
D
Some Key ISR Assests, Current and Planned
This appendix describes several key intelligence, surveillance, and reconnaissance (ISR) assets in more detail than was possible in Chapter 7. Section D.1 addresses current and planned systems for airborne surveillance, including a number of joint sensor platforms and sensors. Section D.2 summarizes current and planned systems for antisubmarine warfare (ASW), independent of platform or basing mode.
D.1 SURVEY OF CURRENT AND PLANNED AIRBORNE ISR PLATFORMS
This section presents a survey of current and planned airborne ISR platforms. Airborne platforms as a whole provide ISR in support of strike, theater air and missile defense (TAMD), ASW, antisurface warfare (ASuW), and Naval Fire Support missions for naval strike groups.
D.1.1 E-2C Hawkeye
The all-weather E-2C Hawkeye airborne early warning and control (AEW&C) aircraft provides simultaneous air and surface surveillance, command and control of aircraft, and communications relay. It is carrier-based and has a five-person crew. Figure D.1 shows the evolution of the E-2C over the past decade and the significant upgrades planned for the future. An integral component of the carrier air wing, the E-2C carries three primary sensors: (1) APS-145 radar, (2) identification friend or foe (IFF), and (3) the ALR-73 Passive Detection System.
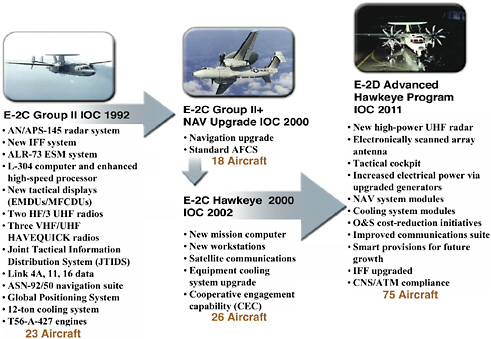
FIGURE D.1 E-2 evolution: past, present, and future. NOTE: IOC, initial operating capability; IFF, Identification Friend or Foe; EMDU, enhanced main display unit; MFCDU, multifunction control and display unit; AFCS, Automatic Flight Control System; O&S, operations and support; CNS/ATM, civil communication, navigation, surveillance/air traffic management. SOURCE: Courtesy of Northrop Grumman Corporation.
These sensors are integrated through a general-purpose computer that enables the E-2C to provide early warning, threat analyses, and control of counter action against air and surface targets. Each E-2C can track, automatically and simultaneously, more than 600 targets and control more than 40 airborne intercepts. The E-2C Hawkeye 2000 is being equipped with the cooperative engagement capability (CEC), greatly extending the battlespace for participants on the network and the ALQ 217 Electronic Support Measures System, which extends the passive detection range.
The APS-145 radar is located in the rotodome atop the aircraft. It rotates at six revolutions per minute and operates in the radio frequency (RF) range from 0.5 to 1 GHz. The Group II upgrade, which is currently under way, provides fully automatic overland targeting and tracking capability, a 40 percent increase in radar and IFF range, improved displays, increased target tracking capacity, Global Positioning System (GPS), Joint Tactical Information Distribution System (JTIDS), and voice satellite communications.
As part of the E-2D Radar Modernization Program, the APS-145 will be replaced with a new, solid-state, electronically steered ultrahigh-frequency (UHF)
radar. This will enable the E-2D to significantly increase the number of targets that the aircraft can detect, track, and feed into the CEC network and provide some theater missile defense capabilities.
The E-2D is key to the envisioned Future Naval Capability to project cruise missile defense ashore, that is, to defend a landing force against land-attack cruise missiles. For its part, the E-2D will detect the land-attack cruise missiles and help guide air defense missiles launched from ships offshore.
D.1.2 P-8A Multimission Maritime Aircraft
The P-8A Multimission Maritime Aircraft (MMA) has an initial operating capability (IOC) of 2013. It replaces the venerable P-3C Orion and adds new capabilities. Its principal missions are armed, persistent antisubmarine and antisurface warfare. It will also have a significant role in persistent intelligence, surveillance, and reconnaissance (ISR) because of its organic sensor capabilities.
The P-8A MMA airframe is a derivative of a commercial Boeing 737-800 aircraft (see Figure D.2). It will be land-based like the P-3C and will have a similar operating envelope. However, it will be capable of a carrying a larger payload and will have ample space and capacity for the growth of internal subsystems and components.
