
TA07 Human Exploration Destination Systems
INTRODUCTION
The draft roadmap for technology area (TA) 07, Human Exploration Destination Systems, addresses six level 2 technology subareas:1
• 7.1 In-Situ Resource Utilization (ISRU),
• 7.2 Sustainability and Supportability,
• 7.3 Advanced Human Mobility Systems,
• 7.4 Advanced Habitat Systems,
• 7.5 Missions Operations and Safety, and
• 7.6 Crosscutting Technologies.
The TA07 roadmap includes technologies necessary for supporting human operations and scientific research during space exploration missions, both in transit and on the destination surfaces. The missions identified in this roadmap will experience extreme environments. These environments include reduced gravity (less than 1 g); high levels of several types of radiation as well as ultraviolet light (space weather); vacuum or significantly reduced atmospheric pressures; dusty surfaces (Moon and Mars); and micrometeoroids and/or orbital debris. Many of the elements of the roadmap could have early application to the International Space Station (ISS) and commercial human spaceflight operations, and the ISS is an important test platform for some of the technologies to be deployed beyond low Earth orbit (LEO).
The technology area breakdown structure (TABS) for TA07 includes 19 level 3 technologies, which are subdivided into 70 level 4 items. The envisioned schedule for this roadmap extends to 2035 with a human exploration mission to the surface of Mars.
The requirements for design and development of exploration destination technologies and their integrating systems will be driven by the varying environments of the selected destination, such as reduced gravity levels; the characteristics and chemistry of surface dust; atmospheric pressure and composition; etc. There are many commonalities among the various destinations which may result in common technology solutions, but there are also important differences that will drive the development of divergent technologies. As a result, human surface
![]()
1The draft space technology roadmaps are available at http://www.nasa.gov/offices/oct/strategic_integration/technology_roadmap.html.
exploration will require prior robotic mapping missions as well as in situ data collection such as was performed with the Moon before human lunar surface missions were conducted during the Apollo Program (e.g., Lunar Orbiter 1, Surveyor 1, 3, 5, 6, and 7). Successful ISRU technologies will depend upon the return of in situ samples to Earth for chemical analyses and subsequent development of processing equipment. For example, the approximately 722 pounds of lunar rocks and regolith returned to Earth during the Apollo missions has provided the basis for research involving the processing of regolith into structural and radiation protection materials. Similar materials research is required to develop the processes for water and oxygen extraction.
Prior to prioritizing the level 3 technologies included in TA07, several technologies were renamed, deleted, or added. The changes are briefly explained below and illustrated in Table J.1. The complete, revised TABS for all 14 Tas is shown in Appendix B.
Technology 7.2.1, Logistics Systems, has been renamed Autonomous Logistics Management to more fully include all elements of inventory and stowage control and to encourage development of technologies needed for autonomous capabilities that would ideally begin at the inception of a project and include all supporting vendors and suppliers.
TABLE J.1 Technology Area Breakdown Structure for TA07, Human Exploration Destination Systems
| NASA Draft Roadmap (Revision 10) | Steering Committee-Recommended Changes |
| TA07 Human Exploration Destination Systems | A number of technologies have been added, deleted, and renamed. |
|
7.1. In Situ Resource Utilization |
|
|
7.1.1. Destination Reconnaissance, Prospecting, & Mapping |
|
|
7.1.2. Resource Acquisition |
|
|
7.1.3. Consumables Production |
Rename: 7.1.3 ISRU Products/Production |
|
7.1.4. Manufacturing & Infrastructure Emplacement |
|
|
7.2. Sustainability & Supportability |
|
|
7.2.1. Logistics Systems |
Rename: 7.2.1 Autonomous Logistics Management |
|
7.2.2. Maintenance Systems |
|
|
7.2.3. Repair Systems |
|
| Add: 7.2.4 Food Production, Processing and Preservation (formerly a level 4 item under 7.2.1) | |
|
7.3. Advanced Human Mobility Systems |
|
|
7.3.1. Extravehicular Activity (EVA) Mobility |
|
|
7.3.2. Surface Mobility |
|
|
7.3.3. Off-Surface Mobility |
|
|
7.4. Advanced Habitat Systems |
|
|
7.4.1. Integrated Habitat Systems |
|
|
7.4.2. Habitat Evolution |
|
| Add: 7.4.3 Smart Habitats (formerly a level 4 item under 7.4.1) | |
|
7.5. Mission Operations & Safety |
|
|
7.5.1. Crew Training |
|
|
7.5.2. Environmental Protection |
Delete: 7.5.2 Environmental Protection |
|
7.5.3. Remote Mission Operations |
Delete: 7.5.3 Remote Mission Operations |
|
7.5.4. Planetary Safety |
Delete: 7.5.4 Planetary Safety |
| Add: 7.5.5 Integrated Flight Operations Systems | |
| Add: 7.5.6 Integrated Risk Assessment Tools | |
|
7.6. Crosscutting Systems |
|
|
7.6.1. Modeling, Simulations & Destination Characterization |
Delete: 7.6.1 Modeling, Simulations, and Destination Characterization |
|
7.6.2. Construction & Assembly |
|
|
7.6.3. Dust Prevention & Mitigation |
|
In the draft roadmap, Food Production, Processing and Preservation is just one element of technology 7.2.1, Logistics Systems. Given the importance and complexity of this topic, Food Production, Processing, and Preservation has been established as a new level 3 technology (7.2.4).
In the draft roadmap, technology 7.4.1, Integrated Habitat Systems, includes several elements, including Smart Habitats. The technologies associated with smart habitats are ubiquitous across all human space vehicles, and so Smart Habitats has been established as a new level 3 technology (7.4.3).
Technology 7.5.2, Environmental Protection, has been deleted because all elements of this technology are being treated in other roadmaps (e.g., radiation protection and thermal protection) or they are adequately handled by currently available technologies and design processes (e.g., electromagnetic interference and UV protection).
Technology 7.5.3, Remote Mission Operations, has been deleted because relevant technologies identified in this topic are more appropriately included in the roadmap for TA11 Modeling, Simulation, and Information Technology & Processing. However, the provision of training for and providing real time support for human missions has been added in 7.5.5, Integrated Flight Operations Systems.
Technology 7.5.4, Planetary Safety, has been deleted from this roadmap, but is captured within the Robotics roadmap. The content of this technology category, as described in the draft TA07 roadmap, focused on planetary protection involving robotic missions— that is, ensuring that robotic missions do not contaminate planetary destinations with biological agents from Earth (forward), and ensuring that robotic sample return missions do not contaminate Earth with alien biological agents (backward)). Similarly, it was observed that NASA planetary protection policies are limited to robotic missions. Until those policies are updated to provide guidance on human exploration, in compliance with recent COSPAR planetary protection policies, it would be premature to invest in new technologies relevant to planetary safety in TA07. With respect to Mars, relevant statements from the COSPAR Planetary Protection Policy of October 2002, as amended to March 2011, appear below:
Crewmembers exploring Mars, or their support systems, will inevitably be exposed to martian materials. In accordance with these principles, specific implementation guidelines for human missions to Mars include:
• Human missions will carry microbial populations that will vary in both kind and quantity, and it will not be practicable to specify all aspects of an allowable microbial population or potential contaminants at launch. Once any baseline conditions for launch are established and met, continued monitoring and evaluation of microbes carried by human missions will be required to address both forward and backward contamination concerns.
• A quarantine capability for both the entire crew and for individual crewmembers shall be provided during and after the mission, in case potential contact with a martian life-form occurs.
• A comprehensive planetary protection protocol for human missions should be developed that encompasses both forward and backward contamination concerns, and addresses the combined human and robotic aspects of the mission, including subsurface exploration, sample handling, and the return of the samples and crew to Earth.
• Neither robotic systems nor human activities should contaminate “Special Regions” on Mars, as defined by this COSPAR policy.
• Any uncharacterized martian site should be evaluated by robotic precursors prior to crew access. Information may be obtained by either precursor robotic missions or a robotic component on a human mission.
• Any pristine samples or sampling components from any uncharacterized sites or Special Regions on Mars should be treated according to current planetary protection category V, restricted Earth return, with the proper handling and testing protocols.
• An onboard crewmember should be given primary responsibility for the implementation of planetary protection provisions affecting the crew during the mission.
• Planetary protection requirements for initial human missions should be based on a conservative approach consistent with a lack of knowledge of martian environments and possible life, as well as the performance of human support systems in those environments. Planetary protection requirements for later missions should not be relaxed without scientific review, justification, and consensus.
Technology 7.5.5, Integrated Flight Operations Systems, has been added to support the development of capabilities to provide real-time support for spaceflight operations between a crewed vehicle and a mission control center with reduced ground-based staffing coupled with communications latency and/or extended loss of signal periods. The focus of this technology would be operational data management and related technologies to improve integrated vehicle-ground decision making to ensure mission success and safety of flight for missions beyond LEO. This technology represents an intersection between flight software development; Earth-based command and control, models, and crew training; and simulation, as applied to crewed vehicles and ground control systems.
Technology 7.5.6, Integrated Risk Assessment Tools, has been added to support development of new software tools for assessing integrated safety risks for varying exploration scenarios or Design Reference Missions (DRMs). These tools would improve the ability to assess the risk of various exploration and vehicle development strategies (for example, in terms of destinations, habitat deployment strategies, and the role of ISRU). Although the scoring did not result in a high-priority score, the panel recognized the need to complete this assessment prior to determining the sequence of human exploration destinations.
Technology 7.6.1, Modeling, Simulations & Destination Characterization, has been deleted because relevant technologies are more appropriately included in the roadmap for TA11, Modeling, Simulation, Information Technology & Processing. Destination characterization could be performed by robotic missions in order to safely inform the technologies and design of human missions.
TOP TECHNICAL CHALLENGES
The panel identified six top technical challenges for TA07. They are listed below in priority order.
