
5
Railways Infrastructure
INTEGRATION OF REAL-TIME CONDITION MONITORING SYSTEMS FOR MAINTAINING AND SUSTAINING RAILROAD INFRASTRUCTURE
Mehdi Ahmadian,
Virginia Polytechnic Institute and State University (Virginia Tech)
Ahmadian noted that railway systems are valuable in that they provide guided pathways for heavy loads (500 ton miles per gallon); however, they are also challenging because, unlike highway systems, they do not provide detours when problems arise. Nevertheless, because highways generally offer the transportation capabilities of only 175 ton miles per gallon, railways are still the preferred, more efficient mode of transportation for defense equipment.
Ahmadian focused on ways to incorporate new technologies to assess the condition of the railway infrastructure and then intervene and repair it. Such improvements require substantial and costly changes to the infrastructure. He noted that industry embraces technologies only once they induce profit. Derailments have increased since the 1980s, and such technologies could help detect potential rail failures and wheel failures before they happen, which could prevent future derailments. Providing a historical perspective, Ahmadian noted that since the Staggers Rail Act of 1980 when the rail industry was deregulated, railways have become more efficient and have begun to embrace technology. He commended the rail industry’s collaborative approach to research, which involves the private, public, academic, and government spheres. He explained that, as members of the
Association of American Railroads (AAR),1 all of the railroads contribute money toward research (on the order of $14 million) conducted at the Transportation Technology Center in Colorado.
In 2005, the Railway Technologies Laboratory (RTL) was established at Virginia Tech as an AAR Affiliated Laboratory. Other AAR Affiliated Laboratories are located at the University of Illinois, Urbana-Champaign; Texas A&M University; and the University of Alberta. RTL’s mission is to “explore and help implement technologies that will help the U.S. railroads become more efficient and competitive in their day-to-day operation,” according to Ahmadian. Typically, the RTL proposes 10-12 projects (e.g., related to infrastructure, operations, signal and train control, vehicle/track interaction, and motive power and equipment), and a committee selects a few whose technologies could be implemented in 5-10 years. In addition to its work under the umbrella of AAR, RTL has also done work for the Federal Railroad Administration (FRA).2 He emphasized the value of understanding the mechanical and material aspects of the railroad to understand the full system, as he believes the railway system is the most complex form of transportation from a mechanical engineering perspective.
Ahmadian described the structure of the rail track: the track is loosely connected to the ground with ties (primarily made of wood, but occasionally made of concrete or composite materials), allowing it to be simultaneously floating and stable so as to maintain operation under various loads. He described the rail as similar in shape to an I-beam with a wide base, which allows for a bendable structure. The challenge arises when holes are drilled into the track to install joints, contributing to deterioration. He noted that the United States utilizes a continuously welded rail—39-foot segments of rail are welded together and placed. But for signaling purposes, the rail has to segmentize by electrically isolating joints, essentially making each segment its own electrical current that will close upon signaling from the train. Ahmadian highlighted positive train control as a new development to replace this process, which utilizes global positioning technology to control and locate trains.
He added that rails are classified according to their weight per yard—the 136 rail is the most common in the United States (i.e., each yard weighs 136 lb). Heavier loads may need to be transported on a 142 rail, while lighter loads could be transported on a 115 rail, for example. The hope for the future, according to Ahmadian, is that small internal flaws in the rail that could lead to derailments will be caught before coming to the surface, or at the surface, using automated processes.
Ahmadian noted that freight and passenger trains primarily use S-plate wheels because the raised portion, or flange, prevents the wheel from falling between the
___________________
1 The website for the American Association of Railroads is https://www.aar.org.
2 The website for the Federal Railroad Administration is https://www.fra.dot.gov/Page/P0001.
tracks. The wheel is also tapered so as to enable it to go around a curved track. He explained that the radius differential between the running surfaces on either side of the wheel is governed by the displacement of the wheel as it goes around a turn. The wheel subjects the rail to various forces in the vertical and lateral directions, and these forces will change as the wheel wears over time, resulting in additional challenges for the rail. Each time a train passes, the rail is pushed down in compression in some sections, while the rest remains in tension.
