
3
Components of Building Protection: Building Design, Technologies, and Operational Responses
To achieve the specific goals for building protection from a variety of biological and chemical threat types and to meet the requirements set by building administrators, designers, and security experts, many components can be selected. Selection of components requires an evaluation of many facility-specific details. Buildings have to be evaluated largely on a case-by-case basis because buildings vary in their “tightness”: that is, their resistance to infiltration of outside air, leakiness of their air transport systems, location, degree of physical security and access to outsiders, training of the occupants, options for personal protection, and ability of surrounding resources to respond to an incident. (Figure 3-1 illustrates the complexity of planning for protection.) The relative importance of different possible outcomes of a biological or chemical attack is determined by the activities (operations or missions) in the facility. The activities also determine the required response time of the building protection to certain threats—for example, if continuity of operations in the facility is necessary, then a rapid response to fast-acting threat types is required to ensure continuous operation.
To facilitate later discussions, this chapter first discusses passive and active building protection and introduces the committee’s definitions of levels of protection. Second, it reviews the options that could be used in building protection. Finally, it discusses how to integrate various protective measures to provide different levels of protection to buildings of different types and designs and considers the limitations of each level of protection.
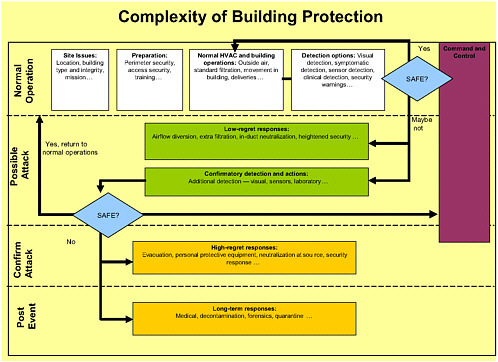
FIGURE 3-1 Illustration of the complexity of building protection (adapted from the Defense Advanced Research Projects Agency). This figure, which is not intended to be comprehensive, illustrates some of the activities and resources necessary for building protection. The flowchart does not show the different groups of threat agents and building activities that would determine the response and outcome.
BUILDING PROTECTION
Active and Passive Strategies for Protection
Incidents of terrorism that involve biological and chemical threat agents have raised awareness that buildings could be better protected from such attacks. The technologies and operational response plans currently used for building protection in most federal buildings (including military and nonmilitary structures within and outside the United States) and nonfederal buildings involve primarily “passive” approaches. Passive protection refers to systems that do not involve detectors or sensors of threat agents to influence an operational response. Passive protection utilizes the following:
-
The integrity of the building as a whole to protect occupants from external threats;
-
Compartmentalized spaces within the building that offer better protection from indoor releases through enhanced physical integrity of the space or from continuous local cleansing of the airstream; and
-
Visual recognition of threats and their effects—directly via video monitoring or indirectly from clinical signs of the occupants—to initiate protective response actions such as evacuation, sheltering in place, mass drug administration, or donning personal protective equipment. Automated video analysis can also be used to transition visual recognition from a passive to an active system.
Although passive systems can provide protection from a variety of threat agents and scenarios, they have gaps in protection that result in vulnerabilities. These vulnerabilities fall into two categories. First, occupants could be exposed to an unidentifiable threat that goes untreated and for which therapeutic options decrease with time. An example would be an indoor release of a biological threat agent with an incubation period of days. Second, occupants could be exposed to an unidentifiable threat that is fast-acting, such as a chemical threat agent, released inside the building space. (Note that passive measures could be used to protect occupants from outside release, but only some occupants could be protected from inside release through passive compartmentalization methods.)
These vulnerabilities and their variations could be addressed by an “active approach” to protection that uses detectors to recognize the presence of a threat agent. Once detected, the threat agent could then be identified and an operational response initiated to limit the threat and allow treatment of exposed occupants. Active building protection based on sensors and detectors is not currently in wide use within the Department of Defense (DOD, 2005) because of the high initial and maintenance costs and because the risk of biological or chemical attack is low in most buildings. Test beds and current deployments such as Nord Hall of the Immune Building Program and the Pentagon will provide a basis for considering the use of sensor-based active protection (see also Chapter 5).
Levels of Protection
Nearly all buildings offer some protection from an outside release by virtue of being enclosed by walls, roofs, and openings protected by doors and windows, which limit the transport of contaminated outdoor air indoors. Buildings are typically not designed or constructed to resist infiltration of outside air entirely. In fact, some leakage or infiltration is commonly assumed to provide “fresh air” in some buildings. (For example, no ducted fresh air from an air intake louver might be provided in some simple commercial buildings or single-family residences.) Similarly, buildings are not typically built with airtight interior construction or filtration effective against the kinds of particulates and chemicals of concern in this study. All buildings are subject to widely varying quality of design and construction and to varying quality of maintenance and repair over their lifetimes. Buildings are also subject to many changes over time from aging of materials, wear and tear from ordinary use, and renovations to accommodate evolving needs and new technology. The protective performance of most buildings, therefore, is not planned, monitored, or verified. Unless the building is carefully monitored and maintained, it is unlikely to provide the protection it did when it was new, and this is a major limitation of passive protection options.
The required level of building protection from biological and chemical attacks is determined by the use of the building and the possible threats (Chapter 2). The type of building protection that can be implemented depends on many factors including the life-cycle cost of the protection system, building type, and ease of access. The committee developed the concept of four levels of protection—low-level passive, high-level passive, low-level active, and high-level active—to facilitate discussion. The level of protection is based on vulnerabilities and risks to threat agents, and a system could provide different levels of protection for different agents; a given protection system could offer active and passive protection from some biological or chemical threat agents and only passive protection from others.
Like the biosafety levels (BSL-1 to BSL-4) for microbiological and biomedical laboratories (DHHS, 2007), the four levels of protection are qualitative. The science and application of building protection from biological and chemical threat agents is not nearly as mature as biosafety in laboratories. Even for biosafety in microbiological and biomedical laboratories, the guidelines promulgated by the Centers for Disease Control and Prevention in 1984 (DHHS, 1984) are still qualitative (DHHS, 2007). Because of the variability in threat, risk, building design, and operational use of the wide array of buildings in the DOD inventory, the committee could not suggest measurable and quantitative criteria for either design or function at the time this report was written. The four levels of protection represent a plan for considering building protection. Although most buildings are designed to decrease the impact of natural disasters and fire hazards and to provide some level of indoor air quality control, they are not designed to decrease the impact of biological and chemical attacks. Therefore, some buildings have no or little
protection—particularly the ones that are poorly maintained or highly porous to the outside environment. These buildings do not even reach the lowest level of protection described below.
-
Level of Protection 1 (LP-1)—Low-Level Passive Protection. Passive protection refers to protection without the capability of actively sensing the environment for the presence of threat agents. Low-level passive building protection is based on the demonstrated protection provided by a well-constructed, well-maintained building that provides a healthy environment for occupants and operations. A building designed to provide a high-quality environment during normal operation also provides some protection from external and internal threats (Hitchcock et al., 2006). In general, an LP-1 building meets or exceeds all requirements of consensus indoor air quality standards, such as the American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE) Standard 62.1, in terms of its design, construction, and operation (ASHRAE, 2004a). An LP-1 building has a well-sealed envelope to limit infiltration of outdoor air and any contaminants it might contain and to provide for minimal leakage of heating, ventilating, and air-conditioning (HVAC) air distribution to reduce unintended airflows inside the building. HVAC system types that inherently limit the spread of indoor contaminants are also LP-1 options. A sufficient supply of outside air to dilute contaminants and a moderate level of particulate filtration are also found in LP-1 buildings. Although most HVAC systems offer some degree of particle filtration, not all buildings have the high degree of filtration required for consideration as LP-1. Buildings usually do not contain adsorbents (for example, activated carbon) and absorbent filters (for example, air washers) as part of typical HVAC installations except in special circumstances. An LP-1 building has to be well maintained to ensure that protection is available when needed. The LP-1 options align with a recent study (Hitchcock et al., 2006) that recommends the above options as realistic protection of public buildings, eschewing more complex alternatives. Most DOD buildings and many public buildings have security and operational activities that are not intended for, but offer some protection from, biological and chemical airborne threats. These measures have dual-use advantages and are also part of the LP-1 options. An LP-1 building also contributes to the performance of protection systems that include sensors (that is, active protection as described below). Detectors have higher reliability and fewer false positives (a wrong indication that a threat agent is present) when operated in a clean environment provided by the LP-1 option.
-
Level of Protection 2 (LP-2)—High-Level Passive Protection. LP-2 provides protection by further limiting exposure to intentionally released threat agents, and it is similar to MilStd Class 1 collective protection (USACE, 1999). This level of protection involves options for reducing the vulnerability to threat agents that are not part of a “standard” building system. The protective measures in LP-2 are passive because they do not actively detect the presence of threat
-
agents (although the operational response plans could change from passive options to active response in some situations). LP-2 options include adding gas filtration and upgrading aerosol filters and other control technologies specific to biological and chemical threats, zoning the building interior with differential pressures, relocating outside air intakes and filtering outside air, and providing local air-washes (areas that are provided with isolated, enhanced laminar airflow with local filtration at the returns). Many protection options in LP-2 serve dual purposes because they improve the working environment and the building security.
-
Level of Protection 3 (LP-3)—Low-Level Active Protection. Active protection refers to protection with the capability of actively sensing the environment for the presence of threat agents. LP-3 offers low-level active protection and directly addresses one of the main vulnerabilities of passive systems (LP-1 and LP-2)—exposure of the building’s occupants to a threat agent that is not detected and identified in time to execute therapeutic responses. LP-3 is a “detect-to-treat” option that would allow identification of a threat agent in time for treatment. LP-3 requires a broad-spectrum detection and identification system that could determine the presence of a variety of known threats within the time period necessary for an operational response. The time for detection varies by threat agent; the threat requiring the longest detection time typically involves a biological agent. Because the LP-3 option detects and identifies the threat in time only to treat the people exposed, it might not be an appropriate option for facilities that require continuous operations. Some threat agents that escape detection could have a quick impact on facility operations.
-
Level of Protection 4 (LP-4)—High-Level Active Protection. LP-4 is a high-level active protection that addresses the second major vulnerability of the LP-1 to LP-3 approaches to building protection—the inability to mitigate an attack through timely detection. LP-4 would allow detection and identification early enough to treat the exposed victims and to make operational responses that might minimize the impact of the threat agent by preventing or limiting exposure. These operational responses might include high-regret options. (In this context, “regrets” are negative consequences of actions, as discussed in detail later in this chapter; see section titled “Operational Procedures for Protecting Buildings.”) The LP-4 option is considered to be at the edge of current detection and identification technology and ability to operationally deploy. Because of current limitations in detection and identification technologies, a successful LP-4 option requires tiered levels of detection and response and uses combinations of low-regret response options with fast, nonspecific detection systems. Box 3-1 summarizes the levels of protection and the options each level comprises.