1. ISRU Demonstration: Develop and demonstrate reliable and cost beneficial ISRU technologies for likely destinations (e.g., the Moon and Mars) to reduce the costs of and to enhance and/or enable productive long-duration human or robotic missions into the solar system.
ISRU capabilities directly impact the deployment and success of some future exploration missions. In planetary human space mission planning, the high cost of both up-mass and resupply has been a major hurdle. ISRU has the potential to greatly reduce these costs. ISRU also can greatly increase the human safety margin and likelihood of mission success and extend mission lifetimes for robotic missions. Key technology challenges are the in situ characterization of the raw resources, demonstration of resource recovery and beneficiation, establishment of the optimum processes under the right g-environment (using, for example, reduced-gravity aircraft, the ISS centrifuge, a free-flying tethered artificial-gravity satellite, or the lunar surface), and production of the strategic products necessary to support future explorations missions. The priority order of use areas is propellant, life support, and habitat construction. System analysis for a given transport scenario is required to validate the benefit of an ISRU capability to a particular mission. This system analysis needs to be conducted for every ISRU technology being considered for development. Positive benefits can result in smaller spacecraft, increased payload, lower cost, extension of mission life, and increased safety for human crews. Future human planetary surface exploration missions will require large launch masses and, as a result, high launch costs. ISRU technology development would seek to significantly reduce the launch masses and costs of these missions by producing the return-trip propellants (fuels and oxygen) at the exploration site. Additional benefits of developing ISRU technologies include the provision of life support resources (oxygen), volatiles for growing food (nitrogen, carbon, hydrogen, and oxygen), production of metals (aluminum, iron, and titanium), bricks, and other materials (concrete, ceramics, and glasses) for habitats, radiation protection, structures, other surface infrastructures, and other products. In order for ISRU to proceed, samples from prospective exploration sites must first be returned to Earth, simulants must be created, and testing of ISRU processes and technologies must be conducted in relevant environments.
2. Dust: Characterize and minimize the impact that dust in destination environments will have on extravehicular activity (EVA), rover, and habitat systems.
Dust is a critical environmental hazard for hardware tribology, surface solar power systems, instruments, and human habitat atmospheric systems. During the Apollo missions, dust was a problem for both EVA suit systems (clogging cooling sublimator) and human health (lung ingestion). Dust samples from the Apollo landing sites have been well characterized, but more information is needed about the composition and particle size of unexplored areas of the Moon and Mars. This information is needed to develop dust-mitigating technologies for EVA (self-shedding suit fabrics), design requirements for rover treads, and simulants for ISRU. Researchers have defined needs for Earth-based test chambers and ISS testing as appropriate.
3. Supportability: Invest in autonomous logistics management (ALM), maintenance, and repair strategies in order to reduce mission costs and improve probabilities of mission success.
Improving supportability (ALM, repair systems, and maintenance systems) for long-duration missions requires a “launch to end of mission” concept of operations that incorporates highly reliable, maintainable, and repairable systems with fully integrated ALM. Reuse and recycling also will be required to reduce the logistics burden of resupply (if resupply is factored in the design reference missions (DRMs) at all). Ideally, supportability systems should be integrated into the design of the systems themselves at the outset to ensure that vehicle systems can be easily maintained with a minimum of crew. Without resupply, with limited up-mass capabilities, and limited crew time for supportability tasks, requirements for future missions to distant destinations will surely require a very high level of reliability (greater than the ISS).
4. Food Production, Preservation, and Processing: Develop a food subsystem, as part of a closed-loop life support system, to provide fresh food and oxygen and to remove atmospheric CO2 during long-duration missions.
Food systems for long-duration missions are required in order to reduce the costs of up-mass and resupply, habitat volume, and consumables storage requirements at exploration sites. The production of fresh food would also address concerns that preserved foods may lose nutritional value during long missions. NASA and the Russian Space Agency have invested in both closed loop 1 g and microgravity food growth. Little work has proceeded to the point of processing fresh food in reduced-gravity environments. Human spaceflight to distant destinations requires that the nutritional needs of the crew be met for long periods of time. Enabling the production of food onboard and at destinations could greatly increase the probability of maintaining crew health throughout the mission.
5. Habitats: Develop space and surface habitats that protect the crew, implement self-monitoring capabilities, and minimize crew maintenance time.
Future human missions to distant destinations will almost certainly involve mission durations equal to or beyond those attempted on the Mir and the ISS, and mass will be much more highly constrained. While much is known in microgravity biomechanics, practically nothing is known about humans living, working, and being productive for long periods of time in reduced gravity environments such as the Moon and Mars. There is no data on neutral body postures, unsuited gaits, or work station configurations in reduced gravity, or even in such mundane design details as how high the ceiling should be for lunar or martian habitats. Future habitats will need to provide radiation shielding, accommodate long-term exposure to dust from surface environments, and provide a highly reliable habitable volume for months or perhaps years (in the event of an emergency). Future habitat designs will also need accommodate serious medical and surgical intervention, provision for world-class research equipment, and yet provide a comfortable and sustainable living environment.
6. Surface Mobility (Rovers and EVA): Develop advanced rovers and EVA systems for large-scale surface exploration.
The later Apollo missions clearly demonstrated the functionality of integrating rovers with human surface exploration. In the case of much longer missions to the Moon and ultimately Mars, enhanced surface mobility
at all levels, whether on foot, in unpressurized or pressurized roving vehicles, or using innovative solutions such as ballistic “hoppers,” will improve the science return of exploration missions. Current robotic missions to Mars provides us with the experience that there is little overlap between surface regions of greatest scientific interest (craters, hills, etc.) and areas suitable for safe landing (flat and expansive). A comprehensive program of geological exploration needs access to high slopes, loose and unstable surfaces, and the subsurface via drilling or excavation. Technology issues such as wheel-soil interactions, optimum mobility platform design, and high-reliability mechanisms with high tolerance for dust and exposure to extreme environments must be addressed to develop the systems that can achieve these goals. These technology challenges also exist for robotic telepresence systems (e.g., rover mounted cameras and robotic arms) which could be used for extending human exploration from surface habitats while constraining total EVA exposure.
QFD MATRIX AND NUMERICAL RESULTS FOR TA07
Figure J.1 summarizes the consensus scores of the 19 level 3 technologies in NASA’s draft Human Exploration Destination Systems. The panel evaluated each of these technologies based on the description of its content (at level 4) in the roadmap and in light of changes that the panel would make to the roadmap, as detailed above and in the discussion of individual high-priority technologies below. The scores shown below for each technology reflect the highest priority assigned to one or more level 4 topics within each level 3 technology. For the high-priority level 3 technologies (see Figure J.2), these key level 4 items are discussed in the section below on high-priority technologies.
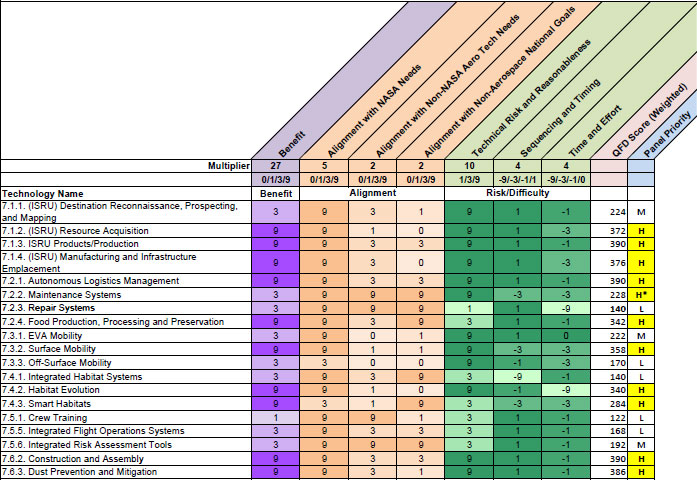
FIGURE J.1 Quality function deployment (QFD) summary matrix for TA07 Human Exploration Destination Systems. The justification for the high-priority designation of all high-priority technologies appears in the section “High-Priority Level 3 Technologies.” H = High Priority; H* = High Priority, QFD score override; M = Medium Priority; L = Low Priority.
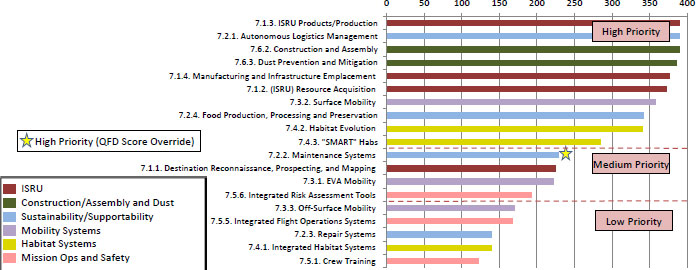
FIGURE J.2 Quality function deployment rankings for TA07 Human Exploration Destination Systems.
Figure J.2 graphically shows the relative ranking of each of the technologies. The panel assessed 11 of the technologies as high priority. Ten of these were selected based on their QFD scores, which significantly exceeded the scores of lower ranked technologies. After careful consideration, the panel also designated one additional technology as a high-priority technology.2 Note that the 11 “high-priority” technologies fall within the following groups: ISRU (3), Crosscutting Systems (2), Sustainability and Supportability (3), Advanced Human Mobility (1), Advanced Habitat Systems (2).
CHALLENGES VERSUS TECHNOLOGIES
The top technical challenges for TA07, as defined by the panel, were mapped against the panel’s high-priority technologies in this area (see Figure J.3). In general, there was good correlation, validating that investments in the high-priority technologies have the potential to make substantial progress in meeting the challenges.
HIGH-PRIORITY LEVEL 3 TECHNOLOGIES
Panel 4 identified 11 high-priority technologies in TA07. These technologies may be grouped into five high-priority theme areas: ISRU (3), Crosscutting Systems (2), Sustainability and Supportability (3), Advanced Human Mobility (1), and Advanced Habitat Systems (2). The justification for ranking each of these technologies as a high priority is discussed below.
