
2
Characterization of Fishing Gear

Most studies on the effects of fishing gear on the seafloor have been focused on trawl and dredge fisheries. A significant portion of the landings of finfish and shellfish from U.S. coastal waters bottom is made with contact, mobile fishing gear. Bottom trawls catch mostly groundfish and shrimp; dredges are used primarily for scallops and clams. Because different gear types cause different types of seafloor disturbance, it is important to understand the nature of the gear used in the fisheries before considering the effects of those fisheries on habitat. Other gear, such as pelagic trawls and seines, are not included in this chapter because they either have less contact with the seafloor or they represent a minor fraction of the total fishing effort.
Fishing gear that is dragged over the seabed or through the water is called mobile gear. All bottom-contact, mobile fishing gear disturbs the seafloor to some extent. The dragged gear generally includes a bag constructed of synthetic webbing or metal rings and chain links that collect the catch. It is classified as active fishing gear because the animals do not voluntarily enter the gear; they are either swept up from the seabed or netted from the water by the gear. As fishermen strove to fish more efficiently, dragged gear evolved to cover greater areas, or sweeps, of the seafloor. Dragged gear initially was deployed from handpowered boats, then sailing vessels, and finally from diesel-powered ships, some with engines greater than 1000 horsepower (HP).
Mechanization of fisheries with powerful engines and winches allowed larger gear to be towed faster and handled with less labor. Improved vessel design made it possible for fishermen to travel farther from their home ports and to fish under adverse weather conditions. Improvements in fishing vessel electronic navigation equipment from radio direction finders (LORAN), collision avoidance equipment, radar, and finally satellite-based navigation, such as global positioning systems (GPS), have increased fishing efficiency. The application of sonar technology to fish finding and to mapping the seabed has improved the ability of fishermen to target areas of the seabed that were not previously accessible to dragged gear. Technology also has helped fishermen avoid sites where rough seabed terrain could result in the loss or damage to gear (Box 6.3). Dragged gear has developed from small shellfish rakes towed by hand-paddled canoes to groundfish trawls that are equipped with net mouth openings that in some cases exceed 50 × 100 m.
Trawling off the United States began in the early 1900s, and at about the same time on the Atlantic and Pacific coasts (between 1901 and 1905). By 1971, trawling was considered “a most efficient method of offshore fishing” (Shapiro, 1971). Trawling extended rapidly along the Atlantic coast and into the Gulf of Mexico and became the dominant method of catching fish and shrimp for human consumption. Although trawl fishing also spread along the Pacific coast, the relatively narrow continental shelf and limited West Coast markets led to establishment of a smallboat fishery (generally less than 25 m in length) until the advent in the late 1960s of foreign fisheries.
After World War II, distant water foreign trawl fisheries developed off the New England states, along the Pacific coast, and in the Bering Sea and Gulf of Alaska. Those foreign fisheries were largely phased out by
1990 with the implementation of the Magnuson-Stevens Fisheries Conservation and Management Act (1977), which extended U.S. jurisdiction over fishery resources throughout the newly declared 200 mile exclusive economic zone. Large-scale domestic catcher–trawler and mothership operations arose in the waters off Alaska (Ianelli and Wespestad, 1998) and from the coast of northern California to Washington. In New England, the trawl fisheries also expanded as larger, more efficient vessels were introduced into the fleets. Currently, there are major groundfish trawl fisheries in New England and Alaska. The shrimp trawl fishery dominates in the Gulf of Mexico and in shallow waters off the coasts of the Carolinas and Georgia. Groundfish and shrimp trawl fisheries operate off the coasts of Washington, Oregon, and California.
DREDGE GEAR
Most dredges are rakelike devices that use bags to collect the catch. They typically remove molluscan shellfish from the seabed, but occasionally are used for crustacea, finfish, and echinoderms. Dredges take either epifauna or infauna; the design details of the gear are fauna specific. On soft bottoms, the dredge flattens the microrelief on the seabed (wave-ripples) and resuspends fine sediments. On hard rocky bottoms, the dredge scrapes off epibenthic organisms and disturbs the substrate.
