
Engineering Tools for Studying Marine Mammals
SEAN M. WIGGINS
Scripps Institution of Oceanography
University of California, San Diego
Studying whales and dolphins (cetaceans) can be challenging because they often occupy remote, inhospitable areas, spend much of their lives underwater, and have diverse behaviors and habitats. With ship-based visual observations, the traditional method of studying marine mammals in the ocean, animals can be counted and their behaviors noted. However, because whales and dolphins spend as much as 95 percent of their time below the sea surface and beyond visual range, traditional methods require years to decades of effort to provide enough data for the development of ecological and behavioral models. Fortunately, because these animals often use sound while submerged to sense their environment, communicate with each other, and find food by echolocation, acoustic monitoring methods can provide rich data sets for studying them.
The reliance on sound for their life functions potentially makes marine mammals highly susceptible to acoustic disturbances. For example, the use of sonar by the U.S. Navy has been linked to mass strandings (Cox et al., 2006; Frantzis, 1996), and increased ambient noise levels from large-scale commercial shipping (McDonald et al., 2006) might interfere with their ability to locate food and mates. Adverse effects from these and other anthropogenic activities, especially the use of sonar, have accelerated the development of technologically advanced tools for studying marine mammals.
Two main types of tools—tags and passive acoustic monitors—are used to study the natural behavior of whales and dolphins and their responses to sound
beneath the sea surface. Tags are small instrumented devices that are attached to individual animals; they provide detailed behavioral information of the tagged animal. However, because of the difficulty of finding animals in the ocean and of attaching the tags, not all species of marine mammals have been tagged, and the number of tagged animals is relatively small. Despite these limitations, detailed information provided by tags has greatly advanced our understanding of many species.
Acoustic monitoring (which has also been incorporated into some tag devices) is typically used over much longer periods of time and larger distances to provide temporal and spatial patterns of animal and anthropogenic sounds, providing a basis for the development of ecological and behavioral response models. This paper describes technologically advanced devices used for tagging and acoustic monitoring and some of the challenges of making measurements with these tools in the ocean environment.
TAGS
Tags for studying whales and dolphins have various capabilities: pressure sensors for measuring depth; global positioning system (GPS) and Argos satellite receivers for tracking movement on a large scale; compass sensors for identifying headings; multi-axis accelerometers for describing swimming dynamics; acoustic sensors for recording sound; and video cameras for capturing images (e.g., Andrews et al., 2005; Burgess et al., 1998; Goldbogen et al., 2006; Hooker and Baird, 1999; Johnson and Tyack, 2003; Marshall, 1998). Two techniques are used to attach tags. Long-duration (weeks to months) tags use barbed darts that pierce the animal’s skin and are delivered by crossbow or air-gun (Figure 1A). Short-duration (hours to days) tags use non-invasive suction cups and are typically placed on the animal using long poles (Figure 1B).
Long-deployment tracking tags, which send data (locations) to scientists through satellite communications and are not recovered, can be packaged in a small form factor because battery requirements are small and data are not stored. Recoverable short-duration suction-cup tags require larger packaging for data storage, additional sensors and batteries, a radio transmitter, and a flotation device. Acoustic recorders incorporated into some short-duration, multi-sensor tags have provided valuable information on the acoustic behavior of large cetaceans (whales). Thus far, however, they have not been used on smaller cetaceans (dolphins), because their large size would create noticeable hydrodynamic drag that would interfere with the animal’s movements. Another drawback of using suction-cup tags for small cetaceans is that these animals produce higher frequency (10s–100s kHz) sounds than larger animals, such as baleen whales (10 Hz–1000s Hz). Thus smaller animals require faster sample rates, which in turn require larger storage capacity and additional batteries.
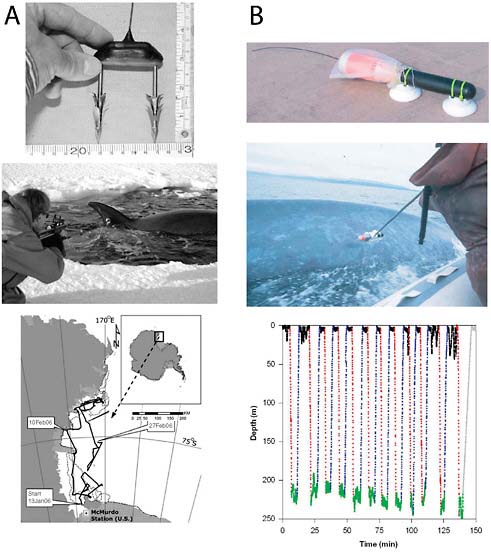
FIGURE 1 Two types of tags, their attachment methods, and results. (A) Long-duration (days to months) barbed darts on satellite tracking tag, air-gun deployment of tag on killer whale, and one month of killer whale tracks. Source: Reprinted with permission from Springer Science+Business Media: Andrews et al., 2008. (B) Short-duration (hours to days) suction cups on B-probe (acoustic, depth, 3-axis acceleration tag), tag attachment on blue whale using pole, and two-hour dive profiles from a tagged fin whale offshore of southern California.. Sources for photos: Erin Oleson; Burgess et al., 1998; Goldbogen et al., 2006.