Ahmadian explained that the rail deflection is inversely proportional to the modulus of the elastic foundation of the rail. And as the wheel passes over the rail, he continued, the rail is subjected to reverse bending, which causes material fatigue and rail degradation. It is difficult to avoid stress from reverse bending as rail cars continue to get heavier (e.g., 320,000 lb rail cars are in use now); however, stronger foundations, uniform foundation stiffness, better management of water runoff, better ballast management, and better tie management could reduce rail strain from reverse bending.
According to Ahmadian, broken rails or welds are the major cause of train derailments. Other causes include broken wheels, bearing failures, and issues with track geometry, for example. In addition to the reverse bending that is caused by moving loads, rail and wheel life are significantly affected by creep forces (i.e., spinning wheels unable to get traction). This motion creates shear force against the rail and cold-forms patches of spalled material, which can eventually cause the rim to break. If there is a flaw or crack in the wheel, this process hastens, he explained. In the rail itself, these high creep forces cause rolling contact fatigue. Rolling contact fatigue is the major reason for wheel removal and rail replacement. By grinding the rail and the wheel, surface defects can be eliminated. He suggested that although this process can restore the rail to near-new condition, it cannot be done too frequently since it is removing material from the rail. The debate about when and how much grinding to do continues throughout the industry. Aside from being influenced by train traffic and wheel loads, rail life can also be affected by track geometry—for example, tracks without bends are expected to last longer than those with.
Having a better understanding of the wheel-rail interface mechanics and dynamics leads to improved safety and lower spending, according to Ahmadian. The RTL uses a state-of-the-art roller rig to study the force and events that happen under different conditions under the rolling wheel and the rail. This technology allows for both precision and repeatability. He explained that while the industry needs this technology, it is not ready to invest in it. He added that the RTL team also designed a novel force measurement system to measure the forces of the contact patch remotely. His team was also responsible for a joint health monitoring project that was deployed in the field in 2016 for revenue service testing using piezo-ceramic materials as sensors. These sensors can detect internal weak links
in the joint before they surface based on the impedance change that has occurred in the rail. The RTL is also engaged in detecting early stages of rolling elements’ failure, using ultrasonic acoustic emission microphones. This technology can be used to detect early stages of axle bearing failures or rolling contact fatigue on the rail. Another RTL project, Ahmadian continued, has investigated the utilization of camera technology to detect the condition of the rail with a high degree of precision from a moving platform.
In closing, Ahmadian reiterated that the mechanics and materials of railroads present an incredibly challenging engineering environment. Although the industry has experienced much improvement during the past two decades, there is more work to do. He emphasized that the needed technology already exists, as it has been adapted from the military and aerospace domains; the major hurdle is convincing for-profit railroads to invest in these technologies.
Discussion
General Paul Kern, The Cohen Group, asked what the United States can learn from European rail research and development. Ahmadian noted that, in some ways, Europe is ahead of the United States in research because it has access to more government funding. However, the United States exceeds Europe’s capabilities in moving heavier loads on the rails. He added that Europe is primarily concerned with passenger rail, while the United States is concerned with both passenger and commercial rail. In a response to a question from Robert Pohanka, National Nanotechnology Coordination Office (retired), Ahmadian noted that wheels are not manufactured with long-life coatings. He said that these so-called rubber wheels do not withstand the wheel loads. Jesus de la Garza, Virginia Tech, asked whether there are any data that compare reverse bending in locomotive and nonlocomotive cars. Ahmadian said that the data reveal more exaggerated reverse bending under the locomotive cars than the rail cars. Ultimately, when there are more axles closely spaced, then there is more variation in the reverse bending.
Dianne Chong, Boeing (retired), asked whether studies are being conducted on the connection between microstructural change and accelerated deterioration. Ahmadian highlighted a project (started in January 2016) in which he is involved that considers what the microstructural changes are as a result of high shear loads and how they progress before rolling contact fatigue has surfaced as visible damage. De la Garza asked whether best practices regarding drainage apply to the railway industry, and Ahmadian responded that drainage is a best practice on the rails alongside wheel or axle load.