In estuarine waters, dredges are used to collect clams, oysters, conch, and crabs. The oyster dredge consists of a steel frame, 0.5–2.0 m wide, with an eye and “nose” or “tongue” and a blade with teeth. The tow chain or wire and a bag for the catch are attached to the frame. The dredge is towed slowly (<1 m/s) in circles, from vessels that are 7–15 m long. Similar dredges are used to catch blue crabs in the mid-Atlantic region during the winter. Stern-rig dredge boats (averaging 15 m long) drag two dredges in tandem from a single chain warp. The dredges are equipped with long teeth (10 cm) that dig the crabs out of the bottom. The same gear is used in the Chesapeake Bay to catch whelk in summer and mussels in fall.
In the soft clam fishery, which occurs in shallow estuarine waters, the dredge head (manifold and blade) is attached to a conveyor or belt that carries the materials retained on the blade to the working deck of the vessel. These dredge vessels (generally about 15 m long) are restricted to shallow water—less than one-half the length of the escalator. Because soft clams live in shallow waters (2–6 m), this poses few limitations for the small vessel operators who use this gear.
Offshore, large dredges catch sea scallops, which inhabit a sand–gravel–cobble bottom and live on the surface of the seabed. Because scallops sense and retreat from slow-moving dredges, scallop dredges are towed at speeds of up to 2.5 m/s. The scallop dredge has a steel frame with a tongue with an eye, a blade with no teeth, and a bag (Figure 2.1). The width or mouth opening of the dredge ranges from 3.0 to 4.5 m, and dredge weight varies from 500 kg to 1000 kg. The largest scallop dredge vessels, about 60 m long drag two 4.5 m dredges, one from each side of the vessel, and they use winches and navigational electronics to maintain high efficiency. Scallop dredges disturb the seabed. Disturbance of the seabed by dredges is required to dislodge scallops for capture in the net.
Special methods are used to gently extract clams that burrow in sediments. Water jets are directed into the seabed to liquefy the sediment suspending the clams up in a sediment slurry. This blade sieves the clam– sediment slurry. The hydraulic clam dredge is used offshore to collect surf clams and ocean quahogs and inshore to collect soft clams. Hydraulic dredges are efficient, but they restructure sediments and disturb sediment biota.
Offshore vessels (>30 m) slowly tow dredges as wide as 4.5 m across the seabed. The vessels have
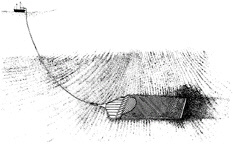
FIGURE 2.1 Action of a scallop and mussel dredge as it is dragged over a soft bottom seabed. The micro-relief of the seabed is smoothed as the dredge is towed over it. The gear in this figure is representative of scallop dredges used in many U.S. fisheries (DeAlteris et al., 1999; used with permission from American Fisheries Society).
large hydraulic pumps that inject water into the sediment through flexible hoses connected to a manifold with multiple nozzles ahead of the blade of the dredge. The dredge is towed slowly so as to not exceed the liquefaction rate. When operated correctly, these dredges are highly efficient, taking as much as 90 percent of the clams in their path.
Management of effort in dredge fisheries is generally achieved with time and area closures and with restrictions on the size (blade width and weight) of dredges, the number of dredges, and the size and horsepower of the towing vessels.
TRAWL GEAR
As fishermen sought to increase efficiency, their vessels became larger and more powerful. This facilitated the evolution of dredges into beam trawls and otter trawls.
Beam Trawls
With the beam trawl, the steel frame used previously in dredges became larger and lighter and the bag became larger and funnel-shaped to concentrate the catch in a cylindrical webbing section, called the codend. The first beam trawls were towed by sailing vessels, but today large beam trawls, with mouth openings of 15–20 m, are towed from both sides of high horsepower trawlers. Beam trawls do not open or sweep areas that are as large as those covered by otter trawls, but are used in selected flatfish fisheries because the beam maintains a constant opening and allows for the attachment of many heavy tickler chains to the frame. The chains disturb the seabed ahead of the sweep of the net to stimulate an escape response in flatfish that have burrowed into the sediment. The gear is towed quickly, up to 2.5 m/s so escape is unlikely and catch efficiency is high.
The frame of the beam trawl consists of an elevated pipe or beam and shoes that tend the seabed at each side. The beam is the site of attachment both for the upper section of the net and for the bridle, which distributes the towing force. The vertical opening of the net is restricted to the height of the beam above the seabed. The sweep of the net is attached to the shoes of the beam, as are tickler chains, if they are used.
