
2
Geodesy for the Benefit of Society
The modern global geodetic infrastructure was developed over the past several decades primarily to support activities in the scientific and military communities. Nevertheless, the physical, computational, and organizational infrastructure developed for these communities now support a wide range of applications. Like roads and highways that facilitate interstate commerce, the geodetic infrastructure provides significant benefits to society by enabling an astonishing array of activities and innovations, including autonomous navigation, precision agriculture, civil surveying, early warning systems for hazards, and improved floodplain mapping. This chapter describes current capabilities made possible by the precise global geodetic infrastructure, highlights areas that could benefit from improvements in the geodetic infrastructure, and explores potential future applications.
CURRENT BENEFITS OF THE GEODETIC INFRASTRUCTURE
Accurate Topography Maps
Topography (land surface elevation, also called terrain) provides an important, basic component for many applications. Scientists use topographic maps to study plants and animals, geology, hazards, and erosion. The National Research Council (NRC) (2007b, p. 2) found that “topographic data are the most important factor in determining water surface elevations, base flood elevation, and the extent of flooding and, thus the accuracy of flood maps in riverine areas.” Accurate topographic maps also are important for civilian applications from aircraft navigation to hiking and backpacking. The base layer in Google Earth© is constantly being updated using the latest topographic data. Topography is also important for such commercial applications as determining the optimal placement of cell-phone towers, planning pipelines, and routing trucks for fuel efficiency. The most accurate global map of the Earth’s topography (to an accuracy of 5–10 vertical meters) was obtained during the 11-day Shuttle Radar Topography Mission (SRTM) in 2000 (Farr et al., 2007). The next generation of U.S. topography surveys is being performed at a much higher vertical accuracy—an accuracy of 10 centimeters or better. These high-accuracy surveys are performed by aircraft radar
and LiDAR (Light Detection and Ranging) and make extensive use of the geodetic infrastructure for determining flight paths to centimeter accuracy after the data are collected.
Improved Floodplain and Inundation Maps
Floodplain maps are used to predict how water will flow on the Earth’s surface and are crucial to assessing the risk of floods. The creation of floodplain maps is an important part of the National Flood Insurance Program because these maps are used for setting flood insurance rates, regulating floodplain development, and communicating the one percent annual chance of flood hazard. The Federal Emergency Management Agency (FEMA) is undertaking an ambitious five-year program to update and make digital the floodplain maps of the nation (NRC, 2007b). These maps are derived from a combination of topographic data (elevations to an accuracy of 10 centimeters or better) and map of the geoid (refer to Figure 1.2), because water flows downhill relative to the undulating geoid surface. The North American Vertical Datum of 1988 (NAVD 88) is the official reference surface against which elevation measurements are made in the United States. NAVD 88, however, has an average bias of 1 meter and erroneous tilt amounting to an additional 1 meter error across the coterminous United States; it also has a 1–2 meter bias in Alaska (Childers et al., 2009a). Improving the accuracy of floodplain maps, therefore, will require improving the vertical datum, which in turn will require the use of either denser and more accurate geodetic leveling observations or Global Positioning Systems (GPS) measurements and a high-accuracy geoid model (NRC, 2007b). The National Geodetic Survey (NGS) has embarked on the GRAV-D Project (Gravity for the Redefinition of the American Vertical Datum), an airborne gravity mission to measure gravity and its changes more accurately than was previously achievable (NOAA, 2010; see Box 5.2). The goal of GRAV-D, therefore, is to model and monitor the Earth’s geoid, which serves as the reference surface for zero elevation. The new gravity-based vertical datum resulting from this project will be accurate at the 2 centimeter level for much of the country. The benefit of GRAV-D to society has been estimated at $4.8 billion over 15 years (Leveson, 2009).
Uses of Real-Time Geodetic Positions
Accurate real-time locations are used in a wide range of commercial applications and services. Accurate positions of Global Navigation Satellite System (GNSS)/GPS satellites in their orbits and a terrestrial reference frame are used to determine the location of an object on the surface of the Earth accurately. The NGS Continuously Operating Reference Station (CORS) Network, which enables precise real-time positioning for applications, including precision agriculture, surveying, and even GPS-guided snowplows, makes extensive use of the global geodetic infrastructure. The CORS Network, in turn, is a fundamental component of the National Spatial Reference System (NSRS),1 which provides a highly accurate and consistent geographic reference framework throughout the United States, allowing various layers of data to be spatially registered and integrated within geographic and land information systems (GIS/LIS). The NSRS has been estimated to provide benefits equivalent to $2.4 billion annually (Leveson, 2009). The NSRS, in turn, is the backbone of the National Spatial Data Infrastructure (NSDI), which was recognized in a 2004 report by the Federal Geographic Data Committee as the “primary mechanism for assuring (national) access to reliable geospatial data” (NSDI Future Directions Planning Team, 2004).
