
TA09 Entry, Descent, and Landing Systems
INTRODUCTION
The draft roadmap for technology area (TA) 09, Entry, Descent, and Landing Systems, consists of four level 2 subareas:1
• 9.1 Aeroassist and Entry
• 9.2 Descent
• 9.3 Landing
• 9.4 Vehicle Systems Technology
Entry, descent, and landing (EDL) systems is a critical technology that enables many of NASA’s landmark missions, including Earth reentry, manned Moon-landings, and robotic landings on Mars. EDL technologies support all of the systems and demonstration thereof necessary to perform any or all of the three mission phases defined by entry, descent, and landing. NASA’s draft roadmap for TA09 defines entry as the phase from arrival through hypersonic flight, with descent being defined as hypersonic flight to the terminal phase of landing, and landing being from terminal descent to the final touchdown. EDL technologies can support all three of these mission phases or just one or two of them. For example, aerocapture or aerobraking technologies support only the entry phase.
Entry, Descent, and Landing are the three main level 2 technology subareas; the fourth, Vehicle Systems Technology, encompasses technologies that cover multiple phases of EDL.
Before prioritizing the level 3 technologies included in TA09, several technologies were renamed, deleted, or moved. The changes are explained below and illustrated in Table L.1. The complete, revised technology area breakdown structure (TABS) for all 14 Tas is shown in Appendix B.
Technology 9.1.5, Instrumentation and Health Monitoring, is applicable to descent and landing as well as entry, and so it has been moved to technology subarea 9.4, Vehicle Systems Technology, which encompasses technologies that cover multiple phases of EDL, and has been redesignated 9.4.6.
Modeling and Simulation appears as separate line items in Entry (9.1.6), Descent (9.2.5), and Landing (9.3.6). However, there is so much overlap among these three areas, and the factors that determine priority vary so little from one to another, that they have been combined into a new level 3 technology (9.4.5 EDL Modeling and Simulation) in technology subarea 9.4, Vehicle Systems Technology.
![]()
1 The draft space technology roadmaps are available at http://www.nasa.gov/offices/oct/strategic_integration/technology_roadmap.html.
TABLE L.1 Technology Area Breakdown Structure for TA09, Entry, Descent, and Landing Systems
| NASA Draft Roadmap (Revision 10) | Steering Committee-Recommended Changes |
| TA09 Entry, Descent, and Landing Systems | Several items have been merged and/or relocated or deleted. |
|
9.1. Aeroassist and Atmospheric Entry |
|
|
9.1.1. Rigid Thermal Protection Systems |
|
|
9.1.2. Flexible Thermal Protection Systems |
|
|
9.1.3. Rigid Hypersonic Decelerators |
|
|
9.1.4. Deployable Hypersonic Decelerators |
|
|
9.1.5. Instrumentation and Health Monitoring |
Move: 9.1.5 into added 9.4.6, Instrumentation and Health Monitoring |
|
9.1.6. Entry Modeling and Simulation |
Merge 9.1.6 with 9.2.5 and 9.3.6 and move to added 9.4.5, EDL |
|
9.2. Descent |
Modeling and Simulation |
|
9.2.1. Attached Deployable Decelerators |
|
|
9.2.2. Trailing Deployable Decelerators |
|
|
9.2.3. Supersonic Retropropulsion |
|
|
9.2.4. GN&C Sensors |
Merge 9.2.4 with 9.3.4 and move to added 9.4.7, GN&C Sensors and |
|
9.2.5. Descent Modeling and Simulation |
Merge 9.2.5 with 9.1.6 and 9.3.6 and move to added 9.4.5, EDL Modeling and Simulation |
|
9.3. Landing |
|
|
9.3.1. Touchdown Systems |
|
|
9.3.2. Egress and Deployment Systems |
|
|
9.3.3. Propulsion Systems |
|
|
9.3.4. Large Body GN&C |
Merge 9.3.4 with 9.2.4 and move to added 9.4.7. |
|
9.3.5. Small Body Systems |
|
|
9.3.6. Landing Modeling and Simulation |
Merge 9.3.6 with 9.1.6 and 9.2.5 and move to added 9.4.5. |
|
9.4. Vehicle Systems Technology |
|
|
9.4.1. Architecture Analyses |
Delete: 9.4.1. Architecture Analyses |
|
9.4.2. Separation Systems |
|
|
9.4.3. System Integration and |
Note: In some places in the roadmap, |
|
9.4.3 Systems Integration and Analyses |
Analyses" is titled "Vehicle Technology." "Systems Integration and |
|
9.4.4. Atmosphere and Surface Characterization |
Analyses" more accurately describes the content of this technology. |
| Add: 9.4.5. EDL Modeling and Simulation | |
| Add: 9.4.6. Instrumentation and Health Monitoring | |
| Add: 9.4.7. GN&C Sensors and Systems | |
GN&C sensors (9.2.4) are applicable to entry and landing as well as descent. In addition, there are entry and descent aspects to large-body GN&C (9.3.4). Therefore, these items have been combined into a new level 3 technology (9.4.7, GN&C Sensors and Systems) in technology subarea 9.4, Vehicle Systems Technology.
Technology 9.4.1 Architecture Analyses appears in the TABS and in two summary figures in the TA09 roadmap, but it does not appear in the roadmap table of contents or in the text in the main body of the roadmap. It has been deleted.
Technology 9.4.3 in the TABS is titled Systems Integration and Analyses. In some places in the roadmap it is titled Vehicle Technology. Systems Integration and Analyses more accurately describes the content of this technology.
TOP TECHNICAL CHALLENGES
EDL is commonly a challenging aspect of NASA missions; EDL problems have been associated with some significant failures as well as many near misses.
NASA’s draft EDL roadmap may be too narrow because it is focused on the development of human class, large payload delivery to Mars as the primary emphasis, even though such a mission may be three decades away. While this mission beneficially stresses and challenges EDL technology development, it would be prudent to consider the benefit of advanced EDL technologies to other possible applications to ensure that the technology
under development is not tied too closely to a specific mission or destination. EDL technologies that enable the broadest spectrum of future missions by accommodating the widest range of variations in destination and timing would be of particular value. This is reflected in the broad set of six top technical challenges and the discussion of generic reference missions that follows. The top technical challenges defined by the panel are listed below in priority order. The first four challenges would make EDL systems more technically capable, the fifth challenge would make them safer and more reliable, and the sixth challenge would make them more affordable.
1. Mass to Surface: Develop the ability to deliver more payload to the destination.
NASA’s future missions will require ever greater mass delivery capability in order to place scientifically significant instrument packages on distant bodies of interest, to facilitate sample returns from bodies of interest, and to enable human exploration of Mars. For a given launch system and trajectory design, the maximum mass that can be delivered to an entry interface is fixed. Hence, increasing the mass delivered to the surface (or other destination, such as a planetary orbit or a mobile flight platform) will require reductions in spacecraft structural mass; more efficient, lighter thermal protection systems; more efficient, lighter propulsion systems; and/or lighter, more efficient deceleration systems. In a sense, increasing mass delivery to a planet surface is “the name of the game” for EDL technology because it may enable missions that are presently impossible (such as a human Mars landing) and/or provide enhancements such as more sophisticated science investigations and sample return capability for currently planned missions.
2. Surface Access: Increase the ability to land at a variety of planetary locales and at a variety of times.
Ideally, any exploration mission would have the ability to land at a variety of locales, including those at higher latitudes or elevations that may be difficult to access, at whatever time best satisfies other mission requirements and goals. Access to specific sites can be achieved by landing at one or more specific locations or by transiting (e.g., via a rover) from a single designated landing location to other locations of interest. However, it is not currently feasible to transit long distances and through extremely rugged terrain on Mars. In addition, improving the robustness of entry systems to better withstand a variety of environmental conditions (atmospheric winds, solar incident angle, etc.) could aid in reaching more varied landing sites. Alternatively, uncertainties in the entry environment could be better dealt with if the entry vehicle first went into orbit. Increased surface access could be achieved by tailoring the mission entry (i.e., the ability to control the inclination of entry and/or cross range capability during entry). Systems that have higher lift-to-drag ratios are an area for potential investigation in improving surface access on exploration destinations, such as Mars, that have a significant atmosphere.
3. Precision Landing: Increase the ability to land space vehicles more precisely.
A precision landing capability allows a vehicle to land closer to a specific, predetermined position in order to assure that the vehicle lands safely (without damage to itself or other personnel that may already be on the surface), or in order to meet other operational or science objectives. The level of precision (e.g., 1000 m, 100 m, etc.) that is achievable at touchdown is a function of the design of the guidance, navigation, and control (GN&C) system, the control authority of the vehicle, and the entry environment. Precision landings require accurate GN&C performance throughout the entire descent and landing phases. This requires accurate control of vehicle position, velocity, attitude, and other vehicle states (Paschall et al., 2008).