LP-2 generally has all the virtues of LP-1 and some additional passive protection. LP-1 and LP-2 are usually part of active protection so that LP-3 and LP-4 generally have all the virtues of LP-1 and LP-2. However, LP-3 and LP-4 could
|
BOX 3-1 Levels of Building Protection from Biological and Chemical Airborne Releasesa LP-1: Low-Level Passive Protection
LP-2: High-Level Passive Protection (LP-1 + options specific to protection from biological and chemical threat agents)
|
be implemented without some of the basic options in LP-1 and LP-2. In general, active protection has fewer vulnerabilities, higher life-cycle costs, more complex operation, and higher risk of failure as a result of technological and operational complexity. In addition, the use of sensors also introduces the possibility of false positives and false negatives (no indication despite the presence of a threat) from the sensors. False positives are disruptive to operations and cannot be tolerated in many operational situations, so it is important to minimize false positive responses. False negatives when sensors are present could also provide an undesired sense of complacency compared to when sensors are not present (and there is also no indication of a threat).
The four levels of protection address different types of vulnerabilities. Figure 3-2 shows a cross-comparison of the levels of protection and the threat groups (selected on the basis of the ability to detect and treat the threat) they could address.
The “cannot detect, cannot treat” group (Group D) of threat agents poses the greatest challenge because of the inability to detect the threat. Including sensors
LP-3: Low-Level Active Protection
LP-4: High-Level Active Protection
|
(LP-3 and LP-4) does not enhance protection from these threat agents because the systems cannot detect them. Hence, LP-1 and LP-2—filtration without sensors— could enhance protection from the most challenging threat types. Although detection and identification technologies will improve in breadth, specificity, and response time and expand the opportunities for the LP-4 option, passive options will continue to play an important role in building protection.
STRATEGIES AND TOOLS FOR PROTECTION
Building Design and Planning Strategies
When the built environment is to be tasked to provide protection against airborne threat agents, generalized solutions must be considered with caution because no two buildings are exactly alike, even when they have been “standardized.” Unlike mass-produced appliances or automobiles, every building is custom built. Therefore, every building must be studied individually for ways to
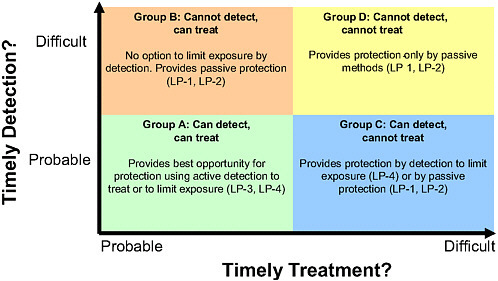
FIGURE 3-2 Illustration of how the four levels of protection (LP-1: low-level passive protection; LP-2: high-level passive protection; LP-3: low-level active protection; LP-4: high-level active protection) can be applied to the four groups of threat (A: can detect, can treat; B: cannot detect, can treat; C: can detect, cannot treat; D: cannot detect, cannot treat). In general, passive protection offers some protection from threat agents but might not be effective for all. Active protection aims to detect the threat agent in time to treat exposed victims (LP-3) or to limit exposure (LP-4).
mitigate airborne releases of threat agents. The design of a building is a product of response to functional program, climate, topography, geology, and aesthetic or iconic objectives.
In DOD facilities, the functions are classified in the Unified Facilities Criteria as billeting, primary gathering, or other DOD inhabited. In fact, these classifications might embrace everything from dwellings to offices to large armories, and more than one function could be housed within a single structure. The design responses will result in the spatial layout and selection of the structural system, HVAC, and other systems, including physical security.
Although test beds and laboratory-built spaces can be carefully controlled and ideal conditions can be achieved, field conditions for most buildings constructed for DOD and other clients vary widely from one project to another. Such variables as worker skills, false alarms due to background material, temperature and humidity conditions during construction, and materials from different manufacturers and lots can result in departures from the strict design intent and different performance characteristics for the building. If, for example, one of the mitigation strategies includes creating pressurized zones or compartments, great care must be taken to ensure that the field conditions result in airtight construction
because most building assemblies are quite porous. Even different contracting methods (design-bid-build, design-build, or multiple contracts) can affect the final building results.
Buildings also change over time: they are dynamic, not static, and respond to temperature, humidity, wear and tear of use, quality of maintenance, and impacts of renovations. Modern buildings with increasingly sophisticated technologies are more than ever subjected to changes as new technologies become available. Constant rewiring or re-piping of systems can compromise the integrity, for instance, of an originally airtight partition. Therefore, it is important that designers of threat mitigation methodologies for new or existing buildings consider the field conditions that can affect construction and the likely impact of time on the original design.
From its beginnings, the built environment has had shelter and protection of its inhabitants and their possessions from natural and human-made threats among its primary objectives. It is, then, within the tradition of building design to include some element of physical security. Design strategies of an architectural nature that could be useful in mitigating the effects of airborne contaminants, including biological or chemical threat agents, are passive and belong in the LP-1 and LP-2 categories. Furthermore, the passive strategies complement the active strategies in the LP-3 and LP-4 categories.
New Building Design
New buildings can be designed for physical security—including mitigation of airborne hazards—more readily and economically than retrofits to existing buildings, especially if the security needs are anticipated early in the pre-design and design phases and are identified in a threat and risk assessment. The physical security needs, including mitigation of any biological and chemical threat agents released, become part of the functional program, budget, and design brief.
Site Selection Considerations
Design for physical security begins with the selection of the building site. A well-chosen site with access control and adequate standoffs from uncontrolled neighboring sites and rights-of-way can save costs of mitigation. However, the cost of the land could offset the savings in construction in some markets. Site selection is, of course, limited to new projects. In deciding to construct a building, the following should be taken into account to the extent feasible to achieve LP-1 and LP-2:
-
Ideally, the site should be away from coastal regions subject to hurricanes and flooding, in order to minimize potential damage to the exterior envelope from winds. A damaged building envelope could affect the airtightness of the building and hence the protection from external airborne threats.
-
The site should be as remote as possible from major thoroughfares such as interstate highways, main railroad lines, or navigable waterways where hazardous agents (including toxic industrial chemicals and materials) could be transported and where accidental or deliberate releases could affect the site.
-
The site should be outside the landing and takeoff patterns of an airport to minimize exposure to aircraft accidents.
-
The site should be located away from a neighbor or community that is potentially a target of terrorism, such as an iconic federal installation or monument.
-
If the site is in a dense urban area, access to and from the site should be via streets that are not so congested that emergency responders cannot access the site quickly and evacuation cannot be effected promptly. Access from more than one street and from more than a single side of the site permits an alternative should the main access be blocked in an emergency.
-
The site should be remote from and upwind of hazardous manufacturing, processing, or storage of potential airborne contaminants and far enough from combustibles so that it would not be affected by fire or explosions on the neighboring property.
Site Planning Considerations
Once a site has been selected, the designer and owner have to consider the ease with which the building can be protected from threats by the site’s design. To achieve LP-2, the site perimeter can be controlled by topography such as steep slopes, berms, or ditches, or physical barriers such as walls or fences to prevent or impede access to the buildings from outside the site by unauthorized pedestrians or vehicles. Sufficient distance between buildings and uncontrolled areas outside the perimeter might be required to allow time for detection and interdiction of a threat—for example, a person approaching the building with intent to break and enter, explode a device, or introduce toxic chemicals into the building’s environment. The distance from an event at the perimeter, such as an accidental or deliberate release of a toxic substance into the air or an explosion, can mitigate the effect of the event on the occupants.
At least two alternative places on the site perimeter should be provided for access and evacuation, where possible. Because entrances are inherently attractive targets, if one entrance is the site of an event, emergency response and evacuation require an alternative. For similar reasons, there should be redundancy of utility services to the site. Water, power, communications, and other utilities should serve the site from more than one point. These points of service should be protected from illicit access and potential tampering.
Another protection option is to select a site large enough to allow adequate distances between uncontrolled and unscreened vehicles and the building(s). Adequate space will be needed at the site perimeter entrances for vehicle inspection, including queuing, turnaround, and screening. On-site, keeping screened vehicles
at safe distances from occupied buildings could minimize risk of impacts from an explosion or rapid intake of a discharge of toxic airborne substances, including exhaust fumes.
Fresh air intakes for buildings could be protected from unauthorized access or from accidental intake of noxious fumes, including exhaust from vehicles, by location on the building or protection with barriers.
Building Interior
The design of an HVAC system is important in building protection, but the planning and design of the building can provide many mitigating features. Limiting access points to the building to as few people as possible is one strategy to achieve LP-2. In this way, the flow of people into a building can be controlled by screening with personal inspections and sensing devices and monitored by security personnel. Access to the building could be limited and people’s whereabouts in the building could be monitored. Magnetic or proximity cards and unlocking devices are now familiar in many government and institutional applications. Unauthorized people are prevented from accessing protected areas; if an employee has brought a weapon or toxin into a building and passed screening, the notion that the person has been identified and his or her whereabouts have been recorded could deter some hostile actions. At a minimum, access should be controlled, and intrusion to the following areas that could be sensitive should be monitored:
-
Fan rooms
-
Mechanical equipment rooms
-
Electrical switchgear and emergency generator rooms
-
Telephone and data panel rooms
-
Filtration and pump rooms
-
Interstitial spaces
-
Biosafety laboratories 2, 3, and 4 and vivariums
-
Laboratories and other spaces using and storing select agents as defined in Title 42, CFR, Part 73, including pathogens and toxins regulated by the Department of Health and Human Services (DHHS) or the U.S. Department of Agriculture and non-overlap select agents of DHHS
-
Utility tunnels and meter rooms
-
Rooftops and penthouses
-
Areaways—especially if used for air intakes
-
Storage for bottled gases, liquids, flammables, pressurized containers, fuel tanks, and other hazardous products
-
Food storage
-
Pharmacies and pharmaceuticals storage
Air intake louvers are best located out of reach or access from the ground or other uncontrolled areas. Louvers should not be located where exhausts from vehicles or other sources can be drawn into the system.
To achieve LP-3 and LP-4, certain LP-1 and LP-2 measures should be in place. For example, access to a central analysis center and to filter and air handler rooms needs to be controlled. Vulnerable areas should be isolated. Arguably, the most likely areas in buildings from which toxic substances can be introduced to the building’s air are public entrance lobbies, mailrooms, and loading docks or receiving areas.
Isolation to mitigate impacts of toxic or airborne substances can be achieved physically by segregating or isolating spaces through barriers and mechanically by preventing air from such spaces being introduced to the rest of the building by recirculation. These areas are also potential sites for explosive events, so their isolation from the main building is good practice in the design of modern buildings potentially subject to hostile actions.
Threat agents can also be introduced surreptitiously anywhere in the building by someone (such as an employee) who has not been screened at the entrance. Further zoning a building to compartments served by dedicated air handlers and ductwork could minimize propagation of a threat agent in the airstream. It would also allow lockdown or physical isolation of a compartment in which a threat agent discharge is known to have occurred and allow safer evacuation of other areas. Negative pressurization of select spaces to contain contaminated air is a potential option, but care needs to be taken to avoid pressures that impair egress through doors swinging into the higher-pressure side, such as fire stairs in high-rise buildings.
Elevators, dumbwaiters, and escalators are a challenge to managing the migration of air from floor to floor. These vertical transportation devices should be placed in lobbies on each floor with automatically closing doors between the lobbies and the corridors to isolate the shafts from the rest of the floor. These are also requirements in many codes for fire and smoke control. Similarly, the ability to seal multistory atriums from the rest of the floors is essential, and codes often require them to be provided with smoke removal fans.