Real-time positioning data are often used by commercial augmentation services that provide corrections to standard GPS positioning to a global set of customers requiring sub-meter and deci-
meter-level real-time positioning. These customers are involved, for example, in the offshore oil industry, precision agriculture, and certain marine applications, which require high reliability and global availability. Operators of earth-orbiting imaging satellites require rapid and precise geolocation of their images in order to provide rapid service to their customers. The global nature of many of these applications requires the products to be accurate in a well-defined and stable terrestrial reference frame.
Global Positioning System Monitoring and Improvement
The global geodetic infrastructure also contributes to improvements in the Global Positioning System (GPS). For example, geodetic research has led directly to the addition of a third GPS frequency and to the laser retroreflectors that may be added to future GPS satellites. In addition, the NASA Global Differential GPS (GDGPS) System2 uses the global GPS network to perform integrity monitoring and situational assessment of GPS in real time for the U.S. Department of Defense (NRC, 1995b). The GDGPS is also the basis for the real-time orbit improvement for the Advanced Control Segment, an Air Force-sponsored project that will improve the accuracy of GPS.
Accurate Satellite Orbits
Satellites now provide a range of crucial services, including weather forecasts, communications, and land-use monitoring. By simply including a GNSS/GPS receiver on any satellite, it is possible to determine where that satellite is in its orbit. When the highest accuracy is required, it is necessary to supplement GNSS/GPS data with information from the global geodetic infrastructure, including the International GNSS Service network and the International Terrestrial Reference Frame (ITRF). In addition, models of the Earth’s gravity field based on geodetic observations, as well as geodetic observations on the location of the Earth’s rotation axis and rotation rate, are needed to determine the gravitational forces on the satellite (see Chapter 3). The existing geodetic infrastructure makes it possible to accurately position satellites for a wide range of applications; this capability is crucial to many of the proposed “Decadal Survey” missions, especially radar and laser altimetry missions (for example, SWOT, LIST, and ICESat-II), radar imaging missions (for example, DESDynI), and gravimetry missions (for example, GRACE-II) (NRC, 2007a).
Space Exploration
In addition to applications focused on the Earth, geodesy has played and will continue to play an important role in the exploration of the solar system and regions beyond. Systems that prove successful on the Earth can be applied to other planetary bodies. For example, the GRAIL (Gravity Recovery and Interior Laboratory) project uses an approach for determining the moon’s gravity field that was pioneered by the GRACE (Gravity Recovery and Climate Change) project focused on the Earth.
Until we actually dig into the Earth or another planet, we must rely on information derived from surface observations, such as seismic and geodetic measurements, to learn about the interior structure. Zumberge et al. (2009) provide the example of Mars, which has had the precession of its rotation axis measured, and its gravity field and terrain mapped, using geodetic techniques. These observations have led to estimates of the size, mass, and physical state of the Martian core and to inferences about the seasonal variability of mass in the Martian polar icecaps.
In addition, the geodetic infrastructure is needed to track the location of spacecraft from Earth. As spacecraft get farther and farther away, the demand on the angular resolution of the tracking
|
2 |
NASA Global Differential GPS (GDGPS) System Website: http://www.gdgps.net |
becomes increasingly strict. The Voyager I and Voyager II spacecraft, launched in 1977, are now 17 and 14 billion miles from Earth, respectively. These spacecraft are so far away and so faint that to track them requires geodetic techniques that were developed to determine the position of quasars at the edge of the universe. These techniques require accurate geodetic information on the location of the tracking sites on Earth, as well as details of the Earth’s rotation axis (variations of the direction of the Earth’s spin axis and rate of rotation).
TRANSITION FROM INNOVATIVE RESEARCH TO FUTURE APPLICATIONS
The past several decades have seen an increase in the accuracy of geodetic positioning of approximately one order of magnitude per decade, from approximately 1–10 meters accuracy in the mid 1970s to approximately 1 millimeter currently. This tremendous advance is due not only to technological improvements and cost reductions but also to the coordination of the scientific community through global geodetic services, including the International GNSS Service, the International VLBI Service, the International Laser Ranging Service, and the International DORIS Service; to geodetic research that led to significant improvements in geodetic data analysis and accuracy; and to coordination between the scientific and civilian communities and government.