4. Surface Hazard Detection and Avoidance: Increase the robustness of landing systems to surface hazards.
The surface hazards associated with exploration destinations remain uncertain to some degree until the site has been visited. Relying on passive systems alone to characterize a landing site can be problematic, as was evident during the Apollo Program, where each of the six landing missions faced potentially mission-ending hazards at the
landing sites. Hazardous rocks, craters, and slopes were perilously close to each of the successfully landed missions and brought to light the incredible challenge each mission faced (Brady and Paschall, 2010). Active hazard detection methods can quickly optimize safe sites and reduce fuel costs while directly characterizing a landing surface in real time, but technology development is needed to improve key capabilities in this area (Brady et al., 2009).
5. Safety and Mission Assurance: Increase the safety, robustness, and reliability of EDL.
Loss-of-mission events during EDL for NASA and the international community have been unacceptably high for Earth-entry and especially planetary entry missions. For example, the failure rate for U.S. missions to Mars over the past 20 years is 27 percent (i.e., 3 of 11). U.S. lander missions to Mars have a failure rate of 20 percent (i.e., 1 of 5) (NASA, 2011). High-profile U.S. failures include the Mars Polar Lander and the Mars Climate Orbiter. Other nations have also experienced failure during EDL (e.g., Beagle 2 and numerous Soviet missions), especially in the earlier years of planetary exploration. These events are costly setbacks for high-profile robotic missions, which are the result of many years of effort in design, development, flight, and operations resources. For crewed missions, EDL failures can result in tragedy, such as the Columbia accident.
Safety and mission assurance are necessary constraints for mission and vehicle design. Some level of risk is unavoidable with planetary exploration missions. This challenge seeks to improve safety and mission assurance while achieving important mission objectives in an affordable manner.
6. Affordability: Improve the affordability of EDL systems.
EDL missions with large payloads are expensive. Improving EDL system affordability would allow more missions to be flown within fixed and predictable budgets, and it would enable new missions previously deemed unaffordable. In fact, the issue of affordability led the Planetary Decadal Survey to question whether a Mars sample return mission belongs in its roadmap of future planetary missions (NRC, 2011). The affordability of EDL systems can be improved either by (1) improving EDL capabilities so that it is less expensive to get a payload of some particular mass to the surface or (2) improving payload technologies so that the same mission objectives can be achieved with a smaller payload mass delivered to the surface. Technology development in TA09 is focused on the first approach; the second approach will occur naturally as a result of advances in other Tas.
QFD MATRIX AND NUMERICAL RESULTS FOR TA09
Figure L.1 shows the QFD scores for each technology in TA09. Figure L.2 shows the relative ranking of each technology, grouped into high, medium, and low priorities. The process by which the QFD scores were generated is described in Chapter 2. The panel assessed eight of the technologies as high priority. Four of these were selected based on their QFD scores, which significantly exceeded the scores of lower-ranked technologies. After careful consideration, the panel also designated four additional technologies as high-priority technologies.2
The four technologies selected based on their QFD scores were: 9.4.7 GN&C Sensors and Systems, 9.1.1 Rigid Thermal Protection Systems, 9.1.2 Flexible Thermal Protection Systems, and 9.1.4 Deployable Hypersonic Decelerators. These technologies received that ranking based on their significant overall benefit, their ability to meet NASA needs (generally driven by supporting a wide range of missions), and their risk and reasonableness. 9.4.7 GN&C Sensors and Systems was also noted to meet non-NASA aerospace needs. The four additional technologies did not score as high on the QFD scale, but investments in these technologies will support a wide range of expected future EDL missions.
![]()
2In recognition that the QFD process could not accurately quantify all of the attributes of a given technology, after the QFD scores were compiled, the panels in some cases designated some technologies as high priority even if their scores were not comparable to the scores of other high-priority technologies. The justification for the high-priority designation of all the high-priority technologies for TA09 appears in the section “High-Priority Level 3 Technologies.
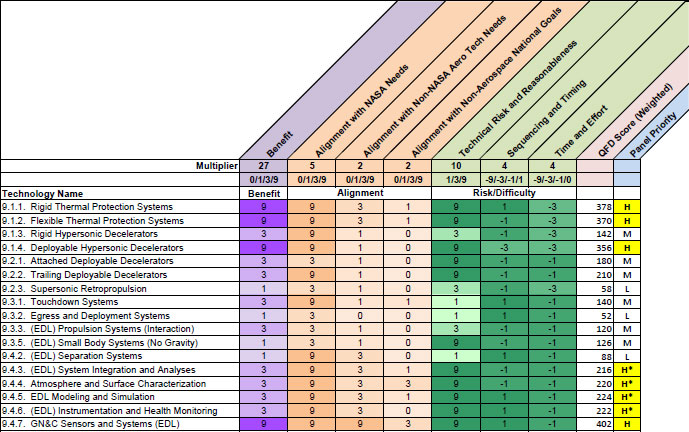
FIGURE L.1 Quality function deployment (QFD) summary matrix for TA09 Entry, Descent, and Landing Systems. The justification for the high-priority designation of all the high-priority technologies appears in the section “High-Priority Level 3 Technologies.” H = High Priority; H* = High Priority, QFD score override; M = Medium Priority; L = Low Priority.
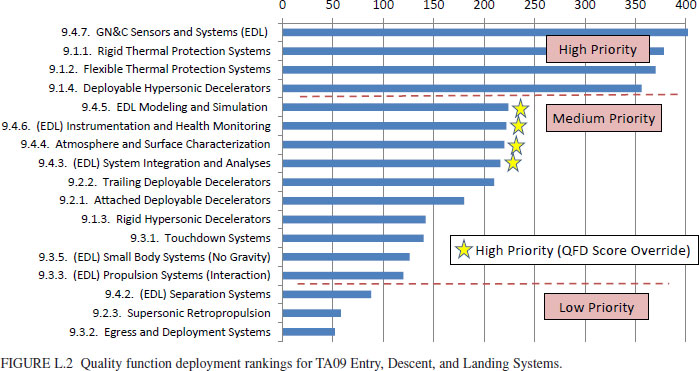
FIGURE L.2 Quality function deployment rankings for TA09 Entry, Descent, and Landing Systems.
CHALLENGES VERSUS TECHNOLOGIES
Figure L.3 shows the relationship between the level 3 technologies in TA09 and the top technical challenges. The high-priority technologies have a strong relationship to many of the technical challenges. The top-rated level 3 technology, 9.4.7 GN&C Sensors and Systems, would likely have a major impact on four of the six technical challenges and a moderate impact on the remaining two technical challenges. The next two highest ranked technologies (9.1.1 Rigid Thermal Protection Systems and 9.1.2 Flexible Thermal Protection Systems) would likely have an impact on five of the six technical challenges. For both of these technologies, improvements in reusable TPS could specifically help meet the affordability challenge, especially for human return from low Earth orbit. The fourth ranked technology, 9.1.4 Deployable Hypersonic Decelerators, contributes to four of the six technical challenges. The four additional high-priority technologies also play an important role in meeting the technical challenges. In fact, three of them could contribute toward meeting all six technical challenges. These technologies can in particular help to improve knowledge of the EDL system, thereby reducing required margins.
GENERIC REFERENCE MISSIONS FOR TA09
Development of EDL technologies with a broad focus will help prevent potentially important missions from being eliminated for consideration because they are perceived as unachievable due to their EDL requirements. Additionally, technology that can enable only a few missions may have less payoff than a building block approach to technology development that supports a series of progressively more challenging missions. Furthermore, because of resource constraints, EDL technology investments must be time-phased. EDL technologies that enable the broadest spectrum of future missions by accommodating the widest range of variations in destination and timing will tend to be the most highly valued. This is reflected in the broad set of technology challenges above and in the discussion of generic reference missions (GRMs) below and in Figure L.4, which is provided as a replacement to Table 1 in NASA’s draft roadmap; Figure L.4 is more comprehensive.
The GRMs in Figure L.4 capture the broad spectrum of EDL missions that have flown or could be flown in the foreseeable future. For example, there is not a human mission to Pluto GRM because this type of mission is too far out on the horizon to be reasonably achieved. The 35 GRMs in Figure L.4 are distinguished from each other in terms of destination, local environmental discriminators (presence of atmosphere, gravity, and extreme environments), and mission-defined discriminators (entry or landing, hard or soft landing, and class of lander, such as human, cargo, or robotic).
Given the GRM definitions in Figure L.4, Figure L.5 shows the linkage between the GRMs and the EDL technologies evaluated by the panel. Figure L.5 confirms that the high-priority technologies (and many of the medium-priority technologies) are applicable to a wide range of GRMs.
HIGH-PRIORITY LEVEL 3 TECHNOLOGIES
Panel 6 identified eight high-priority technologies in TA09. The justification for ranking each of these technologies as a high priority is discussed below.
EDL technologies in general do not benefit from access to the International Space Station (ISS). However, advanced EDL technology could lead to new vehicles with improved capabilities for returning crew or payloads from the ISS, and return flights from the ISS could provide flight testing opportunities for EDL technologies.