In Situ Resource Utilization
The concept of using destination resources to enable a robust, sustainable, human and robotic exploration program is not new. It was an integral component of all prior successful exploration on Earth’s surface, and this philosophy continued into early lunar exploration development. NASA-sponsored work at Aerojet concerning the possibility of extracting oxygen from the regolith of the Moon occurred several years before Apollo 11 landed at Tranquility Base in 1969. In a paper written in 1961, scientists speculated that the cold traps at the lunar poles could
![]()
2In recognition that the QFD process could not accurately quantify all of the attributes of a given technology, after the QFD scores were compiled, the panels in some cases designated some technologies as high priority even if their scores were not comparable to the scores of other high-priority technologies. The justification for the high-priority designation of all the high-priority technologies for TA07 appears in section on High Priority Level 3 Technologies, below
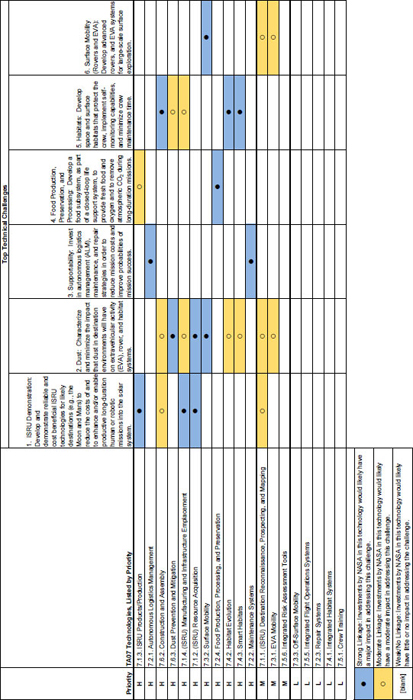
FIGURE 1.3 Level of support that the technologies provide to the top technical challenges for TA07 Human Exploration Destination Systems.
harbor water ice. This was determined conclusively in 2009 when LCROSS impacted the Moon in October of that year. Some of the processes have their challenges, but many of the basic chemical reactions trace their heritage back hundreds of years. It is clear that the technologies are within reach, and, some involving the Moon, have already garnered commercial interest. For example, over the past 5 years, NASA’s ISRU program, in partnership with small business, has built and demonstrated lunar oxygen production in a lunar analog environment. Early demonstration of lunar oxygen production capability could impact decisions regarding destinations and the manner in which missions are conducted. The importance of ISRU has been identified and confirmed by NASA-supported research and by a series of NRC studies over the past decades. The high-priority ISRU technologies are as follows:
• 7.1.3 ISRU Products/Production: Specific products to be produced from raw materials available.
• 7.1.4 Manufacturing/Infrastructure: Ability to make physical structures and complex products.
• 7.1.2 Resource Acquisition: Collection and acquisition of the raw materials needed to manufacture products.
Technology 7.1.3, ISRU Products/Production
ISRU Technology, Consumables Production (7.1.3), has been renamed ISRU Products/Production because ISRU products are expected to consist of more than just consumables (for example, radiation protection materials made from lunar or martian regolith). Future human planetary surface exploration missions will require large launch masses and concurrently high launch costs. ISRU technology development has the potential to significantly reduce the launch masses and costs of these missions by producing key products on the destination surface, such as the return-trip propellants (H2, HC, etc.); oxygen; water; metals (Si, Fe, Al, etc.); concrete materials; glass, ceramics, windows; fiber (from basalt), fabrics, textiles; other volatile materials (CO2, NH3, CH4, N2, He, etc.); plastics; and other hydrocarbon materials.
Mission analyses indicate that the use of lunar- and martian-derived propellants could reduce launch masses by over 60 percent. Additional benefits of developing the ISRU technologies include solar energy conversion, volatiles for growing food, and production of metals, bricks and materials for building habitats, structures, and general planetary surface infrastructures.
The panel’s assessment of this technology assumes that its content, as described in the draft roadmap, is modified somewhat. In particular, research in this technology would be enhanced by replacing the current level 4 items in Solids and Liquids Processing (7.1.3.1 and 7.1.3.2) with level 4 items that are focused on specific high-priority products to be made via ISRU, including oxygen; water; fuels (H2, HC, etc.); metals (Si, Fe, Al, etc.); concrete materials; glass, ceramics, windows; fiber (from basalt), fabrics, textiles; volatiles other than water (CO2, NH3, CH4, N2, He, etc.); plastics; and other hydrocarbon materials. As noted above, the processes for these products are generally different for the Moon and Mars due to differences in both surface chemistry and gravity.
Oxygen is likely the top priority for recovery and use on the Moon and Mars. Water is known to exist at the poles, but its accessibility is unknown. There are several potential methods for producing oxygen, including the use of carbon or methane reduction (carbothermal process), hydrogen reduction (lower yield), molten oxide electrolysis and several other methods. Water recovery is also vital for future exploration programs. Oxygen, hydrogen, and water can be used in propellants (fuels and oxidizers) and life support systems.
Key volatile (non-water) recovery from the regolith and cold traps (e.g., CH4, CO, CO2, NH3, Ar, N2, etc.) would be used by life support systems and other applications. Fuel production by processing water (H2O) and the Mars atmosphere (CO2) could enable production of H2, CH4, and other hydrocarbon fuels production on the Mars. Metals produced from the regolith (e.g., Si, Fe) could be used for solar cell production for power plants. Iron can be used for wire in a low-oxygen environment and as a structural material. Aluminum can be used for a wide variety of products.
Other building materials will be important for future low-cost infrastructure on planetary surfaces. New fabric technology using lunar and Mars materials could be of great benefit for future space settlement structures.
Oxygen production has a TRL in the range of 4 to 5. Advancing this TRL for lunar applications would require development of reduced-gravity excavation technologies, mineral beneficiation technology, and oxygen extraction
technology. The TRL of other elements of this technology are generally lower. Lunar and Mars concrete technologies are more viable than previously considered now that significant water appears to be available on the Moon and Mars. Efforts to develop production of water, fuels, metal feedstock, and building materials for in situ manufacturing could be integrated to accelerate their TRL and to give NASA the tools that it needs to inform exploration roadmaps beyond LEO.
This technology is well-aligned with NASA’s expertise, capabilities, and facilities, and it is a game changer for exploration. NASA, along with its industry and academic partners, can make a significant difference. Currently, it is not likely that commercial organizations or other federal agencies will invest in ISRU. Once NASA commits to a destination with a specified timeline, more investment by industry will likely take place. Other nations may invest is selected elements of ISRU technology (such as oxygen production and water recovery on the Moon).
The ISS can provide some environmental factors (e.g., most notably reduced gravity and vacuum) that would contribute to development of some ISRU technology and processes. An assessment of process effects as a function of gravity is necessary to mature these technologies, and the ability of the ISS to support ISRU technology development would be greatly enhanced if it were equipped with a substantial variable-gravity centrifuge facility.
This technology is considered game-changing because it would significantly reduce the cost of and enhance the productivity of long-duration human or robotic missions. The production of oxygen, water, fuel, metals, and building/construction materials would be particularly beneficial, and these capabilities would be in strong alignment with NASA’s human exploration program needs. Development of system components and autonomous plant operations also ranks high in benefits and alignment. Technical risks are considered a good fit for NASA: moderate-to-high risk. The greatest benefit would likely result from an initial focus on the production of polar water on the Moon. If the lunar focus bears fruit, it could change the architecture to explore Mars and, at the same time, potentially enable new commercial markets. A large quantity of water produced in situ and collected in a lunar depot could fundamentally change space exploration. If transferred to an orbital fuel depot, this water could be used to refuel orbit transfer stages, enabling the injection of large payloads to the Moon or Mars. The water could eventually form the basis of a cis-lunar economy, providing the impetus for commercial entities to supply NASA with ISRU products for ongoing space exploration missions.
Technology 7.1.4, Manufacturing/Infrastructure
The panel’s assessment of ISRU manufacturing/infrastructure technology assumes that its content, as described in the draft roadmap, is expanded somewhat. According to the roadmap, this technology would include in situ infrastructure (7.1.4.1), in situ manufacturing (7.1.4.2), and in situ derived structures (7.1.4.3). Research in this technology would be enhanced by expanding its scope to include regolith deep excavation for infrastructure (7.1.4.4), spare parts manufacturing (7.1.4.5), and regolith stabilization (7.1.4.6).
Excavating rock for emplacement of infrastructure (7.1.4.1) could likely involve mechanical excavators like rotary cutter heads or explosives. Fixed cutter heads currently used on Earth are optimized to excavate one particular type of rock. A variable-geometry cutter head can adapt its configuration to efficiently operate over a range of consolidated regolith and rocks to minimize energy requirements or maximize excavation rate. This capability is estimated to be at TRL 4. To move forward, a small, lightweight cutter head should be tested in simulated rock deposits expected on the Moon and Mars. Eventually, adequate operating lifetime and reliability will need to be demonstrated under simulated operating conditions at targeted destinations. The use of explosives could also be used as a low-mass and low-energy approach to excavate rock, but there are safety concerns with flying rock fragments. This is a common practice on Earth, but it has not been demonstrated for space applications (TRL 2).
The initial application of in situ manufacturing capabilities (7.1.4.2) is typically the manufacture of photovoltaic cells from lunar regolith. Vacuum deposition of silicon and iron feedstock material derived from lunar regolith is the key aspect of the process (TRL 3).