The porosity of modern building construction cannot be underestimated. The ability of ordinary construction to prevent air from migrating into the building, from one part of a building to another, and even into the building’s interstices is not sufficient to use as a basis for passive protection against migration of contaminants. The use of plenum distribution of air, especially underfloor plenums, is particularly vulnerable to easy contamination through leakage. In the event of contamination, cleanup of plenums is much more difficult than cleaning ductwork. Plenums are best to be avoided in the design of buildings that are potential targets for toxic contamination.
In buildings with such enhanced air protection as high-efficiency particulate air (HEPA) filters, adsorption units, ultraviolet germicidal irradiation (UVGI), and other devices, rooms for air-handling equipment must be sized to allow for the generally larger-than-normal equipment and access to filters for changing. Where sampling of internal air is done using tubes to one or more central
analysis centers, adequate space for running sampling tubes above ceilings and in vertical shafts must be provided with space for required bends. Service access panels must be strategically located and secured with locking hardware. Central analysis rooms must be located strategically for the areas served, and they must be adequately sized for the required sampling and analysis equipment.
Existing Buildings
Ideally, any of the measures for new buildings are suitable for existing buildings, but it could be impractical and costly to retrofit existing construction. Although site selection is not an option for an existing building, site organization and access design could improve protection of an existing building.
Relocating fresh air intakes might be possible, or existing intakes might be protected with barriers that permit the intake of air but protect against the introduction of threat agents directly into the air system. Changing air distribution and exhaust might be hindered by the unavailability of suitable plenum space above ceilings or shaft space in the building core. In addition, alternative air intakes or geographically disperse selectable intakes could be useful.
Probably the easiest protection to implement in existing buildings is access control and monitoring. Existing sites can be retrofitted for perimeter barriers and for vehicle and personnel screening at the perimeter where space and conditions allow. Other measures such as isolation of lobbies, mailrooms, and loading areas might be possible on a case-by-case basis. Wherever mitigation depends on preventing air migration from one area to another, testing and inspection of existing construction are necessary to identify inevitable leakage so that corrective action can be taken.
Heating, Ventilating, and Air-Conditioning Systems
HVAC systems are designed to provide conditioned air to the various spaces in a building in order to satisfy demands for heating, cooling, humidification, dehumidification, and contaminant removal. Consequently, such systems also represent a serious vulnerability to biological and chemical attacks in most buildings because they can function as a point of entry and distribution system for threat agents throughout a building.
The extent to which an HVAC system mitigates or exacerbates a threat agent release depends on the system’s characteristics, the architectural characteristics of the building in which it is installed, and the characteristics of the release. When designing a new building or renovating an existing one, the architect and mechanical engineer have the opportunity to collaborate to reduce the vulnerability of HVAC systems to biological and chemical attacks. Alternatives for retrofitting existing systems are generally much more limited by space, operational considerations, and cost.
Recirculation Versus Once-Through Airflow
A key distinguishing feature of an HVAC system is whether or when it recirculates a portion of the air removed from conditioned spaces or exhausts all of it. Once-through systems typically provide 100 percent outside air to spaces at rates selected to meet ventilation requirements. These requirements could be as low as 10 to 20 percent of the flow rate associated with a recirculating all-air system. To satisfy heating and cooling loads at the reduced flow rate, unitary or hydronic terminals such as heat pumps, fan coils, or radiant panels might be needed.
Contaminants released indoors in one space served by a recirculating system could be redistributed rapidly to all spaces connected to the same system. The distribution of contaminants released in one space to other spaces is much more limited in a once-through system. However, pressure differences created by wind, stack effect, and HVAC fan operation can cause flows between what, in theory, are isolated spaces.
The once-through airflow system supports and complements the concept of architectural compartmentalization. However, recirculating systems can incorporate centralized air cleaners to remove contaminants collected from within a building, whereas once-through systems cannot, which makes them more vulnerable to external releases. The use of local air cleaning systems in conjunction with once-through ventilation could be necessary to provide the same degree of protection in a space once it has been contaminated. This risk needs to be weighed against overall reduction in risk as a result of more localized and slower distribution of contaminants than would occur in a recirculating system. With respect to security, the choice of a once-through ventilation system is an LP-1 measure.
Air Supply and Return Systems
In most HVAC systems, air is delivered to conditioned spaces through overhead diffusers served by a network of ducts emanating from a central air-handling unit (AHU). Unless a contaminant is distributed initially from the AHU, it can recirculate or spread only as the result of leakage to other zones. An increasingly popular alternative to ducted overhead distribution is the underfloor air distribution (UFAD) system. UFAD systems distribute air through diffusers in the floor connected to an underfloor supply plenum. The supply plenum of a UFAD system represents a greater vulnerability because the common supply could serve large areas of a building and because air from a pressurized supply plenum can leak into wall cavities and through floors to spaces below.
UFAD systems have the potential to produce better indoor air quality in buildings during normal operation (Bauman, 2003), but they could be more vulnerable to indoor biological and chemical attacks than conventional ducted air distribution systems. One of the claimed advantages of UFAD is that it supplies clean air to displace normal indoor contaminants (such as bioeffluent and emissions of
office equipment) upward, out of the occupied zone. From the perspective of a biological or chemical attack, it is easy to surreptitiously introduce a dissemination device into one of the numerous floor diffusers located in uncontrolled space. The threat agent could then be distributed into a large occupied zone effectively without passing though any filters or other control devices.
Return systems could also be ducted or plenum type. Ducted returns, like ducted supplies, tend to reduce cross-contamination. Plenum returns allow return air from multiple spaces to mix, which can distribute contaminants throughout a building even following a point release and even when ducted supply is used. Return systems also could be of the ducted or plenum type. Ducted returns, like ducted supplies, tend to reduce cross-contamination. Contaminants entering a return plenum from one space could enter other spaces directly because of pressure gradients within the building or when fan-powered variable air volume boxes (which recirculate air from the plenum into occupied spaces) are used. Similarly, contaminants leaking from positively pressurized supply ductwork into a return plenum could be widely distributed. Design to eliminate supply plenums is typically an LP-1 measure.
Outside Air Supply Systems
Most large buildings are required by code to take in and distribute outside air to dilute indoor contaminants for the purpose of maintaining acceptable indoor air quality (an LP-1 option). Also, by bringing in more outside air than is exhausted by the HVAC system or other exhaust fans in the building, the interior as a whole can be positively pressurized relative to the outdoors (an LP-1 or LP-2 option). Positive pressure inside the building is beneficial in case of an outdoor release when the supply air has been properly filtered against biological or chemical agents. Relative to the supply air quantity provided by all-air recirculating HVAC systems, outside airflow is generally small. However, all-air HVAC systems frequently are configured with “economizer” controls that permit the outside air intake to be increased up to 100 percent of the supply airflow when outdoor conditions are such (relatively cool, dry air that can offset mechanical cooling) that doing so would reduce the energy consumption of the system. Some buildings also have “dynamic” or “demand-controlled” ventilation systems that adjust the outside airflow based on an indication of building occupancy, such as indoor carbon dioxide concentration.
The operational mode of the HVAC system needs to be taken into consideration when evaluating vulnerability to outdoor releases. Under some conditions, economizer controls increase outside airflow to 100 percent, which could be four or five times the minimum required for ventilation. The consequences of an outdoor release when an economizer operates the system at 100 percent outside air could be much worse than when the same system experiences the same release while in minimum outside air mode. If coordinated properly with event detection,
however, the ability to bring in large quantities of outside air to dilute indoor contaminants rapidly has protective value.
Outside air controls intended to establish an operating mode that would mitigate the effects of a release are an LP-2 option if the threat agent is detected by observation and response is initiated by a human; they are an LP-3 option if the threat agent is detected by sensors only in time to treat victims and response is initiated by a human; or they are an LP-4 option when the threat agent is detected by sensors and rapid response is automated.
The location of outside air intakes has been discussed in guidance on security design of buildings (NIOSH, 2003). It has generally been recommended that intakes be located high enough that a hostile person at ground level cannot introduce a biological or chemical threat agent with reasonably available means. Although proper location of air intakes can provide a certain level of protection, it contributes little to mitigating the consequences of a large-scale release, such as the rupture of a railroad tank car containing a toxic chemical or a release from an aircraft. To protect against such possibilities, outside air supply protection in the form of tight shutoff dampers—and, possibly, alternative outside air supplies or filtered outside air supplies—might be needed. The location of outside air intakes in secure locations is an LP-2 measure. Shutoff controls are part of a high-level passive response (LP-2) if the system does not include sensor technologies and a human initiates the response; a low-level active response (LP-3) if the system includes sensor technologies but the shutoff response requires a human in the loop or identification is relatively slow; and a high-level active response (LP-4) if response is linked to sensor technologies and is rapid and automated.
Air Cleaning Systems
Particulate Filtration
Filtration can facilitate removal of airborne biological particles from air as it enters a building or is circulated within a building (ASHRAE, 2004b). Key factors in determining the effectiveness of filtration include the method for capture of the return air, leakage from the building envelope, and the efficacy of the ventilation system (Hitchcock et al., 2006). The parameters affecting filtration include the size of airborne particles; the shape, electrical charge, and mass of the particles; and their concentration. Aerodynamic particle size is the most important of these parameters when utilizing filtration for particle removal (ASHRAE, 2001). Aerodynamic particle size accounts for physical size, shape, and density. Particles with a diameter greater than 2.5 µm are classified as coarse mode, while particles with a diameter less than 2.5 µm are classified as fine mode (ASHRAE, 2004b). These two modes have different control strategies. Fine-mode particles, including bacterial cells and aggregates of virus particles, are less likely to settle out of the air by gravitational settling than coarse-mode particles. Thus, the latter remain airborne for shorter periods of time. Combinations of filtration and
ventilation can be used to minimize the presence of fine-mode and coarse-mode aerosols in indoor environments.
Filtration Mechanisms. There are five main mechanisms of filtration to remove particles from the air as described by ASHRAE: straining, inertial impingement, interception, diffusion, and electrostatic effects (ASHRAE, 2004b). The same mechanisms also could be used for sample collection for further analysis. The coarsest filtration is straining as particles are removed from the air by size exclusion; particles larger than the opening are retained. Impingement occurs when a particle is either too large or dense to follow the airstream around a fiber, lands on the surface, and is retained due to attraction. Impingement could occur in flat-panel and minimal-media-area filters. If there are high air velocities, the particles might not be retained because of particle bounce, unless an attractive coating is applied to the fiber material surface. Surface coatings are critical to impingement filter performance. Bag and deep-pleated filters rely on interception, which is the attraction of van der Waals forces, and require low air velocities so as not to dislodge particles that have contacted filter fibers. Erratic and random pathways of very small particles within the airstream that result from Brownian motion bring particles close to filter media for interception. As increasing numbers of particles are retained, a concentration gradient forms, and filtration is enhanced by a combination of interception and diffusion. The efficiency of this mechanism increases with decreasing particle size and velocities. Microorganisms generally are net negatively charged and are attracted to positively charged filter media. Electrostatic charge enhances the attraction of biological particles to filter media. Filters generally become more efficient as their surfaces become loaded with particles. Particle loading, however, could reduce airflow through the filter if ventilation fans cannot overcome the additional pressure drop caused by the captured material (Hinds, 1999).