Technology 9.4.7, Guidance, Navigation, and Control (GN&C) Sensors and Systems
A primary objective of many EDL missions is to safely land a vehicle in new destinations such that human or robotic exploration can be achieved. The ability to accurately hit entry corridors, to control the vehicle during entry and descent, to navigate the vehicle during all phases of EDL, and to safely and precisely land a vehicle in hazardous terrain are examples of a high-performing EDL GN&C system.
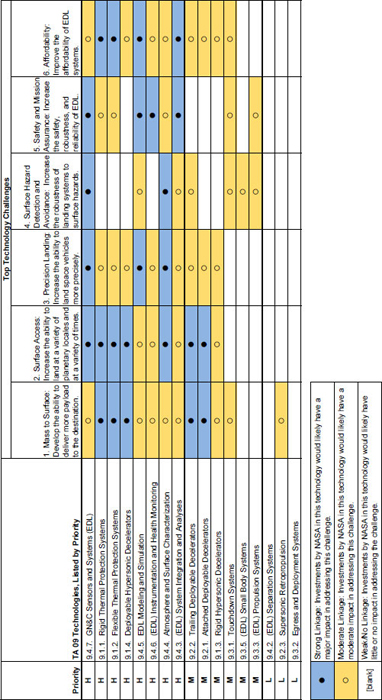
FIGURE L.3 Level of support that the technologies provide to the top technical challenges for TA09 Entry, Descent, and Landing Systems.
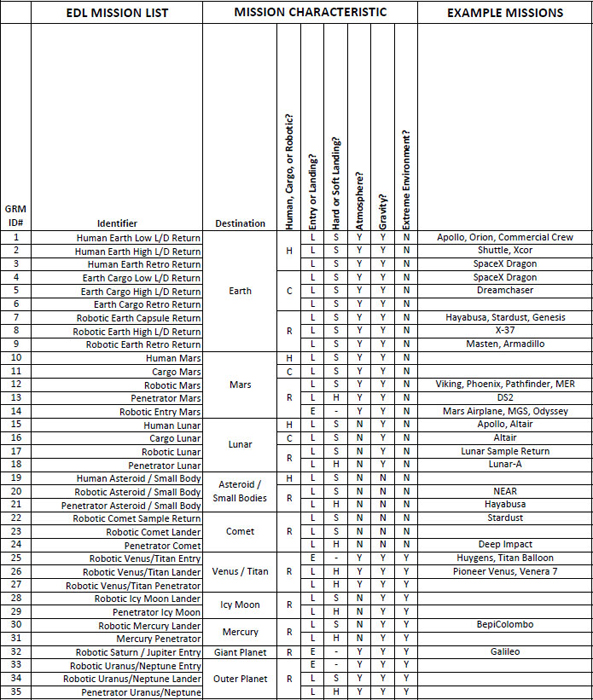
FIGURE L.4 Generic reference missions for TA09 Entry, Descent, and Landing Systems.
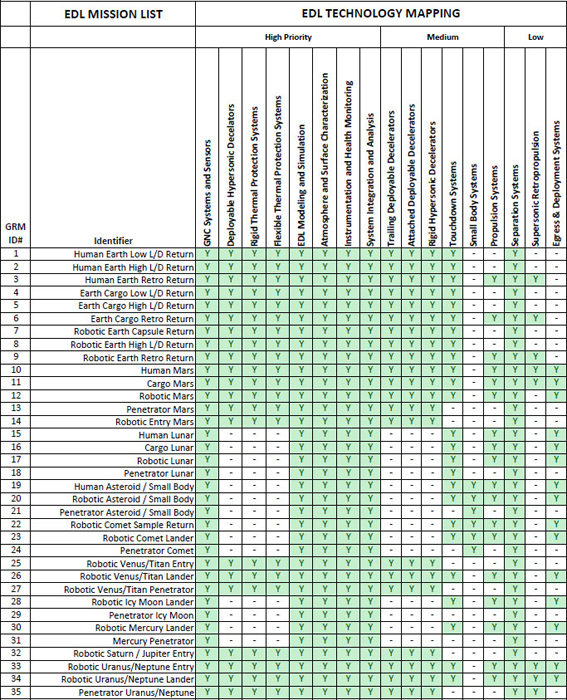
FIGURE L.5 Mapping of generic reference missions to level 3 technologies for TA09 Entry, Descent, and Landing Systems.
Fundamentally, an EDL mission is supported by a design architecture to achieve its goals. The ability of the GN&C system to achieve its mission objectives is a function of GN&C sensor performance, vehicle actuator ability, and the designer’s ability to craft them sensibly together onboard a capable, real time, computing platform.
The technology readiness level (TRL) widely varied among GN&C sensors and systems. Tried and true GN&C sensors such as inertial measurement units (IMUs) and star cameras typically are at a high TRL, but they could benefit from reduced size, weight, and power, while also increasing performance and noise immunity. EDL capable velocimeters and altimeters generally have a lower to mid-level TRL and would benefit from increased accuracies, range, and update rates while also decreasing size, weight, and power. Finally, GN&C sensor and system advancement in the following currently low-TRL items would significantly improve or even enable future EDL missions.
• Terrain relative navigation systems, sensors, and algorithms
• Precision landing systems, sensors, and algorithm design
• Hazard relative navigation systems, sensors, and algorithm design
• Hazard detection sensors and systems
• Adaptive control systems
• Autonomous GN&C sequencing and mission managers
• Inertial swarm sensing methods and instrumentation
• Enhanced fault tolerance
As shown in Figure L.5, GN&C Sensors and Systems are common to all of the foreseen EDL generic reference missions. They align extremely well with NASA’s expertise, capabilities, and facilities. Given their broad applicability, other non-NASA agencies (European Space Agency, Japanese Aerospace Exploration Agency) and military organizations (National Reconnaissance Office, Missile Defense Agency, U.S. Navy, U.S. Air Force, etc.) will and have improved the state of the art of some GN&C sensors, but additional work is needed to improve operational systems. NASA could lead by example and invest in an aggressive, planned, and sustained NASA technology development effort to advance GN&C sensors and systems given such broad applicability to a multitude of their missions. It will take a sustained and coordinated effort, possibly shared among organizations, to raise the TRL of necessary GN&C sensors and systems, particularly across the “valley of death” levels of TRL 5-6 where validation in the relevant environment is required.
This technology is game-changing because it significantly enhances the ability to increase mass to the surface, the ability to land anywhere, and the ability to land at any time. This technology was evaluated as a high-priority technology since significant technology advancement is likely to provide transformational capabilities that would enable important new missions that are not currently feasible during the next 20 years, and because it is broadly applicable across the entire aerospace community and in multiple NASA mission areas. Furthermore, the technical risk associated with development of this technology is moderate to high, which is a good fit to NASA’s level of risk tolerance for technology development, and the likely cost to NASA and the timeframe to complete technology development is not expected to substantially exceed that of past efforts to develop comparable technologies.
Technology 9.1.1, Rigid Thermal Protection Systems
Thermal protection systems (TPS) are used to protect the payload of the entry vehicle (both human and robotic) from the high-temperature and high-shear flow environment experienced during the hypersonic entry phase. Rigid TPS materials are typically separated into two major classes, reusable and non-reusable, and some missions will use a combination of the two. An example of reusable rigid TPS is the thermal protection tiles used on the space shuttle. Though reusable, these materials do have a finite lifetime due to the thermal and mechanical environments experienced during re-entry. For high-energy entries, like an Earth return beyond low Earth orbit (LEO) or entry into the atmosphere of another planet or moon, non-reusable or ablative thermal protections systems have been historically used since the currently available reusable systems cannot handle such high heat loads. Several materials (e.g., AVCOAT, PICA, and SLA-561V) have been flight qualified and are at TRL 7 to 9. However, the process for making AVCOAT had to be redeveloped for the Orion vehicle and its TRL is likely less (i.e., 5 to 7). Materials
such as carbon phenolic, which are also widely used for military applications, are also in the TRL 7 to 9 range. However, carbon phenolic in particular presents availability issues because of a lack of U.S. suppliers of rayon.
Most NASA flight experience has been with rigid thermal protection systems, where the TPS is installed onto a rigid aeroshell structure. These systems can handle both high velocities and high heat fluxes. Rigid TPS, however, can account for a large percentage of the entry vehicle mass. Vehicle designs use conservative estimates of heating to account for uncertainties, which contributes to the large mass of a TPS system. Recent research has been focused on the development of lower density ablators. For higher speed entries into the outer planets or their moons that have atmospheres, new materials will need to be developed that can also handle extreme environments that include both high convective and radiative components.
While it is clear that flight quality heritage materials exist (or need to be re-constituted) for return-from-LEO applications, next-generation EDL systems for return from LEO would benefit from additional research and development to improve reliability and maintainability and to reduce cost. However, the draft roadmap’s description of rigid TPS focuses on ablative, single-use TPS with application to planetary entry. As noted during the TA09 EDL workshop, the value of this technology would be enhanced if its scope were increased to include return-from-LEO applications (Grantz, 2011; Picetti, 2011). For new ablative and reusable materials, the TRL is between 1 and 3.