Beam trawls are used in flatfish fisheries in northern Europe to catch sole and other groundfish species, and they have been used in experimental fisheries for monkfish, shrimp, and other demersal species in the United States. A modification of the traditional beam trawl is the plumbstaff trawl used by small gillnet vessels (about 10 m) in Alaska. Beam trawls are sometimes used in scientific sampling because they have fixed mouth openings that allow for accurate determination of sampling areas.
In Florida, roller frame trawls are used to harvest bait shrimp. They are similar to beam trawls in that there is a rectangular, rigid frame that holds the net open. The bottom of the frame supports freely turning, slotted rollers that allow the trawl to move over rough bottoms with less scraping of the seafloor than is typical with otter trawls (Barnette, 2001).
Otter Trawls
Otter trawls developed as fishermen sought to increase the horizontal opening of the trawl mouth, but without the cumbersome rigid beam (Figure 2.2). In the late 1880s, Musgrave invented the otter board, a water-plane device that when used in pairs, each towed from a separate wire, opens the net mouth horizontally and holds the net on the bottom. Initially, all otter boards were connected to the wing ends of the trawl, as they are today in the shrimp trawl fishery. In the 1930s, the Dan Leno gear was developed in France by Vigarnon and Dahl. This gear allowed the otter boards (doors) to be separated from the trawl wing ends using
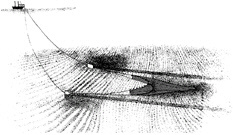
FIGURE 2.2 Action of bottom trawl as it is dragged over a soft-bottom seabed. The otter boards disturb the seabed creating visible tracks and suspending clouds of sediment in their wake. Small-scale sediment relief is smoothed in the path of the trawl net (DeAlteris et al., 1999; used with permission from American Fisheries Society).
cables or “ground gear.” This technology increased the effective area swept from the distance between the net wings to the distance between the doors. The ground gear can be as long as 200 m, thus increasing the area swept by the trawl as much as three-fold.
The funnel-shaped bottom trawl net consists of upper and lower sections joined at seams (a twoseam net), called gores. Some fourseam bottom trawls also have side panels to increase vertical opening. The mouth of the trawl net consists of jib and wing sections in the upper and lower panels. A “square” section forms a roof over the net mouth. The body of the trawl net includes belly sections, leading to the codend, where the catch is collected. The webbing is attached to a rope frame consisting of a headrope along the leading edge of the upper panel, and a footrope along the leading edge of the lower panel. The sweep, which tends bottom as the net is towed, is attached to the footrope. The headrope is equipped with floats that open the net mouth vertically. The headrope and footrope or sweep are attached to bridles (also called legs) at the wing ends that lead to the ground wires and the trawl doors.
|
Box 2.1 Physical Disturbance of the Seabed Bottom trawl disturbance of the seabed is principally a function of bottom type. On sand and mud bottoms, the trawl door scars consist of small mounds of sediment adjacent to a trough (Figure 2.4). Turbulence created by the passage of the trawl door resuspends fine sediment into the water column, as does the sweep of the trawl net when it scrapes the sand and mud seabed (Figure 2.5). On gravel, cobble, and bedrock bottoms, the trawl doors and the net sweep scrape along the seabed, removing epibenthic organisms and disturbing otherwise stable substrate (Figure 2.6). Small inshore trawlers (15 m), powered by 100+ HP engines, tow small nets (20 m sweep length), have short bridles (10 m) and ground gear (20m), and have a 20 m span between the trawl doors. Large offshore trawlers (50 m), powered by 1000+ HP engines, tow large nets (50 m sweep length), have long bridles (50m) and ground gear (200 m), and spread the opening 100 m between the trawl doors. Large vessels with bigger gear sweep larger areas of the seabed (Figure 2.7). |
The trawl doors, ground gear, and sweep all disturb the seabed as the gear is towed on the bottom (Box 2.1). The magnitude of the interaction is a function of the design and operation of the specific trawl component and the nature of the seabed. Otter doors range in design from the traditional flat, rectangular boards that create great turbulence in their wake to the modern slotted or foil board that reduces turbulent drag by maximizing hydrodynamic efficiency. Trawl sweeps range in design from simple looped chain sweeps used on smooth, soft bottoms to large roller and rockhopper sweeps used on hard, rough bottoms (Figure 2.3). The development of this more sophisticated trawl sweep technology (rollers and rockhoppers)—combined with sonar technology and the precise navigation afforded by GPS—allows fishermen to trawl areas of the seabed previously considered too rough to fish with mobile gear. However, sonar and GPS also have made it easier for fishermen to avoid areas with rough seabed and thus minimize damage and loss of gear.