Filter Efficiency, Resistance, and Dust-Holding Capacity. Efficiency is defined as the fraction of particles removed from an airstream. The differential drop in static pressure across the filter at a given face velocity is defined as the resistance to airflow, and the dust-holding capacity is the amount of dust that an air cleaner can retain when it is operated at a specific airflow rate to a maximum resistance value. The interdependence of these relationships is evaluated in a variety of test methods for filters. Most commonly used are the ASHRAE Standard 52.1 (ASHRAE, 1992), which defines the arrestance test, dust-spot efficiency test, and dust-holding capacity test; the ASHRAE Standard 52.2 (ASHRAE, 1999), which assigns ratings on the basis of removal of particles in specific size ranges; and various tests specific to HEPA and ultralow-penetration air filters. The synthetic dust arrestance test (ASHRAE, 1992) uses an ASHRAE synthetic dust standardized to consist of various particle sizes and types that is introduced into the test airstream. It applies mainly to low-efficiency filters that primarily remove large
particles. The dust-spot efficiency test is based on the opacity change of a filter medium as it collects atmospheric dust (ASHRAE, 1992). It is more indicative of performance relative to smaller particles. However, neither an arrestance nor a dust-spot efficiency rating specifies performance for specific particle sizes. The newer minimum efficiency reporting value (MERV) rating of filters (ASHRAE, 1999) ranges from 1 to 20 (Hitchcock et al., 2006). Higher MERV values generally indicate higher efficiency, especially for smaller particles (see ASHRAE, 2004b).
Disposable pleated filters with a MERV rating of 8 demonstrate a 30 to 35 percent dust-spot efficiency and more than 90 percent arrestance for particles of 3–10 µm, while bag filters with a MERV rating of 12 are rated at 70 to 75 percent dust-spot efficiency and an arrestance of more than 95 percent for particles of 1–3 µm. Bag filters with MERV ratings of 13–16 demonstrate effective filtration of 0.3 to 1 µm particles and should capture 95 percent of Bacillus anthracis spores. Filters rated MERV 15–16 should capture 98 percent of Mycobacterium tuberculosis bacilli, 68 percent or more of smallpox virus, and 71 percent or more of influenza virus. Although MERV rating is not standard for HEPA filters, these filters range from MERV 17–20 for filtration of particles less than or equal to 0.3 µm (Hitchcock et al., 2006), thereby providing increased capture of viruses. Low-MERV-rated filters are often used as pre-filters in series with MERV filters rated 13 or higher. The majority of commercial buildings use filters ranging from MERV 5 to MERV 8 (Hitchcock et al., 2006). The use of pre-filters increases filter efficiency and prolongs the useful life of the higher and more expensive MERV-rated filters.1
The ASHRAE atmospheric dust-spot efficiency evaluation was used for high-efficiency filters (ASHRAE, 2004b), but it has been superseded or is used to complement ASHRAE 52.2 MERV ratings. The value of the dust-spot rating is based on the coloration of filter paper by ambient dust and is limited for particles in the micrometer and smaller size range. The dust-spot method incorporates the use of unconditioned atmospheric air passed through the test material. Discoloration of the air downstream is compared to upstream (unfiltered) air. ASHRAE 50 to 70 percent dust-spot efficiency filters are reported to remove 50 to 80 percent of particles 1–3 µm in diameter (ASHRAE, 1999), and ASHRAE 60 percent dust-spot filters are reported to remove 85 percent of particles 2.5 µm in diameter (ASHRAE, 2004b). The increased filter rating of 80 to 85 percent dust-spot efficiency results in removal of 96 percent of particles that are 2.5 µm in diameter.
The fractional efficiency or penetration method utilizes the introduction of uniform-sized particles into an air cleaner and measurement by an optical particle
counter, photometer, or condensation nuclei counter. The method provides accurate efficiency measurements but is time consuming and is primarily a research method. The penetration method that uses dioctyl phthalate smoke (USACE, 1999) or other aerosols (IES, 1992) to test high-efficiency filters (HEPA filters) is sensitive to mass median diameter and is commonly referred to as the efficiency of the filters with 0.3-µm particles (NAFA, 2004).2 The efficiency of HEPA filters is high (99.97 or 99.99 percent), resulting in reporting of penetration values, not efficiency.
Polydispersed aerosols are used for the efficiency-by-particle size method. Upstream and downstream measurements are made using optical particle counting devices at a variety of flow rates. The dust-holding capacity of a filter is a measurement of the synthetic dust loaded onto a filter under established procedures and a measurement of the pressure drop as the loading increases.
Proper maintenance and replacement of filters is needed when a specified pressure drop across the filters is reached and at recommended intervals. Bypass of filters occurs when gaps are present around the filter material and there are channels within the filter matrix that sharply reduce filter efficiency. The higher the MERV rating, the more attention is required to ensure proper installation and maintenance of filters (Hitchcock et al., 2006).
Gas-Phase Air Cleaning
Sorbent filters remove gas-phase air contaminants using either physical adsorption or chemical sorption. Physical adsorption results from the electrostatic interaction between a molecule of gas or vapor and a surface (NIOSH, 2003), and chemical sorption results from the reaction between a molecule of gas or vapor and a solid sorbent or reactive agents impregnated in the sorbent material. A variety of sorbents are available for different applications, and they vary in their abilities to remove different chemicals.
Sorbent filters have several limitations. First, a sorbent filter could preferentially remove some chemicals in a mixture and allow other contaminants to pass through. Second, most sorbents do not perform as well under high humidity (for example, silica gel adsorbs water in preference to hydrocarbons, so that the adsorption of hydrocarbons is essentially blocked by water vapor). Third, adsorbent impregnation could lose reactivity over time, but determining when and to what extent this occurs is difficult. Fourth, sorbent filters are bulky, heavy, and expensive compared to particulate filters. Consequently, while particulate filtration is extremely common in buildings of all types and required by codes and standards, gas-phase filtration is uncommon in most buildings.
|
2 |
It should be noted that the use of dioctyl phthalate smoke to test high-efficiency filters is no longer used in field certification tests due to hazards. Poly alpha olefin is used instead. For more information, see http://www.bnl.gov/esh/shsd/SOP/pdf/IH_SOPS/IH62300.pdf. |
Filter Placement
There are numerous potential locations for filters in an HVAC system. The most common filter placement location is in the mixed airstream within an air-handling unit. Using that location results in filtration of both outside air and return air, and it protects coils and other downstream components from fouling. Filters could also be located directly in the outside airstream, at supply to individual spaces, on the return from individual spaces, in the common return, and on exhaust air (if there is concern about the consequences of contaminated exhaust). Stand-alone filtration devices that recirculate and clean air within a single zone might also be desirable.
In general, decisions about where to place filters could be based on concern about how placement would impact normal operations, maintenance, first-cost and operation and maintenance costs, and space. In many cases, accommodating the large pressure drops required by some particle and gas-phase filters is a major consideration. In the context of a discussion of protection against chemical and biological agents, effectiveness during extreme events is a high priority.
Most HVAC systems require a minimal level of defined filtration (ASHRAE, 2004a) and MERV 6, as rated by ASHRAE Standard 52.2 (ASHRAE, 1999). Filters of this performance level primarily remove larger particulate matter that could cause fouling of HVAC components and soiling of building surfaces (an LP-1 option). To a lesser extent, such filters also remove particles in the size range associated with biological threat agents. Highly efficient filtration of biological threat agents requires filters above the performance levels generally prescribed in most buildings (an LP-2 option). Specification of more efficient filters frequently increases the pressure drop through the filter bank, which results in the consumption of more fan energy. Because it is the norm to provide particulate filtration sections in AHUs, upgrading filter efficiency as part of a security retrofit is possible if existing fans and distribution systems can provide required flows under the new system operating conditions. Most buildings under LP-1 do not employ gas- and vapor-phase absorption of any kind. Such systems are bulky, expensive, and of uncertain reliability in most applications. The continuous use of such systems is an LP-2 option.
Energetic Air Treatment Methods
Other options for controlling airborne threats include a variety of “energetic” methods that use various wavelengths of ultraviolet radiation (UVC, 200–280 nm; UVB, 280–315 nm), possibly in conjunction with other air treatment modes. UVGI (primarily UVC) can be used within AHUs to irradiate airstreams and coil and filter surfaces. When UV lamps are installed in occupied spaces, they are designed to create an irradiated cavity above the occupied zone that treats contaminants that are carried into it by air currents or to decontaminate exhaust airstreams. The effectiveness of UV as a germicide varies greatly from vegetative bacteria to spores, but it could provide the best cost-benefit when it is combined
with particulate filtration (see EPA, 2006, for more information). Ultraviolet radiation is also used to energize a titanium dioxide catalyst in photocatalytic oxidation (PCO) systems. It is also combined in some cases with hydrogen peroxide or with particulate filtration equipment. Like gas phase filtration, UVGI and other energetic methods are infrequently used in private sector buildings as an LP-1 option, but the market for such equipment is growing. Enhanced air treatment of all kinds is increasing in application because of a desire to provide better indoor air quality and security from biological and chemical attacks and infectious diseases. Enhanced particulate filtration and the addition of continuous operation gas-phase filtration or adsorption or energetic biological air treatment are generally LP-2 measures. Specialized air treatment and sensing and controls for on-demand use are LP-4 options.
Instrumentation and Controls
HVAC system controls are an important part of any building protection system. Controls range from global enable or disable functions to outside air (ventilation) controls and pressurization controls interlocked with fire protection systems to isolate smoke-filled areas and protect egress paths and refuge areas. Actuation of systems could be by human intervention and judgment (LP-2 option for intentional threats) or could be automatically controlled by logic on the basis of information obtained by sensors distributed throughout a building (LP-3 or LP-4 capability). For critical functions such as smoke control or response to a biological or chemical attack, appropriately located sensors, their reliability, and the rapidity and effectiveness of response are critical. The current capabilities and limitations of sensors systems for detection and identification are discussed later in this chapter and in other reports (NRC, 2003a, 2005b).
Active protection strategies such as those considered as part of the Defense Advanced Research Project Agency’s (DARPA’s) Immune Building Program and in LP-3 and LP-4 depend heavily on reliable sensor networks combined with effective mitigation technologies embedded in responsive HVAC systems (W. Bryden, DARPA, presentation to the committee, September 28, 2006). It has been demonstrated that when time and budgetary constraints are eliminated, the ideals of that program can be realized to some extent with humans-in-the-loop deployment, if not fully automated. However, the life-cycle cost of such systems and the maintenance required to keep them fully operational are substantial.
HVAC Zoning
The earlier discussion of architectural design focused attention on the potential value of compartmentalization. However, the ability of HVAC airflows to distribute contaminants throughout a building, particularly when the system recirculates return air, is far greater than the ability of architectural barriers to retard
them. Consequently, architectural compartmentalization should be coordinated with its counterpart HVAC zoning.
The term “zone” has a variety of meanings relative to HVAC system design. A zone could be a thermal zone, such as an area whose temperature is controlled by a single thermostat. A thermal zone could include a number of physical zones (such as rooms) or could be a subset of a physical zone (such as the core area of an open-plan office space). Similarly, a pressurization zone is an area maintained at a uniform pressure that could be a single physical zone or a group of physical zones. A zone also could be defined as the area served by a single AHU. Decisions regarding how to divide a building into thermal zones are based on the balance between comfort (individual control) and cost. Decisions regarding how many separate air-handling systems to use can be made on the basis of functional subdivisions of a building, energy use considerations, or building size. Small buildings could have a single air handler, while very large buildings could have dozens of systems serving small fractions of the total floor space.