Commercial applications are primarily focused on lower-energy LEO return, while rigid TPS for high-energy entries primarily have application to NASA or military missions. Therefore, there should be opportunities for NASA to partner with other organizations in the development of this technology. Also, since many other nations are entering the civilian space arena, there are also opportunities to partner with them. An example is the ESA EXPERT (European Experimental Reentry Testbed) mission (Thoemel et al., 2009; Muylaert, 2011). Additionally, there could be spin-off opportunities for other high-temperature applications requiring thermal protection (i.e., rocket motor nozzles or nuclear reactors). Because the thermal protection technology is unique to these applications and requires both small-scale ground testing and large-scale flight testing, it is unlikely that industry would take the lead in either developing or qualifying new materials or systems. Therefore, NASA (and perhaps the Department of Defense) is likely the best option for maintaining facilities such as arc-jets and investing in state-of-the-art computational tools (and the human capital to develop and apply these tools).
This technology is game-changing because advances in this area would enable new missions in extreme thermal environment or reduced mass to increase vehicle payload and performance, far beyond what has been previously achieved. Because of the applicability of this technology to the military, it can also have high impact on non-NASA aerospace needs. Moderate to high levels of risk are involved to further this technology.
Technology 9.1.2, Flexible Thermal Protection Systems
Like rigid TPS, flexible TPS can be reusable or ablative (or some combination thereof). Because of their flexible nature, these TPS systems could be packaged into tighter volumes, applied to irregular surfaces, and deployed when necessary. In addition to thermal protection, these systems can also be expected to carry significant aerodynamics loads (primarily for deceleration). Because of their flexibility, it might be possible to tailor the shape of the TPS to improve both the aerodynamic performance during the hypersonic entry phase (to provide lifting and cross range capability). It may also be possible to use these flexible materials to control local boundary layer state (i.e., laminar versus turbulent) and heating loads. While flexible TPS has been used on the leeside of the space shuttle (i.e., advanced flexible reusable surface insulation blankets), they have not been demonstrated for high-energy entries or where significant aero-thermal-structural interactions might occur. The TRL for advanced flexible TPS materials is 1 to 2.
Like their rigid counterparts, flexible TPS will have use in the commercial, civilian, and military space market. The ability to morph the shape of the TPS could have application in long-range strike applications where precise aerodynamic control is essential. Similar to the rigid TPS, it is expected that NASA will be the prime agency involved in maturing this technology with industry eventually being able to commercialize the capabilities developed. Advanced flexible TPS will require significant research as the primary TPS for atmospheric entry. Significant challenges exist with most any deployable decelerator concept, including the associated thermal protection in terms of handling, manufacturing, packing, and deployment following interplanetary transit or LEO storage. Like
rigid TPS, furthering flexible TPS technology will require significant advances in computational capabilities (for example, to model fluid-structure interactions in high heating environments). Additionally, being able to do both quantitative and reliable ground and flight testing of these systems will post significant challenges.
This technology is game-changing because advances in flexible TPS may be able to reduce TPS size and weight below that which can be achieved with rigid TPS. The military aerospace community could also benefit from this technology. Due to the lack of experience in this regime, the risk is moderate-high, but likely higher than that of the rigid TPS, particularly in the category of reusable flexible TPS in high heat flux/high dynamic pressure regions, a subject that was not addressed in the discussion of this technology in the draft NASA roadmap for TA09. Further developments in both materials and manufacturing of these systems are required before flexible TPS can be considered as a candidate technology for future use. This will increase the time necessary to prove the technology over its rigid counterparts.
Technology 9.1.4, Deployable Hypersonic Decelerators
Current entry systems employ traditional rigid decelerator architectures to provide thermal protection and deceleration. The shape and size of rigid devices define their aerodynamic performance. Launch vehicle dimensions define the maximum size and hence the maximum drag area in traditional decelerators. Deployable decelerators, which could use flexible or rigid components, would provide the ability to utilize much larger drag areas and novel vehicle shapes relative to traditional rigid decelerators, because they are not limited to the size of the spacecraft.
Deployable decelerators could enhance the drag area of the spacecraft during the early phase of EDL, thereby reducing the altitude required and increasing the time available to establish the landing configuration. These technologies could be used for the safe landing of larger objects from suborbital terrestrial trajectories, as well as enabling heavier payloads to successfully arrive at Mars, where low-density atmospheres are particularly challenging. Deployable decelerators can also be deployed in space vacuum to enhance aerocapture development which has significant mass fraction benefits for science missions.
Rigid decelerators can be deployed with servos, thrusters, stored gas, and/or other mechanical devices that are relatively simple in design, construction, and implementation, but which come with a relatively high price in terms of mass budget. Mechanical deployment systems that do not rely on inflatables do however require the integration of flexible TPS and the associated complexities.
Inflatable decelerators are very appealing in terms of mass fractions but require some form of internal pressurization to inflate them. Inflation systems may use stored gas, pyrotechnic gas generators, or a hybrid approach. Ballutes use ram-air (atmospheric) inflation gas to establish their shape. As a result, they do not require auxiliary gassing systems or their associated mass, but neither can they be deployed in the vacuum of space. This feature complicates the use of ballutes as aerocapture or aerobraking devices.
Many of the technologies employed as inflation systems have relatively high TRLs, but the TRL of inflations systems in combination with a decelerator structure is much lower. Overall, deployable hypersonic decelerator technology is in the range of TRL 2 to 4.
This technology is game-changing because it provides the ability to utilize much larger drag areas and novel vehicle shapes relative to traditional rigid decelerators. These features can enhance thermal protection and deceleration during entry and thus provide one approach for enabling new missions (e.g., landing large masses on Mars). The technology is well aligned with NASA’s needs and can be employed over a broad range of exploration missions. Commercial launch service providers may also take advantage of these capabilities. Significant cost reductions can be realized by enabling booster and cargo delivery vehicle recovery for re-use. However, it is unlikely that commercial providers will make the required investment to advance this technology past TRL 6 and therefore NASA should lead development. It is certainly a difficult undertaking, but well within the grasp of the agency.
Technology 9.4.5, EDL Modeling and Simulation
EDL Modeling and Simulation (M&S) technology would provide the ability to conduct computational predictions for robust and efficient design in all phases of EDL missions. This technology includes computational fluid
dynamics analysis, finite element modeling, fluid-structural interaction analysis, aerothermodynamics modeling (including ablative surface and thermal radiation physics, coupled stability, and trajectory analysis), multi-disciplinary analysis tools, and other high-fidelity analysis required for EDL missions.
Because of the limited range of test conditions available in experimental tests, and because of the high cost of such testing, M&S tools are highly valued in every phase of design and analysis of EDL systems. In addition to development of physical models, numerical methodologies, and software tools to conduct M&S, this technology also includes development and application of experimental validation including flight tests. Only if high-fidelity models are also well-validated can they be useful in reducing margins, thereby increasing mission capability without a loss in safety. Legacy flight data is often not sufficient to validate the codes, particularly because uncertainties in the measurements were often not well understood and the boundary conditions required for M&S were not well characterized. The entire process is further complicated by the wide range of operational conditions experienced by EDL systems.
NASA conducts primarily mission-related modeling and simulation work in the Aeronautics Research Mission Directorate and in ESMD. This technology would build on the well-known foundational research carried out by NASA’s Aeronautics Research Mission Directorate to advance the state of the art in critical areas for missions planned over the next 20 years.
Current M&S technology is at TRL 4 to 7; in that it can already conduct accurate, steady aerodynamic analysis of rigid configurations. EDL missions, however, require accurate analysis in areas for which current predictive capability is insufficient, and is generally at TRL 3. For example, because the ability to reliably predict TPS recession rate at every location in a radiative environment does not exist, heat shields tend to be over-designed, thereby increasing weight and reducing mission capability.
This technology is well aligned with NASA’s expertise, capabilities, and facilities. NASA has taken a lead role in the development of thermo-chemical nonequilibrium modeling for aerospace applications but would benefit by working closely with Department of Defense and Department of Energy laboratories and industry partners who conduct research in this technology for weapon systems in continuum and rarefied high-temperature flow environments. NASA has significant in-house expertise in physical modeling and software development to conduct and help guide research conducted by academic, federal, and industry partners in this technology. NASA’s investment in high-performance-computing facilities also makes it well suited to conduct this work, and it currently possesses unique ground and flight test capabilities to conduct experimental validation required for EDL Modeling and Simulation. Continued investments in ground test facilities, such as large scale wind tunnels, arc-jet facilities, and supersonic and hypersonic wind tunnels, will ensure that the means to validate codes are available when required. NASA is uniquely motivated to pursue this technology and major investments from industry are not expected in the absence of NASA involvement.