RISK-BASED FACILITY MANAGEMENT APPROACH FOR BUILDING COMPONENT CONDITION, RELIABILITY, AND SERVICE LIFE PREDICTION USING A DISCRETE MARKOV PROCESS
Michael Grussing, U.S. Army Engineer Research and Development Center
Grussing, a member of the Construction Engineering Research Laboratory (one of the seven research laboratories that make up the Corps of Engineers Engineer Research and Development Center3), spoke about the Army Corps of Engineers’ work on service life predictions. His current project in the Sustainment Management Systems program collects and synthesizes information about various civil infrastructure and facility assets in order to understand their condition and performance as well as to plan maintenance, repair, and replacement of those facilities. This work helps decision makers invest their scarce resources more efficiently to sustain these facilities. Because the Department of Defense (DoD) has a few hundred thousand buildings (i.e., approximately 2 billion square feet), the Sustainment Management Systems program has focused specifically on the building side of infrastructure. He explained that as people retire from working on the various installations, there is much institutional knowledge that is lost, so this program attempts to capture and centralize much of that type of information.
One of the tools that this program has developed is the Builder Sustainment Management System. It focuses specifically on standardizing the process of DoD’s building facilities because each service inspects and assesses its facilities slightly differently, making it difficult to compare infrastructure conditions. Through its vast data collection, the program is now able to compare the service life of components of various buildings. Grussing emphasized the importance of performance condition prediction and illustrated the process utilized from inventory, to assessment, to prediction, to work planning, to forecasting.
During the inventory stage, information is collected about the various components that make up a particular building, and each component is classified by type based on the ASTM UniFormat Classification System. The next step, Grussing explained, is to assess the condition of each individual component using a standardized scoring system. This score is then used to predict effects on service life, to determine what sort of work is needed, and to generate work plans. These work plans include forecasts of maintenance, repairs, and replacements over multiple years.
Grussing cautioned that there are many challenges in using prediction models. One of the first is to capture enough data to understand infrastructure condition at a particular point in time without being overly data intensive. He explained that the age
___________________
3 The website for the U.S. Army Corps of Engineers Engineer Research and Development Center is http://www.erdc.usace.army.mil.
of an asset helps to make predictions about its service life and timeline for degradations, although sometimes components can be in better condition than expected or the actual age of a component can be determined incorrectly (e.g., if a build date is used instead of a replacement date). As a result, there are issues in using age (i.e., a deterministic approach) as the primary factor in predicting condition. An alternative approach (i.e., the stochastic) relies more on probability by collecting large amounts of data over time for a specific component to understand how it behaves over time.
Grussing’s team opted to use a discrete Markov chain process instead—it considers the component’s condition from its previous assessment, as opposed to its age, and models transitions across a number of states by defining a characteristic transition matrix that describes the probabilities of transitioning from one condition state to another. It helps reveal how the component may progress from a good state, to a poor state, to a failed state; Grussing described this as a memory-less process since the next state depends only on the current state. He clarified that the aspect of time is not completely removed from the process, however, since the objective remains to model component degradation over time. The probability of current and future conditions is based on previous conditions, and because planning cycles occur on an annual basis, that increment is used in the model’s equation. He added that the transition matrix will be different for different types of components owing to different underlying deterioration modes.
This matrix is developed through the following process:
- Data collection: Classifying and quantifying the component as well as trying to determine its year of installation.
- Condition assessment and state mapping: Taking the inspector’s input and translating these qualitative observations into a quantitative score that reflects the physical condition of the component on a 0 to 100 scale.
- Data assembly: Viewing pairwise condition observations of each asset.
- Data filtering and partitioning: Grouping data by key characteristics such as UniFormat classification, material, or climactic regions and developing a characteristic transition matrix for each group using the pairwise observation data; partitioning by observation interval; and partitioning into training and testing data sets.
- Count state transition frequencies: Counting transitions for each condition state pair for each observation interval to develop transition frequency matrices.
- Optimization of characteristic transition matrix: Employing an algorithm that uses the transition frequency matrix from each observation interval to determine the characteristic deterioration matrix, which shows how one expects a component, based on its classification, to progress through its condition states over time.
This resulting probabilistic model can be used for condition index forecasting (i.e., expected condition state based on probability distribution, similar to exponential decay function), reliability forecasting (i.e., probability of remaining in current state as opposed to deteriorating, similar to Weibull cumulative probability distribution function), service life estimation (i.e., Monte Carlo simulation of deterioration and comparisons in condition index over time), risk-informed work planning (i.e., consideration of reliability and importance indices of individual components to understand their effects on the overall system or building), and inspection scheduling and planning. Grussing emphasized that a model is only as good as the quality of the inspection information.