Thermal zoning, in general, has no direct relevance to building protection. Pressurization zoning to control the direction of contaminant migration is an LP-2 measure. System-level zoning serves a protective function by limiting the extent to which any single system can contaminate a building (LP-1 and LP-2 options). At one extreme, an entire building might be served by a single all-air system with recirculation, in which case a threat agent released in one space would be distributed throughout the building in a matter of minutes. (The typical all-air system circulates a volume equal to the building volume roughly every 10 minutes, and the time for contaminated air to return to the AHU and begin reaching other spaces is much shorter.) At the other extreme, every space within a building could be served by its own independent system, in which case a localized threat agent release might have little global effect on a building or its occupants.
Places of refuge and isolated zones, such as mailrooms, and active airflow control strategies can be viewed conceptually as specialized applications of architectural and HVAC zoning principles. Although the subdivision of a building into many separate systems seems to have few negative aspects, the independent systems interact with one another. Improper operation could result in unintended consequences. For example, in a building with multiple variable air volume systems, controls might be set up to maintain the area served by one system at a positive pressure relative to that served by another under conditions of design airflow. However, because the airflow required by each system varies with its heating and cooling loads and each must be met independently, it is impossible to maintain the desired relationship under all operating conditions.
At the simplest level (for example, dividing up a building into many areas served by separate systems), zoning is an LP-1 or LP-2 design strategy. The use of fixed pressurization schemes to maintain the desired flow pattern in a building is an LP-2 strategy. The creation of places of refuge is part of an LP-2 strategy if an operational plan is in place for a human to activate air treatment for the
shelter; an LP-3 strategy if a threat agent is detected by sensors to enable treatment and response initiated by humans; or an LP-4 strategy if the threat agent is rapidly detected by sensors for protection, which in turn activates air treatment in the shelter.
Importance of HVAC Installation and Maintenance
Building systems, including HVAC systems, cannot function as intended unless they are properly maintained. Maintenance includes such actions as sensor calibration, testing and replacement of air cleaners, balancing of system airflows, and many other functions. Emergency operating modes need to be tested and confirmed on a periodic basis to ensure that they will function properly when called upon. The consequences of a threat agent release and the actions needed to mitigate those consequence depend on the extent to which airflows actually occur within a building and the extent to which its HVAC system differs from the system intended by the designer. For particulate air contaminants, a primary failure mode is improper installation of filters in their filter banks. Missing filters, replacement filters of the wrong dimensions that leave gaps through which large bypass flows could occur, or damaged media have been found in HVAC systems of many facilities (Braun, 1986; Ottney, 1993). Given that many building systems suffer from the consequences of infrequent or improper maintenance, the institution of a rigorous, comprehensive, and verified maintenance program could be considered an LP-1 security measure.
Building-HVAC Interactions
The effectiveness of HVAC systems in maintaining comfortable indoor conditions and in functioning properly during extreme events is tied closely to interactions with the building itself. Interactions between the building and its HVAC systems and between the building and the environment introduce a significant element of uncertainty into the prediction of air and contaminant movement. The leakiness of the building envelope and of interior partitions and floors determines the extent to which environmental impacts such as wind and indoor-outdoor temperature differences will influence indoor airflows and background aerosol conditions. Efforts to use HVAC airflows to pressurize the interior of the building are less likely to be successful when the envelope is leaky. If the envelope is sufficiently porous that it permits inflow of air from outdoors, the envelope itself could become a point of entry for contaminants released outdoors. Contaminants entering through the envelope and bypassing filters greatly reduce the beneficial impact of enhanced filtration. The use of greater care than is usually exercised in constructing and sealing the exterior envelope of a building is an LP-1 measure. Interior sealing for the purpose of facilitating zonal pressurization or reduction of interzonal airflow is an LP-2 strategy.
Detection and Identification Technologies and Associated Protection Options
An active approach to building protection (LP-3 and LP-4) requires a detection system that includes components capable of detecting the presence of threat agents and identifying them so that treatment can be administered and appropriate operational responses effected. The detection and identification system could include nonspecific triggers that initiate sample collection, turn on more specific identification technologies, or initiate low-regret responses. In tiered protection systems, the increased sampling and possible confirmatory detection would initiate higher-regret responses.
Sampling Systems
Sampling systems are the first stage in most biological and chemical agent identification systems. The basic components of a sampling system are collecting the sample, transporting the sample, filtering the sample (for example, aerosol samples are filtered to remove unwanted larger particles and debris), and concentrating the sample. The efficiency of the sampling system and sampling time needs to be considered when designing biological and chemical threat agent identification systems.
Sampling Locations and Backgrounds
Sampling for building protection can be done outdoors or indoors. Outdoor sampling is used to detect external releases, and indoor sampling is preferred for the detection of indoor releases but can also be used to detect outdoor releases. One of the challenges of detection and identification technologies is the complication of normal or intermittent background levels that can interfere with the desired measurement, either by causing incorrect signals (false positives) or by making the detector inoperable (false negatives) (NRC, 2003a, 2005b). Although there are no background concentrations of chemical threat agents, there could be low levels of certain toxic industrial chemicals (TICs) or toxic industrial materials (TIMs) in buildings; the background level of TICs or TIMs would likely be localized to situations where they are being manufactured, shipped, or used. Some current commercial off-the-shelf chemical sensors could give false alarms when they are exposed to some of the chemicals used in buildings. Natural nonpathogenic bioaerosol backgrounds are complex and vary with time and location.
Natural outdoor bioaerosol backgrounds come from a wide range of sources such as viruses, bacteria, fungi, and plants (Merill et al., 2006). Pollens from plants vary seasonally and diurnally and can sometimes result in visible clouds with more than 10,000 particles per liter of air. Weather patterns such as rain and wind also impact outdoor bioaerosol particle concentration.
Indoor bioaerosol backgrounds also come from a wide range of sources including viruses, bacteria, algae, plants, insects, animals (for example, skin
scales), and fungi. Particulates in indoor air can increase greatly with foot traffic on carpets and during cleaning activities using buffers and other high-energy appliances. Outdoor bioaerosol concentrations will strongly affect the indoor air if the building includes outdoor and indoor ventilation (for example, open windows). Indoor bioaerosol backgrounds can be reduced dramatically by filtering air and decreasing the indoor and outdoor aerosol leakage of the building. In addition, decreasing the sources of bioaerosols within a building can reduce the indoor bioaerosol background dramatically, which in turn reduces failure modes of detection systems. Because bioaerosol background can vary dramatically from building to building, it has to be considered in designing a biodetection system.
Understanding the background as measured by the biodetector(s) within the biodetection system (such as particle concentration or size, ultraviolet laser-induced fluorescence [UV-LIF], and antibody-based detection) is critical. The background measured by the biodetector includes a combination of both bioaerosol background and detector interferents (aerosols that “look” like bioaerosols to the detector). To design an effective biodetection and identification system, it is critical to characterize the background using the same mechanism as the detectors within the bioanalysis system. Test beds, field studies, and deployments can be used for characterizing biodetectors under relevant operational conditions.
Transport to Detectors
Indoor sampling locations can be in rooms, hallways, or the building ductwork. When only a few detectors are used in a facility, they are often located in the ductwork at locations that provide the broadest building coverage. If the sample is taken within the ductwork, understanding airflow in the building is important to determine the time for transport of aerosols or vapors from the room, through the ductwork, to the sampler.
Sampling tubes can also be used to collect air from rooms and transport the air to one or more centrally located detectors and collection systems, thereby minimizing the number of sensing systems. When sampling tubes are used, improper design can result in substantial losses due to sorption of vapors and impaction of aerosols within the sampling tube. Important factors to consider are the tubing material, diameter, length, and geometry. Sharp bends in the sampling tube are best avoided to minimize loss during transport. Software programs are available to estimate transport losses as a function of sampling geometry and aerosol particle size (larger particles are more difficult to transport). In addition to losses within the sampling tube, the sampling time lag as a result of transport through a sampling tube has to be considered when designing a detection system.
Particle Size Considerations
Bioaerosols (and also aerosols containing chemicals) have a broad range of sizes from 1 to 100 µm; however, sampling has traditionally focused on aerosol particles in the size range of 1 to 10 µm. Particles significantly larger than 10 µm do not efficiently deposit in the lungs (alveoli), although particles as large as
100 µm can still be inspired and trapped in the nasal passages. Particles much larger than 30 µm are difficult to transport and sample efficiently because they rapidly settle and deposit on surfaces. However, because the number of individual biological organisms contained within a bioaerosol particle can increase with the cube of the diameter of the particle, larger aerosols can contain many organisms and provide sufficient sample for more sensitive detection and identification systems (for example, nucleic acid-based detection). Consequently, considerations of the complete detection and identification system, of the uncertainty of preparation of a threat agent, and of the backgrounds might result in an optimum range of particle sizes for sampling beyond the standard 1- to 10-µm range.
Aerosol Size Selection, Concentration, and Collection
Aerosol can be separated by size using devices such as cyclones, classical impactors, virtual impactors, and filters before detection. These same components can also be used for aerosol concentration and collection as described below. Other methods involving electrostatic and ultrasonic effects are being investigated for aerosol concentration and separation, but these methods are less developed and are not available for near-term deployment.
Cyclones use vortex flow to remove unwanted large particle debris from the aerosol. Ideally, a cyclone collection curve would be a step function, with particles larger than the cutoff collected and particles smaller than the cutoff passing through the cyclone. In practice, the size distribution of the collected particles has a sigmoidal shape. Increasing the size cutoff at the same flow rate will increase the physical size required for the cyclone separator. Cyclones with wetted walls can be used for the collection and concentration of aerosols into a liquid. In this case, the particles in the larger size fraction are collected into a liquid moving on the wall of the cyclone.
Impactors accelerate the particles in a jet toward a surface (classical impactors) or toward a nozzle (virtual impactors). Both approaches can be used to remove large particles from the sample airstream and typically have steeper sigmoidal cutoff curves than cyclone separators. The remaining particles can then be collected using a filter, cyclone, or impaction onto a surface or into a liquid. Classical impactors are compact but need to be cleaned frequently. Virtual impactors reduce the cleaning problem but are more expensive to build than classical impactors. Impactors have been configured to collect particles of 0.1 to greater than 10 µm with reasonable efficiency.
Filtration is used to collect all particles and is the most commonly used method when collection is done periodically (for example, over hours or days). Analysis of aerosols collected on filters requires rinsing or other methods to remove the particles from the filter. Although filtration can be very effective in collecting particles, the collected particles are not suitable for all types of analysis. For example, vegetative cells often dry out on filters, so viable organisms cannot be cultured from the filter. In addition, it takes time and different reagents
to remove particles from filters for analysis. The analysis of filters has been used for detect-to-treat (LP-3) applications that do not require rapid detection.
Detection and Identification Systems
DOD has separate operational definitions for detection and identification. Detection systems detect a change in the environment that is consistent with the presence of a harmful chemical, protein, or biological agent. These systems cannot distinguish between the harmful and harmless varieties of chemicals, proteins, and organisms. In contrast, identification technologies measure specific parameters that are unique for the target chemical, protein, or biological agent. Ideally, identification technologies distinguish between harmful and harmless varieties of agents.