P-8A MMA sensors include synthetic aperture radar (SAR) and inverse SAR, surface-search radar, electro-optical (EO) and infrared (IR), magnetic anomaly detection (MAD), and both active and passive sonobuoys. Its weapons include torpedoes, antisurface missiles, and mines. Weapons are either carried under the wings or in the bomb bay.

FIGURE D.2 P-8A Multimission Maritime Aircraft (artist’s concept). SOURCE: Courtesy of the Department of the Navy.

FIGURE D.3 Aerial common sensor (ACS) (artist’s concept). SOURCE: Courtesy of Lockheed Martin Corporation.
D.1.3 Aerial Common Sensor
The aerial common sensor (ACS) will be the next-generation U.S. Army and U.S. Navy airborne reconnaissance, intelligence, surveillance, and targeting acquisition system (see Figure D.3). The joint acquisition program is led by the Army. The system is composed of the aircraft, the mission payload, and the ground processing facility. The aircraft platform will be based on the Embraer ERJ-145 Regional Jet. It is intended to replace and improve on the Army’s current fleet of Airborne Reconnaissance Low and Guardrail/Common Sensor (GR/CS) aircraft and the Navy’s aging fleet of EP-3 Aries aircraft.
The objective of the ACS is to provide the warfighter with timely, multisource intelligence. It will contain sensors that provide signals intelligence (SIGINT), image intelligence (IMINT), and measurement and signatures intelligence (MASINT) information. It will employ the multiple sensor types synergistically, using onboard and off-board data correlation. Intelligence operators, analysts, and software algorithms onboard the aircraft or in ground facilities will combine and correlate information from the various sensors to provide the combat forces with a more comprehensive intelligence product.
D.1.4 F/A-18C/D Hornet
The F/A-18C/D Hornet is a single-seat/two-seat, twin engine, multimission fighter/attack aircraft that can operate from either aircraft carriers or land bases (Figure D.4). It became operational in 1987. The D model is the current Navy aircraft for attack, tactical air control, forward air control, and reconnaissance squadrons. The F/A-18D is equipped with the Advanced Tactical Air Reconnaissance System (ATARS) and AN/APG-73 radar.

FIGURE D.4 ATARS on the F/A-18D Hornet. SOURCE: Available at <http://www.chinfo.navy.mil/navpalib/policy/vision/vis02/vpp02-ch3p.html>. Accessed January 26, 2006.
ATARS is a near-real-time, digital, high-resolution tactical reconnaissance system carried in a pod. Combined with the SAR capability of the AN/APG-73 radar, ATARS will provide the F/A-18D with a reconnaissance package capable of day-or-night, through-the-weather imaging electro-optic/infrared overflight, and long-range standoff SAR. ATARS passes data via the Common Data Link to the Joint Services Imagery Processing System and the Marine Corps Tactical Exploitation Group for image processing and exploitation. IOC was achieved in fiscal year (FY) 2000, and a total of 19 ATARS suites are planned.1
D.1.5 F/A-18E/F Super Hornet
The F/A-18 E/F Super Hornet is a single-seat/two-seat, twin engine, multimission fighter/attack aircraft that can operate from either aircraft carriers or land bases (see Figure D.5).
|
1 |
For further information, see <http://www.chinfo.navy.mil/navpalib/factfile/aircraft/air-fa18.html> and “VISION … PRESENCE … POWER, A Program Guide to the U.S. Navy,” 2002 ed., available at <http://www.chinfo.navy.mil/navpalib/policy/vision/vis02/vpp02-ch3p.html>. Accessed January 26, 2006. |

FIGURE D.5 F/A-18 E/F Super Hornet. SOURCE: Courtesy of the Department of Defense.
The F/A-18 is equipped with several sensor systems including the APG-79 active electronically scanned array (AESA) radar, Advanced Targeting Forward Looking Infrared (ATFLIR), Positive Identification System, and ALR-67(V)3 Radar Warning Receiver.
The AESA radar will be the primary search and weapons-control radar for the F/A-18E/F aircraft beginning in FY 2005. AESA’s expanded capabilities will enable significantly greater detection and tracking ranges and will provide high-resolution SAR imagery, beyond the capabilities of the APG-73. Additionally, the interferometric capabilities of the AESA will enable future interfacing with the ALR-67(V)3 receiver to support SIGINT.