The panel overrode the QFD score for this technology to designate it as a high-priority technology because the QFD scores did not fully capture the value of this technology in terms of how widely applicable it is to EDL missions and to the successful development and implementation of other high-priority technologies in TA09, particularly the TPS and decelerator technologies. Furthermore, EDL modeling and simulation supports all six of the top technology challenges. It also is characterized by the appropriate level of risk and difficulty in physical modeling, numerical technique development and experimental validation, yet it builds upon a long-standing core competency which NASA possesses in these subjects. The development plan is clear and there is a likelihood of joint funding by federal agencies and the industrial space industry.
Technology 9.4.6, Instrumentation and Health Monitoring
NASA draft roadmap for TA09 notes that, “Entry instrumentation for both engineering data and vehicle health monitoring provides a critical link between predicted and observed performance of entry vehicle systems.” This is particularly true for entry thermal protection systems because complete simulation of the entry environment is impossible in ground-based test facilities. Hence, while ground-based test facilities are indispensable in developing thermal protection systems, the complete, rigorous validation of TPS design algorithms can only be achieved through comparison of predictions with flight data. Also, health monitoring instrumentation can provide system
performance data as well as evidence that vehicle systems are operating properly prior to entry. The value of investments in this technology would be greatly enhanced if NASA heeded the call in the draft roadmap to “develop a NASA policy for required EDL instrumentation and data acquisition in order to advance and build confidence in models that are essential to EDL system qualification.”
As pointed out in the draft roadmap, major technical challenges in entry instrumentation include high-temperature systems capable of direct heat flux measurements in situ, measurements (temperature and strain) in flexible TPS, advanced optical and other non-intrusive measurement techniques, and shock layer radiation measurements in ablative TPS. Challenges in health monitoring include development of low-data, low-power networks, elimination of false positives, and the ability to initiate and monitor repair of detected damage.
The TRL of this technology could be said to be 9 since such instrumentation has been successfully flown on previous missions (e.g., Apollo, space shuttle). However, current instrumentation systems are heavy and, in some cases, unacceptably intrusive. What are needed are new lighter, smaller, less intrusive, and more accurate approaches. Such systems are currently at TRL 2 or 3.
The panel overrode the QFD score for this technology to designate it as a high-priority technology. The QFD scores did not fully capture the value of this technology in terms of how widely applicable it is to all EDL missions, as well as the contribution it would make to improving the safety and reliability of EDL missions. This technology is well aligned with NASA’s expertise and capabilities and requires NASA involvement for its successful development. The data obtained and the resulting improved heat shield design algorithms will be of great interest to NASA, DOD, DOE, university researchers, and the commercial space transportation community.
The scope of this technology overlaps the scope of some of the technologies in the autonomy subarea in TA04 Robotics, TeleRobotics, and Autonomous Systems.
Technology 9.4.4, Atmosphere and Surface Characterization
The goal of this technology is to provide a description of the atmosphere and surface of a planet in sufficient detail to facilitate the planning and execution of planetary missions. In the case of planetary atmospheres, a predictive model is required that will define the spatial and temporal atmospheric characteristics on global, zonal, and local scales, including annual, seasonal, and daily variations. Such models exist for the Moon, Mars, and Venus, but they do not provide the needed level of detail. The current state of the art is represented by the Mars Global Reference Atmospheric Model (Justus et al., 2005; Justh et al., 2011). This model allows predictions of the needed atmospheric profiles and dynamics but its accuracy is limited by an inadequate data base. For other planets, the models that exist provide only gross descriptions with very little detail. Surface models are extremely important for rover missions and are critical for missions involving human landings where the grain size and abrasive character of the regolith can cause serious damage to bearings, drive motors, and space suits. Atmosphere models are of critical importance for entry missions that involve aeromaneuvering for increased landing accuracy and aerocapture to increase landed mass. The inaccuracies of the present atmospheric models result in conservative designs and large mass margins that degrade performance and have contributed to the lack of acceptance of these techniques by project managers.
Future investments in this technology could include distributed weather measurements (short and long duration) on Mars; the development of a standard, low-impact measurement package for all Mars landed missions to provide future Mars landers with surface pressure and upward-looking wind measurements; the development of orbiter instruments for wind and atmospheric property characterization at altitudes relevant to aerobraking, aerocapture, and aeromaneuvering; and the development of higher fidelity atmospheric models based on these data. Another major contribution would be the development of automated data fusion for visible stereo imagery, multispectral imagery, and altimetry and its conversion to onboard topography and albedo surface maps suitable for use by a terrain tracker. Other high-priority work areas include the development of “scout” probes that would measure atmospheric properties ahead of an entry vehicle and the development of vehicle-based sensors for making real-time measurements of local and far-field atmospheric properties.
The TRLs of the current models range from 6 (for the surface characterization of the Moon and the atmosphere of Mars) to 2 or 3 for the more distant planets. The associated programs, described above, are currently at relatively
low TRLs from 2 to 4. The panel overrode the QFD score for this technology to designate it as a high-priority technology because the QFD scores did not capture the value of this technology in terms of its importance in achieving all of the EDL top technical challenges, and having a strong linkage to three of the top six challenges.
There is a critical need for this technology in designing and carrying out most future planetary missions. This technology is well aligned with NASA’s expertise and capabilities and requires NASA involvement for its successful development. These models will be of interest to the scientific community and basic science investigations can provide important inputs in their development. Both basic science investigations and the development of predictive engineering models should be carried out in parallel to maximize the benefits.
Technology 9.4.3, System Integration and Analyses
EDL systems are a highly coupled and interdependent set of capabilities consisting of software and hardware components as well as multiple disciplines. The nature of this problem lends itself to technologies that develop improved methods of performing systems integration and analysis such as multidisciplinary design optimization. Optimizing an EDL system involves various disciplines (e.g., thermal, fluid dynamics, and trajectories), multiple flight phases (entry, descent, and landing), overall system reliability and cost, and a host of tools that address all of the above. This technology is closely coupled with 9.4.5. Modeling and Simulation.
System performance is enhanced, life cycle costs are reduced, and development times are shortened when the interplay between system requirements, system concepts, and the potential benefit of new technologies is explored as early as possible in the development of new systems, especially when overly restrictive or arbitrary requirements are filtered out (Mavris and DeLaurentis, 2000).
Existing systems integration and analyses technologies have not been widely applied to EDL mission design, certainly not to the degree that will likely be necessary to design an EDL system for a human mission to Mars. The whole EDL technology portfolio would benefit from the expanded use of these technologies across a larger mission set since they can help to understand the benefits that other technologies can bring to a given mission or a whole set of missions once the systems integration and analysis techniques are validated. Like 9.4.5. Modeling and Simulation, systems integration and analysis would benefit immensely from flight engineering data to validate and improve systems integration and analysis tools. However, as the fidelity of systems integration and analysis techniques improves, the need for further (expensive) testing can be reduced.
This understanding of and the need for this technology largely resides within NASA and, to some extent, in DOD, but its nature lends itself to projects that universities could perform.
While systems integration and analyses is not expected to be game-changing technology, the panel overrode the QFD score for this technology to designate it as a high-priority technology because it supports the complete mission set and all six of the EDL top technology challenges.
MEDIUM- AND LOW-PRIORITY TECHNOLOGIES
One group of medium- and low-priority technologies in TA09 had a lower overall benefit than the high-priority technologies as well as development challenges. Technologies 9.2.2 Trailing Deployable Decelerators, 9.2.1 Attached Deployable Decelerators, 9.1.3 Rigid Hypersonic Decelerators, and 9.2.3 Supersonic Retropropulsion all fell into this category. Trailing and Attached Deployable Decelerators were the highest ranked of the medium- and low-priority technologies. Both of these technologies were judged to have limited benefit, however, particularly because they apply to the descent phase and were not deemed to be game-changing. Rigid Hypersonic Decelerators were the next highest ranked technology. While additional improvements can be made in this technology, benefits are generally limited by the maximum payload size of current launch vehicles. Supersonic Retropropulsion was also judged to have limited benefit, and it was technically the most challenging. While often described as a game-changing technology, the panel deemed that its applicability was limited mainly to landing large payloads on the surface of Mars, but in that application disadvantages associated with transporting extra propellant on a mission to Mars would likely outweigh any other possible mission improvements.
Another group of medium- and low-priority technologies are less technically critical and typically include engineering developments that normally are addressed in the development of individual missions. Technologies 9.3.1 Touchdown Systems, 9.3.3 Propulsion Systems, 9.4.2 Separation Systems and 9.3.2 Egress and Deployment Systems all fall into this group.
Technology 9.3.5 Small Body Systems was judged to have a low benefit because of its very limited mission applicability. This technology may actually fit better in the roadmap for TA04, Robotics, TeleRobotics, and Autonomous Systems, because it is essentially a rendezvous and docking problem.
DEVELOPMENT AND SCHEDULE CHANGES FOR THE
TECHNOLOGIES COVERED BY EACH ROADMAP
The ebb and flow of EDL missions make it difficult for the EDL community to maintain core capabilities and knowledge. EDL technology development requires continuous effort and sustained funding over a number of years in order to be successful and to generate industry participation (Peterson, 2011; Grantz, 2011; Rohrschnedier, 2011).