Many types of technologies can be employed for detection, identification, and protection against a deliberate agent release. Some systems are large, laboratory-based instruments; others are small and portable. Different approaches have their advantages and limitations. This section discusses both existing capabilities and prospects for technologies that should become available in the near future. For building protection using LP-4, rapid detection and identification of an agent release is essential. Rapid response time is required to protect occupants from exposure and to minimize the distribution and dissemination of an agent throughout the building, thereby limiting the number of exposed individuals. Detection systems for LP-3 do not require as rapid a response time for most threat agents and can use slower, but more specific and accurate identification methods.
There are two strategies for detecting and identifying agents: periodic and continuous. In periodic strategies, a discrete sample is taken at a point in time or over an interval of time and analyzed for the presence or absence of an agent. Sampling frequency is dictated by the sensitivity of the measurement (for example, collecting an adequate amount of sample for analysis could take a long time), the time needed to protect building occupants, the time for transport from the sampling location to the detector, and the time it takes to run a sample through the detector or identifier. Many analytical instruments could take several minutes to hours to make a measurement. Clearly, if the duration of detection or identification is longer than a few minutes, it is too long, and it is thus inappropriate for detecting a release and warning building occupants (LP-4). For LP-3, such a system would provide the ability to treat individuals exposed to biological agents before clinical signs appear.
Generally, detectors are used for continuous monitoring and can be placed directly at the point(s) of interest. Physical monitors detect such parameters as particle count, pressure, temperature, and light intensity, whereas biological and chemical identification systems detect the presence of specific biological and chemical analytes.
Many limitations to detection and identification of threats exist. For biologi-
cal threat agents, the background level of interferents (nonthreatening biological agents that could alarm broad spectrum detectors) is often high and varies over time. Interferents could make distinguishing between an intentional release of a threat agent and variations in normal background difficult, unless the release occurs close to a detector. Even when a threat agent is detected, rapid identification of specific biological agents is difficult. The added benefit of rapid identification of biological agents would allow administrators to more efficiently mitigate the threat and prepare treatment options for exposed people. For chemical agents, rapid detection and identification is less difficult. Sensors and sensor systems that detect and identify chemical agents currently exist; however, they differ in levels of specificity and could have problems distinguishing between the threat agent and the background measured by the sensor at the location of interest. The background signal can arise from scattered photons (in optical detectors) and inherent sensor system noise or from interferent chemicals at the location of interest.
The inability to identify a previously uncharacterized agent with unknown properties is an enormous limitation of current technology. Emerging and engineered threats could potentially be detected, but identification technologies would not be able to recognize an unknown threat agent. Consequently, release of an engineered or emerging threat that current sensor technology cannot sufficiently detect and identify could denote an unknown release. Even if a release is detected and identified, planning and treatment options might be very limited. In general, many identification technologies require prior knowledge of the specific agent and will not identify agents that are not on the list targeted for identification. Therefore, there is a need for new approaches that can identify agents based upon virulence or characteristics that do not rely on a priori knowledge of specific agents. Detection technologies might detect an engineered or emerging threat because they are less agent-specific than identification technologies, but responsive actions would be severely limited without identification.
Triggers
As a verb, “trigger” means to initiate action. In the context of building protection, a trigger is a measured event that initiates another action. The trigger of a threat agent is generally more rapid, of lower cost, and less specific than the identification technology. The trigger generally has a higher probability of false alarm and does not provide the resolution of the identification system. In this context, the trigger generally does not sound an alarm but initiates a more sensitive, and usually more costly, identification system to confirm the absence or presence of a harmful compound. A trigger can also be used to initiate a “low-regret response” within a building, such as adjusting the building ventilation to minimize the spread of potential contamination throughout the building. Triggered responses are often used in tiered detection and identification systems that progress from fast, low-regret responses based on low-specificity detection to
higher-regret responses based on accurate, but generally slower, identification. A tiered approach to detection and identification systems has lower risks of false alarms than the use of low-cost, less specific identification technology. The approach also minimizes the use of costly confirmatory tests.
Video Monitoring
Video surveillance is a powerful and effective method for recognizing suspicious activities. Image processing methods are being improved to the point where they can automatically identify out-of-the-ordinary behaviors from many cameras and alert appropriate personnel so that response efforts can be focused. Video surveillance also provides a strong psychological deterrent to an attack.
Another use of video monitoring is to identify when and where a release has occurred. Release of noxious incapacitating vapors can be observed as groups of people cough or pass out. In such cases, video monitoring can act as a primary detector for the presence of an attack. Video systems also have dual uses to providing feedback on the effectiveness of response options, such as evacuations, and for remote situational awareness.
Remote Sensing or Standoff Detection
Remote sensing is the ability to have a sensor at one location that can detect and identify the presence of a particular object at another. The distance between the two locations can vary widely from a few micrometers to many kilometers. However, remote sensing typically refers to separation distances on the order of meters or farther. The key aspect is that the two elements—the sensor and the element being sensed—do not come into physical contact. Operationally, remote sensing in a protected building could be used for both biological and chemical threat agents indoors and outdoors. Remote sensing includes active methods, where a remote stimulus is introduced and the response is recorded by the sensor, and passive methods that use only an ambient stimulus.
Biological Sensing. For distances on the order of a kilometer, the ability to detect biological aerosols has limited use because current methods provide only general information about the aerosol particles. These tools are used primarily to raise some awareness of a potential hazard in the area. In general, such systems utilize light absorption, polarization, or scatter to measure cloud size, shape, particle size, and fluorescence. This information can be important on a battlefield. In some building protection operations, this type of information can be used to adjust building ventilation and controls to minimize the exposure of occupants to a large external release. In general, more specific information about the nature of the aerosols is needed for building applications. Some research programs hold promise for finer degrees of fidelity in remote biological sensing, but these developing systems are years away from being operational. UV-LIF is technically
a remote system because the particles and the sensing elements do not come into physical contact. Such systems require concentration of particles and are generally employed as a triggering system for further identification.
Chemical Sensing. Remote chemical sensing requires a target chemical to have absorptive energy orbitals at wavelengths that are not impacted by naturally occurring molecules in the environment. Compounds in the air, such as water, nitrogen, and oxygen, have regions of absorption that make the atmosphere functionally opaque at specific wavelengths of energy. The most common wavelengths used for either active or passive interrogation are between 3 and 12 µm. Most chemical agents have optical spectra with absorptive regions that fall outside the opaque regions of the atmosphere and, therefore, are good candidates for identification by remote optical methodologies.
Light detection and ranging (LIDAR) is a common method for remote chemical sensing. The laser can function at multiple wavelengths in a scanning mode to determine differential absorption patterns that indicate the presence of one or more chemicals in a defined optical path. The system uses the differential absorption between closely adjacent regions to identify and map the chemical cloud. Differential absorption lasers generally use a precisely defined pair of wavelengths to perform a similar function. Chemical agents and many TICs are excellent candidates for this type of sensing.
Because biological agent types express different absorption properties, LIDAR is also a candidate for remote biological sensing. However, specificity is difficult to achieve because of the complexity of the absorption spectrum and because the important differences in biological threat agents are contained in the nucleus and are not responsive to absorption. Furthermore, the wavelengths required for identification of particular agents are in the ultraviolet region of the spectrum and pose a safety hazard. Nonetheless, LIDAR can be used as a particle counter and sizing system to remotely identify the presence of a particulate (non-chemical signature-containing) cloud. Systems that exploit cloud size, shape, and particle size distribution characteristics to indicate the potential presence of a biological element exist. LIDAR systems for biological and chemical agents are sophisticated systems operating with equally sophisticated algorithms. They need frequent maintenance and have substantial power requirements. In urban areas and some other locations, aerosol background or “air pollution” is high so that the signal-to-noise ratio can be problematic. A method related to LIDAR is open-path or closed-path Fourier transform infrared (FTIR) absorption, which could potentially be used as a remote sensing method. Infrared absorption can be used for chemical sensing even though data analysis and interpretation is challenging as summarized in Vogt (2006). The maintenance, power, and algorithm development issues for FTIR are similar to those for LIDAR.
Remote chemical sensing could be used on the exterior of a building to determine the presence or absence of a chemical cloud within kilometers of the
building. This capability could allow changes in the operational parameters of the building to minimize the impact of the chemical agent on the building inhabitants, particularly such low-regret options as preventing intake of outside air or overpressurizing the building with filtered air. The warning time provided would depend on the distance from target and the wind speed. Remote sensing could also be used inside a building; however, point sensors are generally more sensitive and specific. In addition, the delay between detection and contact is greatly minimized indoors because of the limited line-of-sight distances, which makes it difficult to employ active building response measures in a timely manner.
Remote chemical sensing has some limitations. Chemicals that are heavier than air might be difficult to see remotely because of building obscuration. Identification is also difficult because of possible overlap between the spectral signatures of toxic agents and those of benign compounds.
Detection and Identification of Biological Threat Agents
Biological identification systems frequently include a triggering mechanism prior to initiation of the identification system, because the identification system is expensive and it takes time to collect enough material (toxin or organism) for the system to generate a reliable and accurate identification. The most common triggers for a biological identification system are particle counters and UV-LIF triggers. Particle counters are less expensive, but they determine only the amount and relative distribution of particle size. The UV-LIF system also identifies the presence of fluorescent material (most common is tryptophan in proteins because it has a significantly higher fluorescent signature than other biological compounds). UV-LIF systems situated in facilities that also have large quantities of paper will experience inherent interference because paper particles have fluorescent whiteners within them. Other UV-LIF systems also make measurements that determine particle size or shape to reduce false positive readings. A large portion of the biological load of building air is dead human skin, which, being biological, has a fluorescent signature. The size and shape of flakes of skin are significantly different from spores or vegetative biological organisms.
Molecular methods of analysis, such as binding assays, involve identification of nucleic acids (DNA or RNA) or proteins that are characteristic of the organism. For DNA and RNA, amplification is generally required to provide an adequate amount of material for identification. Identification can be accomplished for single analyses or for small levels of multiplexing using tube-based methods such as reverse transcription polymerase chain reaction (PCR) and TaqMan PCR. For higher levels of multiplexing, DNA microarray methods are employed so that thousands of different organisms can be tested at once. For more rapid and routine analysis, immunoassays are employed for identification.
All of the molecular methods used to detect biological agents require sample collection (see earlier section “Aerosol Size Selection, Concentration, and Collection”) in order to procure a sufficient amount of sample for analysis. In most
cases, biological threat agents must be lysed and their proteins or nucleic acids extracted before analysis. One exception is identification that is based on the molecular recognition of proteins or other molecules on the bioagent surface using antibodies or other molecular recognition elements. For sensitive identification, the analysis of nucleic acids requires additional time for their amplification. Molecular methods for biodetection require multiple reagents, some of which must be stored at cold temperatures to prevent degradation. Consequently, molecular methods require time and laboratory-based instrumentation. Progress is being made to miniaturize and automate most of these processes using “lab-on-a-chip” methods involving integrated microfluidic systems. Even when the systems become available, they will require a collector, will not provide continuous detection, and will take time to carry out the analysis. Consequently, they cannot be considered monitors but offer near-real-time identification.
Function-based sensing is a detection scheme using materials that exhibit a response to the agent type based on some biological function in contrast to a typical binding or physical-based method. For example, living cells or tissues can be engineered to express a fluorescent protein or exhibit bioluminescence when exposed to an agent. This response is often based on an intrinsic biological function, such as apoptosis or a signal cascade. Unlike simple binding assays, function-based assays show biological relevance because they provide information about bioavailability, binding, and effect of the agent. Function-based sensing approaches can be designed to detect either biological or chemical threat agents.