ATFLIR is a pod-mounted system that incorporates a navigation forward-looking infrared (FLIR) system, a targeting FLIR, a laser spot tracker, a laser target designator/ranger, and an EO sensor function. System accuracy will support first-pass autonomous delivery of both conventional and precision-guided weapons. All imagery and target data are passed to the mission computer for further dissemination. The ATFLIR is optimized for the air-to-ground role, but it can perform air-to-air targeting as well.
In data link improvements due to be completed this year, AESA and ATFLIR imagery will be transferable to other warfighters through Link 16 and ARC 210 radio.
F/A-18E/Fs are also capable of carrying the shared reconnaissance pod (SHARP), which contains EO and IR sensors and a Common Data Link (CDL) to transmit imagery. SHARP, in conjunction with either the APG-73 Phase II upgrade or AESA radar, will also permit the acquisition and transfer of SAR imagery. The pod will also permit onboard storage of imagery. (See Section 6.3.5 for more details on the communications-versus-latency challenge posed by SHARP-like sensors.)

FIGURE D.6 F-35C Joint Strike Fighter (JSF) (carrier-based variant for the U.S.Navy). SOURCE: <http://www.airforce-technology.com/projects/jsf.html>. Accessed January 26, 2006.
D.1.6 F-35 Joint Strike Fighter
The Joint Strike Fighter (JSF) (see Figure D.6) is currently being developed for the U.S. Air Force, Navy, and Marine Corps and the Royal Navy (United Kingdom). The stealthy, supersonic multirole fighter is being built in three variants: a conventional-takeoff-and-landing aircraft (CTOL) for the U.S. Air Force (F-35A), a carrier-based variant for the U.S. Navy (F-35C), and a short-takeoff-and-vertical landing (STOVL) aircraft for the U.S. Marine Corps and the Royal Navy (F-35B).
The F-35 can be seen as a producer of sensor data, with each aircraft interacting through inter- and intraflight data links with coalition forces. The native situational awareness of each F-35 is formed by the fusion of information generated by three key systems, described below.
The heart of the F-35’s sensor suite is the AN/APG-81 multimission active electronically scanned array, or as it is more commonly known, the multifunction array (MFA). The MFA is capable of ground moving target indicator (GMTI) and low-, medium-, and high-resolution SAR mapping. The AN/APG-81 will also provide multiple-volume search capability against air-to-air threats. Finally, the AESA provides passive electronic surveillance and effective jamming capability.
The “distributed aperture system” includes six IR sensors mounted on different points of the fuselage to provide full spherical coverage for short-range air-to-air missile targeting, defensive infrared search and tracking of enemy fighters,
air-to-air and surface-to-air missile tracking, detection and targeting of ground elements, and passive tracking of flight members.
Targeting is performed by the electro-optical targeting system that provides day-and-night passive, classification, identification, and targeting versus stationary and moving ground targets in visual meteorological conditions.
D.1.7 SH-60 Seahawk (LAMPS) Helicopter
The SH-60/MH-60 is a twin-engine helicopter used for antisubmarine warfare, search and rescue, drug interdiction, antiship warfare, cargo lifting, and special operations (see Figure D.7). Several variants exist or are under development. The SH-60B Seahawk or Light Airborne Multipurpose System (LAMPS) is based aboard cruisers, destroyers, and frigates. In its ASW role it can employ sonobuoys and a magnetic anomaly detector for locating and tracking targets. The APS-124 radar and ALQ-214 ESM system are used against surface targets. The SH-60B may use guns, Penguin missiles, and torpedoes to attack targets. The SH-60F is carrier-based and provides inner zone ASW defense. It employs an ASW suite that includes a dipping sonar.
The MH-60R Strikehawk is the replacement for the SH-60B and is also known as LAMPS Block II. A dipping sonar is added, but the MAD sensor is removed. The upgraded radar is the APS-147, a FLIR is added, and it is also capable of carrying the Hellfire antiarmor missile.
Helicopter-based ASW systems are discussed in more detail in Section D.2.3 below.

FIGURE D.7 SH-60B Seahawk (LAMPS). SOURCE: Courtesy of the Department of the Navy.

FIGURE D.8 E-8C Joint Surveillance Target Attack Radar System. SOURCE: Courtesy of the Department of the Air Force.