Recent advances have been spectacular; it is unclear whether the past rate of improvement can be sustained, but the evidence indicates that the future will bring significant advances in geodesy in the areas of temporal resolution, spatial coverage and resolution, and latency.3 The current trend is toward what might be called “geodetic imaging,” a description of the Earth’s continuous deformation at a high temporal and spatial resolution in near real time (see below, “Future Scientific and Technological Breakthroughs”). Many emerging applications take advantage of this trend. For example, real-time warning and response systems for hazards, including earthquakes, volcanic eruptions, tsunamis, and landslides, require both low data latency (delay of less than one second) and high temporal resolution (sampling rate of one hertz or higher). In addition, increased spatial and temporal coverage from geodetic techniques can improve weather forecasting, water-resource monitoring, studies of earthquake-related deformation, and research on how glaciers respond to climate change. Commercial applications including autonomous navigation and precision agriculture require wide spatial coverage and high accuracy in real-time. The development of near-real-time applications with high spatial and temporal resolution also places a new burden on the geodetic infrastructure, requiring it to be increasingly robust.
The geodetic infrastructure—and the research, analysis, and international coordination that support this infrastructure—will need to evolve to meet these challenges. The infrastructure required to make future applications a reality does not yet exist, and in most cases the research in these areas is not yet complete. A detailed discussion of the benefits to society of the global geodetic infrastructure can be found in Sahagian et al. (2009). Here, we review several developing and future applications.
Early Warning for Natural Hazards
For many centuries, humans have strived to provide warning of nature’s most violent and hazardous events. Some of these events—earthquakes, volcanic eruptions, and tsunamis—are caused by deformation of the Earth’s crust. Although these events cannot be predicted beforehand, rapid detection of them can lead to early warning and response. Even a few seconds of warning can allow people to take action that can save lives and reduce the cost of an event (see Box 2.1).
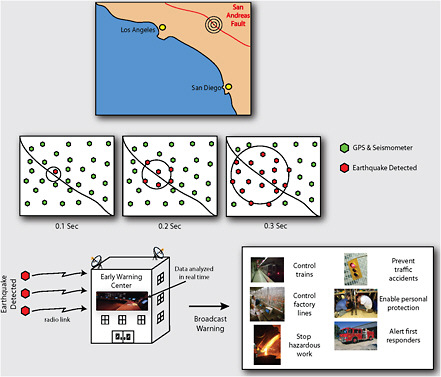
There are currently many nascent efforts to study how geodetic data can improve our capability for early warning. A critical question seismologists face when they sense seismic activity is: “Is this a small earthquake, or the first indications of a large one?” Because of the physics of seismic wave generation and propagation, that question is not easily answered with seismic data alone. Real-time geodetic data could help answer that question. In addition, even a sparse geodetic network delivering data in real-time could help scientists determine whether a large earthquake will generate landslides or a tsunami (see Blewitt et al., 2006), such as the large tsunami caused by the December 24, 2004, Sumatra earthquake (Plag and Pearlman, 2009).
For geodesy to contribute to early warning systems for such hazards, geodetic instrumentation (ground- or space-based, or both) is needed in the areas that are most likely to be affected. Further
infrastructure is required to collect, analyze, and interpret the data and to communicate it to the proper governmental authorities. All of this activity has to take place in as little time as one second for an earthquake. Due to the low tolerance for delay in such applications, the highest real-time accuracy is needed, which requires making full use of the global geodetic infrastructure. In addition, GNSS/GPS satellite orbits and Earth rotation variations would need to be extrapolated into the near future for accurate data analysis. Early warning systems for hazards also would rely on advance coordination and up-to-date station information. Demonstration of such approaches will have to be carried out under strict guidelines before they are integrated into societal response to these hazards.
Autonomous Navigation
In the United States, more than 33,000 people were killed in highway accidents in 2009 (National Highway Traffic Safety Administration, 2009). According to Urmson and Whittaker (2008), “[t]he prevailing belief in the automotive industry is that the benefit of passive safety systems such as seat belts and air bags has reached a plateau. To improve safety, vehicles must avoid crashes rather than attempt to survive them.”