In closing, Grussing summarized that the discrete Markov process is a beneficial approach to modeling and predicting component deterioration, driven by information collected during inspections. This process supports the transition from a rules-based process to a data-driven process for risk-informed facility asset management.
Discussion
Michael McGrath, McGrath Analytics, LLC, asked Grussing if his model will eventually need to evolve to a time-dependent transition probability. Grussing noted that the next step will be to conduct a hybrid of the Markov process in which one can bring that kind of time-dependent aspect into the model. Doing so could allow for other explanations of the component’s movement to the next condition state. He added that there are other types of data (currently unavailable) that could also play a role in future analyses. Kern asked how Grussing deals with obsolescence in the models, and he responded that the research he described focuses only on the condition index (i.e., technical service life), which intentionally separates aspects related to obsolescence and changes in mission or user requirements. He added that those aspects would be measured with a separate index (related to functional service life), as they too can drive the need to replace a component. De la Garza suggested simply multiplying the physical and the functional indices to generate an overall performance index for a more comprehensive understanding of a facility, but Grussing noted that the research is not quite that advanced in the functional space. He added that the funding for buildings is very specific about the difference between sustainment and modernization, which would include the aspects of functionality and obsolescence. Peter Matthews, USTRANSCOM, asked whether DoD plans to do any longer-term predictions. Grussing noted that the tool he described is primarily being used by DoD for allocation budgets. DoD’s current facility sustainment model is based on square footage, regardless of the building’s age or condition. So while this model will not help secure more funds, it will help determine how to better spend the money. Grussing added that it will likely be
impossible to eliminate reactive maintenance, although this model may prompt more proactive maintenance.
USE OF CONTINUOUS VERTICAL TRACK DEFLECTION MEASUREMENTS TO MAP SUBGRADE CONDITIONS ALONG A RAILWAY LINE
Michael Hendry, University of Alberta
The University of Alberta started work in 2003 on the Railway Ground Hazard Research Program, according to Hendry, in collaboration with Canadian Pacific, Canadian National, Queens University, and Transport Canada. The program investigated and quantified hazard and risk resulting from natural hazards (e.g., landslides, rock falls, avalanches, floods). These events were characterized as high consequence and low frequency. In 2011, a collaboration among the University of Alberta, Canadian Pacific, Canadian National, Transport Canada, and the Association of American Railroads-Transportation Technology Center emerged as the Canadian Rail Research Laboratory.4 A much broader program than the one in 2003, this work focused on using field data to explore engineering problems more prevalent in the Canadian climate (e.g., air break leaks, impacts from frost and cold weather, ballast fouling) and developing an associated risk tolerance strategy for the railroads.
Hendry next moved to a discussion of soft subgrades (i.e., areas of soft clays, muskeg, or peat) that have formed as a result of geological and climate factors. He noted that peat and muskeg have a high occurrence in Canada, while soft clay is more prevalent in the United States. Impacts from these soft subgrades can lead to train derailment. Hendry’s researchers put instruments in the ground at a few of these locations to capture the dynamics of the soils and characterize the negative effects, but they soon realized that they needed to be able to map out the soft subgrades on a much larger scale. He added that while track supervisors are aware of the location of soft subgrades, they did not previously have a common metric to quantify and compare these areas. Hendry referenced the 2009-2010 work from the University of Nebraska in which a technology had been developed to measure vertical track deflection. He adapted this technology (with support from the Federal Railroad Authority) to measure the extents of soft subgrades identified by the Transportation Safety Board.
Hendry described data collected over 7,000 miles of track in 31 test runs. From a series of vertical track deflection measurements obtained, he noted that the sections of jointed rail had much higher deflections than those of continuously welded rail. He added that the team did not focus on the superstructure (e.g., ties or joints)
___________________
4 The website for the Canadian Rail Research Laboratory is http://www.carrl.ca.
but rather focused only on the substructure. Mapping the vertical track deflection underneath the rails reveals that the magnitude of the deterioration relates directly to the subgrade conditions (see Figure 5.1).