There are bottom trawl fisheries for demersal species on all U.S. coasts. In the northeast, 15–50 m vessels fish in waters that are 10–400 m deep. Small mesh nets catch northern shrimp, silver hake, butterfish, and squid. Large mesh trawls catch cod, haddock, flounders, and other large species. Those trawls typically are rigged with long ground wires that create sand clouds on the seabed, herding the fish into the trawl mouth. In the southeast and Gulf Coast areas, small mesh trawls catch shrimp. Because shrimp cannot be herded, shrimp trawl nets are usually connected directly to the trawl doors. Southern shrimp trawl vessels tow two to four trawls from large booms extended from each side of the vessel. On the West Coast, stern trawlers catch shrimp, flatfish, and various gadoid and rockfish species. Factory trawlers or catcher processors, from 50–100 m long, catch, process, and freeze their products onboard.
Pair bottom trawling, once used to catch groundfish in New England waters, is undertaken by two vessels towing a single net. The separation of the towing vessels is used to open the net mouth horizontally. Pair bottom trawls are generally no larger than nets towed by single vessels. The advantage of pair bottom trawling is that considerably more ground gear can be used so as to increase the area swept, due to the reduction in drag resulting from the absence of trawl doors. Use of this gear is now prohibited in the New England groundfish fisheries.
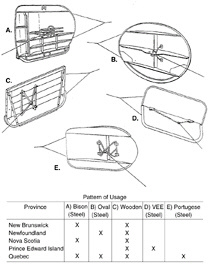
FIGURE 2.3 A) Examples of various trawl door designs used in bottom trawling fisheries. The doors illustrated in a), b), d), and e) are made of steel, and door c) is made of wood (used with permission from Canadian Fishery Consultants Limited).

FIGURE 2.3 B) Examples of groundropes used for bottom trawl nets. This figure illustrates a range of the types of groundropes used in trawling gear (used with permission from Canadian Fishery Consultants Limited).
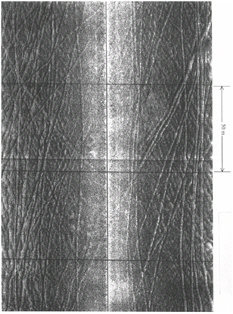
FIGURE 2.4 Side-scan sonar digital image (50 m × 100 m) showing 10+ bottom scars generated by mobile fishing gear in lower Narragansett Bay, Rhode Island (DeAlteris et al., 1999; used with permission from American Fisheries Society).
CONCLUSION
After the passage of the Magnuson-Stevens Act in 1976, the United States promoted the expansion and increased efficiency of the domestic fishing fleet. This included changes in trawl and dredge gear that increased the capacity of fisheries to cover large areas and to reach deeper and rougher habitats. Larger, more powerful boats pulling gear with wider sweeps increased the amount of area potentially affected. Newer gear, such as the raised footrope trawl used in the Gulf of Maine whiting fishery, has been designed specifically to reduce habitat damage.

FIGURE 2.5 Sand cloud generated by a trawl door as it is towed over a flat sand seabed (Main and Sangster, 1981).
FIGURE 2.6 Trawl door on hard seabed showing the absence of a sand cloud pattern. Coarser grained sediments are briefly suspended but rapidly settle (Main and Sangster, 1981).
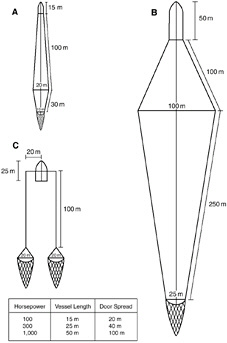
FIGURE 2.7 Scale drawing of representative sizes of trawl gear. This drawing illustrates the relationship between the sweep of the bottom trawl gear and the vessel size.