The advent of precise positioning in real time has allowed the widespread development of autonomous vehicle navigation systems. The capability of these systems depends on the accuracy and robustness of the positioning systems; the accuracy of the geographic information system data against which the vehicle is referencing its location to find its position relative to other objects; ancillary sensors that allow fine-tuning of position and velocity information and the detection of obstacles; and the software that assimilates incoming sensor data and controls the vehicle.
GPS already has been successfully applied in autonomous vehicle navigation. One of the earliest applications of vehicle control using GPS dates to the early 1990s, when GPS systems were first used to perform automatic aircraft landings. There have been many successful applications of these methods, which often supplement the standard GPS satellite signals with an additional GPS signal from near the runway on which the aircraft will land (see LeMaster, 2003). Commercial GPS aircraft landing systems are now being certified by the Federal Aviation Administration (see Military and Aerospace Electronics, December 17, 2008). On land, the Defense Advanced Research Projects Agency’s (DARPA’s) Urban Challenge demonstrated that autonomous navigation in complex urban settings is possible (DARPA, 2007).
Improved accuracy of the GPS and other GNNS systems will benefit autonomous vehicle applications by improving real-time positioning capabilities and leading to improved GIS databases that allow vehicles to register their position against geographical features. Although the demands on the infrastructure are great and legal impediments such as liability will need to be addressed, real-time vehicular positioning with centimeter accuracy is a future possibility. The deployment of multiple GNSS systems will provide more robust positioning in areas of restricted sky visibility, such as urban centers.
Active Remote Sensing
Information about the surface of the Earth acquired from airborne or spaceborne platforms is a crucial aid to agriculture, forestry, resource management, and science. Remote electromagnetic sensing of land cover and land use, surface deformation due to earthquakes and groundwater pumping, and glacier thickness is now possible. One of the most challenging and potentially rewarding frontiers of geodetic science is the collection of active remote sensing data using unmanned aerial vehicles (UAVs), such as drones. These platforms offer several advantages over their spaceborne counterparts. The vehicles can stay aloft up to several days above a region of interest performing
wide area surveys or repeat-track analysis. Revisit intervals can be tailored for the phenomenon of interest, and UAVs can be used to rapidly respond to major events. Moreover, the aircraft and instrument packages for UAVs can be designed and deployed much more rapidly than their spaceborne counterparts. Lower altitude means less power is required for active sensors, and a shorter atmospheric path between the aircraft and the ground target increases the instruments’ accuracy. One could also envision, for example, fleets of autonomous aircraft flying in formation to synthesize a single large-aperture radar for wide-area topographic mapping and change detection.
Achieving these goals for UAVs requires high-accuracy, real-time navigation, both for public safety and for the accuracy of the data these vehicles collect, and would place high demands on the geodetic infrastructure. Present-day real-time navigation requirements for (manned) aircraft-based LiDAR are 1 meter and, for post-processing, 0.1 meter. However, as the LiDAR range precision is improved, real-time navigation requirements for high-precision surveys will likely be better than 1 meter, and the relative post positioning errors may need to be below 5 millimeters. Such high positioning precision will require a relatively dense array of ground GPS receivers.
Soil Moisture Mapping
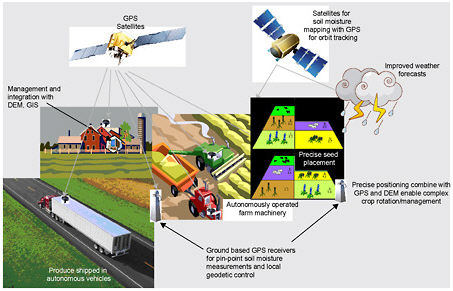
Society relies heavily on weather and climate forecasts to improve agricultural yields and to mitigate the impact of drought and extreme weather events. Chapter 3 discusses how the geodetic infrastructure contributes to innovative weather forecasting methods. Accurate measures of how much water is being stored in the soil can further improve those forecasts. The satellites developed specifically for this task (European Soil Moisture and Ocean Salinity (SMOS) and U.S. Soil Moisture Active and Passive (SMAP) satellites) are scheduled to be launched in the next decade, but these missions have limited lifetimes, do not measure soil moisture in real-time, and only repeat their ground sampling every 3–5 days.
Soil moisture satellites use radars that illuminate and measure the energy that is reflected by the land surface. They do this by taking advantage of the fact that wet soil interacts with the radar signal differently than dry soil. One of the challenges for soil moisture satellites is that they rely on calibration and validation from ground measurements (see Chapter 3). Ground measurements of soil moisture also are important because they illuminate variations in soil moisture on the local scale and provide a level of temporal sensitivity that is not available from satellites.