The gold standard for detecting and identifying biological agents is to use culture-based assays. In this approach, a sample is used to inoculate a culture medium enabling any living organisms to multiply and grow. Culture techniques typically require 24 to 48 hours and can take up to weeks for some viruses and bacteria, such as Mycobacterium tuberculosis, or if the strain is unknown (which might occur for engineered or emerging organisms). In addition, culture techniques have to be conducted in a laboratory environment, so they can be used only for post-event identification (LP-3) rather than for warning or treatment modalities that require immediate action (LP-4). Culture techniques cannot be used for all biological threat agents because of the inability to culture some agents.
Detection and Identification of Chemical Threat Agents
Each chemical agent possesses a unique chemical structure with unique chemical and physical properties that enables it to be detected and identified by different detection methods. The traditional way to detect chemical agents in a vapor state is to first pre-concentrate on an adsorbent by passing several liters of air through an adsorbent column. Thermal desorption causes all of the vapors to be released from the column. A variety of methods exist for detecting these vapors. The most common commercial off-the-shelf and government off-the-shelf systems use ion mobility spectrometry (IMS). In IMS, molecules are first ionized. The gas-phase ions then migrate through a drift tube exposed to an
electric field at different rates depending on their size, shape, and mass. Another detection method is gas chromatography (GC), in which the vapors are separated on a chromatography column and identified by their retention times. A thorough discussion of the characteristics of IMS, GC-flame photometric detectors, and GC-mass selective detectors as utilized in the Army’s chemical weapons storage and disposal programs can be found in the National Research Council (NRC) report titled Monitoring at Chemical Agent Disposal Facilities (NRC,2005c).
If more definitive speciation is required, the separated vapors are introduced into a mass spectrometry system for molecular identification. These systems all take air samples at discrete intervals so that sampling is not continuous. They also are power intensive and relatively large, so they are consequently relegated to a remote laboratory or central analysis center. Such systems can be used in an autonomous fashion but can require frequent technical intervention. In addition, because of their size and maintenance requirements, they cannot be deployed in a distributed fashion throughout a building. For new construction, however, sample ports could be introduced throughout a building in which air could be pumped continuously through inert tubing to a central laboratory, where a suite of gas chromatographs would be located.
If continuous monitoring is required, vapor sensors can be used. The most common type of vapor sensor is the metal oxide sensor (MOS). In general, a MOS responds to virtually all organic vapors and provides information that a vapor release has occurred with little or no identification capability. These types of sensors have the requisite sensitivity to detect vapors at parts per million to parts per billion levels and do not require pre-concentration. Some chemical warfare agents are resistant to oxidation so they are undetectable at low concentrations by metal oxide sensors, unless the sensors are operated at elevated temperatures.
A newer technology involves sensor arrays. For vapor identification, these types of arrays are sometimes referred to as “electronic” or “artificial” noses. Sensor arrays operate on principles loosely based on the mammalian olfactory system. Multiple different sensors in the array provide differential responses to a particular vapor, and a pattern recognition algorithm can identify the agent on the basis of the collective responses. The approach relies on the use of sensor array materials with different abilities to partition vapors of interest and a transduction mechanism to measure the amount of vapor partitioned into the sensor array material. The most common array-based sensing system is the surface acoustic wave device, which uses different sensor coatings on an array of piezoelectric crystals. When the array encounters a chemical vapor, the vapor adsorbs to the sensing layers differentially and produces a characteristic pattern that is used to identify the compound. Such sensors have limited specificity. Array-based sensor systems exist in a number of research and industrial laboratories, and systems with limited functionality have been used in an operational environment. Future improvements in array-based sensors are expected to improve their sensitivity and specificity (NRC, 2005c). Chemical identification systems could, but usually
do not, rely on a triggering mechanism. Systems either operate in a continuous mode or they have a pre-concentration step followed by analysis.
Deployment Considerations
In deploying detection and identification systems for building protection applications, it is important to consider the performance and life-cycle costs of the complete system rather than individual detectors or identifiers. Performance of a complete system needs to be evaluated on the basis of sampling, processing (if needed), detection, analysis, and response. The first step in designing an effective detection and identification system is determining the types of situations and scenarios for which the system will provide protection. (See Chapter 6 for a detailed discussion.) The analysis will provide response time, detection limit, and selectivity requirements for biological and chemical agent detectors as a function of placement of the detectors. The type of detectors needed will be influenced by the backgrounds within the building, so it is also necessary to understand facility backgrounds as measured by the biological and chemical agent detectors being considered for deployment. For example, particle counters could be very effective triggers for biological agents within facilities with relatively stable, low backgrounds but would not be effective triggers in facilities with high background particle counts.
Ideally, detectors and identification systems will be placed close enough to one another to be able to detect an agent with spatial and temporal resolution high enough to prevent its dissemination over a large area or redistribution throughout the facility. For example, release of a nerve agent would provide a locally high concentration that would not require the most sensitive chemical agent detector as long as the detector was in reasonable proximity to the point of release. Deployment and distribution strategies can therefore be used for effective containment of a release. Distributed sensors also provide the ability to pinpoint the release location with higher precision and might enable dispersion modeling throughout the facility to optimize response options. However, the deployment of distributed biological or chemical agent detectors and sensors is limited by currently available technologies and their cost.
Because of the limited availability and high cost of biological and most chemical agent detectors, a tiered approach could be useful in some facilities. In this case, lower-cost triggers are used to initiate low-regret responses to contain the potential release and trigger confirmation using more expensive but typically slower detectors. Clearly, the concept of operations of the system needs to be considered when designing the detection system architecture. What action will be taken when a detector (or set of detectors) gives a warning? If a detector alarm results in no action (either automated or manual), then the detector provides no benefit and funds should not be spent for its deployment.
Relative Risk of Degradation and Activities
Just as is true with the relationship between the LP-1 options and general building maintenance, the performance of all sensing and monitoring systems depends on maintenance and adherence to operational protocols. Degradation of sensor performance often occurs as the active sensing components lose sensitivity and calibration over time. Loss either of sensitivity or calibration can result in missed detection (false negative) of an agent release. Understanding and specifying the degradation characteristics of a system prior to installation are important so that replacement of components and maintenance can be performed and built into the concept of operations (CONOPS). Replaceable components need to be accessible for easy maintenance.
The context in which detection systems will operate is as important as proper maintenance. Activities that generate high concentrations of dust or high levels of vapors can compromise sensor performance. For example, particle counters used as triggers can be activated because of construction dust. The use of high concentrations of some chemicals in buildings could cause chemical sensors to give false alarms or to become saturated and lead to a false negative if simultaneous release of an agent occurs. Chemicals that have molecular structures similar to nerve agents, such as pesticides, could lead to false positives. Such agents should not be used in the proximity of detector systems. Operations such as construction, pesticide application, and cleaning activities involving solvents must be cleared beforehand to allow adequate preparations to be made to avoid false alarms or compromised sensor performance. Physical operations also can affect sensor performance. For example, if doors are left ajar, they create unpredictable airflows or cause dilution of air that could prevent material from reaching the sensor properly.
Lack of funding to support the maintenance and proper operation of detection and identification systems would rapidly lead to a loss of performance. Assuming ongoing and reliable funding is essential when contemplating system installation because the initial capital costs have to be supported by ongoing operating cost commitments. In summary, proper resources and procedures are critical to ensure that the performance of detection and identification systems remains within the necessary range to detect agents at the requisite levels.
Technological Readiness
The NRC published a report titled Sensor Systems for Biological Agent Attacks: Protecting Buildings and Military Bases (NRC, 2005b). That report concluded that detection and identification technologies available at that time were insufficient for providing real-time “detect-to-warn” notification of building occupants (LP-4 option). Notional detection and identification systems were postulated that provided notification of biological organisms within a few minutes (NRC, 2005b, Box 6-1). The committee is unaware of recent technological ad-
vances that provide significant improvements to technologies since the release of that report. The committee agrees with the findings and recommendations of the earlier report, which includes a detailed analysis of specific sensor technologies (NRC, 2005b).
Risk of Obsolescence of Technologies
Technologies are changing fast. A tremendous amount of research and development is taking place, and the sensor area receives particular attention. Smaller, more sensitive, and more functional detection systems are being developed in research laboratories and commercially. It is essential that installed systems have the flexibility to incorporate innovations in detection and identification without requiring massive building renovations and changes in procedures. For sensor systems to remain flexible, standardization of their implementation is necessary so that when new technologies become available, they can readily be incorporated into a building to replace obsolete systems. For example, sensors and triggers are modular. By designing a building so that sensors can readily be replaced with improved and validated sensors as they become available—without major building disruption—the protection level can be improved periodically as technology advances. In the most optimistic scenario, highly functional miniature sensing systems with onboard processors and wireless communication capabilities will become available. Because such systems require power, access to power for sensors should be built into the building design. Even with the most advanced sensors, planning for future technology changes is required in the building design phase to anticipate such developments.
In addition to new identification technology, capabilities exist to synthesize new chemical agents and to engineer new organisms. Consequently, identification systems have to be adaptable to anticipate new agents rather than limited to detecting existing threats only. In this regard, sensor arrays that enable multiple, user-defined agents to be identified are superior to single-agent identification platforms. Multiplexed arrays that have the capacity to detect additional analytes as they are identified are particularly attractive. Having sensors or arrays that detect specific classes of chemical agents is likely to be the most practical solution. For example, knowledge of the exact identity of a chemical warfare agent is not necessary for a trigger event. However, given that all G-agents effectively have similar reactivity, a functional sensor for all of those agents would be sufficient to trigger countermeasures and a confirmatory sensing (by a mass spectrometer, for example).
OPERATIONAL PROCEDURES FOR PROTECTING BUILDINGS
The protection of existing buildings and their occupants from a biological or chemical threat requires the integration of operational procedures with specific building and detection or identification system attributes and response options.
Operational protective measures span actions prior to the event (for example, maintenance of the building; security procedures that reduce the likelihood of an event; and the vulnerability of the facility) to operational procedures in response to an event that mitigate the hazard to the building’s occupants or contents (for example, changing the operation of the HVAC system; evacuation of occupants). A facility manager can prepare a CONOPS for a given threat scenario from a set of specific operational response options. The operational responses should be reviewed and practiced periodically. However, uncertainties in an actual event make the operational response a complex balance of developing situational awareness and responses to protect the building and occupants. Furthermore, each of the response options affects the operation of a facility or its occupants to some extent. Some options could lead to secondary consequences, such as the possibility of deaths. The threshold below which these undesirable consequences are acceptable often determines when “low-regret” response options (for example, shelter in place in the event of an external release) are used before “high-regret” response options (for example, donning personal protection). The CONOPS needs to balance the effectiveness and potential regrets of the options and to address the uncertainties in the threat situation (type and extent of the threat). Because the development of protective action plans is presented in detail elsewhere (DOD, 2005, Appendix E), this section focuses on CONOPS when active protection (LP-3 or LP-4) is in use. An update of detailed planning guidelines for operational responses is beyond the scope of this report.