Fortunately, “loss-less” data compression and small, low power, high capacity storage devices can be used with tags. Currently, the best example is a DTAG, a device based on cell phone technology that can record not only compressed loss-less audio of up to 192 kHz, but also pitch, roll, heading, and depth (Johnson and Tyack, 2003). So far, DTAGs have only been used on animals about 5 meters or longer. The current challenges are to miniaturize the packaging of these electronics further in a container that keeps seawater out at high pressures, has buoyancy and a radio transmitter for recovery, and is small enough to be attached to dolphins without affecting their swimming behavior.
PASSIVE ACOUSTIC MONITORING TOOLS
A variety of tools are used for remote monitoring of free-ranging dolphins and whales over long periods of time. Some of these passive devices provide real-time acoustics via cabled or radio-linked hydrophones (e.g., McDonald, 2004). Others are autonomous devices that record sounds internally (e.g., Clark et al., 2002; Fox et al., 2001; Lammers et al., 2008; Wiggins, 2003).
In many ways, autonomous acoustic recorders are more practical than real-time systems because they can be deployed in remote locations worldwide, have lower costs, and require no supervision for collecting data. In addition, because autonomous recorders have larger data and power storage capacities than acoustic tags, they can monitor for longer periods of time (months–a year). Autonomous acoustic recorders can also be distributed over large areas to provide temporal and spatial patterns and relative abundance estimations of calling animals (e.g., Munger et al., 2008; Oleson et al., 2007; Sirovic et al., 2004). Furthermore, they can be configured into arrays with close sensor spacing for tracking individuals or groups of animals (e.g., Frasier et al., 2009; McDonald et al., 1995; Tiemann et al., 2004).
One of the most capable autonomous systems currently available is the high-frequency acoustic recording package (HARP), which can sample up to 200 kHz and has 2 terabytes (TB) of data storage on 16 laptop-type disk drives (Wiggins and Hildebrand, 2007). I have been developing HARPs (Figure 2) since 2004 at Scripps Institution of Oceanography and deploying them worldwide in deep and shallow waters to monitor and track a variety of marine mammals, from low-frequency (10 Hz) blue whales to high-frequency (100 kHz) dolphins. Continuous sampling at 200 kHz and 16 bits per sample fills up a HARP disk space in about two months (~ 35 GB/day), at which point the instrument must be recovered and refurbished with new batteries and disks. However, servicing instruments every few months requires ship time and personnel, both of which are expensive.
One solution my group is working on is to increase data storage capacity while lowering power consumption by replacing the hard disk drives with solid-state memory (NAND flash), a type of data storage that has been shown with time to decrease in price and increase in capacity. Even as improvements are made, our
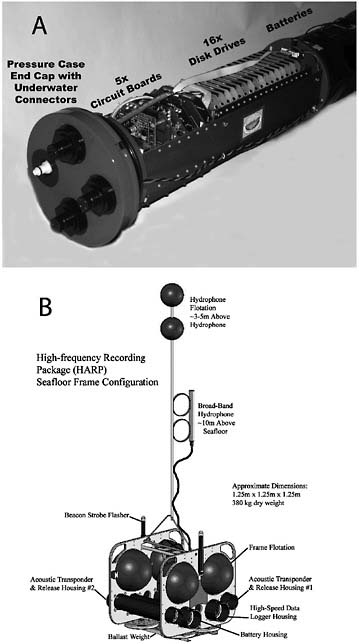
FIGURE 2 High-frequency acoustic recording package (HARP). (A) Data logger attached to end cap of pressure resistant case. The autonomous data logger consists of low-power electronics including 200 kSample/sec analog-to-digital converter, low drift (10−8) clock, and about 2 TB of data storage on 16 laptop-style hard disk drives. Source: Adapted from Wiggins and Hildebrand (2007). (B) HARP instrumentation packaging in a seafloor-mounted frame. Source: Adapted from Wiggins and Hildebrand (2007).
greatest challenge is analyzing the large amounts of acoustic data collected by these instruments. Each instrument records up to 12 TB/year, and the number of instruments is increasing from our current count of 25 (i.e., 300 TB/year).