After the Apollo program, Viking and other planetary probes capitalized on the ablative heat shield technologies developed during Apollo. However, in more recent years, the focus has been more on the reusable TPS used on the space shuttle for return from low Earth orbit, and momentum was lost in the ablative material development and supply chain. Today, given the end of the Space Shuttle Program (for human spaceflight) and the long gap between development of the Mars Science Laboratory and the Mars 2018 mission (for robotic exploration), the process of advancing reusable TPS could itself lose momentum in the coming years. For example, key materials suppliers are terminating production and high-temperature coating developments for ceramic tiles are under-funded (Grantz, 2011).
Ideally, EDL research and technology development by NASA would build on past work to meet future requirements. Since EDL is not a high demand opportunity for industry, it is important that NASA maintain these capabilities. A successful technology program would preserve test capabilities and advance key technologies at a steady pace that does not depend solely on flight mission approvals. By ensuring knowledge capture, NASA will not have to relearn lessons from the past. Struggles with Avcoat are a good example of loss of knowledge, experience, and lessons learned.
PUBLIC WORKSHOP SUMMARY
The workshop held by the Entry, Descent, and Landing Panel for the NASA Technology Roadmaps study took place on March 23-24, 2011, at the Beckman Center in Irvine, California. The discussion was led by panel chair Todd Mosher. Mosher started the day by giving a general overview of the roadmaps and the NRC’s task to evaluate them. He also provided some direction for what topics the invited speakers should cover in their presentations. This introduction was followed by an overview of the NASA draft EDL technology roadmap, presented by the roadmap authors. Each panel session began with a brief introduction by the panel moderator, followed by a presentation from each of the invited panel members. Time was then left for open discussion among all workshop participants regarding the topics addressed by the panelists. At the end of each day, there was additional time for general discussion among all of the workshop participants.
Roadmap Overview by NASA
The workshop began with a presentation on the NASA draft roadmap for TA09 by Mark Adler. Other roadmap authors were also in attendance. Adler addressed the general EDL challenges: “not burning up, slowing down in time, hitting the target, and surviving the impact.” Related to the challenges, Adler presented the benefits of EDL technologies, particularly focusing on enabling and enhancing capabilities: increased mass to destination, increased planet surface access, increased delivery precision to the surface, expanded EDL timeline to accomplish critical events during entry, increased robustness of landing system to surface hazards, enhanced safety and probability
of mission success, human safety during return from beyond low Earth orbit (LEO), and sample return reliability and planetary protection. In developing the roadmap, Adler commented that the authors tried to take a snapshot of future missions in order to choose the technologies and map them to those missions. Only technologies that were deemed feasible in the 2010-2030 timeframe were considered, although they were influenced by longer term missions (e.g., human Mars surface mission) due to their very long lead times. The remainder of the presentation presented an overview of each of the level 2 technology areas in the roadmap and the technologies found in each: Entry, Descent, Landing, and Vehicle Systems. Finally, one slide was presented on crosscutting EDL technologies, with the comment that there are very few applications outside of NASA for many of the technologies in the roadmap. A few examples were some TPS overlap with DOD systems, launch abort for commercial crew, and a potential emerging market for commercial applications of EDL technologies for suborbital and orbital vehicle recovery.
Adler’s presentation was followed by a question and answer session. One question was asked about the affordability of testing, to which the roadmap authors answered that for many EDL technologies, testing must be done at the target (e.g., Mars), because it is very difficult to test in a relevant environment at Earth. Because of the cost of doing this, most Mars missions have built on the technology demonstrated during Viking and Mars Pathfinder— very little new technology development has occurred since. Another workshop participant asked about the status of NASA’s arcjet facilities, in light of the cancellation of the Constellation program (arcjet facilities became an ongoing topic of discussion throughout the 2-day workshop). Other questions focused on specific technologies, particularly lift-to-drag for aeroshells, initiator technologies, and materials.
Panel A: Non-NASA Government Agencies
James Keeney (AFRL) began this session with a presentation that focused on how AFRL in particular (and private industry in general) could benefit from the EDL technologies proposed in the roadmap and how AFRL could play a role in the development of those technologies. He commented that most of the agreements and sharing of expertise, technologies, and assets occur at the principal investigator level through personal associations, but that it would be beneficial to formalize these associations so that they can occur more at the corporate level. In terms of EDL, AFRL would be interested in teaming up with NASA to bring some of their experiments back to the surface from LEO (space weather research was given as a prime example). Commercial entities focus primarily on LEO, and Keeney was concerned as to how NASA is going to bleed their technologies into COTS efforts to help keep costs down. A key deficiency in the roadmap, as seen by Keeney, is the lack of interdependencies between other agencies, national labs, and international partnerships. Keeney also pointed out that AFRL has a lot of facilities that NASA could potentially leverage, such as wind tunnels, and he does not see NASA looking beyond their current facilities in the draft roadmap.
Audience questions focused on specifics of the experiments (200 kg class), AFRL sensors (lidar and radiofrequency-based units), and expertise in building terrain maps (something the DOD excels at and could translate to planetary applications for NASA). Another audience member asked if there is any cross-correlation with NASA in terms of modeling activities. Keeney commented that while the roadmap specifically points out that there is a problem with testing (which he agrees with), there are no solutions proposed to fix this. Most of AFRL’s testing is Earth-based, while expansion to other planets’ atmospheres falls more within NASA’s purview.
Carl Peterson (Sandia, retired) discussed the perceptions that have charted the course for NASA EDL thus far. Peterson asserted that the expense of the “test what you fly, fly what you test” approach has restricted NASA from testing and using new technologies instead of relying on Viking-era EDL technology and methodology (e.g., entry vehicle shape, parachutes). Furthermore, Peterson continued, engineering technology often does not get enough investment, as technologies are developed specific to each particular mission. If NASA wants future missions that expand current capabilities (to enable new destinations and sample return, for example), past EDL technologies are not good enough. Peterson commented on the possibility of teaming up with the Air Force (or DOD in general), since there are overlapping technology needs. Peterson suggested that continuity of technology development funding is critical, and bureaucratic oversight and reporting requirements should be kept to a minimum. Also, the need to re-evaluate and make changes to the R&D goals is periodically necessary. Peterson also stressed that EDL
technology development is a strategic objective, which requires continuous effort and should not be revised by every new administration. A NASA participant in the workshop agreed that the constantly shifting priorities and budgets within NASA have made this a challenge in the past, and that the goal of the roadmaps is to provide that continuity over the long term. In terms of sequencing and schedule, Peterson believes that the near-term schedule in the draft roadmap is overly optimistic. Finally, Peterson believes that the predominantly test-based approach is no longer going to be affordable. Instead, NASA will need to capitalize on advances in computing and in modeling and simulation, and full-scale flight tests should be limited in number and used as a qualification tool (not a design tool).
Several key discussion points came up in the Panel A question and answer session. First was a discussion over collaboration with other agencies. Suggested collaborations included national labs for supercomputing, and Missile Defense Agency for reentry modeling. A key point was that contractual agreements should be signed to jointly maintain facilities. With regards to facilities, there was also significant discussion on the need to emphasize facilities issues in the roadmap. Second was a discussion over modeling and simulation and its relationship to testing. Several speakers commented that models must be validated with tests—you cannot believe your computational models until you have some verification. Every opportunity should be used to gather data, including instrumenting actual flights. The role of testing has changed though—instead of being used for design, it now needs to be tied into validating prediction methods. Several audience members also commented on the need for integrated system demonstrations to avoid the TRL valley of death (aerocapture is a popular example), and the roadmap should include milestones for dedicated technology demonstration missions. Third was a discussion over the focus of the roadmap— i.e., should it focus on Mars, or was it already too focused on Mars? A NASA staff member commented that there should be a core capability of investment that is not tied to a single program office, since programs come and go. However, in a constrained budget environment, it is difficult to have parallel paths and technologies must be justified by their use in missions. There was concern over the roadmap focusing too much on a human Mars landing. Instead, many believed that the roadmap should focus on more near-term goals, since technology may become obsolete by the time NASA is ready to do a human Mars mission. Finally, in terms of industry, long-term objectives and funding continuity are also needed—it is the only way to get industry to invest some of their own money into technology development.
Panel B: Industry I
Arthur Grantz, Boeing, focused his presentation on entry from LEO, which he saw as a gap/weakness in the draft roadmap. Just as TPS materials and technologies were “lost” after Apollo, he fears that the same will happen now that the space shuttle has been retired. Return from LEO will continue to be important in the coming years, and should be made a priority. He believes that reusable TPS materials, manufacturing processes, and maintainability are at a critical tipping point. He believes that the roadmap, however, focuses too much on new ablative TPS materials. He also discussed areas of overlap between high-speed Earth return (e.g., from Moon or Mars) and LEO return. Additionally, Grantz believes that instrumentation should be required on EDL missions to improve/validate computation models. Infrastructure also needs to be maintained, particularly arcjet facilities. The roadmap should also include more Earth atmospheric flight testing of LEO and higher entry velocity systems.