In situ derived structures (7.1.4.3), such as building materials created from regolith, could involve several methods, including the production of concrete, sintered blocks, processed glass or ceramics, and melted regolith. The ability to produce large quantities of water on the Moon and Mars would make the concrete option more feasible. Techniques to minimize the amount of water required have been advanced to TRL 4. Manufacturing sintered
regolith blocks in an oven has been demonstrated using electric resistance heating elements where the temperature of the regolith is uniform and controlled (TRL 4). Processed regolith from the carbothermal reduction process cast into glass or ceramic components is another option for making building materials (TRL 3). Processed regolith from the molten oxide electrolysis process can also be cast into glass or ceramic components. Molten oxide electrolysis can produce oxygen and alloys of Fe-Si-Al-Ti in the processed regolith that can be further refined into metallic products. The resulting processed regolith can also be cast into glass or ceramic components (TRL 3). Regolith melted with concentrated solar energy, microwave energy, or electrical resistance heating can be cast into glass or ceramic components. Molten regolith cast into glass or ceramic components is much stronger than sintered regolith. Melting the regolith requires more thermal energy than sintering, but sintering of regolith requires even heating and precise temperature control. Melting and casting of regolith does not require even heating or precise temperature control due to the higher thermal conductivity of molten regolith (TRL 4).
Deep excavation of dry, consolidated regolith for surface construction (Regolith Deep Excavation for Infrastructure, 7.1.4.4) can be achieved by vibration-assisted excavation, a variable-geometry cutter head, backhoe, etc. Vibration of cutting surfaces causes the regolith particles to fluidize, significantly reducing the forces required for excavation (TRL 4). The cutter head can adapted to the properties of the consolidated regolith to minimize the energy requirement or maximize the production rate (TRL 4). Backhoes are widely used on Earth to excavate holes, but they would require extensive modifications to survive and operate on the surface of the Moon or Mars (TRL 3).
Advanced techniques for spare parts manufacturing (7.1.4.5) on demand from ISRU materials include selective laser sintering, electron beam melting, fused deposition modeling, and 3-D printing. Metals from the regolith can be extracted as feedstock material by the carbothermal reduction or molten oxide electrolysis processes. The metallic iron produced by the carbothermal reduction process is immiscible in the molten regolith, so it separates itself into iron globules. Iron separation from the processed molten regolith has been demonstrated in crucible processing container in a laboratory environment. Silicon in the processed regolith would require additional processing to separate (TRL 3). The molten oxide electrolysis approach creates an alloy of Fe-Si-Al-Ti in the processed regolith that could be refined into metallic products (TRL 2-to-3). On Mars, the atmospheric CO2 can be used to grow excess plants to make components (TRL 4). The manufacturing of textiles, paper, insulation blankets, and structural beams from inedible biomass could be adapted from pulp molding technology currently used on Earth. This technology could be used to convert inedible biomass from plants grown for food production into useful components. These components can be continuously recycled to make new components using the same technology. Key challenges are to (1) optimize the required processing equipment to operate in the space or planetary environment by minimizing the mass, volume, and energy requirements and minimizing any Earth-supplied consumables required; (2) evaluate the various fireproofing techniques available; (3) investigate the incorporation of multiple waste materials (e.g., organics, plastics, etc.) into the final products; and (4) demonstrate the processing equipment in a relevant operating environment.
Regolith stabilization (7.1.4.6) to prepare roads, landing pads, berms, etc., to reduce dust and prevent damage from blast ejecta presents many potential areas of investigation:
• Sintering and/or melting of the regolith surface using concentrated solar energy (TRL 4). Direct use of solar energy is more efficient than conversion of solar energy to electricity to microwave energy or thermal energy. Sintering of regolith with concentrated solar energy can only be done in thin layers due to the low thermal conductivity of the regolith.
• Sintering and/or melting of the regolith surface using microwave energy (TRL 4). Microwave energy can sinter or melt a thicker layer of regolith than concentrated solar energy. However, there are inefficiencies in converting solar energy to electricity to microwave energy to thermal energy.
• Sintering and/or melting of the regolith surface using electric resistance heating (TRL 4). Sintering of regolith with electric resistance heating elements can only be done in thin layers due to the low thermal conductivity of the regolith. The efficiency of converting electricity to thermal energy is higher than with microwave heating.
• Adding compounds to the regolith to significantly increase its cohesion and create a consolidated surface (TRL 3). A low-energy process that does not require a thermal energy source is sought. However, this approach probably requires Earth-supplied additives such as polymers.
• Placing flexible textile or rigid covers on the regolith surfaces (TRL 3). This may be a low-energy process if the cover material is shipped from Earth. In situ production of the cover material from regolith may be energy intensive. In situ production of the cover material from inedible biomass would be less energy intensive.
This technology is well-aligned with NASA needs. It is not likely that others will invest in this technology.
A study evaluating which processes relevant to this technology could be developed using the ISS would be very beneficial.
This technology is rated high because of the potential for reducing launch costs through reduction of up mass volume and mass. Alignment to NASA programs is also very high, and success in this technology could enable new mission capabilities.
Technology 7.1.2, Resource Acquisition
This technology pertains to collecting and acquiring the raw materials to be used and/or processed into the appropriate product or use. The panel’s assessment of ISRU manufacturing/infrastructure technology assumes that its content, as described in the draft roadmap, is expanded somewhat. According to the roadmap, this technology would include regolith and rock acquisition (7.1.2.1), atmospheric acquisition (7.1.2.2), and material scavenging and resource pre-processing (7.1.2.3). Research in this technology would be enhanced by expanding its scope to include cold-trap technologies (7.1.2.4), shallow excavation of dry regolith (7.1.2.5), and excavation of icy regolith (7.1.2.6).
Regolith and rock acquisition and mining machines include cutting tools and drills, scoops, lifting and rotating gears, seals, bearings, actuators, dust filters, electric motors, containers and storage handling equipment, crushers and grinders, and beneficiation devices. For atmosphere acquisition of CO2, Ar, etc. on Mars, advanced compressors, sorption tools, or freezers are required.
Development of recycling and pre-processing technologies for the ISS, lunar habitats, and Mars habitats would minimize or eliminate the waste storage problem currently experienced by the ISS.
Recovery of water and other gases from the cold trap regions of the Moon will require new technologies because of the extreme environmental conditions expected. In the permanently shadowed areas at the lunar poles, typical ambient temperatures may be less than 70 K. New technologies will be needed to enable mechanical, electrical, and fluid systems to function in temperatures that are much colder than those experienced by conventional machinery designed for terrestrial operations. Subsystems and components of concern include bearings and lubricants, electrical motors, electrical components, computers, microprocessors, chips, contacts, rotating joints, fluid lines, fluid valves, and fluid regulators. Planetary surface hoppers that can quickly fly in and out of the cold trap regions may mitigate problems associated with these cold environments.
Shallow excavation of dry regolith will be a major part of surface and infrastructure preparation on planetary surfaces. Pneumatic regolith excavation reduces the amount of moving components exposed to the abrasive regolith. However, a source of gas is required. In contrast, the only direct consumable required is energy for mechanical excavation. However, the cutting surfaces and moving components will require periodic replacement due to wear from the regolith. Cutter heads are widely used on Earth, but they would require extensive modifications to survive and operate on the Moon or Mars.
Excavation of icy regolith (frozen water with the regolith) will likely be a challenge in the recovery of water on the Moon and Mars. Cutter heads which can adapt to changes in icy regolith deposits will minimize energy requirements and maximize production rate.
Regolith mining devices are generally at TRL 3 to 5. Previous low-level funding resources have been applied to some mining devices over the years, but much more detailed technology development is required to achieve higher TRLs. Technology for Mars atmosphere collection is currently at TRL 6.
This technology is well-aligned with NASA needs. It is not likely that others will invest in this technology, although some advances may have terrestrial applications. For example, a variable geometry cutter head configuration designed for use on the Moon may useful on Earth in certain situations. Advances made by this technology in acquisition devices, mining machines, volatile extraction devices, heat recovery systems, and resource pre-processing/beneficiation may also improve some processes and practices on Earth.
The ability of the ISS to support development of this technology would be greatly enhanced if it were equipped with a substantial variable-gravity centrifuge facility.
This technology is critical to ISRU as it relates to the human exploration program. Without resource acquisition the cost and other benefits of ISRU would not be available. In some cases, this technology may have terrestrial applications. For example, a variable geometry cutter head configuration designed for use on the Moon, might be applicable to Earth in certain situations. In addition, success with this technology could potentially lead to commercial mining of Helium-3 from the lunar regolith as an energy source.
Crosscutting Technologies
Crosscutting technologies contains two high-priority level 3 technologies:
• 7.6.3 Dust Prevention and Mitigation
• 7.6.2 Construction and Assembly
Both of these technologies are dependent on the properties and environments of the destinations.
Technology 7.6.3, Dust Prevention and Mitigation
Dust prevention and mitigation addresses a potential human health and systems performance risk for missions to the Moon and Mars. In addition, recently returned data on asteroids, which may also consist of a mixture of dust and rubble, indicate that dust may also pose a risk to asteroid missions as well. The development of technologies that mitigate the deleterious effects of dust will require knowledge of the chemistry and particle size distribution of the dust. Surface rovers will require detailed knowledge of surface chemistry and morphology in order to design traction devices and to understand tribological effects. Interviews with Apollo crewmembers have shown that the lunar dust was not effectively dealt with during the Apollo program. Dust infiltrated every part of the lunar module (even underneath the fingernails of the crew). Given the relatively short duration of the lunar EVAs and the lunar stay, the risks to crew health and mission success were tolerable, but not without risk. In one incident, lunar dust covered the EVA suit sublimator, the crewmember overheated, and the surface EVA was nearly terminated. The threat posed by dust will increase for missions that entail longer stays and/or more EVAs, or which involve dust properties that humans have not yet encountered (e.g., on Mars).
The draft roadmap for TA07 does not make any substantial progress on crew-related dust prevention until approximately 2029 for crewed Mars missions, after a mission to a near-Earth asteroid (NEA). Dust mitigation for a crewed NEA is insufficiently defined and could introduce poorly characterized dust into the spacecraft following an asteroid EVA. The roadmap notes the technology needs for both prevention and mitigation. Mitigation is defined as “remove or tolerate excessive dust build-up.” In the interest of ensuring crew safety and health, a firmer universal requirement to prevent dust intrusion into habitable areas may be advisable. In addition, the draft roadmap for TA06, which includes the design and development of EVA systems and components, does address dust prevention or mitigation, even though lunar or martian dust may be a design driver for suit components such as shoulder, waist, and glove bearings and interfaces. Further, the adverse impacts of dust could drive human-rover interface design and functionality to maximize crew safety and health as well as science return.