Acoustic data are measured as time series of pressure, which can be transformed into the spectral (frequency) domain via Fourier transforms and displayed as spectrogram (time-frequency) plots. Because most species and man-made sounds are unique in spectral and temporal character and can be easily differentiated, spectrograms are often used to evaluate acoustic data for animal and anthropogenic sounds (Figure 3A). However, evaluating wide-frequency-band data, such as data collected by HARPs, can only be analyzed in near real-time because of human and computational limitations. Thus, analysis of long-term data sets directly by spectrograms cannot be done in a reasonable amount of time.
Long-term spectral averages (LTSAs, Figure 3B) can provide an efficient overall view of large data sets, as well as a means of searching for and evaluating events of interest (Wiggins and Hildebrand, 2007). LTSAs are essentially spectrograms with each time pixel representing many (1,000s) spectra (e.g., 5 seconds) averaged together rather than just one spectrum (e.g., 5 microseconds) as used in a typical spectrogram.
For more detailed, quantitative analyses, automated detectors can be used on time series, spectrograms, and LTSAs to find specific sounds with known characteristics in large data sets. The resulting detections can be organized by time and location to reveal seasonal, daily, and regional patterns related to species behavior and habitat. The performance of a detection algorithm is based on various algorithm parameters and the data set. Once parameters have been optimized through multiple training tests conducted by analysts, the algorithm can be used in an automated way on a full data set to find sounds with specific characteristics. However, because these long-term data sets have a wide range of sounds, many detection algorithms must be developed, optimized, and applied to the same data sets.
In the future, our approach to the problem of running multiple detectors on large data sets will be to use multiple processors arranged in clusters that can access the same data nearly simultaneously. We believe this will provide more efficient detections of a wide range of animal and anthropogenic sounds.
SUMMARY
Whales and dolphins use a variety of sounds underwater to sense their environment and to communicate. These sounds can be recorded over long durations using passive acoustic monitoring instrumentation and over shorter periods of time for more detailed information with devices attached directly to animals. These tools provide information on marine mammal spatial and temporal distribution and acoustic behavior. As work on these tools continues, they could also potentially provide information about animals’ responses to anthropogenic sound
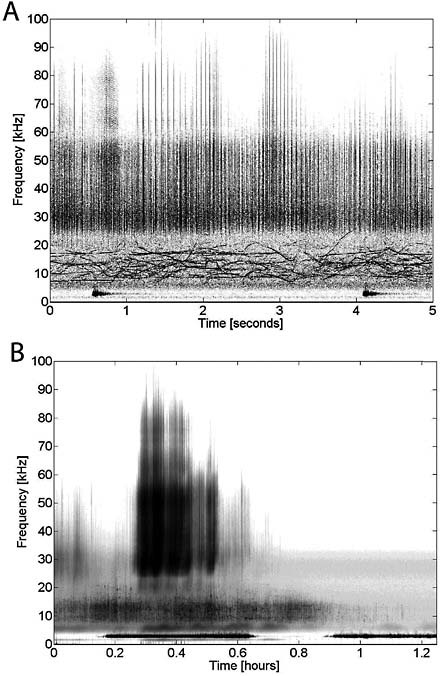
FIGURE 3 Example HARP acoustic data offshore of southern California. (A) Five-second spectrogram shows dolphin clicks from about 25 kHz up to 100 kHz, dolphin whistles from about 8 kHz to more than 20 kHz, and man-made sonar around 3 kHz. (B) Long-term spectral average (LTSA) over 75 minutes shows a bout of dolphin whistles and clicks and sonar.
sources such as sonar and explosions. At this point, these technically advanced tools have created another challenge—the need for technologies for analyzing these very large data sets.
REFERENCES
Andrews, R.D., L. Mazzuca, and C.O. Matkin. 2005. Satellite tracking of killer whales. Pp. 238–248 in Synopsis of Research on Steller Sea Lions: 2001–2005, edited by T.R. Loughlin, D.G. Calkins, and S. Atkinson. Seward, Alaska: Alaska SeaLife Center.
Andrews, R.D., R.L. Pitman, and L.T. Ballance. 2008. Satellite tracking reveals distinct movement patterns for Type B and Type C killer whales in the southern Ross Sea, Antarctica. Polar Biology 31(12): 1461–1468.
Burgess, W.C., P.L. Tyack, B.J. Le Boeuf, and D.P. Costa. 1998. A programmable acoustic recording tag and first results from free-ranging northern elephant seals. Deep-Sea Research Part II: Topical Studies in Oceanography 45(7): 1327–1351.
Clark, C.W., F. Borsani, and G. Notarbartolo-di-Sciara. 2002. Vocal activity of fin whales, Balaenoptera physalus, in the Ligurian Sea. Marine Mammal Science 18(1): 286–295.