Al Herzl, Lockheed Martin, discussed the EDL technologies that he believes are needed: TPS materials, high-temperature insulation and structures, aeroshell systems, mechanical separation and deployment systems, parachutes, propulsion systems, landing and hazard avoidance sensors and algorithms, and landing gear. He believes that missions must be identified to pull more mature technologies. Along the same lines, he believes that every mission has the responsibility to further technology development. He also sees seeking out commercial markets as beneficial, and commented that academia and industry both want to work on technology development, so NASA should try and collaborate. Finally, be believes that test programs are the key to confidence—you need test data to build the analysis and then to validate your models.
Steve Jolly, Lockheed Martin, discussed what areas of the roadmap he agreed with and what areas need modification. Overall, he agreed with the key recommended areas of technology development with the exception of the small body technologies (should potentially go in a separate roadmap). He also believes that the draft roadmap does not focus enough on integrated system approaches, which he believes is critical for EDL systems that tend
to be highly integrated and highly coupled. He also believes that the focus is too much on planetary missions, and not on Earth return from LEO, HEO, Cis-Lunar or NEO destinations, which he commented “hasn’t been solved.” He agreed with the recommended immediate actions listed in the roadmap, as it is important to pick out the low-hanging fruit. He listed was he believes to be the top EDL technical challenges: qualification of TPS (and the need for arcjet facilities), qualification of decelerators (parachutes), re-contact threats, hazard avoidance, horizontal velocity and touchdown, and ground surface interaction. Finally, he also listed what he sees as the game-changing technologies: decoupling terminal descent propulsion from touchdown gear, GNC sensors, steerable decelerator technology, critically damped airbags for touchdown, aerocapture, terminal descent retro propulsion, and supersonic deployment of FBC-like EDL structures to avoid re-contact.
Don Picetti, Boeing, believed that the roadmap is comprehensive in scope, and a good balance between near-term and far-term investments. He thought that having parallel paths and quantitative targets for technology development were strengths of the roadmap. Picetti was also concerned with reusable Earth entry systems, which could help improve operations by commercial providers. He also emphasized the importance of high-fidelity modeling and integrated system simulations. In particular, he discussed the need to coordinate with other NASA technology programs (e.g., Aeronautics) to acquire data, the need to upgrade and maintain ground test facilities, and the need to instrument future NASA missions. He saw the top technical challenges as follows: deployable and inflatable decelerators (game-changer), supersonic retropropulsion (game-changer), and precision landing. The high-priority areas that he identified were: flight testing/ground testing and facilities, rigid aeroshells, deployable and inflatable decelerator systems, supersonic retropropulsion, and integrated high-fidelity M&S. He believes that near-term investments should be guided by potential for high impact on future missions. For LEO return, this would include robust TPS and health monitoring. For solar system exploration, this includes rigid/deployable aeroshells and TPS, supersonic retropropulsion, adaptive GN&C, integrated system M&S, and ground facilities.
Open Discussion
The first day’s discussion featured several key themes:
1. There was a lot of discussion during the first day of the workshop with regard to industry’s role in the development/implementation/sharing of EDL technology development. One area of concern was how NASA would transition these technologies into industry. Some workshop participants did not see a big push for commercial applications. Others saw applications to venture tourism, and want NASA to provide a push for the commercial space industry. Furthermore, there was discussion over what the best role for NASA is, what the best role for industry is, and how the two can effectively work together. Many speakers said that for planetary exploration, NASA should be in the lead with industry participating (since it’s a science endeavor and there is no current business case). However, in terms of LEO missions (particularly improved performance, lower cost, higher reliability), NASA should spin these technologies off to industry. Additionally, some comments were made that part of NASA’s role should be to maintain core technology and facilities.
2. Another common theme was the issue of flight testing. A question was posed as to how game-changing technologies are going to be tested, in particular with respect to SRP. There was subsequent discussion about how much testing could be done in Earth’s atmosphere or in ground facilities, or if a technology demonstration mission at Mars would be required.
3. Related to testing, there was a lot of discussion with regard to facilities, in particular arcjet facilities. There is significant concern over the potential shutdown of these facilities, in that they are needed for testing and qualifying TPS materials. There was some commentary about needing mission pull to keep these facilities up and running, and that testing for technology development and/or model validation can be used to fill the downtime between missions.
Panel C: Industry II
Neil Milburn, Armadillo Aerospace, focused on the role that Armadillo Aerospace (and other small, start-up companies) could play in the EDL technology development. Armadillo Aerospace’s strength is in rapid prototyping and flight testing. They also have a strong simulation capability that they have a lot of faith in because it is backed with flight testing. Milburn discussed the test-bed capabilities and vehicles of Armadillo Aerospace. Some areas that they could do testing in are soft landing, plume mitigation and impingement, and suborbital testing of EDL technologies like ballutes and parachutes. In particular, they are working on the development of a reusable sounding rocket that could launch 10 to 20 kg to almost 500 km. Essentially, Armadillo could provide a very inexpensive test platform at the subscale level for EDL technology development.
Colin Ake, Masten Aerospace, also discussed the capabilities of Masten Aerospace and how they could contribute to EDL technology development. As with Armadillo Aerospace, he believes that small start-up companies can play a role in helping to test and demonstrate EDL technologies. Ake provided an overview of some of the Masten vehicles, which like Armadillo, also participated in the lunar lander challenge and the NASA Cruiser program. Masten’s experience is mostly focused on descent and landing, and they’ve been used before as a vertical touchdown test platform. Ake’s roadmap recommendations focused on the landing aspect of EDL, and include precision landing, validating plume impingement computational fluid dynamics, propulsion (not adequately covered in the roadmap), and integrated vehicle health monitoring. Ake emphasized the need to validate models with test data, and to do as much Earth-based testing as possible. Ake also emphasized facilities and suggested using industry resources where possible. He suggested that the roadmap should include milestone for technology demonstrations. Finally, he addressed the issue of whether there is a business case for small industry—he believes that small companies can make a business case out of being a testbed, technology developer and technology demonstrator.
Reuben Rohrschneider, Ball Aerospace, discussed the benefits of creating the technology roadmaps with regard to industry participation. If industry can see that there is a long-term plan and long-term funding, it is more likely that they will participate in the technology development. However, one criticism he had of the roadmap was that it was too focused on Mars. He believes that NASA needs to perform architecture studies (similar to what’s been done for Mars) for other destinations—this will help to define what the EDL technology requirements are for other missions. Rohrschneider then discussed the technologies that he believes to be important: safe and precise landing (particularly terrain relative navigation and hazard detection), deployable aerodynamic decelerators (these have broad applicability beyond Mars, despite the roadmap focusing the details for these at Mars), and material testing and development. In terms of materials, Rohrschneider commented that while materials are being developed in other industries, they often do not test or provide data for the conditions required for EDL. Therefore, he believes test facilities for materials (beyond just rigid, ablative TPS) are also critical. Rohrschneider also emphasized the need to reduce margins— this can be achieved through better knowledge of the environment, improving modeling capabilities, and reducing testing uncertainties. He also commented on the need for instrumenting flight missions to collect data.
Al Witkowski, Pioneer Aerospace, focused his discussion on decelerators, highlighting two current large parachute development programs. He commented on the fact that NASA is still using essentially the same parachute technology that was used on Viking (for Mars) and Apollo (for Earth). The primary user of these specialized decelerator systems is NASA and, historically, funding associated with a given mission must be used to reduce risk, thereby precluding the time and cost of a new decelerator development program. However, heritage decelerator technology in its current state cannot be used to land heavy payloads on Mars. Witkowski sees the top technology challenges as follows: lack of materials data for accurate modeling, lack of validation data for modeling of flexible systems (parachutes, inflatables, etc.), and affordable ways to do full-scale testing. Overall, Witkowski believes the draft roadmap is good, but needs consistent and persistent long-term funding for it to be successful. In addition to technology development, foundational basic research of flexible materials is also needed, which is where universities can play a role. Finally, he believes that decelerator measurement test capabilities are needed (e.g., stress, strain, shape, etc.) to develop models and to provide model validation. This can start at small scales, but full-scale testing will eventually be needed.
Following the four panelists presentations, there was a long question and answer session, with a focus on materials, in particular with the application toward flexible TPS (although one audience member commented that the problem is bigger than just flexible TPS). In general, NASA and the United States are not developing new materials, but instead are borrowing materials from other industries, which are often manufactured overseas. With regard to modeling and simulation, there was a general sentiment that flexible materials (e.g., parachutes and inflatables) cannot be currently modeled. While tests are needed to help build and validate models, there is also technology development that is required with regard to testing techniques (the example of measuring strain in a flexible material was given as one particular challenge). There were also several comments with regard to the need for NASA to develop a common materials database—in particular, with materials properties and regimes that are needed for EDL.
