
Promising Technologies for Antarctic and Southern Ocean Science
Science has always been advanced by improvements in technology, often adapting technologies originally developed for other purposes and using them to advance research capabilities. Conducting scientific research in Antarctica and the Southern Ocean involves overcoming serious challenges from the environmental conditions and the remoteness of the continent. Scientists rely on various technologies to overcome these challenges, and, as new technologies emerge, they can unlock new opportunities for accessing new locations for research, obtaining new data, and other ways to improve scientific endeavors in this remote region. In the coming decades, new technologies will offer significant opportunities to improve, among other things, the instrumentation and infrastructure involved in scientific research in Antarctica and the Southern Ocean. Instruments that are smaller in size, including novel sensors that use less power, function during the Austral winter (the “cold and dark”), and can remotely transfer data will be needed to make observations in places and times that have been less accessible until now. An in-depth discussion of sensor development is beyond the scope of this report.
Improved instrument platforms will allow observations to be made in more places and at more times. This section, while not exhaustive, provides an exemplary list of several emerging instrument platforms that are worth examining.
FLOATS
Neutral buoyancy floats were conceived long ago (Swallow, 1955), and newer versions are now routinely used by the international oceanographic community, including RAFOS floats (SOund Fixing And Ranging, SOFAR spelled backward). Subsurface floats are now in wide use; they drift freely in ocean currents at depth and can periodically descend to 2,000 m and then ascend to the surface to report measurements of conductivity (salinity), temperature, and pressure (depth) from 2,000 m depth to the surface. Global coverage of ice-free regions has been achieved through the international
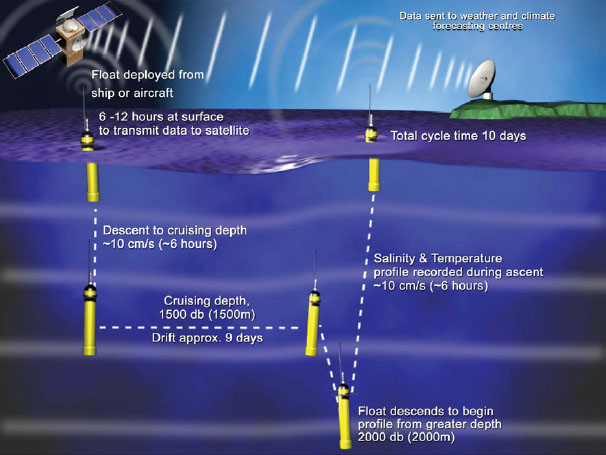
FIGURE C.1 An example of a currently existing oceanographic float that provides measurements of conductivity, pressure, and temperature from which salinity and depth are calculated. Additional sensors include oxygen, nitrate, optical properties, and soon pH. New floats designed for operation underneath ice shelves would have a protective bonnet over the antenna.
SOURCE: Southampton Oceanography Centre.
Argo program (Figure C.1).1 Additional sensors that can be incorporated, separately from the Argo program, include oxygen, nitrate, fluorescence, velocity, and soon pH; the capability to profile to a much greater depth is under development. An emerging technology of importance for the sea-ice-covered Southern Ocean is the long-duration float, which is programmed to profile repeatedly in ice-covered oceans without transmitting data on each ascent. The float uses a collision avoidance algorithm to test for ice or open water above it, and data transmission occurs only when the float can surface through open water. The precedents for this approach are two previous studies in Antarctica’s Weddell Sea where an array of moored acoustic (RAFOS) sources
________________
1See http://www.argo.ucsd.edu/index.html and http://wo.jcommops.org/cgi-bin/WebObjects/Argo.woa.
exists to track under ice floats (Klatt et al., 2007) and a recent study along the Wilkes Land coast using 19 profiling floats with an ice avoidance algorithm based on the temperature gradient during ascent rather than a collision sensor (Wong and Riser, 2011).