The ability to effectively simulate the effect of martian soil on a suited EVA crewman is not readily available. Understanding and reproducing the nature of the soil, including its magnetic and microscopic properties, is essential to effectively preclude dust intrusion. Section 7.6 of TA07 identifies the need for “simulant beds inside vacuum chambers” as a needed technology, but it is unclear whether this includes the capability to demonstrate
suited crewmember operations in the dusty environment, at Mars atmosphere (let alone at Mars gravity-level), all of which can impact EVA mission success. Robotic precursor missions will be important to advance the TRL of dust prevention and mitigation technology tailored to meet the needs of specific landing sites.
Habitat designs will need to include technologies for the prevention of dust intrusion and for sequestering dust that does intrude into the habitable volume. The behavior of generic dust has been researched in a microgravity environment on prior space shuttle and Spacelab flights, and this data may be useful in determining properties if dust invades future exploration vehicles prior to their return. The ability of the ISS to support development of this technology would be greatly enhanced if it were equipped with a substantial variable-gravity centrifuge facility.
Dust prevention and mitigation could be a game changer for planetary surface operations and crew health by significantly reducing mission risk, increasing crew safety, and increasing the potential for mission success.
Technology 7.6.2, Construction and Assembly
Other than large module berthing and utilities installation, which has been performed routinely in the construction of the ISS, most of the functionality of the Construction and Assembly technology are readily available on Earth, but they have not been adapted to spaceflight. This technology includes assembling structures in space that are too large and/or too massive for a single launch vehicle. This technology would allow future missions to move beyond deployable structures (e.g., the James Webb Space Telescope) or modular assembly (e.g., the ISS) to erectable structures, including possibly significant use of structural components obtained and fabricated in situ. This technology is also relevant to reduced gravity environments and the use of ISRU technologies for large-scale movement and positioning of regolith to cover components for environmental protection, to improve landing sites to enhance safety and mitigate dangers from secondary ejecta, etc.
Earth-based construction and assembly techniques typically assume the presence of Earth-normal gravity and atmosphere, as well as plentiful water. These techniques need to be revised to accommodate the harsh environment of extraterrestrial destinations and the mass, power, and consumables limitations of spaceflight. Given these unique demands, NASA will need to lead the development of this technology, while drawing on applicable expertise in industry, academia, and other government agencies. The vast majority of technology transfer in this area will be from Earth-based processes and technologies into NASA.
The ISS is both an existing example and an excellent test bed for microgravity assembly techniques. However, it is of limited or no utility for testing surface construction techniques such as regolith moving and collection.
Construction and assembly technology is essential for many future space missions, both manned and unmanned. Large-scale science facilities in both the optical and radio spectrum are pushing the limits of current capabilities with deployable structures and may need to rely on on-orbit assembly to advance in size and capabilities. Surface construction capabilities will be required to establish permanent facilities on the Moon or Mars. Current understanding of the effects of galactic cosmic rays reveal few feasible approaches to significant reduction of deleterious effects on biological organism other than the use of mass shielding, which would be much more economical using construction with in situ materials. Sintering of landing pads would reduce the threat posed by secondary ejecta. In-space assembly of advanced systems, whether astronomical telescopes or Mars transport vehicles, requires productivity levels and reliability currently obtainable only in ground-based facilities. Hardware developed for this technology will need to accommodate the harsh, dusty environments of extraterrestrial destinations. Most construction hardware on Earth is made robust and accurate by the use of massive body components, which will not be feasible for space systems. Active controls and highly redundant actuators may be needed to reduce system and component mass while maintaining system stiffness and strength.
Sustainability and Supportability
Missions beyond LEO will be limited in the amount of logistical support available, including spare parts and systems. Requirements for spacecraft reliability and maintainability will likely increase as mission duration and transit time to the destination increases. The ISS must be continually maintained and resupplied. This has been facilitated by its close proximity to Earth; it can be reached within 48 hours after launch, and in an emergency,
the crew can evacuate and return to Earth in less than 2 hours. However, the life support systems on the ISS must be continually resupplied and maintained, and while some atmospheric and water systems are reaching a closed loop status, the food system is not. Also, the ISS is continually refueled to enable control of attitude and altitude. ISRU capabilities will meet some of these requirements for missions to the Moon or Mars, but does not mitigate the risk during the transit mission. The high-priority sustainability and supportability technologies are as follows:
• 7.2.1. Autonomous Logistics Management
• 7.2.4. Food Production/Processing/Preservation
• 7.2.2. Maintenance Systems
Technology 7.2.1, Autonomous Logistics Management
For the purpose of this study, autonomous logistics management (ALM) includes the integrated tracking of location, availability, and status of mission hardware and software to facilitate decision making with respect to consumables usage, spares availability, and the overall health and capability of human exploration mission vehicles and habitats and their subsystems. An ALM system might incorporate radio frequency identification (RFID), electro-optical scanning devices, built-in-test systems, and automatic health monitoring. The system would automatically update the location of hardware items as they were moved around the vehicle or habitat, track life cycle times and condition of equipment, and inform the mission team of resupply needs based on that information as well as mission recycle and reuse strategies. Although integrated ALM systems have been demonstrated in various ground systems, none have been used in NASA programs. For space applications, ALM technology is at approximately TRL 4.
Experience onboard the ISS has shown the significant benefit that ALM technology could provide, given the mass and volume of logistics delivered to the ISS on an annual basis. The ISS would be an ideal test bed for this technology and provide a basis for defining requirements for future transit and planetary habitats.
Exploration missions will have small crews and limited ground communications, necessitating numerous and reliable autonomous systems. ALM technologies would significantly reduce requirements for crew time and for ground-based flight controller time. By having all of this information readily available in a single repository and automatically updated would allow the crew and mission team to quickly assess the effects of system or subsystem failures on the logistics train and allow reprioritization of resupply and/or rationing of critical spares and consumables. The potentially long duration of future missions coupled with long response times for resupply makes it imperative that the mission team know the failure tolerance of the integrated system with respect to available resources and the resupply chain. An ALS system could also factor in the ability of ISRU systems to generate supplies locally.
Technology 7.2.4, Food Production/Processing/Preservation
In the draft roadmap for TA07, this technology is a level 4 item (7.2.1.2) under 7.2.1 Logistics Systems. The scope of this technology includes light sources, water delivery methods, harvesting methods, and preservation methods. Ideally, technologies for the processing of food waste should be coordinated with development of ISRU technologies because food waste is a potential source of organic material. The management of food resources is critical to provide the crew with a healthy diet and reduce the launch mass (and cost) of exploration missions, including resupply missions. The nutritional value of foods on the ISS appears to degrade with time, and some fresh food may be required for a long-duration mission. Food production can also consume CO2 and generate oxygen for the crew. However, the effects of microgravity on plant growth have been documented, but the effects of reduced gravity at 1/6 g or 3/8 g are largely unknown.
NASA has extensive experience in terrestrial production, processing, and preservation of food for use in LEO. In addition, plants have been grown and harvested in space-analog 1-g closed loop laboratories. Some plants have been grown in microgravity aboard the space shuttle, the Russian space station Mir, and the ISS, but food has not
been processed in space, and the technology for harvesting, packaging, and preserving food in reduced gravity is at a very low TRL. Plant growth at 1/6 g and 3/8 g has not yet been demonstrated.
Development of this technology for extended exploration and reduced gravity is of interest to NASA alone.
The ISS is an excellent location for microgravity testing of this technology in the microgravity environment that would be experienced during a transit to Mars, for example. The ability of the ISS to support development of this technology for surface applications would be greatly enhanced if the ISS were equipped with a substantial variable-gravity centrifuge facility. In any case, development of this technology may require more dedicated equipment racks on the ISS to allow for the processing and preservation of food products, as well as oxygen capture.
The primary benefits of this technology include the ability to sustain crew health for extended periods through augmentation of the oxygen supply, recycling waste for ISRU applications, and reducing resupply and launch mass requirements and associated costs. This technology may have applications for remote stations, such as in Antarctica, and improved food preservation technology might also have military applications (for combat rations that are stored for long periods of time).
Technology 7.2.2, Maintenance Systems
This technology includes four level 4 items: 7.2.1.1 Intelligent/Smart Systems; 7.2.2.2 Non-Destructive Evaluation and Analysis (NDE); 7.2.2.3 Robotic Systems for Maintenance, and 7.2.2.4 Contamination Control and Clean-up. Maintainability and reliability are key requirements for any system or subsystem within exploration vehicles and habitats. The inability to return faulty equipment to Earth for repair during a mission, coupled with potentially long resupply times, enhances the value of equipment designs that facilitate servicing by the crew— or eliminate the need for crew servicing. Each element of this technology would achieve those goals.
Robotic systems have matured to a high TRL with the deployment of Robonaut, but the other elements of this technology have generally not been tested in space or in the reduced-gravity environments of the Moon or Mars (or capabilities demonstrated to date are problematic), and so most of this technology remains at low TRLs (less than 4).
Some elements of this technology may be of interest to non-NASA industries and could lead to teaming with companies that require similar technology development for the maintenance of complex systems.
The ISS would be an ideal test bed for some intelligent maintenance systems technologies and for contamination and control. It currently is a test bed for robotic EVA support.
The panel overrode the QFD score for this technology to designate it as a high-priority technology because the QFD scores did not capture the value of this technology in terms of value to habitat and vehicle development, especially since designs should incorporate these capabilities early in the process.
Advanced Human Mobility Systems
Surface Mobility, 7.3.2, is the only level 3 technology in the Advanced Human Mobility Systems theme area that was determined to be high priority. As detailed below, EVA mobility (7.3.2) is important, but it should probably be integrated with EVA suit design in the roadmap on TA06, Human Health, Life Support, and Habitation Systems. Crew-operated vehicles for use with asteroids will also require new technology development, especially as it relates to station keeping on a rotating body, as most asteroids are expected to be in varying rates of rotation about one or more axes.