Cox, T.M., T.J. Ragen, A.J. Read, E. Vos, R.W. Baird, K. Balcomb, J. Barlow, J. Caldwell, T. Cranford, L. Crum, A. D’Amico, G. D’Spain, A. Fernandez, J. Finneran, R. Gentry, W. Gerth, F. Gulland, J. Hildebrand, D. Houser, T. Hullar, P.D. Jepson, D. Ketten, C.D. Macleod, P. Miller, S. Moore, D.C. Moutain, D. Palka, P. Ponganis, S. Rommelo, T. Rowles, B. Taylor, P. Tyack, D. Wartzok, R. Gisiner, J. Meads, and L. Benner. 2006. Understanding the impacts of anthropogenic sound on beaked whales. Journal of Cetacean Research and Management 7(3):177–187.
Fox, C.G., H. Matsumoto, and T.A. Lau. 2001. Monitoring Pacific Ocean seismicity from an autonomous hydrophone array. Journal of Geophysical Research 106(B3): 4183–4206.
Frantzis, A. 1996. Does acoustic testing strand whales? Nature 392(6671): 29.
Frasier, K.E., S.M. Wiggins, and J.A. Hildebrand. 2009. Acoustic tracking of whistling dolphins offshore of Southern California. Journal of the Acoustical Society of America 125(4): 2548.
Goldbogen, J.A., J. Calambokidis, R.E. Shadwick, E.M. Oleson, M.A. McDonald, and J.A. Hildebrand. 2006. Kinematics of foraging dives and lunge-feeding in fin whales. Journal of Experimental Biology 209(Part 7): 1231–1244.
Hooker, S.K., and R.W. Baird. 1999. Deep-diving behaviour of the northern bottlenose whale, Hyperoodon ampullatus (Cetacea: Ziiphidae). Proceedings of the Royal Society of London B 266: 671–676.
Johnson, M.P., and P. Tyack. 2003. A digital acoustic recording tag for measuring the response of wild marine mammals to sound. IEEE Ocean Engineering 28(1): 3–12.
Lammers, M.O., R.E. Brainard, W.W.L. Au, T.A. Mooney, and K. Wong. 2008. An ecological acoustic recorder (EAR) for long-term monitoring of biological and anthropogenic sounds on coral reefs and other marine habitats. Journal of the Acoustical Society of America 123(3): 1720–1728.
Marshall, G.J. 1998. CRITTERCAM: an animal borne imaging and data logging system. Marine Technology Society Journal 32(1): 11–17.
McDonald, M.A., J.A. Hildebrand, and S.C. Webb. 1995. Blue and fin whales observed on a seafloor array in Northeast Pacific. Journal of the Acoustical Society of America 98(2): 712–721.
McDonald, M.A. 2004. DIFAR hydrophone usage in whale research. Canadian Acoustics 32(2): 155–160.
McDonald, M.A., J.A. Hildebrand, and S.M. Wiggins. 2006. Increase in deep ocean ambient noise in the Northeast Pacific west of San Nicolas Island, California. Journal of the Acoustical Society of America 120(2): 711–717.
Munger, L.M., S.M. Wiggins, S.E. Moore, and J.A. Hildebrand. 2008. North Pacific right whale (Eubalaena japonica) seasonal and diel calling patterns from long-term acoustic recordings in the southeastern Bering Sea. Marine Mammal Science 24(4): 795–814.
Oleson, E.M., S.M. Wiggins, and J.A. Hildebrand. 2007. Temporal separation of blue whale call types on a southern California feeding ground. Animal Behaviour 74(4): 881–894.
Sirovic, A., J.A. Hildebrand, S.M. Wiggins, M.A. McDonald, S.E. Moore, and D. Thiele. 2004. Seasonality of blue and fin whale calls and the influence of sea ice in the Western Antarctic Peninsula. Deep Sea Research Part II: Topical Studies in Oceanography 51(17–19): 2327–2344.
Tiemann, C.O., M.B. Porter, and L.N. Frazer. 2004. Localization of marine mammals near Hawaii using an acoustic propagation model. Journal of the Acoustical Society of America 115(6): 2834–2843.
Wiggins, S.M. 2003. Autonomous acoustic recording packages (ARPs) for long-term monitoring of whale sounds. Marine Technology Society Journal 37(2): 13–22.
Wiggins, S.M., and J.A. Hildebrand. 2007. High-frequency Acoustic Recording Package (HARP) for broad-band, long-term marine mammal monitoring. Pp. 551–557 in Proceedings of the International Symposium on Underwater Technology 2007 and International Workshop on Scientific Use of Submarine Cables & Related Technologies 2007, April 17–20, 2007, Tokyo, Japan.