D.1.8 E-8C JSTARS
The E-8C Joint Surveillance Target Attack Radar System (JSTARS) is an airborne battle-management command and control, intelligence, surveillance, and reconnaissance (C2ISR) platform (see Figure D.8). Its primary mission is to provide theater ground and air commanders with ground surveillance to support attack operations and targeting. The information is relayed in near real time to the Army and Marine Corps common ground stations and to other ground command, control, communications, computers, and intelligence (C4I) nodes.
The E-8C is a modified Boeing 707-300 series commercial airframe extensively remanufactured and modified with radar, communications, and operations and control subsystems. The most prominent external feature is the canoe-shaped radome under the forward fuselage that houses the 24 ft long, side-looking phased array antenna. The antenna can be tilted to either side of the aircraft, where it can develop a 120-degree field of view covering nearly 20,000 mi2 and is capable of detecting targets at more than 150 nmi.
D.1.9 E-3 Sentry (AWACS)
The E-3 Sentry is an airborne warning and control system (AWACS) aircraft that provides all-weather surveillance and command, control, and communications (C3) (see Figure D.9). It is a modified Boeing 707-320 commercial airframe with a rotating radar dome. Its nominal crew size is 17.
The radar subsystem permits surveillance from Earth’s surface up into the stratosphere, over land or water. The radar has a range of more than 250 mi for low-flying targets and farther for aerospace vehicles flying at medium to high altitudes. The radar combined with an IFF subsystem can look down to detect,

FIGURE D.9 E-3 Sentry (AWACS). SOURCE: Courtesy of the Department of the Air Force.
identify, and track naval vessels and low-flying aircraft by eliminating ground clutter returns that confuse other radar systems. The information can be sent to major command-and-control centers in rear areas or aboard ships.
D.1.10 U-2
The U-2 provides continuous day-and-night, high-altitude, all-weather surveillance and reconnaissance in direct support of U.S. and allied ground and air forces (see Figure D.10). It is a single-seat, single-engine, high-altitude, surveillance and reconnaissance aircraft. Long, narrow, straight wings give the U-2 glider-like characteristics and allow it to lift heavy sensor payloads to unmatched high altitudes quickly and to keep them there for a long time. The U-2 is capable of collecting multisensor photo, EO, IR, and radar imagery, as well as collecting SIGINT data. It can downlink all data, except wet film, in near real time to anywhere in the world, providing war planners with the most current intelligence possible.
D.1.11 RC-135 Rivet Joint
The RC-135 Rivet Joint reconnaissance aircraft supports theater- and national-level consumers with near real time on-scene intelligence collection, analysis, and dissemination capabilities (see Figure D.11). The aircraft is an extensively modified C-135. The Rivet Joint’s modifications are primarily related to


its onboard sensor suite, which allows the mission crew to detect, identify, and geolocate signals throughout the electromagnetic spectrum. The mission crew consists of 32 people. The data that it collects can be forwarded in a variety of formats to a wide range of consumers via Rivet Joint’s extensive communications suite.
D.1.12 E-10 Multi-Sensor Command and Control Aircraft
The E-10 Multi-Sensor Command and Control Aircraft (MC2A) will provide ground moving target indication, some air moving target indication, and key battle-management command and control. The aircraft is expected to be a central element in the Air Force’s Command and Control Constellation, a concept that envisions a fully connected array of land-, platform- and space-based sensors using common standards and communication protocols to relay information automatically in machine-to-machine interfaces.
The MC2A airframe will be a derivative of the Boeing 767-400ER platform. MC2A capabilities will be acquired in spiral development. Increment 1 will deliver by 2013 a robust GMTI capability and a focused airborne moving target indicator (AMTI) capability to support cruise missile defense operations. The radar will be produced by the Multi-Platform Radar Technology Insertion (MP-RTIP) Program (Northrop Grumman). Increment 1 will also deliver a BMC2 subsystem consisting of central computing architecture, networks, data storage, data manipulation, data fusion, data exploitation, communications, and data link capability.
