegner. 2001. Efficacy of an implanted neuroprosthesis for restoring hand grasp in tetraplegia: a multicenter study. Archives of Physical Medicine and Rehabilitation 82:1380–1388.
Triolo, R.J., ed. 2000. Electrical Stimulation. Assistive Technology (Special Issue), Vol. 12, no. 1.