The best calibration for soil moisture satellites will come from the deployment of thousands of sensors around the globe. The global GNSS/GPS infrastructure may offer some of these calibration points. Larson et al. (2008) demonstrated that the GNSS/GPS signals that are reflected by land surfaces could be used to measure changes in soil moisture near continuously operating GNSS/GPS sites (see Chapter 4). The GNSS/GPS reflections sense the top layer of the soil surrounding the antenna in a region of approximately 1,000 square meters. This large spatial coverage is more beneficial than typical in situ measurements, which are sensitive to only about one liter of soil. In addition to showing a high correlation with traditional ground soil moisture instruments, using a preexisting GNSS/GPS receiver would make GNSS/GPS-derived soil moisture data available without additional cost. Since GNSS/GPS data are downloaded frequently, it also means the soil moisture data would be available for near-term climate modeling and weather forecasting.
Precision Agriculture
The use of geodetic technology for operating farm machinery, using the collection of techniques known as precision agriculture, is rapidly growing in the United States. Precision agriculture has agronomical, economical, and environmental benefits. These techniques can save on crop inputs by optimizing the application of synthetic fertilizer and crop seed and can aid in crop protection and
irrigation. Fertilizer, seed, and other products can be applied to fields with no skips, overlap/over-application, or deposition onto unwanted areas, thereby reducing waste and increasing yield. In addition, precise placement of seed can minimize tire/track compaction of the soil and eliminate crop trampling. When combined with leaf-sensing technology and remote sensing, post-emerge crop protection products such as pesticides can be applied on a variable-rate basis to meet the specific needs of a crop as it matures. Precision agriculture techniques also aid harvesting by allowing farmers to accurately apply “burn-down” products. These products hasten the ripening of grain, promoting even grain maturity across entire fields and thereby reducing the potential for “green,” or immature, crop to enter the harvest chain; reducing the likelihood of crop spoilage while in storage; and reducing artificial drying costs, which will result in less use of propane or natural gas.
Currently, precision agriculture practices are not directly based on the global geodetic infrastructure, but on correction systems like the Wide Area Augmentation System, which uses local correction services. These local services are used across the U.S. corn, cotton, sorghum, and soybean crop belts to provide the required accuracy. Developing the global geodetic infrastructure to the point where it could support real-time positioning at an accuracy of 1 centimeter would have several advantages for precision agriculture. First, the infrastructure would be accessible from any location without the need to develop and maintain local infrastructure. Second, it would increase the potential to integrate straightforwardly multiple sources of information (e.g., remote sensing imagery and terrain/topography) in a GIS-based framework. Integration with agriculture management systems also could provide automation for increasingly complex farm and crop management, including crop rotation and/or crop interlacing, and improve management of polyculture farms for sustainability (Box 2.2).
Coastal Wetland Monitoring
Coastal wetlands serve many important roles. They serve as a buffer to absorb storm surge when storms make landfall; they also have important ecological functions. But, they are increasingly vulnerable to sea-level change; to subsidence caused by pumping of groundwater, oil, and natural gas; and to other environmental impacts of increasing population densities near the coast. In these areas, centimeter-level changes in elevation or sea level can have dramatic consequences for coastal resources and can mean the difference between extensive wetland habitats and open water. Determining accurate elevations within coastal wetlands improves the understanding of processes affecting wetland dynamics, land loss, and the effects of pollution, such as from oil spills.
Obtaining accurate vertical measurements in coastal wetlands has been problematic for scientists, since instrumentation and techniques that work on either solid ground or over open water are difficult to use in this important transition region. As a result, the surface of the water within wetlands has been difficult to monitor with any accuracy or spatial/temporal resolution. However, there are several developments on the horizon that could contribute to this important societal need.
The GRAV-D survey proposed by the NGS (see “Improved Floodplain and Inundation Maps” above) will improve our knowledge of the relative water level (and its changes) for coastal wetlands by taking repeated airborne gravity surveys in these regions. The GRAV-D surveys would improve significantly the currently inaccurate gravity models in the coastal zone. NGS is also working with partners to extend the national network of passive survey control marks (“bench marks”) into the coastal zone.