Development of an Operational Response Plan
The development of an operational response is essential because each building has its own protection system designed on the basis of its mission, location, type, protection options, and so on. Therefore, instead of developing a general plan for all buildings, an operational response plan that incorporates risk assessment and risk management approaches needs to be developed for each building to be protected (see Chapter 6). Following are the steps of a general guideline to use in developing a building-specific operational response plan in the absence of detectors (DOD, 2005, Appendix E).
-
Conduct a building survey.
-
Write specific procedures for
-
Hazard determination (threat-vulnerability analysis),
-
Decision-making process based on conditions and events,
-
Communication of emergency instructions to building occupants,
-
Evacuation, sheltering in place, ventilation and purging, and use of protective masks, and
-
Special situations.
-
-
Designate and train protective action coordinators.
-
Train building occupants on response procedures.
Once a building survey is completed, the process generally requires prioritization of a list of hazards—threats and their signatures (the ability to observe a threat)—usually presented in the form of credible scenarios. The signature of a threat can be the observation of the agent itself (such as a visible chemical agent or munitions) or the clinical signs caused by the agent. A signature, or its absence, largely determines the timing and ability to respond to an event. A major response bifurcation is the determination of whether the hazard is external or internal because of the different operational response options. Response to external hazards typically involves stopping the entry of outside air into the building and shelter in place, whereas response to internal hazards usually involves purging the air within the building and ultimately evacuating. Operational response plans can be constructed and executed on the basis of likelihood of threats, their entry into the facilities, response options, and their cost and benefits including possible regrets of actions. A detailed summary of the above process is found in the report Security Engineering: Procedures for Designing Airborne Chemical, Biological, and Radiological Protection for Buildings (DOD, 2005).
In this study, two levels of response options are added to traditional building protection plans: detect to treat after an event (LP-3) and detect to protect during an event (LP-4). It is beyond the scope of this report to develop guidelines for the implementation of response plans for new protection technologies, but some observations can be made. For LP-3 (detect to treat), because of the inherent delays in obtaining actionable information, the immediate response plans do not change; any responsive actions will be based on the previously defined signatures above. The fundamental change is the moderate- to long-term response that determines therapeutic care for occupants, situation stabilization once the threat is known, and decontamination. The addition of LP-3 to building protection is similar to what has been developed for the BioWatch program within the Department of Homeland Security (DHS), a detect-to-treat program for cities with a 12- to 36-hour response time for a specific set of biological agents (DHS, 2006). Detailed planning and response documents were developed by the cities that are using the BioWatch technologies based on the guidance provided by DHS. Similar guidance documents likely have been developed for equivalent detect-to-treat implementations in DOD (for example, the Guardian Program of the Joint Program Executive Office for the Chemical and Biological Defense).
Because of the many possible response options for LP-4 (detect to protect), the operational plan can be complex, and the plan usually involves low-regret options initiated by higher-uncertainty detection and higher-regret actions initiated based on confirmatory detection. This type of tiered response requires commensurate operational plans, which can include triggering the capture of additional information (for example, visual confirmation of symptoms or triggering of detectors with higher operating expense) and assessment of the evolving situation. Examination of multiple scenarios is critical to ensure that the operational plan is complete for the hazard assessment. Consideration of different scenarios is likely to lead to more complex response plans. Although automation of response
options, such as detection triggers shutting down HVAC systems, can reduce the complexity of human response activities and provide rapid and effective response, automated components or systems cannot be realized in most facilities in the near future. Consequently, response plans with humans in the loop are still required, and continuous updating of plans and training of personnel are necessary.
Because inappropriate response actions (for example, evacuation through a contaminated part of a building or into contaminated air outside) can increase the hazard to occupants or compromise the mission of the building, resources and occupant protection require appropriate operational procedures to be developed and practiced. Even passive protection systems (LP-1 and LP-2) are more effective with some degree of operational procedures. Furthermore, developing operational plans for LP-3 or LP-4 technologies is critical to the overall performance of the system, and guidelines for developing such plans would be useful.
Personal Protective Equipment
Personal protective equipment (PPE) includes clothing and equipment used to protect individuals in their working environment from contact with infectious or toxic chemicals or physical hazards. A basic tenet of health and safety management is that collective options such as the passive and active building design elements described above are preferred to reliance on protective equipment. This concept applies also to the protection of building occupants from a biological or chemical weapons attack. Nevertheless, where collective options are themselves inadequate to protect building occupants for all scenarios of interest, protective equipment can play an important role. This section focuses on respiratory protection only because that is the primary focus of most PPE programs for building occupants.
The appropriate PPE for occupants of a facility depends on the operations conducted in the facility and the potential hazards associated with the activity. In a laboratory, factory, or research environment where hazardous materials are routinely used, PPE typically serves only as a secondary barrier for protection. In a typically nonhazardous setting, respiratory protection may be required to provide additional protection for unforeseen events, such as a toxic industrial agent spill or a terrorist attack.
Proper PPE must be carefully chosen to mitigate the hazards presented by the risk of attack and the class of threat agent of concern. In a biocontainment laboratory setting, workers would consult agent summary statements on biosafety and worker protection (Richmond and McKinney, 1999; DHHS, 2007), agent manuals (Heyman, 2005), material safety data sheets (for hazardous or potentially hazardous chemicals), facility standard operating procedures, and people (such as facility safety personnel) knowledgeable about the associated hazards to assist in the selection of appropriate PPE. In a typically nonhazardous setting, the nature of the threat agents of concern, the potential concentrations of the agents, the level of training of PPE users, and the purchase and maintenance costs of PPE are
factors to be considered when selecting the appropriate PPE. Resources are available to guide the selection of appropriate respiratory protection devices (OSHA, 1999; DHHS, 2000; NFPA, 2001; NIOSH, 2004). Irrespective of the specific devices that are selected, the implementation of an active program is essential to ensure that PPE is properly selected, inspected, and maintained periodically and that users of the devices are trained.
The most likely personal emergency equipment to be used in conjunction with other modes of building protection is “escape hoods” and other respirators. Escape hoods are typically single-use transparent “bags” that fit over the entire head and contain HEPA and activated charcoal filters. Although HEPA filters used in respirators are not certified by the National Institute of Occupational Safety and Health (NIOSH) for use in a biological environment (IOM, 1999), they have been used successfully to protect personnel for many years. However, implementing a program for use of disposable airways protection equipment in a building protection system is difficult—especially in the case of a biological attack—for the following four reasons: (1) occupants have to be warned in a timely manner to don the equipment; (2) the equipment has to be tested periodically for performance; (3) there is a small chance of injury and death from use of the equipment; and (4) the equipment cost per device could be $100 or more.
SYSTEMS INTEGRATION TO ACHIEVE PROTECTION
As Figure 3-1 illustrates, the effectiveness of building protection depends on the complex interaction of multiple factors. Selection of strategies and tools for protection requires careful consideration of the threats and vulnerabilities against which to protect, the goals and objectives of protection, the procurement and type of the building to be protected, and the desired level of protection. Although technology-based sensors and detection and identification systems define active protection, their presence does not infer that LP-3 or LP-4 is achieved. Active detection systems do not enhance protection unless they are complemented by an operational response plan and operate in an environment with high air quality to maximize performance of the sensors. LP-4 protection from some biological and chemical threats, particularly the category of “cannot-detect, cannot-treat” (Chapter 2 and Figure 5-2), is not possible at this time because of the fast-acting nature of the threat agents or the technological limitations of identification technologies. Given the complexity of building protection, a tool that assists in the selection of protection options for building specifications under different scenarios would be helpful (see Chapter 6).
LIMITATIONS AND RISKS OF EACH LEVEL OF PROTECTION
Different levels of protection can be achieved using a combination of building design, detection and identification technologies, and operational responses.
However, retrofitting LP-1 and LP-2 systems into existing buildings that are poorly constructed or have marginal HVAC systems might not be possible. For example, the extent to which filtration systems can be upgraded is limited by the characteristics of such air distribution components as fans and space constraints in mechanical equipment rooms. Buildings served by a small number of large-volume recirculating systems could be difficult to compartmentalize effectively. To implement protection in buildings, an LP-3 or LP-4 system might be considered, but as noted earlier, these options work optimally in clean (LP-1) facilities and might perform poorly in other circumstances.
LP-1, a low-level passive protection option, relies on site selection, access control, construction of the building to reduce exposure, and selection of systems to minimize normal exposure. Site selection and construction are practical when the planning and construction of a new building is considered, but they are not an option for existing building stock unless surrounding areas can be altered and construction materials can be retrofitted. Access control can be retrofitted in most buildings, with a range of options from gating and guards to sophisticated screening procedures. Routine building systems provide for dilution of indoor air and reduce recirculation of building indoor air. There are minimal external (from outdoors to indoors) and internal (between compartments within the building) leakages in the HVAC system and in the building envelope. However, as stated earlier, the envelope becomes more susceptible to leakage as buildings age, and this parameter is rarely assessed in routine maintenance practices. LP-1 also incorporates particle filtering as needed for a healthy workplace, but filtration systems require maintenance and changing of filters by qualified individuals. LP-1 does not include a monitoring option and, as such, cannot provide information to document that airborne contaminants are present for possible public health response or for forensics.
LP-2, a high-level passive protection option, builds on the features of LP-1 and provides an upgraded protection from biological and chemical attacks. Upgrading of filters (particulate and adsorption) can be efficacious, but it requires monetary resources and technical personnel to routinely change the filter matrix and ensure that there is no filter bypass following filter change-out. The use of current sorption-based chemical filters often requires significant upgrades to the HVAC system because of the large pressure drop across the filter bed. The size and weight of these systems is also an important consideration. In addition, the methods to ensure adequate filter bed capacity (lifetime) are difficult, especially when chemical agents are considered. Zoning with graded pressurization, local air-washing vestibules, and protected air intakes are necessary retrofits for existing buildings and important considerations in the design of new buildings. None of the features of LP-2 buildings provides a monitoring capability.
LP-3 is a low-level active protection option that ensures that a hidden threat agent is detected and identified. LP-3 is a detect-to-treat option. Although LP-3 provides protection for latent-acting threat agents with possible treatment, it
might not capture information quickly enough for fast-acting threat agents. LP-3 can be a fully automated detect-to-treat system and can also include human-in-the-loop decisions and actions to activate systems—that is, the sensor system notifies a person of a potential biological or chemical attack and the person takes action to minimize impact of the release. Thus, LP-3 might require training and sophisticated operational procedures to minimize human error. Another limitation of LP-3 and LP-4 is that active detection has the potential of falsely indicating the presence or absence of a threat.
LP-4 is a high-level active protection that can “detect to treat,” “detect to mitigate,” or “detect to warn and protect.” LP-4 includes rapid, automated systems. LP-4 eliminates the human decision factor, but the complex and sophisticated automated systems require routine maintenance to ensure their proper operation.
The relative risks of different levels of protection in the event of a biological or chemical attack depend on multiple factors. The fundamental risk underlying all levels of protection is the risk of exposing occupants to harm and disrupting building operations. One factor that influences this fundamental risk is the environment in which the protection system operates. If an active detection system (LP-3 or LP-4) operates in an environment with high background that causes either high false positives or negatives, an LP-3 or LP-4 system might not offer additional protection compared to an LP-2 system. The relative risks of different levels of protection can be assessed only in the context of the building in which the protection system operates.











