Hendry mentioned a recent publication in which vertical track deflection measurements were converted to track modulus for comparison to the American Railway Engineering and Maintenance-of-Way Association (AREMA) standards. He added that AREMA publishes standards for goal track moduli—below 2,000 psi indicates poor track that will require much maintenance to keep the track in safe condition. As a result of this work, the Transportation Safety Board amended its watch list. The team also developed a method of using vertical track deflection for the evaluation of transitions between stiff and soft sections, which tend to be where the greatest difficulties exist—∆VTDsub. Now that these two metrics exist, the team considered how they impact the track. The team studied cyclic stress and impacts on track geometry. Having collected 6 years of track geometry data, the researchers were looking for defects that exceed threshold values set by the railway and by the regulators. The data reveal that when there are no transitions in stiffness (and thus no deflection), few defects form. Hendry’s team concluded that most of the track
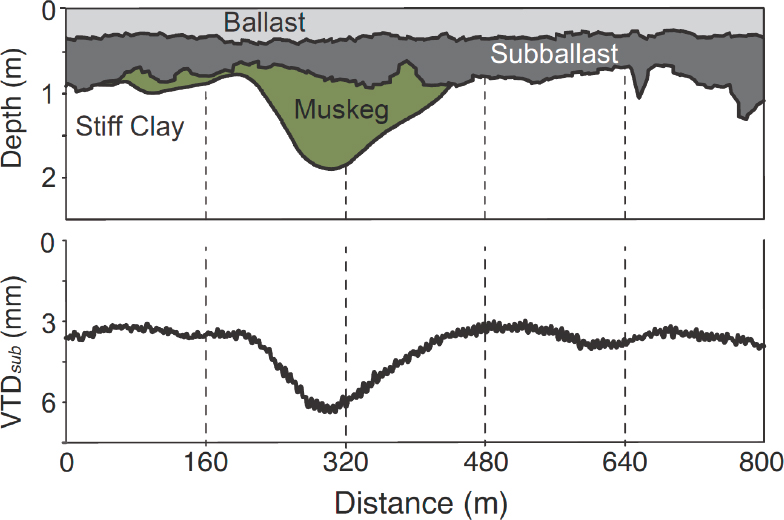
geometry problems on tracks with poor subgrade conditions are dominated by the magnitude of track modulus and variations in track modulus.
Hendry provided a brief overview of another project emerging from the Canadian Rail Research Laboratory that studies whether it is possible to estimate cyclic stresses induced by the rail based on vertical track deflection at any given location. A probability distribution of stresses within the rail based on the distribution of types of loads applied is being developed. He hopes that this work will lead to the development of a reliability index for the rail.
The Canadian Rail Research Laboratory is also collaborating with the National Research Council of Canada to study vehicle dynamics and variations in load by utilizing an instrumented wheel set and working with the Canadian National Railway to develop a qualitative risk assessment tool and to eventually develop a quantitative risk assessment tool to better allocate resources and evaluate the effectiveness of risk mitigation measures. Both efforts are oriented toward prevention and mitigation of potential consequences and are associated with qualitative analysis, hazard metrics, derailment causes, automation for practical implementation, and frameworks for future quantification and increased resolution. He defined hazard ranking as the likelihood multiplied by the consequence factor and noted that track geometry, rail breaks, natural hazards, wheels, and brakes, for example, all play a role in risk and mitigation strategies. Hendry emphasized that such tools will be valuable only if they inform the decision-making process.
Discussion
In response to a question from Kern about the weight classifications for Canada’s rail lines, Hendry noted that most of the mainline track is at 286,000 lb, although there are a few branch lines at 262,000 lb. Kern also asked about changes that need to be made to the original vertical track deflection technology, and Hendry responded that the University of Nebraska is in the process of refining the system in accordance with Harsco’s standards. Once this is complete, Canadian National plans to implement the system in a track geometry vehicle with both constant supervision and constant power supply to enhance reliability. De la Garza asked whether Hendry found that the higher probability of derailment occurred at the transition zone in which the ∆VTDsub was the highest as well as whether that result matched the historical derailment data. Hendry acknowledged that those two data sets have not yet been pulled together and believes that the data set is too sparse to draw conclusions about derailments.