In addition, the geodetic Interferometric Synthetic Aperture Radar (InSAR) and LiDAR techniques are capable of providing high-resolution observations of surface water-level changes in wetlands and floodplains (Wdowninski et al., 2008; Yang, 2005). The temporal resolution of this technique, as in other applications of InSAR (see Chapter 3), is currently limited by the availability
of InSAR data for the specific regions being monitored. In addition to accurate measurements of surface height, InSAR over wetlands can detect patterns in the water flow. This application will extend significantly the concept of “geodetic imaging” (see section “Future Scientific and Technological Breakthroughs”) for better monitoring of coastal wetlands.
FUTURE SCIENTIFIC AND TECHNOLOGICAL BREAKTHROUGHS
The global geodetic infrastructure, even at its current level, has enabled a wealth of applications that have commercial, scientific, economic, national security, and agricultural benefits. To a great extent, this infrastructure has been developed for science or military applications, but the accuracy and robustness of the infrastructure enables society at large to benefit. One of the catalysts for broadening the accessibility of the infrastructure has been the adoption of standards for data acquisition, data formats, data analysis, and data products. These standards have been developed in large part by the international scientific community and have proven so successful that they have been adopted
by agencies of the U.S. government and by GNSS/GPS equipment manufacturers.4 In addition to broadening the accessibility of the infrastructure, these standards enable the scientific research that has led to the order-of-magnitude per decade improvement in geodetic accuracy. As the goal now shifts to applications that require improved spatial and temporal resolution with low latency (real-time geodetic imaging), the demands on the geodetic infrastructure and the importance of universal standards will continue to increase. Many potential future breakthroughs, like fully autonomous transportation systems, are possible only with a highly robust geodetic infrastructure that provides accurate data products in real time in a universally accepted reference system.
As famously stated by Niels Bohr, “[p]rediction is very difficult, especially about the future” (Ellis, 1970, p. 431). Nonetheless, it is legitimate to ask whether the order-of-magnitude-per-decade performance improvement rate for precise geodesy is sustainable in the foreseeable future. Although it is questionable whether improving the ITRF to achieve a millionth of a meter accuracy is a sensible question, it is certainly clear that there is much room for advancement in space and time resolution for geodetic data. The challenges to achieving real-time geodetic imaging, however, are readily apparent. Consider doubling the horizontal resolution of any geodetic data set and updating it twice as often as in the past, and it is soon realized that this calls for acquiring, storing, processing, and analyzing eight times as much data. If users desired to improve the spatial resolution of the commonly used SRTM digital elevation datasets from 90 meters globally to 10 meters, they would have to be ready to deal with a dataset approximately 100 times larger. If capturing changes with time is of the essence, this factor can easily grow to be 1,000 times or more. Improving the vertical accuracy from 15 meters to 1.5 meters would not directly impact the data set size, but the information needed to generate the data set would increase by another factor of 100 to 1,000. With these improvements, data volumes could grow by a million-fold compared to today’s volumes. The fact is, LiDAR imaging of critical areas such as coastlines or earthquake faults is already pushing well beyond these limits in all four dimensions (see Wdowinski and Erriksson, 2009).
Perhaps further into the future it may be feasible to deploy very large (100-meter inflatable) radar antennas in geosynchronous orbit, permitting real-time InSAR imaging of the Earth’s deformation on a continental scale (“InSAR everywhere all the time,” Zebker, 2005). We also can imagine a steady microwave illumination of the Earth’s surface from geostationary or even lunar radar transmitters. With superior time transfer capabilities, bistatic radar imaging becomes possible: small inexpensive receivers in low Earth orbit could image the Earth’s surface interferometrically, much as optical sensors image the sun-illuminated surface now, except that this would be an all-weather capability.
SUMMARY
The applications reviewed in this section represent just a few of the current and future benefits of the geodetic infrastructure. Of course, it would not be unexpected if any predictions, short- or long-term, were far outstripped by reality. As the technology continues to mature, it becomes ever more accessible to an increasingly wide group of scientists, engineers, and entrepreneurs. Developers and users alike will increasingly be able to take advantage of geodetic methods, techniques, and systems without specialized knowledge of geodesy or related fields.
All the advances reviewed in this chapter are and will be made possible by an underlying geodetic infrastructure that is robust, reliable, and accurate. This infrastructure includes not only measurement systems and networks discussed in Chapters 3–5, but also the global services that analyze and maintain standards for these systems, as well as the analysis that knits together these systems.
Providing the infrastructure capable of supporting the societal needs of today and the future is the great challenge for the field of geodesy. In the next section, the committee provides recommendations for meeting this challenge.