With regard to materials, a question was asked about why inflatable decelerators have not yet reached flight readiness despite years of funding— it is a technical or funding issue? One panelist answered that there is a technical hurdle to flexible TPS, particularly with regard to materials. Also, most technology development up to now has been done as part of flight missions, and no mission is willing to accept the risk of a low-TRL item like inflatables (aerocapture was another example given in this category). Since most EDL technologies are single-point failures, it is almost impossible to fly an unproven technology on a science mission. A technology demonstration mission would be required, where science is not the crux of the mission.
One audience member asked about instrumenting high-altitude flight tests to collect data and suggested that NASA should provide seed money for this instrumentation. Several comments were made re-iterating the need to instrument test flights. While some things can be tested in a laboratory setting, flight tests will still be needed.
There was further discussion about the role of NASA versus industry. Several comments were made that NASA should not be competing with industry, but should be sharing knowledge and encouraging the growth of small companies in particular. However, technology transfer is difficult, without actually moving the people with the expertise. Another comment was made with regard to facilities—NASA has to maintain certain facilities because industry cannot afford to do it.
There was also some discussion on the importance of reducing margins. What mostly impacts margins are the assumptions going into the modeling. Generally, margin is being added on top of the baseline design, which already has margin hidden in it. Rohrschneider commented that sensitivity analyses to the assumptions are rarely done.
Finally, the focus of Mars on the roadmap was discussed. The roadmap authors commented that when the roadmap was being written, Mars missions were continuing and directed, while other targets were competed, so there was no guarantee in which targets would be visited. However, there was also an attempt to focus on Earth return in the draft roadmap. Another roadmap author commented that the hardest EDL problem is landing humans on Mars, so it warrants attention. There was also discussion about stepping stone technologies that can be done in the near term, which will eventually contribute to a human Mars mission (decelerators, SRP, inflatable reentry vehicle experiment). The general sentiment in the audience was that the Earth-return segment needed to be strengthened, in particular with regard to supporting commercial missions.
Panel D: Academic Organizations
Robert Bishop, Marquette University, focused his discussion on the GN&C portion of the roadmap. He focused on three areas:
1. Aeroshells— need more lift; guidance should be integral in the design of aeroshells, not an afterthought
2. EDL = GN&C— need smart sensors and need to think about their role in navigation (and vice versa)
3. Education— roadmap did not address education very well, but need to keep students excited and engaged to develop the next generation of engineers
Bishop then addressed what the current state of EDL is: at entry (hypersonic), vehicles have a lot of lift and controllability, but don’t have good knowledge of state; once the parachute is deployed, you have a good knowledge
of your state, but no longer have sufficient controllability. Therefore, he believes the focus should be on more sensors and location knowledge at high altitudes. He believes that a tipping-point technology is robust modular GN&C algorithms, where these can move from mission to mission without software holding up the development. He believes a game-changing technology to be aeroshells with high lift. Echoing many other presenters, Bishop also emphasized the need to instrument EDL missions. Overall, Bishop believes that the draft roadmap needs a strong GN&C focus.
Jean Muylaert, von Karman Institute for Fluid Dynamics, began his presentation with general comments with regard to the draft roadmap. First, he believes that the link between industry, academia, and NASA is important. Second, he believes in the need to return to a vigorous ground and flight test program (but how?). Third, he emphasized the importance of physical model validation with testing (and the need for upgrading ground-based test facilities), risk analysis, and qualification at the integrated EDL level. Muylaert then discussed the in-flight experimentation strategy carried out in Europe. He believes that in-flight research test-beds should be emphasized more— in Europe, this is done on cheap launches, suborbital flights, etc., in order to bridge the gap between ground-based tests and flight data. EXPERT is one example of an in-flight test bed that he discussed in his presentation.
Tayfun Tezduyar, Rice University, focus was on parachutes and, in particular, on fluid-structure interaction modeling. This is one of the most difficult problems to test, Tezduyar explained: because parachutes are so light, many of the classical fluid-structure interaction techniques do not work, although much progress has been made over the past several years. Tezduyar discussed a set of methods developed at Rice University that have produced good results thus far. He also emphasized the need for flight test data in order to benchmark computational modeling.
In the question and answer session that followed the Panel D presentations, Muylaert was asked about ESA’s EXPERT program and how NASA could fund similar technology-dedicated missions. Muylaert discussed how ESA has a technology directorate and a program directorate—in getting EXPERT funded, they included the programs directorate in the discussion, which he claims helped tremendously. Essentially, it created a new vision/strategy with regard to in-flight research.
The panelists were then asked about their view on game-changing technologies. Tezduyar answered that there needs to be a bigger role for computational modeling in the overall process (particularly fluid-structure interaction). Bishop believes that developing GN&C technology to do a pinpoint landing at Mars would be game-changing. However, without a technology demonstration mission, vehicles with more lift will not be utilized.
Finally, there was discussion with regard to education, and how to link products from graduate students to NASA.
REFERENCES
Brady, T., and Paschall, S. 2010. The challenge of safe lunar landing. IEEE Aerospace Conference, Big Sky, Montana, March 6-13, 2010. Available at http://ieeexplore.ieee.org/.
Brady, T., Paschall, S., Zimpfer, D., Epp, C., and Robertson, E. 2009. Hazard detection methods for lunar landing. IEEE Aerospace Conference, Big Sky, Montana, March 7-14, 2009. Available at http://ieeexplore.ieee.org/.
Brady, T., Paschall, S., and Crain, T. 2010. GN&C development for future lunar landing missions. AIAA Guidance, Navigation, and Control Conference, Toronto, Ontario, Canada, August 2-5, 2010. American Institute of Aeronautics and Astronautics, Reston, Va.
Grantz, A.C., Experimental Systems Group, Boeing Company. 2011. “TA-09 Entry, Descent, and Landing Panel Discussion,” presentation at the National Research Council NASA Technology Roadmaps Panel 6 Workshop, Irvine, Calif., March 23, 2011. National Research Council, Washington, D.C.
Justh, H.L., Justus, C.G., and Ramey, H.S. 2011. Improving the precision of MARS-GRAM. Fourth International Workshop on the Mars Atmosphere: Modelling and Observation, February 8-11, 2011, Paris, France. Available at http://www-mars.lmd.jussieu.fr/paris2011/abstracts/justh_paris2011.pdf.
Justus, C.G., Duvall, A., and Keller, V.W. 2005. Mars aerocapture and validation of MARSGRAM with TES data. 53rd Joint Army-Navy-NASA-Air Force (JANNAF) Propulsion Meeting, December 5-8, 2005. Available at http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa .gov/20060005595_2006003663.pdf.
Mavris, D.N., and DeLaurentis, D.A. 2000. Methodology for examining the simultaneous impact of requirements, vehicle characteristics, and technologies on military aircraft design. 22nd Congress of the International Council on the Aeronautical Sciences (ICAS), Harrogate, England, August 27-31, 2000. Paper ICAS-2000-1.4.5. Available at http://www.icas-proceedings.net.
Muylaert, J., von Karman Institute for Fluid Dynamics, Belgium. 2011. “EDL Workshop: Review of the NASA Technology Roadmap TA09,” presentation at the National Research Council NASA Technology Roadmaps Panel 6 Workshop, Irvine, Calif., March 24, 2011. National Research Council, Washington, D.C.
NASA (National Aeronautics and Space Administration). 2011. Programs and Missions: Missions, Mars Exploration Program. NASA. Available at http://mars.jpl.nasa.gov/programmissions/missions/.
NRC (National Research Council). 2011. Vision and Voyages for Planetary Science in the Decade 2013-2022. The National Academies Press, Washington, D.C.
Paschall, S., Brady, T., and Cohanim, B. 2008. A self contained method for safe and precise lunar landing. IEEE Aerospace Conference, Big Sky, Montana, March 1-8, 2008. Available at http://ieeexplore.ieee.org/.
Peterson, C., Sandia National Laboratories (retired). 2011. “Thoughts on NASA’s Future Investments in EDL Technology,” presentation at the National Research Council NASA Technology Roadmaps Panel 6 Workshop, Irvine, Calif., March 23, 2011. National Research Council, Washington, D.C.
Picetti, D., Boeing Company. 2011. “NASA OCT Technology Roadmap Study,” presentation at the National Research Council NASA Technology Roadmaps Panel 6 Workshop, Irvine, Calif., on March 23, 2011. National Research Council, Washington, D.C.
Rohrschnedier, R., Ball Aerospace Corporation. 2011. “Panel 6: Entry, Descent, and Landing,” presentation at the National Research Council NASA Technology Roadmaps Panel 6 Workshop, Irvine, Calif., March 24, 2011. National Research Council, Washington, D.C.
Thoemel, J., Muylaert, J-M., Ratti, F., and Gavira, J. 2009. In-flight testing of critical technologies and experimentation of aerothermodynamics phenomena. AIAA Paper 2009-7232, 16th AIAA/DLR/DGLR International Space Planes and Hypersonic Systems and Technologies Conference, Bremen, Germany, October 19-22, 2009. American Institute of Aeronautics and Astronautics, Reston, Va.