D.1.13 Global Hawk Unmanned Aircraft System
The Global Hawk is a land-based, high-altitude, long-endurance unmanned aircraft system (UAS) for wide-area ground surveillance (see Figure D.12). The current Global Hawk UAV is designated the RQ-4A. It has a wingspan of 116 ft, is 44 ft long, and weighs 26,750 lb when fully fueled. Its sensors include a SAR/GMTI as well as EO and IR cameras. Other payloads under development or being considered for the Global Hawk include SIGINT, communications relay, and foliage penetration/multispectral sensing. Collected data, including imagery, can be relayed in near real time to battlefield commanders via satellite or via the Common Data Link.
A larger version of the Global Hawk, the RQ-4B, is currently under development, with a planned initial delivery in 2006. It has a longer body and larger wing than the RQ-4A. The nominal payload of the RQ-4A is 2,000 lb, while the RQ-4B can carry approximately 3,000 lb.
The Navy initiated the Global Hawk Maritime Demonstration to explore the requirements and operational concepts for maritime and littoral ISR (see the next subsection, on BAMS). Two Global Hawk RQ-4A aircraft with the USAF sensor hardware and ground stations are being acquired.

FIGURE D.12 Global Hawk UAS. SOURCE: Courtesy of the Department of the Air Force.
D.1.14 BAMS Unmanned Aircraft System
The objective of the Broad Area Maritime Surveillance (BAMS) UAS Program is to accelerate the development and acquisition of a multimission unmanned platform capable of surveillance and reconnaissance of maritime and land targets, strike support, SIGINT collection, and communications relay. BAMS unmanned aerial vehicle (UAV) attributes will include long-range, persistent dwelling ISR and global coverage. When fielded, BAMS will provide fleet commanders around-the-clock access throughout the world. This 24-hour coverage could be sustained for a carrier strike group or expeditionary strike group’s entire deployment. A BAMS UAV Analysis of Alternatives, concept of operations (CONOPS), command, control, communications, computers, and intelligence support plan (C4ISP), and Operational Requirements Document (ORD) are now being developed. A variety of vendors and platforms are competing for the BAMS mission, including the Northrop Grumman Global Hawk UAS, the General Atomics Predator B UAS, and possibly unmanned variants of manned aircraft, to name a few.
BAMS will function as an enabling force to the fleet commander. The draft BAMS UAS CONOPS suggests that a persistent ISR UAS will enhance battlespace awareness through imagery, SAR/ISAR, and strip mapping. The BAMS UAS will act as an information hub and operate in direct collaboration with other manned and unmanned airborne and space-based ISR platforms to

FIGURE D.13 Predator UAV. SOURCE: Courtesy of the Department of the Air Force.
support the employment of naval forces in both the planning and execution phases of contingency operations. It will be fully interoperable with manned assets, other ISR platforms, and intelligence exploitation systems.
D.1.15 MQ-1/9 Predator
The MQ-1 Predator (Figure D.13) is a land-based, medium-altitude, long-endurance unmanned aerial vehicle system. Originally designated the RQ-1, its designation was changed to MQ-1 to signify the change from strictly reconnaissance (“R”) to multirole (“M”). The MQ-1’s primary mission is interdiction and the conduct of armed reconnaissance against critical, moving targets.
It has a wingspan of 49 ft, is 29 ft long, and when fully fueled weighs approximately 2,250 lb, including a 450 lb payload. Its sensors include a color nose camera (generally used by the aerial vehicle operator for flight control), a day-time variable-aperture TV camera, a night-time variable-aperture IR camera, and a SAR. The cameras produce full-motion video and the SAR provides still-frame radar images. The Predator also carries the Multispectral Targeting System (MTS) with inherent AGM-114 Hellfire missile-targeting capability and integrates electro-optical, infrared, laser designator and laser illuminator into a single sensor package. The aircraft can employ two laser-guided Hellfire antitank missiles with the MTS ball.
A fully operational Predator system consists of four aircraft (with sensors), a ground control station (GCS), a Predator Primary Satellite Link, and approximately 82 personnel for continuous 24-hour operations. The basic crew for the Predator is 1 pilot and 2 sensor operators. They fly the aircraft from inside the GCS via a C-band line-of-sight data link or a Ku-band satellite data link for beyond-line-of-sight flight.
The Predator B, MQ-9, is a larger, more capable, version of Predator. Its initial flight occurred in February 2001. It has a wingspan of 64 ft and is 36.2 ft long. It has a maximum ceiling of 45,000 ft and can loiter for more than 24 hours at a range of 400 nmi. It has an internal payload capacity of 750 lb and can carry up to 3,000 lb externally, including up to 10 Hellfire missiles.