Technology 7.3.2, Surface Mobility
As described in the draft roadmap for TA07, Surface mobility technology (7.3.2) is composed of four topics: 7.3.2.1 Rovers and Pressurized Rover, 7.3.2.2 Hoppers, 7.3.2.3 Advanced Surface Transport (such as rail guns, anchoring, zip lines, and maglev pneumatic tubes), and 7.3.2.4 Berthing and Anchoring for application to NEAs. Surface mobility technologies are a high priority for missions to the Moon and Mars because they enable several
mission critical capabilities. For example, they allow scientific research over a large area from a single landing site and they make dispersed landing areas acceptable.
Investment in unpressurized rovers and pressurized rovers (life support, thermal control, power supply, communications, traction devices, etc.) should be considered the highest priority element of this technology. Experience with the Apollo program’s lunar rover in the early 1970s was relatively successful, and it generated lessons learned applicable to future lunar and Mars vehicles carrying humans. Experience with the Mars surface has been gained by robotic rovers, but at very low velocities and with limited range. Additionally, prior rovers had no pressurized compartments and were not designed with human radiation protection in mind.
Technology for advanced surface mobility systems for humans is approximately at TRL 4. Berthing and anchoring technologies for NEA applications is at or below TRL 3. However, anchoring may be problematic if the asteroid surface is composed primarily of dust and rubble, as was recently determined for Phobos. Berthing with an asteroid having a gravity level of approximately 0.001 g is probably better described as station keeping.
NASA is the only entity which has requirements for these technologies. NASA has produced lunar and Mars rovers, and development of this technology is well aligned with agency goals.
Because surface mobility is primarily associated with the reduced-gravity environment on the surface of the Moon or Mars, the utility of the ISS as a test bed is limited. However, if human piloted vehicles are envisioned for NEA proximity operations where there is no significant gravitational attraction, then the ISS would provide an early and relatively safe test bed for related technologies.
Enhanced surface mobility would provide access to large portions of the surface of the Moon or Mars from a single landing site, it would greatly simplify the logistics plan and reduce the resources needed for exploration (in support of scientific objectives and establishing ISRU capabilities), reducing the need for multiple habitats and backup life support systems, and reducing the risk associated with requiring additional launches to place assets where they are needed. Also, if multiple surface facilities are established for whatever reason, enhanced surface mobility would facilitate the movement of personnel and cargo for routine and emergency operations.
Advanced Habitat Systems
The high-priority technologies in the advanced habitat systems theme area are as follows:
• 7.4.2 Habitat Evolution
• 7.4.3 Smart Habitats
The panel rated these technologies as high priority because of their importance to enabling the exploration vision with respect to space-based habitats as well as surface habitats. Both of these areas are also closely aligned with investments in two other high-priority theme areas: Sustainability and Supportability and Crosscutting Technologies (see above). Therefore the technology investments in each of these theme areas should be closely coordinated so that they can be effectively integrated.
Technology 7.4.2, Habitat Evolution
Habitat evolution consists of four level 4 items: deployable habitat destination structures; interplanetary space habitats; artificial gravity; and advanced, integrated habitat shells. Potential applications described in the roadmap include habitats in high Earth orbit (HEO) that would be constructed in LEO and gradually moved to a higher orbit. Eventually, if moved closer to the lunar surface, they could incorporate the use of substantial in situ resources (such as lunar regolith) for shielding to reduce cosmic radiation exposure. Similarly, if feasible at some point in the future, a rotating artificial gravity habitat could allow research into the long-term effects of reduced gravity levels on biological organisms. A rotating spacecraft that provides Earth-normal gravity levels in crew quarters is the one method currently known to avoid musculoskeletal deconditioning in long-term spaceflight, but it is not currently feasible due to the required rotation radius, variable gravity along the radius, and induced coriolis effects on the
human vestibular system. However, technology demonstrators could be evaluated and pursued once experiments determine the minimum gravity-level necessary to prevent adverse health effects.
The various elements of this technology are generally at a very low TRL (1 to 2). Advances are needed in materials, environmental control and life support systems (ECLSS), radiation protection, and smart systems.
This technology is unique to NASA, but some elements could conceivably have applications to the commercial sector and the broader research community in the future.
The ISS, as currently configured, is not well suited to initial research and early flight testing of new habitats. The addition of docking adapters could improve the utility of the ISS for in situ research and technology testing. The ISS could also become a staging platform for the release of habitats which would cycle between the lunar Lagrange points and temporary habitats at the ISS, which could be used for quarantining crews returning from missions to Mars or other offworld destinations.
Habitat evolution is of critical importance as a solution to problems in long-duration human spaceflight. Advanced conceptual habitat systems would advance the state of the art, provide a higher level of safety and reliability, and mitigate the long-term effects of microgravity and/or radiation exposure to crew on prolonged transits to and from remote destinations.
Technology 7.4.3, Smart Habitats
This topic area involves the development of advanced avionics, knowledge-based systems, and potential robotic servicing capabilities to create long-term habitats with significantly reduced demands on human occupants for diagnosis, maintenance, and repair. In the draft roadmap for TA07, Smart Habitats was a level 4 item in technology 7.4.1, Integrated Habitat Systems. The panel established Smart Habitats as a distinct level 3 technology because of the importance of this technology to future space exploration.
This technology is currently at TRL 3 to 5, primarily in “concept homes” for Earth-based applications. Some limited efforts are underway to incorporate smart habitat capabilities into experimental habitats for field simulations of NASA-relevant missions. NASA is the logical choice to pursue smart habitats for space applications.
The ISS could be used as a test-bed for development and initial operational assessment of smart habitat technologies.
Studies of crew time during Skylab showed that the three crews typically worked one 8-hour day performing science experiments and a second 8 hours each day to maintain and service habitat systems. When the ISS had three-person crews, about 2.5 crew were required to maintain station systems, with only one crewmember available half-time for science activities. In addition, a large ground staff is required around the clock for ISS system monitoring, stowage tracking, and crew operations planning. Smart habitats would minimize these requirements, and they will be increasingly valuable for habitats on remote missions far from Earth.
This technology will advance habitat systems that augment the crew by providing many of the functions currently performed by mission control or the crew itself. Systems parameters will be internally monitored, and adaptive expert systems will detect off-nominal conditions and provide immediate diagnosis onboard. Sensors will detect the use and stowage locations of the thousands of components onboard the habitat, and will aid the crew in locating specific components needed for tasks. Onboard planning and optimization programs will provide simple graphical user interfaces to allow the crew to have real-time input on workload planning, easing crew concerns about a lack of control of their efforts. In the ultimate form of the “smart” habitat, robotic systems could perform routine maintenance during crew sleep cycles, or even on a “not-interference” basis with the nominal crew activities.
MEDIUM- AND LOW-PRIORITY TECHNOLOGIES
Human Exploration Destination Systems includes eight level 3 technology topics that ranked low or medium priority. The technology areas in this grouping included one from ISRU, two from Advanced Human Mobility Systems, three from Mission Operations and Safety, one from Sustainability and Supportability, and one from Advanced Habitat Systems. Two technology areas were added to ensure completeness of the TABS for Mission Operations and Safety. Integrated Flight Operations Systems has been added to the roadmap to develop capabilities
for real-time software/data management tools to support spaceflight operations between a crewed vehicle and a mission control center beyond LEO where the communications environment is characterized by reduced ground-based staffing, significant communications latency, and/or extended loss of signal (LOS) periods. The focus of this technology would be to support integrated vehicle-ground decision making to ensure mission success and safety of flight. This technology represents an intersection between vehicle flight software development; Earth-based command and control software; and advanced training simulators for both the crewed vehicles and ground-based mission control centers. Integrated Risk Assessment Tools was added to support development of new software tools for assessing integrated safety risks for varying exploration design reference missions (DRMs) beyond LEO. It extends beyond the current PRA (probabilistic reliability assessment) tools by improving the ability to assess the relative risks for varying destinations, to include ECLSS, reliability, human health risks, software vulnerabilities, and use of ISRU. This was assessed as medium priority by the steering committee.
Five of the eight were assessed as low priority and placed in this category either because investments could be deferred for at least 5 years until other related technologies mature or destinations are selected, or because there were marginal benefits within the next 20 years. Vehicle and habitat repair materials and adhesives will depend upon the vehicles and habitats selected. Off Surface Mobility is highly dependent upon knowledge of the environments for defined destinations. Atmospherically buoyant transports and martian atmospheric fliers are marginally beneficial in the near term and will require supporting feasibility studies. Integrated Habitat Systems largely addressed new materials which also should be incorporated into the materials roadmaps. (Smart Habitats was moved out of this category and rated “high.”) Crew Training and Integrated Flight Operations were rated low because they are considered to be evolutionary rather than revolutionary research technology areas, but the steering committee also recognized that early investments in these areas could help to inform decisions in future spacecraft and habitat design.
Two remaining highly diverse technology areas were rated medium priority: EVA mobility is considered extremely important to provide the maximum flexibility to the crew to perform planned and unplanned mission critical tasks outside of the primary vehicle, but also is dependent upon vehicle and destination selection. Mobility should be designed in coordination with EVA suits. Supporting technologies include power-assisted exoskeletons, EVA transition systems and mobility aids, tools, and telerobotic support. Destination Reconnaissance, Prospecting and Mapping is important to the ISRU and science effort, but is expected to be accomplished through unmanned spacecraft before crews are utilized via rovers. Sample Collection and Characterization (e.g., Dust) had the highest rating among the level 4 categories.