AUTONOMOUS UNDERWATER VEHICLES
Autonomous underwater vehicles (AUVs) enable collection of pressure, conductivity, and temperature data in underwater areas that are difficult to reach, such as underneath fully or partially ice-covered waters of the Southern Ocean and the coastal areas of Antarctica. AUV use is increasing in oceanographic research (National Research Council, 2011c). Current propeller-driven AUVs have limited ranges, on the order of hundreds of kilometers, depending on their payload and operational speeds. A new AUV design employing buoyancy-driven propulsion has a significantly expanded operational range of thousands of kilometers (Bellingham et al., 2010); see Figure C.2.
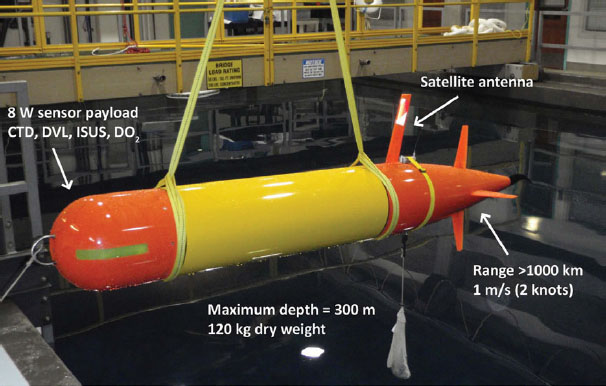
FIGURE C.2 An example of an emerging development in AUVs that has significantly longer operational range based on buoyancy-driven propulsion system.
SOURCE: Bellingham et al., 2010.
Such advances enhance the opportunities for oceanographic and biological observations and process experiments, including measurements of phytoplankton blooms over the course of several weeks, or by transiting long distances to areas of interest.
INSTRUMENTED PELAGIC ANIMALS
The revolution in miniaturization has made it possible to equip pelagic animals such as seals, walruses, whales, sharks, tuna, and others with instruments to collect and report information on conductivity, temperature, and depth (using satellite-relayed data logging, or “CTD-SRDL”), as well as position from Global Positioning System (GPS). Data recorded during a dive are transmitted to satellites when the animal comes to the surface to breathe. Ice cover in the Weddell Sea makes it difficult to obtain data on the continental shelf and slope, especially in winter. During IPY measurements were taken from acoustically tracked floats and instruments carried by various types of seals; see Figure C.3. These provided data on seal movement (Figure 4.3) as well as CTD.
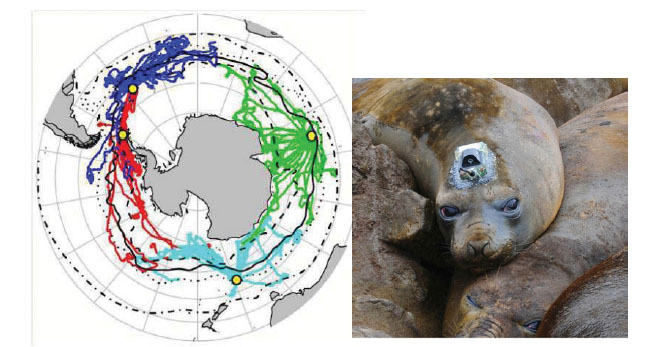
FIGURE C.3 Southern Elephant seal tracks from animal-mounted CTD-SRDL sensors (left) and an elephant seal with a transmitter (right). SOURCES: (left) Biuw et al., 2007. © 2007 National Academy of Sciences; (right) D. Costa.
The electronic tags were glued onto the fur and can stay on for several months before falling off when the animal molts. Although there is some evidence that shows the attachment of such devices can alter the water flow along a seal’s body (Hazekamp et al., 2010), there is also evidence that suggests that these devices do not significantly affect the mass gain or survival of the seals (McMahon et al., 2008). Southern Elephant seals dive so deep that they can collect data from the water column down to 1,500 m, and they cover a large geographic area. Many dives are to the sea bed, thereby providing bathymetric data. High-precision mapping of ocean topography was recently demonstrated using such instrumented seals (Padman et al., 2010).