D.1.16 Fire Scout VTUAV
Northrop Grumman’s Fire Scout-Vertical Takeoff and Landing Tactical Unmanned Aerial Vehicle (VTUAV) System (Figure D.14) will provide situational awareness and precision targeting support for the U.S. Navy and Marine Corps. The Model 379 Fire Scout has the ability to autonomously take off and land on any aviation-capable warship and at unprepared landing zones.
The Fire Scout System includes advanced ground control facilities that encompass the forward-deployed Marine Corps portable ground station, tactical datalinks, and communications, as well as the U.S. Navy’s ship-based Tactical Control Station.
With vehicle endurance greater than 6 hours, the Fire Scout will be capable of continuous operations providing coverage 110 nmi from a launch site. It con-

FIGURE D.14 Fire Scout VTUAV. SOURCE: Courtesy of the Department of Defense.
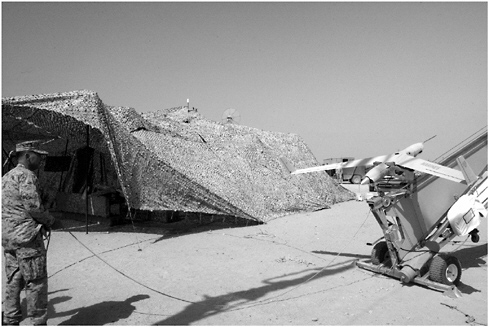
FIGURE D.15 Scan Eagle. SOURCE: Available at <http://www.usmc.mil/marinelink/mcn2000.nsf/ac95bc775efc34c685256ab50049d458/af1257cba55332b685256fea005af24e?OpenDocument>. Accessed January 26, 2006.
tains a baseline payload that includes EO and IR sensors, and a laser designator enabling the Fire Scout to find tactical targets, track and designate targets, and accurately provide targeting data to strike platforms and perform battle damage assessment. The Fire Scout could also act as a communications node.
D.1.17 Scan Eagle
The Scan Eagle (Figure D.15) is a low-cost, long-endurance, fully autonomous UAV that provides intelligence, surveillance, and reconnaissance support for the Marine Expeditionary Force during operational missions. The air vehicle is 4 ft long and has a 10 ft wingspan. It carries either an electro-optical or infrared camera, enabling the operator to track both stationary and moving targets. Its maximum altitude is greater than 16,000 ft, and it can remain in flight for more than 15 hours. It is launched autonomously by a pneumatic wedge catapult launcher and flies preprogrammed or operator-initiated missions. It is retrieved using a skyhook system in which the UAV catches a rope hanging from a 50 ft high pole.
A Scan Eagle mobile deployment unit (SMDU) consists of several air vehicles, computers, communication links, and ground equipment. Two SMDUs
have been deployed to Iraq. A communications relay payload for the Scan Eagle is under development. It includes streaming video and Voice-over Internet Protocol communications.2
D.2 SURVEY OF CURRENT AND PLANNED ASW SENSORS
This section presents a survey of current and planned ASW sensors.
In brief, the ASW mission today involves ship, submarine, and airborne sensors, together with arrays of sonar sensors deployed on the ocean floor. Surface combatant ships and attack submarines carry hull-mounted sonars and towed arrays. Fixed-wing aircraft and helicopters carry magnetic anomaly detection sensors; traditional EO, IR, SIGINT, and radar systems; sensors optimized for detecting periscopes in sea clutter; and dipping sonars. A class of noncombatant ships keeps station in specific ocean areas and tows sonar arrays. Several types of deployed sonar arrays exist or are under development. The arrays send raw acoustic data over connecting cables to shore sites or, in the future, to the LCS. The following subsections discuss ASW sensors in more detail.
D.2.1 Surface Combatant ASW Sensors
-
SQS-53 Series Hull-mounted Sonar: The current active/passive low-frequency sonar on the bow of CG-47 and DDG-51 class ships.
-
SQS-56 Active/Passive Hull-mounted Sonar: The current active/passive medium-frequency sonar on the bow of FFG-7 class ships.
-
SQR-19 Tactical Towed Array System (TACTAS): The legacy passive acoustic towed array on CG-47, FFG-7, and some DDG-51.