DEVELOPMENT OF TECHNOLOGIES, DESTINATIONS, AND NOTIONAL SCHEDULES PRESENTED IN THE TA07 ROADMAP
This section addresses the maturity of the technologies (their TRLs) in the draft roadmaps for TA07, Human Exploration Destination Systems, in the context of the strategy for integrating them within the framework of the exploration mission sequence and identified destinations and schedules. These comments are also generally applicable to the draft roadmap for TA06, Human Health, Life Support, and Habitation Systems.
The draft roadmap for TA07 contains few detailed development schedules and milestones at level 3, but it does include broad goals and exploration mission destinations and missions in a one-page chart. These are summarized in Figure J.4. This mission profile does not include mission to the Moon, but it does include a HEO habitat in 2020, an NEA/near-Earth object (NEO) mission in 2025, a mission to Phobos (the moon nearest Mars) or Mars orbit in 2030, and a mission to Mars in 2035.
The panel mapped each of destinations in the roadmap to known destination environments as shown in Figure J.5. For comparison, this figure also includes additional destinations: Earth, Lagrange points, and the Moon. Many environmental variables are yet to be defined for some of these destinations, particularly with respect to Mars, Phobos, and NEAs/NEOs. However, these are the key variables that drive technology development and subsequent system design. Dust is not included in Figure J.5, but it is a factor for missions to the Moon, Mars, and NEA visits.

FIGURE J.4 Human exploration mission schedule defined in TA07 roadmap.
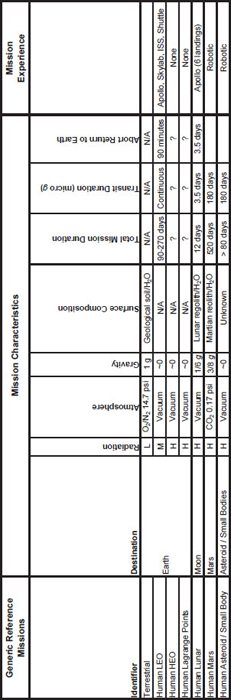
FIGURE J.5 Human exploration design environments.
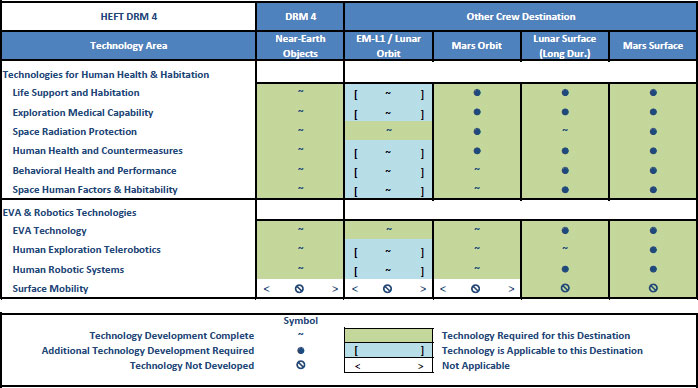
FIGURE J.6 Consolidated chart from the 2010 NASA HEFT report Technology Progress Towards Other Destinations.
Atmospheric pressure at the destinations in Figure J.5 range from 760 mm on Earth with an oxygen/nitrogen gas mixture to vacuum on the surface of the Moon. Gravity levels range from 1 g on Earth to 3/8 g on Mars to 1/6 g on the Moon, to 0.000001 g on the ISS. Radiation protection is best provided on Earth: physiological effects from radiation exposure is slightly more risky in LEO and significantly more risky once the protection of Earth’s electromagnetic field is left behind on the way to all other destinations. Adverse health effects from both microgravity and radiation increase with mission duration and distance from Earth. Radiation protection and the reliability of life support systems are pacing technologies with respect to distance from Earth and mission duration.
The panel reviewed the NASA Human Exploration Framework Team (HEFT) Phase 1 Closeout report (2010), which maps technology development status against possible future exploration destinations (Figure J.6).
Requirements Linked to Destinations
Developing single technologies to satisfy the needs of multiple missions without regard to the different environmental characteristics at those destinations is problematic. From an engineering and technology development perspective, destination characteristics will drive engineering design requirements, science objectives, development schedules, and test facility requirements. The history of NASA space missions confirms that differences in gravitational levels, atmospheric composition, surface compositions, and radiation environments frequently calls for different design solutions. For example, the parametric relationship between 1 g and microgravity (or zero gravity) is not known for fluid physics, combustion, and human health (bioastronautics), or for those technologies related to crew health, life support systems, spacesuit cooling, etc. Assumptions that these processes are linear between 0 and 1 g are probably incorrect for most phenomena. In fact, recent research at NASA Glenn in combustion with drop towers indicates that combustion processes vary in a nonlinear fashion at different gravity levels. Current knowledge of liquid behavior at microgravity is still incomplete as is continually demonstrated by the failures in the ISS Life Support Systems. ISRU processes, which could be developed on the Moon for extraction of oxygen and water resources may not work on Mars because of differences in gravity, regolith chemistry, and heat transfer
characteristics. Even so, data acquired from reduced-gravity operations on the Moon could be instrumental to development of oxygen and water extraction processes on Mars, by enhancing diffusion and heat transfer models that are currently validated only at 1 g and microgravity. Similar data is required for understanding human bone loss in microgravity: it is suspected that there is a threshold for g, but it is not known.
In the Apollo program, NASA made incremental steps in technology development, addressing each risk and testing at the highest TRLs in flight like environments before deploying humans. Lunar missions were preceded by multiple LEO missions in which life support systems were tested, bio-medical tests were conducted, and the effects of microgravity were evaluated on gas and liquid based systems. A similar strategy would benefit the current technology development program as it prepares for an unprecedented mission to Mars.
From a budget perspective, it would seem appropriate to organize technology development so that projects intended to support the same mission will move forward in a coordinated fashion. If destinations are not identified and scheduled early, the goals and schedules of various technology development efforts could be out of sync with each other and with larger agency goals. If funding is sufficient to support a broad technology effort, then research focused on multiple destinations could be conducted simultaneously.
Microgravity Testing on the Space Station
The ISS and its hypothetical LEO successor(s), like its predecessors Skylab and the space shuttle/Spacelab, will be required for microgravity research and technology development as long as the United States continues to explore beyond LEO. In addition to its general research mission for terrestrial applications by NASA, industry, and academia, the ISS also supports exploration research and technology development. During transit between Earth and destinations such as the Moon, Mars, and NEAs, astronauts will experience microgravity for periods ranging from 3 days to 9 months. Space stations in LEO provide the only near-Earth, long-duration microgravity environment for human bioastronautics research, technology development, and systems certification.
Space stations in LEO may also serve as future transfer points for astronauts returning to Earth from the Moon, Mars, or other destinations, especially if quarantine is required. The ability of a space station in LEO to support development of technology for surface missions to the Moon or Mars would be greatly enhanced if it were equipped with a substantial variable-gravity centrifuge facility. If rotating space vehicles are to be developed, some of the fundamental research into the behavior of systems and biology in reduced gravity could also be conducted on station-based centrifuges. Fundamentally, as long as exploration continues beyond LEO, LEO research stations will probably be required for advancing research and development, and perhaps for providing operational support. The ISS and its successors provide the optimum high-fidelity environment for microgravity research which is also close enough to Earth to provide astronauts with the ability to quickly return to Earth in case of an emergency.
Microgravity Testing on the Moon
The Moon is not included as a destination in the draft roadmap for TA07, although lunar missions are included in the 2010 NASA HEFT report. Also, the Moon is the closest destination to Earth that enables long-term research and testing in a reduced-gravity environment (significantly less than the 1 g of Earth and significantly more than the microgravity of the ISS). Other possible destinations, such as Phobos or a NEA, also experience essentially zero gravity), and so do not lend themselves to reduced gravity testing of equipment for a Mars surface mission. Developing analog surface operations on the Moon in a vacuum, high-radiation environment with reduced (1/6) gravity provides the best technology research and development environment for many technologies in TA06 and TA07, including those related to bioastronautics, ISRU, EVA, human mobility, habitat system design, sustainability and supportability, and radiation protection. Testing and operational experience gained from an extended mission on the surface of the Moon could significantly reduce risk for a Mars mission in which there is little to no opportunity for abort over the course of a 2-year mission. This incremental strategy is not without precedent. Before U.S. astronauts first landed on the Moon on July 20, 1969, many earlier flights were conducted to develop and test hardware and software, to collect physiological data, and to design environmental control and life support systems.
Asteroid Missions
Attempting to develop technology to support a mission to an as-yet-unidentified asteroid in ~2025 as NASA’s next major milestone in human exploration is a difficult challenge, especially because the schedule does not appear to support the development of required technologies. Several technologies must be developed and tested in the next 14 years for a human mission that may last 6 months or longer in a high-radiation environment at great distances from Earth. Subsystems would need to reach TRL 6 to support PDR by 2019 (6 years before flight).
An estimated 6-month NEA mission would significantly stretch the reliability of the currently available life support systems and radiation protection systems. By 2019, the candidate life support systems should have been tested on the ISS in a microgravity environment for at least 2 years to allow for both modifications and lifetime data. This implies deployment in about 2017. The radiation data required to design the protection systems will had to have been collected at orbits higher than LEO and then integrated into a test bed system prior to 2017. The TA06 and TA07 roadmaps do not clearly state when these data collection missions would occur or how the effects of the expected radiation environment on biological systems would be determined.
The NEA mission is not yet focused on a specific destination. Rather, it is focused on a hypothetical, notional asteroid which has not yet been discovered, in a hypothetical orbit co-incident with Earth’s orbit about the Sun. Thus, the location, composition, rotational rate, and other characteristics of the destination for an NEA mission are largely unknown. However, its gravitational level is almost certain to be so low that an NEA mission will not enable testing of systems in gravity level that is significantly different than the microgravity level found on the ISS.
A human mission to Phobos would be as challenging as a mission to Mars in many respects, particularly with regard to life support and radiation protection. Phobos may be covered with a thick layer of fine-grained regolith, and the gravity on Phobos is about 0.001 g. These conditions could preclude human surface operations, and it requires characterization of the surface dust of Phobos before it is possibly introduced into a spacecraft. The draft TA07 roadmap does not identify advanced human mobility for station keeping, but this may be required.