AIRCRAFT
Aerial platforms are used to support instruments that measure in situ components of the atmosphere, or remote sensing measurements “looking down” at Earth, or “looking up” into space. These platforms provide data in a critical gap between ground observations and satellite measurements. The Hercules C-130 has been a major tool for Antarctic research, transporting personnel, equipment, and fuel. First manufactured by Lockheed in the 1950s, the C-130 was modified for ski takeoff and landing (designated the LC-130) and continues to support Antarctic science missions because of its range, payload, and versatility. The LC-130 has recently been outfitted with a new mechanical arm to allow for RADAR and LIDAR instruments that are used to map ice elevation, ice sheet thickness, and bedrock topography (see Figure C.4). This is an example of using new technology to exploit an existing platform for enhancing scientific research.

FIGURE C.4 Hercules turboprop aircraft modified for Antarctica. Current design is LC-130 with modifications that allow LIDAR and RADAR observations of continental ice characteristics and thickness.
SOURCE: E. Dunlea.

FIGURE C.5 Recent unmanned aerial vehicle designs.
SOURCE: (left) NASA/Dryden/C. Thomas; (right) NOAA/PMEL.
UNMANNED AERIAL VEHICLES, DRONES, AND AIRSHIPS
In addition to manned aircraft, unmanned aerial vehicles (UAVs), often referred to as “drones,” are beginning to be used for atmospheric measurements, remote sensing, and aerial image recording (see Figure C.5). Current UAVs have flight durations of minutes to hours, depending on size, payload, and flight altitude; they can fly patterns to sample specified areas and altitudes; and they are reusable. UAVs have already found their way into atmospheric composition sampling, measuring temperature, aerosols, and ozone (e.g., the GlobalHawk2 mission), as well as seal census projects (e.g., ScanEagle3). Future use of UAVs would allow access to more remote areas. Future development of longer duration air ships could allow atmospheric observations to be made over the course of weeks to months (see Figure C.6).
DRILLING TECHNOLOGIES
Coring and access drilling provide tools for understanding Antarctic geology and paleoclimatology. Knowledge gained from previous drilling projects (such as the Deep Sea Drilling Project, the Ocean Drilling Program, and the Integrated Ocean Drilling Program) has been extended to the ANDRILL (Antarctic Geological Drilling) Program that involves more than 200 scientists from five countries.4 Sediment coring is now done from ships in sea ice and from stationary sites on the ice shelf. Cores through more than 4 km of continental ice to bedrock have been collected, and drilling to two
________________
2See http://www.nasa.gov/centers/dryden/research/GloPac/.
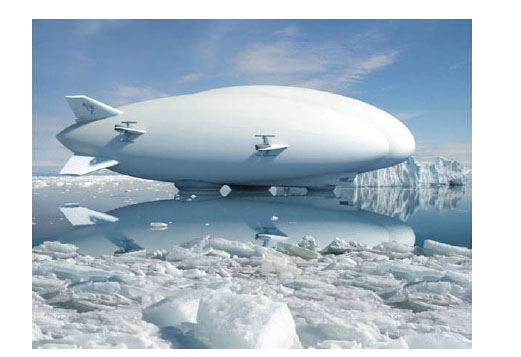
FIGURE C.6 Future vision of long-duration air ship; medium-altitude blimp system pictured.
SOURCE: © Lockheed Martin 2008. Reprinted by permission.
known subglacial lakes is under way, with penetration expected in 2011. Significant research and development are still needed, however, to study subglacial lakes such as Lake Vostok and Lake Ellsworth (Rock and Bratina, 2004). In particular, improved technologies to minimize contamination and to deploy autonomous survey instruments are needed.
New drilling technologies are currently evolving and include examples such as the SHALDRILL (Shallow Drilling) project for ship-based coring along Antarctica’s continental shelf, and the FASTDRILL project of mobile drilling capability to allow rapid drilling of arrays of deep (e.g., 4 km) holes through the continental ice sheet to bedrock at a local or continental scale (Powell et al., 2006). In fact, an NSF-supported workshop in 2002 recommended the development of advanced drilling technologies to reach bedrock beneath >2.5 km of ice. Methods such as hot-water drilling, coiled-tube drilling, and hybrid systems adapted to ice sheet drilling require additional engineering to enable multiple drill sites over the next 20 years. Improved technologies for rapid drilling will allow the production of multiple arrays of boreholes covering large areas (Tulaczyk et al., 2002).
This page intentionally left blank.