-
Multi-Function Towed Array (MFTA): The current (just entering the fleet on DDG-51 and CG-47 classes) low- and mid-frequency bistatic/multistatic towed array receiver capability potentially used in conjunction with various active acoustic sources (e.g., SQS-53, airborne low-frequency sonar [ALFS] dipping sonar). MFTA is also capable of conventional passive acoustics for the detection of submarines or torpedoes.
-
Littoral Combat Ship (LCS)-related ASW sensors: LCS will primarily rely on off-board sensors for ASW. These could include sensors employed by the SH-60R helicopter (e.g., ALFS, various sonobuoys, MAD), sensors employed by various off-board vehicles (e.g., unmanned surface vehicle, vertical takeoff unmanned airborne vehicle, unmanned undersea vehicle), or sensors deployed by LCS itself (e.g., automatic dependent surveillance [ADS], extended echo ranging
|
2 |
Further information is available at <http://www.boeing.com/phantom/advsystems/scaneagle.html and http://www.isrjournal.com/story.php?F=588644>. Accessed January 26, 2006. |
-
[EER] series). The ASW mission packages for LCS are in development; their final configurations and variants are uncertain at this time.
D.2.2 Submarine ASW Sensors
-
TB-16 Submarine “Fat Line” Towed Array: The legacy 3.5 in. diameter 240 ft long passive acoustic towed array on SSN-688, SSN-688I, SSN-21 and SSN-774 classes.
-
TB-23 Submarine Thin Line Towed Array: The legacy, reduced-diameter, passive acoustic towed array on SSN-688, SSN-688I, SSN-21 and SSN-774 classes.
-
TB-29 and TB-29A (COTS version) Submarine Thin Line Towed Array: Both the current legacy TB-29 and the TB-29A under development are passive acoustic towed arrays for use on SSN-688, SSN-688I, SSN-21 and SSN-774 classes. The TB-29 series is longer and more capable than the TB-23. Neutrally buoyant variants of the TB-29 are under development for use in the shallow littorals. A TB-33 Fiber Optic Thin Line Towed Array is being considered for acquisition.
-
BQQ-5 (688 class)/BSY-1 (688I class)/BSY-2 (SSN-21 class) Series Bow-Mounted Spherical Array: The current low-frequency passive and active bow sonars on existing classes of submarines.
-
BQQ-10 (SSN-774 class) Bow Array: The planned, low-frequency passive and active bow sonar for use on the SSN-774 class of submarines.
-
BQG-5 Series Wide Aperture Array (WAA) Flank Array: A passive flank array on the SSN-688, SSN-688I, SSN-21 and SSN-774 classes that provides long-range target location capability.
-
High Frequency Sail Array: The current HF active sonar mounted on the sail of existing classes of submarines, including a precision underwater mapping capability; a similar capability is planned for SSN-774 class.
D.2.3 Aircraft ASW Sensors
-
AN/SSQ-53 DIFAR Series Sonobuoy: The Directional Frequency and Recording (DIFAR) sonobuoy is a passive listening receiver that provides bearing information on detected underwater targets. All current and planned ASW aircraft (SH-60B, SH-60F, SH-60R, P-3, MMA) are capable of employing DIFAR.
-
AN/SSQ-62 DICASS Series Sonobuoy: The Directional Command Activated Sonobuoy System (DICASS) transmits (and subsequently receives) an omnidirectional active sonar pulse. Range and bearing information is provided by this sonobuoy. All current and planned ASW aircraft are capable of employing DICASS.
-
AN/SSQ-77 VLAD Series Sonobuoy: The Vertical Line Array DIFAR (VLAD) sonobuoy is a passive listening receiver consisting of several hydro-
-
phones placed in a vertical string in order to use beam-forming techniques to reject distant shipping noise (useful for long-range search in deep waters). All current and planned ASW aircraft are capable of employing VLAD.
-
AN/SSQ-110 EER Series Sonobuoy: The extended echo ranging (EER) sonobuoy transmits a broadband incoherent acoustic pulse that can be received by a passive sonobuoy such as the VLAD (including in bistatic geometries). A near-term, improved version of EER known as IEER is just entering the fleet; it is designed for use in shallow littorals (in addition to the original deep-water application for EER). A long-term, advanced version of EER known as AEER is in development. Unlike EER and IEER, the AEER system will feature coherent pulses. The EER series is designed for employment by fixed-wing ASW aircraft (P-3, MMA).