Pages 25 and 26 of the 2010 NASA HEFT report note that the following technologies are “technology development complete” for near-Earth objects (NEO): life support and habitation, exploration medical capability, space radiation protection, human health countermeasures, behavioral health and performance, space human factors and habitability, EVA technology, human exploration telerobotics, and human robotic systems. Assuming that a deep space NEA mission would last 6 months or more without abort capability or resupply, several technologies in the list above appear to conflict with the technology status reported in the draft TA06 and TA07 roadmaps. Additional consideration regarding forward and backward contamination also needs to be addressed.
PUBLIC WORKSHOP SUMMARY
The Human Systems Panel covered the Human Exploration Destination Systems technology area on April 27, 2011. The discussion was led by Panel Chair Bonnie Dunbar. Dunbar started the day by giving a recap of Day 1 of the workshop and providing additional direction for what topics the invited speakers should cover in their presentations. After this introduction by the panel chair, subsequent sessions focused on either the key areas of each roadmap or the speakers’ key areas of interest. For each of these sessions, experts from industry, academia, and/or government were invited to provide a brief presentation of their comments on the draft NASA roadmap. At the end of each session, there was a short open discussion by the workshop attendees focusing on the recent session. At the end of the day, there was a concluding discussion by the panel chair summarizing the key points observed during the day’s discussion.
Session 1: Roadmap Overview by NASA
A presentation by the NASA roadmap development team provided an overview of the destinations considered in developing the draft roadmap for TA07. The briefing included a chronologically sorted list of 13 top technical challenges, though the briefing did not describe a direct one-to-one mapping between the challenges and the level 3
technologies in this roadmap. The presentation also included a discussion of what facilities would be required to develop the various technologies, which prompted a question from the panel requesting a distinction between the facilities that do and do not currently exist. The roadmap team responded that the efforts of the Constellation Program to catalog existing facilities had been useful to investigate that question, but that this effort was on-going.
Session 2: In Situ Resource Utilization (ISRU)
The ISRU session started with a written statement from Bill Larson (NASA-KSC). The statement stressed the importance of pursuing ISRU technologies for human exploration beyond LEO and noted that the ISRU technology development program has historically taken a “back seat” to launch vehicle and spacecraft technology development. Additionally, Larson stressed the need to go to the Moon first to demonstrate and mature ISRU technologies, particularly oxygen production from lunar polar ice.
Leslie Gertsch (Missouri University of Science and Technology), represented by Diane Lenne (NASA Glenn Research Center), provided a review of technologies for detection, characterization, and acquisition of minerals, rocks, and soil materials. She stated that the environmental constraints of various destinations differ from conventional practices (on Earth) and that some technologies that work efficiency on Earth may fail in other gravity environments. Gertsch then provided her assessment of top technology choices in the areas of prospecting, acquisition, and beneficiation.
In the discussion session, the panel questioned how the differences in gravitational environments would impact ISRU technologies. One of the session speakers responded that the differences between microgravity, 1/6 g, 1/3 g, and 1 g create substantial differences in many chemical processes. When asked if technology demonstrations on the Moon would be beneficial to development of ISRU technologies suitable for use at other destinations, one of the speakers responded that although many of the processes will still differ, studying the chemical processes at 1/6 g on the Moon will at least add another data point between current information obtained in environments with microgravity (on the ISS and other platforms in LEO) and 1 g (on Earth).
Session 3: Sustainability and Supportability
Laura Duvall (NASA, Johnson Space Center) began the Sustainability and Supportability session by providing an overview of the ISS crew post-flight debrief process. She reported that human-related data collected during post-flight debriefs is stored in the Flight Crew Integration ISS Life Sciences Crew Comment Database, and the data are analyzed to generate summary reports covering topics ranging from habitable volume to exercise. These reports are then used for a number of applications such as crew training, hardware and software design, and requirements development.
Margaret Gibb (NASA, Johnson Space Center) provided a brief overview of the ISS inventory and stowage officer responsibilities, challenges, and lessons learned. The key takeaway relative to the draft roadmap for TA07 was that logistics management and cargo storage for a long-duration mission beyond LEO, where resupply is not possible, would be a significant challenge.
Kyle Brewer (NASA, Johnson Space Center) provided an overview of the ISS operations support officer responsibilities, challenges, and lessons learned. The key lessons learned were that in many cases miniaturization of system elements leads to increased complexity and difficulty in performing maintenance, commonality is the best strategy to prevent a large number of spares and tools, and a robust maintenance and diagnostic toolkit will be critical for exploration missions.
Session 4: Advanced Human Mobility Systems
Rob Ambrose (NASA, Johnson Space Center), represented by Brian Wilcox, started the Advanced Human Mobility Systems session with a briefing highlighting various examples of human mobility technologies, both historical and those currently in development. These included a zero-gravity jet pack, a pressurized vehicle for zero-gravity mobility, and a pressurized vehicle for surface mobility. Wilcox identified the top technical challenges
associated with human mobility to be mobility element sustainability, dust control, and human interaction with autonomous robotics.
David Wetergreen (Carnegie Mellon University) provided a commentary via telephone on the crosscutting nature of robotic mobility throughout the draft roadmaps and stressed that an emphasis was needed on robotic mobility in support of human exploration. He considered this to be a technology gap. He suggested that the top challenges were wheel design and terrain modeling, mechanisms design, and communication between humans and robotic mobility systems.
In the discussion session that followed these presentations, the panel asked about the latest status of suitports in architecture trades. One of the speakers responded that determining whether suitports or airlocks are better suited to a particular vehicle depends heavily on the environmental conditions of the vehicle.
Session 5: Advanced Habitat Systems
Marc Cohen (ex-NASA) started the Advanced Habitat Systems session with a briefing on the need for evidence-based performance requirements for advanced habitat systems. He also identified five showstoppers for deep space exploration by humans: the effects of reduced gravity, radiation, dust, the need for regenerative and bioregenerative life support, and planetary protection (to prevent both forward and backward contamination).
Larry Bell (University of Houston) provided a commentary on design aspects necessary for deep space habitats. He emphasized the need for commonality, simplicity, and autonomy, and noted that the level of acceptable risk is linked to mass requirements and, hence, system design. Regarding risk, Bell stated that NASA and the public would need to accept a higher level of crew risk to enable long-duration exploration missions. He also suggested that the top challenges to be overcome are simplifying complex systems, increasing commonality, adapting high-TRL technologies for exploration purposes, and improving space suit durability.
Session 6: Mission Operations and Safety
Paul Hill (NASA-JSC), Director of Mission Operations, started the Mission Operations and Safety session with a commentary on the current status of mission operations at Johnson Space Center. Relative to the draft roadmap for TA07, he noted that autonomy of mission operations is not driven by the concept of operations but rather by the autonomy built into the spacecraft and that the associated certification requirements drive the design and costs. Additionally, Hill suggested the top challenges to be overcome are the communications lag time on deep space missions, autonomous recovery software to address these lag times, and virtual reality and on-board simulation and training.
Nigel Packham (NASA Johnson Space Center) provided his assessment of the mission operations and safety section of the draft roadmap for TA07, indicating that it correctly identifies crew autonomy to be a vital aspect of the current plan-train-fly approach to crew training for missions beyond LEO. He also notes, however, that the draft roadmap fails to identify quantitative models that could account for the risks posed to crews beyond LEO.
Session 7: Crosscutting Systems: Dust Mitigation
Mark Hyatt (NASA-GRC) started the Dust Mitigation session with a brief overview of the Dust Management Project and a review of the dust issues encountered during Apollo missions. He identified the major operational challenges associated with dust as surface obscuration during descent, coating and contamination of surfaces, reduced crew efficiency, and human exposure to dust (and potential health effects). Lastly, Hyatt provided a description and TRL status for three promising dust mitigation technologies: electrodynamic dust shields, lotus coatings, and space plasma alleviation of regolith concentrations in lunar environments by discharge (also known as SPARCLED).
In the discussion session, the panel asked if there were significant differences between lunar and martian dust. Hyatt answered in the affirmative, although some dust mitigation technologies are likely to work at both destinations. The panel then directed a question to the TA07 Roadmap team asking if simulant production was included
in the roadmap. The TA07 team answered no, as they were specifically directed not to include simulants in the roadmap.
Session 8: Industry Panel
Brad Cothran (Boeing) started the industry session with an overview of ISS lessons learned as they pertain to long-duration spaceflight. Based on his experience with the ISS, he identified the top challenges for deep space missions to be logistics stowage, ECLSS reliability and maintainability, waste disposal, and real-time vehicle health management.
William Pratt (Lockheed, Plymouth Rock/Red Rocks) provided an overview of the Plymouth Rock and Red Rocks mission concepts to explore near-Earth asteroids and the martian moon Deimos, respectively. He then provided a summary of the enabling technologies for those missions which included microgravity exposure mitigation, radiation exposure mitigation, high reliability ECLSS, dust mitigation, and advanced EVA and mobility.
Laurence Price (Lockheed, Orion Project) provided a presentation summarizing the latest technology advances incorporated in the Orion crew module. Relative to the draft roadmap for TA07, Orion uses a closed loop life support system capable of supporting a 21 day mission with a crew of four. Additionally, Price informed the panel that the Orion crew module includes advanced thermal control, waste management, and fire detection and suppression technologies. When asked how Orion would handle EVAs, he responded that because Orion had no dedicated airlock, the entire cabin would depressurize and serve as the airlock.
Ken Bowersox (SpaceX) provided a brief commentary on the status of the development of the SpaceX Dragon crew module. According to Bowersox, the first crewed flight of the Dragon is expected within the next 3 years. Regarding technologies being used on Dragon, Bowersox reported that SpaceX was planning to use currently available ECLSS technologies.


