-
AN/SSQ-101 ADAR Series Sonobuoy: The Air Deployable Active Receiver (ADAR) sonobuoy is a horizontal planar array (40 hydrophones) that will be capable of working as a receiver for EER (as part of the IEER series that is just entering the fleet and potentially as part of the AEER series that is under development).
-
Magnetic Anomaly Detection (MAD): Many U.S. Navy ASW aircraft (fixed wing, helicopters) are equipped with variations of the AN/ASQ-81 MAD system to detect natural and human-made differences in Earth’s magnetic field (including the passing of large ferrous objects such as submarines).
-
Traditional Airborne EO/IR, ESM and Radar Systems: All U.S. Navy ASW aircraft have some combination of electro-optic/infrared devices, electronic support measure equipment (to detect electronic emissions), and radars. Unfortunately, most of the EO/IR and radar devices are not optimized for detecting a submarine periscope or mast amidst normal sea clutter.
-
Automatic Radar Periscope Detection and Discrimination (ARPDD): An airborne ARPDD system is under development that exploits automatic target recognition capability to discriminate periscopes from other small objects on or near the surface of the ocean. The system is planned to be employed on P-3 and MMA. Similar periscope detection radar technology is being considered for shipboard use (not yet in acquisition).
-
AN/AQS-13 Series Dipping Sonar: The legacy dipping sonar that is employed by SH-60F helicopters. The helicopter lowers the transducer into the water while hovering, and the transducer both transmits and receives active acoustic signals.
-
AN/AQS-22 ALFS Dipping Sonar: The airborne low frequency sonar (ALFS) dipping sonar is just now entering the fleet as part of the SH-60R helicopter program. ALFS will operate at lower frequency than legacy dipping sonars do, which will increase the opportunities for long-range detections.
D.2.4 UNDERSEA SURVEILLANCE SENSORS
-
UQQ-2 Twin-Line Surveillance Towed Array Sensor System (SURTASS): SURTASS is a current passive acoustic surveillance system towed from T-AGOS surface platforms. The legacy SURTASS long-line passive acoustic arrays are currently being replaced by shorter twin-line (a pair of arrays towed side-by-side) passive acoustic arrays to enhance capabilities in shallow and littoral regions. There are near-term plans to convert all twin-line systems to the TB-29 towed array series.
-
UQQ-2 Surveillance Towed Array Sensor System/Low Frequency Active (SURTASS/LFA): LFA is the current (just entering the fleet) active adjunct to SURTASS. LFA includes a low-frequency active sonar transmitter deployed below a SURTASS ship and uses the SURTASS passive towed array as the receiver.
-
Compact Low Frequency Active (CLFA) for SURTASS: A smaller, lighter, active source is being developed for use with SURTASS in the littorals.
-
Sound Surveillance System (SOSUS): SOSUS is the legacy fixed component of the USN integrated undersea surveillance system (IUSS) developed for deep-ocean surveillance during the Cold War. The program was begun in the 1950s and consists of passive acoustic arrays mounted on the ocean bottom (or on continental slopes or on sea mounts) at locations optimized for long-range acoustic propagation. The acoustic information from the arrays is cabled back to shore for processing by operators. Since the end of the Cold War some sites have been shut down, but the remaining sites are either operational or in standby status.
-
Fixed Distributed System (FDS) and Fixed Distributed System-COTS (FDS-C): FDS-C is a developmental, commercial-off-the-shelf version of the legacy long-lifetime, passive acoustic fixed surveillance system FDS. Both FDS and FDS-C are a series of arrays (i.e., a distributed barrier or field of acoustic arrays) deployed on the ocean bottom in deep-ocean areas, across straits and other chokepoints, or in strategic shallow-water/littoral areas. The acoustic information from these arrays is sent back via cable to shore sites for processing by operators.
-
Advanced Deployable System (ADS): ADS is a developmental program intended to be initially employed by the LCS as one of its ASW mission module options. It is a rapidly deployable, short-lifetime (expendable, battery-powered), large-area, undersea surveillance system. The ADS passive acoustic arrays are deployed on the ocean bottom in shallow-water/littoral environments and in key straits and chokepoints. It is a cable-based system with both internode cable between arrays and trunk-line cable to support RF communications in the vicinity of the LCS (to allow monitoring of the ADS arrays).




















